JP4976084B2 - 位置誤差吸収装置 - Google Patents
位置誤差吸収装置 Download PDFInfo
- Publication number
- JP4976084B2 JP4976084B2 JP2006242660A JP2006242660A JP4976084B2 JP 4976084 B2 JP4976084 B2 JP 4976084B2 JP 2006242660 A JP2006242660 A JP 2006242660A JP 2006242660 A JP2006242660 A JP 2006242660A JP 4976084 B2 JP4976084 B2 JP 4976084B2
- Authority
- JP
- Japan
- Prior art keywords
- movable body
- position error
- fluid pressure
- piston rod
- absorbing device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Landscapes
- Automatic Assembly (AREA)
- Manipulator (AREA)
Description
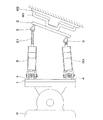
W2 相手方部材
1 固定体
2 可動体
3 流体圧シリンダ
4 ユニバーサルジョイント
5 ボールジョイント
6 流体供給源
7 圧力供給弁
8 SOLバルブ
9 ロック部材
30 シリンダ本体
31 ピストンロッド
Claims (6)
- 互いに嵌合する部分を有する一方の部材(W1)と他方の部材(W2)とを嵌め合わすときの前記一方の部材(W1)の姿勢を修正する位置誤差吸収装置であって、
ロボットの出力端側に取り付けられる固定体(1)と、前記一方の部材(W1)が取り付けられる可動体(2)とを、両端に多自由度継手を具備させた複数の流体圧シリンダ(3)を介して連結することにより全体としてパラレルメカニズムを構成し、
前記多自由度継手は、前記可動体(2)が受ける力に従って自在に動くように形成されており、
前記流体圧シリンダ(3)は、前記可動体(2)に接続されているピストンロッド(31)を有し、内部の流体の圧力の調整により、該ピストンロッド(31)を受動的に伸縮自在な状態にすることができるように形成されており、
前記流体圧シリンダ(3)の作動により前記ピストンロッド(31)を受動的に伸縮自在な状態にし、該状態にて前記ピストンロッド(31)を伸ばすことにより前記可動体(2)を移動して前記一方の部材(W1)を前記他方の部材(W2)に押し付けることにより、該一方の部材(W1)が該他方の部材(W2)から受ける反力を軽減しつつ、該一方の部材(W1)と該他方の部材(W2)とが互いに嵌合する部分の形状に従って前記多自由度継手が動くように形成されている
ことを特徴とする位置誤差吸収装置。 - 互いに嵌合する部分を有する一方の部材(W1)と他方の部材(W2)とを嵌め合わすときの前記一方の部材(W1)の姿勢を修正する位置誤差吸収装置であって、
ロボットの出力端以外の任意箇所に取り付けられる固定体(1)と、前記一方の部材(W1)が取り付けられる可動体(2)とを、両端に多自由度継手を具備させた複数の流体圧シリンダ(3)を介して連結することにより全体としてパラレルメカニズムを構成し、
前記多自由度継手は、前記可動体(2)が受ける力に従って自在に動くように形成されており、
前記流体圧シリンダ(3)は、前記可動体(2)に接続されているピストンロッド(31)を有し、内部の流体の圧力の調整により、該ピストンロッド(31)を受動的に伸縮自在な状態にすることができるように形成されており、
前記流体圧シリンダ(3)の作動により前記ピストンロッド(31)を受動的に伸縮自在な状態にし、該状態にて前記ピストンロッド(31)を伸ばすことにより前記可動体(2)を移動して前記一方の部材(W1)を前記他方の部材(W2)に押し付けることにより、該一方の部材(W1)が該他方の部材(W2)から受ける反力を軽減しつつ、該一方の部材(W1)と該他方の部材(W2)とが互いに嵌合する部分の形状に従って前記多自由度継手が動くように形成されている
ことを特徴とする位置誤差吸収装置。 - 前記流体圧シリンダ(3)を少なくとも6本有すると共に、流体圧シリンダ(3)の両端に設けられた多自由度継手の少なくとも一方がユニバーサルジョイント(4)あるいはボールジョイント(5)からなるものとし、前記パラレルメカニズムがXYZ軸方向に3軸とその各軸回転方向に3軸の計6自由度を持つようにしたことを特徴とする請求項1または2に記載の位置誤差吸収装置。
- 前記パラレルメカニズムに基づいた可動体(2)の動きを必要に応じて適時にロックさせることができるロック機構を具備することを特徴とする請求項1乃至3に記載の位置誤差吸収装置。
- 前記ロック機構として、流体圧シリンダ(3)に流体圧を供給してピストンロッド(31)の伸縮運動を拘束することにより、前記パラレルメカニズムに基づいた可動体(2)の動きを必要に応じて適時にロックさせることができるようにしたことを特徴とする請求項4に記載の位置誤差吸収装置。
- 前記ロック機構として、固定体(1)と可動体(2)の間にロック部材(9)を架設することにより、前記パラレルメカニズムに基づいた可動体(2)の動きを必要に応じて適時にロックさせることができるようにしたことを特徴とする請求項4に記載の位置誤差吸収装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006242660A JP4976084B2 (ja) | 2006-09-07 | 2006-09-07 | 位置誤差吸収装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006242660A JP4976084B2 (ja) | 2006-09-07 | 2006-09-07 | 位置誤差吸収装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008062335A JP2008062335A (ja) | 2008-03-21 |
| JP4976084B2 true JP4976084B2 (ja) | 2012-07-18 |
Family
ID=39285478
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006242660A Expired - Fee Related JP4976084B2 (ja) | 2006-09-07 | 2006-09-07 | 位置誤差吸収装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4976084B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107414787A (zh) * | 2017-03-24 | 2017-12-01 | 中国科学院长春光学精密机械与物理研究所 | 一种可防止支腿自转的6‑sps构型六自由度并联平台 |
| CN110712020A (zh) * | 2019-12-16 | 2020-01-21 | 天津航天机电设备研究所 | 柔性对接及快速定位系统 |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2009128125A1 (ja) * | 2008-04-14 | 2009-10-22 | 学校法人立命館 | 多脚歩行式移動装置の足部機構 |
| KR101021172B1 (ko) | 2008-10-14 | 2011-03-15 | 한양대학교 산학협력단 | 매달린 형태의 병렬기구구조 |
| JP5671441B2 (ja) * | 2011-11-11 | 2015-02-18 | 本田技研工業株式会社 | ワーク把持装置 |
| GB2520983A (en) * | 2013-12-06 | 2015-06-10 | Huber Diffraktionstechnik Gmbh & Co Kg | Redundant parallel positioning table |
| US11458579B2 (en) | 2013-12-06 | 2022-10-04 | Huber Diffraktionstechnik Gmbh & Co. Kg | Redundant parallel positioning table device |
| JP6309466B2 (ja) * | 2015-01-22 | 2018-04-11 | 光洋機械工業株式会社 | 両頭平面研削装置 |
| JP6284129B2 (ja) * | 2015-09-17 | 2018-02-28 | 広島県 | コンプライアンスデバイス |
| CN110202342A (zh) * | 2019-05-09 | 2019-09-06 | 长春理工大学 | 一种大部件对接装配模拟平台 |
| CN110216468B (zh) * | 2019-07-04 | 2024-06-11 | 丁力 | 一种柔性装配托架车 |
| JP7452257B2 (ja) * | 2020-05-29 | 2024-03-19 | オムロン株式会社 | 制御装置、ロボットシステム、およびロボットの制御方法 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04348887A (ja) * | 1991-05-23 | 1992-12-03 | B L Oototetsuku Kk | 棒状部材を被取付部材の挿通穴に挿入する装置及びその方法 |
| FR2700532B1 (fr) * | 1993-01-19 | 1995-03-03 | Potain Sa | Procédé de commande hybride position/force pour robot manipulateur. |
| JPH07246584A (ja) * | 1994-03-10 | 1995-09-26 | Nitta Ind Corp | 自動工具交換装置 |
| JPH08118281A (ja) * | 1994-10-25 | 1996-05-14 | Nitta Ind Corp | ロボット用リストコンプライアンス装置 |
| US5987726A (en) * | 1996-03-11 | 1999-11-23 | Fanuc Robotics North America, Inc. | Programmable positioner for the stress-free assembly of components |
| JPH11138487A (ja) * | 1997-11-05 | 1999-05-25 | Takahiro Hayakawa | リモートセンターコンプライアンス装置 |
| JP4696384B2 (ja) * | 2001-04-02 | 2011-06-08 | 株式会社安川電機 | パラレルリンクロボット |
| JP4929425B2 (ja) * | 2001-04-26 | 2012-05-09 | Smc株式会社 | コンプライアンスユニット |
| JP2005297106A (ja) * | 2004-04-08 | 2005-10-27 | Kondo Seisakusho:Kk | 位置決め誤差吸収装置 |
-
2006
- 2006-09-07 JP JP2006242660A patent/JP4976084B2/ja not_active Expired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107414787A (zh) * | 2017-03-24 | 2017-12-01 | 中国科学院长春光学精密机械与物理研究所 | 一种可防止支腿自转的6‑sps构型六自由度并联平台 |
| CN110712020A (zh) * | 2019-12-16 | 2020-01-21 | 天津航天机电设备研究所 | 柔性对接及快速定位系统 |
| CN110712020B (zh) * | 2019-12-16 | 2020-04-24 | 天津航天机电设备研究所 | 柔性对接及快速定位系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008062335A (ja) | 2008-03-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4976084B2 (ja) | 位置誤差吸収装置 | |
| CN108368916B (zh) | 直动伸缩机构 | |
| JP5225867B2 (ja) | ウェイトバランサ及びパイプ結合方法 | |
| US7673537B2 (en) | Parallel manipulator | |
| US8182010B2 (en) | Robot hand and humanoid robot having the same | |
| KR102206699B1 (ko) | 산업용 로봇 | |
| JP6164434B2 (ja) | エンドエフェクタ | |
| WO1996005947A1 (fr) | Machine a centre d'elasticite distant | |
| CN109048987B (zh) | 一种并联式柔性手腕机构 | |
| US20140069222A1 (en) | Umbilical member arrangement structure of parallel link robot | |
| KR101606075B1 (ko) | 병렬형 마이크로 로봇 및 이를 갖는 수술 로봇 시스템 | |
| KR101682358B1 (ko) | 가변 수동 강성 그리퍼 | |
| US10987816B2 (en) | Passive stiffness gripper | |
| JPH0811081A (ja) | 空間3および4自由度の駆動装置 | |
| KR101649108B1 (ko) | 관절 구조체 및 이를 구비한 로봇 | |
| US10399238B2 (en) | Robot having a base body, a shoulder joint mechanism assembly, and a movable link coupled to the base body through the shoulder joint mechanism assembly | |
| KR101688867B1 (ko) | 변위 측정이 가능한 수동 강성 그리퍼 및 가변 수동 강성 그리퍼 | |
| JPH0811080A (ja) | 空間3自由度の駆動装置 | |
| KR102448594B1 (ko) | 관절 장치 및 이를 포함하는 로봇 | |
| TWI763505B (zh) | 機器人的關節結構 | |
| Ma et al. | Design, Simulation and Implementation of a 3-PUU Parallel Mechanism for a Macro/mini Manipulator. | |
| JP7581834B2 (ja) | ロボットの関節構造 | |
| KR20240048245A (ko) | 직교 이동 작업이 가능한 다관절 로봇 | |
| KR101688866B1 (ko) | 가변 수동 강성 그리퍼를 이용한 조립 교시 방법 | |
| KR101517822B1 (ko) | 유연 관절 로봇 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090227 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100924 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110613 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110809 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20110809 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111108 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120110 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120327 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120412 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150420 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |