JP4977038B2 - Percutaneous spinal implant and method - Google Patents
Percutaneous spinal implant and method Download PDFInfo
- Publication number
- JP4977038B2 JP4977038B2 JP2007556308A JP2007556308A JP4977038B2 JP 4977038 B2 JP4977038 B2 JP 4977038B2 JP 2007556308 A JP2007556308 A JP 2007556308A JP 2007556308 A JP2007556308 A JP 2007556308A JP 4977038 B2 JP4977038 B2 JP 4977038B2
- Authority
- JP
- Japan
- Prior art keywords
- configuration
- implant
- spinous processes
- distal
- proximal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 369
- 239000007943 implant Substances 0.000 title description 463
- 230000008569 process Effects 0.000 claims description 346
- 230000013011 mating Effects 0.000 claims description 9
- 230000014759 maintenance of location Effects 0.000 description 69
- 239000000463 material Substances 0.000 description 35
- 238000003780 insertion Methods 0.000 description 29
- 230000037431 insertion Effects 0.000 description 29
- 239000012530 fluid Substances 0.000 description 26
- 210000001519 tissue Anatomy 0.000 description 26
- 125000006850 spacer group Chemical group 0.000 description 24
- 230000006835 compression Effects 0.000 description 18
- 238000007906 compression Methods 0.000 description 18
- 230000007704 transition Effects 0.000 description 17
- 210000000988 bone and bone Anatomy 0.000 description 14
- 239000004696 Poly ether ether ketone Substances 0.000 description 13
- 229920002530 polyetherether ketone Polymers 0.000 description 13
- 230000007246 mechanism Effects 0.000 description 11
- -1 for example Substances 0.000 description 8
- 210000000278 spinal cord Anatomy 0.000 description 8
- 229910001220 stainless steel Inorganic materials 0.000 description 7
- 239000010935 stainless steel Substances 0.000 description 7
- 229920000049 Carbon (fiber) Polymers 0.000 description 6
- 239000004698 Polyethylene Substances 0.000 description 6
- 239000000560 biocompatible material Substances 0.000 description 6
- 239000004917 carbon fiber Substances 0.000 description 6
- 238000010586 diagram Methods 0.000 description 6
- 210000003041 ligament Anatomy 0.000 description 6
- VNWKTOKETHGBQD-UHFFFAOYSA-N methane Chemical compound C VNWKTOKETHGBQD-UHFFFAOYSA-N 0.000 description 6
- 229920000573 polyethylene Polymers 0.000 description 6
- 208000005198 spinal stenosis Diseases 0.000 description 6
- 230000008878 coupling Effects 0.000 description 5
- 238000010168 coupling process Methods 0.000 description 5
- 238000005859 coupling reaction Methods 0.000 description 5
- 230000006870 function Effects 0.000 description 5
- 239000007788 liquid Substances 0.000 description 5
- 239000004033 plastic Substances 0.000 description 5
- 229920003023 plastic Polymers 0.000 description 5
- 0 C*1C2N(*)C2C1 Chemical compound C*1C2N(*)C2C1 0.000 description 4
- 239000000853 adhesive Substances 0.000 description 4
- 230000001070 adhesive effect Effects 0.000 description 4
- 238000013459 approach Methods 0.000 description 4
- 238000004146 energy storage Methods 0.000 description 4
- 240000006829 Ficus sundaica Species 0.000 description 3
- 229910001069 Ti alloy Inorganic materials 0.000 description 3
- 238000005452 bending Methods 0.000 description 3
- 230000008901 benefit Effects 0.000 description 3
- 229910052797 bismuth Inorganic materials 0.000 description 3
- JCXGWMGPZLAOME-UHFFFAOYSA-N bismuth atom Chemical compound [Bi] JCXGWMGPZLAOME-UHFFFAOYSA-N 0.000 description 3
- 230000008859 change Effects 0.000 description 3
- 238000004891 communication Methods 0.000 description 3
- 230000036407 pain Effects 0.000 description 3
- 239000002861 polymer material Substances 0.000 description 3
- 238000001356 surgical procedure Methods 0.000 description 3
- 238000003466 welding Methods 0.000 description 3
- 208000031481 Pathologic Constriction Diseases 0.000 description 2
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 2
- 239000000956 alloy Substances 0.000 description 2
- 239000011248 coating agent Substances 0.000 description 2
- 238000000576 coating method Methods 0.000 description 2
- 230000006837 decompression Effects 0.000 description 2
- 230000000717 retained effect Effects 0.000 description 2
- 230000036262 stenosis Effects 0.000 description 2
- 208000037804 stenosis Diseases 0.000 description 2
- BSYNRYMUTXBXSQ-UHFFFAOYSA-N Aspirin Chemical compound CC(=O)OC1=CC=CC=C1C(O)=O BSYNRYMUTXBXSQ-UHFFFAOYSA-N 0.000 description 1
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 1
- 206010029174 Nerve compression Diseases 0.000 description 1
- 239000004677 Nylon Substances 0.000 description 1
- 206010033799 Paralysis Diseases 0.000 description 1
- 208000007103 Spondylolisthesis Diseases 0.000 description 1
- 229960001138 acetylsalicylic acid Drugs 0.000 description 1
- 229910045601 alloy Inorganic materials 0.000 description 1
- 229920000249 biocompatible polymer Polymers 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 239000008280 blood Substances 0.000 description 1
- 210000004369 blood Anatomy 0.000 description 1
- 244000309466 calf Species 0.000 description 1
- 229910052799 carbon Inorganic materials 0.000 description 1
- 239000003795 chemical substances by application Substances 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 239000003246 corticosteroid Substances 0.000 description 1
- 229960001334 corticosteroids Drugs 0.000 description 1
- 229920003020 cross-linked polyethylene Polymers 0.000 description 1
- 239000004703 cross-linked polyethylene Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 238000002695 general anesthesia Methods 0.000 description 1
- 238000001727 in vivo Methods 0.000 description 1
- 230000003871 intestinal function Effects 0.000 description 1
- 238000002684 laminectomy Methods 0.000 description 1
- 238000002324 minimally invasive surgery Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 229940021182 non-steroidal anti-inflammatory drug Drugs 0.000 description 1
- 231100000862 numbness Toxicity 0.000 description 1
- 229920001778 nylon Polymers 0.000 description 1
- 238000000554 physical therapy Methods 0.000 description 1
- 239000002504 physiological saline solution Substances 0.000 description 1
- 229920000139 polyethylene terephthalate Polymers 0.000 description 1
- 239000005020 polyethylene terephthalate Substances 0.000 description 1
- 229920002635 polyurethane Polymers 0.000 description 1
- 239000004814 polyurethane Substances 0.000 description 1
- 229920000915 polyvinyl chloride Polymers 0.000 description 1
- 239000004800 polyvinyl chloride Substances 0.000 description 1
- 208000037821 progressive disease Diseases 0.000 description 1
- 230000000750 progressive effect Effects 0.000 description 1
- 239000000700 radioactive tracer Substances 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 230000035807 sensation Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 210000001032 spinal nerve Anatomy 0.000 description 1
- 210000000273 spinal nerve root Anatomy 0.000 description 1
- 150000003431 steroids Chemical class 0.000 description 1
- 229910000811 surgical stainless steel Inorganic materials 0.000 description 1
- 229910052719 titanium Inorganic materials 0.000 description 1
- 239000010936 titanium Substances 0.000 description 1
Images













































































































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/44—Joints for the spine, e.g. vertebrae, spinal discs
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/44—Joints for the spine, e.g. vertebrae, spinal discs
- A61F2/442—Intervertebral or spinal discs, e.g. resilient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/02—Surgical instruments, devices or methods for holding wounds open, e.g. retractors; Tractors
- A61B17/025—Joint distractors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws or setting implements
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/70—Spinal positioners or stabilisers, e.g. stabilisers comprising fluid filler in an implant
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws or setting implements
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/70—Spinal positioners or stabilisers, e.g. stabilisers comprising fluid filler in an implant
- A61B17/7062—Devices acting on, attached to, or simulating the effect of, vertebral processes, vertebral facets or ribs ; Tools for such devices
- A61B17/7065—Devices with changeable shape, e.g. collapsible or having retractable arms to aid implantation; Tools therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00535—Surgical instruments, devices or methods pneumatically or hydraulically operated
- A61B2017/00557—Surgical instruments, devices or methods pneumatically or hydraulically operated inflatable
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/02—Surgical instruments, devices or methods for holding wounds open, e.g. retractors; Tractors
- A61B17/025—Joint distractors
- A61B2017/0256—Joint distractors for the spine
Landscapes
- Health & Medical Sciences (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Neurology (AREA)
- General Health & Medical Sciences (AREA)
- Veterinary Medicine (AREA)
- Heart & Thoracic Surgery (AREA)
- Public Health (AREA)
- Animal Behavior & Ethology (AREA)
- Molecular Biology (AREA)
- Medical Informatics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Cardiology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Transplantation (AREA)
- Vascular Medicine (AREA)
- Prostheses (AREA)
- Surgical Instruments (AREA)
Description
関連出願への相互参照
この出願は、2005年2月17日に出願された米国特許出願第11/059,526号「脊椎状態を治療するための装置および方法」、2005年7月1日に出願された米国特許仮出願第60/695,836号「経皮的脊椎インプラントおよび方法」、2005年10月19日に出願された米国特許出願第11/252,879号「経皮的脊椎インプラントおよび方法」、および2005年10月19日に出願された米国特許出願第11/252,880号「経皮的脊椎インプラントおよび方法」の優先権を主張する。
Cross-reference to related applications This application is based on US patent application Ser. No. 11 / 059,526, filed Feb. 17, 2005, “Devices and Methods for Treating Spinal Conditions”, Jul. US Provisional Application No. 60 / 695,836 “Percutaneous Spinal Implants and Methods”, US Patent Application No. 11 / 252,879, filed Oct. 19, 2005, “Percutaneous Spinal Implants” And US patent application Ser. No. 11 / 252,880, filed Oct. 19, 2005, “Percutaneous spinal implants and methods”.
本発明は、一般に脊椎状態の治療に関し、詳細には、隣接する棘突起間にインプラントするために経皮的脊椎インプラントを使用する脊椎圧迫の治療に関する。 The present invention relates generally to the treatment of spinal conditions and, in particular, to the treatment of spinal compression using a percutaneous spinal implant to implant between adjacent spinous processes.
多くの個人に影響する背中の状態は、脊椎の狭窄である。脊椎の狭窄は、脊髄を圧迫する脊柱管の漸進性の狭窄である。脊柱内の脊椎骨は、脊椎骨を貫通して延在する開口部を有する。これらの開口部は垂直に整列して、脊柱管を形成する。脊髄は、脊柱管を貫通して走る。脊柱管は狭いため、脊髄から、および隣接する脊椎骨間に延在する脊髄および神経根は圧迫され、炎症を起こす。脊椎の狭窄は、疼痛、衰弱、無感覚、灼熱感、うずき、特に重症例では、膀胱機能もしくは腸機能の損失、または麻痺を生じる可能性がある。脚、ふくらはぎ、および臀部は、脊椎の狭窄によって最も一般的に影響を受けるが、肩および腕も影響を受ける。 The back condition that affects many individuals is spinal stenosis. Spine stenosis is a progressive stenosis of the spinal canal that compresses the spinal cord. The vertebrae in the spinal column have openings that extend through the vertebrae. These openings are vertically aligned to form the spinal canal. The spinal cord runs through the spinal canal. Because the spinal canal is narrow, the spinal cord and nerve roots that extend from the spinal cord and between adjacent vertebrae are compressed and inflamed. Spinal stenosis can cause pain, weakness, numbness, burning, tingling, particularly in severe cases, loss of bladder or bowel function, or paralysis. Legs, calves, and hips are most commonly affected by spinal stenosis, but the shoulders and arms are also affected.
軽症の脊椎の狭窄は、休息または活動の制限、非ステロイド系抗炎症薬(たとえば、アスピリン)、副腎皮質ステロイド(硬膜外ステロイド)、および/または理学療法によって治療される。患者によっては、前屈する、座る、または横になることで疼痛を緩和するのに役立つことが分かっている。これは、前屈することによって、より多くの脊椎骨空間が形成され、一時的に神経圧迫を緩和するからである。脊椎の狭窄は進行性疾患であるため、患者の疼痛は増加し続けるので、圧力源を外科的に修正する必要がある(減圧椎弓切除術)。外科的処置は、脊柱管に当たるか、または脊髄に圧力を加える骨またはその他の組織を除去することができる。2つの隣接する脊椎骨も、脊髄すべり症によって生じるような不安定な領域、不適切な整合またはずれを防止するために、外科的処置の際に融合される場合がある。外科的減圧術は、脊柱管を溶接してさらに空間を形成することによって、脊髄または脊髄神経に対する圧力を緩和することができる。この手順では、患者に切開術を施して脊椎に接近し、圧力の原因になっている領域を除去するために、患者に全身麻酔を行う必要がある。しかし、この手順の場合、血液が失われ、著しい合併症の可能性が増加し、一般に、入院期間が長くなる場合がある。 Mild spinal stenosis is treated with rest or limited activity, non-steroidal anti-inflammatory drugs (eg, aspirin), corticosteroids (epidural steroids), and / or physical therapy. Some patients have been found to help relieve pain by bending forward, sitting, or lying down. This is because bending forward creates more vertebral space and temporarily relieves nerve compression. Since spinal stenosis is a progressive disease, pain in the patient continues to increase and the pressure source must be surgically corrected (decompression laminectomy). Surgical procedures can remove bone or other tissue that strikes the spinal canal or applies pressure to the spinal cord. Two adjacent vertebrae may also be fused during a surgical procedure to prevent unstable areas, improper alignment or misalignment such as that caused by spinal spondylolisthesis. Surgical decompression can relieve pressure on the spinal cord or spinal nerves by welding the spinal canal to create more space. This procedure requires the patient to undergo general anesthesia in order to make an incision in the patient, access the spine, and remove the area causing the pressure. However, this procedure can result in blood loss, increased potential for significant complications, and generally longer hospital stays.
最小限に侵襲的な手順が開発されて、隣接する棘突起間の空間に接近するようになり、大手術の必要はない。しかし、こうした公知の手順は、棘突起が著しく圧迫される状態には適さない。さらに、このような手順は、一般に比較的大規模かまたは複数の切開を伴う。 A minimally invasive procedure has been developed to gain access to the space between adjacent spinous processes, without the need for major surgery. However, these known procedures are not suitable for situations where the spinous processes are significantly compressed. In addition, such procedures are generally relatively large or involve multiple incisions.
したがって、脊椎の狭窄などの脊椎状態の治療を改善する必要がある。 Accordingly, there is a need for improved treatment of spinal conditions such as spinal stenosis.
一実施態様では、装置は、第1構成から第2構成に変形するように構成された近位部分を有する長形部材を備える。この長形部材は、第1構成から第2構成に変形するように構成された遠位部分を有する。非拡張中心部分は、近位部分と遠位部分との間に位置する。非拡張中心部分は、隣接する棘突起に係合するように構成される。 In one embodiment, the apparatus comprises an elongate member having a proximal portion configured to deform from a first configuration to a second configuration. The elongate member has a distal portion configured to deform from a first configuration to a second configuration. The non-expanding central portion is located between the proximal portion and the distal portion. The non-expanded central portion is configured to engage an adjacent spinous process.
もう1つの実施態様では、装置は、案内シャフト、この案内シャフトに結合する拡張部材、およびアクチュエータを備える。拡張部材は、インプラントの内部から力を与えて、インプラントを変形させるように構成される。アクチュエータは拡張部材に結合され、拡張部材を第1位置から第2位置に移動させるように構成される。 In another embodiment, the apparatus comprises a guide shaft, an expansion member coupled to the guide shaft, and an actuator. The expansion member is configured to apply a force from within the implant to deform the implant. The actuator is coupled to the expansion member and is configured to move the expansion member from the first position to the second position.
さらにもう1つの実施態様では、装置は、第1端部および第2端部を有する第1クランプを備える。第1クランプの第2端部は、第1棘突起に係合するように構成される。第2クランプは、第1端部および第2端部を有する。第2クランプの第2端部は、第1棘突起から離間された第2棘突起に係合するように構成される。コネクタは、第1クランプの第1端部および第2クランプの第1端部に結合される。 In yet another embodiment, the apparatus comprises a first clamp having a first end and a second end. The second end of the first clamp is configured to engage the first spinous process. The second clamp has a first end and a second end. The second end of the second clamp is configured to engage a second spinous process spaced from the first spinous process. The connector is coupled to the first end of the first clamp and the first end of the second clamp.
本明細書および添付の請求の範囲で使用する場合、単数形の不定冠詞および定冠詞は、文脈上明らかに違う場合を除いて、複数の指示対象を含む。したがって、たとえば、「1つの部材」は、単数の部材、または複数の部材の組合せを意味することを意図し、「1つの材料」は、1つまたは複数の材料、またはこれらの組合せを意味することを意図する。さらに、「近位」および「遠位」という用語は、医療デバイスの先端(つまり、遠位端)を患者の体内に最初に挿入した状態で、それぞれ医療デバイスを患者に挿入する操作者(たとえば、執刀医、医師、看護師、技術者など)に近い方向、および操作者から離れる方向を意味する。したがって、たとえば、患者の体内に最初に挿入されたインプラントの端部は、インプラントの遠位端であり、患者の体内に最後に入るインプラントの端部は、インプラントの近位端である。 As used in this specification and the appended claims, the singular forms “indefinite” and “definite” include plural referents unless the context clearly dictates otherwise. Thus, for example, “a member” is intended to mean a single member, or a combination of members, and “a material” means one or more materials, or a combination thereof. I intend to. Further, the terms “proximal” and “distal” refer to an operator (eg, a medical device) that inserts a medical device into a patient, respectively, with the medical device tip (ie, the distal end) initially inserted into the patient's body. , Surgeon, doctor, nurse, technician, etc.) and away from the operator. Thus, for example, the end of the implant that was first inserted into the patient's body is the distal end of the implant, and the end of the implant that last enters the patient's body is the proximal end of the implant.
一実施態様では、装置は、たとえば軸方向荷重または半径方向荷重によって第1構成から第2構成に変形するように構成された近位部分を有する長形部材を備える。長形部材は、たとえば軸方向荷重または半径方向荷重によって第1構成から第2構成に変形するように構成された遠位部分を有する。非拡張中心部分は、近位部分と遠位部分との間に位置する。この非拡張中心部分は、隣接する棘突起に係合するように構成される。 In one embodiment, the apparatus comprises an elongate member having a proximal portion configured to deform from a first configuration to a second configuration, eg, by an axial load or a radial load. The elongate member has a distal portion configured to deform from the first configuration to the second configuration, for example, by an axial load or a radial load. The non-expanding central portion is located between the proximal portion and the distal portion. This non-expanded central portion is configured to engage an adjacent spinous process.
本発明の実施態様によって、長形部材は、同時または連続的に第1構成から第2構成に各々移動する複数の部分を有することができる。さらに、デバイス、またはその一部は、第1構成から第2構成に移動する際に、多くの位置に存在することが可能である。参照しやすくするために、全体のデバイスは、第1構成または第2構成に存在する状態を示す。 According to an embodiment of the present invention, the elongated member may have a plurality of portions each moving from the first configuration to the second configuration simultaneously or sequentially. Furthermore, the device, or part of it, can be in many locations as it moves from the first configuration to the second configuration. For ease of reference, the entire device shows a state that exists in the first configuration or the second configuration.
図1は、2つの隣接する棘突起に隣接する本発明の一実施態様による医療デバイスの略図である。医療デバイス10は、近位部分12、遠位部分14、および中心部分16を備える。医療デバイス10は、隣接する棘突起S間に挿入できる第1構成を有する。中心部分16は、棘突起Sに接触して、棘突起Sの過剰伸張/圧縮を防止するように構成される。実施態様によっては、中心部分16は、実質的に隣接する棘突起Sを伸延させない。他の実施態様では、中心部分16は、隣接する棘突起Sを伸延させない。
FIG. 1 is a schematic illustration of a medical device according to one embodiment of the present invention adjacent to two adjacent spinous processes. The
第1構成では、近位部分12、遠位部分14、および中心部分16は同軸である(つまり、共通の長手方向軸を共用する)。実施態様によっては、近位部分12、遠位部分14、および中心部分16は、一定の内径を有する管を画定する。他の実施態様では、近位部分12、遠位部分14、および中心部分16は、一定の外径および/または内径を有する管を画定する。
In the first configuration, the
医療デバイス10は、図2に示すように第1構成から第2構成に移動することが可能である。第2構成では、近位部分12および遠位部分14は、棘突起Sに対するデバイス10の側方移動を制限する位置に配置される。近位部分12および遠位部分14は、第2構成において、棘突起に係合するように構成される(つまり、直接、または周囲の組織を介して)。分かりやすくするために、棘突起Sを囲む組織は図示しない。
The
実施態様によっては、近位部分12、遠位部分14、および中心部分16は、一体成形される。他の実施態様では、近位部分12、遠位部分14、および中心部分16の1つまたは複数は、互いに結合されて医療デバイス10を形成する別個の構成要素である。たとえば、近位部分12および遠位部分14を一体成形し、中心部分は、これらに結合される別個の構成要素で良い。
In some embodiments, the
使用の際、棘突起Sは、医療デバイス10を挿入する前に伸延させることができる。棘突起の伸延について、以下で説明する。棘突起が伸延された場合、トロカールを使用して、医療デバイス10の接近通路を画定することができる。実施態様によっては、トロカールは、通路を画定し、棘突起Sを伸延させるために使用することができる。接近通路がいったん画定された後、医療デバイス10を経皮的に挿入し、最初に遠位端14を棘突起間に前進させて、中心部分16を棘突起S間に配置する。医療デバイス10が棘突起間に配置された後、近位部分12および遠位部分14は、連続的または同時に第2構成に移動される。
In use, the spinous process S can be distracted prior to inserting the
実施態様によっては、医療デバイス10は、経皮的に(つまり、皮膚の開口部を通して)、最小限に侵襲的な方法で挿入される。たとえば、本明細書で詳細に説明するとおり、インプラントの部分のサイズは、インプラントが棘突起間に挿入された後に拡張される。いったん拡張されると、インプラントの拡張部分のサイズは、開口部のサイズより大きくなる。たとえば、開口部/切開部のサイズは、長さ3mm〜長さ25mmである。実施態様によっては、拡張構成におけるインプラントのサイズは、3〜25mmである。
In some embodiments, the
図3は、たとえば、第1構成における医療デバイス10の遠位部分14の特性を表す変形可能要素18の略図である。変形可能部材18は、その長さに沿って切欠部A、B、Cを含み、これは、変形可能部材18が、予め決められた方法で変形することを可能にする脆弱点である。切欠部A、B、Cの深さd、およびスロートT1、T2、T3の幅wに応じて、変形可能部材18が、加わる荷重によって変形する方法を制御し、変えることが可能である。さらに、切欠部A、B、C間の長さL(つまり、切欠部間の材料の長さ)に応じて、変形可能部材18が変形する方法を制御し、変えることができる。
FIG. 3 is a schematic illustration of a
図4は、図3に示す変形可能部材18の拡張特性の略図である。たとえば、矢印Xで指示する方向に荷重が加わると、変形可能部材18は、上記のとおり、変形可能部材18の特性に基づいて予め決められた方法で変形する。図4に示すとおり、変形可能部材18は、切欠部Cの構成によって、および切欠部BおよびC間の距離が短いため、切欠部BおよびCにおいて最も変形する。実施態様によっては、切欠部BおよびC間の変形可能部材18は、棘突起に隣接して適合するサイズである。
4 is a schematic diagram of the expansion characteristics of the
変形可能部材18は、切欠部Aの幅が狭いため、切欠部Aにおいて比較的堅い。図4に示すように、滑らかな遷移は、切欠部AおよびB間の変形可能部材18によって画定される。このように円滑な遷移の場合、切欠部BおよびC間における比較的大幅な遷移の場合よりも、棘突起を囲む組織上の応力は少ない。変形可能部材18の寸法および構成は、様々な切欠部における変形の時期も決定することができる。比較的脆弱な(つまり、比較的深く広い)切欠部は、比較的強力な(つまり、比較的浅く狭い)切欠部よりも先に変形する。
The
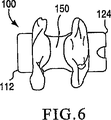
図5および図6は、それぞれ第1構成および第2構成における脊椎インプラント100を示す。図5に示すように、脊椎インプラント100は、第1構成で圧潰され、隣接する棘突起間に挿入することができる。脊椎インプラント100は、第1拡張可能部分110、第2拡張可能部分120、および中心部分150を有する。第1拡張可能部分110は、第1端部112、および第2端部1140を有する。第2拡張可能部分120は、第1端部122、および第2端部124を有する。中心部分150は、第2端部1140と第1端部122との間に結合される。実施態様によっては、脊椎インプラント100は一体成形される。
5 and 6 show the
第1拡張可能部分110、第2拡張可能部分120、および中心部分150は、脊椎インプラント100の長さに沿って共通の長手方向軸Aを有する。中心部分150は、第1拡張可能部分110および第2拡張可能部分120と同じ内径を有する。実施態様によっては、中心部分150の外径は、第1拡張可能部分110および第2拡張可能部分120の外径より小さい。
The first
使用の際、脊椎インプラント100は、経皮的に隣接する棘突起間に挿入される。第1拡張可能部分110は最初に挿入され、棘突起を通過して、中心部分150が棘突起間に配置される。中心部分150の外径は、周囲の靭帯および組織を考慮に入れて、棘突起間の空間よりわずかに小さくて良い。実施態様によっては、中心部分は棘突起に直接接触させて、棘突起の間に配置される。実施態様によっては、脊椎インプラント100の中心部分は一定のサイズであり、圧縮可能または拡張可能ではない。
In use, the
第1拡張可能部分110は、拡張部材115、117および119を備える。拡張部材115、117、119間には、開口部111が画定される。上記のとおり、開口部111のサイズおよび形状は、軸方向荷重が加わった時に、拡張部材115、117、119が変形する方法に影響する。第2拡張可能部分120は、拡張部材125、127、および129を備える。拡張部材125、127、129間には、開口部121が画定される。上記のとおり、開口部121のサイズおよび形状は、軸方向荷重が加わった時に、拡張部材125、127、129が変形する方法に影響する。
The first
軸方向荷重が脊椎インプラント100に加わると、脊椎インプラント100は、図6に示すように第2構成で拡張する。第2構成では、第1拡張可能部分110の第1端部112および第2端部1140は、互いの方向に移動し、拡張部材115、117、119は、実質的に長手方向軸Aから離れて側方に突出する。同様に、第2拡張可能部分120の第1端部122および第2端部124は、互いの方向に移動し、拡張部材125、127、129は長手方向軸Aから離れて側方に突出する。第2構成の拡張部材115、117、119、125、127、129は、棘突起に隣接する位置に延在する突出部を形成し、これらの間に脊椎インプラント100が挿入される。第2構成では、拡張部材115、117、119、125、127、129は、脊椎インプラント100の側方移動を妨げ、中心部分150は、隣接する棘突起が互いに移動して、中心部分150の直径によって画定される距離より接近するのを妨げる。
When an axial load is applied to the
本発明の一実施態様による脊椎インプラント200は、図7〜図9に様々な構成で示す。脊椎インプラント200は、図7に完全圧潰構成で示され、隣接する棘突起間に挿入される。脊椎インプラント200は、第1拡張可能部分210、第2拡張可能部分220、および中心部分250を有する。第1拡張可能部分210は、第1端部212および第2端部214を有する。第2拡張可能部分220は、第1端部222および第2端部224を有する。中心部分250は、第2端部214および第1端部222間に結合される。
A
第1拡張可能部分210、第2拡張可能部分220、および中心部分250は、脊椎インプラント200の長さに沿って共通の長手方向軸Aを有する。中心部分250は、第1拡張可能部分210および第2拡張可能部分220と同じ内径を有することが可能である。中心部分250の外径は、第1拡張可能部分210および第2拡張可能部分220の外径より大きい。中心部分250は、第1拡張可能部分210および第2拡張可能部分220と一体成形するか、または別個に成形して、これらの部分に、またはこれらの部分上に結合することが可能である。
The first
使用の際、脊椎インプラント200は、経皮的に隣接する棘突起S間に挿入される。第1拡張可能部分210は棘突起Sを通過し、中心部分250が棘突起S間に配置される。中心部分250の外径は、周囲の靭帯および組織を考慮に入れて、棘突起S間の空間よりわずかに小さくて良い。実施態様によっては、中心部分250は棘突起Sに直接接触して、棘突起Sの間に配置される。実施態様によっては、脊椎インプラント200の中心部分250は一定のサイズであり、圧縮または拡張可能ではない。他の実施態様では、中心部分250は、棘突起の形状に適合するように圧縮させることができる。
In use, the
第1拡張可能部分210は、拡張部材215、217および219を備える。拡張部材215、217、219の間には、開口部211が画定される。上記のとおり、開口部211のサイズおよび形状は、拡張部材215、217、219が、軸方向荷重が加わった時に変形する方法に影響する。第1拡張可能部分210の各々の拡張部材215、217、219は、開口部211内に延在するタブ213、および対向する嵌合スロット218を含む。実施態様によっては、第1拡張可能部分210の第1端部212は、脊椎インプラント200の挿入を容易にするように円形である。
The first
第2拡張可能部分220は、拡張部材225、227、および229を備える。拡張部材225,227、および229間には、開口部221が画定される。上記のとおり、開口部221は、拡張部材225、227、229が、軸方向荷重が加わった時に変形する方法に影響する。第2拡張可能部分220の拡張部材225、227、229の各々は、開口部221内に延在するタブ223、および対向する嵌合スロット228を含む。
The second
脊椎インプラント200に対して軸方向荷重が加わった時に、脊椎インプラントは、図8に示すように部分的拡張構成に移動する。部分的拡張構成では、第2拡張可能部分220の第1端部222および第2端部224は互いの方向に移動し、拡張部材225、227、229は、長手方向軸Aから離れて側方に突出する。第2拡張可能部分220が拡張するのを防止するため、タブ223はスロット228と係合し、ポジティブストップとして作用する。タブ223がスロット228に係合した後、軸方向荷重が脊椎インプラント200に対して加わり続けると、荷重は第1拡張可能部分210に伝達される。したがって、第1端部212および第2端部214は、次に互いの方向に移動し、タブ213は、図9に示す完全拡張構成でスロット218に係合する。第2構成では、拡張部材215、217、219は、長手方向軸Aから離れて側方に突出する。別法による実施態様によっては、第1拡張可能部分および第2拡張可能部分は、軸方向荷重が加わると同時に拡張する。
When an axial load is applied to the
脊椎インプラント200の拡張の程度は、開口部211および221のサイズを変えることによって制御することができる。たとえば、図7〜図9に示す実施態様では、開口部221は、開口部211よりわずかに大きい。したがって、ノッチ226は、ノッチ216よりわずかに大きい。したがって、図3および図4に関して上記で説明したとおり、第2拡張可能部分220は、軸方向荷重が加わると、第1拡張可能部分210より先に拡張する。
The degree of expansion of the
第2構成では、拡張部材215、217、219、225、227、229は、棘突起Sに隣接する突出部を形成する。第2構成になると、拡張部材215、217、219、225、227、229は、脊椎インプラント200の側方移動を妨げ、中心部分250は、隣接する棘突起が互いに、中心部分250の直径によって画定される距離より、移動して接近するのを妨げる。
In the second configuration, the
棘突起Sの近位の拡張部材215、217、219、225、227、229の各々の部分Pは、部分Pが棘突起Sに実質的に平行であるように拡張する。棘突起Sから遠位の拡張部材215、217、219、225、227、229の各々の部分Dは、緊張が周囲の組織に殆ど加わらないように傾斜させる。
Each portion P of the
第2構成では、拡張部材225、227、229は、図10に示すように軸方向像から約120°だけ分離している。3つの拡張部材が示されているが、複数のインプラント200を複数の隣接する棘突起間に挿入する場合、2つ以上の拡張部材を使用して、重複するかまたは交互になるように配列することができる。さらに、提供される拡張部材の数に関係なく、隣接する拡張部材は、等しい角度または距離で分離する必要はない。
In the second configuration, the
脊椎インプラント200は、脊椎インプラント200の実質的に長手方向軸Aに沿って加わる圧縮力によって変形する。圧縮力は、たとえばロッド(図示しない)を第1拡張可能部分210の第1端部212に取り付けて、ロッドを長手方向軸に沿って引っ張り、対抗する力を第2拡張可能部分220の第2端部224に対して加えることによって加えられる。対抗する力は圧縮力を生じ、その結果、上記のとおり脊椎インプラント200が拡張する。
The
脊椎インプラント200に圧縮力を与えるために使用されるロッドは、脊椎インプラント200に取り外し可能に結合される。たとえば、脊椎インプラント200は、第1拡張可能部分210の第1端部212にねじ山208を備えることができる。ロッドによって加わる力に対抗する力は、第2拡張可能部分220の第2端部224に取り外し可能に結合されるプッシュバー(図示しない)を使用して加えることができる。プッシュロッドは、第2端部224の整列ノッチ206によって、脊椎インプラント200と整列させることができる。脊椎インプラント200は、多様なその他の方法で変形させることができ、その実施例を以下で詳細に説明する。
A rod that is used to apply a compressive force to the
図11〜図14は、本発明の一実施態様による脊椎インプラント300を示す。脊椎インプラント300は、隣接する棘突起S間に配置されるように構成され、第1端部312および第2端部314を有する長形管310を備える。長形管310は、その長さに沿って予め決められた位置に画定された長手方向スロット311を有する。スロット311は、長形管310の各部分が外側に延在して突出部317を形成する。膨張可能部材350は、長形管の周囲であって、スロット311の隣接する集合間に配置される。
11-14 illustrate a
膨張可能部材350は、図11〜図14に示すとおり、隣接する棘突起S間に配置するように構成される。膨張可能部材350は、隣接する棘突起間に挿入された後、たとえば生体適合性材料などの液体および/または気体を使って膨張される。膨張可能部材350は、脊椎インプラント300を棘突起S間の所定の位置に維持するために膨張される。実施態様によっては、膨張可能部材350は、膨張された時に、棘突起Sを少なくとも部分的に伸延させるように構成される。膨張可能部材350は、棘突起S間の様々な間隔を考慮に入れて、様々な寸法に膨張される。
The
膨張可能部材350は、脊椎インプラント300が棘突起S間の所定の位置に配置された後、脊椎インプラント300を通して挿入される膨張管370を介して膨張させることができる。膨張可能部材350が膨張する前あるいは後に、突出部317は拡張される。突出部317を拡張させるために、脊椎インプラント300の第1端部312に結合される引っ張りバー320を使って、軸方向の力を脊椎インプラント300に加える。
The
引っ張りバー320が引っ張られると、軸方向荷重によって、突出部317は外側に座屈し、それによって脊椎インプラントが、棘突起Sに対して側方に移動するのを防止する。図12は、変形時の脊椎インプラント300の図であり、突出部317のみが部分的に形成されている。同時に変形するように図示されているが、別法により、上記のとおり変形が異なる時間に発生するように、スロット311の寸法を決めることができる。脊椎インプラントが拡張構成になると(図13参照)、引っ張りバー320は、長形管310から取り外される。
As the
脊椎インプラント300の向きは、2つの突出部が、図14に示すように互いに隣接する脊椎部分の軸に実質的に平行になる向きである必要はない。たとえば、脊椎インプラント300は、各々の突出部317が、脊髄の軸に対して45°の角度になる向きにすることができる。
The orientation of the
脊椎インプラント100、200、300は、様々な拡張デバイスを使用して、その第1構成から第2構成に変形させることが可能である。たとえば、脊椎インプラント100、200、300の部分、およびその他のタイプのインプラントIは、以下の拡張デバイスを使用して変形させることが可能である。様々なタイプのインプラントIが示されているが、記載されている様々な拡張デバイスは、本明細書に記載するどのインプラントにも使用することができる。
The
図15〜図17は、拡張デバイス1500の一実施態様を示す。拡張デバイス1500は、案内ハンドル1510、ノブ組立体1515、上部筐体1517、シャフト1520、およびインプラント支持部分1530を備える。拡張デバイス1500は、インプラント(図示しない)を隣接する棘突起間に挿入して、上記のとおり、インプラントを拡張させて棘突起間の所定の位置に保持するために使用される。案内ハンドル1510およびノブ組立体1515は共に、拡張デバイス1500を操作してインプラントを挿入するように把持することができる。分かりやすくするために、図15〜図17には特定のインプラントを示さないが、たとえばインプラント200などのインプラントは、拡張デバイス1500と共に使用することができる(図7参照)。
FIGS. 15-17 illustrate one embodiment of an
インプラント支持部分1530は、ロッド1532の表面上にインプラントを摺動可能に収容する。インプラントは、ロッド1532上で摺動し、図15Bに最も良く示されているように、陥凹部1534内に収容される。インプラントは、ねじ付きロッド1570を使用して、インプラント支持部分1530にねじ結合される。ねじ付きロッド1570は、スラスト軸受け1552を使用して、アクチュエータノブ1550内に結合される。整列突出部1536は、陥凹部1534内に配置され、インプラント上の対応するノッチと嵌合して、インプラントの適切な位置決めが確保されるように構成される。
上部筐体1517は、図15Aに最も良く示されているように、シャフト1520を摺動可能に収容する。上部筐体は、シャフト1520上の外側ねじ山1521に嵌合する内側ねじ山1519を備える。アクチュエータノブ1550は、上部筐体1517に結合し、アクチュエータノブ1550が矢印Eの方向に回転した時に、ねじ付きロッド1570が引っ張りバーとして作用し、インプラントが遠位の方向に移動するのを妨げるため、シャフト1520が軸方向にデバイス1500の遠位端方向に移動する。つまり、インプラントが隣接する棘突起間に挿入されると、アクチュエータノブ1515が回転し、シャフト1520の遠位端が、インプラントの近位端に対して軸方向の力を与える。同時に、ねじ付きロッド1570によって、対抗する力が近位の方向に生じる。
シャフト1520およびねじ付きロッド1570によって加わる力により、インプラントの部分は、横構成に拡張して、上記のように棘突起間の所定の位置に維持される。
The force exerted by the
インプラントが所定の位置に配置され、完全に拡張すると、解放ノブ1560が、矢印Rで指示される方向に回転し、ねじ付きロッド1570をインプラントから外すことができる。次に、拡張デバイスを取り外すことができる。
When the implant is in place and fully expanded, the
図18は、圧潰構成の拡張デバイス400を示す。拡張デバイス400は、インプラントI(図18に示さない)上の突出部を所望の位置に選択的に形成するために使用することができる。拡張デバイス400は、拡張デバイス400をインプラントI内に案内できる案内シャフト410と、案内シャフト410に取り付けられ、偏心位置に配置可能なカムアクチュエータ450とを備える。拡張デバイス400は長手方向軸Aを有し、カムアクチュエータ450は、距離dだけ長手方向軸Aから側方に偏位するカム軸Cを有する。図19は、カムアクチュエータ450が、カム軸Cの周囲で回転した状態の拡張構成における拡張デバイス400を示す。
FIG. 18 shows an
拡張デバイス400は、図20に示すインプラントホルダーHを通してインプラントI内に挿入することができる。インプラントホルダーHはインプラントに結合され、インプラントを所定の位置に保持するように構成され、拡張デバイス400はインプラントIを変形させるように操作される。インプラントIが十分に変形すると、インプラントホルダーHは、インプラントIから分離され、患者から取り外すことができ、インプラントIは後方に残される。
The
図20および図21を参照すると、拡張デバイス400は、カムアクチュエータ450を展開させるために使用されるハンドル420を備える。ハンドル420が回転すると、カムアクチュエータ450が展開し、インプラントIを変形させる。カムアクチュエータ450が完全に展開し(たとえば、元の位置から180°)、所定の位置に係止されると、全体の拡張デバイス400が回転し、インプラントIの周囲でインプラントIを変形させる。カムアクチュエータ450は、突出部P(図22参照)を形成するインプラントIの元の直径の外側にある複数の点の軌跡を囲む。拡張デバイス400は、所定の位置に係止された後、案内シャフト410を把持するか、またはハンドル420を使用して回転させることができる。
Referring to FIGS. 20 and 21, the
拡張デバイス400は、複数の突出部Pを形成するために使用することができる。第1突出部Pが形成された後、カムアクチュエータ450は逆に回転して第1構成になり、拡張デバイス400は、インプラントIを通って第2位置に前進することができる。拡張デバイス400が、適切に配置されると、カムアクチュエータ450は、再び展開し、拡張デバイス400が回転して、第2突出部Pを形成する(図23参照)。実施態様によっては、インプラントIは、隣接する棘突起間に配置され、突出部Pは、棘突起の両側に形成されて、インプラントIが側方(つまり、軸方向)に変位するのを防止する。
The
別法による拡張デバイス500を図24および図25に示す。図24は、第1構成における拡張デバイス500を示し、図25は、第2構成における拡張デバイス500を示す。拡張デバイス500は、インプラントI内に挿入される案内シャフト510を備える。軸方向カムシャフトアクチュエータ520は、案内シャフト520内に摺動可能に配置される。軸方向カムシャフトアクチュエータ520は、移動可能な物体550を収容するための傾斜陥凹部530を有する。カムシャフトアクチュエータ520が移動すると、移動可能な物体550は傾斜陥凹部530に沿って変位し、案内シャフト510内の開口部540を通って突出する。
An
移動可能な物体550は、インプラントIの一部分を変位させて、突出部Pを形成するように構成される。複数の移動可能な物体550は、案内シャフト510の周囲に使用して、インプラントIの周囲に半径方向に延在する突出部Pを形成することができる。さらに、突出部は、上記のとおり、拡張デバイス500をインプラントの長さに沿って第2位置に前進させることによって、インプラントIの長さに沿った複数の位置に形成することができる。別法によると、拡張デバイスは、移動可能な物体の他の集合を変位させる複数の陥凹部を有することができる。
The
別法による実施態様では、拡張デバイスは、インプラントとしても役立つ。たとえば、拡張デバイス500は、隣接する棘突起S間に挿入することができ、移動可能な物体は開口部540から移動し、拡張デバイス500は後方に体内に残される。このような実施態様では、移動可能な物体は、拡張デバイス500が棘突起Sに対して側方に移動するのを防止する。
In an alternative embodiment, the expansion device also serves as an implant. For example, the
もう1つの別法による実施態様では、拡張デバイス500に開口部540を有するのではなく、移動可能な物体550は、拡張デバイスの壁部の比較的脆弱な(薄い)部分に配置し、拡張デバイス500の当該部分を突出構成に移動させることができる。
In another alternative embodiment, rather than having an
もう1つの別法による拡張デバイス600は、図26〜図28に示す。図26は、第1構成の拡張デバイス600を示し、図28は、第2構成の拡張デバイスを示す。拡張デバイス600は、インプラントI内に挿入される案内シャフト610を備える。案内シャフト610は、開口部640が内部に画定されている。軸方向カムシャフトアクチュエータ620は、案内シャフト610内に回転可能に結合される。変位可能な物体650は、案内シャフト610内に配置され、案内シャフト610内の開口部640から突出するように構成される。カムシャフトアクチュエータ620が約90°回転すると、移動可能な物体650は開口部640を通って移動し、インプラントIを変形させて突出部Pを形成する。別法によると、拡張デバイスは、移動可能な物体の他の集合を変位させる複数のカムを有することが可能である。
Another
複数の移動可能な物体650は、案内シャフト610の周囲に使用して、インプラントIの周囲に半径方向延在する突出部Pを形成することができる。さらに、この突出部は、上記のとおり、拡張デバイス600をインプラントIの長さに沿って第2位置に前進させることによって、インプラントIの長さに沿った複数の位置に形成することができる。
A plurality of
インプラント拡張デバイス700を図29および図30に示す。インプラント拡張デバイス700は、インプラントI内に挿入するように構成される。インプラント700は、筐体770に結合される案内シャフト710を備える。カムアクチュエータ720は、筐体770内に回転可能に取り付けられ、互いに対向する方向に延在するアーム790を備える。カムアクチュエータ720は、ロッド722を使って回転される。
An
カムアクチュエータ720が回転すると、アーム790は、移動可能な物体750に係合する。移動可能な物体750は、カムアクチュエータが時計方向に回転すると、筐体770から突出するように構成される。移動可能な物体750は、完全に延在すると、インプラントIに係合し、拡張デバイス700は完全に1回転して、インプラントI内に突出部を形成する。
As
突出部が形成された後、ロッド722は反時計方向に回転し、移動可能な物体750をインプラントIから離脱させることができる。拡張デバイス700は、離脱した後、上記のようにインプラントI内の別の位置に前進することができる。
After the protrusion is formed, the
その他の実施態様によっては、インプラントIは、バルーンで作動させることができる。図31は、隣接する棘突起S間に配置されたインプラントIを示す。バルーンアクチュエータ800は、インプラントI内に挿入され、図32のように拡張して、インプラントIをその拡張構成に移動させる。バルーンアクチュエータ800は、拡張した後、収縮させて取り外すことができ、拡張構成のインプラントIが残る。
In other embodiments, the implant I can be actuated with a balloon. FIG. 31 shows an implant I placed between adjacent spinous processes S. FIG.
実施態様によっては、バルーンアクチュエータ800は、棘突起Sの各々の側で拡張する複数の丸い突出部を有することができる。その他の実施態様では、複数のバルーンアクチュエータ800は、インプラントIを拡張させるために使用することができる。
In some embodiments, the
図33は、図34〜図37に示す拡張デバイス950を使用して拡張することができる拡張可能インプラント900の断面図である。インプラント900は、第1端部901および第2端部902を有する長形の本体部分910を有する。第1端部901は、外側にねじを切られた部分911を有し、第2端部は内側にねじを切られた部分912を有する。インプラント900は、外側にねじを切られた部分911に第1の外径D1、および第1の外径D1より広い第2の外径D2を有する。
FIG. 33 is a cross-sectional view of an
拡張デバイス950は、引っ張りバー960および圧縮バー970を備える。実施態様によっては、圧縮バー970は、インプラント900(図34参照)の外側にねじを切られた部分911と嵌合する内側ねじ山971を有するチャネル975を画定する。引っ張りバー960は、インプラント900の内側にねじを切られた部分912と嵌合する外側ねじ山961を有する。
The
使用の際、圧縮バー970は、インプラント900の第1端部901に結合され、第1の外径D1と第2の外径D2との間の遷移部分でインプラント900に当接し、この遷移部分は、圧縮バー970のストップとして機能する。実施態様によっては、インプラント900の外径は実質的に一定であり、圧縮バー970の内径は、圧縮バー970のストップとして役立つように狭くなっている。圧縮バー970が所定の位置に配置されると、引っ張りバー960は、チャネル975を通って挿入され、インプラント900の内側にねじを切られた部分912を介して、インプラント900の第2端部902に結合される(図35参照)。圧縮バー970および引っ張りバー960が、インプラント900に結合されると、引っ張りバー960を引っ張ることができ、対抗する力が圧縮バー970に加えられて、インプラント900が拡張する(図36参照)。インプラント900が完全に拡張すると、圧縮バー970および引っ張りバー960が取り外され、インプラントが後方に体内に残る。
In use, the
本明細書で説明する拡張デバイスの場合、突出部の位置は、予め決められた拡張位置を有するのではなく、生体内で選択することができる。こうした構成は、複数のサイズのスペーサを用意する必要性を少なくする。さらに、突出部が展開するタイミングを変えることができる。 In the case of the expansion device described herein, the position of the protrusion can be selected in vivo rather than having a predetermined expansion position. Such a configuration reduces the need to prepare spacers of multiple sizes. Furthermore, the timing which a protrusion part expand | deploys can be changed.
本明細書で説明する様々なインプラント100、200、300は、たとえばステンレス鋼、プラスチック、ポリエーテルエーテルケトン(PEEK)、カーボンファイバ、超高分子(UHMW)ポリエチレンなどから製造することができる。材料は、骨の引っ張り強さと同等、またはそれ以上の引っ張り強さを有することが可能である。
The
本発明の他の実施態様では、アパーチャは、第1端部および第2端部を有する第1クランプを備える。第1クランプの第2端部は、第1棘突起に係合するように構成される。第2クランプは、第1端部および第2端部を有する。第2クランプの第2端部は、第1棘突起から離間される第2棘突起に係合するように構成される。コネクタは、第1クランプの第1端部、および第2クランプの第1端部に結合される。 In another embodiment of the invention, the aperture comprises a first clamp having a first end and a second end. The second end of the first clamp is configured to engage the first spinous process. The second clamp has a first end and a second end. The second end of the second clamp is configured to engage a second spinous process spaced from the first spinous process. The connector is coupled to the first end of the first clamp and the first end of the second clamp.
図38は、2つの隣接する棘突起に取り付けられた本発明の一実施態様による医療デバイスの略図である。装置1010は、第1棘突起Sに結合するように構成された第1クランプ1012と、第2棘突起Sに結合するように構成された第2クランプ1014とを含む。第1クラン1012および第2クランプ1014は、矢印Xで指示される方向に互いに離れて移動するように構成される。第1クランプ1012および第2クランプ1014が移動して離れると、隣接する棘突起S間の開口部が拡張する。挿入物1050は、矢印Yで指示する方向に棘突起S間に挿入され、開口部を棘突起S間に維持することができる。クランプ1012、1014は、十分な力で棘突起Sに係合し、クランプ1012、1014が広がって離れると、棘突起Sは側方に変位する。
FIG. 38 is a schematic illustration of a medical device according to one embodiment of the present invention attached to two adjacent spinous processes. The
図39は、脊髄の一部分に結合される本発明の一実施態様による医療デバイスの側面図である。脊髄を囲む組織は、わかりやすくするために図示しない。医療デバイス1000は、第1クランプ1100および第2クランプ1200を備える。第1クランプ1100は近位端1120および遠位端1140を有する。第1クランプ1100の遠位端1140は、第1棘突起Sに係合するように構成される。第2クランプ1200は、第1端部1220および第2端部1240を有する。第2クランプ1200の第2端部1240は、第1棘突起Sから離間される第2棘突起Sに係合するように構成される。
FIG. 39 is a side view of a medical device according to one embodiment of the present invention coupled to a portion of the spinal cord. The tissue surrounding the spinal cord is not shown for clarity. The
コネクタ1300は、第1クランプ1100の近位端1120、および第2クランプ1200の第1端部1220に結合される。第1クランプ1100および第2クランプ1200に対するコネクタ1300の位置は、第1クランプ1100および第2クランプ1200間の距離を調節できるように調節することが可能である。つまり、コネクタ1300は、第1構成と第2構成との間で再構成可能である。第1クランプ1100は、コネクタ1300が第1構成にある時は第2クランプ1200からの第1距離にあり、コネクタ1300が第2構成にある時には、第2クランプ1200からの第2距離にある。
The
第1クランプ1100が示されている図40を参照すると、第1クランプ1100は、第1かみ合い部1150と、第1かみ合い部1150に対向する第2かみ合い部1130とを備える。第1かみ合い部1150および第2かみ合い部1130は、第1構成と第2構成との間で移動可能であるように構成される。第1かみ合い部1150および第2かみ合い部1130は、第1構成の場合よりも、第2構成において互いに接近している。第2構成では、第1かみ合い部1150および第2かみ合い部1130は十分な力で棘突起Sに係合し、コネクタ1300が第2構成に移動し、それによって棘突起Sを分離させた時に、棘突起Sに対する第1クランプ1100および第2クランプ1200の向きを実質的に維持することができる。第2クランプ1200は類似構成を有するが、分かりやすくするために図示しない。かみ合い部1150、1130の材料は、上記のとおり棘突起Sに十分に係合するが、棘突起を損傷しない材料である。適切な材料としては、たとえば、ステンレス鋼、ポリエーテルエーテルケトン(PEEK)、カーボンファイバ、超高分子(UHMW)ポリエチレンなどが挙げられる。この材料は、骨の引っ張り強さと同等、またはそれ以上の引っ張り強さを有することが可能である。実施態様によっては、クランプ1200をステンレス鋼から製造し、PEEKまたはカーボンファイバのコーティングおよび/または外側被覆または上張層をかみ合い部1150、1130に塗布することができる。
Referring to FIG. 40 in which the
実施態様によっては、医療デバイス100は、大幅に圧縮された脊椎骨の隣接する棘突起を分離するために使用される。さらに、医療デバイス100は、脊椎骨に侵入せずに、手順時に棘突起を安定させる。
In some embodiments, the
実施態様によっては、第1クランプ1100は、第1アーム1170および第2アーム1180、並びに緊張部材1160を備える。第1アーム1170および第2アーム1180は弾性結合されるため、第1アーム1170および第2アーム1180は、緊張部材1160がクランプ1100の遠位端1140方向に前進する時に互いの方向に移動するが、緊張部材1160がクランプ1100の遠位端1140から移動して離れる時に、第1アーム1170および第2アーム1180は初期位置に復帰する(つまり、離間される)。
In some embodiments, the
緊張部材1160は、第1アーム1170および第2アーム1180が、互いの方向に移動する時に、第1かみ合い部1150および第2かみ合い部1130が第1構成と第2構成との間で移動するように構成される。緊張部材1160が第1かみ合い部1150および第2かみ合い部1130方向に移動すると、第1かみ合い部1150および第2かみ合い部1130は棘突起Sに係合する。用途によっては、クランプ1100の遠位端1140は、クランプ1100が結合される脊椎骨の薄層Lに隣接して配置される。実施態様によっては、クランプ1100は、棘突起上のレバーアームを最小限にするために、薄層Lに近接して取り付けらられる。クランプ1100の遠位端1140は、薄層Lに侵入しない。
The
別法による実施態様では、緊張部材は、第1クランプ上のねじ山に係合するねじ山を備える。このような実施態様では、緊張部材は、緊張部材を回転させることによって、第1クランプの長さに沿って移動する。図40に戻ると、緊張部材1160は、第1クランプ1100のテーパ付き部分1110に嵌合するテーパ付き部分1190を任意に備える。このような構成は、棘突起Sに対する力が適切に分配されることを確実にする。第2クランプ1200は同様に構成され、緊張部材126および対向するかみ合い部を備える。
In an alternative embodiment, the tension member comprises a thread that engages a thread on the first clamp. In such an embodiment, the tension member moves along the length of the first clamp by rotating the tension member. Returning to FIG. 40, the
揺動アーム1700は、第1クランプ1100および第2クランプ1200の間において、コネクタ1300に枢着される。揺動アーム1700は弓形部分173を有し、ある運動範囲に沿って移動する。揺動アーム1700の弓形部分173は、第1端部1750および第2端部1770を有する。
The
図41および図42に最も良く示されているように、揺動アーム1700の弓形部分173の第2端部1770は、たとえば鋭利なトロカール先端などの作業ツール1840を収容するように構成される。揺動アーム1700は、作業ツール1840の少なくとも1つの部分が収容される開口部1740を画定する。実施態様によっては、開口部1740は、弓形部分173の全長に沿って、第1端部1750および第2端部1770の間に延在する。実施態様によっては、任意のハンドル190は、第1クランプ1100および/または第2クランプ1200に結合され、クランプ1100、1200を容易に挿入し、使用時の装置1000の安定性を増加させることができる。
As best shown in FIGS. 41 and 42, the
作業ツール1840は、ガイドワイヤ1860に結合される。ガイドワイヤ1860は、第1端部1810および第2端部1830を有する。ガイドワイヤ1860の第2端部1830は、作業ツール1840に結合される。リテーナ1820(以下で詳細に説明する)は、ガイドワイヤ1860の第1端部1810に結合され、揺動アーム1700に対する作業ツール1840の位置を維持するように構成される。リテーナ1820は、揺動アーム1700内の陥凹部1720内に嵌合的に収容される。ガイドワイヤ1860は、揺動アーム1700内に画定される開口部1740内に収容される。ガイドワイヤは、図43に最も良く示されているように、揺動アーム1700内に画定されたチャネル1760を通して開口部1740内に収容される。別法による実施態様によっては、ガイドワイヤは、揺動アーム1700の開口部1740を通って延在しない。さらに他の別法による実施態様では、ガイドワイヤは存在しない。
図44および図45は、それぞれ第1構成および第2構成のリテーナ1820を示す。リテーナ1820は、開口部1870を画定する筐体1880を備え、ガイドワイヤ1860は、開口部1870を通って移動可能に配置される。ガイドワイヤ1860は、保持部材1830に結合される。保持部材1830は、ばね1850によって筐体1880の第1端部1890方向に付勢される。ばね1850は、筐体1880の第2端部1810と保持部材1830との間に位置する。
44 and 45 show a
使用の際、リテーナ1850が第1構成(図44)にある場合、作業ツールは揺動アーム1700内に保持される。リテーナ1820が第2構成(図45)に移動すると、作業ツール1840を揺動アーム1700から取り外すことができる。リテーナ1820は、第2構成に移動すると、距離dだけ変位し、それによってガイドワイヤ1860の有効長さが増加し、作業ツール1840は、揺動アーム1700の端部に対して移動可能になる。実施態様によっては、距離dは、揺動アーム1700内に収容される作業ツール1840の部分の長さとほぼ同じである。
In use, the work tool is held in the
図46に示すように、作業ツール1840’は、揺動アーム1700’によって画定される開口部1740’内に挿入される。揺動アーム1700’は、作業ツール1840’上の陥凹部1970と嵌合する開口部1740’内に突出部1920を備える。
As shown in FIG. 46, the work tool 1840 'is inserted into an opening 1740' defined by the swing arm 1700 '. The swing arm 1700 'includes a
図39〜図42を参照すると、使用の際、第1クランプ1100は、本体Bを通って挿入され、棘突起Sに結合する。緊張部材1160は、第1クランプの遠位端1140方向に移動して、第1かみ合い部1150および第2かみ合い部1130を棘突起Sに係合させる。次に、第2クランプ1200が挿入され、同様に、隣接する棘突起Sに結合する。コネクタ1300が作動すると、第1クランプ1100と第2クランプ1200との間の距離を増加し、それによって隣接する棘突起Sを分離させる。棘突起Sが分離すると、揺動アーム1700は、その移動範囲Mだけ移動する。
39-42, in use, the
揺動アーム1700は、本体Bの外側の位置から、移動範囲Mだけ移動する(たとえば、図41参照)。揺動アーム1700は本体Bに入り、隣接する棘突起S間の目標T(たとえば、図39参照)になるまで、移動範囲Mだけ移動する。
The
本体内への揺動アーム1700の移動は、組織(図示しない)内の通路を画定する。組織には、鋭利な突出部(つまり、作業ツール1840)が貫通する。揺動アーム1700によって画定される通路Mは、隣接する棘突起S間に通路Tを備える。通路が画定された後、揺動アーム1700は取り外され、以下で詳細に説明するスペーサ500(図49参照)は、隣接する棘突起S間に挿入することができる。本発明の実施態様によっては、スペーサ5000は、揺動アーム1700に取り外し可能に取り付け、本体内に挿入し、次に揺動アーム1700から取り外すことができる。
Movement of the
本発明の一実施態様による医療デバイス2000を図47に示す。医療デバイス2000は、アーム2700に結合されたハンドル2900を備える。アーム2700は、第1端部2750および第2端部2770を有し、その長さに沿って開口部2740を画定する。作業ツール2840は、第2端部2770に隣接する開口部2740内に収容することができる。アーム2700は、上記のリテーナ1850に類似するリテーナ(図示しない)を収容する陥凹部2720も含む。医療デバイス2000は、上記の揺動アーム1700と同様に、隣接する棘突起間に挿入される。しかし、アーム2700の深さおよび配置は、医療デバイス2000のユーザが決定する。このような医療デバイスは、上記のクランプ1100、1200の利益の有無に関わらず使用することができる。つまり、医療デバイス2000は、最初に棘突起Sを分離せずに、隣接する棘突起S間に挿入することができる。
A
本発明のもう1つの実施態様による医療デバイスを図48に示す。医療デバイス2010は、ハンドル2011、曲線シャフト2020、および伸延部分2030を有する伸延ツールである。伸延部分2030は、鋭利な先端2032、および挿入位置指示器2034を備える。医療デバイス2010は、患者の背中に挿入され、棘突起の側部から隣接する棘突起間に移動される(つまり、後部−側部接近)。曲線シャフト2020の構成は、棘突起に対する側部接近の使用に役立つ。伸延部分2030は、患者の組織を通る通路を隣接する棘突起間に画定する。
A medical device according to another embodiment of the present invention is shown in FIG. The
位置表示器2034は、医療デバイス2010が適切な距離だけ挿入された場合に(たとえば、位置表示器2034が棘突起に係合した時に)、医師が、触感によって確認することが可能な物理的な隆起部または戻り止めで良い。位置表示器2034は、別法によると、X線透視装置を使用して画像形成できる放射線不透過性ストリップで良い。さらに別法によると、蛍光透視鏡標示(図示しない)を、伸延部分2030内のシャフト2020上に配置することができる。この標示は、棘突起間の間隔、および/または棘突起に対する伸延部分2030の位置を決定するように画像形成することができる。棘突起が適切に伸延されると、医療デバイス2010は取り外される。医療デバイス2010を取り外した後、インプラント(図48に示さない)は、挿入ツールを使用して棘突起間に配置し、棘突起の移動範囲における棘突起間の最小距離を制限することができる。
The
本発明の一実施態様による医療デバイス100に使用される別法による揺動アーム1700’’を図49a〜図49cに示す。図49aおよび図45cに最も良く示されているとおり、揺動アーム1700’’の第2端部1770’’は、たとえば鋭利なトロカールの先端などの作業ツール1840’’を収容するように構成される。揺動アーム1700’’は、作業ツール1840’’の少なくとも一部分が収容される開口部1740’’を画定する。実施態様によっては、開口部1740’’は、揺動アーム1700’’の全長に沿って、第1端部1750’’と第2端部1770’’間に延在し、通路または内腔を画定する。開口部1740’’は、作業ツール1840’’が、使用の際、開口部1740’’内に配置されるように、作業ツール1840’’の直径よりわずかに大きい。
An
作業ツール1840’’は、ワイヤ1860’’に結合される。ワイヤ1860’’は、第1端部1810’’および第2端部1830’’を有する。ワイヤ1860’’の第2端部1830’’は、作業ツール1840’’に結合される。リテーナ1820’’(以下で詳細に説明する)は、ワイヤ1860’’の第1端部1810’’に結合され、揺動アーム1700’’に対する作業ツール1840’’の位置を保持するように構成される。実施態様によっては、力が作業ツール1840’’に加わった時に、作業ツール1840’’が開口部1740’’内に収縮しないように、ワイヤ1860’’は実質的に剛体である。
リテーナ1820’’は、揺動アーム1700’’内の陥凹部1720’’内に収容される。リテーナ1820’’は、ねじ付き固締具173’’を使用して陥凹部1720’’内に保持される。別法による実施態様によっては、ワイヤ1860’’は、揺動アーム1700’’の開口部1740’’を通って延在しない。さらに他の別法による実施態様では、ワイヤ1860’’は存在しない。
The
図50〜図59は、隣接する棘突起S間に挿入可能な様々なスペーサ5000を示す。スペーサ5000が棘突起S間に挿入されると、スペーサ5000のタイプに応じて、スペーサ5000は、所定の位置に保持されるように変形可能である。たとえば、実施態様によっては、バルーンアクチュエータ5500をスペーサ内に挿入して拡張させ、それによってスペーサ5000の両端を拡張し、スペーサ5000を棘突起S間に保持することができる(たとえば、図50、図52および図56参照)。スペーサ5000が拡張すると、バルーンアクチュエータ5500を収縮させて、取り外すことができる(たとえば、図57参照)。
50-59 show
本発明の実施態様によっては、スペーサ5000は、揺動アーム1700’上の突出部1920と嵌合するように構成された陥凹部5970を含む端部分5750を備える(図46参照)。
In some embodiments of the present invention, the
もう1つの実施態様では、方法は、それぞれ第1構成、第2構成、および第3構成を有する拡張可能部材を経皮的に体内に挿入するステップを含む。拡張可能部材は、支持部分および保持部分を備える。支持部分は長手方向軸を有し、隣接する棘突起間に配置されるように構成される。保持部分は、長手方向軸に沿った支持部分の移動を制限するように構成される。拡張可能部材は、第1構成にある場合、隣接する棘突起間の第1位置に配置される。次に、拡張可能部材は、前記第1構成から前記第2構成で拡張される。次に、拡張可能部材は、第2構成から第3構成に収縮し、第2位置に配置され、第2位置は、第1位置とは異なる。 In another embodiment, the method includes transcutaneously inserting an expandable member having a first configuration, a second configuration, and a third configuration, respectively, into the body. The expandable member includes a support portion and a retention portion. The support portion has a longitudinal axis and is configured to be disposed between adjacent spinous processes. The retaining portion is configured to limit movement of the support portion along the longitudinal axis. The expandable member is disposed at a first position between adjacent spinous processes when in the first configuration. Next, the expandable member is expanded from the first configuration to the second configuration. The expandable member then contracts from the second configuration to the third configuration and is disposed at the second position, the second position being different from the first position.
実施態様によっては、装置は、支持部分、保持部分、第1構成、および第2構成を有する拡張可能部材を備える。支持部分は長手方向軸を有し、隣接する棘突起間に配置されるように構成される。保持部分は支持部分に隣接して配置され、長手方向軸に沿った支持部分の移動を制限するように構成される。第1構成にある場合、拡張可能部材は第1の容積を有する。第2構成にある場合、拡張可能部材は、第1の容積より大きい第2の容積を有する。拡張可能部材は、第1構成から第2構成に移動し、第2構成から第1構成に移動するように構成される。 In some embodiments, the apparatus comprises an expandable member having a support portion, a holding portion, a first configuration, and a second configuration. The support portion has a longitudinal axis and is configured to be disposed between adjacent spinous processes. The retaining portion is disposed adjacent to the support portion and is configured to limit movement of the support portion along the longitudinal axis. When in the first configuration, the expandable member has a first volume. When in the second configuration, the expandable member has a second volume that is greater than the first volume. The expandable member is configured to move from the first configuration to the second configuration and from the second configuration to the first configuration.
実施態様によっては、この装置は、拡張可能部材に結合されるセンサを備える。センサは、たとえば、拡張可能部材に加わる力、および/または拡張可能部材内の流体の圧力を測定する歪ゲージセンサまたは圧電センサで良い。 In some embodiments, the device comprises a sensor coupled to the expandable member. The sensor may be, for example, a strain gauge sensor or a piezoelectric sensor that measures the force applied to the expandable member and / or the pressure of the fluid within the expandable member.
実施態様によっては、装置は、実質的に剛体の支持部材、第1拡張可能部材、および第2拡張可能部材を備える。支持部材は、隣接する棘突起間に配置されるように構成される。第1拡張可能部材は、支持部材の近位部分に結合され、第1の容積を有する第1構成と、第1の容積より大きい第2の容積を有する第2構成とを有する。同様に、第2拡張可能部材は、支持部材の遠位部分に結合され、第1の容積を有する第1構成と、第1の容積より大きい第2の容積を有する第2構成とを有する。 In some embodiments, the device comprises a substantially rigid support member, a first expandable member, and a second expandable member. The support member is configured to be disposed between adjacent spinous processes. The first expandable member is coupled to the proximal portion of the support member and has a first configuration having a first volume and a second configuration having a second volume greater than the first volume. Similarly, the second expandable member is coupled to the distal portion of the support member and has a first configuration having a first volume and a second configuration having a second volume greater than the first volume.
図60A〜図60Dは、第1構成(図60A)、第2構成(図60Bおよび図60D)、および第3構成(図60C)における2つの隣接する棘突起Sに隣接して配置された本発明の一実施態様による医療デバイス4000の略背面図である。医療デバイス4000は、内側領域(図示しない)および外面4010を有する拡張可能部材4002を備える。外面4010は、棘突起Sの過剰伸張/圧縮を防止するため、棘突起S間に配置されるように構成される。実施態様によっては、拡張可能部材4002は、隣接する棘突起Sを伸延させる。その他の実施態様では、拡張可能部材4002は、隣接する棘突起Sを伸延させない。
60A-60D show a book placed adjacent to two adjacent spinous processes S in a first configuration (FIG. 60A), a second configuration (FIGS. 60B and 60D), and a third configuration (FIG. 60C). 1 is a schematic rear view of a
拡張可能部材4002は、それぞれ第1構成、第2構成、および第3構成を有する。各々の構成では、拡張可能部材4002は、対応する容積を有する。図60Aに示すように、第1構成は、拡張可能部材4002が最小容積を有する実質的に収縮した状態を表す。拡張可能部材4002が第1構成の場合、医療デバイス4000は、隣接する棘突起S間に挿入される。図60Bおよび図60Dに示すように、第2構成は、拡張可能部材4002が大きい容積を有する拡張状態を表す。拡張可能部材4002が第2構成の場合、医療デバイス4000の外面4010は、棘突起の移動範囲の少なくとも一部分において、隣接する棘突起Sに接触する。図60Cに示すように、第3構成は、拡張可能部材4002が、第1構成に対応する容積と、第2構成に対応する容積との間の容積を有する部分的に拡張した状態を表す。拡張可能部材4002が第3構成の場合、医療デバイス4000は、図60Cに矢印で示すように、隣接する棘突起間に再配置される。次に、医療デバイスは、図60Dに示すように、第2構成に再度拡張することが可能である。
The
図61A〜図61Cは、それぞれ第1構成、第2構成、および第3構成において、2つの隣接する棘突起Sに隣接して配置された医療デバイス4000の略背面図である。上記のとおり、拡張可能部材4002が第1構成の場合、医療デバイス4000は隣接する棘突起S間に挿入される。次に、拡張可能部材4002は、医療デバイス4000の外面4010が隣接する棘突起Sに配置される第2構成で拡張する。次に、拡張可能部材4002は、第3構成に収縮し、図61Cに示すように、医療デバイス4000の取り外しを容易にする。実施態様によっては、第3構成は、第1構成と同じで良い。
61A-61C are schematic rear views of a
使用の際、隣接する棘突起Sは、医療デバイス4000を体内に挿入する前に伸延させることができる。棘突起の伸延は、本明細書で説明する。棘突起Sが伸延すると、トロカール(図示しない)を使用して、医療デバイス4000の接近通路(図示しない)を画定することができる。実施態様によっては、トロカールを使用して通路を画定し、棘突起Sを伸延させることができる。接近通路が画定された後、医療デバイス4000を経皮的に挿入し、棘突起S間に前進させ、隣接する棘突起S間の所望の位置に配置する。医療デバイス4000が所望の位置になったら、拡張可能部材が第2の状態に拡張し、外面4010が棘突起Sに係合する。
In use, the adjacent spinous process S can be distracted prior to inserting the
実施態様によっては、隣接する棘突起は、骨を伸延させるように構成された第1拡張可能部材(図示しない)によって伸延させることが可能である。伸延の後、第1拡張可能部材は収縮し、体内から取り外すことができる。次に、医療デバイス4000は経皮的に挿入され、上記のとおり、棘突起S間に前進して、所望の位置に配置されて拡張する。
In some embodiments, adjacent spinous processes can be distracted by a first expandable member (not shown) configured to distract the bone. After distraction, the first expandable member contracts and can be removed from the body. Next, the
実施態様によっては、医療デバイス4000は経皮的に(つまり、皮膚内に開口部を通して)、最小限に侵襲的な方法で挿入される。たとえば、本明細書で説明するとおり、医療デバイス4000の部分の全体的なサイズは、医療デバイス4000が隣接する棘突起S間に挿入された後、拡張可能部材4002を第1構成から第2構成に遷移させることによって増加される。第2構成で拡張すると、医療デバイス4000の部分のサイズは、開口部のサイズより大きくなる。たとえば、皮膚の開口部/切開部のサイズは、開口部を横断して長さ3mm〜長さ25mmで良い。実施態様によっては、拡張した第2構成における医療デバイス4000のサイズは、開口部を横断して3〜25mmである。
In some embodiments, the
図62A〜図62Fは、第1側方位置(図62C)および第2側方位置(図62E)の隣接する棘突起S間に挿入された本発明の一実施態様による脊椎インプラント4100の背面図である。脊椎インプラント4100は、拡張可能部材4102、センサ4112、およびバルブ4132を備える。拡張可能部材4102は、内側の領域(図示しない)、外面4110、支持部分4118、近位の保持部材4114、および遠位の保持部分4116を有する。拡張可能部材4102は、第1構成(図62B)、第2構成(図62C、図62E、および図62F)、および第3構成(図62D)に繰り返し再配置可能である。各々の構成では、拡張可能部材4102は、以下で説明するとおり、対応する容積を有する。
62A-62F are rear views of a
使用の際、脊椎インプラント4100は、挿入および/または取り外しの時に、実質的に収縮した第1構成で配置される(図62B参照)。上記のとおり、脊椎インプラント4100は、経皮的に隣接する棘突起S間に挿入される。拡張可能部材4102の遠位の保持部分4116が最初に挿入され、棘突起Sを通過して、支持部分4118が棘突起S間に配置される。第1構成にある場合、支持部分4118は、棘突起Sを囲む靭帯および組織を考慮してサイズを決めることができる。分かりやすくするため、このように囲まれている靭帯および組織は図示しない。
In use, the
図62Cに示すように、拡張可能部材4102は、所定の位置に配置されると、流体(図示しない)を拡張可能部材4102の外側の領域から、拡張可能部材4102の内側領域に搬送することによって第2構成で拡張する。この流体は、バルブ4132に嵌合するカテーテルなどの拡張ツール4130によって搬送される。バルブ4132は、拡張可能部材4102の内側領域を拡張可能部材4102の外側の領域に密封接続するのに適する任意のバルブで良い。たとえば、実施態様によっては、バルブ4132は、たとえばポペットバルブ、ピンチバルブ、または2方向逆止バルブなどで良い。他の実施態様では、バルブは、拡張ツール4130をバルブ4132に繰り返し結合し、バルブ4132から繰り返し取り外すことを可能にするように構成された結合部分(図示しない)を備える。たとえば、実施態様によっては、バルブ4132は、拡張ツール4130およびバルブ4132を嵌合するように構成されたねじ部分を備えることができる。
As shown in FIG. 62C, the
この流体は、流体特性を維持しつつ、拡張可能部材4102の内側領域に留まるように構成される。このようにして、脊椎インプラント4100は、拡張可能部材4102の内側領域から流体を除去することによって、拡張した第2構成から第1構成および/または第3構成に繰り返し遷移することが可能である。実施態様によっては、流体は、一定またはほぼ一定の生体適合性液体で良い。こうした液体としては、たとえば生理食塩水溶液が挙げられる。その他の実施態様では、こうした流体は、時間の経過とともに変化する材料特性を有しつつ、流体の除去を可能にするのに十分な流体特性を維持するように構成された生体適合性液体で良い。たとえば、流体の粘度は、硬化剤などを添加することによって増加することができる。このようにして、流体は、不可欠の構造支持を提供しつつ、拡張可能部材4102の内側領域から、バルブ4132を介して除去される能力も維持する。さらに他の実施態様では、流体は生体適合性の気体で良い。
This fluid is configured to remain in the inner region of the
支持部分4118の外面4110は、拡張可能部材4102が、図62Cに矢印で指示したように、拡張可能部材4102が第2構成で拡張する時に、隣接する棘突起Sを伸延することができる。実施態様によっては、支持部分4118は、隣接する棘突起Sを伸延させない。たとえば、上記のとおり、隣接する棘突起Sは、トロカールおよび/または伸延に適するその他のデバイスによって伸延させることはできない。
The
第2構成では、支持部分4118の外面4110は、棘突起Sの運動範囲の少なくとも一部分において棘突起Sに係合し、棘突起Sの過剰伸張/圧縮を防止するように構成される。実施態様によっては、支持部分4118の外面4110は、連続的に棘突起Sに係合するのではなく、脊椎の伸展後に係合する。
In the second configuration, the
第2構成では、近位の保持部分4114および遠位の保持部分4116は各々、棘突起間の垂直距離D1(図63に示す)より大きいサイズS1(図63に示す)を有する。このようにして、近位の保持部分4114および遠位の保持部分4116は、棘突起Sの両側に隣接して配置され(つまり、直接接触するか、または周囲の組織を通して接触)、それによって脊椎インプラント4100が、支持部分4118の長手方向軸に沿って側方に移動するのを制限する。
In the second configuration, the
拡張可能部材4102は、たとえば、PET、ナイロン、架橋ポリエチレン、ポリウレタン、およびPVCなど、任意の数の生体適合性材料から製造することができる。実施態様によっては、選択される材料は実質的に非弾性で良く、その結果、低コンプライアントの拡張可能部材4102が形成される。その他の実施態様では、選択される材料は比較的高弾性で良く、その結果、高順応性の拡張可能部材4102が形成される。さらに他の実施態様では、拡張可能部材4102は、拡張可能部材4102の1つの部分、たとえば支持部分4118が低コンプライアントであり、拡張可能部材4102の他の部分、たとえば近位の保持部分4114および/または遠位の保持部分4116は比較的高順応性であるように、材料の組合せから製造することができる。さらに他の実施態様では、拡張可能部材4102は、構造的剛性を与えるために剛体で柔軟性のない材料を含むことができる。たとえば、支持部分4118は、隣接する棘突起の伸延を容易にするために、剛性の非可撓性材料を含む複合材料から構成することができる。
The
実施態様によっては、拡張可能部材4102は、挿入および/または再配置の際に、脊椎インプラント4100の位置の追跡を容易にするために、ビスマスなどの放射線不透過性材料を含む。その他の実施態様では、拡張可能部材4102の拡張に使用される流体は、脊椎インプラント4100の位置の追跡を容易にするために、放射線不透過性トレーサを含む。
In some embodiments, the
図示の実施態様では、脊椎インプラント4100は、拡張可能部材4102に結合されたセンサ4112を備える。実施態様によっては、センサ4112は、拡張可能部材4102の支持部分4118に加わる力を測定する歪ゲージセンサである。センサ4112は、圧縮力および/または張力など、複数の力の量を容易に測定するために、複数の歪ゲージを備えることができる。その他の実施態様では、センサ4112は、拡張可能部材4102の内側部分の内部に含まれた流体の力および/または圧力を測定するように構成された可変キャパシタンスタイプの圧力センサである。さらに他の実施態様では、センサ4112は、拡張可能部材4102の内側部分の内部に含まれた流体の圧力を測定する圧電センサである。さらに他の実施態様では、脊椎インプラント4100は、拡張可能部材4102に加わる力および/または圧力の空間プロファイルを提供するため、様々な位置に配置される複数のセンサ4112を備えることができる。このようにして、施術者は、脊椎インプラント4100の緩みなどを生じる恐れがある患者の状態の変化を検出することができる。
In the illustrated embodiment,
実施態様によっては、センサ4112は、外部の誘導デバイスによって遠隔制御することができる。たとえば、外部無線周波数(RF)送信機(図示しない)を使用して、センサ4112に電力を供給し、センサ4112と通信することができる。その他の実施態様では、外部音響信号送信機(図示しない)を使用して、センサ4112に電力を供給し、センサ4112と通信することができる。このような構成では、たとえば、センサは、圧力を測定するための上記のタイプの圧力センサと、音響トランスデューサと、エネルギー蓄積デバイスとを備えることができる。音響トランスデューサは、電気エネルギーと音響エネルギーとの間でエネルギーを変換する。エネルギー蓄積デバイスは、音響トランスデューサによって変換された電気エネルギーを蓄積し、電気エネルギーを供給して、圧力センサの動作を支援する。このようにして、外部源からの音響エネルギーを受信して、圧力センサに電力を供給するために使用される電気エネルギーに変換することが可能である。同様に、圧力センサから出力される電気信号は、音響エネルギーに変換され、外部源に送信することが可能である。
In some embodiments,
この時点では、脊椎インプラント4100は、再配置する必要がある。このような再配置は、たとえば、挿入プロセスにおける支持部分4118の側方位置を最適化するために必要になる可能性がある。他の場合には、脊椎インプラント4100は、患者の状態の変化に適応するために、挿入プロセスの後に再配置する必要がある可能性がある。さらに他の場合には、脊椎インプラント4100は、患者から取り外すことが可能である。このような再配置および/または取り外しを可能にするため、脊椎インプラントは、第1構成、第2構成、および/または第3構成において繰り返し再配置可能である。図62Dでは、たとえば、拡張可能部材4102は、上記のとおり、内部領域に含まれている流体の全部または一部分を除去することによって、第3構成に収縮される。このようにして、脊椎インプラント4100は、矢印で指示するように側方方向に再配置可能である。所望の位置になったら、拡張可能部材は、上記のとおり第2の状態に拡張される。最後に、図62Fで示すように、拡張ツール4130は、バルブ4132から取り外される。
At this point, the
図63は、第2構成において隣接する棘突起S間に挿入された図62A〜図62Fに示す脊椎インプラント4100の側面図である。図63は、拡張可能部材4102の近位の保持部分4114のみ示しているが、遠位の保持部分4116は、近位の保持部分4114に関する以下の説明に類似する特性および機能を有すると考えるべきである。図示のとおり、近位の保持部分4114は、棘突起S間の垂直距離D1より大きいサイズS1を有する。このようにして、近位の保持部分4114および保持部分4116は、上記のとおり、第2構成にある場合の脊椎インプラント4100の側方移動を制限する。
FIG. 63 is a side view of the
図64は、隣接する棘突起間に挿入され、第2構成における本発明の一実施態様による脊椎インプラント4200の側面図である。上記の脊椎インプラント4100と同様、脊椎インプラント4200は、拡張可能部材4202およびバルブ4232を備える。拡張可能部材4202は、支持部分(図示しない)、近位の保持部分4214、および遠位の保持部分(図示しない)を有する。拡張可能部材4202は、第1構成、第2構成、および/または第3構成において繰り返し再配置可能である。各々の構成では、拡張可能部材4202は、上記のとおり対応する容積を有する。
FIG. 64 is a side view of a
図示の実施態様では、拡張可能部材4202の近位の保持部分4214は、第1の半径方向延在部分4236、第2の径方向延在部分4238、および第3の半径方向延在部分4240を有する。図示のとおり、半径方向延在部分の両端間の距離S1は、棘突起S間の垂直距離D1の距離より大きい。このようにして、近位の保持部分4214および遠位の保持部分は、第2構成にある場合の脊椎インプラント4200の側方移動を制限する。実施態様によっては、近位の保持部分および遠位の保持部分は、多様な異なる形状を取ることが可能である。
In the illustrated embodiment, the
図65Aおよび図65Bは、それぞれ第1構成および第2構成における本発明の一実施態様による脊椎インプラント4300の前面図である。脊椎インプラント4300は、近位の拡張可能部材4304、遠位の拡張可能部材4306、支持部材4308、センサ4312、およびバルブ4332を備える。支持部材4308は、内側領域(図示しない)および外面4310を有する。外面4310は、棘突起(図示しない)に接触するように構成される。実施態様によっては、支持部材4308は隣接する棘突起を伸延させる。他の実施態様では、支持部材4308は、隣接する棘突起を伸延させない。さらに他の実施態様では、支持部材4308は連続的に棘突起に係合するのではなく、脊椎の伸展後に係合する。
65A and 65B are front views of a
支持部材4308は、近位の拡張可能部材4304が結合される近位部分4324、および遠位の拡張可能部材4306が結合される遠位部分4326を有する。近位の拡張可能部材4304、および遠位の拡張可能部材4306は各々、第1構成(図65A)および第2構成(図65B)においいて繰り返し再配置可能である。上記のとおり、第1構成は、近位の拡張可能部材4304および遠位の拡張可能部材4306の各々が最小容積を有する実質的に収縮状態を表す。脊椎インプラント4300は、第1構成にある場合、挿入、再配置および/または取り外しが可能である。図示の実施態様では、近位の拡張可能部材4304、および遠位の拡張可能部材4306の各々は、脊椎インプラント4300が第1構成にある時に、支持部材4308の内側領域内に収容される。実施態様によっては、近位の拡張可能部材4304、および遠位の拡張可能部材4306は、支持部材4308内に収容されない。
逆に、第2構成は、近位の拡張可能部材4304および遠位の拡張可能部材4306の各々が大きい容積を有する拡張状態を表す。脊椎インプラント4300が第2構成にある場合、近位の拡張可能部材4304および遠位の拡張可能部材4306は各々、上記のとおり棘突起間の垂直距離より大きいサイズを有する。このようにして、近位の拡張可能部材4304および遠位の拡張可能部材4306は棘突起に係合し、その結果、脊椎インプラント4300の側方移動を制限する。
Conversely, the second configuration represents an expanded state in which the proximal
近位の拡張可能部材4304および遠位の拡張可能部材4306は、流体(図示しない)を各々の拡張可能部材4304、4306の外側の領域から、各々の拡張可能部材4304、4306によって画定される内側領域に搬送することによって第2構成で拡張する。流体は、上記のとおりバルブ4332を通って搬送される。図示の実施態様では、近位の拡張可能部材4304の内側領域、遠位の拡張可能部材4306の内側領域、および支持部材4308の内側領域は、互いに流体連通して、単一の内側領域を形成する。したがって、流体は、単一バルブ4332によって、近位の拡張可能部材4304の内側領域および遠位の拡張可能部材4306の内側領域の両方に搬送することができる。実施態様によっては、近位の拡張可能部材4304および遠位の拡張可能部材4306の内側領域は流体連通しない。こうした構成では、各々の拡張可能部材は、各々の構成間で別個に変形する。
Proximal
支持部材4308は、任意の数の生体適合性材料、たとえば、ステンレス鋼、プラスチック、ポリエーテルエーテルケトン(PEEK)、カーボンファイバ,超高分子(UHMW)ポリエチレンなどから製造することができる。支持部材4308の材料は、骨の引っ張り強さと同等、またはそれ以上の引っ張り強さを有することができる。実施態様によっては、支持部材4308は実質的に剛性である。他の実施態様では、支持部材4308またはその一部は弾性変形し、その結果、棘突起の形状に適合することが可能である。さらに他の実施態様では、支持部材4308は、挿入および/または再配置の際の脊椎インプラント4300の位置の追跡を容易にするために、ビスマスなどの放射線不透過性材料を含む。
The
近位の拡張可能部材4304および遠位の拡張可能部材4306は、上記のとおり、任意の数の生体適合性材料から製造することができる。近位の拡張可能部材4304および遠位の拡張可能部材4306は、生体適合性接着剤などの任意の適切な手段によって支持部材に結合することができる。
Proximal
図示の実施態様では、脊椎インプラント4300は、支持部材4308に結合されるセンサ4312を備える。上記のとおり、センサ4312は、近位の拡張可能部材4304および遠位の拡張可能部材4306内に収容される流体の複数の力の量および/または圧力を測定するように構成することができる。
In the illustrated embodiment,
もう1つの実施態様では、この装置は、支持部材、近位の保持部材、および遠位の保持部材を備える。支持部材は、隣接する棘突起間に配置するように構成される。近位の保持部材は、近位の保持部材が実質的に支持部材の近位部分内に配置される第1構成と、近位の保持部材の一部分が、支持部材の外側に配置される第2構成とを有する。遠位の保持部材は、遠位の保持部材が、実質的に支持部材の遠位部分内に配置される第1構成と、遠位の保持部材の一部分が支持部材の外側に配置される第2構成とを有する。 In another embodiment, the device includes a support member, a proximal retention member, and a distal retention member. The support member is configured to be disposed between adjacent spinous processes. The proximal retention member includes a first configuration in which the proximal retention member is disposed substantially within the proximal portion of the support member and a first configuration in which a portion of the proximal retention member is disposed outside the support member. It has two configurations. The distal retaining member includes a first configuration in which the distal retaining member is disposed substantially within the distal portion of the support member, and a first configuration in which a portion of the distal retaining member is disposed outside the support member. It has two configurations.
実施態様によっては、近位の保持部材および遠位の保持部材の各々は、第1長形部材および第2長形部材を備える。第2長形部材は、第1長形部材内で摺動可能に配置されるように構成される。支持部材は、複数の開口部を画定する側壁を備え、各々の開口部は、開口部を通して第1長形部材または第2長形部材の少なくとも一方の一部分を収容するように構成される。 In some embodiments, each of the proximal retention member and the distal retention member comprises a first elongated member and a second elongated member. The second elongated member is configured to be slidably disposed within the first elongated member. The support member includes a sidewall defining a plurality of openings, each opening configured to receive a portion of at least one of the first elongate member or the second elongate member through the openings.
実施態様によっては、近位の保持部材および遠位の保持部材の各々は、長手方向軸を有する長形部材と、長形部材の長手方向軸に垂直な長手方向軸を有する回転部材とを備える。長形部材の一部分は、長手方向軸に垂直な方向に可撓性である。回転部材は長形部材に結合され、長手方向軸の周囲で回転するように構成され、その結果、長手方向軸に沿って長形部材を移動させる。 In some embodiments, each of the proximal retaining member and the distal retaining member comprises an elongate member having a longitudinal axis and a rotating member having a longitudinal axis perpendicular to the longitudinal axis of the elongate member. . A portion of the elongated member is flexible in a direction perpendicular to the longitudinal axis. The rotating member is coupled to the elongated member and is configured to rotate about the longitudinal axis, thereby moving the elongated member along the longitudinal axis.
実施態様によっては、方法は、隣接する棘突起間に配置されるように構成された支持部材を、経皮的に体内に挿入するステップを含む。支持部材は、内側領域、および内側領域および支持部材の外側の領域を接続する長手方向軸に実質的に垂直な開口部を画定する。支持部材は、保持部材が実質的に内側領域に配置される第1構成と、保持部材の一部分が、開口部を通して支持部材の外側の領域に配置される第2構成とを含む。支持部材は、保持部材が第1構成にある時に、隣接する棘突起間の位置に配置される。保持部材は、前記第1構成から前記第2構成に移動する。 In some embodiments, the method includes percutaneously inserting a support member configured to be positioned between adjacent spinous processes into the body. The support member defines an inner region and an opening substantially perpendicular to the longitudinal axis connecting the inner region and the outer region of the support member. The support member includes a first configuration in which the holding member is disposed substantially in the inner region, and a second configuration in which a portion of the holding member is disposed in the outer region of the support member through the opening. The support member is disposed at a position between adjacent spinous processes when the holding member is in the first configuration. The holding member moves from the first configuration to the second configuration.
装置の特定の部分、たとえば1つまたは複数の保持部材は、分かりやすくするために、第1構成、第2構成および/または第3構成間を移動するように構成されるが、装置全体を第1構成、第2構成、および/または第3構成と呼ぶ場合がある。しかし、この開示事項の長所を得ている当業者は、装置は、4つ以上の構成を有するように構成されることを理解するであろう。さらに、実施態様によっては、装置は、第1構成、第2構成、および/または第3構成間を移動する際に、多くの位置を取ることが可能である。分かりやすくするために、装置は、第1構成、第2構成または第3構成として説明する。最後に、実施態様によっては、装置は、1つまたは複数の保持部材を備えるが、図面および付随する説明は、単一の保持部材のみを示し、説明する。このような場合、単一の保持部材の説明は、実施態様に含まれるその他のいくつかまたはすべての保持部材に適用されると考えるべきである。 Certain parts of the device, such as one or more retaining members, are configured to move between the first configuration, the second configuration, and / or the third configuration for clarity, but the entire device is It may be referred to as a first configuration, a second configuration, and / or a third configuration. However, one of ordinary skill in the art having the benefit of this disclosure will appreciate that the device is configured to have more than three configurations. Further, in some implementations, the device can take many positions as it moves between the first configuration, the second configuration, and / or the third configuration. For the sake of clarity, the apparatus will be described as a first configuration, a second configuration, or a third configuration. Finally, in some embodiments, the apparatus comprises one or more holding members, but the drawings and accompanying description show and describe only a single holding member. In such cases, the description of a single holding member should be considered to apply to some or all other holding members included in the embodiments.
図66Aおよび図66Bは、それぞれ第1構成および第2構成の2つの隣接する棘突起S間に配置された本発明の一実施態様による医療デバイス3000の略背面図である。医療デバイス3000は、支持部材3002、近位の保持部材3010、および遠位の保持部材3012を備える。支持部材3002は、近位部分3004および遠位部分3006を有し、棘突起S間に配置されて、棘突起Sの過剰伸張/圧縮を防止するように構成される。実施態様によっては、支持部材3002は、隣接する棘突起Sを伸延させる。その他の実施態様では、支持部材3002は隣接する棘突起Sを伸延させない。
66A and 66B are schematic rear views of a
近位の保持部材3010は、図66Aに示すように、実質的に支持部材3002の近位部分3004内に配置される第1構成を有する。同様に、遠位の保持部材3012は、実質的に支持部材3002の遠位部分3006内に配置される第1構成を有する。近位の保持部材3010および遠位の保持部材3012が各々、それぞれの第1構成にある場合、医療デバイス3000は、隣接する棘突起S間に配置することが可能である。
近位の保持部材3010は、その一部分が、第1構成から、図66Bに示す支持部材3002の外側に配置される第2構成に移動することができる。同様に、遠位の保持部材3012は、第1構成から第2構成に移動可能である。近位の保持部材3010および遠位の保持部材3012は、それぞれの第2構成にある場合、棘突起Sに接触することによって(つまり直接、または周囲の組織を介して)、棘突起Sに対する支持部材3002の側方移動を制限する。分かりやすくするため、棘突起Sを囲む組織は図示しない。
Proximal retaining
使用の際、隣接する棘突起Sは、医療デバイス3000を患者の体内に挿入する前に、伸延させることができる。棘突起Sが伸延すると、トロカール(図66Aまたは図66Bに示さない)を使用して、医療デバイス3000の接近通路(図66Aまたは図66Bに示さない)を画定することができる。実施態様によっては、トロカールは、通路を画定すると共に、棘突起Sを伸延させるために使用することができる。
In use, the adjacent spinous process S can be distracted prior to inserting the
接近通路が画定されると、医療デバイス3000は、最初に遠位部分3006を棘突起Sの間に経皮的に挿入されて前進する。医療デバイス3000は、棘突起Sの側部から挿入することができる(つまり、後部−側部接近)。曲線シャフトを使用することによって、棘突起Sに対する側方接近の使用が促進される。医療デバイス3000が、棘突起S間の所定の位置に配置されたら、近位の保持部材3010および遠位の保持部材3012は、連続的または同時にそれぞれの第2構成に移動する。このようにして、棘突起Sに対する支持部材3002の側方移動は制限される。
Once the access passage is defined, the
医療デバイス3000の位置を変えることが望ましい場合、近位の保持部材3010および遠位の保持部材3012は、第1構成に戻り、その結果、支持部材3002が側方に移動することを可能にする。支持部材3002が再配置されると、医療デバイス3000は第2構成に戻ることが可能である。同様に、医療デバイス3000を取り外すことが望ましい場合、近位の保持部材3010および遠位の保持部材3012を第1構成から第2構成に移動させ、それによって支持部材3002を取り外すことが可能になる。
If it is desirable to change the position of the
実施態様によっては、医療デバイス3000は、経皮的に(つまり、皮膚の開口部を通して)最小限侵襲的な方法で挿入される。たとえば、本明細書で詳細に説明するとおり、医療デバイス3000の各部分全体のサイズは、医療デバイス3000が隣接する棘突起S間に挿入された後、近位の保持部材3010および遠位の保持部材3012をそれぞれの第2構成に移動させることによって増加させることができる。第2構成で拡張された時、医療デバイス3000の各部分のサイズは、開口部のサイズより大きくて良い。たとえば、皮膚の開口部/切開部のサイズは、開口部を横断して長さ3mm〜25mmで良い。実施態様によっては、拡張した第2構成における医療デバイス3000のサイズは、開口部を横断して3mm〜25mmである。
In some embodiments, the
図67A、図67B、図68〜図71は、本発明の一実施態様による脊椎インプラント3100を示す。図67Aおよび図67Bは、それぞれ第1構成および第2構成における脊椎インプラント3100の斜視図である。脊椎インプラント3100は、支持部材3102、近位の保持部材3110、および遠位の保持部材3112を備える。支持部材3102は、図68および図69に示すように、隣接する棘突起S間に配置される。図67、および図67Bに示すように、近位の保持部材3110および遠位の保持部材3112は各々、実質的に支持部材3102内に配置される第1構成(図67A)、および各々の保持部材3110、3112の一部分が、支持部材3102の外側に配置される第2構成(図67B)に繰り返し配置可能である。脊椎インプラント3100は、第1構成にある場合、隣接する棘突起S間に挿入し、隣接する棘突起間に再配置するか、および/または患者から取り外すことが可能である。脊椎インプラント3100は、第2構成にある場合は側方移動が制限され、それによって支持部材3102の所望の位置を維持することができる。
67A, 67B, 68-71 illustrate a
実施態様によっては、支持部材3102は、隣接する棘突起Sを伸延させる。他の実施態様では、支持部材3102は隣接する棘突起Sを伸延させない。さらに他の実施態様では、支持部材3102は連続的に棘突起Sに係合するのではなく、脊椎の伸展後に係合する。
In some embodiments,
支持部材3102は、任意の生体適合性材料、たとえばステンレス鋼、プラスチック、ポリエーテルエーテルケトン(PEEK)、カーボンファイバ,超高分子(UHMW)ポリエチレンなどから製造することができる。支持部材3102の材料は、骨の引っ張り強さと同等、またはそれ以上の引っ張り強さを有することができる。実施態様によっては、支持部材3102は実質的に剛性である。その他の実施態様では、支持部材3102またはその一部は弾性的に変形可能であり、それによって棘突起の形状に適合することが可能である。さらに他の実施態様では、支持部材3102は、挿入および/または再配置の際に、脊椎インプラント3100の位置の追跡を容易にするために、ビスマスなどの放射線不透過性材料を含む。
The
図示の実施態様では、脊椎インプラント3100は、支持部材3102に結合されるセンサ3124を備える。実施態様によっては、センサ3124は、支持部材3102に加わる力を測定する歪ゲージセンサである。実施態様によっては、センサ3124は、圧縮力および/または曲げモーメントなど、複数の力の量を容易に測定するため、複数の歪ゲージを備えることができる。他の実施態様では、センサ3124は、支持部材3102に加わる力および/または圧力を測定するように構成された可変キャパシタンスタイプの圧力センサである。さらに他の実施態様では、センサ3124は、支持部材3102に加わる力および/または圧力を測定する圧電センサである。さらに他の実施態様では、脊椎インプラント3100は、支持部材3102に加わる力および/または圧力の空間プロファイルを提供するため、様々な位置に配置される複数のセンサを備えることができる。この方法では、施術者は、脊椎インプラントの緩みなどを生じる恐れがある患者の状態の変化を検出することができる。
In the illustrated embodiment,
実施態様によっては、センサ3124は、外部の誘導デバイスによって遠隔制御することが可能である。たとえば、外部無線周波数(RF)送信機(図示しない)を使用して、センサ3124に電力を供給し、センサ3124と通信することができる。その他の実施態様では、外部音響信号送信機(図示しない)を使用して、センサ3124に電力を供給し、センサ3124と通信することができる。このような構成では、たとえば、センサは、圧力を測定するための上記のタイプの圧力センサと、音響トランスデューサと、エネルギー蓄積デバイスとを備えることができる。音響トランスデューサは、電気エネルギーと音響エネルギーとの間でエネルギーを変換する。エネルギー蓄積デバイスは、音響トランスデューサによって変換された電気エネルギーを蓄積し、電気エネルギーを供給して、圧力センサの動作を支援する。このようにして、外部源からの音響エネルギーを受信して、圧力センサに電力を供給するために使用される電気エネルギーに変換することが可能である。同様に、圧力センサから出力される電気信号は、音響エネルギーに変換され、外部源に送信することが可能である。
In some embodiments,
支持部材3102は、内側領域3120と、この内側領域3120を支持部材3102の外側の領域に接続する複数の開口部3114を画定する側壁3108を備える。脊椎インプラント3100が第1構成にある場合、近位の保持部材3110および遠位の保持部材3112は、図67Aに示すように、実質的に支持部材3102の内側領域3120内に配置される。脊椎インプラント3100が第2構成にある場合、各々の近位の保持部材3110および遠位の保持部材3112の一部分は、開口部3114を通って、支持部材3102の外側の領域に延在する。第2構成では、近位の保持部材3110および遠位の保持部材3112は隣接する棘突起と係合し、それによって脊椎インプラント3100の側方移動を制限する。
The
近位の保持部材3110は、第1長形部材3130および第2長形部材3132を備える。同様に、遠位の保持部材3112は、第1長形部材3131および第2長形部材3133を備える。支持部材3102の近位部分3104の断面平面図を示す図71に示すように、第1長形部材3130は、第2長形部材3132によって画定されるポケット3134内に摺動可能に配置される。ばねまたは弾性部材などの付勢部材3136は、ポケット3134内に配置され、第1長形部材3130および第2長形部材3132に結合される。このようにして、保持部材は、第2構成に付勢することが可能である。他の実施態様では、付勢部材3136は、保持部材を第1構成に付勢するように構成することができる。さらに他の実施態様では、保持部材は付勢部材を備えず、代わりに所望の構成を維持するためのその他の機構を使用する。このような機構としては、たとえば、保持部材が所望の構成にある時に、係止可能に係合するように構成される嵌合タブおよびスロットが挙げられる。
使用の際、脊椎インプラント3100は、挿入、取り外しまたは再配置の際に、第1構成で配置される。上記のとおり、脊椎インプラント3100は、経皮的に隣接する棘突起間に挿入される。支持部材3102の遠位部分3106は最初に挿入されて棘突起を通過し、支持部材3102は棘突起間に配置される。支持部材3102は、棘突起Sを囲む靭帯および組織を考慮してサイズを決めることができる。実施態様によっては、支持部材3102は棘突起に接触し、棘突起Sの移動範囲の一部分において棘突起間に配置される。実施態様によっては、脊椎インプラント3100の支持部材3102は一定サイズであり、圧縮または拡張可能ではない。さらに他の実施態様では、支持部材3102は圧縮し、棘突起Sの形状に適合することが可能である。同様に、実施態様によっては、近位の保持部材3110および遠位の保持部材3112は実質的に剛性である。他の実施態様では、保持部材またはその一部は弾性的に変形可能であり、その結果、棘突起の形状に適合することが可能である。
In use, the
図示の実施態様では、脊椎インプラント3100は、付勢部材3136によって加わる力を克服する挿入ツール(図示しない)によって、第1構成に保持され、それによって第1長形部材3130の一部分を第2長形部材3132のポケット3134内に配置する。このようにして、脊椎インプラント3100は、前記第1構成から前記第2構成に繰り返し移動することができ、それによって経皮的に再配置するか、および/または取り外すことが可能である。図70に示すように、第1長形部材3130および第2長形部材3132は各々、挿入ツールの一部分を収容するように構成されたノッチ3138を備える。挿入ツールが解放されると、付勢部材3136は自由に延在し、それによって第1長形部材3130の一部分を第2長形部材3132のポケット3134から変位させる。このようにして、第1長形部材3130および第2長形部材3132の一部は、隣接する開口部3114を通って、支持部材3102の外側の領域に延在する。実施態様によっては、近位の保持部材3110および遠位の保持部材3112は、それぞれ第1構成および第2構成間を同時に遷移する。他の実施態様では、近位の保持部材3110および遠位の保持部材3112は、第1構成および第2構成間を連続的に遷移する。
In the illustrated embodiment, the
図示のとおり、第1長形部材3130および第2長形部材3132は各々、1つまたは複数のタブ3140を備え、このタブ3140は、第2構成にある時に、支持部材3102の側壁3108に係合し、それによって第1および第2長形部材が互いに結合した状態を保ち、第1および第2長形部材の各部分が支持部材3102内に適切に配置されることを確実にする。他の実施態様では、第1長形部材3130および第2長形部材3132は、保持部材が予め決められた拡張限界に達した時に係合するように構成された嵌合タブおよびスロットなど、その他の適切な機構によって互いに結合される。
As shown, the first
図72、図73Aおよび図73Bは、本発明の一実施態様による脊椎インプラント3200の断面図である。図72は、第2構成における脊椎インプラント3200の前断面図を示し、図73Aおよび図73Bは、それぞれ第2構成および第1構成における脊椎インプラント3200の断面平面図を示す。図示された脊椎インプラント3200は、支持部材3202、保持部材3210、および回転部材3250を備える。単一の保持部材3210のみを備えるように示され、説明されているが、実施態様によっては、保持部材3210に関する場合に類似する特性および機能を有する1つまたは複数の追加の保持部材を備えることができる。
72, 73A and 73B are cross-sectional views of a
図73Aおよび図73Bに示すように、保持部材3210は、実質的に支持部材3202内に配置される第1構成、および保持部材3210の一部分が支持部材3102の外側に配置される第2構成に繰り返し配置可能である。脊椎インプラント3200は、第1構成の場合、隣接する棘突起間に挿入され、隣接する棘突起間に再配置されるか、および/または患者から取り外される。脊椎インプラント3200は、第2構成の場合、側方移動が制限され、その結果、支持部材3202の所望の位置を維持することが可能である。
As shown in FIGS. 73A and 73B, the holding
支持部材3202は、内側領域3220と、この内側領域3220を支持部材3202の外側の領域に接続する複数の開口部3214を画定する側壁3208とを備える。脊椎インプラント3200が第1構成にある場合、保持部材3210は、図73Bに示すように、実質的に支持部材3202の内側領域3220内に配置される。脊椎インプラント3200が第2構成にある場合、近位の保持部材3210の一部分は、開口部3214を通って、支持部材3202の外側の領域に延在する。第2構成では、保持部材3210は、棘突起に隣接して配置され、それによって脊椎インプラント3200の側方移動を制限する。
The
保持部材3210は、2つの端部分3244と、中心部分3242と、長手方向軸L1(図72に示す)とを有する長形部材3228を備える。長形部材3228の一部分は可撓性であり、以下に記載するとおり、回転部材3250に沿って巻き付けることができる。実施態様によっては、長形部材3228、回転部材3250に沿って巻き付けるのに十分に可撓性であると共に、第2構成に配置された時に、支持部材3202の側方移動を制限するのに十分に剛性であるように一体成形される。他の実施態様では、長形部材3228は、互いに結合されて長形部材3228を形成する別個の構成要素を備える。たとえば、長形部材3228の中心部分3242は、可撓性が比較的大きい別個の構成要素であるが、端部分3244は、剛性が比較的大きい別個の構成要素であって良い。
The retaining
図示の実施態様では、長形部材3228は、第2構成にある時に支持部材3202の側壁3208に係合し、それによって長形部材3228が、支持部材3202の外側全体に自由に延在しないようにする。他の実施態様では、長形部材3228の一部分は、他の適切な機構によって支持部材3202内に保持される。たとえば、長形部材3228の中心部分3242の幅は、開口部3214の幅より大きく、その結果、長形部材3228の一部分は支持部材3202内に留まる。
In the illustrated embodiment, the
回転部材3250は、外面3252と、長形部材3228が通過して配置されるスロット3254を画定する。回転部材3250は、回転部材3250が周囲を回転する長手方向軸L2(図72に示す)を有する。図73Bに示すように、回転部材3250が回転すると、長形部材3228は、回転部材3250の外面3252に沿って巻かれる。その結果、長形部材3228は長手方向軸L1に沿って移動し、長形部材3228の端部分3244は、開口部3214を通って内側に収縮する。このようにして、保持部材3210は、第1構成と第2構成との間で繰り返し遷移することができる。
Rotating
実施態様によっては、回転部材3250は、ラチェット機構を備える挿入ツール(図示しない)を使用して回転する。挿入ツールは、たとえば手動、空気圧または電子的など、多くの異なる方法で回転部材3250を回転させることが可能である。
In some embodiments, the rotating
図74および図75A〜図75Cは、本発明の一実施態様による脊椎インプラント3300の断面図である。図74は、第2構成の脊椎インプラント3300の前断面図を示し、図75A〜図75Cは、それぞれ第2構成、第1構成、および第3構成における脊椎インプラント3300の断面平面図を示す。図示の脊椎インプラント3300は、支持部材3302および保持部材3310を備える。1つの保持部材3310のみを図示および説明しているが、実施態様によっては、保持部材3310の場合に類似する特性および機能を有する1つまたは複数の追加の保持部材を備えることができる。
74 and 75A-75C are cross-sectional views of a
図75A〜図75Cに示すように、保持部材3310は、第1構成、第2構成、および第3構成に繰り返し配置可能である。保持部材3310の一部分は、第2構成に配置された場合、支持部材3302の外側に配置される。保持部材3310は、第1構成および第3構成のそれぞれに配置された場合、実質的に支持部材3202内に配置される。図75Bおよび図75Cに示すように、保持部材3310の向きは、第1構成と第3構成とで異なる。このようにして、脊椎インプラント3300の位置は、脊椎インプラント3300が移動する方向に応じて、適切に位置付けることができる。たとえば、脊椎インプラント3300は、支持部材3302が、挿入時などに遠位の方向に容易に側方移動するように、第1構成に配置することができる。逆に、脊椎インプラント3300は、取り外しの際などに、支持部材3302を近位の方向に容易に側方移動するように、第3構成に配置することができる。
As shown in FIGS. 75A to 75C, the holding
支持部材3302は、内側領域3320と、この内側領域3320を支持部材3302の外側の領域に接続する複数の開口部3314を画定する側壁3308を備える。脊椎インプラント3300が第2構成にある場合、近位の保持部材3300の一部分は、開口部3314を通過して、支持部材3302の外側の領域に延在する。
The
保持部材3310は、第1長形部材3330、第2長形部材3332、および長手方向軸L2(図示しない)を有するヒンジ3360を備える。第1長形部材3330および長形部材3332の各々は、脊椎インプラント3300が第2構成にある時に、開口部3314を通って延在する遠位の端部分3344と、ヒンジ3360に枢着される近位の端部分3346とを有する。使用の際、ヒンジ3360は、図75Bおよび図75Cに矢印で指示するように、長手方向軸L2に垂直な方向に移動する。ヒンジの運動は、支持部材3302の側壁3308によって画定されるスロット3362によって案内される。ヒンジ3360の運動は、第1長形部材3330および第2長形部材3332の各々を、ヒンジ3360の長手方向軸L2の周囲で回転させ、それによって各々の長形部材の遠位の端部分3344を実質的に支持部材3302の内側領域3320内に配置することを可能にする。
The retaining
実施態様によっては、スロット3362は、ヒンジ3360を所望の位置に保持するのに適する戻り止めまたは任意のその他の適切な機構(図示しない)を備える。他の実施態様では、ヒンジ3360は、ヒンジ3360を第1構成、第2構成、または第3構成の何れかに付勢するように構成される付勢部材(図示しない)を備える。さらに他の実施態様では、長形部材は、保持部材を所望の構成に保持するのに適する機構を備える。このような機構としては、たとえば、長形部材が所望の構成にある時に、係止可能に係合するように構成された嵌合タブおよびスロットが挙げられる。
In some embodiments,
実施態様によっては、第1長形部材3330および第2長形部材3332は、実質的に剛性の材料から一体成形される。他の実施態様では、第1長形部材3330および第2長形部材3332は、異なる材料特性を有する別個の構成要素を備える。たとえば、遠位の端部分3344は、可撓性が比較的大きい材料から成形し、近位の端部分3346は、実質的に剛性の材料から成形することができる。このようにして、脊椎インプラント3300の移動は、遠位の端部分3344の一部分が、第1構成または第3構成において開口部3314から突出する場合は制限されない。
In some embodiments, the first
図76Aおよび図76Bは、本発明の一実施態様による脊椎インプラント3400の前断面図である。図示の脊椎インプラント3400は、支持部材3402、保持部材3410、および回転部材3450を備える。図76Aおよび図76Bに示すように、保持部材3410は、実質的に支持部材3402内に配置される第1構成、および保持部材3410の一部分が支持部材3402の外側に配置される第2構成に繰り返し配置可能である。1つの保持部材3410のみを図示および説明しているが、実施態様によっては、保持部材3410の場合と類似する特性および機能を有する1つまたは複数の追加の保持部材を備える。
76A and 76B are front cross-sectional views of a
支持部材3402は、内側領域3420、およびこの内側領域3420を支持部材3402の外側の領域に接続する複数の開口部3414を画定する側壁3408を備える。脊椎インプラント3400が第2構成にある場合、近位の保持部材3410の一部分は、開口部3414を通って支持部材3402の外側の領域に延在する。
保持部材3410は、第1長形部材3430および第2長形部材3432を備え、各々が、脊椎インプラント3400が第2構成にある時に、開口部3414を通って延在する遠位の端部分3444と、近位の端部分3446と、長手方向軸L1とを有する。図示のとおり、近位の端部分3346は、ばねまたは弾性バンドなどの2つの弾性部材3468によって結合される。実施態様によっては、近位の端部分3346は、1つの弾性部材によって結合される。その他の実施態様では、近位の端部分3346は、回転部材3450を介して間接的に結合される。このような構成では、たとえば、付勢部材は、支持部材の側壁と各々の長形部材との間に配置することができ、それによって各々の長形部材を回転部材に対して付勢する。
The
図示の実施態様では、長形部材の各々は、第2構成にある時に、支持部材3402の側壁3408に係合し、それによって長形部材3430、3432が支持部材3402の完全に外側に自由に延在しないようにする1つまたは複数のタブ3440を備える。他の実施態様では、長形部材はタブを備えないが、弾性部材3468によって完全に支持部材3402内に保持される。さらに他の実施態様では、長形部材の一部分の幅は開口部3414の幅より大きくすることができ、それによって長形部材が支持部材3402内に保持される。
In the illustrated embodiment, each of the elongate members engages the
回転部材3450は、偏心形を有する外面3452を画定し、回転部材3450が周囲で回転する長手方向軸(図示しない)を備える。図76Aおよび図76Bに示すように、回転部材3450が長手方向軸周囲で回転すると、第1長形部材3430および第2長形部材3432の近位の端部分3446の一部分は、回転部材3250の外面3452に係合する。その結果、第1長形部材3430および第2長形部材3432は、それぞれの長手方向軸L1に沿って移動し、各々の長形部材の端部分3444は、図76Aに矢印で指示するように、開口部3414を通って外側に延在する。このようにして、保持部材3410は、第1構成と第2構成との間で繰り返し遷移することができる。
Rotating
実施態様によっては、回転部材3450は、ラチェット機構を備える挿入ツール(図示しない)を使用して回転される。挿入ツールは、たとえば手動、空気圧または電子的など、多くの異なる方法で回転部材3450を回転させることが可能である。
In some embodiments, rotating
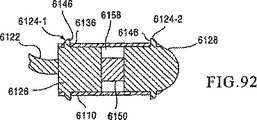
図77および図78は、本発明の一実施態様による脊椎インプラント3500を示す。図77は、第2構成における脊椎インプラント3500の前断面図である。図78は、A−Aに沿って切った脊椎インプラント3500の断面平面図である。脊椎インプラント3500は、支持部材3502および保持部材3510を備える。第2構成つまり拡張構成のみを示しているが、上記の説明から、保持部材3510は、実質的に支持部材3502内に配置される第1構成と、保持部材3510の一部分が支持部材3502の外側に配置される第2構成との間で繰り返し配置可能であると考えるべきである。
77 and 78 illustrate a
図示のとおり、保持部材3510は、第1長形部材3530および第2長形部材3532を備える。第1長形部材3530は、第2長形部材3532によって画定されるポケット3534内に摺動可能に配置される。第1長形部材3530および第2長形部材3532は各々、1つまたは複数の付勢部材3536によって支持部材3502の側壁3508に結合される1つまたは複数のタブ3540を備える。このようにして、保持部材3510は、第1構成つまり収縮構成に付勢される。他の実施態様では、付勢部材3536は、保持部材3510を第2構成に付勢するように構成することができる。さらに他の実施態様では、保持部材3510は付勢部材3536によって保持されるのではなく、他の適切な機構を使用して、所望の構成を維持される。
As illustrated, the holding
使用の際、保持部材3510は、バルブ3570を介して、加圧流体(図示しない)をポケット3534に供給することによって、前記第1構成から前記第2構成に遷移される。流体によって第1長形部材3530および第2長形部材3532の各々に加わる圧力は、付勢部材3536によって加わる力を克服し、それによって第1長形部材3530の一部分は、第2長形部材3132のポケット3534から外側に延在し、その結果、各々の長形部材の一部分が、隣接する開口部3514を通って支持部材3502の外側の領域に延在することを可能にする。同様に、保持部材3510は、バルブ3570を開放し、ポケット3534内の圧力を緩和することによって、第2構成から第1構成に遷移する。このようにして、脊椎インプラント3500は、前記第1構成から前記第2構成に繰り返し移動することができ、それによって経皮的に再配置および/または取り外しが可能になる。
In use, the retaining
図79Aおよび図79Bは、本発明の一実施態様による脊椎インプラント3600のそれぞれの図を示す。脊椎インプラント3600は、支持部材3602、近位の保持部材3610、遠位の保持部材3612、および弾性部材3668を備える。支持部材3602は長手方向軸L1を画定し、内側領域3620を画定する側壁3608を有し、外面3616を有する。図79Bに示すように、外面3616は、長手方向軸L1に垂直な領域Aを画定する。図示のとおり、近位の保持部材3610および遠位の保持部材3612は各々、実質的に領域A内に配置される第1構成(図79B)と、各々の保持部材3610、3612の一部分が領域Aの外側に配置される第2構成(図79A)との間で繰り返し再配置可能である。
79A and 79B show respective views of a
図示のとおり、保持部材3610および遠位の保持部材3612は、弾性部材3668によって結合され、その一部分は、支持部材3602の内側領域3620内に配置される。図示の実施態様では、弾性部材3668は、内腔3676を画定する側壁3674を有する。他の実施態様では、弾性部材は、たとえばばね、弾性バンド、または近位の保持部材3610および遠位の保持部材3612を弾性的に結合するためのその他の任意の適切なデバイスで良い。
As shown, the
近位の保持部材3610は、第1長形部材3630および第2長形部材3632を備え、その各々は、ヒンジ3660によって接続部材3678に枢着される。同様に、遠位の保持部材3612は、第1長形部材3631および第2長形部材3633を備え、その各々は、ヒンジ3660によって接続部材3678に枢着される。
図79Aでは、脊椎インプラント3600が第2構成にある場合、弾性部材3668は、付勢力を各々の接続部材3678に加え、それによって接続部材3678は、支持部材3602に隣接した状態を維持する。この構成では、第1長形部材3630および第2長形部材3632は完全に延在する。脊椎インプラント3600は、接続部材3678を支持部材3602から離して配置することを可能にする弾性部材3668を伸張させることによって、第2構成から第1構成に遷移され、それによって長形部材は、図79Bに示すように領域A内に移動する。支持部材3602は、脊椎インプラント3600を第1構成に維持するように、各々の長形部材の端部分を配置することを可能にするスロット3672を含む。
In FIG. 79A, when the
弾性部材3668は、挿入ツール(図示しない)によって伸張され、その一部分は、弾性部材3668の内腔3676内に配置されるように構成することができる。たとえば、挿入ツールの第1部分は、近位の保持部材3610の接続部材3678に係合することができるが、挿入ツールの第2部分は、遠位の保持部材3612の接続部材3678に係合することができる。したがって、このツールは、外側の力を接続部材3678の各々に加えるように構成し、それによって弾性部材3668を伸張させ、脊椎インプラントが第2構成から第1構成に遷移することを可能にする。
The elastic member 3668 can be configured to be stretched by an insertion tool (not shown), a portion of which is disposed within the
脊椎インプラントは、第2構成にある場合、実質的に支持部材から対称に延在する1つまたは複数の保持部材を有するように上記で図示および説明されているが、実施態様によっては、脊椎インプラントは、第2構成において支持部材から非対称に延在する保持部材を備える。たとえば、図80〜図82は、支持部材3702から非対称に延在する近位の保持部材3710および遠位の保持部材3712を備える本発明の一実施態様による脊椎インプラント3700を示す。図80および図81に示すように、近位の保持部材3710および遠位の保持部材3712は各々、実質的に支持部材3702内に配置される第1構成、および各々の一部分が支持部材3702の外側に配置される第2構成に繰り返し配置することが可能である。
While the spinal implant is shown and described above to have one or more retaining members that extend substantially symmetrically from the support member when in the second configuration, in some embodiments, the spinal implant Comprises a holding member extending asymmetrically from the support member in the second configuration. For example, FIGS. 80-82 illustrate a
支持部材3702は、内側領域3720と、この内側領域3720を支持部材の外側の領域に接続する2つの開口部3714を画定する側壁3708を備える。脊椎インプラント3700が第2構成にある場合、近位の保持部材3710の一部分、および遠位の保持部材3712の一部分は、開口部3714を通って、支持部材3702の外側の領域に延在する。
図示の実施態様では、近位の保持部材3710および遠位の保持部材3712は各々、第1端部分3746および第2端部分3744を備える。近位の保持部材3710および遠位の保持部材3712の第1端部分3746は、長手方向軸L1(図77に示す)を有する接続部材3782によって結合される。実施態様によっては、接続部材3782、近位の保持部材3710、および遠位の保持部材3712は、互いに結合されて図示の構造を形成する別個の構成要素である。その他の実施態様では、接続部材3782、近位の保持部材3710、および遠位の保持部材3712は一体成形される。
In the illustrated embodiment, the
接続部材3782は、接続部材3782が周囲で回転する長手方向軸L1を画定する。図示のとおり、接続部材3782が回転すると、近位の保持部材3710および遠位の保持部材3712も回転し、それによって近位の保持部材3710および遠位の保持部材3712の端部分3744が、開口部3714を通って外側に延在する。このようにして、保持部材3210は、第1構成と第2構成との間で繰り返し遷移することができる。
The connecting
実施態様によっては、接続部材3782は、ラチェット機構を備える挿入ツール(図示しない)を使用して回転される。挿入ツールは、たとえば手動、空気圧または電子的など、多くの異なる方法で接続部材3782を回転させることが可能である。
In some embodiments, the connecting
一実施態様では、装置は、第2本体に結合された第1本体を備える。第1本体および第2本体は、集合的に、隣接する棘突起間に配置されるように構成されたインプラントデバイスに解放可能に結合されるように構成される。第1係合部分は第1本体に結合され、第2係合部分は第2本体に結合される。第1係合部分および/または第に係合部分は、インプラントデバイスによって画定される第1開口部内に収容されるように構成される。第1本体は第2本体に対して移動するように構成され、その結果、第1係合部分と第2係合部分との間の距離が第1距離と第2距離との間で移動し、同時にインプラントデバイスの長さは、第1長さと第2長さとの間で移動する。 In one embodiment, the apparatus comprises a first body coupled to the second body. The first body and the second body are collectively configured to be releasably coupled to an implant device configured to be disposed between adjacent spinous processes. The first engagement portion is coupled to the first body and the second engagement portion is coupled to the second body. The first engagement portion and / or the first engagement portion is configured to be received within a first opening defined by the implant device. The first body is configured to move relative to the second body so that the distance between the first engagement portion and the second engagement portion moves between the first distance and the second distance. At the same time, the length of the implant device moves between a first length and a second length.
もう1つの実施態様では、キットは、隣接する棘突起間に配置されている際に、拡張構成と圧潰構成との間で再構成可能であるインプラントを備える。インプラントは長手方向軸を有し、開口部を画定する。展開ツールは、インプラントに解放可能に結合されるように構成される。展開ツールは、インプラントの開口部内に取り外し可能に収容され、展開ツールがインプラントに結合されている時に、長手方向軸に対して横断方向に延在するように構成される係合部分を含む。展開ツールは、インプラントが隣接する棘突起間に配置されている際に、インプラントを圧潰構成と拡張構成との間で移動させるように構成される。 In another embodiment, the kit comprises an implant that is reconfigurable between an expanded configuration and a collapsed configuration when placed between adjacent spinous processes. The implant has a longitudinal axis and defines an opening. The deployment tool is configured to be releasably coupled to the implant. The deployment tool includes an engagement portion that is removably received within the opening of the implant and is configured to extend transversely to the longitudinal axis when the deployment tool is coupled to the implant. The deployment tool is configured to move the implant between a collapsed configuration and an expanded configuration when the implant is positioned between adjacent spinous processes.
図83および図84は、2つの隣接する棘突起間に位置する本発明の一実施態様による医療デバイスの略図である。図83は、第1構成の医療デバイスを示し、図84は、第2構成の医療デバイスを示す。医療デバイス6000は、インプラント6010および展開ツール6020を備える。インプラント6010は、遠位部分6012、近位部分6014、および中心部分6016を備える。インプラント6010は、隣接する棘突起S間に挿入されるように構成される。中心部分6016は、隣接する棘突起Sが、その移動範囲で互いの方向に移動する時に、棘突起Sに接触し、棘突起S間に最小間隔を提供し、棘突起Sの過剰伸張/圧縮を防止するように構成される。実施態様によっては、中心部分6016は、実質的に隣接する棘突起Sを伸延させない。他の実施態様では、中心部分6016は、隣接する棘突起Sを伸延させない。インプラント6010および展開ツール6020は各々、患者の背中に挿入され、棘突起の側部から隣接する棘突起間に移動される(つまり、後部−側部接近)。曲線挿入シャフトの使用は、棘突起に対する側部接近の使用に役立つ。
83 and 84 are schematic views of a medical device according to one embodiment of the present invention located between two adjacent spinous processes. FIG. 83 shows a medical device having a first configuration, and FIG. 84 shows a medical device having a second configuration. The
インプラント6010は、近位部分6014、遠位部分6012、および中心部分6016が共通の長手方向軸を共用する圧潰構成を有する。実施態様によっては、近位部分6014、遠位部分6012、および中心部分6016は、一定の内径を有する管を画定する。その他の実施態様では、近位部分6014、遠位部分6012、および中心部分6016は、一定の外径および/または内径を有する管を画定する。さらに他の実施態様では、近位部分6014、遠位部分6012、および/または中心部分6016は、異なる内径および/または外径を有する。
The
インプラント6010は、図84に示すように、圧潰構成から拡張構成に移動可能である。拡張構成では、近位部分6014および遠位部分6012は各々、圧潰構成の場合に比べて大きい外側周囲(たとえば、外径)を有し、近位部分6014および遠位部分6012は各々、中心部分6016より大きい外側周囲(たとえば、外径)を有する。拡張構成では、近位部分6014および遠位部分6012は、棘突起Sに対するインプラント6010の側方移動を制限するように配置される。近位部分6014および遠位部分6012は、拡張構成において、棘突起に係合するように(つまり、直接、または周囲の組織を通して、および隣接する棘突起Sの相対位置に応じて)構成される。分かりやすくするため、棘突起Sの周囲の組織は図示しない。
The
実施態様によっては、近位部分6014、遠位部分6012、および中心部分6016は一体成形される。他の実施態様では、近位部分6014、遠位部分6012、および/または中心部分6016の1つまたは複数は、互いに結合されてインプラント6010を形成する別個の構成要素である。たとえば、近位部分6014および遠位部分6012を一体成形し、中心部分6016は、これらに結合される別個の構成要素で良い。これらの様々な部分は、たとえば摩擦嵌合、溶接、接着剤などによって結合される。
In some embodiments, the
インプラント6010は、展開ツール6020に結合されるように構成される。展開ツール6020は、長形部材6022、および2つ以上の係合部分6024を備える。図83および図84に示す実施態様の場合、2つの係合部分6024−1および6024−2が示されているが、2つを超える係合部分6024を備えることが可能であると考えるべきである。長形部材6022は、第2本体部分6028に結合される第1本体部分6026を備えることができる。実施態様によっては、第1本体部分6026は、第2本体部分6028にねじ結合される。第1本体部分6026および第2本体部分6028は、互いに対して移動するように構成される。たとえば、第1本体部分6026と第2本体部分6028との間のねじ接続は、第1本体部分6026および第2本体部分6028間の距離を増減するために使用することができる。第1本体部分6026および第2本体部分6028は、多様な異なるサイズおよび形状で良いか、同じ形状および/またはサイズで良いか、あるいは互いに異なる形状および/またはサイズで良い。たとえば、実施態様によっては、第1本体部分は、直線遠位端および直線近位端を備え、第2本体部分は、直線近位端および曲線または円形遠位端を備える。曲線遠位端は、展開ツールをインプラントの内腔内に挿入するのに役立ち、医療デバイスを患者の身体の一部分に挿入するのにも役立つ。
第1係合部分6024−1は、第1本体部分6026に結合され、第2係合部分6024−2は、第2本体部分6028に結合することができる。係合部分6024は、たとえば、実質的に矩形、方形、円形、楕円形、半円形、または半月形で良い。係合部分6024は、展開ツール6020の長形部材6022に結合されるばね荷重デバイスで良く、その結果、係合部分6024は、長形部材6022によって画定される長手方向軸Aを横断する位置に付勢されて、長形部材6022の外面から延在する。係合部分6024上に力が加わると、係合部分6024は、実質的に長形部材6022の外面下の位置に移動または圧潰させることができる。係合部分6024は、あるいは、長手方向軸Aを横断し、長形部材6022の外面から延在する位置から、実質的に長形部材6022の外面の下の位置に係合部分6024を移動させるように構成されるアクチュエータ(図示しない)に結合することができる。
The first engagement portion 6024-1 can be coupled to the
図94〜図96は、インプラントおよび展開ツール(医療デバイスとも総称する)を互いに結合し、隣接する棘突起間に挿入する時に、棘突起Sを通過する際の係合部分6024の移動を示す。場合によっては、医療デバイスが挿入されると、インプラントの近位部分から延在する係合部分6024は、棘突起(またはその他の組織)と接触する。係合部分6024が棘突起を通過することを可能にするため、係合部分6024は、下方に移動すると(上記のとおり)、棘突起を通過することができる。図94は、ばね付勢構造を有する係合部分6024を示す。係合部分6024は、医療デバイスが棘突起Sに隣接して挿入される時に、最初に棘突起Sに接触する曲線部分6048を備える。曲線部分6048が棘突起Sに接触すると、係合部分6024は下方に移動して、図95に示すように少なくとも部分的にインプラント6010内に入る。係合部分6024は、係合部分が、ばね(図示しない)の付勢によって、棘突起Sを通過した後、図96に示すように移動して延在位置に戻る(たとえば、インプラント6010の表面から横断方向に延在する)。
94-96 illustrate the movement of the
展開ツール6020は、以下で詳細に説明するとおり、インプラント6010を圧潰構成から拡張構成に、あるいはこの逆に移動させるために使用することができる。第1本体部分6026および第2本体部分6028は、インプラント6010の内腔(図83および図84に示さない)内に少なくとも部分的に挿入するように集合的に構成され、その結果、少なくとも1つの係合部分6024は、インプラント6010によって画定される開口部(図83および図84に示さない)を通って延在する。インプラント6010には、1つまたは複数のこうした開口部が構成され、各々の開口部は、長形部材6022上に配置された係合部分6024を収容するように構成される(たとえば、第1本体部分6026または第2本体部分6028)。インプラント6010によって画定される開口部は、たとえば円形、楕円形、方形、矩形などで良い。図85は、曲線矩形開口部6136を画定するインプラント6110の一実施例であり、図98は、曲線円形開口部6336を画定するインプラント6310を示す。
開口部は、エッジ(図83および図84に示さない)によって少なくとも部分的にインプラント6010上に画定される。展開ツール6020上の係合部分6024は、長形部材6022がインプラント6010の内腔内に挿入された時に、インプラント6010の開口部のエッジに係合または接触するように構成された表面を備える(図83および図84に示さない)。
The opening is at least partially defined on the
使用の際、棘突起Sは、インプラント6010に挿入する前に伸延させることができる。棘突起が伸延すると、トロカールを使用して、インプラント6010用の接近通路を画定することができる。実施態様によっては、トロカールは、通路を画定すると共に、棘突起Sを伸延させるために使用することができる。接近通路が画定されると、最初にインプラント6010の遠位端6012を経皮的に挿入して棘突起間に前進させることができ、中心部分6016は棘突起S間に配置される。実施態様によっては、インプラント6010は、隣接する棘突起間に挿入される前に、展開ツール6020に結合することができる。他の実施態様では、インプラント6010は、展開ツール6020に結合させずに、隣接する棘突起間に挿入することがでできる。後者の構成では、インプラント6010が隣接する棘突起間に配置された後、インプラント6010によって画定される内腔内に展開ツール6020を挿入することができる。
In use, the spinous process S can be distracted prior to insertion into the
インプラント6010が棘突起間の所定の位置に配置され、展開ツール6020がインプラント6010の内腔内の所定の位置に配置されると、インプラント6010は、展開ツール6020を作動させることによって第2構成(つまり、拡張構成)に移動させることができる。たとえば、展開ツール6020がインプラント6010の内腔内に挿入されると、第1本体部分6026は、第2本体部分6028から第1の距離に配置され、第1係合部分6024―1は、図83に示すように、第2係合部分6024−2から第1の距離に配置される。こうして、展開ツール6020は、近位の端部分において作動させることができ(たとえば、ハンドルを回転させることによって)(図83および図84に示さない)、その結果、第1本体部分6026と第2本体部分6028との間のねじ結合によって、第1本体部分6026および第2本体部分6028は互いの方向に移動し、第1本体部分6026は、図84に示すように、第2本体部分6028から第2の距離になる(近くなる)。この移動は、同様に第1係合部分6024−1および第2係合部分6024−2を互いに対してより近い位置に移動させる。たとえば、図83では、第1係合部分6024−1は、第2係合部分6024−2から、図84に示されている第1係合部分6024−1と第2係合部分6024−2との間の距離より大きい位置に配置される。
Once the
第1係合部分6024−1および第2係合部分6024−2が互いに対して移動すると、係合部分6024上の表面(上記のとおり、以下で詳細に説明)は、インプラントによって画定される開口部のエッジ(上記のとおり、以下で詳細に説明)に力を与え、インプラントを圧潰構成から拡張構成に移動させる。 As the first engagement portion 6024-1 and the second engagement portion 6024-2 move relative to each other, the surface on the engagement portion 6024 (described in detail below) is an opening defined by the implant. A force is applied to the edge of the part (as described above in detail below) to move the implant from the collapsed configuration to the expanded configuration.
展開ツール6020は、インプラントが拡張構成に移動した後、展開ツール6020をインプラント6010から取り外すことができるように構成される。インプラントは、棘突起間に無制限に配置された状態を保つか、または必要に応じて取り外すことができる。たとえば、展開ツール6020は、インプラント6010の内腔内に再度挿入し、逆方向に作動させて、インプラント6010を逆に拡張構成から圧潰構成に移動させることができる。圧潰構成では、インプラントは、患者の身体から取り外すか、または棘突起間の新たな位置に再配置可能である。
実施態様によっては、インプラント6010は、経皮的に(つまり、皮膚の開口部を通して)、かつ最小限に侵襲的な方法で挿入される。たとえば、以下に説明するとおり、インプラントの部分のサイズは、インプラントを棘突起間に挿入した後に拡張される。拡張した後は、インプラントの拡張部分のサイズは、開口部のサイズより大きい。たとえば、皮膚の開口部/切開部のサイズは、開口部を横断して長さ3mm〜25mmである。実施態様によっては、拡張構成におけるインプラントのサイズは、開口部を横断して3mm〜25mmである。
In some embodiments, the
図85〜図87は、本発明の一実施態様によるインプラントを示す。インプラント6110は、近位部分6114、遠位部分6112、中心部分6116を備える。インプラント6110は、インプラント6110の外面上の複数の開口部6132も画定する。開口部6132は、インプラント6110によって画定される内腔6158(図92に示す)と流体連通する。開口部6132は、第1エッジ6136および第2エッジ6138によって部分的に画定される。インプラント6110は、遠位部分6112および近位部分6114に配置された拡張可能部分を備える。拡張可能部分6140は、インプラント6110に結合するか、または図97に示すようにインプラント6110と一体成形することができる。図97に示すように、長形のスロット6134は、インプラント6110の外面上に画定することができる。長形スロット6134は、軸方向の力が加わった時に拡張可能部分6140を圧潰することができるように、インプラント6110上に脆弱な領域を形成し、図86に示すように延在部分6142を形成する。
85-87 show an implant according to one embodiment of the present invention.
インプラント6110は、図85に示すように、圧潰構成で隣接する棘突起(図示しない)間に挿入されてから、図86に示すように拡張構成に移動する。次に、インプラント6110は、図87に示すように圧潰構成に戻ることが可能であり、図87は、部分的に圧潰された構成の拡張可能部分6140を示す。図87は、部分的に圧潰された構成を示しているが、実施態様によっては、インプラントは、図85に示すように圧潰構成に戻ることができる。
The
インプラント6110を圧潰構成から拡張構成に、あるいはこの逆に移動させるには、上記のとおり、図88〜図90に示すように、展開ツールを使用すると良い。展開ツール6120は、ハンドル6144に結合された長形部材6122を備える。長形部材6122は、ねじ結合部6150を通して第2本体部分6128に結合された第1本体部分6126を備える。1対の係合部分6124−1は、第1本体部分6126上に配置され、1対の係合部分6124−2は、第2本体部分6128条に配置される。係合部分6124−1および6124−2(係合部分6124として総称する)は、表面6146および円形部分6148を備える。第1本体部分6126と第2本体部分6128との間のねじ結合部6150は、第1本体部分6126および第2本体部分6128を移動させて、第1本体部分6126と第2本体部分6128との間の距離を変えるために使用される。たとえば、図89は、第1本体部分6126と第2本体部分6128との間の第1距離d−1を示し、図90は、第1本体部分6126と第2本体部分6128との間の第2距離d−2を示す。図89および図90に示すように、第1本体部分6126および第2本体部分6128間の距離が変化すると、係合部分6124−2と6124−2との間の距離も変化する。
To move the
使用の際、第1本体部分6126および第2本体部分6128は、インプラント6110の内腔6158内に集合的に配置され、係合部分6124は、図91〜図93に示すように、開口部6132を通り、インプラント6110によって画定される軸Bを横断して延在する。この位置では、係合部分6124の表面6146は、開口部6132のエッジ6136に接触するように構成される。図91および図92は、インプラントが圧潰構成にある時に、インプラント6110の内腔内に配置された第1本体部分6126および第2本体部分6128を示す。この位置では、第1本体部分6126は、第2本体部分6128から第1の距離にあり、係合部分6124−1は、係合部分6124−2から第1の距離にあり、インプラントは第1長さL1を有する。
In use, the
インプラントが、棘突起S間に配置されると、展開ツール6120が作動して、図93に示すように、インプラント6110を拡張構成に移動させることができる。展開ツール6120が作動すると、第1本体部分6126は、第2本体部分6128の接近するように移動し、係合部分6124−1は、係合部分6124−2に接近するように移動する。この状態が生じると、係合部分6124上の表面6146は、開口部6132のエッジ6136に力を加えて、インプラント6110を軸方向に圧縮し、インプラント6110は、図93に示すように第2長さL−2を有する。
Once the implant is placed between the spinous processes S, the
インプラント6110を逆に圧潰構成に移動させるには、展開ツール6120は、係合部分6124の表面6146が対向方向に面して位置し、図102に示すように、インプラント6110のエッジ6138に接触するように構成できるように再構成することができる。実施態様によっては、係合部分6124は、たとえば取り外して、長形部材6122(たとえば、第1本体部分6126および第2本体部分6128)に再結合し、単に同じ係合部分6124を再結合することができる。他の実施態様では、係合部分が対向方向に配置された第2展開ツールを使用することができる。何れの場合も、展開ツールは、上記のとおり、インプラント6110の内腔6158内に挿入され、係合部分6124は、インプラント6110の開口部6132を通って延在し、表面6146はインプラント6110のエッジ6136に接触する。したがって、展開ツール6120は、対向方向に作動し(たとえば、反対方向に回転し)、第1本体部分6126および第2本体部分6128は互いから離れてねじ的に移動する。その際、係合部分6124−1は、係合部分6124−2からさらに離れて移動し、係合部分6124の表面6146は、力を開口部6132のエッジ6138(エッジ6136ではなく)に加え、その結果、インプラント6110を逆に被圧潰構成またはまっすぐな構成に移動させる。したがって、本発明のすべての実施態様に記載されているインプラントは、必要に応じて被圧潰構成と拡張構成との間で繰り返し移動させ、インプラントを所望のとおりに配置するか、または取り外すことができる。
To move the
図99は、本発明のもう1つの実施態様による展開ツールを示す。展開ツール6220は、ねじ結合部6250を通して第2本体部分6228に結合される第1本体部分6226を有する長形部材6222を備える。この実施態様では、展開ツール6220は、4つの係合部分6224の2つの集合(合計8つ)を備える(図99には、6つの係合部分のみ示されている)。第1の集合の係合部分6224−1は、第1本体部分6226に結合され、第2の集合の係合部分6224−2は、第2本体部分6228に結合される。係合部分6224は、第1表面6246および第2表面6252を備える。展開ツール6220がインプラントに結合された時に、第1表面6246は、インプラント上に画定された開口部のエッジ(インプラント6110のエッジ6136など)に接触するように構成され、第2表面6252は、インプラントによって画定される開口部上の対向エッジ(インプラント6110上のエッジ6138など)に接触するように構成される。
FIG. 99 illustrates a deployment tool according to another embodiment of the present invention. The
したがって、この実施態様では、展開ツール6220は、インプラント内に挿入して、インプラントを被圧潰構成と拡張構成との間で移動させるために使用することができ、係合部分6224を再配置するか、または第2の展開ツールを使用する必要はない。インプラントを圧潰構成から拡張構成に移動させるには、展開ツール6220を第1方向に作動させる。インプラントを逆に圧潰構成に移動させるには、展開ツール6220は、反対方向に作動させる(たとえば、反対方向に回転させる)。展開ツール6220を作動させて、インプラントが圧潰構成から拡張構成に移動すると、係合部分6224の表面6246は、開口部のエッジ(たとえば、インプラント6110のエッジ6136)に力を加え、その結果、インプラントは、上記のとおり、軸方向に圧縮される。展開ツール6220が作動して、インプラントが拡張構成から圧潰構成に移動すると、係合部分6224の表面6252は、開口部の対向エッジ(たとえば、インプラント6110上のエッジ6138)に力を加え、その結果、インプラントは、上記のとおり実質的にまっすぐになる。
Thus, in this embodiment, the
図100は、本発明のもう1つの実施態様による展開ツールを示す。展開ツール6420は、上記の展開ツール6220に類似しているが、この実施態様では、2つの係合部分6424の2つの集合のみが存在する点が異なる(合計4つ)。係合部分6424は、係合部分6424が実質的に矩形である点を除いて、係合部分6224に類似している。係合部分6424は、インプラントによって画定される開口部のエッジに接触するように構成された表面6446と、インプラントによって画定された開口部の対向エッジに接触するように構成された表面6452とを備える。
FIG. 100 illustrates a deployment tool according to another embodiment of the present invention. The
図101は、本発明のさらにもう1つの実施態様による展開ツールを示す。展開ツール6520は、上記の実施態様と同様に構成され、同様に機能する。展開ツール6520は、第1本体部分6526および第2本体部分6528を有する長形部材6522を備える。この実施態様では、第1本体部分6526および第2本体部分6528は、上記の実施態様に示すものより小さく、係合部分6524は、上記の場合より細長い第1本体部分6526および第2本体部分6528に結合される。
FIG. 101 illustrates a deployment tool according to yet another embodiment of the present invention. The
本発明の一実施態様によるキットは、上記のとおり、少なくとも1つのインプラントおよび少なくとも1つの展開ツールを備えることができる。たとえば、キットは、1つのインプラントおよび2つの展開ツールを備えることができ、1つの展開ツールは、インプラントを圧潰構成から拡張構成に移動させるように構成され、もう1つの展開ツールは、インプラントを拡張構成から圧潰構成に移動させるために使用するように構成される。別法によると、キットは、本明細書に記載するように、展開ツールの長形部材に解放可能に結合できる複数の係合部分を有する単一展開ツールを備えることができる。たとえば、1つのタイプまたはスタイルの係合部分は、インプラントを圧潰構成から拡張構成に移動させるために使用し、もう1つのタイプまたはスタイルの係合部分は、インプラントを拡張構成から圧潰構成に移動させるために使用することができる。このキットは、多様な形状およびサイズの何れかを有する係合部分を備えることができ、ユーザは、特定の用途に応じて特定の1つまたは複数の係合部分を選択することができる。 A kit according to one embodiment of the invention may comprise at least one implant and at least one deployment tool as described above. For example, the kit can comprise one implant and two deployment tools, one deployment tool configured to move the implant from the collapsed configuration to the expanded configuration, and the other deployment tool expanded the implant. Configured for use to move from a configuration to a collapsed configuration. Alternatively, the kit can comprise a single deployment tool having a plurality of engagement portions that can be releasably coupled to the elongate member of the deployment tool as described herein. For example, one type or style of engagement portion is used to move the implant from the collapsed configuration to the expanded configuration, and another type or style of engagement portion moves the implant from the expanded configuration to the collapsed configuration. Can be used for. The kit can include an engagement portion having any of a variety of shapes and sizes, and a user can select a particular one or more engagement portions depending on the particular application.
図118〜図120は、本発明のもう1つの実施態様によるインプラントを示す。インプラント6610は、遠位部分6612、近位部分6614、および中心部分6616を有する外殻6670を備える。インプラント6610は、図118および図119に示す圧潰構成と、図120に示す拡張構成との間で移動可能である。近位部分6614および遠位部分6612は、インプラント6610が拡張構成にある時に、外殻6670から半径方向に延在する延在部分6642を形成する拡張可能部分を備える。
118-120 illustrate an implant according to another embodiment of the present invention.
インプラント6610は、外殻6670によって画定される内腔6658内に配置される内核6672も備える。内核6672は、外殻6670の中心部分6616に対して、増加した圧縮強度を与えるように構成することができる。実施態様によっては、内核6672は内腔を画定し、他の実施態様では、内核6672は実質的に中実構成を有することが可能である。内核6672は、たとえば摩擦嵌合によって、外殻6670の中心部分6616に結合することができる。内核6672は、実質的に外殻6670の全長に沿って、または外殻6670の長さの一部分のみに沿って内腔6658内に配置される。内核6672はさらに、係合部分6674によって、外殻6670の遠位部分6612に結合される。
The
係合部分6674は、たとえば、インプラント6610を圧潰構成と拡張構成との間で移動させるために使用できるねじ結合部で良い。たとえば、インプラント6610が隣接する棘突起間に配置された場合、デバイスを使用して、係合部分6674を第1方向に回転させると、外殻6610の遠位部分6612の近位の方向に軸方向の力が加わり、遠位部分6612は、近位部分6614方向に引っ張られる。その際、外殻6670は、上記の実施態様の場合のように圧潰されるか、または屈曲し、インプラント6610は拡張構成に移動する。インプラント6610を拡張構成から圧潰構成に移動させるため、係合部分6674を対向方向に回転させて、外殻6610の遠位部分6612の遠位の方向に軸方向の力を加え、遠位部分6612を遠位に移動させ、インプラント6610を圧潰構成に移動させる。
Engagement portion 6684 can be, for example, a screw joint that can be used to move
図103は、本発明の一実施態様による方法を示すフローチャートである。この方法は、6060において、拡張可能部材が圧潰構成にある時に、拡張可能部材を患者の体内の隣接する棘突起間の最初の位置に経皮的に配置する。拡張可能部材は、拡張可能部材によって画定される開口部を通って収容するように構成された係合部分を備える展開ツールに結合される。他の実施態様では、展開ツールは、インプラントが棘突起間に配置された後に、インプラントに結合することができる。インプラントが隣接する棘突起間に配置された後、6062において、拡張可能部材は、圧潰構成から拡張構成に移動することが可能である。その際、展開ツールは、拡張可能部材が隣接する棘突起間に配置されている時に作動することができ、その結果、展開ツールの係合部分は、拡張可能部材の第1位置に力を加え、拡張可能部材は、圧潰構成から拡張構成に移動する。展開ツールが作動して、拡張可能部材が圧潰構成から拡張構成に移動した後、展開ツールは、6064において、拡張可能部材から任意に取り外すことができる。展開ツールが取り外された実施態様では、展開ツールは、その後拡張可能部材内に再度挿入することができる。 FIG. 103 is a flowchart illustrating a method according to an embodiment of the present invention. The method at 6060 places the expandable member percutaneously in an initial position between adjacent spinous processes in the patient's body when the expandable member is in a collapsed configuration. The expandable member is coupled to a deployment tool that includes an engagement portion configured to be received through an opening defined by the expandable member. In other embodiments, the deployment tool can be coupled to the implant after the implant is positioned between the spinous processes. After the implant is positioned between adjacent spinous processes, at 6062, the expandable member can be moved from the collapsed configuration to the expanded configuration. The deployment tool can then be actuated when the expandable member is positioned between adjacent spinous processes so that the engagement portion of the deployment tool applies a force to the first position of the expandable member. The expandable member moves from the collapsed configuration to the expanded configuration. After the deployment tool is activated and the expandable member is moved from the collapsed configuration to the expanded configuration, the deployment tool can optionally be removed from the expandable member at 6064. In embodiments where the deployment tool has been removed, the deployment tool can then be reinserted into the expandable member.
6066では、展開ツールが作動して、インプラントを圧潰構成から拡張構成に移動させた後、展開ツールは再度作動して、係合部分は、拡張可能部材上の第1位置とは異なる拡張可能部材上の第2位置に力を加え、インプラントは拡張構成から圧潰構成に移動する。 At 6066, after the deployment tool is activated to move the implant from the collapsed configuration to the expanded configuration, the deployment tool is activated again and the engaging portion is different from the first position on the expandable member. A force is applied to the upper second position and the implant moves from the expanded configuration to the collapsed configuration.
展開ツールが作動して、拡張可能部材が拡張構成から圧潰構成に移動した後、拡張可能部材は、6068において、第1の位置とは異なる隣接する棘突起間の第2の位置に任意に配置することができる。実施態様によっては、展開ツールが作動して、拡張可能部材が、拡張構成から圧潰構成に移動した後、拡張可能部材は、6070において、任意に患者の体外の第2の位置に配置することができる。 After the deployment tool is activated and the expandable member is moved from the expanded configuration to the collapsed configuration, the expandable member is optionally placed at a second position between adjacent spinous processes at 6068 that is different from the first position. can do. In some embodiments, after the deployment tool is actuated to move the expandable member from the expanded configuration to the collapsed configuration, the expandable member may optionally be placed in a second position outside the patient's body at 6070. it can.
本明細書に記載した様々なインプラントおよび展開ツールは、様々な生体適合性材料、たとえばチタン、チタン合金、外科用鋼、生体適合性合金、ステンレス鋼、プラスチック、ポリエーテルエーテルケトン(PEEK)、カーボンファイバ,超高分子(UHMW)ポリエチレン、生体適合性ポリマー材料などから構成することができる。インプラントの中心部分の材料は、たとえば、骨の場合と同様、またはそれ以上の圧縮強度を有することが可能である。一実施態様では、2つの隣接する棘突起間に配置されるインプラントの中心部分は、棘突起を形成する骨の弾性率より大きい弾性率を有する材料を使って構成される。もう1つの実施態様では、インプラントの中心部分は、インプラントの遠位部分および近位部分を構成するために使用した材料より高い弾性率を有する材料を使って構成される。たとえば、インプラントの中心部分は骨より高い弾性率を有し、近位部分および遠位部分は骨より低い弾性率を有する。さらにもう1つの実施態様では、インプラントは、外殻および内核を使って構成される。外殻は、内核より高い弾性率を有する材料を使って構成することができる(たとえば、外殻をチタン合金で作成し、内核をポリマー材料で作成する)。別法によると、外殻は、内核より弾性率が低い材料を使って構成することができる(たとえば、外殻をポリマー材料で作成し、内核をチタン合金材料で作成する)。 The various implants and deployment tools described herein include various biocompatible materials such as titanium, titanium alloys, surgical steel, biocompatible alloys, stainless steel, plastics, polyetheretherketone (PEEK), carbon. It can be composed of fiber, ultra high molecular weight (UHMW) polyethylene, biocompatible polymer material, and the like. The material of the central portion of the implant can have a compressive strength, for example, similar to or greater than that of bone. In one embodiment, the central portion of the implant disposed between two adjacent spinous processes is constructed using a material having a modulus of elasticity greater than that of the bone forming the spinous processes. In another embodiment, the central portion of the implant is constructed using a material having a higher modulus of elasticity than the material used to construct the distal and proximal portions of the implant. For example, the central portion of the implant has a higher modulus of elasticity than bone and the proximal and distal portions have a lower modulus of elasticity than bone. In yet another embodiment, the implant is constructed using an outer shell and an inner core. The outer shell can be constructed using a material having a higher modulus of elasticity than the inner core (eg, the outer shell is made of a titanium alloy and the inner core is made of a polymer material). Alternatively, the outer shell can be constructed using a material that has a lower modulus of elasticity than the inner core (eg, the outer shell is made of a polymer material and the inner core is made of a titanium alloy material).
装置は、たとえば軸方向荷重または半径方向荷重が加わると、第1構成と第2構成との間で繰り返し移動するように構成された近位部分を有する長形部材を備える。この長形部材は、たとえば軸方向荷重または半径方向荷重が加わると、第1構成から第2構成に移動するように構成された遠位部分を有する。非拡張中心部分は、近位部分と遠位部分との間に配置される。この非拡張中心部分は、脊椎の伸展後に、隣接する棘突起に係合するように構成される。 The apparatus comprises an elongate member having a proximal portion configured to repeatedly move between a first configuration and a second configuration, for example upon application of an axial load or a radial load. The elongate member has a distal portion configured to move from the first configuration to the second configuration, for example upon application of an axial load or a radial load. The non-expanding central portion is disposed between the proximal portion and the distal portion. This non-expanding central portion is configured to engage adjacent spinous processes after spinal extension.
実施態様によっては、長形部材は、各々が第1構成から第2構成に同時または連続的に移動する複数の部分を有することができる。さらに、このデバイスまたはその一部は、第1構成と第2構成との間を移動する際に、多くの中間位置に構成することができる。分かりやすくするために、全体のデバイスを第1構成または第2構成として記載するが、デバイスおよび/またはその部分は、第1構成および第2構成を含む多くの構成を含む移動範囲を有すると考えるべきである。 In some embodiments, the elongate member can have multiple portions that each move simultaneously or sequentially from the first configuration to the second configuration. Furthermore, the device or a part thereof can be configured in a number of intermediate positions when moving between the first configuration and the second configuration. For clarity, the entire device is described as a first configuration or a second configuration, but the device and / or portions thereof are considered to have a range of movement that includes many configurations including the first configuration and the second configuration. Should.
図104は、2つの隣接する棘突起に隣接する本発明の一実施態様による医療デバイスの略図である。医療デバイス7010は、近位部分7012、遠位部分7014、および中心部分7016を備える。医療デバイス7010は、隣接する棘突起S間に挿入するか、または隣接する棘突起S間から取り外すことができる第1構成を有する。中心部分7016は、棘突起Sに接触して、棘突起Sの過剰伸張/圧縮を防止するように構成される。実施態様によっては、中心部分7016は、実質的に隣接する棘突起Sを伸延させない。他の実施態様では、中心部分7016は隣接する棘突起Sを伸延させない。医療デバイス7010は、患者の背中に挿入され、棘突起の側部から隣接する棘突起間に移動される(つまり、後部−側部接近)。曲線挿入シャフトの使用は、棘突起Sに対する側部接近の使用に役立つ。
FIG. 104 is a schematic illustration of a medical device according to one embodiment of the present invention adjacent to two adjacent spinous processes. The
第1構成では、近位部分7012、遠位部分7014、および中心部分7016は、共通の長手方向軸を共用する。他の実施態様では、これらの部分は、共通の長手方向軸を共用しない。実施態様によっては、近位部分7012、遠位部分7014、および中心部分7016は、一定の内径を有する管を画定する。他の実施態様では、近位部分7012、遠位部分7014、および中心部分7016は、一定の外径および/または内径を有する管を画定する。さらに他の実施態様では、近位部分7012、遠位部分7014、および/または中心部分7016は、異なる内径および/または外径を有する。
In the first configuration, the
医療デバイス7010は、図105に示すように、第1構成から第2構成に移動することができる。第2構成では、近位部分7012および遠位部分7014は、棘突起Sに対するデバイス7010の側方移動を制限するように配置される。近位部分7012および遠位部分7014は、第2構成で棘突起に係合するように構成される(つまり、直接、または周囲の組織を通して)。分かりやすくするため、棘突起Sの周囲の組織は図示しない。医療デバイスおよび/またはその部分は、患者の移動に対応する棘突起Sの移動範囲の全体または一部分において、棘突起Sに係合することができる点に注意する。
The
実施態様によっては、近位部分7012、遠位部分7014、および中心部分7016は、一体成形される。他の実施態様では、近位部分7012、遠位部分7014、および中心部分7016の1つまたは複数は、互いに結合された医療デバイス7010を形成することが可能な別個の構成要素である。たとえば、近位部分7012および遠位部分7014を一体成形し、中心部分7016は、これらに結合される別個の構成要素で良い。近位部分7012、遠位部分7014、および中心部分7016は、同じ材料でも異なる材料でも良い。これらの様々な部分は、たとえば摩擦嵌合、溶接、接着剤などで結合することができる。
In some embodiments, the
使用の際、棘突起Sは、医療デバイス7010内に挿入する前に伸延させることができる。棘突起の伸延については、本明細書で説明する。棘突起が伸延する際、トロカールを使用して、医療デバイス7010用の接近通路を画定することができる。実施態様によっては、トロカールは、通路を画定すると共に、棘突起Sを伸延させるために使用することができる。接近通路が画定された後、医療デバイス7010は、最初に遠位端7014を棘突起間に経皮的に挿入して前進させ、中心部分7016は棘突起S間に位置させる。医療デバイス7010が、棘突起間の所定の位置になった後、近位部分7012および遠位部分7014は、第2構成に連続的または同時に移動する。
In use, the spinous process S can be distracted prior to insertion into the
実施態様によっては、医療デバイス7010は、経皮的に(つまり、皮膚の開口部を通して)かつ最小限侵襲的な方法で挿入される。たとえば、本明細書で詳細に説明するとおり、インプラントの部分のサイズは、挿入した場合、開口部のサイズより小さい。インプラントの部分のサイズは、インプラントが棘突起間に挿入された後に拡張される。いったん拡張されると、インプラントの拡張部分のサイズは、開口部のサイズより大きくなる。圧潰されると、脊椎インプラントの各部分のサイズは、再び開口部のサイズより小さくなる。たとえば、皮膚の開口部/切開部のサイズは、開口部を横断して長さ3mm〜長さ25mmである。実施態様によっては、拡張構成におけるインプラントのサイズは、開口部を横断して3mm〜25mmである。
In some embodiments, the
実施態様によっては、近位部分7012および遠位部分7014は、元の構成または実質的に元の構成に戻ることができ、隣接する棘突起間に再配置されるか、またはこれらが挿入された体内から取り外される。
In some embodiments, the
図106は、たとえば、第1構成における医療デバイス7010の遠位部分7014の特性を表す変形可能な要素7018の略図である。変形可能部材7018は、その長さに沿って切欠部A、B、Cを備え、変形可能部材7018が予め決められた方法で変形することを可能にする脆弱な位置を画定する。切欠部A、B、Cの深さd、およびスロートT1、T2、T3の幅wに応じて、変形可能部材7018が、荷重が加わった状態で変形する方法を制御し、変えることができる。さらに、切欠部A、B、C間の長さL(つまり、切欠部間の材料の長さ)に応じて、変形可能部材7018が変形する方法を制御し、変えることができる。
FIG. 106 is a schematic illustration of a
図107は、図106に示す変形可能部材7018の拡張特性の略図である。たとえば矢印Xで指示する方向に荷重が加わると、変形可能部材7018は、上記のとおり、変形可能部材7018の特性に基づいて、予め決められた方法で変形する。図107に示すとおり、変形可能部材7018は、切欠部Cの構成、および切欠部BおよびC間の短い距離のために、切欠部BおよびCにおいて最も変形する。実施態様によっては、切欠部BおよびC間の変形可能部材7018の長さは、隣接する棘突起の一方の側部に適合するサイズである。
FIG. 107 is a schematic diagram of the expansion characteristics of the
変形可能部材7018は、切欠部Aの深さが浅いため、切欠部Aにおいて比較的堅い。図107に指示するとおり、円滑な遷移は、切欠部AおよびB間の変形可能部材7018によって画定される。こうした円滑な遷移の場合、切欠部BおよびC間などの比較的大幅な遷移(つまり、比較的急傾斜の壁部)に比べて、隣接する棘突起の側部を囲む組織に与える応力は少ない。変形可能部材7018の寸法および構成は、様々な切欠部における変形のタイミングも決定することができる。比較的脆弱な(つまり、比較的深くかつ広い)切欠部は、比較的強力な(つまり、比較的浅くかつ狭い)切欠部より先に変形する。
The
図108および図109は、それぞれ第1構成および第2構成における脊椎インプラント7100を示す。図108に示すように、脊椎インプラント7100は第1構成で圧潰され、隣接する棘突起間に挿入することができる。脊椎インプラント7100は、第1変形可能部分7110、第2変形可能部分7120、および中心の変形不能部分7150を有する。第1変形可能部分7110は、第1端部7112および第2端部7114を有する。第2変形可能部分7120は、第1端部7122および第2端部7124を有する。中心部分7150は、第2端部7114と第1端部7122との間に結合される。実施態様によっては、脊椎インプラント7100は一体成形される。
108 and 109 show
第1変形可能部分7110、第2変形可能部分7120、および中心部分7150は、脊椎インプラント7100の長さに沿って共通の長手方向軸Aを有する。中心部分7150は、第1変形可能部分7110および第2変形可能部分7120と同じ内径を有することが可能である。実施態様によっては、中心部分7150の外径は、第1変形可能部分7110および第2変形可能部分7120の外径より小さい。
First
使用の際、脊椎インプラント7100は、経皮的に隣接する棘突起間に挿入される。第1変形可能部分7110が最初に挿入され、棘突起を通過して、中心部分7150が棘突起間に配置される。中心部分7150の外径は、周囲の靭帯および組織を考慮に入れて、棘突起間の空間よりわずかに小さくて良い。実施態様によっては、中心部分7150は棘突起に直接接触し、棘突起の間に配置される。実施態様によっては、脊椎インプラント7100の中心部分は一定サイズであり、圧縮または拡張可能ではない。脊椎インプラント7100および/または第1変形可能部分7110、第2変形可能部分7120、および中心部分7150は、患者の移動に対応する棘突起の移動範囲の全部または一部において、棘突起に係合することが可能であることに注意する。
In use, the
第1変形可能部分7110は、たとえば拡張部材7115および7117を備える。拡張部材7115、7117の間には、開口部(図示しない)が画定される。上記と同様、開口部のサイズおよび形状は、拡張部材7115、7117が、軸方向荷重が加わった時に変形する方法に影響する。第2変形可能部分7120は、拡張部材7125および7127を備える。拡張部材7125、7127の間には、開口部(図示しない)が画定される。上記のとおり、開口部のサイズおよび形状は、拡張部材7125、7127が、軸方向荷重が加わった時に変形する方法に影響する。
The first
脊椎インプラント7100に軸方向荷重が加わった時に、脊椎インプラント7100は、図109に示すように、第2構成で拡張する。第2構成では、第1変形可能部分7110の第1端部7112および第2端部7114は互いの方向に移動し、拡張部材7115、7117は、長手方向軸Aから離れて実質的に側方に突出する。同様に、第2変形可能部分7120の第1端部7122および第2端部7124は互いの方向に移動し、拡張部材7125、7127は、長手方向軸Aから離れて側方に突出する。第2構成の拡張部材7115、7117、7125、7127は、間に脊椎インプラント7100が挿入される棘突起に隣接する位置に延在する突出部を形成する。第2構成では、拡張部材7115、7117、7125、7127は、脊椎インプラント7100の側方移動を妨げ、中心部分7150は、脊椎の伸展時に、隣接する棘突起が互いに移動し、中心部分7150の直径によって画定される距離より接近するのを妨げる。
When an axial load is applied to the
第1変形可能部分7110の第1端部7112は、ねじ付き開口部7113を画定する。中心部分7150は、第2ねじ付き開口部7155を画定する。第2変形可能部分7120の第2端部7124は、第3ねじ付き開口部7123を画定する。ねじ付き開口部7113、7155、7123は、アクチュエータ7200(図110参照)の部分を収容して、本明細書で詳細に説明するように、第1変形可能部分7100および第2変形可能部分7120をそれぞれの第1構成および第2構成間に移動させる。実施態様によっては、第1ねじ付き開口部7113は、第2ねじ付き開口部7155および第3ねじ付き開口部7123より大きい直径を有する(図108〜図111参照)。実施態様によっては、第2ねじ付き開口部7155および第3ねじ付き開口部7123は、同じ直径を有する(図108〜図111参照)。その他の実施態様では、第1ねじ付き開口部7113’および第2ねじ付き開口部7155’は同じ直径を有し(図112〜図115参照)、第3ねじ付き開口部7123’は、第1ねじ付き開口部および第2ねじ付き開口部より小さい直径を有する。ねじ付き開口部7113、7155、7123、7113’、7155’、7123’は、同軸に配列される。他の実施態様では、ねじ付き開口部は、異なるかまたは同じサイズの任意の組合せで良い。
The
脊椎インプラント7100は、実質的に脊椎インプラント7100の長手方向軸Aに沿って加わる圧縮力によって変形する。図110に示すように、この圧縮力は、アクチュエータ7200によって第1変形可能部分7110に加えられる。アクチュエータは、第1部分7210内に移動可能に収容される第1部分7210および第2部分7220を備える。実施態様によっては、第2部分7220は、第1部分7210内に摺動可能に収容される。他の実施態様では、第1部分7210および第2部分7220れはねじ結合される。各々の第1部分7210および第2部分7220には、それぞれ外側ねじ山7212および7222が設けられ、ねじ付き開口部7113、7155、7123、7113’、7155’、7123’に係合する。
The
図110に示すように、圧縮力は、第1変形可能部分7110に付与され、たとえば、ねじ付き部分7212を第1ねじ付き開口部7113に取り付け、ねじ付き部分7222を中心部分7150の第2ねじ付き開口部7155に取り付け、第2部分7220を長手方向軸Aに沿って引っ張り、その際、対抗する力を第1変形可能部分7110の第1端部7112に対して加えることによって付与する。対抗する力は、脊椎インプラント7100を上記のように拡張する圧縮力を生じる。
110, a compressive force is applied to the first
第1変形可能部分7110が第2構成に移動すると、ねじ付き部分7222は、第2ねじ付き開口部7155を通ってねじ込まれ、第3ねじ付き開口部7123にねじ結合する。圧縮力は、脊椎インプラント7100の第2変形可能部分7120に加えられ、そのため、アクチュエータの第2部分7220を矢印Fで指示される方向に引っ張り、その際、アクチュエータの第1部分7210を使用して、対抗する力を脊椎インプラント7100に加える。対抗する力は、図111に示すように、脊椎インプラントを拡張させる圧縮力を生じる。
As the first
実施態様によっては、第1変形可能部分7110および第2変形可能部分7120は、アクチュエータの第2部分7220が第3ねじ付き開口部7123に結合し、第1部分7210が第1ねじ付き開口部7113に結合して、圧縮力が加わる時に、同時に拡張する。
In some embodiments, the first
第1ねじ付き開口部7113’が、第2ねじ付き開口部7155’と同じ直径を有する実施態様では(たとえば、図112および図113に最も良く示されている)、第1ねじ付き部分7212は、第2ねじ付き開口部7155’にねじ結合し、第2ねじ付き部分7222は、第3ねじ付き開口部7123’にねじ結合することができる。こうして、圧縮力は、第2変形可能部分7120の中心部分7150と第2端部7124との間に加わる。第2変形可能部分7120が第2構成になった後、第1ねじ付き部分7212は、第1ねじ付き開口部7113’にねじ結合することができ、第1変形可能部分7110は、その第2構成に変形することができる。
In embodiments where the first threaded
第1変形可能部分7110および第2変形可能部分7120の各々は、第2の拡張構成に移動すると、その後、たとえば図114および図115に示すように、長手方向軸Aに沿って対向方向に力を加えることによって、第1の圧潰構成に戻ることができる。この実施例では、上記のとおり、図112〜図115に示す脊椎インプラント7100は、第2ねじ付き開口部7155’と同じ直径を有する第1ねじ付き開口部7113’を有する。
Each of the first
第1ねじ付き部分7212を第2ねじ付き開口部7155’に結合し、第2ねじ付き開口部7222を第3ねじ付き開口部7123’に結合すると、アクチュエータ7200の第2部分7220は、矢印Fによって指示される方向に移動し、第2変形可能部分7120を第1の圧潰構成に移動させる。
When the first threaded
その結果、第1ねじ付き部分7212は、第1ねじ付き開口部7113’に結合され、アクチュエータ7200の第2部分7220は、再び矢印Fの方向に移動して、第1変形可能部分7110は第1の圧潰構成に移動する。脊椎インプラント7100全体が完全に圧潰されると、脊椎インプラント7100は、棘突起間に再配置され、または棘突起間の位置から取り外され、以前に挿入された本体から取り外すことができる。実施態様によっては、第1変形可能部分7110および第2変形可能部分7120は完全に圧潰されるのではなく、完全拡張構成と完全圧潰構成との間の構成に移動する。このようにして、脊椎インプラント7100は、完全に圧潰されない状態で再配置されるか、または取り外されることもできる。
As a result, the first threaded
実施態様によっては、第1変形可能部分7110および第2変形可能部分7120は、バルーンをアクチュエータとして使用して、第1構成と第2構成との間で移動させることができる。その結果、図116に示すように、第2変形可能部分7120は、液体および/または気体でバルーン7300が膨張して生じる長手方向の力を与えることによって、第2構成から第1構成に移動させる。バルーン7300は、膨張すると、第2変形可能部分7120の中心部分7150および第2端部7124に対して圧迫される。バルーン7300によって加えられる力は、一般に、矢印Fで指示される方向である。実施態様によっては、バルーン7300は、予め画定された形状に拡張するように構成された低コンプライアントバルーンであり、その結果、力は、実質的に矢印Fで指示される長手方向に主に加わる。
In some embodiments, the first
第2変形可能部分7120は、実質的にその圧潰構成に移動し、バルーン7300は収縮して、第1変形可能部分7110に移動する。バルーン7300は、次に、図117に示すように膨張し、矢印Fで指示する方向に力を与える。実施態様によっては、同じバルーン7300を使用して、第1変形可能部分7110および第2変形可能部分7120の両方を圧潰する。他の実施態様では、異なるバルーンが、各々の部分7110、7120に使用される。全体のインプラント7100が第1構成に移動すると、バルーンは収縮して取り外される。実施態様によっては、バルーン7300は脊椎インプラント7100に留まり、脊椎インプラント7100およびバルーン7300は同時に取り外される。
The
実施態様によっては、バルーンが結合されるシャフトは、第1ねじ付き開口部7113、7113’および/または第2ねじ付き開口部7155、7155’に嵌合する外側のねじ山(図示しない)を有する。他の実施態様では、開口部にも、バルーンが結合されるシャフトにもねじが切られてない。さらに他の実施態様では、バルーン7300は、アクチュエータ7200の第1部分7210を通して挿入される。一方、アクチュエータ7200およびバルーン7300は、第1変形可能部分7110および第2変形可能部分7120を拡張および/または収縮させるために、脊椎インプラントに関連して使用することができる。
In some embodiments, the shaft to which the balloon is coupled has an outer thread (not shown) that fits into the first threaded
他の実施態様では、脊椎インプラント7100に画定されるねじ付き開口部は存在しない。たとえば、脊椎インプラントは、ねじが切られるのではなく、代わりに様々なタイプのアクチュエータのための接触表面または支持表面である複数のアクチュエータ係合部分を有することが可能である。たとえば、アクチュエータ(図示しない)は、脊椎インプラントの外面を把持するように構成され、同時に、脊椎インプラントの遠位部分に対して力を与え、インプラントを圧潰構成に移動させることが可能である。
In other embodiments, there are no threaded openings defined in the
脊椎インプラント7100は、たとえばステンレス鋼、プラスチック、ポリエーテルエーテルケトン(PEEK)、カーボンファイバ,超高分子(UHMW)ポリエチレンなど、またはこれらのいくつかの組合せから作成することができる。たとえば、第1変形可能部分および第2変形可能部分を1つの材料から作成し、非拡張中心部分を異なる材料から作成することができる。こうした非拡張中心部分の材料は、骨の引っ張り強さと同等、またはそれ以上の引っ張り強さを有することができる。
The
本発明の様々な実施態様について、上記で説明したが、これらの実施態様は、一例として提示するのであって、制限するものではないと考えるべきである。上記の方法およびステップは、一定の順序で行われる一定の事象を示しているが、この開示事項の利益を有する当業者は、一定のステップの順序は変更することができ、このような変更は本発明の変形例によることを認識するであろう。さらに、一定のステップは、可能であれば並行プロセスで同時に行うか、あるいは上記のように連続的に行うこともできる。したがって、本発明の広さおよび範囲は、上記の実施態様の何れかによって制限されるのではなく、添付の請求の範囲およびこれらと等価なものによってのみ定義されるべきである。本発明について、その特定の実施態様に関して特に図示して説明したが、形状および詳細の様々な変化が可能であることが分かるであろう。 While various embodiments of the present invention have been described above, it should be considered that these embodiments are presented by way of example and not limitation. Although the methods and steps described above illustrate certain events that occur in a certain order, those skilled in the art having the benefit of this disclosure can alter the order of certain steps, and such modifications are not It will be appreciated that this is a variation of the invention. Furthermore, certain steps can be performed simultaneously in parallel processes, if possible, or continuously as described above. Accordingly, the breadth and scope of the present invention should not be limited by any of the above-described embodiments, but should be defined only in accordance with the appended claims and their equivalents. Although the invention has been particularly illustrated and described with respect to specific embodiments thereof, it will be appreciated that various changes in shape and detail are possible.
たとえば、上記の実施態様は、主として、隣接する棘突起間に配置されるように構成された脊椎インプラントとして説明されているが、別法による実施態様では、インプラントは、ある骨、組織またはその他の身体構造に隣接して配置するように構成されるが、インプラントの軸方向または長手方向の移動を防止しつつ、間隔を維持することが望ましい。 For example, while the above embodiment has been described primarily as a spinal implant configured to be placed between adjacent spinous processes, in an alternative embodiment, the implant can be a bone, tissue or other Although configured to be positioned adjacent to the body structure, it is desirable to maintain the spacing while preventing axial or longitudinal movement of the implant.
本明細書に記載するインプラントは、主として、隣接する棘突起を伸延させないとして説明されているが、別法による実施態様では、インプラントは、隣接する棘突起を伸延させるために拡張するように構成することが可能である。 Although the implants described herein are primarily described as not distracting adjacent spinous processes, in alternative embodiments, the implant is configured to expand to distract adjacent spinous processes. It is possible.
インプラントは、隣接する棘突起間に直接挿入するように説明されているが、別法による実施態様では、上記のインプラントは、カニューレを通して供給することができる。 Although the implant has been described as inserting directly between adjacent spinous processes, in an alternative embodiment, the implant can be delivered through a cannula.
たとえば、揺動アーム1700は、弓形部分を有するとして説明されているが、本発明の別法による実施態様では、全体の揺動アーム1700が弓形構成を有する場合がある。さらに、揺動アーム1700内に画定される開口部は、揺動アーム1700全長に及ぶ場合がある。
For example, although the
揺動アーム1700は、揺動アーム1700は、その端部に円形の開口部を有するとして説明および図示されているが、別法による実施態様では、開口部は任意の形状で良く、作業ツールおよび/またはスペーサの部分の形状は、揺動アームの開口部に嵌合する形状にすることが可能である。
Although the
揺動アームと作業ツールとの間の接続部は、揺動アームが雌構成要素であり、作業ツールが雄構成要素であるように示されているが、別法による実施態様では、雌/雄の関係の向きは逆で良い。 The connection between the oscillating arm and the work tool is shown such that the oscillating arm is a female component and the work tool is a male component; The direction of the relationship may be reversed.
第1クランプ1100の第1アーム1170および第2アーム1180は、弾性結合されると説明されているが、本発明の別法による実施態様では、第1アーム1170および第2アーム1180は枢着または蝶着される。
Although the
第1クランプおよび第2クランプは、棘突起の対向側に係合するかみ合い部を有するとして開示されているが、別法による実施態様では、第1クランプおよび第2クランプは、棘突起に係合するその他の構成、たとえば吸引、接着剤、ピン/突出部などを備える場合がある。 Although the first clamp and the second clamp are disclosed as having a mating portion that engages opposite sides of the spinous process, in an alternative embodiment, the first clamp and the second clamp engage the spinous process. Other configurations may be provided, such as suction, adhesive, pins / protrusions, and the like.
第1クランプおよび第2クランプは、互いに対して移動可能であると開示されているが、別法による実施態様では、第1クランプまたは第2クランプは所定の位置に固定され、その他のクランプが固定されたクランプに対して移動する場合がある。 Although the first clamp and the second clamp are disclosed as being movable relative to each other, in an alternative embodiment, the first clamp or the second clamp is fixed in place and the other clamps are fixed. May move relative to the clamp.
クランプの第1アームおよび第2アームは、互いから離れて弾性的に付勢されているように示されているが、別法による実施態様では、第1アームおよび第2アームは、異なる構成(たとえば、はさみ構成)を使用して、手動で互いの方向に、かつ互いから離れるように移動させることが可能である。 Although the first arm and the second arm of the clamp are shown to be elastically biased away from each other, in an alternative embodiment, the first arm and the second arm have different configurations ( For example, a scissor arrangement can be used to manually move in the direction of each other and away from each other.
リテーナを使用して揺動アームに結合されるワイヤを示す実施態様が開示されているが、別法による実施態様では、リテーナを使用する必要はない。ワイヤは、その他の保持方法、たとえばワイヤが内部に固締されるスリットなどを使用して、揺動アームに結合することができる。 Although an embodiment is disclosed that shows a wire coupled to a swing arm using a retainer, in an alternative embodiment, it is not necessary to use a retainer. The wire can be coupled to the swing arm using other holding methods, such as a slit in which the wire is clamped.
さらに、作業ツール1840は、トロカール先端として開示されているが、作業ツールは、たとえばスペーサ、バルーンアクチュエータ、ボーンタンプなど、任意の作業ツールでも良い。
Furthermore, although the
上記の実施態様は、隣接する棘突起間に配置するように構成された脊椎インプラントとして主に説明されているが、別法による実施態様では、インプラントは、骨、組織またはその他の身体構造に隣接して配置するように構成され、この場合、インプラントの軸方向または長手方向の移動を防止しつつ、間隔を維持することが望ましい。 While the above embodiments are primarily described as spinal implants configured to be placed between adjacent spinous processes, in alternative embodiments, the implants are adjacent to bone, tissue or other body structure. In this case, it is desirable to maintain the spacing while preventing axial or longitudinal movement of the implant.
本明細書に記載するインプラントは、主として、隣接する棘突起を伸延させないとして説明されているが、別法による実施態様では、インプラントは、隣接する棘突起を伸延させるために拡張するように構成することができる。 Although the implants described herein are primarily described as not distracting adjacent spinous processes, in alternative embodiments, the implant is configured to expand to distract adjacent spinous processes. be able to.
インプラントは、隣接する棘突起間に直接挿入されるように説明されているが、別法による実施態様では、上記のインプラントは、カニューレを通して供給することができる。 Although the implant is described as being inserted directly between adjacent spinous processes, in an alternative embodiment, the implant can be delivered through a cannula.
脊椎インプラントを拡張構成から圧潰構成に移動させるために使用されるアクチュエータは、ロッド組立体またはバルーンとして説明されているが、別法による実施態様では、アクチュエータは、インプラントをその圧潰構成に移動させるのに十分な長手方向の力を付与するように構成された任意のデバイスで良い。たとえば、アクチュエータは、ピストン/シリンダ組立体、ラチェット組立体などで良い。 Although the actuator used to move the spinal implant from the expanded configuration to the collapsed configuration has been described as a rod assembly or balloon, in an alternative embodiment, the actuator moves the implant to its collapsed configuration. Can be any device configured to provide sufficient longitudinal force. For example, the actuator may be a piston / cylinder assembly, a ratchet assembly, or the like.
Claims (10)
近位部分の少なくとも一部分を拡張させるために、前記第1構成から前記第2構成に変形するように構成された、第1端部を有する当該近位部分と、
遠位部分の少なくとも一部分を拡張させるために、前記第1構成から前記第2構成に変形するように構成された、第2端部を有する当該遠位部分と、
前記近位部分と前記遠位部分との間の、長手方向軸に沿って延びる非拡張中心部分であって、隣接する棘突起に係合するように構成された当該非拡張中心部分とを有し、
前記近位部分が、前記第1端部と前記中心部分との間に、前記第1構成にあるときに前記長手方向軸に平行に延びる複数の第1の拡張部材を備え、当該複数の第1の拡張部材の間に開口部が画定されており、
前記遠位部分が、前記第2端部と前記中心部分との間に、前記第1構成にあるときに前記長手方向軸と平行に延びる複数の第2の拡張部材を備え、当該複数の第2の拡張部材の間に開口部が画定されており、
前記第2構成においては、前記第1端部と前記中心部分との間で前記第1の拡張部材の少なくとも一部が前記長手方向軸から離れて側方に突出し、また、前記第2端部と前記中心部分との間で前記第2の拡張部材の少なくとも一部が前記長手方向軸から離れて側方に突出する、装置。An apparatus comprising the expandable elongated member configured to deform from a first configuration to a second configuration to expand at least a portion of the expandable elongated member, the expandable elongated member comprising:
The proximal portion having a first end configured to deform from the first configuration to the second configuration to expand at least a portion of the proximal portion;
The distal portion having a second end configured to deform from the first configuration to the second configuration to expand at least a portion of the distal portion;
A non-expandable central portion extending along a longitudinal axis between the proximal portion and the distal portion, the non-expandable central portion configured to engage an adjacent spinous process. And
Wherein the proximal portion content, between said central portion and said first end portion includes a plurality of first extension member extending parallel to the longitudinal axis when in the first configuration, the plurality An opening is defined between the first expansion members ;
The distal portion includes a plurality of second expansion members between the second end and the central portion that extend parallel to the longitudinal axis when in the first configuration, An opening is defined between the two expansion members;
In the second configuration, at least a part of the first expansion member protrudes laterally away from the longitudinal axis between the first end portion and the central portion, and the second end portion And at least a portion of the second expansion member projects laterally away from the longitudinal axis between the central portion and the central portion .
る、請求項1に記載の装置。The apparatus of claim 1, wherein the non-expanding central portion is configured to engage the adjacent spinous process after expansion of the spine.
成で離間され、前記第2構成で嵌合して、前記タブおよびスロットが、嵌合した後は前記
近位部分がさらに変形するのを制限するように構成される、請求項1または2に記載の装
置。The proximal portion comprises a tab and a slot, the tab and the slot being spaced apart in the first configuration and mating in the second configuration, the tab and the slot being mated after the proximal The apparatus according to claim 1 or 2, wherein the apparatus is configured to limit further deformation of the portion.
る管を形成する、請求項1から3のいずれか一項に記載の装置。4. The device according to any one of claims 1 to 3, wherein the proximal portion, the distal portion, and the central portion together form a tube having a substantially constant inner diameter.
軸方向に加わった状態で、前記第1構成から前記第2構成へ移動可能である、請求項1か
ら4のいずれか一項に記載の装置。The deformable proximal portion and the deformable distal portion are movable from the first configuration to the second configuration with an axial load applied to compress the device. The apparatus according to any one of claims 4 to 4 .
くとも2つの突出部を備え、前記少なくとも2つの突出部の第1の突出部の遠位端と、前
記少なくとも2つの突出部の第2の突出部の前記遠位端との間に画定される距離が、前記
隣接する棘突起間の空間より大きい、請求項1から5のいずれか一項に記載の装置。The proximal portion of the second configuration comprises at least two protrusions disposed adjacent to the sides of the adjacent spinous processes, the distal end of the first protrusion of the at least two protrusions When the distance defined between the distal end of the second protrusion of the at least two protrusions, space larger than any one of claims 1 to 5 between the adjacent spinous processes The device described in 1.
請求項1から6のいずれか一項に記載の装置。The proximal portion, the distal portion, and the central portion are physically separate components;
Apparatus according to any one of claims 1 to 6.
請求項1から8のいずれか一項に記載の装置。The expandable elongated member is configured to be inserted between percutaneously adjacent spinous processes;
Apparatus according to any one of claims 1 to 8 .
、前記第1構成から前記第2構成に変形する、請求項1から9のいずれか一項に記載の
装置。Said proximal portion and said distal portion, wherein in a state where adjacent spinous processes does not substantially extend, deforms the second configuration from the first configuration, according to any one of claims 1 9 Equipment.
Applications Claiming Priority (9)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US11/059,526 | 2005-02-17 | ||
| US11/059,526 US20060195102A1 (en) | 2005-02-17 | 2005-02-17 | Apparatus and method for treatment of spinal conditions |
| US69583605P | 2005-07-01 | 2005-07-01 | |
| US60/695,836 | 2005-07-01 | ||
| US11/252,879 US8038698B2 (en) | 2005-02-17 | 2005-10-19 | Percutaneous spinal implants and methods |
| US11/252,880 | 2005-10-19 | ||
| US11/252,879 | 2005-10-19 | ||
| US11/252,880 US20060184248A1 (en) | 2005-02-17 | 2005-10-19 | Percutaneous spinal implants and methods |
| PCT/US2006/005580 WO2006089085A2 (en) | 2005-02-17 | 2006-02-17 | Percutaneous spinal implants and methods |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008529737A JP2008529737A (en) | 2008-08-07 |
| JP4977038B2 true JP4977038B2 (en) | 2012-07-18 |
Family
ID=39730621
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007556308A Expired - Fee Related JP4977038B2 (en) | 2005-02-17 | 2006-02-17 | Percutaneous spinal implant and method |
Country Status (9)
| Country | Link |
|---|---|
| EP (1) | EP1848351A4 (en) |
| JP (1) | JP4977038B2 (en) |
| KR (2) | KR20100031774A (en) |
| CN (1) | CN102151169A (en) |
| AU (1) | AU2006214169A1 (en) |
| CA (1) | CA2597923A1 (en) |
| IL (1) | IL185190A0 (en) |
| MX (1) | MX2007009883A (en) |
| WO (1) | WO2006089085A2 (en) |
Families Citing this family (58)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9161783B2 (en) | 2004-10-20 | 2015-10-20 | Vertiflex, Inc. | Interspinous spacer |
| US8273108B2 (en) | 2004-10-20 | 2012-09-25 | Vertiflex, Inc. | Interspinous spacer |
| US8128662B2 (en) | 2004-10-20 | 2012-03-06 | Vertiflex, Inc. | Minimally invasive tooling for delivery of interspinous spacer |
| US8123807B2 (en) | 2004-10-20 | 2012-02-28 | Vertiflex, Inc. | Systems and methods for posterior dynamic stabilization of the spine |
| US8292922B2 (en) | 2004-10-20 | 2012-10-23 | Vertiflex, Inc. | Interspinous spacer |
| US8425559B2 (en) | 2004-10-20 | 2013-04-23 | Vertiflex, Inc. | Systems and methods for posterior dynamic stabilization of the spine |
| US9119680B2 (en) | 2004-10-20 | 2015-09-01 | Vertiflex, Inc. | Interspinous spacer |
| US8152837B2 (en) | 2004-10-20 | 2012-04-10 | The Board Of Trustees Of The Leland Stanford Junior University | Systems and methods for posterior dynamic stabilization of the spine |
| US8409282B2 (en) | 2004-10-20 | 2013-04-02 | Vertiflex, Inc. | Systems and methods for posterior dynamic stabilization of the spine |
| US8317864B2 (en) | 2004-10-20 | 2012-11-27 | The Board Of Trustees Of The Leland Stanford Junior University | Systems and methods for posterior dynamic stabilization of the spine |
| US7763074B2 (en) | 2004-10-20 | 2010-07-27 | The Board Of Trustees Of The Leland Stanford Junior University | Systems and methods for posterior dynamic stabilization of the spine |
| US9023084B2 (en) | 2004-10-20 | 2015-05-05 | The Board Of Trustees Of The Leland Stanford Junior University | Systems and methods for stabilizing the motion or adjusting the position of the spine |
| US8167944B2 (en) | 2004-10-20 | 2012-05-01 | The Board Of Trustees Of The Leland Stanford Junior University | Systems and methods for posterior dynamic stabilization of the spine |
| WO2006047562A2 (en) * | 2004-10-25 | 2006-05-04 | Lins Robert E | Interspinous distraction devices and associated methods of insertion |
| WO2009086010A2 (en) | 2004-12-06 | 2009-07-09 | Vertiflex, Inc. | Spacer insertion instrument |
| US8096994B2 (en) * | 2005-02-17 | 2012-01-17 | Kyphon Sarl | Percutaneous spinal implants and methods |
| US7691130B2 (en) | 2006-01-27 | 2010-04-06 | Warsaw Orthopedic, Inc. | Spinal implants including a sensor and methods of use |
| GB2436292B (en) * | 2006-03-24 | 2011-03-16 | Galley Geoffrey H | Expandable spacing means for insertion between spinous processes of adjacent vertebrae |
| US20070276497A1 (en) * | 2006-05-23 | 2007-11-29 | Sdgi Holdings. Inc. | Surgical spacer |
| US20070276496A1 (en) * | 2006-05-23 | 2007-11-29 | Sdgi Holdings, Inc. | Surgical spacer with shape control |
| US20070276369A1 (en) * | 2006-05-26 | 2007-11-29 | Sdgi Holdings, Inc. | In vivo-customizable implant |
| EP2032081A4 (en) * | 2006-06-16 | 2009-11-25 | Kyphon Sarl | PERCUTANEOUS VERTEBRAL IMPLANTS AND METHODS |
| US8845726B2 (en) | 2006-10-18 | 2014-09-30 | Vertiflex, Inc. | Dilator |
| US7862502B2 (en) | 2006-10-20 | 2011-01-04 | Ellipse Technologies, Inc. | Method and apparatus for adjusting a gastrointestinal restriction device |
| US8057481B2 (en) | 2006-11-03 | 2011-11-15 | Innovative Spine, Llc | System and method for providing surgical access to a spine |
| JP5271281B2 (en) | 2007-02-09 | 2013-08-21 | アルファテック スパイン, インコーポレイテッド | Curved spine access method and device |
| US20080249531A1 (en) * | 2007-02-27 | 2008-10-09 | Warsaw Orthopedic, Inc. | Instruments and methods for minimally invasive insertion of dynamic implants |
| US7799058B2 (en) | 2007-04-19 | 2010-09-21 | Zimmer Gmbh | Interspinous spacer |
| US8142479B2 (en) * | 2007-05-01 | 2012-03-27 | Spinal Simplicity Llc | Interspinous process implants having deployable engagement arms |
| JP5226066B2 (en) * | 2007-05-01 | 2013-07-03 | スパイナル シンプリシティ エルエルシー | Interspinous implant and method of embedding it |
| WO2009039464A1 (en) * | 2007-09-20 | 2009-03-26 | Life Spine, Inc. | Expandable spinal spacer |
| EP2244670B1 (en) | 2008-01-15 | 2017-09-13 | Vertiflex, Inc. | Interspinous spacer |
| US8252029B2 (en) | 2008-02-21 | 2012-08-28 | Zimmer Gmbh | Expandable interspinous process spacer with lateral support and method for implantation |
| US8114131B2 (en) * | 2008-11-05 | 2012-02-14 | Kyphon Sarl | Extension limiting devices and methods of use for the spine |
| US8382756B2 (en) | 2008-11-10 | 2013-02-26 | Ellipse Technologies, Inc. | External adjustment device for distraction device |
| US8771317B2 (en) * | 2009-10-28 | 2014-07-08 | Warsaw Orthopedic, Inc. | Interspinous process implant and method of implantation |
| EP2512357B1 (en) | 2009-12-15 | 2016-07-13 | Vertiflex, Inc. | Spinal spacer for cervical and other vertebra, and associated systems |
| JP5272279B2 (en) * | 2010-03-09 | 2013-08-28 | 国立大学法人神戸大学 | Interspinous process implant |
| US9248043B2 (en) | 2010-06-30 | 2016-02-02 | Ellipse Technologies, Inc. | External adjustment device for distraction device |
| CN103501714A (en) * | 2011-02-11 | 2014-01-08 | 泰尔茂株式会社 | Interspinous process spacing device |
| WO2012112396A2 (en) | 2011-02-14 | 2012-08-23 | Ellipse Technologies, Inc. | Device and method for treating fractured bones |
| US10743794B2 (en) | 2011-10-04 | 2020-08-18 | Nuvasive Specialized Orthopedics, Inc. | Devices and methods for non-invasive implant length sensing |
| US10016220B2 (en) | 2011-11-01 | 2018-07-10 | Nuvasive Specialized Orthopedics, Inc. | Adjustable magnetic devices and methods of using same |
| US9011450B2 (en) | 2012-08-08 | 2015-04-21 | DePuy Synthes Products, LLC | Surgical instrument |
| EP3760147B1 (en) | 2012-10-29 | 2022-11-30 | NuVasive Specialized Orthopedics, Inc. | Adjustable devices for treating arthritis of the knee |
| US9675303B2 (en) | 2013-03-15 | 2017-06-13 | Vertiflex, Inc. | Visualization systems, instruments and methods of using the same in spinal decompression procedures |
| WO2015001661A1 (en) * | 2013-07-05 | 2015-01-08 | テルモ株式会社 | Medical assistance tool, medical tool, and method of measuring distance |
| US10751094B2 (en) | 2013-10-10 | 2020-08-25 | Nuvasive Specialized Orthopedics, Inc. | Adjustable spinal implant |
| EP3137000B1 (en) | 2014-04-28 | 2023-08-23 | NuVasive Specialized Orthopedics, Inc. | System for informational magnetic feedback in adjustable implants |
| EP3139848A4 (en) | 2014-05-07 | 2018-06-13 | Vertiflex, Inc. | Spinal nerve decompression systems, dilation systems, and methods of using the same |
| WO2016105524A1 (en) | 2014-12-26 | 2016-06-30 | Ellipse Technologies, Inc. | Systems and methods for distraction |
| US10238427B2 (en) | 2015-02-19 | 2019-03-26 | Nuvasive Specialized Orthopedics, Inc. | Systems and methods for vertebral adjustment |
| EP4275631B1 (en) | 2015-12-10 | 2025-10-01 | NuVasive Specialized Orthopedics, Inc. | External adjustment device for distraction device |
| ES2805657T3 (en) | 2016-01-28 | 2021-02-15 | Nuvasive Specialized Orthopedics Inc | Systems for bone transport |
| KR102066839B1 (en) * | 2018-06-08 | 2020-01-16 | 주식회사 아이키 | Monitoring system for bone growth promotion |
| EP4426216B1 (en) | 2022-02-15 | 2025-06-04 | Boston Scientific Neuromodulation Corporation | Interspinous spacer and systems utilizing the interspinous spacer |
| US12433646B2 (en) | 2023-02-21 | 2025-10-07 | Boston Scientific Neuromodulation Corporation | Interspinous spacer with actuator locking arrangements and methods and systems |
| US12390340B2 (en) | 2023-03-15 | 2025-08-19 | Boston Scientific Neuromodulation Corporation | Interspinous spacer with a range of deployment positions and methods and systems |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7101375B2 (en) * | 1997-01-02 | 2006-09-05 | St. Francis Medical Technologies, Inc. | Spine distraction implant |
| US5836948A (en) * | 1997-01-02 | 1998-11-17 | Saint Francis Medical Technologies, Llc | Spine distraction implant and method |
| US5860977A (en) * | 1997-01-02 | 1999-01-19 | Saint Francis Medical Technologies, Llc | Spine distraction implant and method |
| IL155494A0 (en) | 1999-08-18 | 2003-11-23 | Intrinsic Therapeutics Inc | Devices and method for nucleus pulposus augmentation and retention |
| EP1309280A2 (en) * | 2000-08-11 | 2003-05-14 | SDGI Holdings, Inc. | Surgical instrumentation and method for treatment of the spine |
| US6733534B2 (en) * | 2002-01-29 | 2004-05-11 | Sdgi Holdings, Inc. | System and method for spine spacing |
| US8287561B2 (en) * | 2002-06-28 | 2012-10-16 | Boston Scientific Scimed, Inc. | Balloon-type actuator for surgical applications |
| WO2004016205A2 (en) * | 2002-08-15 | 2004-02-26 | Coppes Justin K | Intervertebral disc implant |
| KR100582768B1 (en) * | 2003-07-24 | 2006-05-23 | 최병관 | Prostheses for spinal spine insertion |
-
2006
- 2006-02-17 CA CA002597923A patent/CA2597923A1/en not_active Abandoned
- 2006-02-17 CN CN2011101005719A patent/CN102151169A/en active Pending
- 2006-02-17 MX MX2007009883A patent/MX2007009883A/en not_active Application Discontinuation
- 2006-02-17 KR KR1020107003047A patent/KR20100031774A/en not_active Ceased
- 2006-02-17 JP JP2007556308A patent/JP4977038B2/en not_active Expired - Fee Related
- 2006-02-17 EP EP06735305A patent/EP1848351A4/en not_active Withdrawn
- 2006-02-17 WO PCT/US2006/005580 patent/WO2006089085A2/en not_active Ceased
- 2006-02-17 KR KR1020077021079A patent/KR101119264B1/en not_active Expired - Fee Related
- 2006-02-17 AU AU2006214169A patent/AU2006214169A1/en not_active Abandoned
-
2007
- 2007-08-09 IL IL185190A patent/IL185190A0/en unknown
Also Published As
| Publication number | Publication date |
|---|---|
| IL185190A0 (en) | 2007-12-03 |
| WO2006089085A2 (en) | 2006-08-24 |
| WO2006089085A3 (en) | 2007-01-11 |
| EP1848351A4 (en) | 2012-03-14 |
| KR20100031774A (en) | 2010-03-24 |
| CN102151169A (en) | 2011-08-17 |
| KR20070112186A (en) | 2007-11-22 |
| JP2008529737A (en) | 2008-08-07 |
| MX2007009883A (en) | 2007-09-26 |
| EP1848351A2 (en) | 2007-10-31 |
| CA2597923A1 (en) | 2006-08-24 |
| AU2006214169A1 (en) | 2006-08-24 |
| KR101119264B1 (en) | 2012-04-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4977038B2 (en) | Percutaneous spinal implant and method | |
| US7998174B2 (en) | Percutaneous spinal implants and methods | |
| US7993342B2 (en) | Percutaneous spinal implants and methods | |
| US8147516B2 (en) | Percutaneous spinal implants and methods | |
| US8100943B2 (en) | Percutaneous spinal implants and methods | |
| US8167890B2 (en) | Percutaneous spinal implants and methods | |
| US8029549B2 (en) | Percutaneous spinal implants and methods | |
| CN101155553B (en) | Percutaneous vertebral implant | |
| US20070276373A1 (en) | Percutaneous Spinal Implants and Methods | |
| US20070276372A1 (en) | Percutaneous Spinal Implants and Methods | |
| US7988709B2 (en) | Percutaneous spinal implants and methods | |
| US20080039944A1 (en) | Percutaneous Spinal Implants and Methods | |
| US8568461B2 (en) | Percutaneous spinal implants and methods | |
| AU2007260690B2 (en) | Percutaneous spinal implants and methods |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080509 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080509 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20081031 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20081031 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20091120 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20091216 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20091218 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110127 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110203 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110422 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110502 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110509 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110516 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110802 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111014 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120111 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120118 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120214 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120319 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120413 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150420 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |