JP3681602B2 - Elevator confinement remote rescue device - Google Patents
Elevator confinement remote rescue device Download PDFInfo
- Publication number
- JP3681602B2 JP3681602B2 JP2000029456A JP2000029456A JP3681602B2 JP 3681602 B2 JP3681602 B2 JP 3681602B2 JP 2000029456 A JP2000029456 A JP 2000029456A JP 2000029456 A JP2000029456 A JP 2000029456A JP 3681602 B2 JP3681602 B2 JP 3681602B2
- Authority
- JP
- Japan
- Prior art keywords
- elevator
- car
- rescue
- confinement
- passenger
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images



















Landscapes
- Indicating And Signalling Devices For Elevators (AREA)
- Maintenance And Inspection Apparatuses For Elevators (AREA)
Description
【0001】
【発明の属する技術分野】
本発明は乗客がエレベーターかご内に閉じ込められた時、遠隔にある監視装置での操作によりエレベーターとその周辺の機器を制御して乗客を救出するエレベーターの閉じ込め遠隔救出装置に関するものである。
【0002】
【従来の技術】
エレベーターのかご内に乗客が閉じ込められた場合に、従来の乗客救出方法をエレベーターの概略構成を示す図20を参照しながら説明する。同図において、1は乗客を乗せるかご、2はかご1内の通話装置、4はサービスセンタ内に設置された監視装置、3は電話回線Tを通じてかご1の通話装置に接続された監視装置4の通話装置、5は機械室に設置されたエレベーター運転制御盤、6はかご1を吊り下げるロープ、7はロープ6のかご1と反対側に吊り下げられた吊合い錘である。
【0003】
何らかの故障によりエレベーターのかご1内に乗客が閉じ込められた場合に、乗客はかご1内の通話装置2を使用してサービスセンタ内の監視装置4にある通話装置3へ通報する。サービスセンタ内の監視装置4ではかご1内に乗客から通報を受けると、現地のエレベーターへ保守員を出動させるが、一般的には、保守員が現地のエレベーターに到着するまでにはある程度時間が掛かるので、軽微な故障でエレベーターが停止した場合であっても、乗客はかご1内に長い間閉じ込められた儘になってしまう。
【0004】
そこで、かご内の乗客を早急に救出するための技術開発が行われ、例えば、特開平6−298462公報には、かご内に手動でエレベーターを低速走行させる運転釦を設け、かご内に閉じ込められた乗客が監視センタからの指示に従って運転釦を操作することによって、かご側の扉と乗場側の扉が係合する領域(以下、扉ゾーンと呼ぶ)内の位置、即ち、かご扉を開ければ連動して乗場扉が開き、乗場とかごとの間に段差はあるものの、かご内から乗場に脱出できる位置まで、かごを低速走行させ、その後、かご扉と乗場扉を開いて乗客が乗場に自力脱出できるようにした発明が開示されている。
また、特開平4−266378号公報には、エレベーターの異常が検出された時、かごに乗客が載っていた場合は、監視センタからのリセット指令に基づいてリセット手段が動作し、乗客救出運転により乗客を救出してから点検運転を行い、異常が検出されなければ通常運転に復帰することにより、乗客の缶詰事故と機器の重大な破損とを防止するようにした発明が開示されている。
【0005】
【発明が解決しようとする課題】
前者の従来技術においては、エレベーターが異常停止してかご内に閉じ込められた乗客より異常通報を受けたとき、サービスセンタ側では、かごが扉ゾーン内に停止しているのか、扉ゾーンを外れた階床間に停止したのかを把握するための情報は受信しているが、その外のエレベーターを安全に走行させることができるか否か、あるいは、乗客の安全を確保した状態で救出運転できるか否かを判断するための情報は受信していないので、かごの低速走行による救出運転を行ってよいのか否かをサービスセンタ側で的確に判定することが困難である。
【0006】
また、後者の従来技術においても、エレベーターが異常停止した時、サービスセンタ側でエレベーターを安全に走行させることができるか否か、あるいは、乗客の安全を確保した状態で救出運転できるか否かを判断することなくエレベーターの救出運転を行うことになるので、機器の重大な故障や人身事故の発生を招く虞がある。
【0007】
本発明の目的は、乗客がかご内に閉じ込められ、または閉じ込められていると思われる状況下において、エレベーターの救出動作を実行すべきか否かを監視センタ側で的確に判定することにより、機器の重大な故障や人身事故の発生を招く虞が無く、かご内に閉じ込められた乗客を安全かつ迅速に救出できるエレベーターの閉じ込め遠隔救出装置を提供することにある。
【0008】
【課題を解決するための手段】
上記目的は、エレベーターに付設され、該エレベーターの動作データを収集して、その動作状態を監視する端末装置と、昇降路内に昇降可能に納められたかごの速度が異常に速いことを検出する過速度検出装置等の異常検出手段がエレベーターの重大異常を検出した時、エレベーターを非常停止させる安全装置と、前記かごを低速で走行させるための低速運転手段を含む乗客救出手段と、前記端末装置から取り込んだエレベーターの運転情報を電話回線を介してサービスセンタの監視装置に送信する通信手段とを具えて、非常停止した前記かご内に閉じ込められた乗客の救出を前記監視装置側からの指令に基づいて行うようにしたエレベーターの閉じ込め遠隔救出装置において、前記監視装置に、電話回線を介して遠隔から前記乗客救出手段を動作させる遠隔操作手段と、前記端末装置から通信回線を介して取り込んだエレベーターの運転情報に基づいてエレベーターの状態を表示する状態表示手段と、前記端末装置から通信回線を介して取り込んだエレベーターの運転情報に基づいてエレベーターの閉じ込め事故の発生原因を判定する閉じ込め事故原因判定手段と、この閉じ込め事故原因判定手段が判定したエレベーターの閉じ込め事故の発生原因が、運転制御盤の制御電源の過電流、過電圧を電源状態検出装置により検出したものであった時に、かごの上下位置がかご扉と乗場扉が係合可能な扉ゾーンに無ければ救出動作否と判定する救出動作可否判定手段とを設けて構成したことにより達成される。
【0009】
そして、好ましくは、閉じ込め事故原因判定手段が判定したエレベーターの閉じ込め事故の発生原因に基づいて、かご内に閉じ込められた乗客の救出を行う乗客救出動作の可否を判定する救出動作可否判定手段および閉じ込め事故原因判定手段が判定したエレベーターの閉じ込め事故の発生原因を表示する事故原因表示手段を監視装置に有し、該監視装置を監視する監視員は前記事故原因表示手段が表示した事故原因に基づいて遠隔操作手段を操作して、遠隔から乗客救出手段を動作させるようにしたものである。
【0010】
さらに、閉じ込め事故原因判定手段が判定したエレベーターの閉じ込め事故の発生原因が安全装置の動作によるものであった時に、異常検出手段の異常検出動作を無効にする異常検出無効手段を乗客救出手段に有し、かごの上下位置がかご扉と乗場扉が係合可能な扉ゾーン内に無かった時に、監視装置を監視する監視員が遠隔操作手段を操作して、遠隔から乗客救出手段の異常検出無効手段および低速運転手段を動作させてエレベーターを低速運転走行できるようにしても良い。
【0011】
【発明の実施の形態】
以下、本発明の一実施例を図に基づいて説明する。図1は本発明の実施例の構成をエレベーター装置の概略構成と共に示す構成図である。
同図において、1はロープ6に吊り下げられたかご、2はかご1内の通話装置、3は電話回線Tを通じてかご1内の通話装置2に接続されたサービスセンタ内の監視装置4の通話装置、5は機械室に設置されエレベーターの動きを制御する運転制御盤、7はロープ6のかご1と反対側に吊り下げられた吊合い錘、8は任意の階床の乗場、9は乗場8に開閉可能に設けられた乗場扉、10はかご1が走行する昇降路、36はかご1を昇降するための巻上げユニット、20は巻上げユニット36に付設される電磁ブレーキ、21はかご1の速度超過を検出する過速度検出装置、22は昇降路10内におけるかご1の上昇を所定位置で制限するための上昇制限スイッチ、23は昇降路10内におけるかご1の下降を所定位置で制限するための下降制限スイッチ、25は乗場扉9が閉じていることを検出する乗場扉閉スイッチ、26はかご1の前面側のかご扉、27はかご扉26が閉じていることを検出するかご扉閉スイッチである。
【0012】
また、11はエレベーター運転制御盤5に付設され、かご1内の室内灯等と同様に別電源から電力供給される救出制御装置、12は運転制御盤5に接続され、運転制御盤5からエレベーターの安全装置の動作状況やかご1の停止位置、乗場扉9やかご扉26の開閉状態およびかご1内の呼び登録釦の動作状態等のエレベーターの情報に基づいて閉じ込め故障が発生したことを検出して、電話回線Tを介してサービスセンタ内の監視装置4に閉じ込め故障の発生を発報する端末装置である。
【0013】
そして、救出制御装置11の内部構成を示す符号において、14はエレベーター制御電源の遮断・投入により、エレベーターの動作を制御するマイクロコンピュータをリセットする電源断続部、15は過速度検出装置21、乗場扉閉スイッチ25、かご扉閉スイッチ27等の安全装置の回路を短絡する安全装置回路短絡部、16はエレベーターを低速で走行させる低速運転を指令する低速運転指令部、17は電磁ブレーキ20を開放する電磁ブレーキ開放部である。
【0014】
一方、サービスセンタ内の監視装置4の内部構成としては、18は監視装置4の主要部を成す監視部、37は端末装置12から閉じ込め故障の発報があった際に、エレベーターの運転制御盤5から出力されたエレベーターの動作状態情報を蓄えた端末装置12から電話回線Tを介して読み出して表示するエレベーター状態表示部、13は端末装置12により検出されたエレベーターの閉じ込め故障の原因を、エレベーターの上記動作状態情報に基づいて判定する閉じ込め原因判定部、19は電話回線Tを介して救出制御装置11に接続され、救出制御装置11内の各部14〜17を遠隔から操作する遠隔操作部である。
【0015】
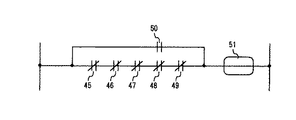
図19は安全装置回路短絡部15の内部回路を示す回路図である。同図において、45〜49は過速度検出装置21、上昇制限スイッチ22、下降制限スイッチ23、乗場扉閉スイッチ25、かご扉閉スイッチ27等の安全装置の常閉接点、50は常閉接点45〜49の直列回路に並列に接続された救出制御用常開接点、51は常閉接点45〜49の直列回路に直列に接続されたエレベーター走行用リレーである。
【0016】
この回路構成から明らかなように、常閉接点45〜49の中、一つでも開動作すると、エレベーター走行用リレー51が消勢される回路となっており、エレベーターの制御回路はこのエレベーター走行用リレー51が消勢することによりエレベーターを停止させる構成となっている。救出制御用常開接点50は端末装置12を介してサービスセンタ内の監視装置4に接続されており、遠隔から救出制御を行う時は救出制御用常開接点50を閉成することにより、安全装置の常閉接点45〜49を擬似的に短絡させて、上述の安全装置が動作した場合でもエレベーター走行用リレー51を強制的に付勢できるようにしてある。
【0017】
次に、本実施例の動作を説明する。図2〜図14は監視装置4の監視部18により行われる閉じ込め原因判定・乗客救出処理の内容を示すフローチャートである。
以下、これらの図を参照して閉じ込め原因判定・乗客救出処理の詳細を説明する。まず、図2のステップ10では運転制御盤5の制御により、エレベーターの通常走行運転が行われる。端末装置12は過速度検出装置21等の安全装置の動作状況やかご1の停止位置、乗場扉9やかご扉26の開閉状態およびかご1内の後述するかご呼び釦の動作状態などのエレベーターの動作情報に基づいてエレベーターが正常に運転されているか否かを監視する。
【0018】
ステップ20では、エレベーターの運転中に閉じ込め故障が発生すると、端末装置12は上記動作情報に基づいて、かご1内に乗客が閉じ込められたことを判断し、電話回線Tを介してサービスセンタ内の監視装置4に対して閉じ込め発生の発報を行う。閉じ込め発報は、かご1内の乗客がかご1内の通話装置2を用いて直接サービスセンタ内の監視装置4の通話装置3に連絡することにより為される場合もある。発報を受信したサービスセンタ内の監視装置4の閉じ込め原因判定部13は、エレベーターの動作状態情報をエレベーター状態表示部37に表示させると共に、エレベーターの閉じ込め故障の原因を解析する。
【0019】
図18は監視部18の表示画面を示す説明図である。同図において、以下の符号は監視部18の表示画面DSに表示される表示欄を示しており、40はエレベーターの運転制御盤5から読み出したエレベーターの動作状態情報からかご1の位置や呼び登録状況を表示する登録状況表示部、41は動作確認用や安全用の各スイッチの動作状態を示すスイッチ動作表示部、42は故障の内容を示す故障内容表示部、43は閉じ込め原因判定部13で判定した閉じ込め故障原因を表示する故障原因表示部であり、これらがエレベーター状態表示部37を構成している。また、44は故障原因表示部43に表示された故障原因に従って、監視員が救出制御装置11へ指令を与えるための表示操作スイッチであり、遠隔操作部19を構成している。この表示画面DSでは、かご1が6階附近の扉ゾーン外で停止し、閉じ込め故障の原因は安全装置が動作したためであると判定され、操作スイッチ44に安全装置回路短絡の押スイッチが選択されている例を示している。
【0020】
サービスセンタの監視員は、上記故障原因表示部43に表示された故障原因を認識すると共に、監視装置4の通話装置3を使用して、かご1内の通話装置2を使って乗客と会話し、乗客の話やかご1内の状況から乗客が閉じ込められている状況を認識して、監視装置4からの指令や指示により乗客の救出が可能と判断した場合は、遠隔操作部19の操作によって救出制御装置11に対してエレベーターを遠隔制御するための指令を電話回線Tを介して送信したり、通話装置2,3を使用して、かご1内の乗客に対策を指示して乗客を救出する。
【0021】
以下のステップでは、閉じ込め原因判定部13の判定処理の内容を中心に閉じ込め原因判定・乗客救出処理の詳細を説明する。ステップ30ではエレベーターに電源が供給されているか否かを判定する。エレベーターに電源が供給されていない場合はステップ 900に進み、救出不可能であるためこの処理を終了する。エレベーターに電源が供給されている場合はステップ100 に進み、かご1内の後述する運転盤の誤操作か否かを判定する。運転盤の誤操作の場合は、図3のステップ101 に進み、サービスセンタ内の監視装置4の通話装置3を使用して、かご1内の通話装置2を通じて乗客に運転盤のスイッチを正常な状態に戻してもらうように指示する。続いてステップ102 において、エレベーターが最寄階まで走行してかご扉26が開いたか否かを判定する。開いた場合はかご1内の運転盤の誤操作が原因で閉じ込め故障が発生したものと判断して救出完了(ステップ103 )とし、エレベーターを平常の運転に復帰させる(ステップ104 )。ステップ102 で、かご扉26が開かなかった場合は救出不可能(ステップ105 )として処理を終了する。
【0022】
図2のステップ100 において運転盤の誤操作でない時は、ステップ200 に進み、巻上げユニット36を制御する運転制御回路に流れる電流及び印加される電圧が電源回路中の部品の故障等により、規定以上の値となっているかどうかを判定する。ステップ200 で過電流、過電圧を検出した場合は、エレベーターの電源供給を断続させたりエレベーターを運転制御回路により走行させると、建物側の電源系統に悪影響を及ぼす可能性がある。
【0023】
そこで、運転制御回路に流れる電流及び印加される電圧が規定以上の値であれば、図4のステップ201 に進み、サービスセンタ内の監視装置4の通話装置3を使用して、かご1内の通話装置2を通じて乗客にがご1内のかご扉26を開けるための後述する扉開釦を押してもらうように指示し、ステップ202 でかご扉26が開いたかを判定する。開いた場合は、救出完了(ステップ203 )として処理を終了する。
【0024】
ステップ202 で、かご扉26が開かなかった場合は、ステップ204 で、かご1が乗場扉9と、かご扉26が係合できる位置にあるかどうか、即ち、エレベーターが扉ゾーン内にあるかどうかを判定する。その判定結果が扉ゾーン内にあると判定した場合は、図5のステップ40に進み、かご1内の乗客に手動でかご扉26を開けてもらうために、かご1が扉ゾーン内にあるかどうかを再確認してもらう処理を行う。続いてステップ41において、サービスセンタ内の監視装置4の遠隔操作部19から救出制御装置11の電源断続部14に対して動作指令を送信して、エレベーターの駆動系制御電源を遮断し、かご扉26を閉じ付勢している駆動力を解除する。
【0025】
次に、ステップ42において、サービスセンタ内の監視装置4の通話装置3から、かご1内の通話装置2を通じて、乗客に手でかご扉26を開けてもらうように指示する。そして、ステップ43において、かご扉閉スイッチ27の検出信号を見て、かご扉26が開いたか否かを判定し、開いた場合は救出完了(ステップ44)、開かなかった場合は救出不可能(ステップ45)として処理を終了する。
【0026】
ステップ204 において扉ゾーン外と判定した場合は、図6のステップ50に進んで、電磁ブレーキ20を開放することによってエレベーターを最寄の階まで走行させて、かご1内の乗客を救出するために、エレベーター状態表示部37に表示したエレベーター動作状態情報に基づいて、扉ゾーン検出信号やエレベーターの速度検出信号が正常に検出できる状態にあり、かつ、電磁ブレーキ20を開放してエレベーターを走行させてもよい状態にあることを確認する。
【0027】
次に、ステップ51に進み、サービスセンタ内の監視装置4の遠隔操作部19の操作により、救出制御装置11の低速運転指令部16に対して動作指令を送信し、エレベーターを低速運転モードに切り替えさせる。ここでエレベーターの運転を低速運転モードに切り替えるのは、平常運転モードで電磁ブレーキを開放して救出運転している中に、万一故障が復旧すると、閉じ込め発生原因を残した儘エレベーターが運転制御回路による走行に切り替わって再度故障を誘発する可能性があるためである。
【0028】
続いてステップ52において、サービスセンタ内の監視装置4の遠隔操作部19の操作により、救出制御装置11の電磁ブレーキ開放部17に対して動作準備指令を送信する。そして、ステップ53において、サービスセンタ内の監視装置4の通話装置3を使用して、かご1内の通話装置2を通じて乗客にがご1内の最寄り階へのかご呼び釦を押してもらうように指示する。これにより、電磁ブレーキ20が開放され、エレベーターが走行したかを否かを判定し、動いた場合は、ステップ54に進んで、かご1が最寄階に到着したか否かを判定する。その判定結果が否ならば、かご1が最寄階に到着するまで電磁ブレーキ20を開放し続ける。
【0029】
かご1が最寄階に到着した場合は、ステップ55において、サービスセンタ内の監視装置4の遠隔操作部19の操作により、救出制御装置11の電磁ブレーキ開放部17に対して動作解除指令を送信する。続いてステップ56で、監視装置4の遠隔操作部19から救出制御装置11の電源断続部14に対して動作指令を送信してエレベーターの電源を遠隔で遮断する。次に、ステップ57において、遠隔操作部19の操作により、救出制御装置11の低速運転指令部16に対して動作解除指令を送信し、エレベーターを平常運転モードに切り替える。
【0030】
続いて、ステップ58において、監視装置4の通話装置3を使用して、かご1内の通話装置2を通じて乗客に話し掛け、乗客に手でかご扉26を開けてもらうように指示する。ステップ59では、これによりかご扉26が開いたか否かを判定し、かご扉26が開いた場合は、救出完了(ステップ60)として処理を終了する。また、ステップ53において,かご1内の重量と吊合い錘7の重さがほぼ同量でエレベーターが動かなかった場合は、救出不可能(ステップ61)として乗客を救出せずに処理を終了する。
【0031】
ステップ200 おいて過電流、過電圧を検出していない場合は、ステップ300 へ進み、かご1の図示しない位置検出装置が故障しているか否かを判定する。位置検出装置が故障している場合は、図7のステップ301 に進み、エレベーターが昇降路10内上部の上昇制限スイッチ22又は下部の下降制限スイッチ23が動作した位置で停止しているか否かを判定する。これは、かご1の位置検出ができない場合でも、かご1が昇降路10の最下位置まで下降し、又は最上位置まで上昇すると、最下階又は最上階の乗場8に着床できるからである。
【0032】
ステップ301 で、かご1が最上位置又は最下位置である端階にあると判定されると、ステップ302 に進み、監視装置4の遠隔操作部19の操作により、救出制御装置11の電源断続部14に対して動作指令を送信してエレベーターの電源を遠隔で断続させる。その後、図5のステップ40に進み、かご1内の乗客に手動でかご扉26を開けてもらうための前述のステップ41以下の処理を実行する。ステップ301 で、かご1が端階にない場合は、救出不可能(ステップ303 )として処理を終了する。
【0033】
図2のステップ300 おいて、かご1の位置検出装置が故障していない場合は、ステップ400 に進み、エレベーターの運転制御用マイクロコンピュータが異常となり、エレベーターが動作不可能になっているか否かを判定する。マイクロコンピュータが異常となっている場合は、図8のステップ401 へ進み、サービスセンタ内の監視装置4の遠隔操作部19の操作により、救出制御装置11の制御電源断続部14に対して動作指令を送信し、エレベーターの制御電源を断続させる。これは、このような断続処理を行うことにより、マイクロコンピュータが正常に復帰する場合があるからである。続いてステップ402 において、マイクロコンピュータが復旧したか否かを判定する。マイクロコンピュータが復旧しなかった場合は、救出不可能(ステップ406 )として処理を終了する。
【0034】
一方、マイクロコンピュータが復旧した場合は、ステップ403 に進み、かご扉26が開いたか否かを判定する。かご扉閉スイッチ27の検出信号を見て、かご扉26が開いた場合は、ステップ404 に進んで、救出完了後に他の乗客がエレベーターを利用するのを防止するために、監視装置4の遠隔操作部19の操作により、救出制御装置11の制御電源断続部14に対して動作指令を送信し、エレベーターの制御電源を遮断させることにより、救出完了(ステップ405 )として処理を終了する。
【0035】
一方、ステップ403 においてかご扉26が開かなかった場合は、ステップ407に進み、エレベーターが扉ゾーン内かどうかを判定する。扉ゾーン内の場合は、図5のステップ40に進み、かご1内の乗客に手動でかご扉26を開けてもらうための前述のステップ41以下の処理を実行する。また、ステップ407 においてエレベーターが扉ゾーン外の時は、ステップ408 に進み、エレベーターが最寄階へ走行するか否かを判定する。最寄階へ走行する場合は、ステップ409 に進み、エレベーターが最寄階に到着後、かご扉26が開いたか否かを判定する。かご扉26が開いた場合は、前述のステップ404 を経て救出完了(ステップ405 )として処理を終了し、かご扉26が開かなかった場合は、前述の図5のステップ40からの処理を行う。
【0036】
次に、ステップ408 においてエレベーターが最寄階へ走行しない場合および図2のステップ400 おいて、エレベーターの運転制御用マイクロコンピュータが異常となっていない場合はステップ500 に進み、乗場扉9が閉じていることを検出する乗場扉閉スイッチ25が閉成しているか否かを判定する。開成している場合は、図9のステップ501 に進み、エレベーターが扉ゾーン内にあるか否かを判定する。扉ゾーン外の場合は、乗場8側にいる人の人身事故の危険性があるので、救出不可能(ステップ506 )として処理を終了する。ステップ501 において扉ゾーン内の時は、ステップ502 に進み、監視装置4の遠隔操作部19から救出制御装置11の電源断続部14に対して動作指令を送信してエレベーターの電源を遠隔で断続し、続いてステップ503 において、かご扉26が開いたか否かを判定する。
【0037】
かご扉26が開いた時は、ステップ504 に進み、救出完了後に他の乗客がエレベーターを利用するのを防止するために、監視装置4の遠隔操作部19から救出制御装置11の電源断続部14に対して動作指令を送信してエレベーターの電源を遠隔で遮断し、救出完了(ステップ505 )として処理を終了するが、かご扉26が開かなかった場合は、図5のステップ40に進み、かご1内の乗客に手動でかご扉26を開けてもらうための前述のステップ41以下の処理を実行する。
【0038】
図2のステップ500 において乗場扉9が閉じていることを検出する乗場扉閉スイッチ25が閉成している時は、ステップ600 に進み、エレベーターの安全装置が動作しているか否かを判定する。安全装置の動作としては例えば、過速度検出装置21に異物が挟まったり、乗客が悪戯でかご1を上下に揺らす等の原因により発生する異常を誤検出した場合等がある。安全装置が動作している時は、図10のステップ601 に進み、安全装置の回路を短絡してエレベーターが走行可能か否かを判定する。この処理では、例えば閉じ込め発生直前のかご1の速度を検出し、速度超過を検出する過速度検出装置21が正規に動作したか否かを判定するものである。
【0039】
ステップ601 において安全装置の回路を短絡可能な場合は、ステップ602 に進むが、短絡が不可能な場合は、ステップ624 に進み、エレベーターが扉ゾーン内にあるか否かを判定する。扉ゾーン内の時は、図5のステップ40に進み、かご1内の乗客に手動でかご扉26を開けてもらうための前述のステップ41以下の処理を実行するが、扉ゾーン外の場合は、救出不可能(ステップ625 )として処理を終了する。
【0040】
ステップ602 では、監視装置4の遠隔操作部19から救出制御装置11の低速運転指令部16に対して動作指令を送信し、エレベーターを遠隔で低速運転モードに切り替えさせ、続いてステップ603 において、監視装置4の遠隔操作部19から救出制御装置11の安全装置回路短絡部15に対して動作指令を送信し、安全装置の回路を遠隔から短絡してエレベーターを運転可能な状態にする。
【0041】
次に、ステップ604 において監視装置4の遠隔操作部19から救出制御装置11の電源断続部14に対して動作指令を送信してエレベーターの電源を遠隔で断続し、その後、ステップ605 において、エレベーターが扉ゾーン内にあるか否かを判定する。扉ゾーン内の場合は、ステップ606 に進んで、監視装置4の遠隔操作部19から救出制御装置11の低速運転指令部16に対して動作解除指令を送信し、遠隔でエレベーターを平常運転モードに切り替え、続いてステップ607 において、かご扉26が開いたか否かを判定する。
【0042】
かご扉26が開いた場合は、ステップ608 に進み、救出完了後に他の乗客がエレベーターを利用するのを防止するために、監視装置4の遠隔操作部19から救出制御装置11の電源断続部14に対して動作指令を送信してエレベーターの制御電源を遠隔で遮断し、救出完了(ステップ609 )として処理を終了する。一方、かご扉26が開かなかった場合は、図5のステップ40に進み、かご1内の乗客に手動でかご扉26を開けてもらうための前述のステップ41以下の処理を実行する。
【0043】
また、ステップ605 においてエレベーターが扉ゾーン外にある場合は、ステップ610 に進み、昇降路10内上部の上昇制限スイッチ22が閉成しているか否かを判定する。上昇制限スイッチ22が閉成していない時は、ステップ611 において監視装置4の遠隔操作部19から救出制御装置11の低速運転指令部16に対して低速上昇運転指令を送信し、エレベーターを低速上昇運転準備状態にさせる。そして、ステップ612 において監視装置4の通話装置3を使用して乗客に話しかけ、乗客にがご1内のかご呼び釦を押してもらうように指示し、これによりエレベーターが走行したか否かを判定する。走行した場合は、ステップ613 に進んで最寄階に到着したか否かを判定する。その判定結果が否ならば、かご1が最寄階に到着するまでエレベーターの上昇運転を継続させる。
【0044】
ステップ612 において、かご呼び釦を押してもらってもエレベーターが走行しない場合は、ステップ619 において監視装置4の遠隔操作部19の操作により、救出制御装置11の低速運転指令部16に対して動作解除指令を送信し、さらに、ステップ620 において監視装置4の通話装置3を使用して乗客に話しかけ、乗客にがご1内のかご呼び釦から手を放すように指示する。そして、監視装置4の遠隔操作部19から救出制御装置11の電源断続部14に対して動作指令を送信してエレベーターの電源を遠隔で断続させる。
【0045】
次に、ステップ621 に進み、監視装置4の遠隔操作部19から救出制御装置11の低速運転指令部16に対して動作指令を送信し、エレベーターを遠隔で低速下降運転準備状態にさせる。続いて、ステップ622 において監視装置4の通話装置3を使用して乗客に話しかけ、乗客にかご1内のかご呼び釦を押してもらうように指示し、これによりエレベーターが走行したか否かを判定する。走行した場合は、前述したステップ613 に進み、エレベーターが走行しなかった場合は、救出不可能(ステップ623 )として処理を終了する。なお、ステップ610 において上昇制限スイッチ22が閉成している時は、エレベーターがこれ以上上昇することができないので、ステップ621 に進んで、次のステップ622 での処理により、上述のようにサービスセンタ内の監視装置4からエレベーターを遠隔で低速下降運転させる。
【0046】
次に、ステップ613 においてエレベーターが最寄階に到着した場合は、ステップ614 に進んで、監視装置4の遠隔操作部19の操作により、救出制御装置11の低速運転指令部16に対して低速運転解除指令を送信し、次のステップ615 でエレベーターを平常運転モードに切り替え、続いてステップ616 において、かご扉26が開いたか否かを判定する。かご扉26が開いた場合は、ステップ617 に進み、救出完了後に他の乗客がエレベーターを利用するのを防止するために、監視装置4の遠隔操作部19から救出制御装置11の電源断続部14に対して動作指令を送信してエレベーターの電源を遠隔で遮断し、救出完了(ステップ618 )として処理を終了し、かご扉26が開かなかった場合は、図5のステップ40に進み、かご1内の乗客に手動でかご扉26を開けてもらうための前述のステップ41以下の処理を実行する。
【0047】
図2のステップ600 において安全装置が動作していない時は、ステップ700 に進み、エレベーターが扉ゾーン内にあるか否かを判定する。扉ゾーン外の時は図11のステップ701 に進み、かご扉26が閉じていることを検出するかご扉閉スイッチ27が閉成し、かつ、かご扉閉スイッチ27よりも更に閉端にあり、かご扉26が閉まり切っていることを検出する閉端検出スイッチが閉成しているか否かを判定する。これらのスイッチが共に閉成している時は、ステップ702 において監視装置4の遠隔操作部19から救出制御装置11の電源断続部14に対して動作指令を送信してエレベーターの電源を遠隔で断続し、続いてステップ703 においてエレベーターが最寄階へ走行するか否かを判定する。最寄階へ走行する場合は、ステップ704 に進み、エレベーターが最寄階に到着したか否かを判定する。最寄階に到着した時は、ステップ705 に進み、かご扉26が開いたか否かを判定する。
【0048】
かご扉26が開いた時は、ステップ706 において、救出完了後に他の乗客がエレベーターを利用するのを防止するために、監視装置4の遠隔操作部19から救出制御装置11の電源断続部14に対して動作指令を送信してエレベーターの電源を遠隔で遮断し、救出完了(ステップ707 )として処理を終了するが、かご扉26が開かなかった場合は、図5のステップ40に進み、かご1内の乗客に手動でかご扉26を開けてもらうための前述のステップ41以下の処理を実行する。
【0049】
また、ステップ703 においてエレベーターが走行しなかった場合は、図12のステップ708 に進み、監視装置4の遠隔操作部19から救出制御装置11の低速運転指令部16に対して動作指令を送信し、エレベーターを遠隔で低速運転モードに切り替える。そして、ステップ709 に進み、サービスセンタ内の監視装置4からエレベーターの電源を遠隔で断続し、続いてステップ710 において、監視装置4の遠隔操作部19から救出制御装置11の低速運転指令部16に対して動作指令を送信し、エレベーターを遠隔で低速運転準備状態にさせる。この時のエレベーターの走行方向は、かご扉26周辺に異物が引っ掛かっている場合を考えて、エレベーター停止直前の運転方向と逆方向とする。
【0050】
続いて、ステップ711 において、監視装置4の通話装置3を使用して乗客に話しかけ、乗客にかご1内のかご呼び釦を押してもらうように指示し、これによりエレベーターが走行したか否かを判定する。走行した場合は、ステップ712 に進んで、エレベーターが最寄階に到着したか否かを判定し、その判断結果が否ならば、かご1が最寄階に到着するまでエレベーターの低速走行を継続させる。
【0051】
エレベーターが最寄階に到着した場合は、ステップ713 において監視装置4の遠隔操作部19の操作により、救出制御装置11の低速運転指令部16に対して低速運転解除指令を送信し、次のステップ714 でエレベーターを平常運転モードに切り替え、続いてステップ715 において、かご扉26が開いたか否かを判定する。かご扉26が開いた場合は、ステップ716 に進み、救出完了後に他の乗客がエレベーターを利用するのを防止するために、監視装置4の遠隔操作部19から救出制御装置11の電源断続部14に対して動作指令を送信してエレベーターの電源を遠隔で遮断し、救出完了(ステップ717 )として処理を終了し、かご扉26が開かなかった場合は、図5のステップ40に進み、かご1内の乗客に手動でかご扉26を開けてもらうための前述のステップ41以下の処理を実行する。
【0052】
一方、ステップ711 において乗客にかご1内のかご呼び釦を押してもらってもエレベーターが走行しない場合は、ステップ718 において監視装置4の遠隔操作部19の操作により、救出制御装置11の低速運転指令部16に対して低速運転解除指令を送信し、次のステップ719 で動作解除指令を送信し、エレベーターを平常運転モードに切り替え、図6のステップ50に進んで、電磁ブレーキ20を開放することによってエレベーターを最寄の階まで走行させて、かご1内の乗客を救出する前述のステップ60までの処理を実行する。
【0053】
また、前述した図11のステップ701 において、かご扉閉スイッチ27または閉端検出スイッチの何れかが閉成していなかった場合は、ステップ720 において、監視装置4の通話装置3を使用して、かご1内の通話装置2を通じて乗客に手でかご扉26を閉めてもらうように指示し、続いてステップ721 において、エレベーターが走行したか否かを判定する。走行した場合は、ステップ704 に進んで、エレベーターを最寄の階まで走行させて、かご1内の乗客を救出する前述のステップ707 までの処理を実行する。ステップ721 においてエレベーターが走行しなかった場合はステップ722 に進んで、監視装置4の通話装置3を使用して乗客に話しかけ、かご扉26が閉まっているかどうかを確認する。その結果、乗客からかご扉26が閉まっていないとの返事があった場合は救出不可能(ステップ723 )として処理を終了する。
【0054】
一方、乗客からかご扉26が閉まっているとの返事があった場合はステップ724 に進み、かご扉閉スイッチ27および閉端検出スイッチの何れとも閉成しているか否かを判定する。これらのスイッチが共に閉成している時は、ステップ702に戻って、エレベーターが最寄階へ低速走行して乗客を救出するステップ707 までの前述の処理を実行する。ステップ724 の判定結果が否ならば、かご扉閉スイッチ27および閉端検出スイッチの何れとも開成しているか否かを判定する(ステップ725 )。これらのスイッチが共に開成している時は、救出不可能(ステップ726 )として処理を終了する。
【0055】
また、かご扉閉スイッチ27および閉端検出スイッチの中、何れかが閉成している場合は、かご扉閉スイッチ27が開成し、閉端検出スイッチが閉成しているのか否かを判定する(ステップ727 )。その判定結果が否ならば、ステップ702に戻って、エレベーターが最寄階へ低速走行して乗客を救出するステップ707 までの前述の処理を実行する。かご扉閉スイッチ27が閉成し、閉端検出スイッチが開成している場合は、図13のステップ728 に移り、監視装置4からエレベーターを遠隔で低速運転モードに切り替え、続いてステップ729 において、監視装置4の遠隔操作部19から救出制御装置11の安全装置回路短絡部15に対して動作指令を送信し、かご扉閉スイッチ27の安全装置の回路を遠隔で短絡させる。
【0056】
そして、ステップ730 で、サービスセンタ内の監視装置4からエレベーターの電源を遠隔で断続し、続いてステップ731 において監視装置4の遠隔操作部19から救出制御装置11の低速運転指令部16に対して動作指令を送信し、エレベーターを遠隔で低速運転準備状態にさせる。この時のエレベーターの走行方向も、かご扉26周辺に異物が引っ掛かっている場合を考えて、エレベーター停止直前の運転方向と逆方向とする。続いて、ステップ732 において監視装置4の通話装置3を使用して乗客に話しかけ、乗客にがご1内のかご呼び釦を押してもらうように指示し、これによりエレベーターが走行したか否かを判定する。
【0057】
走行した場合は、ステップ733 においてエレベーターが最寄階に到着したか否かを判定し、その判定結果が否ならば、到着するまでエレベーターを低速で走行させる。エレベーターが最寄階に到着した場合は、ステップ734 で監視装置4の遠隔操作部19の操作により、救出制御装置11の低速運転指令部16に対して低速運転解除指令を送信し、次のステップ735 で監視装置4の遠隔操作部19から救出制御装置11の安全装置回路短絡部15に対して動作指令を送信し、かご扉閉スイッチ27の安全装置の回路短絡を遠隔で解除させる。次に、ステップ736 において監視装置4の遠隔操作部19から低速運転指令部16に対して動作指令を送信し、低速運転モードを解除してエレベーターを平常運転モードに切り替える。
【0058】
次に、ステップ737 において、かご扉26が開いたか否かを判定し、開いた場合はステップ738 に進み、救出完了後に他の乗客がエレベーターを利用するのを防止するために、監視装置4の遠隔操作部19から救出制御装置11の電源断続部14に対して動作指令を送信して、エレベーターの電源を遠隔で遮断し、救出完了(ステップ739 )として処理を終了する。一方、ステップ737 においてかご扉26が開かなかった場合は、図5のステップ40に移り、かご1内の乗客に手動でかご扉26を開けてもらうための前述のステップ41以下の処理を実行する。
【0059】
また、ステップ732 において乗客にかご1内のかご呼び釦を押してもらってもエレベーターが走行しない場合は、ステップ740 において監視装置4の遠隔操作部19の操作により、救出制御装置11の低速運転指令部16に対して低速運転解除指令を送信し、次のステップ741 で監視装置4の遠隔操作部19から救出制御装置11の安全装置回路短絡部15に対して動作指令を送信し、かご扉閉スイッチ27の安全装置の回路短絡を遠隔で解除する。次に、ステップ742 において監視装置4の遠隔操作部19から低速運転指令部16に対して動作指令を送信し、低速運転モードを解除してエレベーターを平常運転モードに切り替えた後、図6のステップ50に進んで、電磁ブレーキ20を開放することによってエレベーターを最寄の階まで走行させて、かご1内の乗客を救出する前述のステップ60までの処理を実行する。
【0060】
図2のステップ700 においてエレベーターが扉ゾーン内にある時は、図14のステップ801 に進み、サービスセンタ内の監視装置4からエレベーターの電源を遠隔で断続し、続いてステップ802 において、かご扉26が開いたか否かを判定する。かご扉26が開いた時は、ステップ803 に進み、救出完了後に他の乗客がエレベーターを利用するのを防止するために、監視装置4の遠隔操作部19から救出制御装置11の電源断続部14に対して動作指令を送信して、エレベーターの制御電源を遠隔で遮断し、救出完了(ステップ804 )として処理を終了する。一方、かご扉26が開かなかった場合は、ステップ805 に進んでサービスセンタ内の監視装置4からエレベーターの駆動系制御電源を遠隔で遮断し、かご扉26を閉じ付勢している駆動力を解除する。
【0061】
続いてステップ806 においてサービスセンタ内の監視装置4の通話装置3を使用して乗客に話し掛け、乗客に手でかご扉26を開けてもらうように指示する。次にステップ807 で、かご扉26が開いたか否かを判定し、開いた場合は救出完了(ステップ808 )として処理を終了し、開かなかった場合はステップ809 に進み、サービスセンタ内の監視装置4から低速運転指令部16に対して動作指令を送信し、エレベーターを遠隔で低速運転モードに切り替える。次に、ステップ810 で、サービスセンタ内の監視装置4から救出制御装置11の電源断続部14に対して動作指令を送信してエレベーターの制御電源を遠隔で投入させ、続いてステップ811 において監視装置4の遠隔操作部19から救出制御装置11の低速運転指令部16に対して動作指令を送信し、エレベーターを遠隔で低速運転準備状態にさせる。この時のエレベーターの走行方向も、かご扉26周辺に異物が引っ掛かっている場合を考えて、エレベーター停止直前の運転方向と逆方向とする。
【0062】
次に、ステップ812 において、監視装置4の通話装置3を使用して乗客に話しかけ、乗客にがご1内のかご呼び釦を押してもらうように指示し、これによりエレベーターが走行したか否かを判定する。走行した場合は、ステップ813 においてエレベーターが最寄階に到着したか否かを判定し、その判定結果が否ならば、到着するまでエレベーターを低速で走行させる。エレベーターが最寄階に到着した場合は、ステップ814 で監視装置4の遠隔操作部19の操作により、救出制御装置11の低速運転指令部16に対して低速運転解除指令を送信し、次のステップ815 でサービスセンタ内の監視装置4から低速運転指令部16に対して動作指令を送信し、低速運転モードを解除してエレベーターを平常運転モードに切り替えさせる。
【0063】
そして、ステップ816 において、かご扉閉スイッチ27の検出信号を見て、かご扉26が開いたか否かを判定し、開いた場合はステップ817 において、救出完了後に他の乗客がエレベーターを利用するのを防止するために、監視装置4の遠隔操作部19から救出制御装置11の電源断続部14に対して動作指令を送信して、エレベーターの制御電源を遠隔で遮断し、救出完了(ステップ818 )として処理を終了する。ステップ816 において、かご扉26が開かなかった場合は、図5のステップ40に移り、かご1内の乗客に手動でかご扉26を開けてもらうための前述のステップ41以下の処理を実行する。
【0064】
また、ステップ812 において、乗客にかご1内のかご呼び釦を押してもらってもエレベーターが走行しない場合は、ステップ819 において監視装置4の遠隔操作部19の操作により、救出制御装置11の低速運転指令部16に対して低速運転解除指令を送信し、次のステップ820 でサービスセンタ内の監視装置4から低速運転指令部16に対して動作指令を送信し、低速運転モードを解除してエレベーターを平常運転モードに切り替えた後、図6のステップ50に進んで、電磁ブレーキ20を開放することによってエレベーターを最寄の階まで走行させて、かご1内の乗客を救出する前述のステップ60までの処理を実行する。
【0065】
次に、上述した実施例において、エレベーターをサービスセンタ内の監視装置4から遠隔でエレベーターを低速で走行させる時に、かご1内に閉じ込められた乗客の安全確保と意思表示を確認して乗客に低速運転を指示する方法を図15〜図17を用いて説明する。図15および図16は共にかご1内にある運転盤を示す正面図であり、特に、図16は乗客が乗客が低速運転のための操作を行っている状態を示している。これらの図において、28は扉開釦、29は扉閉釦、30〜35はかご呼び釦である。本実施例では運転盤上の離れた釦を同時に押すことにより、エレベーターの低速運転が許可されるようになっている。即ち、図16に示すように、扉閉釦29と1階かご呼び釦35を同時に押すと、エレベーターの低速運転が許可される。
【0066】
以下に、エレベーターの低速運転の動作を図17のフローチャートを用いて説明する。本実施例では乗客の救出手段として、かご扉閉スイッチ27の回路を短絡して救出する方法を採用している。そこで、ステップ2000において、かご扉閉スイッチ27の回路を短絡しているかどうか否かを判定する。短絡していない場合は処理を終了するが、かご扉閉スイッチ27を短絡している場合は、ステップ2001において扉閉釦29及び1階かご呼び釦35の入力が同時にあるか否かを判定する。その結果、何れかの入力が無い場合は、処理を終了する。扉閉じ釦29及び1階かご呼び釦35の両方の入力がある場合は、ステップ2002において低速運転を許可する。
【0067】
このように、扉閉釦29と1階かご呼び釦35のように、空間的に離れた釦を同時に押さなければエレベーターが低速走行しないように設定すると、図16に示すように、乗客は運転盤上の釦を操作するために両方の手を使用することになり、かご扉26が開いた儘エレベーターを走行させた時に、かご扉26の隙間から乗客が手を出したことによる人身事故の発生を防止することができる。
【0068】
【発明の効果】
以上説明したように請求項1記載の発明によれば、電話回線を介して遠隔から乗客救出手段を動作させる遠隔操作手段と、端末装置から通信回線を介して取り込んだエレベーターの運転情報に基づいてエレベーターの閉じ込め事故の発生原因を判定する閉じ込め事故原因判定手段とを監視装置に有したので、何らかの故障によりエレベーターのかご内に乗客が閉じ込められてしまった場合に、エレベーターの救出動作を実行すべきか否かを監視センタ側で的確に判定することにより、機器の重大な故障や人身事故の発生を招く虞が無く、かご内に閉じ込められた乗客を安全かつ迅速に救出することができる。
【0069】
請求項2記載の発明によれば、閉じ込め事故原因判定手段が判定したエレベーターの閉じ込め事故の発生原因に基づいて、かご内に閉じ込められた乗客の救出を行う乗客救出動作の可否を判定する救出動作可否判定手段を監視装置に有したので、監視装置を監視する監視員が経験の乏しい者であっても、乗客救出動作の可否に関する的確な判定情報を得ることができる。
請求項3記載の発明によれば、閉じ込め事故原因判定手段が判定したエレベーターの閉じ込め事故の発生原因を表示する事故原因表示手段を監視装置に有し、該監視装置を監視する監視員は事故原因表示手段が表示した事故原因に基づいて遠隔操作手段を操作して、遠隔から乗客救出手段を動作させるようにしたので、監視員は事故原因表示手段が表示した事故原因を直ちに視認して遠隔操作手段を操作できるから、かご内に閉じ込められた乗客を一層速やかに救出することができる。
【0070】
請求項4記載の発明によれば、閉じ込め事故原因判定手段が判定したエレベーターの閉じ込め事故の発生原因が安全装置の動作によるものであった時に、異常検出手段の異常検出動作を無効にする異常検出無効手段を乗客救出手段に有したので、安全装置の動作により非常停止したエレベーターの停止動作を解除させて救出運転させることができる。
請求項5記載の発明によれば、エレベーターの閉じ込め事故の発生原因が、運転制御盤の制御電源の過電流または過電圧を検出したことによるものであった時に、救出動作可否判定手段はかごの上下位置がかご扉と乗場扉が係合可能な扉ゾーン内か否かにより乗客救出動作の可否を判定するようにしたので、電源を断続させたり救出運転を行うと、建屋側の電源系統やエレベーター機器に重大な故障が発生するのを防止できる。
【0071】
請求項6記載の発明によれば、かごの上下位置がかご扉と乗場扉が係合可能な扉ゾーン内に無く、エレベーターが走行できなかった時、監視装置を監視する監視員が遠隔操作手段を操作して、遠隔から乗客救出手段のブレーキ開放手段を動作させることができるようにしたので、遠隔から電磁ブレーキを開放してかごと吊合い錘との重量差によりエレベーターを最寄り階まで移動させることができるから、閉じ込められた乗客を速やかに救出することができる。
請求項7記載の発明によれば、エレベーターの閉じ込め事故の発生原因が安全装置の動作によるものであり、かごの上下位置がかご扉と乗場扉が係合可能な扉ゾーン内に無かった時に、監視装置を監視する監視員が遠隔操作手段を操作して、遠隔から乗客救出手段の異常検出無効手段および低速運転手段を動作させてエレベーターを低速運転走行できるようにしたので、監視員は安全装置の動作により非常停止したエレベーターの停止動作を遠隔から解除させて、低速運転によりエレベーターを最寄り階まで移動させることができるから、閉じ込められた乗客を速やかに救出することができる。
【0072】
請求項8記載の発明によれば、異常検出手段はエレベーターの重大異常を検出した時に開成する異常検出スイッチであり、安全装置は複数の該異常検出スイッチとエレベーター走行用リレーとの直列回路から成り、異常検出無効手段は該直列回路に並列接続される常開接点を閉成するものとしたので、安全装置を簡単かつ安価に構成することができる。
請求項9記載の発明によれば、異常検出無効手段はかご内に配設された運転制御盤上に設けられた複数の操作釦の中の互いに離れた位置にある二つの操作釦の押操作により動作するものとしたので、かご扉が開いた状態で乗客が当該二つの操作釦の押操作してエレベーターを低速走行運転した時に、誤って乗客の手がかご扉外に出たことによる人身事故の発生を防止できる。
【図面の簡単な説明】
【図1】本発明の実施例の構成をエレベーター装置の概略構成と共に示す構成図
【図2】本発明の実施例の閉じ込め原因判定・乗客救出処理の主フローチャート
【図3】図2のサブルーチンのフローチャート
【図4】図2のサブルーチンのフローチャート
【図5】図4のサブルーチンのフローチャート
【図6】図4のサブルーチンのフローチャート
【図7】図2のサブルーチンのフローチャート
【図8】図2のサブルーチンのフローチャート
【図9】図2のサブルーチンのフローチャート
【図10】図2のサブルーチンのフローチャート
【図11】図2のサブルーチンのフローチャート
【図12】図11のサブルーチンのフローチャート
【図13】図11のサブルーチンのフローチャート
【図14】図2のサブルーチンのフローチャート
【図15】かご内の運転盤の正面図
【図16】エレベーターの低速運転を指示操作する時のかご内の運転盤の正面図
【図17】エレベーターの低速運転指示操作時のフローチャート
【図18】監視部の表示画面を示す説明図
【図19】安全装置回路短絡部の内部回路を示す回路図
【図20】従来のエレベーターの概略を示す構成図
【符号の説明】
1 かご
2,3 通話装置
4 監視装置
5 運転制御盤
6 ロープ
7 吊合い錘
8 乗場
9 乗場扉
10 昇降路
11 救出制御装置
12 端末装置
13 閉じ込め原因判定部
14 電源断続部
15 安全装置回路短絡部
16 低速運転指令部
17 電磁ブレーキ開放部
18 監視部
19 遠隔操作部
20 電磁ブレーキ
21 過速度検出装置
22 上昇制限スイッチ
23 下降制限スイッチ
25 乗場扉閉スイッチ
26 かご扉
27 かご扉閉スイッチ
28 扉開釦
29 扉閉釦
30〜35 かご呼び釦
37 エレベーター状態表示部
40 登録状況表示部
41 スイッチ動作表示部
42 故障内容表示部
43 故障原因表示部
44 表示操作スイッチ
45〜49 常閉接点
50 救出制御用常開接点
51 エレベーター走行用リレー
T 電話回線
DS 監視部画面[0001]
BACKGROUND OF THE INVENTION
The present invention relates to an elevator confinement remote rescue apparatus for controlling an elevator and its peripheral devices by a remote monitoring device to rescue the passenger when the passenger is confined in an elevator car.
[0002]
[Prior art]
When a passenger is confined in the elevator car, a conventional passenger rescue method will be described with reference to FIG. 20 showing a schematic configuration of the elevator. In the figure, 1 is a car carrying passengers, 2 is a call device in the
[0003]
When a passenger is trapped in the
[0004]
In view of this, technical development has been carried out to promptly rescue passengers in the car. For example, Japanese Patent Application Laid-Open No. 6-298462 provides an operation button for manually running an elevator at a low speed in the car, and is confined in the car. When the passenger operates the operation button according to the instruction from the monitoring center, the position in the area where the car door and the landing door engage (hereinafter referred to as the door zone), that is, the car door is opened. Although the landing door opens in conjunction with the difference between the landing and the car, the car is run at a low speed from the inside of the car to a position where it can escape to the landing, and then the car door and the landing door are opened, and the passengers are forced to enter the landing. An invention is disclosed that allows escape.
Further, in Japanese Patent Laid-Open No. 4-266378, when an abnormality of the elevator is detected, if a passenger is on the car, the reset means operates based on the reset command from the monitoring center, and the passenger rescue operation An invention is disclosed in which the inspection operation is performed after the passenger is rescued, and the normal operation is resumed if no abnormality is detected, thereby preventing the canned accident of the passenger and the serious damage of the equipment.
[0005]
[Problems to be solved by the invention]
In the former prior art, when the elevator was abnormally stopped and an abnormality report was received from a passenger trapped in the car, the service center side left the door zone as to whether the car was stopped in the door zone. I have received information to know if it has stopped between the floors, but can I drive the elevator outside of it safely, or can I perform rescue operation while ensuring the safety of passengers? Since no information for determining whether or not the rescue operation by the low-speed running of the car may be performed, it is difficult to accurately determine whether or not the service center side can perform the rescue operation.
[0006]
Also, in the latter prior art, when the elevator stops abnormally, whether the service center can safely run the elevator, or whether the rescue operation can be performed while ensuring the safety of the passengers. Since the rescue operation of the elevator is performed without making a judgment, there is a possibility of causing a serious breakdown of the equipment or a personal injury.
[0007]
The object of the present invention is to accurately determine whether or not the rescue operation of the elevator should be executed in a situation where the passenger is confined in or appears to be confined in the car. It is an object of the present invention to provide an elevator confinement remote rescue device that can safely and quickly rescue a passenger confined in a car without causing a serious breakdown or a personal injury.
[0008]
[Means for Solving the Problems]
The above-mentioned purpose is a terminal device attached to an elevator, collecting the operation data of the elevator, and monitoring the operation state thereof, and the speed of a car that can be moved up and down in the hoistway. But Passengers including a safety device for emergency stop of the elevator when an abnormality detection means such as an overspeed detection device that detects abnormally fast detects a serious abnormality of the elevator, and a low speed driving means for causing the car to run at a low speed Rescue means and communication means for transmitting the operation information of the elevator taken in from the terminal device to the monitoring device of the service center via a telephone line, and rescue the passengers trapped in the emergency stopped car In the elevator confinement remote rescue device that is performed based on a command from the monitoring device side, the remote control device that causes the monitoring device to operate the passenger rescue device remotely via a telephone line, and communication from the terminal device State display means for displaying the state of the elevator based on the operation information of the elevator taken in via the line; And accident judging means confined determining the cause of the elevator trapped accident based on the elevator operation information retrieved via the communication line from the end device, When the cause of the confinement accident in the elevator determined by the means for determining the confinement accident is that the overcurrent and overvoltage of the control power supply of the operation control panel are detected by the power supply state detection device, the vertical position of the car is the car door. And a rescue operation availability determination means for determining whether or not the rescue operation is performed if the landing door is not in an engageable door zone. Is achieved.
[0009]
Preferably, based on the cause of the occurrence of the confinement accident of the elevator determined by the confinement accident cause determination means, the rescue operation availability determination means and the confinement for determining whether the passenger rescue operation is performed to rescue the passenger confined in the car The monitoring device has an accident cause display means for displaying the cause of the occurrence of an elevator confinement accident determined by the accident cause determination means, and a monitor who monitors the monitoring device is based on the accident cause displayed by the accident cause display means. By operating the remote control means, the passenger rescue means is operated remotely.
[0010]
Furthermore, when the cause of the elevator confinement accident determined by the confinement accident cause determination means is due to the operation of the safety device, the passenger rescue means has an abnormality detection invalidation means for invalidating the abnormality detection operation of the abnormality detection means. However, when the vertical position of the car is not in the door zone where the car door and the landing door can be engaged, the monitoring person who monitors the monitoring device operates the remote control means, and the abnormality detection of the passenger rescue means is remotely disabled. The elevator and the low-speed driving means may be operated so that the elevator can run at low speed.
[0011]
DETAILED DESCRIPTION OF THE INVENTION
Hereinafter, an embodiment of the present invention will be described with reference to the drawings. FIG. 1 is a block diagram showing a configuration of an embodiment of the present invention together with a schematic configuration of an elevator apparatus.
In the figure, 1 is a car suspended from a
[0012]
Further, 11 is a rescue control device attached to the elevator
[0013]
In the reference numerals indicating the internal configuration of the rescue control device 11,
[0014]
On the other hand, as an internal configuration of the monitoring device 4 in the service center, 18 is a monitoring unit constituting the main part of the
[0015]
FIG. 19 is a circuit diagram showing an internal circuit of the safety device circuit short-
[0016]
As is apparent from this circuit configuration, when any one of the normally closed
[0017]
Next, the operation of this embodiment will be described. 2-14 is a flowchart which shows the content of the confinement cause determination and passenger rescue processing performed by the
Details of the confinement cause determination / passenger rescue process will be described below with reference to these drawings. First, in step 10 of FIG. 2, the elevator travels normally under the control of the
[0018]
In
[0019]
FIG. 18 is an explanatory diagram showing a display screen of the
[0020]
The service center monitor recognizes the cause of the failure displayed on the failure
[0021]
In the following steps, details of the confinement cause determination / passenger rescue process will be described focusing on the content of the determination process of the confinement
[0022]
If it is determined in
[0023]
Therefore, if the current flowing through the operation control circuit and the applied voltage are above the specified values, the process proceeds to step 201 in FIG. 4, and the
[0024]
If the
[0025]
Next, in
[0026]
If it is determined in
[0027]
Next, proceeding to step 51, an operation command is transmitted to the low speed
[0028]
Subsequently, in step 52, an operation preparation command is transmitted to the electromagnetic
[0029]
If the
[0030]
Subsequently, in
[0031]
If overcurrent and overvoltage are not detected in
[0032]
If it is determined in
[0033]
In
[0034]
On the other hand, if the microcomputer is restored, the process proceeds to step 403 to determine whether or not the
[0035]
On the other hand, if the
[0036]
Next, if the elevator does not travel to the nearest floor in
[0037]
When the
[0038]
When the landing
[0039]
If the safety device circuit can be short-circuited in step 601, the process proceeds to step 602. If the short-circuit is not possible, the process proceeds to step 624 to determine whether the elevator is in the door zone. When in the door zone, the process proceeds to step 40 in FIG. 5, and the processing of
[0040]
In
[0041]
Next, in
[0042]
If the
[0043]
If the elevator is outside the door zone in step 605, the process proceeds to step 610, and it is determined whether or not the upper limit switch 22 in the upper part of the hoistway 10 is closed. When the ascent restriction switch 22 is not closed, in step 611, a low speed ascending operation command is transmitted from the
[0044]
If the elevator does not run in step 612 even if the car call button is pressed, an operation cancel command is issued to the low-speed
[0045]
Next, proceeding to step 621, an operation command is transmitted from the
[0046]
Next, when the elevator arrives at the nearest floor in step 613, the process proceeds to step 614, and the low-speed
[0047]
If the safety device is not operating in
[0048]
When the
[0049]
If the elevator does not travel in
[0050]
Subsequently, in
[0051]
If the elevator has arrived at the nearest floor, in
[0052]
On the other hand, if the elevator does not travel even if the passenger presses the car call button in the
[0053]
If either the car door close switch 27 or the closed end detection switch is not closed in
[0054]
On the other hand, if there is a reply from the passenger that the
[0055]
If any one of the car door close switch 27 and the closed end detection switch is closed, it is determined whether the car door close switch 27 is opened and the closed end detection switch is closed. (Step 727). If the determination result is negative, the process returns to step 702 to execute the above-described processing up to step 707 where the elevator travels at a low speed to the nearest floor to rescue the passenger. If the car door close switch 27 is closed and the closed end detection switch is open, the process proceeds to step 728 in FIG. 13, and the elevator is remotely switched to the low speed operation mode from the monitoring device 4, and then in
[0056]
In
[0057]
If the vehicle has traveled, it is determined in
[0058]
Next, in step 737, it is determined whether or not the
[0059]
If the elevator does not travel in
[0060]
When the elevator is in the door zone in
[0061]
In step 806, the
[0062]
Next, in step 812, the passenger is talked to the passenger using the
[0063]
In step 816, the detection signal from the car door closing switch 27 is checked to determine whether or not the
[0064]
In step 812, if the elevator does not run even if the passenger presses the car call button in the
[0065]
Next, in the above-described embodiment, when the elevator is moved remotely from the monitoring device 4 in the service center at a low speed, the safety of the passenger trapped in the
[0066]
Below, the operation | movement of the low speed driving | running | working of an elevator is demonstrated using the flowchart of FIG. In the present embodiment, as a rescue means for passengers, a method of rescue by short-circuiting the circuit of the car door closing switch 27 is adopted. Therefore, in
[0067]
Thus, if the elevator is set not to run at low speed unless the spatially separated buttons such as the door
[0068]
【The invention's effect】
As described above, according to the invention described in
[0069]
According to the invention of
According to the third aspect of the present invention, the monitoring device has the accident cause display means for displaying the cause of the occurrence of the confinement accident of the elevator determined by the confinement accident cause determination means, and the monitor who monitors the monitoring apparatus Based on the accident cause displayed on the display means, the remote control means is operated to operate the passenger rescue means from a remote location. Since the means can be operated, passengers trapped in the car can be rescued more quickly.
[0070]
According to the invention described in claim 4, when the cause of the confinement accident of the elevator determined by the confinement accident cause determination means is due to the operation of the safety device, the abnormality detection that invalidates the abnormality detection operation of the abnormality detection means Since the invalidation means is included in the passenger rescue means, the rescue operation can be performed by canceling the stop operation of the elevator that has been emergency stopped by the operation of the safety device.
According to the invention described in
[0071]
According to the sixth aspect of the present invention, when the elevator is not able to run when the car is not positioned in the door zone where the car door and the landing door can be engaged, the monitoring person who monitors the monitoring device can operate the remote control means. Because the brake release means of the passenger rescue means can be operated remotely by operating, the electromagnetic brake is remotely released and the elevator is moved to the nearest floor due to the weight difference between the car and the suspension weight. It is possible to rescue rescued passengers promptly.
According to the invention of
[0072]
According to the invention described in claim 8, the abnormality detecting means is an abnormality detecting switch that is opened when a serious abnormality of the elevator is detected, and the safety device comprises a series circuit of a plurality of the abnormality detecting switches and an elevator travel relay. Since the abnormality detection invalidating means closes the normally open contact connected in parallel to the series circuit, the safety device can be configured easily and inexpensively.
According to the ninth aspect of the present invention, the abnormality detection invalid means is a push operation of two operation buttons located at positions apart from each other among a plurality of operation buttons provided on the operation control panel provided in the car. If the passenger presses the two operation buttons and drives the elevator at a low speed while the car door is open, a personal accident due to the passenger's hand accidentally exiting the car door. Can be prevented.
[Brief description of the drawings]
FIG. 1 is a configuration diagram showing a configuration of an embodiment of the present invention together with a schematic configuration of an elevator apparatus.
FIG. 2 is a main flowchart of confinement cause determination / passenger rescue processing according to an embodiment of the present invention;
FIG. 3 is a flowchart of the subroutine of FIG.
FIG. 4 is a flowchart of the subroutine of FIG.
FIG. 5 is a flowchart of the subroutine of FIG.
FIG. 6 is a flowchart of the subroutine of FIG.
FIG. 7 is a flowchart of the subroutine of FIG.
FIG. 8 is a flowchart of the subroutine of FIG.
FIG. 9 is a flowchart of the subroutine of FIG.
FIG. 10 is a flowchart of the subroutine of FIG.
FIG. 11 is a flowchart of the subroutine of FIG.
FIG. 12 is a flowchart of the subroutine of FIG.
FIG. 13 is a flowchart of the subroutine of FIG.
FIG. 14 is a flowchart of the subroutine of FIG.
FIG. 15 is a front view of the operation panel in the car.
FIG. 16 is a front view of the operation panel in the car when operating to operate the elevator at a low speed.
FIG. 17 is a flowchart at the time of low speed operation instruction operation of the elevator.
FIG. 18 is an explanatory diagram showing a display screen of the monitoring unit
FIG. 19 is a circuit diagram showing an internal circuit of a safety device circuit short-circuit portion;
FIG. 20 is a configuration diagram showing an outline of a conventional elevator.
[Explanation of symbols]
1 basket
2,3 telephone equipment
4 monitoring devices
5 Operation control panel
6 rope
7 Suspension weight
8 platform
9 landing door
10 hoistway
11 Rescue control device
12 Terminal equipment
13 Confinement cause determination unit
14 Power interrupter
15 Safety device short circuit
16 Low speed operation command section
17 Electromagnetic brake opening
18 Monitoring unit
19 Remote control unit
20 Electromagnetic brake
21 Overspeed detection device
22 Ascent limit switch
23 Lower limit switch
25 landing door close switch
26 Car door
27 Car door close switch
28 Door open button
29 Door close button
30-35 Basket call button
37 Elevator status display
40 Registration status display
41 Switch operation display
42 Failure details display
43 Failure cause display
44 Display operation switch
45-49 normally closed contacts
50 Normally-open contact for rescue control
51 Relay for elevator travel
T Telephone line
DS monitor screen
Claims (7)
前記監視装置に、電話回線を介して遠隔から前記乗客救出手段を動作させる遠隔操作手段と、前記端末装置から通信回線を介して取り込んだエレベーターの運転情報に基づいてエレベーターの状態を表示する状態表示手段と、前記端末装置から通信回線を介して取り込んだエレベーターの運転情報に基づいてエレベーターの閉じ込め事故の発生原因を判定する閉じ込め事故原因判定手段と、この閉じ込め事故原因判定手段が判定したエレベーターの閉じ込め事故の発生原因が、運転制御盤の制御電源の過電流、過電圧を電源状態検出装置により検出したものであった時に、かごの上下位置がかご扉と乗場扉が係合可能な扉ゾーンに無ければ救出動作否と判定する救出動作可否判定手段とを設けて構成したことを特徴とするエレベーターの閉じ込め遠隔救出装置。A terminal device attached to the elevator for collecting the operation data of the elevator and monitoring its operation state, and an overspeed detection device for detecting that the speed of the car housed up and down in the hoistway is abnormally high When an abnormality detecting means such as an elevator detects a serious abnormality of the elevator, a safety device that emergency stops the passenger, a passenger rescue means including a low-speed driving means for running the car at a low speed, and an elevator taken in from the terminal device Communication means for transmitting the operation information of the vehicle to the monitoring device of the service center via a telephone line so that the passengers trapped in the emergency stopped car can be rescued based on a command from the monitoring device side In the elevator confinement remote rescue device,
Status display for displaying the status of the elevator on the monitoring device based on the remote operation means for operating the passenger rescue means remotely via a telephone line and the elevator operation information taken via the communication line from the terminal device means, and accident judging means confined determining the cause of the elevator trapped accident based on the elevator operation information retrieved via the communication line from the terminal device, confinement elevator this confinement accident judging means judges When the cause of the accident is that the overcurrent and overvoltage of the control power supply of the operation control panel are detected by the power supply state detection device, the vertical position of the car is not in the door zone where the car door and landing door can be engaged. close elevator, characterized in that which is configured by providing and determining rescue operation determination means and places the rescue operation not Because remote rescue equipment.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000029456A JP3681602B2 (en) | 2000-02-07 | 2000-02-07 | Elevator confinement remote rescue device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000029456A JP3681602B2 (en) | 2000-02-07 | 2000-02-07 | Elevator confinement remote rescue device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2001220075A JP2001220075A (en) | 2001-08-14 |
| JP3681602B2 true JP3681602B2 (en) | 2005-08-10 |
Family
ID=18554711
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000029456A Expired - Lifetime JP3681602B2 (en) | 2000-02-07 | 2000-02-07 | Elevator confinement remote rescue device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3681602B2 (en) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE60330817D1 (en) | 2002-02-27 | 2010-02-11 | Ricoh Kk | Optical read head and optical information processing device |
| WO2006106575A1 (en) * | 2005-03-31 | 2006-10-12 | Mitsubishi Denki Kabushiki Kaisha | Elevator apparatus |
| JP2015224116A (en) * | 2014-05-29 | 2015-12-14 | 株式会社日立ビルシステム | Elevator rescue operation device |
| EP3299326B1 (en) * | 2016-08-24 | 2024-09-25 | Otis Elevator Company | Communication with a trapped passenger in a transportation system |
| CN109466987A (en) * | 2018-12-28 | 2019-03-15 | 李洪英 | An elevator safety rescue system and a rescue method based thereon |
| CN110171755A (en) * | 2019-04-30 | 2019-08-27 | 广东寰宇电子科技股份有限公司 | A kind of method and system of lift car state-detection |
| CN110104518B (en) * | 2019-04-30 | 2020-12-11 | 河南中盛物联网有限公司 | Elevator fault judging method, monitoring system and computer storage medium |
| CN111792481B (en) * | 2020-08-20 | 2024-11-26 | 大连艾斯克自动化科技有限公司 | A remote rescue system for elevators |
| CN115535769B (en) * | 2020-12-18 | 2024-08-09 | 湖南大举信息科技有限公司 | Emergency rescue method for multi-car elevator system |
| CN115535770B (en) * | 2020-12-18 | 2024-09-24 | 湖南大举信息科技有限公司 | Emergency rescue device for multi-car elevator system |
| WO2022185512A1 (en) * | 2021-03-05 | 2022-09-09 | 三菱電機ビルテクノサービス株式会社 | Elevator device |
| CN116897135B (en) | 2021-03-05 | 2024-06-07 | 三菱电机楼宇解决方案株式会社 | Elevator device |
| CN117980248B (en) * | 2021-10-05 | 2024-12-27 | 三菱电机楼宇解决方案株式会社 | Elevator device |
| CN114261864A (en) * | 2021-12-31 | 2022-04-01 | 湖南大举信息科技有限公司 | Emergency rescue method for cable-free self-driven elevator |
-
2000
- 2000-02-07 JP JP2000029456A patent/JP3681602B2/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2001220075A (en) | 2001-08-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5660594B2 (en) | Elevator operation control device | |
| JP3681602B2 (en) | Elevator confinement remote rescue device | |
| KR101223303B1 (en) | Elevator apparatus | |
| JP7360569B2 (en) | Elevator control system and elevator control method | |
| JP2015224116A (en) | Elevator rescue operation device | |
| JP5015169B2 (en) | Elevator control device | |
| JP2009062127A (en) | Emergency elevator control system | |
| JP2012025558A (en) | Elevator control device | |
| KR100975758B1 (en) | Rescue circuit of elevator | |
| JP3412401B2 (en) | Elevator emergency operation device | |
| JP3375454B2 (en) | Elevator seismic control operation device | |
| JP2009155021A (en) | Emergency escape device for elevator | |
| JP4265938B2 (en) | Elevator emergency operation device | |
| JPH0755772B2 (en) | Elevator rescue operation device | |
| JP2011126609A (en) | Elevator and inspection method for elevator | |
| JP2004359405A (en) | Elevator remote rescue method in case of earthquake | |
| CN116897135B (en) | Elevator device | |
| JPH09249360A (en) | Limit switch operation inspection device of elevator | |
| JP2000169057A (en) | Hydraulic elevator control device | |
| JP4640912B2 (en) | Double deck elevator operation device | |
| JP2002284461A (en) | Elevator confinement remote rescue device | |
| JP6488229B2 (en) | Elevator device and confinement rescue operation method | |
| JPH1095580A (en) | Elevator emergency operation device | |
| JP2896040B2 (en) | Elevator rescue operation control device | |
| JP6696520B2 (en) | elevator |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20041105 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050105 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050228 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050510 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050518 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 3681602 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080527 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110527 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130527 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130527 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140527 Year of fee payment: 9 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| EXPY | Cancellation because of completion of term |