JP5711312B2 - Driving simulation apparatus and driving simulation program using portable terminal - Google Patents
Driving simulation apparatus and driving simulation program using portable terminal Download PDFInfo
- Publication number
- JP5711312B2 JP5711312B2 JP2013145512A JP2013145512A JP5711312B2 JP 5711312 B2 JP5711312 B2 JP 5711312B2 JP 2013145512 A JP2013145512 A JP 2013145512A JP 2013145512 A JP2013145512 A JP 2013145512A JP 5711312 B2 JP5711312 B2 JP 5711312B2
- Authority
- JP
- Japan
- Prior art keywords
- steering
- virtual vehicle
- angle
- steering angle
- ratio
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000004088 simulation Methods 0.000 title claims description 80
- 238000006243 chemical reaction Methods 0.000 claims description 21
- 230000004044 response Effects 0.000 claims description 8
- 238000004364 calculation method Methods 0.000 description 41
- 230000001133 acceleration Effects 0.000 description 36
- 230000008859 change Effects 0.000 description 23
- 238000010586 diagram Methods 0.000 description 9
- 230000006870 function Effects 0.000 description 8
- 238000000034 method Methods 0.000 description 6
- 230000008569 process Effects 0.000 description 6
- 238000004891 communication Methods 0.000 description 4
- 230000006399 behavior Effects 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000004043 responsiveness Effects 0.000 description 1
Images










Landscapes
- Processing Or Creating Images (AREA)
Description
本発明は、コンピュータを用いて仮想車両の運転を制御する運転シミュレーション装置及び運転シミュレーションプログラムに関する。 The present invention relates to a driving simulation apparatus and a driving simulation program that control driving of a virtual vehicle using a computer.
従来、車の運転を模擬してプレイヤーが車を操作するドライビングゲームやドライビングシミュレーションが開発されている。このようなドライビングゲームやドライビングシミュレーションでは、例えばパーソナルコンピュータのキーボードがプレイヤーの入力装置として用いられることがある(特許文献1参照)。 Conventionally, driving games and driving simulations in which a player operates a car by simulating driving are being developed. In such a driving game or driving simulation, for example, a keyboard of a personal computer may be used as an input device for a player (see Patent Document 1).
近年では、スマートフォンやタブレット端末等、持ち運びが可能な携帯端末装置であるモバイル端末が普及している。このようなモバイル端末に提供されているドライビングゲーム等は、例えばモバイル端末に内蔵されている加速度センサを用いて検出したモバイル端末の傾き等から仮想車両のステアリング操作を模擬しているものがある。 In recent years, mobile terminals that are portable terminal devices such as smartphones and tablet terminals have become widespread. Some driving games and the like provided for such mobile terminals simulate a steering operation of a virtual vehicle based on, for example, the inclination of the mobile terminal detected using an acceleration sensor built in the mobile terminal.
しかしながら、このようなドライビングゲーム等では、仮想車両のステアリング操作において、例えばプレイヤーがモバイル端末を傾けた場合に、プレイヤーの想定以上に仮想車両のステアリングが操舵されてしまうことがある。このため、プレイヤーが仮想車両のステアリングを微調整するのは難しく、モバイル端末で仮想車両の運転を模擬するには運転操作のリアリティに欠けるといった問題があり、この点で改善が求められていた。 However, in such a driving game or the like, in the steering operation of the virtual vehicle, for example, when the player tilts the mobile terminal, the steering of the virtual vehicle may be steered more than the player expects. For this reason, it is difficult for the player to fine-tune the steering of the virtual vehicle, and there is a problem that the reality of driving operation is lacking in order to simulate the driving of the virtual vehicle with a mobile terminal, and improvement has been demanded in this respect.
本発明は、上述した課題を解決すべくなされたものであり、その目的とするところは、モバイル端末で仮想車両をよりリアリティのある運転操作で模擬することの可能な運転シミュレーション装置を提供することにある。 The present invention has been made to solve the above-described problems, and an object of the present invention is to provide a driving simulation apparatus capable of simulating a virtual vehicle with a more realistic driving operation on a mobile terminal. It is in.
上記の目的を達成するべく、本発明の第1の態様の運転シミュレーション装置は、表示部と、慣性センサと、制御部と、を備え、前記制御部は、仮想車両のステアリング舵角を記憶する手段と、前記慣性センサの出力信号から操作角度を演算する手段と、前記仮想車両のステアリングの最大操舵角に対する前記仮想車両のステアリング舵角の割合と、最大操作可能角度に対する前記操作角度の割合との差に基づいて、前記仮想車両のステアリング舵角の割合と前記操作角度の割合との差に対する前記仮想車両の操舵量の関係を予め規定した変換曲線から前記仮想車両の操舵量を演算する手段と、その演算した操舵量に基づいて、記憶されている前記仮想車両のステアリング舵角を更新する手段と、更新された前記仮想車両のステアリング舵角を反映した動画を作成して前記表示部に表示する動画表示手段と、を備える。 In order to achieve the above object, the driving simulation apparatus according to the first aspect of the present invention includes a display unit, an inertial sensor, and a control unit, and the control unit stores a steering angle of the virtual vehicle. Means, a means for calculating an operation angle from an output signal of the inertial sensor, a ratio of the steering angle of the virtual vehicle to a maximum steering angle of the steering of the virtual vehicle, and a ratio of the operation angle to a maximum operable angle Means for calculating the steering amount of the virtual vehicle from a conversion curve in which the relationship of the steering amount of the virtual vehicle to the difference between the ratio of the steering angle of the virtual vehicle and the ratio of the operation angle is determined based on the difference between And a means for updating the stored steering angle of the virtual vehicle based on the calculated steering amount, and the updated steering angle of the virtual vehicle And create a video that reflects and a video display means for displaying on the display unit.
本発明の第1の態様の運転シミュレーション装置によれば、仮想車両のステアリングの最大操舵角に対するステアリング舵角の割合と、最大操作可能角度に対する操作角度の割合との差を求めることによって、相対的なステアリング舵角と相対的な操作角度との間に差が生じたか否かを識別することができる。この差が生じた場合に、仮想車両のステアリング舵角の割合と操作角度の割合との差に対する仮想車両のステアリング舵角の補正量の関係を予め規定した変換曲線から仮想車両の操舵量を求め、この操舵量でステアリング舵角を補正することにより、現実の車両に近似したステアリング操舵を模擬することができる。従って、よりリアリティのある運転シミュレーションを実現することが可能となる。 According to the driving simulation apparatus of the first aspect of the present invention, by calculating the difference between the ratio of the steering rudder angle to the maximum steering angle of the virtual vehicle steering and the ratio of the operation angle to the maximum operable angle, It is possible to identify whether or not there is a difference between the correct steering angle and the relative operation angle. When this difference occurs, the steering amount of the virtual vehicle is obtained from a conversion curve that predefines the relationship of the correction amount of the steering angle of the virtual vehicle with respect to the difference between the ratio of the steering angle of the virtual vehicle and the ratio of the operation angle. By correcting the steering angle with this steering amount, it is possible to simulate steering that approximates an actual vehicle. Therefore, a more realistic driving simulation can be realized.
本発明の第2の態様の運転シミュレーション装置は、上述した第1の態様において、前記変換曲線は、ロジスティック曲線であることを特徴とする。 The driving simulation apparatus according to the second aspect of the present invention is characterized in that, in the first aspect described above, the conversion curve is a logistic curve.
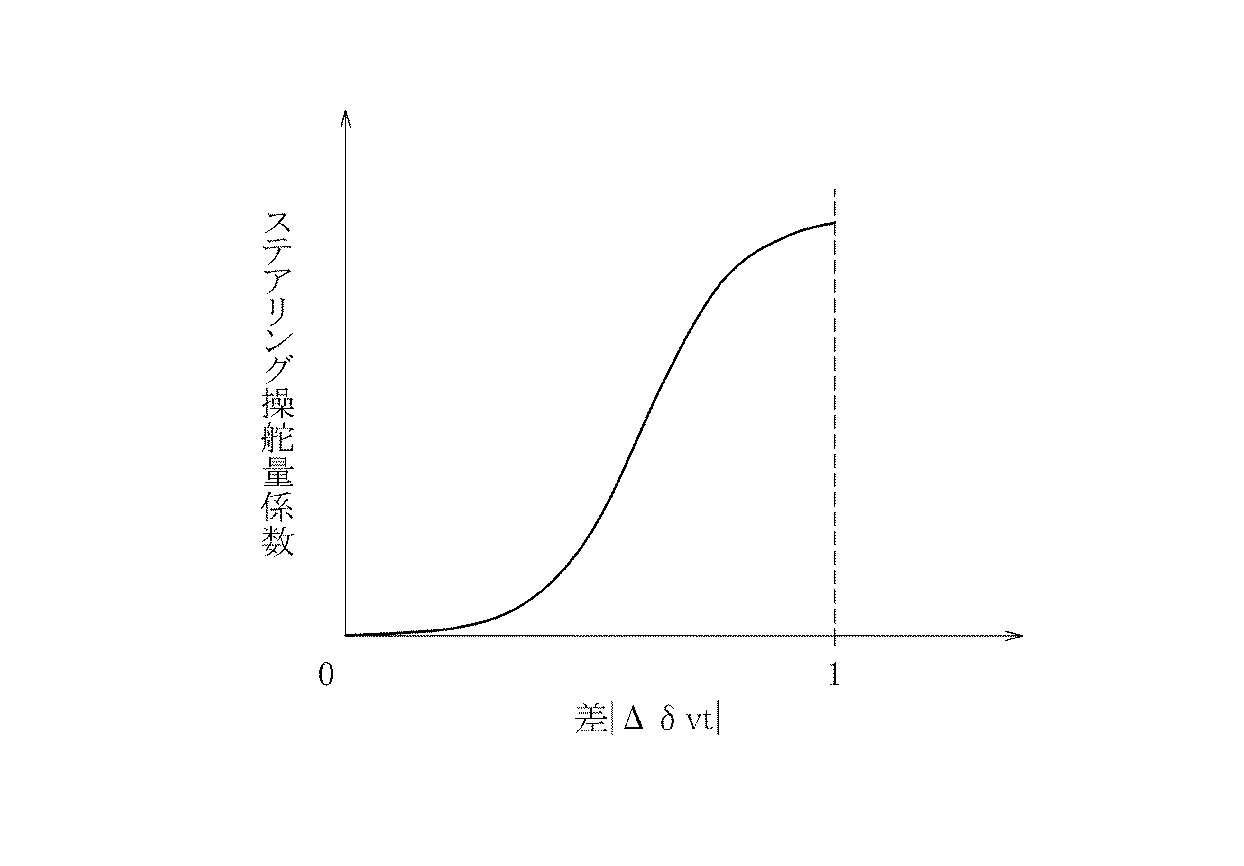
本発明の第2の態様の運転シミュレーション装置によれば、変換曲線はロジスティック曲線なので、仮想車両のステアリングの遊びを実現することができる。ロジスティック曲線は、当初は変化量が小さく、中途では変化量が大きくなり、その後変化量が小さくなる曲線であり、変曲点を中心に点対称に表される。仮想車両のステアリング舵角の割合と操作角度の割合との差に対する仮想車両の操舵量の関係をロジスティック曲線で表すと、その差が小さいほど操舵量の変化が小さく、その差が大きくなるにつれて操舵量の変化が大きくなり、その後再び操舵量の変化が小さくなるので、現実の車両におけるステアリングの挙動に極めて近似することになる。これにより、よりリアリティのある運転シミュレーションを実現することができる。 According to the driving simulation apparatus of the second aspect of the present invention, since the conversion curve is a logistic curve, play of the steering of the virtual vehicle can be realized. The logistic curve is a curve having a small amount of change at the beginning, a large amount of change in the middle, and a small amount of change after that, and is expressed symmetrically around the inflection point. When the relationship between the steering angle ratio of the virtual vehicle and the steering angle ratio of the virtual vehicle is expressed by a logistic curve, the change in the steering amount is smaller as the difference is smaller, and the steering is performed as the difference increases. Since the change in the amount becomes large and then the change in the steering amount becomes small again, it is very close to the steering behavior in an actual vehicle. Thereby, a more realistic driving simulation can be realized.
本発明の第3の態様の運転シミュレーション装置は、上述した第1の態様または第2の態様において、前記仮想車両の操舵量を演算する手段は、前記仮想車両のステアリングの応答性を決定する補正係数に基づいて、演算した操舵量をさらに補正する手段を含む、ことを特徴とする。 In the driving simulation apparatus according to the third aspect of the present invention, in the first aspect or the second aspect described above, the means for calculating the steering amount of the virtual vehicle corrects the steering response of the virtual vehicle. A means for further correcting the calculated steering amount based on the coefficient is included.
本発明の第3の態様の運転シミュレーション装置によれば、プレイヤーの好みに応じたステアリング応答性で仮想車両のステアリング操舵を模擬することが可能となる。 According to the driving simulation apparatus of the third aspect of the present invention, it is possible to simulate steering steering of a virtual vehicle with steering responsiveness according to a player's preference.
本発明の第4の態様の運転シミュレーション装置は、上述した第1の態様乃至第3の態様のいずれかにおいて、前記ステアリング舵角を更新する手段は、前記操作角度の割合と前記仮想車両のステアリング舵角の割合との差が演算した操舵量より小さい場合、その演算した操舵量に代えて前記操作角度の割合と前記仮想車両のステアリング舵角の割合との差に基づいて、前記仮想車両のステアリング舵角を更新することを特徴とする。 In the driving simulation apparatus according to the fourth aspect of the present invention, in any one of the first to third aspects described above, the means for updating the steering angle is the ratio of the operation angle and the steering of the virtual vehicle. When the difference between the steering angle ratio and the calculated steering amount is smaller than the calculated steering amount, based on the difference between the operation angle ratio and the steering angle ratio of the virtual vehicle, instead of the calculated steering amount, The steering angle is updated.
本発明の第4の態様の運転シミュレーション装置によれば、演算したステアリング舵角の補正量が、プレイヤーが操作した操作角度に対応するステアリング舵角の変化量よりも大きくなってしまうことを防止することができる。 According to the driving simulation device of the fourth aspect of the present invention, the calculated steering rudder angle correction amount is prevented from becoming larger than the steering rudder angle change amount corresponding to the operation angle operated by the player. be able to.
本発明の第5の態様の運転シミュレーション装置は、サーバ装置と、慣性センサ及び表示部を有し、ネットワークを介して前記サーバ装置と通信する携帯端末装置と、を備え、前記携帯端末装置は、前記慣性センサの出力信号から前記携帯端末装置の操作角度を演算する手段と、前記サーバ装置から送信された動画を前記表示部に表示する手段と、を有し、前記サーバ装置は、仮想車両のステアリング舵角を記憶する手段と、前記仮想車両のステアリングの最大操舵角に対する前記仮想車両のステアリング舵角の割合と、前記携帯端末装置から送信される前記携帯端末装置の最大操作可能角度に対する前記携帯端末装置から送信される前記操作角度の割合との差に基づいて、前記仮想車両のステアリング舵角の割合と前記操作角度の割合との差に対する前記仮想車両の操舵量の関係を予め規定した変換曲線から前記仮想車両の操舵量を演算する手段と、その演算した操舵量に基づいて、記憶されている前記仮想車両のステアリング舵角を更新する手段と、更新された前記仮想車両のステアリング舵角を反映した動画を作成して前記携帯端末装置に送信する手段と、を有することを特徴とする。 A driving simulation apparatus according to a fifth aspect of the present invention includes a server device, an inertial sensor, and a mobile terminal device that communicates with the server device via a network, and the mobile terminal device includes: Means for calculating an operation angle of the mobile terminal device from an output signal of the inertial sensor, and means for displaying a moving image transmitted from the server device on the display unit. Means for storing a steering rudder angle; a ratio of a steering rudder angle of the virtual vehicle to a maximum steering angle of the steering of the virtual vehicle; and the portable with respect to a maximum operable angle of the portable terminal device transmitted from the portable terminal device. Based on the difference with the ratio of the operation angle transmitted from the terminal device, the ratio of the steering angle of the virtual vehicle and the ratio of the operation angle The means for calculating the steering amount of the virtual vehicle from a conversion curve that predefines the relationship of the steering amount of the virtual vehicle to the vehicle, and the stored steering angle of the virtual vehicle is updated based on the calculated steering amount And means for creating a moving image reflecting the updated steering angle of the virtual vehicle and transmitting the moving image to the portable terminal device.
本発明の第5の態様の運転シミュレーション装置によれば、上述した第1の態様と同様に、よりリアリティのある運転シミュレーションを実現することができる。 According to the driving simulation apparatus of the fifth aspect of the present invention, a more realistic driving simulation can be realized as in the first aspect described above.
本発明の第6の態様の運転シミュレーションプログラムは、表示部及び慣性センサを有する携帯端末装置のコンピュータに実行させる運転シミュレーションプログラムであって、仮想車両のステアリング舵角を記憶する手段と、前記慣性センサの出力信号から操作角度を演算する手段と、前記仮想車両のステアリングの最大操舵角に対する前記仮想車両のステアリング舵角の割合と、最大操作可能角度に対する前記携帯端末装置から送信される前記操作角度の割合との差に基づいて、前記仮想車両のステアリング舵角の割合と前記操作角度の割合との差に対する前記仮想車両の操舵量の関係を予め規定した変換曲線から前記仮想車両の操舵量を演算する手段と、その演算した操舵量に基づいて、前記ステアリング舵角記憶手段に記憶されている前記仮想車両のステアリング舵角を更新する手段と、更新された前記仮想車両のステアリング舵角を反映した動画を作成して前記表示部に表示する手段と、を含むことを特徴とする。 A driving simulation program according to a sixth aspect of the present invention is a driving simulation program to be executed by a computer of a portable terminal device having a display unit and an inertial sensor, the means storing a steering angle of a virtual vehicle, and the inertial sensor Means for calculating an operation angle from the output signal, a ratio of the steering angle of the virtual vehicle to the maximum steering angle of the steering of the virtual vehicle, and the operation angle transmitted from the portable terminal device with respect to the maximum operable angle. Based on the difference with the ratio, the steering amount of the virtual vehicle is calculated from a conversion curve that predefines the relationship of the steering amount of the virtual vehicle with respect to the difference between the steering angle ratio and the operation angle ratio of the virtual vehicle. On the basis of the calculated steering amount and the steering angle storage means. It said means for updating the steering angle of the virtual vehicle, and create a video that reflects the steering angle of the updated the virtual vehicle, characterized in that it comprises, means for displaying on the display unit.
本発明の第6の態様の運転シミュレーションプログラムによれば、上述した第1の態様の運転シミュレーション装置と同様に、よりリアリティのある運転シミュレーションを実現することができる。 According to the driving simulation program of the sixth aspect of the present invention, a more realistic driving simulation can be realized in the same manner as the driving simulation apparatus of the first aspect described above.
本発明の第7の態様の運転シミュレーションプログラムは、サーバ装置と、ネットワークを介して前記サーバ装置と通信する携帯端末装置とを備えるネットワークシステムにおける前記サーバ装置のコンピュータに実行させる運転シミュレーションプログラムであって、仮想車両のステアリング舵角を記憶する手段と、前記仮想車両のステアリングの最大操舵角に対する前記仮想車両のステアリング舵角の割合と、前記携帯端末装置から送信される前記携帯端末装置の最大操作可能角度に対する前記携帯端末装置から送信される前記携帯端末装置の操作角度の割合との差に基づいて、前記仮想車両のステアリング舵角の割合と前記操作角度の割合との差に対する前記仮想車両の操舵量の関係を予め規定した変換曲線から前記仮想車両の操舵量を演算する手段と、その演算した操舵量に基づいて、前記ステアリング舵角記憶手段に記憶されている前記仮想車両のステアリング舵角を更新する手段と、更新された前記仮想車両のステアリング舵角を反映した動画を作成して前記携帯端末装置に送信する手段と、を含むことを特徴とする。 A driving simulation program according to a seventh aspect of the present invention is a driving simulation program to be executed by a computer of the server device in a network system including a server device and a mobile terminal device that communicates with the server device via a network. , Means for storing the steering angle of the virtual vehicle, the ratio of the steering angle of the virtual vehicle to the maximum steering angle of the virtual vehicle, and the maximum operation of the portable terminal device transmitted from the portable terminal device Steering of the virtual vehicle relative to the difference between the ratio of the steering angle of the virtual vehicle and the ratio of the operation angle based on the difference between the ratio of the operation angle of the mobile terminal device transmitted from the mobile terminal device to the angle The steering amount of the virtual vehicle from a conversion curve that prescribes the relationship between the amounts Based on the calculated steering amount, the means for updating the steering angle of the virtual vehicle stored in the steering angle storage means, and the updated steering angle of the virtual vehicle are reflected based on the calculated steering amount. And a means for creating the transmitted moving image and transmitting it to the mobile terminal device.
本発明の第7の態様の運転シミュレーションプログラムによれば、上述した第1の態様の運転シミュレーション装置と同様に、よりリアリティのある運転シミュレーションを実現することができる。 According to the driving simulation program of the seventh aspect of the present invention, a more realistic driving simulation can be realized in the same manner as the driving simulation apparatus of the first aspect described above.
本発明に係る運転シミュレーション装置によれば、よりリアリティのある運転シミュレーションを実現することができる。 According to the driving simulation device of the present invention, a more realistic driving simulation can be realized.
<第1実施形態>
以下、本発明の第1実施形態について図面を参照しながら説明する。図1は、本発明の第1実施形態に係る運転シミュレーション装置1の概略構成を示すブロック図、図2(A)は、モバイル端末に内蔵されている加速度センサのX軸、Y軸を示す図、図2(B)は、モバイル端末に内蔵されている加速度センサのZ軸を示す図、図3は、運転シミュレーション装置1に表示される動画の一例を示す図である。
<First Embodiment>
Hereinafter, a first embodiment of the present invention will be described with reference to the drawings. FIG. 1 is a block diagram showing a schematic configuration of a
運転シミュレーション装置1は、加速度センサ(慣性センサ)10、表示部11、演算部(制御部)12、及び記憶部13を備えている。運転シミュレーション装置1は、スマートフォンやタブレット端末等のモバイル端末であり、後述するプログラムをインストールして実行可能な携帯型の端末装置である。
The
加速度センサ10は、運転シミュレーション装置1において互いに直交するX軸、Y軸、Z軸の3軸方向の加速度を検出する。加速度センサ10が、X軸、Y軸、Z軸の加速度を検出することによって、各軸の加速及び減速を認識可能となる。特に、加速度センサ10が地球中心に作用する重力加速度を検出することにより、モバイル端末と地球との関係を定義することが可能になる。従って、加速度センサ10が、X軸、Y軸、Z軸のそれぞれの加速度を検出することによって、運転シミュレーション装置1の傾き、つまりモバイル端末の傾斜角を取得可能となる。
The
ここで、加速度センサ10が検出するX軸とは、運転シミュレーション装置1の長手方向の略中央を水平方向に延びる軸である。加速度センサ10が検出するY軸とは、X軸と直交し、運転シミュレーション装置1の幅方向の略中央を鉛直方向に延びる軸である。加速度センサ10が検出するZ軸とは、X軸及びY軸と直交し、運転シミュレーション装置1の背面14から表示部11が配置されている面に向かって延びる軸である。なお、本実施形態では、プレイヤーはY軸方向を鉛直方向上側として操作するものとする。
Here, the X axis detected by the
表示部11には、図3に示すように、3次元の仮想空間に仮想車両100の運転状態を描画した動画が再生される。表示部11に表示される動画には、プレイヤーが仮想車両100の運転席から見た仮想空間に加えて、ステアリングホイール101、バックミラー102、サイドミラー103が画像として表示される。仮想車両100の運転状態に応じて、仮想車両100の運転席から見た前方の景色だけでなく、バックミラー102、サイドミラー103に映し出される景色も変化させることによって、よりリアリティのある運転シミュレーションを実現することができる。プレイヤーは、運転シミュレーション装置1を傾けることによって、仮想車両100のステアリングホイール101を操作することができる。
As shown in FIG. 3, a moving image in which the driving state of the
演算部12は、操作角度演算部120、操舵量演算部121、ステアリング舵角更新部122、動画作成部123、及びタイマ124を有している。演算部12は、図示しないCPUから構成されており、記憶部13に記憶された図示しないプログラムをCPUが実行することによって、操作角度演算部120、操舵量演算部121等の各機能が発揮される。なお、演算部12は、操作角度演算部120、操舵量演算部121、ステアリング舵角更新部122、動画作成部123、及びタイマ124以外の機能も備えているが、本実施形態では説明を省略する。
The
操作角度演算部120は、加速度センサ10が検出した加速度から、運転シミュレーション装置1の傾斜角を操作角度として演算する。操舵量演算部121は、仮想車両100のステアリング舵角と、操作角度演算部120で演算された操作角度とに基づいて、仮想車両100のステアリングの操舵量を演算する。ステアリング舵角更新部122は、操舵量演算部121で演算した操舵量に基づいて、仮想車両100のステアリング舵角を更新する。動画作成部123は、更新されたステアリング舵角を反映した動画を作成し、表示部11で再生する。タイマ124は、前回ステアリング舵角θvが更新されてからの経過時間Δtを計測する。
The operation
記憶部13は、ステアリング舵角記憶部130と、曲線情報記憶部131とを有している。記憶部13は、ROM、RAM等のメモリから構成されている。記憶部13に記憶されている、図示しない各種プログラムは、ハードディスク、光ディスク、メモリカード等の記憶媒体(図示せず)に記憶されていたものであって、例えばこの記憶媒体から記憶部13にプログラムが供給されてもよい。また、インターネット等のネットワークを介して、各種プログラムが記憶部13に供給されてもよい。なお、記憶部13には、ステアリング舵角記憶部130、曲線情報記憶部131以外の情報も記憶しているが、本実施形態では説明を省略する。
The
ステアリング舵角記憶部130は、仮想車両100のステアリング舵角を記憶する。曲線情報記憶部131には、仮想車両100のステアリングの操舵量を求めるための変換曲線の情報が記憶されている。本実施形態では、変換曲線としてロジスティック曲線の情報が記憶されている。
The steering
次に、このように構成された運転シミュレーション装置1で実行される運転シミュレーションについて説明する。図4は本実施形態に係る運転シミュレーションルーチンのフローチャート、図5は図4に示す運転シミュレーションルーチンのステアリング舵角演算ステップのフローチャート、図6はロジスティック曲線の一例を示す図である。以下、図4〜図6に基づいて説明する。なお、以下に述べる運転シミュレーションルーチンのフローチャートにおける各ステップは、記憶部13に格納されている各種プログラムを演算部12で実行することによって行われる。また、以下に説明する各変数は、特に説明のない限り運転シミュレーション開始時に初期化(例えば0が設定)されているものとする。また、図4の運転シミュレーションルーチンを実行することによって、運転シミュレーションが開始される。また、以下に説明する運転シミュレーションルーチンのフローチャートでは、運転シミュレーション装置1をモバイル端末1として説明する。
Next, the driving simulation executed by the driving
ステップS1では、運転シミュレーション装置1、即ちモバイル端末1の操作角度θtyを更新する。詳しくは、ステアリング舵角記憶部130に仮想車両100のステアリング舵角θvを記憶し、加速度センサ10が検出した加速度に基づいて、モバイル端末1の傾斜角度を操作角度θtyとして演算する。ここで、加速度センサ10が検出した3軸方向の加速度から求まるY軸周りの傾斜角度を操作角度θtyとして演算する。
In step S1, the operation angle θty of the driving
ステップS2では、更新された仮想車両100のステアリング舵角θv’を演算する。詳しくは、図5に示すフローチャートに基づいて説明する。
In step S2, the updated steering angle θv ′ of the
ステップS21では、ステップS1で演算したモバイル端末1の操作角度θtyと、ステアリング舵角記憶部130に記憶されている仮想車両100のステアリング舵角θvとの差Δδvtを演算する。詳しくは、仮想車両100のステアリング舵角として操作可能な最大角度θvmaxに対するステアリング舵角θvの割合と、モバイル端末1の傾斜角の最大値θtmaxに対する操作角度θtyの割合との差Δδvtを以下の式(1)から演算する。
In step S21, a difference Δδvt between the operation angle θty of the
ここでモバイル端末の傾斜角の最大値θtmaxとは、プレイヤーが、モバイル端末1をY軸に対して傾けたときに表示部11を見ることの可能な角度であり、例えばπ/4(=45°)である。仮想車両100のステアリング舵角として操作可能な最大角度θvmaxは、例えばπ(=180°)である。それぞれの割合の差Δδvtを演算することによって、仮想車両100のステアリング舵角θvに対するモバイル端末1の操作角度θtyの変化量が求められる。
Here, the maximum tilt angle θtmax of the mobile terminal is an angle at which the player can see the
つまり、プレイヤーが操作しているモバイル端末1の操作角度θtyと、仮想車両100のステアリング舵角θvとが相対的に一致している場合には、ステアリング舵角θvの割合と操作角度θtyの割合との間に差は生じない。一方、プレイヤーが操作しているモバイル端末1の操作角度θtyと、仮想車両100のステアリング舵角θvとが相対的に不一致である場合には、ステアリング舵角θvの割合と操作角度θtyの割合との間に差が生じる。従って経過時間Δtにおける両者の差Δδvtを演算することによって、仮想車両100のステアリング舵角θvに対するモバイル端末1の操作角度θtyの変化量が求められる。
That is, when the operation angle θty of the
ステップS22では、ステップS21で演算した差Δδvtの絶対値が0か否かを判定する。当該判定結果が真(Yes)の場合には、モバイル端末1の傾斜角に変化がないとして、本フローチャートを終了する。一方、当該判定結果が偽(No)の場合には、モバイル端末1の傾斜角に変化があったとして、ステップS23へ進む。
In step S22, it is determined whether or not the absolute value of the difference Δδvt calculated in step S21 is zero. If the determination result is true (Yes), it is determined that there is no change in the tilt angle of the
ステップS23では、変換曲線における仮想車両100のステアリングの操舵量係数δvを求める。本実施形態では変換曲線として、図6に示すロジスティック曲線を用いる。このロジスティック曲線では、ステップS21で演算した差Δδvtの絶対値に対して操舵量係数δvが滑らかに変化する。詳しくは、差Δδvtの絶対値に対する操舵量係数δvの関係をロジスティック曲線で表すと、差Δδvtが小さいと操舵量係数δvの変化は小さく、差Δδvtが大きくなるにつれて操舵量係数δvの変化が大きくなり、その後再び操舵量係数δvの変化が小さくなる。例えば、差Δδvtが小さい場合には操舵量係数δvの変化が相対的に小さいので、微小操作時の過敏な反応を抑えることが可能となり、現実の車両のステアリングの挙動に近似させることができ、仮想車両100のステアリングホイール101の遊びを再現することができる。なお変換曲線は、S字曲線であればロジスティック曲線に限られない。
In step S23, the steering amount coefficient δv of the steering of the
ステップS24では、ステップS23で求めた操舵量係数δvから、前回仮想車両100のステアリング舵角θvを更新してからの経過時間Δtにおけるステアリングの操舵量Δδvを演算する。操舵量Δδvは、以下に示す式(2)から演算される。なお、経過時間Δtは、タイマ124によって計測されている。
Δδv=δv・Δt ・・・(2)
In step S24, the steering amount Δδv of the steering at the elapsed time Δt from the last update of the steering angle θv of the
Δδv = δv · Δt (2)
ステップS25では、ステアリングの応答性を示す補正係数cで、ステアリングの操舵量Δδvを補正する。補正後の操舵量Δδv’は、以下に示す式(3)から演算される。 In step S25, the steering amount Δδv of the steering is corrected with a correction coefficient c indicating the steering response. The corrected steering amount Δδv ′ is calculated from the following equation (3).
式(3)において、例えば補正係数cを大きくするとステアリングホイール101の応答性が鈍くなる、つまり仮想車両100のステアリングホイール101の操舵量よりも舵角θvが小さく変化する。他方、補正係数cを小さくするとステアリングホイール101の応答性が鋭くなる、つまり仮想車両100のステアリングホイール101の操舵量よりも舵角θvが大きく変化する。この補正係数cを変化させることによって、プレイヤーの好みに合わせたステアリングホイール101の応答性にすることが可能となる。
In equation (3), for example, when the correction coefficient c is increased, the response of the
ステップS26では、ステップS21で演算した差Δδvtと、ステップS25で演算した操舵量Δδv’とのうち、小さい方を選択し、変化量dxに格納する。変化量dxは、以下の式(4)から求められる。
dx=min(Δδv’,Δδvt) ・・・(4)
In step S26, the smaller one of the difference Δδvt calculated in step S21 and the steering amount Δδv ′ calculated in step S25 is selected and stored in the change amount dx. The amount of change dx is obtained from the following equation (4).
dx = min (Δδv ′, Δδvt) (4)
式(4)の関数minは、括弧内の変数のうち小さい値を選択する関数である。ステップS25で演算した操舵量Δδvは、ロジスティック曲線から求めた操舵量係数δvや、経過時間Δt及び補正係数cによる補正より、実際の操舵量よりも大きくなってしまうことがある。これを防止するために、式(4)で差Δδvtと変化量Δδv’とのうちいずれか小さい方を選択する。 The function min in Expression (4) is a function that selects a small value among the variables in parentheses. The steering amount Δδv calculated in step S25 may be larger than the actual steering amount due to the steering amount coefficient δv obtained from the logistic curve and the correction by the elapsed time Δt and the correction coefficient c. In order to prevent this, the smaller one of the difference Δδvt and the change amount Δδv ′ is selected in Equation (4).
ステップS27では、ステップS26で演算した変化量dxに応じて、仮想車両100のステアリング舵角θvを更新する。更新されたステアリング舵角θv’は、以下の式(5)から演算される。
θv’=θv+dx・θvmax ・・・(5)
In step S27, the steering angle θv of the
θv ′ = θv + dx · θvmax (5)
ステップS3では、更新されたステアリング舵角θv’を反映した仮想車両100の運転状態の動画を作成し、再生して表示部11に表示する。
ステップS4では、運転シミュレーションが終了されているか否かを判定する。当該判定結果が真(Yes)の場合には、運転シミュレーションを終了するために本フローチャートを終了する。一方、当該判定結果が偽(No)の場合には、運転シミュレーションを継続するとしてステップS1に戻る。なお、運転シミュレーションの終了は、例えば表示部11に設けられた終了ボタンや、モバイル端末1に設けられているボタン等が操作されることによる指令信号によって判定するようにしてもよい。
In step S <b> 3, a moving image of the driving state of the
In step S4, it is determined whether or not the driving simulation has been completed. When the determination result is true (Yes), this flowchart is ended to end the driving simulation. On the other hand, when the determination result is false (No), the operation simulation is continued and the process returns to step S1. The end of the driving simulation may be determined by a command signal generated by operating an end button provided on the
このように、本実施形態では、仮想車両100のステアリング舵角の最大値θvmaxに対するステアリング舵角θvの割合と、モバイル端末1の操作角度の最大値θtmaxに対する操作角度θtyの割合との差Δδvtに基づいて、その差Δδvtに対する仮想車両100のステアリングの操舵量係数δvとの関係を設定した変換曲線から操舵量Δδvを求め、その求めた操舵量Δδvに基づいてステアリング舵角θvを更新することにより、更新されたステアリング舵角θv’を演算する。
As described above, in this embodiment, the difference Δδvt between the ratio of the steering angle θv to the maximum steering angle θvmax of the
このようにして変換曲線から求めたステアリングの操舵量Δδvに基づいて、仮想車両のステアリング舵角θvを更新することによって、よりリアリティのある運転シミュレーションを実現することができる。 By updating the steering angle θv of the virtual vehicle based on the steering amount Δδv obtained from the conversion curve in this way, a more realistic driving simulation can be realized.
<第2実施形態>
次に、本発明に係る第2実施形態について説明する。本実施形態は、上記第1実施形態に対して、サーバ装置を設け、モバイル端末はネットワークを介してサーバ装置に接続する点が異なっており、その他の構成については共通している。従って共通箇所の説明は省略し、相違点のみ説明する。
Second Embodiment
Next, a second embodiment according to the present invention will be described. The present embodiment is different from the first embodiment in that a server device is provided, the mobile terminal is connected to the server device via a network, and other configurations are common. Therefore, description of common parts is omitted, and only differences are described.
図7は、本発明の第2実施形態に係る運転シミュレーション装置1Aの概略図である。図8は、本発明の第2実施形態に係る運転シミュレーション装置1Aの概略構成を示すブロック図である。以下、図7、図8に基づいて説明する。
FIG. 7 is a schematic diagram of a driving
本発明の第2実施形態に係る運転シミュレーション装置1Aは、サーバ装置2及びモバイル端末3を備えている。モバイル端末3は、ネットワークNを介してサーバ装置2に接続する。
A driving
図8に示すように、サーバ装置2は、演算部20、記憶部21、及びサーバ通信部22を備えている。演算部20は、操舵量演算部200、ステアリング舵角更新部201、動画作成部202、及びタイマ203を有している。演算部20はCPUから構成されており、記憶部21に記憶されたプログラムを図示しないCPUが実行することによって、操舵量演算部200、ステアリング舵角更新部201、動画作成部202、タイマ203の各機能が発揮される。なお、演算部20は、操舵量演算部200、ステアリング舵角更新部201、動画作成部202及びタイマ203以外の機能も備えているが、本実施形態では説明を省略する。
As illustrated in FIG. 8, the
操舵量演算部200は、仮想車両100のステアリング舵角と、モバイル端末3の操作角度演算部310で演算された操作角度との差に基づいて、仮想車両100のステアリングの操舵量を演算する。ステアリング舵角更新部201は、操舵量演算部200で演算したステアリングの操舵量に基づいて、仮想車両100のステアリング舵角を更新する。動画作成部202は、更新されたステアリング舵角を反映した動画を作成する。タイマ203は、前回ステアリング舵角が更新されてからの経過時間Δtを計測する。
The steering
記憶部21は、ROM、RAM等のメモリから構成されている。記憶部21は、ステアリング舵角記憶部210と、曲線情報記憶部211とを有している。ステアリング舵角記憶部210は、仮想車両100のステアリング舵角を記憶する。曲線情報記憶部211には、ステアリングの操舵量を求めるための変換曲線が記憶されている。
The
サーバ通信部22は、ネットワークNを介してモバイル端末3と通信を行うものであり、サーバ装置2で演算した仮想車両100のステアリング舵角のモバイル端末3への送信や、モバイル端末3から送信された操作角度の受信等を行う。
The
モバイル端末3は、持ち運び可能な携帯端末装置であり、端末通信部30、演算部(制御部)31、加速度センサ(慣性センサ)32、及び表示部33を備えている。
端末通信部30は、ネットワークNを介してサーバ装置2と通信を行うものである。
The
The
演算部31は、操作角度演算部310と、動画再生部311とを有している。演算部31はCPUから構成されており、図示しないROM、RAM等のメモリに記憶されたプログラムをCPUが実行することによって、操作角度演算部310、動画再生部311の各機能が発揮される。なお、演算部31は、操作角度演算部310、動画再生部311以外の機能も備えているが、本実施形態では説明を省略する。
The
操作角度演算部310は、加速度センサ32が検出した3軸方向の加速度に基づいて、モバイル端末3の傾斜角を演算する。
動画再生部311は、サーバ装置2から送信された仮想車両100のステアリング舵角を反映した仮想車両100の動画を作成し、表示部33に表示する。
The operation
The moving
このように構成された運転シミュレーション装置1Aで実行される運転シミュレーションについて説明する。図9は、本実施形態に係る運転シミュレーションルーチンのサーバ装置2の演算部20で行われるフローチャート、図10は、図9の運転シミュレーションルーチンの仮想車両のステアリング舵角演算ステップのフローチャートである。以下、図9、図10に基づいて説明する。なお、以下に述べる運転シミュレーションルーチンのフローチャートにおける各ステップは、サーバ装置2の記憶部21に格納されている各種プログラムを演算部20で実行することによって行われる。また、図9に示すフローチャートは、サーバ装置2がモバイル端末3から運転シミュレーションの開始要求を受信することにより行われる。また、後述するステップS34の詳細なステップS342〜S347は、上記第1実施形態で説明した図5のステップS22〜S27と同じであり、本実施形態では図5の各ステップをサーバ装置2の演算部20で行うところが異なっていることから、共通する部分の説明は省略する。
A driving simulation executed by the driving
ステップS31では、モバイル端末3に操作角度θtyを要求する。モバイル端末3は、サーバ装置2から操作角度θtyの要求を受信すると、加速度センサ32が検出した3軸方向の加速度から求まるY軸回りの傾斜角度を操作角度θtyとして演算し、サーバ装置2へ送信する。
In step S31, the
ステップS32では、モバイル端末3からの応答の有無を判定する。当該判定結果が真(Yes)の場合には、モバイル端末3から操作角度θtyを受信したとしてステップS33へ進む。一方、当該判定結果が偽(No)の場合には、モバイル端末3から操作角度θtyを受信できなかったとしてステップS34へ進む。
In step S32, it is determined whether or not there is a response from the
ステップS33では、ステップS32で受信したモバイル端末3の操作角度θtyで、変数としての操作角度θtyを更新する。
ステップS34では、モバイル端末3の操作角度θtyに基づいて、更新した仮想車両100のステアリング舵角θv’を演算する。ここで、ステップS32でモバイル端末3から操作角度θtyを受信できなかった場合、前回受信した操作角度θtyに基づいて更新したステアリング舵角θv’を演算する。ステップS34の詳細は、図10に基づいて説明する。
In step S33, the operation angle θty as a variable is updated with the operation angle θty of the
In step S34, the updated steering angle θv ′ of the
ステップS341では、モバイル端末1の操作角度θtyとステアリング舵角記憶部210に記憶されている仮想車両100のステアリング舵角θvとの差Δδvtを演算する。詳しくは、仮想車両100のステアリング舵角として操作可能な最大角度θvmaxに対するステアリング舵角θvの割合と、モバイル端末1から受信したモバイル端末1の傾斜角の最大値θtmaxに対する操作角度θtyの割合との差Δδvtを上述した式(1)から演算する。
In step S341, a difference Δδvt between the operation angle θty of the
ステップS342では、ステップS341で演算した差Δδvtの絶対値が0か否かを判定する。当該判定結果が真(Yes)の場合には、モバイル端末1の傾斜角に変化がないとして、本フローチャートを終了する。一方、当該判定結果が偽(No)の場合には、モバイル端末1の傾斜角に変化があったとして、ステップS343へ進む。
In step S342, it is determined whether or not the absolute value of the difference Δδvt calculated in step S341 is zero. If the determination result is true (Yes), it is determined that there is no change in the tilt angle of the
ステップS343では、変換曲線における仮想車両100のステアリングの操舵量係数δvを求める。
ステップS344では、前回仮想車両100のステアリング舵角θvを更新してからの経過時間Δtにおける操舵量Δδvを演算する。操舵量Δδvは、上述した式(2)から演算される。
In step S343, the steering amount coefficient δv of the steering of the
In step S344, a steering amount Δδv at an elapsed time Δt since the steering angle θv of the
ステップS345では、ステアリングの応答性を示す補正係数cで、ステアリングの操舵量Δδvを補正する。補正後の操舵量Δδv’は、上述した式(3)から演算される。 In step S345, the steering amount Δδv of the steering is corrected with the correction coefficient c indicating the steering response. The corrected steering amount Δδv ′ is calculated from the above equation (3).
ステップS346では、ステップS341で演算した差Δδvtと、ステップS345で演算した補正後の操舵量Δδv’とのうち、小さい方を選択し、変化量dxに格納する。変化量dxは、上述した式(4)から求められる。 In step S346, the smaller one of the difference Δδvt calculated in step S341 and the corrected steering amount Δδv ′ calculated in step S345 is selected and stored in the change amount dx. The change amount dx is obtained from the above-described equation (4).
ステップS347では、ステップS346で演算した変化量dxに応じて、仮想車両100のステアリング舵角θvを更新する。更新したステアリング舵角θv’は、上述した式(5)から演算される。
In step S347, the steering angle θv of the
ステップS35では、更新したステアリング舵角θv’を反映した仮想車両100の動画を作成し、モバイル端末3に送信する。なお、ステップS342で偽(No)と判定された場合には、モバイル端末1の傾斜角度に変化がないので、更新前のステアリング舵角θvを反映した仮想車両100の動画を作成する。モバイル端末3は、サーバ装置2から動画を受信した後、その動画を再生して表示部33に表示する。
In step S <b> 35, a moving image of the
ステップS36では、運転シミュレーションを終了するか否かを判定する。当該判定結果が真(Yes)の場合には、運転シミュレーションを終了する。一方、当該判定結果が偽(No)の場合には、運転シミュレーションを継続するためにステップS31へ戻る。なお、運転シミュレーションの終了は、例えばモバイル端末3から運転シミュレーション終了の指令信号をサーバ装置2で受信したか否かで判定してもよい。
In step S36, it is determined whether or not to end the driving simulation. If the determination result is true (Yes), the driving simulation is terminated. On the other hand, if the determination result is false (No), the process returns to step S31 to continue the driving simulation. The end of the driving simulation may be determined based on, for example, whether the
このように、本実施形態では、モバイル端末3の加速度センサ32で検出した加速度に基づいて演算した操作角度θtyから、操作角度の最大値θtmaxに対する操作角度θtyの割合と、ステアリング舵角の最大値θvmaxに対するステアリング舵角θvの割合との差を演算し、変換曲線から仮想車両100のステアリングの操舵量Δδvを求めて、更新したステアリング舵角θv’を演算する。これにより、上記第1実施形態と同様の効果が得られる。
As described above, in the present embodiment, the ratio of the operation angle θty to the maximum value θtmax of the operation angle and the maximum value of the steering angle from the operation angle θty calculated based on the acceleration detected by the
以上で実施形態の説明を終えるが、本発明は上述した実施形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲で種々の変更が可能である。
例えば、上記各実施形態では、モバイル端末1,3の3軸方向の加速度から求められるY軸回りの傾斜角度を操作角度θtyとして演算していたが、モバイル端末1,3の向きに応じて傾斜角度の軸は変更してもよい。例えば、プレイヤーがX軸を鉛直方向上側にしてモバイル端末1,3を操作する場合には、3軸方向の加速度から求まるX軸回りの傾斜角度を操作角度θtxとして演算するようにしてもよい。
Although the description of the embodiment has been completed above, the present invention is not limited to the above-described embodiment, and various modifications can be made without departing from the gist of the present invention.
For example, in each of the above embodiments, the tilt angle about the Y axis obtained from the accelerations in the three axis directions of the
また、上記各実施形態では、「慣性センサ」の一例である加速度センサ10,32によって検出したモバイル端末1,3の加速度からモバイル端末1,3の操作角度θtyを演算しているが、例えば「慣性センサ」の一例である角速度センサで検出したモバイル端末1の回転角度θtyを演算するようにしてもよい。
In each of the above embodiments, the operation angle θty of the
1,1A 運転シミュレーション装置
10,32 加速度センサ(慣性センサ)
11,33 表示部
12,20 演算部(制御部)
120,310 操作角度演算部
121,200 操舵量演算部
122,201 ステアリング舵角更新部
123,202 動画作成部
1,1A
11, 33
120, 310 Operation
Claims (7)
慣性センサと、
制御部と、を備え、
前記制御部は、仮想車両のステアリング舵角を記憶する手段と、
前記慣性センサの出力信号から操作角度を演算する手段と、
前記仮想車両のステアリングの最大操舵角に対する前記仮想車両のステアリング舵角の割合と、最大操作可能角度に対する前記操作角度の割合との差に基づいて、前記仮想車両のステアリング舵角の割合と前記操作角度の割合との差に対する前記仮想車両の操舵量の関係を予め規定した変換曲線から前記仮想車両の操舵量を演算する手段と、
その演算した操舵量に基づいて、記憶されている前記仮想車両のステアリング舵角を更新する手段と、
更新された前記仮想車両のステアリング舵角を反映した動画を作成して前記表示部に表示する動画表示手段と、
を備えることを特徴とする運転シミュレーション装置。 A display unit;
An inertial sensor;
A control unit,
The control unit stores a steering angle of the virtual vehicle;
Means for calculating an operation angle from an output signal of the inertial sensor;
Based on the difference between the ratio of the steering angle of the virtual vehicle to the maximum steering angle of the virtual vehicle and the ratio of the operation angle to the maximum operable angle, the ratio of the steering angle of the virtual vehicle and the operation Means for calculating a steering amount of the virtual vehicle from a conversion curve that predefines a relationship of the steering amount of the virtual vehicle with respect to a difference from an angle ratio;
Means for updating the stored steering angle of the virtual vehicle based on the calculated steering amount;
A moving image display means for generating a moving image reflecting the updated steering angle of the virtual vehicle and displaying the moving image on the display unit;
A driving simulation apparatus comprising:
慣性センサ及び表示部を有し、ネットワークを介して前記サーバ装置と通信する携帯端末装置と、を備え、
前記携帯端末装置は、前記慣性センサの出力信号から前記携帯端末装置の操作角度を演算する手段と、
演算した操作角度及び前記携帯端末装置の最大操作可能角度を前記サーバ装置へ送信する手段と、
前記サーバ装置から送信された動画を前記表示部に表示する手段と、を有し、
前記サーバ装置は、仮想車両のステアリング舵角を記憶する手段と、
前記仮想車両のステアリングの最大操舵角に対する前記仮想車両のステアリング舵角の割合と、前記携帯端末装置から送信される前記携帯端末装置の最大操作可能角度に対する前記携帯端末装置から送信される前記操作角度の割合との差に基づいて、前記仮想車両のステアリング舵角の割合と前記操作角度の割合との差に対する前記仮想車両の操舵量の関係を予め規定した変換曲線から前記仮想車両の操舵量を演算する手段と、
その演算した操舵量に基づいて、記憶されている前記仮想車両のステアリング舵角を更新する手段と、
更新された前記仮想車両のステアリング舵角を反映した動画を作成して前記携帯端末装置に送信する手段と、
を有することを特徴とする運転シミュレーション装置。 A server device;
A mobile terminal device having an inertial sensor and a display unit and communicating with the server device via a network;
The mobile terminal device calculates an operation angle of the mobile terminal device from an output signal of the inertial sensor;
Means for transmitting the calculated operation angle and the maximum operable angle of the mobile terminal device to the server device;
Means for displaying the moving image transmitted from the server device on the display unit,
The server device stores a steering angle of a virtual vehicle;
The ratio of the steering angle of the virtual vehicle to the maximum steering angle of the steering of the virtual vehicle, and the operation angle transmitted from the portable terminal device to the maximum operable angle of the portable terminal device transmitted from the portable terminal device Based on the difference between the ratio of the steering angle of the virtual vehicle and the ratio of the steering angle of the virtual vehicle and the ratio of the steering angle of the virtual vehicle to the difference of the steering angle Means for calculating;
Means for updating the stored steering angle of the virtual vehicle based on the calculated steering amount;
Means for creating a moving image reflecting the updated steering angle of the virtual vehicle and transmitting it to the mobile terminal device;
A driving simulation apparatus comprising:
仮想車両のステアリング舵角を記憶する手段と、
前記慣性センサの出力信号から操作角度を演算する手段と、
前記仮想車両のステアリングの最大操舵角に対する前記仮想車両のステアリング舵角の割合と、最大操作可能角度に対する前記携帯端末装置から送信される前記操作角度の割合との差に基づいて、前記仮想車両のステアリング舵角の割合と前記操作角度の割合との差に対する前記仮想車両の操舵量の関係を予め規定した変換曲線から前記仮想車両の操舵量を演算する手段と、
その演算した操舵量に基づいて、前記ステアリング舵角を記憶する手段に記憶されている前記仮想車両のステアリング舵角を更新する手段と、
更新された前記仮想車両のステアリング舵角を反映した動画を作成して前記表示部に表示する手段として、前記携帯端末装置のコンピュータを機能させるための運転シミュレーションプログラム。 A driving simulation program to be executed by a computer of a mobile terminal device having a display unit and an inertial sensor,
Means for storing the steering angle of the virtual vehicle;
Means for calculating an operation angle from an output signal of the inertial sensor;
Based on the difference between the ratio of the steering angle of the virtual vehicle to the maximum steering angle of the steering of the virtual vehicle and the ratio of the operation angle transmitted from the portable terminal device to the maximum operable angle, Means for calculating the steering amount of the virtual vehicle from a conversion curve that predefines the relationship of the steering amount of the virtual vehicle with respect to the difference between the ratio of the steering angle and the ratio of the operation angle;
Means for updating the steering angle of the virtual vehicle stored in the means for storing the steering angle based on the calculated steering amount;
As a means for displaying on the display unit to create a video that reflects the steering angle of the updated the virtual vehicle, drive simulation program for causing a computer to function of the portable terminal device.
仮想車両のステアリング舵角を記憶する手段と、
前記仮想車両のステアリングの最大操舵角に対する前記仮想車両のステアリング舵角の割合と、前記携帯端末装置から送信される前記携帯端末装置の最大操作可能角度に対する前記携帯端末装置から送信される前記携帯端末装置の操作角度の割合との差に基づいて、前記仮想車両のステアリング舵角の割合と前記操作角度の割合との差に対する前記仮想車両の操舵量の関係を予め規定した変換曲線から前記仮想車両の操舵量を演算する手段と、
その演算した操舵量に基づいて、前記ステアリング舵角を記憶する手段に記憶されている前記仮想車両のステアリング舵角を更新する手段と、
更新された前記仮想車両のステアリング舵角を反映した動画を作成して前記携帯端末装置に送信する手段として、前記サーバ装置のコンピュータを機能させるための運転シミュレーションプログラム。 A driving simulation program to be executed by a computer of the server device in a network system including a server device and a mobile terminal device that communicates with the server device via a network,
Means for storing the steering angle of the virtual vehicle;
The ratio of the steering angle of the virtual vehicle to the maximum steering angle of the steering of the virtual vehicle and the portable terminal transmitted from the portable terminal device with respect to the maximum operable angle of the portable terminal device transmitted from the portable terminal device Based on a difference between the steering angle of the virtual vehicle and the ratio of the steering angle of the virtual vehicle and the ratio of the steering angle of the virtual vehicle based on a difference between the steering angle of the virtual vehicle and the virtual vehicle Means for calculating the steering amount of
Means for updating the steering angle of the virtual vehicle stored in the means for storing the steering angle based on the calculated steering amount;
As a means for transmitting to said portable terminal device to create a video that reflects the steering angle of the updated the virtual vehicle, drive simulation program for causing a computer to function of the server device.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013145512A JP5711312B2 (en) | 2013-07-11 | 2013-07-11 | Driving simulation apparatus and driving simulation program using portable terminal |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013145512A JP5711312B2 (en) | 2013-07-11 | 2013-07-11 | Driving simulation apparatus and driving simulation program using portable terminal |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015018110A JP2015018110A (en) | 2015-01-29 |
| JP5711312B2 true JP5711312B2 (en) | 2015-04-30 |
Family
ID=52439153
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013145512A Active JP5711312B2 (en) | 2013-07-11 | 2013-07-11 | Driving simulation apparatus and driving simulation program using portable terminal |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5711312B2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12515658B2 (en) * | 2022-11-18 | 2026-01-06 | Toyota Jidosha Kabushiki Kaisha | Moving body operation system |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4438927B2 (en) * | 2003-04-08 | 2010-03-24 | 株式会社バンダイナムコゲームス | Simulator, program and information storage medium |
| JP2008015679A (en) * | 2006-07-04 | 2008-01-24 | Sony Computer Entertainment Inc | User interface device and operational sensitivity adjustment method |
| JP5149426B2 (en) * | 2011-06-21 | 2013-02-20 | 株式会社フォーラムエイト | Driving simulation device, server device, and program |
| JP5816032B2 (en) * | 2011-09-09 | 2015-11-17 | 任天堂株式会社 | INPUT DEVICE, INPUT PROCESSING PROGRAM, INPUT PROCESSING METHOD, INPUT PROCESSING SYSTEM |
-
2013
- 2013-07-11 JP JP2013145512A patent/JP5711312B2/en active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12515658B2 (en) * | 2022-11-18 | 2026-01-06 | Toyota Jidosha Kabushiki Kaisha | Moving body operation system |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015018110A (en) | 2015-01-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5224832B2 (en) | Information processing program and information processing apparatus | |
| JP5265159B2 (en) | Program and game device | |
| US8797360B2 (en) | Image display device, method for controlling image display device, and information storage medium | |
| JP2008015679A (en) | User interface device and operational sensitivity adjustment method | |
| JP6976907B2 (en) | Programs, information processing devices, information processing systems and information processing methods | |
| JP4029102B2 (en) | Video game program, video game apparatus, and video game control method | |
| US9393494B2 (en) | Input device, computer-readable storage medium having input processing program stored therein, input processing method, and input processing system | |
| JP5718992B2 (en) | Driving simulation apparatus and driving simulation program using portable terminal | |
| JP5367954B2 (en) | GAME PROGRAM, GAME DEVICE, AND STORAGE MEDIUM | |
| JP5872137B2 (en) | Posture calculation apparatus, posture calculation program, posture calculation system, and posture calculation method | |
| JP7579371B2 (en) | Information processing program, information processing system, and information processing method | |
| JP5711312B2 (en) | Driving simulation apparatus and driving simulation program using portable terminal | |
| JP3947549B2 (en) | Video game program, video game apparatus, and video game control method | |
| JP7140465B2 (en) | Game program, information processing device, information processing system, game processing method | |
| JP4610971B2 (en) | Game program | |
| JP2024133289A (en) | GAME PROGRAM, GAME SYSTEM, GAME DEVICE, AND GAME METHOD | |
| JP4878240B2 (en) | Image display control device, image display method, and program | |
| JP4958835B2 (en) | Image display device, control method and program for image display device | |
| US8219347B2 (en) | Orientation calculation apparatus and storage medium having orientation calculation program stored therein | |
| JP2009259130A (en) | Image display device, method for controlling the image display device, and program | |
| JP4668839B2 (en) | Information processing apparatus, control method thereof, and program | |
| JP5377867B2 (en) | Program, information storage medium, and game system | |
| JP5143548B2 (en) | Program, information storage medium, and game device | |
| JP2009258523A (en) | Image display device, method for controlling image display device, and program | |
| JP4799269B2 (en) | Image processing apparatus and program |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141217 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150129 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150225 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150305 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5711312 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |