発明の属する技術分野
本出願は、一般にX線源取付けシステムに関し、より詳細には、口腔内トモシンセシスデータセットを取得するためにX線源を掃引する、調節可能で人間工学に基づいたモータ付き取付けシステムに関する。
関連技術の説明
X線撮影は、被写体(例えば、患者)の一方の側にX線源を位置決めし、被写体の他方の側に置かれたX線検出器(例えば、撮影用フィルム、輝尽性蛍光体プレートまたはデジタル検出器)に向かって、被写体を通して、X線源からX線を放射させることにより行われ得る。X線源および検出器は、X線撮影処置の間、実質的に静止したままである。X線が被写体を通り抜けると、それらのエネルギーは吸収され被写体の構成に応じて度合いが変化し、検出器に到達したX線は、被写体を介した累積した吸収度合いに基づいて、二次元(2D)X線画像(放射線写真としても知られる)を形成する。したがって、1枚の放射線写真では、被写体内の特徴についての十分な立体情報は提供されない。従来の放射線写真では特徴は重なり合って見えることが多いが、三次元(3D)空間では被写体内において別々に見える。
X線撮影はまた、歯科医療において実施することができ、この場合、撮像される被写体は、患者の1つまたは複数の歯科解剖学的構造であり得る。患者は、一般的には、仰向けに後ろに寄りかかる歯科用治療椅子に座り、例えば、20ミリメートル×26ミリメートルから27ミリメートル×37ミリメートルまでサイズを変えることができる口腔内X線センサを、歯科解剖学的構造の対象に近く患者の口腔内に配置する。患者およびX線センサを基準としてX線源の位置調整を容易にするために、X線源は、三次元空間で移動(すなわち、上、下、前、後、左および右への移動)するために、壁にまたは天井に取り付けられた調節可能なアームから吊るしてもよい。X線源ハウジングはまた、垂直軸(すなわち、ヨー軸)周りにX線源が回転することおよび水平軸(すなわち、ピッチ軸)周りにX線源が旋回することを可能にするように、設計され得る。しかし、歯科用放射線写真は、X線の累積した吸収度合いから(すなわち、撮像された歯科解剖学的構造を通じて)形成され、患者の歯科解剖学的構造についての十分な立体情報は提供されない。
X線コンピュータトモグラフィ(CT)は、被写体周りにX線源および検出器が360°回転することにより、3D画像で立体情報を提供することができる。しかし、X線CT装置は時には大きいものであり、かなりの金額の出資を必要とする専用機器である。
トモシンセシスは、限定された走査角度内での多数の透視からX線源を用いて被写体を撮像することによる、二次元のトモグラフィー画像スライスの形成において、被写体に関する三次元情報を提供する新たな画像診断法である。CT撮像と比較して、トモシンセシスは患者が曝されるX線量がより少なく、より速く画像が得られ、またより安価である。トモシンセシスシステムは、乳房X線撮影用に商業化されている。画像診断法のトモシンセシスはまた、口腔内撮像に適用し得る。
従来の歯科X線撮影用のX線源は、一般にヨー軸およびピッチ軸周りで調節され得るが、それらは一般にトモシンセシス撮像で複数の透視から被写体を撮像するように、限定された走査角度を介して走査する能力を有さない。
前述に関連する既存の制限ならびに他の制限は、X線源を位置調整するための調節可能な取付け部ならびにX線撮像システム、X線源取付けシステム、および調節可能な取付け部を備えるX線撮像のための方法により克服され得る。
本明細書に記載の一実施形態は、X線源を位置調整するための調節可能な取付け部に関する。調節可能な取付け部は、ヨー軸周りに旋回することができる垂直部材と、2つの端部を有し、垂直部材を通る円弧形のヨークとを備え、ピッチ軸はヨークの2つの端部を介して定義され、ロール軸はヨークの円心を介して、ヨークが横たわる面に直交するように定義され、調節可能な取付け部は、ヨークの2つの端部に取り付けられ、ヨークの2つの端部を介して定義された軸周りに縦揺れすることが可能なガントリと、ガントリに取り付けられるX線源とを備える。一態様において、X線源は、垂直部材の旋回によりヨー軸周りに回転され、ガントリが縦揺れすることによりピッチ軸周りに縦揺れされ、および/またはヨークが垂直部材を通ることによりロール軸周りに回転され得る。別の態様において、ガントリはモータ付き移動ステージを備え、X線源は移動ステージによりガントリに取り付けられる。さらに別の態様において、ガントリは、移動ステージによるX線源の移動に基づいてX線源を回転させるカムチャネルを備える。別の態様において、垂直部材はそこでヨークが回転するベアリングおよびヨークを固定するブレーキを備える。
本明細書に記載の別の実施形態は、X線撮像システムに関する。X線撮像システムは、ヨー軸周りに旋回することができる垂直部材と、2つの端部を有し、垂直部材を通る円弧形のヨークとを備え、ピッチ軸はヨークの2つの端部を介して定義され、ロール軸はヨークの円心を介して、ヨークが横たわる面に直交するように定義される調節可能な取付け部であって、ヨークの2つの端部に取り付けられ、ヨークの2つの端部を介して定義された軸周りに縦揺れすることが可能なガントリを備える調節可能な取付け部を備える。X線撮像システムは、調節可能な取付け部のガントリに取り付けられるX線源と、X線センサとをさらに備える。一態様において、X線源は、垂直部材の旋回によりヨー軸周りに回転し、ガントリが縦揺れすることによりピッチ軸周りに縦揺れし、および/またはヨークが垂直部材を通ることによりロール軸周りに回転することにより、X線源センサに照準を定めることができる。
本明細書に記載の別の実施形態は、X線センサと、調節可能な取付け部に取り付けられたX線源と、ヨー軸、ピッチ軸およびロール軸周りにX線源が回転することを可能にする調節可能な取付け部とを備えるX線撮像システムを用いたX線撮像のための方法に関する。方法は、調節可能な取付け部内で照準を定める位置にX線源を置くステップと、調節可能な取付け部のロール軸周りにX線源が回転することにより、置かれたX線源がX線センサに照準を定めるステップとを備える。一態様において、X線センサにX線源が照準を定めることは、調節可能な取付け部のヨー軸および調節可能な取付け部のピッチ軸のうちの少なくとも1つの周りにX線源が回転することをさらに含む。別の態様において、方法は、所定の走査角度を通じて照準を定めたX線源が走査を行うステップと、走査を行うステップの間にX線源にX線を放射させるステップと、X線センサで放射されたX線を検出するステップとをさらに備える。
本明細書に記載のさらに別の実施形態は、X線源取付けシステムに関する。X線源取付けシステムは、X線源と、X線源が取り付けられ、ヨー軸、ピッチ軸およびロール軸周りに回転自由度を有するX線源を提供するように構成された調節可能な取付け部とを備える。一態様において、X線源の重心は、X線源がヨー軸、ピッチ軸およびロール軸のうちの少なくとも1つの周りに回転するとき、変化しない。
本明細書に記載の種々の実施形態のさらなる特徴および利点ならびに構造および作動を、添付の図面を参照しながら以下に詳細に説明する。
トモシンセシスシステム
本明細書で特許請求されおよび/または説明される教示は、例示的な実施形態によってさらに説明される。これらの例示的な実施形態は、図面を参照しながら詳細に説明される。これらの実施形態は、図面のいくつかの見地全体を通じて、同様の構造に同じ参照符号を示す例示的な実施形態には限定されない。
図1は、本明細書に記載の例示的実施形態に従う、トモシンセシスシステムのシステムブロック図を示す。
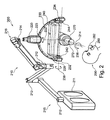
図2は、本明細書に記載の例示的実施形態に従う、X線源取付けシステムを示す図である。
図3Aは、本明細書に記載の例示的実施形態に従う、ハウジングカバーが取り外された状態の、図2に示すX線源取付けシステムのサブコンポーネントを正面、底面および左面から見た透視図を示す。
図3Bは、X線源が図3Aに示した位置と異なる位置にある場合の、図3Aに示すX線源取付けシステムのサブコンポーネントを正面、底面および左面から見た透視図を示す。
図3Cは、X線源が図3Aおよび図3Bに示した位置と異なる位置にある場合の、図3Aに示すX線源取付けシステムのサブコンポーネントを正面、底面および左面から見た透視図を示す。
図3Dは、本明細書に記載の例示的実施形態に従う、ハウジングカバーが取り外された状態の、図2に示すX線源取付けシステムのサブコンポーネントを正面、上面および右面から見た透視図を示す。
図4は、本明細書に記載の例示的実施形態に従う、ハウジングカバーが取り外された状態の、図2に示すX線源取付けシステムのサブコンポーネントの正面図を示す。
図5は、本明細書に記載の例示的実施形態に従う、ハウジングカバーが取り外された状態の、図2に示すX線源取付けシステムのサブコンポーネントの右側面図を示す。
図6は、本明細書に記載の例示的実施形態に従う、ハウジングカバーが取り外された状態の、図2に示すX線源取付けシステムのサブコンポーネントの背面図を示す。
図7は、本明細書に記載の例示的実施形態に従う、ハウジングカバーが取り外された状態の、図2に示すX線源取付けシステムのサブコンポーネントを背面、底面および左面から見た透視図を示す。
図8は、本明細書に記載の例示的実施形態に従う、図3Aに示す構成要素を有する移動ガントリサブアセンブリおよびX線源の上面図を示す。
図9Aは、本明細書に記載の例示的実施形態に従う、図3Aに示す構成要素を有し、照準を定める位置で構成された、移動ガントリサブアセンブリおよびX線源の上面図を示す。
図9Bは、本明細書に記載の例示的実施形態に従う、別の位置にある図9Aに示す移動ガントリサブアセンブリおよびX線源を示す。
図9Cは、本明細書に記載の例示的実施形態に従う、別の位置にある図9Aに示す移動ガントリサブアセンブリおよびX線源を示す。
図10Aは、ロール軸周りに回転したときの、1つの位置にある図2に示すX線源取付けシステムの正面図を示す。
図10Bは、ロール軸周りに回転したときの、別の位置にある図2に示すX線源取付けシステムの正面図を示す。
図11は、図1に示すトモシンセシスシステムの例示のコンピュータシステムのブロック図を示す。
図12は、図2のX線源取付けシステムを用いてX線源を位置調整するための、本明細書に記載の例示的実施形態に従う手順を示すフローチャートを示す。
以下、それぞれのこのような構成要素の詳細な説明は、各図に対して提供され得ないが、各図の種々の要素は、同じ構成要素を識別するために同一である少なくともいくつかの参照符号を有し得る。
好適な実施態様の詳細な説明
本明細書に記載の例示の態様に従って、図1は、口腔内トモシンセシスデータセットを取得するための口腔内トモシンセシスシステム100のブロック図を示す。
システム100は、対象の被写体50の1つまたは複数のX線画像を取得するように動作され得て、この被写体50は、1つまたは複数のサブ被写体(複数可)52をさらに含んでもよい。例えば、被写体50は患者の歯科解剖学的構造であってよい。より詳細には、被写体50は、患者の歯(または複数の歯)および取囲む歯列であってよく、サブ被写体(複数可)52は、例えば、歯内の根本の構造であってよい。
システム100は、X線センサ102およびX線源サブシステム116を備え、これらはそのサブコンポーネントをそれぞれ備え、コンピュータシステム106に電気的に接続される。一実施例では、X線源サブシステム116は、天井または壁に取り付けられた調節可能なアーム(本明細書において以下でさらに説明される図2を参照のこと)から吊り下げられるので、被写体50を基準として自由に位置調整される。X線源サブシステム116は、モータ付きのステージ118に取り付けられたX線源104をさらに備え、またステージ上のコントローラ120を示す。ステージ上のコントローラ120は、他のものとともに、モータ付きのステージ118の動きを制御することができる。
コンピュータシステム106は、ディスプレイユニット108および入力ユニット114に電気的に接続される。ディスプレイユニット108は、出力ユーザインタフェースおよび/または入力ユーザインタフェースであることができる。
X線センサ102は、被写体50の一方の側に位置され、X線センサ102の受光面は、デカルト座標系におけるX−Y平面に伸びる。X線センサ102は、例えば、相補型金属酸化膜半導体(CMOS)ピクセルアレイデジタル検出器、電荷結合素子(CCD)ピクセルアレイデジタル検出器などであることができる。本明細書に記載の例示的実施形態において、X線センサ102のサイズは、被写体50である患者のタイプに従って変化し、より詳細には、X線センサ102は、歯科産業で用いられる標準サイズの長方形の口腔内センサの1つであってよい。標準の歯科用サイズの例としては、サイズが約27×37ミリメートルであり、一般的に成人患者に用いられる「サイズ2型」センサ、サイズが約21×31ミリメートルであり、典型的にサイズ2型の成人患者よりも小さい患者に用いられる「サイズ1型」センサ、およびサイズが約20×26ミリメートルであり、典型的に小児患者に用いられる「サイズ0型」センサが挙げられる。本明細書に記載のさらなる例示的実施形態において、X線センサ102の各ピクセルは、15マイクロメートルのピクセル幅を有し、対応して、サイズ2型のセンサは、1700×2400ピクセルアレイにおいて約400万ピクセルを有し、サイズ1型のセンサは、1300×2000ピクセルアレイにおいて約270万ピクセルを有し、およびサイズ0型のセンサは、1200×1600ピクセルアレイにおいて約190万ピクセルを有する。X線センサ102の色の解像度は、本明細書に記載の一例示的実施形態において、この例に限定されないが、12ビットのグレースケールの解像度であってよく、他の例示の色の解像度は、8ビットのグレースケールの解像度、14ビットのグレースケールの解像度および16ビットのグレースケールの解像度を含んでよい。
X線源104は、X線センサ102から被写体50の反対側に位置される。X線源104は、被写体50を通り抜け、X線センサ102によって検出されるX線110を放射する。X線源104は、デカルト座標系の少なくともZ軸方向において、X線センサ102の受光面の方へX線110を放射するように方向づけられ、Z軸はX線センサ102の受光面と関連してX−Y平面に直交する。
X線源104は、走査角度112内でそれぞれ多様な種々の位置に位置調整される間、X線110を放射することもでき、走査角度112における0度位置は、Z軸に沿ってX線110を放射するための位置に対応する。本明細書に記載の一例示的実施形態において、ユーザははじめに、X線源サブシステム116を位置調整し、したがって、X線源104も被写体50を基準として所定の開始位置に位置調整される。ついで、コンピュータシステム106は、周知の開始位置に基づいて、モータ付きステージ118を介してX線源104が移動し、走査角度112内でそれぞれの種々の位置を通じて掃引するように、ステージ上のコントローラ120を制御する。走査角度112を通じたX線源104の掃引は、連続する動きとして、または不連続なステップとして行われ得る。コンピュータシステム106は、それぞれの位置で、線源104にX線110を放射させるようにX線源104を制御する。
図1において、0°位置はX線源104で示され、一方、参照符号104aおよび104bは同じX線源を示すが、それらは走査角度112内で2つの別の例示の位置にある。走査角度112は、例えば、0°から±20°であることができるが、この例は限定していない。例えば、他の実施形態において、線源104は、いくつかの所望の方向でX線110を放射するように位置調整が可能で、上記の例で記載されたような、面、方向または角度だけである必要はない。
放射されたX線110が被写体50を通り抜けると、X線110の光量子は、カルシウム豊富な歯および骨などの被写体50の高密度構造によって、より高く減衰され、ゴムおよびチークなどの柔組織によって低く減衰される。1つまたは複数の減衰構造は、サブ被写体52により示され得る。被写体50を通り抜け、減衰されたX線110は、X線センサ102に投射され、X線センサ102は、X線110を電気信号に変換し、コンピュータシステム106に電気信号を提供する。一例示的実施形態において、X線センサ102は、X線110をまず光学像に変換し、ついで光学像を電気信号に変換する間接型センサ(例えば、シンチレータX線検出器)であってよく、別の例示の実施形態において、X線センサ102は、X線110を直接的に電気信号に変換する直接型センサ(例えば、半導体X線検出器)であってよい。コンピュータシステム106は、周知のやり方で、被写体50の二次元投射像を形成するように電気信号を処理する。本明細書に記載の一例示的実施形態において、二次元投射像の画像寸法は、X線センサ102のピクセルの寸法および数に対応する。
X線源104がX線センサ102を基準として照準を定めることによって、X線源104が走査角度112の各位置を通じて掃引するときに、X線センサ102のすべての受光面がX線源104により放射されたX線110を露光されるようにすることは、重要とみなされ得る。X線源104が、適切に照準を定められなかった場合、X線センサ102の一部は、走査角度112におけるX線源104の1つまたは複数の位置でのX線110を、露光しないままであってよく、対応して取得される投射像は、未露光領域内で明るい(すなわち、白)および欠けたサブ被写体52として現れる。このエラーは、コーンカットとして知られている。X線源104が0°位置にあるときに、放射されるX線110がX線センサ102の中心に向けられ、またX線センサ102に実質的に直交するように、X線源104が、さらに以下に記載される(すなわち、少なくとも図2に基づいて記載されるように)例示的実施形態に従う、X線取付けシステムに照準を定められてもよい。本明細書に記載の少なくともいくつかの例示的実施形態において、口腔外照準リング124は、X線源104の照準を容易にするための目標を提供するために、X線センサ102に取り付けられる。さらに、X線源104の照準は、走査角度112の掃引の間に放射されるX線110を、焦点122に実質的に集中するようにしてよく、焦点122は、例えば、センサ102の近くに位置してもよい。
コンピュータシステム100は、上述のやり方において、まず少なくとも0°位置を含む種々の角度でX線源104を位置調整し、被写体50を通ってX線センサ102に、それぞれ種々の角度でX線110を放射することにより、複数の投射像を収集することができる。例えば、複数の投射像は、X線源が0°位置にある場合に得られる1つの直交投射像と、X線源104がZ軸(走査角度112に対応する)から±20°の範囲内で種々の角度に位置調整される場合にそれぞれ得られる50の投射像との、合計で51の投射を含んでよい。他の例示的実施形態において、投射像の数は、25から70の範囲であってよい。X線源が0°位置にあるとき、直交投射像が得られるので、直交投射像は従来のX線画像と同様の外観を有する。すなわち、2次元の直交投射像は、奥行き感覚を有さず、被写体50内の1つまたは複数のサブ被写体52は、直交投射像内の別の頂点の1つに重ねて現れてもよい。他方では、被写体50内でZ軸方向の種々の奥行きに位置するサブ被写体52は、走査角度112に沿って種々の角度から撮像される場合、視差度合いの変化をうける。
コンピュータシステム106は、いくつかの既存のまたは最近の発達した再構成技術に従って、一連の2次元のトモシンセシス画像スライスを再構成するために、複数の投射像を処理する。本明細書に記載の一例示的実施形態において、トモシンセシス画像スライスの再構成は、本明細書にすべて陳述されるように、その全体が参照により本明細書に組み込まれる、D.G.Grantにより公表された、表題「“Tomosynthesis: A Three-Dimensional Radiographic Imaging Technique”, IEEE Transactions on Biomedical Engineering, Volume 19, 1972, pp. 20-28,」、およびまた、J.T.Dobbinsらにより再公表された、表題「“Digital X-ray Tomosynthesis: Current State of the Art and Clinical Potential”, Physics in Medicine and Biology, Volume 48, 2003, pp. R65-R106 (the J. T. Dobbins et al. publication),」において記載されるような、シフト加算技術を利用する。
X線源取付けシステム
トモシンセシスデータセットを得るためのシステム100を概ね説明したので、次に、調節可能なアーム210、調節可能なアーム210から吊るされる垂直部材220、垂直部材220を介して角をなして変位され得るヨーク230、ヨーク230に取り付けられる移動ガントリ240、および移動ガントリ240に取り付けられるX線源270を備える調節可能な取付けシステム200の実施形態を、図2、図3A〜図3Dおよび図4〜図7と併せて説明する。詳細には、図2は、取付けシステム200の例示的実施形態を示し、図3A〜図3Dおよび図4〜図7は、根底となるサブコンポーネントを示すために、ハウジングカバーが取り外された状態の、取付けシステム200の例示の実施形態の種々の図である。図3A〜図3Dおよび図4〜図7は、明確さのために、取付けシステム200の種々の斜視図を提供する。さらに、図3Bおよび図3Cは、X線源270が、本明細書において以下にさらに説明されるような図3Aに示す位置とは異なる位置に移動した状態の、図3Aに示すサブコンポーネントを図示する。
図2に示す例示的な取付けシステム200およびX線源270は、図1に示すX線源サブシステム116として共同で働き、より詳細には、図2のX線源270は、図1に示すX線源104として働く。図1に示す少なくともいくつかの他の構成要素とともに、取付けシステム200およびX線源270はまた、トモシンセシス撮像を行うのに有用であり、すなわち、走査角度に沿って種々の角度で、複数の投射像を取得するのに有用であり得る。次に、前述の構成要素およびそれらの相互接続を、詳細に説明する。
図2に示す調節可能なアーム210の一端部215は、壁または天井などの静止構造物に取り付けられ得る。一例示的実施形態において、調節可能なアーム210は、取付けパネル211により壁に取り付け可能で、本明細書に記載のさらに例示の実施形態において、調節可能なアーム210は、X線源270の露光設定を調節するための制御(図示せず)も含むことができる。
図2に示すように、垂直部材220(拡大解釈すれば、それに取り付けられるヨーク230、移動ガントリ240、およびX線源270)は、調節可能なアーム210の別の端部216から吊るされる(すなわち、調節可能なアーム210のその端部は静止構造物に取り付けられない)。調節可能なアーム210は区分化され得て、1つまたは複数のジョイント212(例えば、蝶番、スイベル、ユニバーサルジョイントなど)を備えることができ、それにより、三次元空間で、すなわち上、下、左、右、前および後方向で、X線源270の自由な移動を可能にする。
本明細書に記載の例示的実施形態において、垂直部材220は、ジョイント214により調節可能なアーム210の一端部216から垂直に吊るされ、それにより、調節可能なアーム210の位置および方向にかかわらず、垂直に方向づけられるヨー軸222を垂直部材220が定義することができる。さらに、垂直部材220はスイベル221(図3A〜図3Dおよび図4〜図7に図示される)などの回転機構を備え、それにより、調節可能なアーム210の位置および方向と無関係に、垂直部材220(拡大解釈すれば、それに取り付けられるヨーク230、移動ガントリ240、およびX線源270)をヨー軸222周りに自由に回転させることができる。例えば、垂直部材220は、ヨー軸周りに少なくとも360°以内の任意の角度で回転することができる。
次に、本明細書に記載の例示的実施形態に従う、垂直部材220のサブコンポーネントを、それぞれのハウジングカバーが取り外された垂直部材220および移動ガントリ240を示す図3A〜図3Dおよび図4〜図7に基づいて説明する。図3A〜図3Dおよび図4〜図7に図示されるように、垂直部材220は、垂直部材220を介してチャネルとして働くベアリングアセンブリ223を備える。ヨーク230は、ベアリングアセンブリ223のチャネルに移動可能に抑制され、ベアリングアセンブリ223を通って、従って垂直部材220を通って角をなして変位され得る。本明細書に記載の一例示的実施形態において、ベアリングアセンブリ223は、ヨーク230が垂直部材230を通って角をなして変位するように、そこでヨーク230が回転する少なくとも1つのローラベアリング224を備える。本明細書に記載の他の例示的実施形態において、ベアリングアセンブリは、ボールベアリング、低摩擦性固形ベアリングなどの他のタイプのベアリング、または、ベアリングアセンブリ223を介したヨーク230の低抵抗移動を容易にする他の適切な任意の構成要素を含むことができる。
垂直部材220はまた、少なくとも1つのブレーキ226を備える。一例示的実施形態において、ブレーキ226は、ヨーク230に型締力を加える2つの電気機械的なブレーキを備えることができる。既定状態において、ブレーキ226は、定位置にヨーク230を保持し、ベアリングアセンブリ223を介したヨーク230の任意の動きを実質的に防ぎ、垂直部材220を基準としてヨーク230の位置を固着することができる。ブレーキ解除ボタン228(図2に示す)は、取付けシステム200で提供され、ブレーキ226と連通する。ブレーキ解除ボタン228が押されると、ブレーキ226はヨーク230を解放するように制御し、ついで、ヨーク230は、上述のやり方でベアリングアセンブリ223を自由に通ることができる。
ヨーク230は、円弧形に形成され、2つの端部232および234を備える。より詳細には、本明細書に記載の一例示的実施形態において、ヨーク230は半円形である。ロール軸236は、軸がヨーク230の円心を通り、ヨーク230が横たわる面に直交するように、ヨーク230に関連して定義される。ロール軸236はまた、ヨー軸222に直交する。したがって、垂直部材220を通って、半円形のヨーク230が角をなして変位する行為は、言い換えれば、ロール軸236周りにヨーク230が回転するのと同様に説明することもできる。本明細書に記載の例示的実施形態において、ヨーク230は、単一の自由度に垂直部材220により制限され、すなわち、ロール軸236周りにヨーク230が回転することが制限され、ヨーク230は、180°までロール軸236周りに回転され得る。
本明細書に記載の他の例示的実施形態において、ヨーク230は他の湾曲弧状である。
ブレーキ解除ボタン228(図2)は、例えば、ヨーク230の一端部232または234などの好都合な位置にあることができ、それにより、操作者が、ヨーク230を解放するためにブレーキ226を制御し、ボタン228が置かれる端部232または234によりヨーク230を保持し、および垂直部材220を通ってヨーク230を回転させるために、ブレーキ解除ボタン228を片手で押すことができる。
移動ガントリ240は、図3A〜図3Dおよび図4〜図7に示すように、ヨーク端部232と234との間に取り付けられる。移動ガントリ240は、旋回軸を形成するアタッチメントの各点である、ヨーク端部232および234にそれぞれ移動可能に取り付けられるアーム242および244を備えることができ、それにより、移動ガントリ240は、ヨーク端部232および234を介して実質的に定義され、ロール軸236に実質的に直交するピッチ軸238周りに縦揺れされ得る。一例示的実施形態において、移動ガントリ240は、約±45°の範囲で、ピッチ軸238周りに縦揺れされ得る。本明細書に記載のさらに例示的実施形態において、ピッチ軸238は、ヨーク230の円心と交差し、したがって、ロール軸236とも交差する。さらに一例示的実施形態において、ヨー軸222、ロール軸236およびピッチ軸238は、ヨーク230の円心で互いに交差し、または実質的に互いに近接して交差する。
本明細書に記載の一例示的実施形態において、各ヨーク端部232および234と対応するアーム242および244との間の、移動ガントリ240の均衡(本明細書で以下にさらに記載されるような)および/または静止摩擦力により、ヨーク端部232および234ならびに移動ガントリアーム242および244は、停止の間、互いに関して静止している。したがって、移動ガントリ240は、アタッチメントの点で静止摩擦力に打ち勝つ回転力が加えられることにより縦揺れする。本明細書に記載の一例示的実施形態において、ヨーク端部232および234は、移動ガントリ240のアーム242および244の相補的な軸状部品を受容する円筒状のクランプ環である。あるいは、アーム242および244は、ヨーク端部232および234の相補的な軸状部品を受容する円筒状のクランプ環を含んでよい。
次に、本明細書に記載の例示的実施形態に従う、移動ガントリ240のサブコンポーネントを、図2のそれぞれのハウジングカバーが取り外された垂直部材220および移動ガントリ240ならびに明確さのために種々の斜視図を提供する少なくともいくつかの図を示す、図3A〜図3Dおよび図4〜図7に基づいて説明する。移動ガントリ240は、モータ246、移動ステージ248、モータ246および移動ステージ248の両方に取り付けられたリンク機構250、ならびに移動ステージ248が載せられる1つまたは複数の線形ガイド252を収容する。本明細書に記載の一例示的実施形態において、リンク機構250は、モータ246の回転動作を移動ステージ248の直線動作に変換し、本明細書に記載のさらに例示的実施形態において、リンク機構250は、親ねじであることができる。リンク機構250および線形ガイド252は、ピッチ軸238に実質的に平行な方向に位置調整され、したがって移動ステージ248も、ピッチ軸238に実質的に平行な方向に、移動軸254(例えば、図8および図9A〜図9Cを参照)に沿って移動される。
シャフト256は、移動ステージ248を介して回転可能に配置され、シャフト256の回転軸268は、移動軸254に直交する。詳細には、本明細書に記載の一例示的実施形態において、シャフト256は、実質的に円筒状であり、回転軸268は、円筒状シャフト256の円筒状の軸に一致する。X線源270は、シャフト256により、移動ガントリ240に取り付けられる。
次に、図8および図9A〜図9Cについて説明する。図8および図9A〜図9Cは、本明細書に記載の例示的実施形態に従う、移動ガントリ240およびX線源270の上面図(すなわち、図3Dおよび図4〜図6上で、移動ガントリ240に向かって「A」点から見た)である。図9Aは、シャフト256、アーム258およびガイドピン260を含む根底となる特徴を示すために、移動ステージ248が取り外された点を除けば、図8に示すものと同様の移動ガントリ240を図示する。図9Bおよび図9Cは、図9Aと同じ構成要素(すなわち、移動ガントリ240およびX線源270)をそれぞれ図示するが、次に、移動ガントリ240に含まれるカムシステムにより、移動軸254に沿って種々に回転した異なる位置にあるX線源270を、図8および図9A〜図9C(カムシステムの部品は、図3A〜図3Dおよび図4〜図7の他の部品で確認できるが)に基づいて詳細に説明する。
図8および図9A〜図9Cで図示された例示的実施形態において、移動ガントリ240は、移動ガントリ240のカムプレート263に配置されたカムチャネル262、およびシャフト256にその第1の端部で固定され、ガイドピン260によってカムチャネル262内にその第2の端部で抑制されたアーム258を備えるカムシステムを含む。
図8および図9A〜図9Cに示すように、カムチャネル262は、移動軸254を基準とした角度で動く。移動ステージ248(図8に示す)は、モータ246により移動軸254に沿って、リンク機構250およびガイド(複数可)252上で移動するとき、アーム258のガイドピン260が、カムチャネル262に沿って続いて移動する。例えば、図9Bでは、シャフト256およびX線源270は、移動ガントリアーム242に近いリンク機構250の端部に、モータ246によって(移動ステージ248に取り付けられることにより(図9Bに示されない))移動され、ガイドピン260がアーム258を介してシャフト256に連結されることにより、ガイドピン260は対応して、移動ガントリアーム242に近いカムチャネル262の端部に沿って、続いて移動する。同様に、図9Cでは、シャフト256およびX線源270は、移動ガントリアーム244に近いリンク機構250の端部に、モータ246によって(移動ステージ248に取り付けられることにより(図9Cに示されない))移動され、ガイドピン260がアーム258を介してシャフト256に連結されることにより、ガイドピン260は対応して移動ガントリアーム244に近いカムチャネル262の端部に沿って、続いて移動する。図9Aは、図9Bおよび図9Cにそれぞれ示される位置の途中位置に移動した(モータ246を介した移動ステージ248(図9Aに示されない)の移動による)、シャフト256およびX線源270を示し、図9Aはまた、カムチャネル262内で途中位置にあるガイドピン260を示す。
図9A〜図9Cから理解され得るように、上述のやり方で、移動ステージ248の移動に続いて移動するように、ガイドピン260が角のあるカムチャネル262に抑制されるので、リンク機構250の一端部(例えば、図9Bに示されるような)からリンク機構250の他端部(例えば、図9Cに示されるような)への、モータ246による移動ステージ248(図8に示す)およびシャフト256の移動は、同時にシャフト256に回転を与える。(図3A〜図3Cの斜視図に図示されたそれぞれのX線源の移動および回転に対応する、図9A〜図9Cに図示されたそれぞれのX線源の移動および回転)
一例示的実施形態において、移動ステージ248(拡大解釈すれば、シャフト256およびX線源270)は、合計距離10インチ(254ミリメートル)まで移動され得る。その合計10インチ(254ミリメートル)の移動距離をシャフト256の合計40°の回転に変換するために、カムチャネル262は、移動軸254を基準とした約4.8〜8.5°の角度を有するゆるやかなスプラインに沿い、アーム258は、約2インチ(51ミリメートル)の長さである。上述の移動は、リンク機構250上の端部から端部までの移動の任意の量であることができ、シャフト256の回転度合いは、その移動の量と釣り合っていることが理解されるであろう。
本明細書に記載の一例示的実施形態において、カムプレート263は、移動ガントリ240の構造の固定された不可欠な部分をなす。本明細書に記載の別の例示的実施形態において、カムプレート263は、交換可能であり、移動ガントリに取外し可能に取り付けられ得る。それぞれ複数の交換可能なカムプレートは、種々のカムチャネル設計(例えば、シャフト256の種々の回転を達成するような種々の角度)を有するように用いられ得る。
上述のように、X線源270は、シャフト256に取り付けられ、シャフト256の移動および回転も、X線源270に与えられる。X線源270は、図9A〜図9Cに示すように、放射軸274に沿ってX線を放射する(本明細書に記載の少なくともいくつかの例示的実施形態において、X線源270はまた、放射されるX線を照準する照準器272を備えることができる)。X線源270の照準を定める位置276は、X線源270が移動ガントリ240の2つのアーム242および244の中心にある場合に、定義され(図3Aおよび図9Aに示すように)、放射軸274が移動軸254およびピッチ軸238に直交するように方向づけられ(図3Aおよび図9Aに示すように)、放射軸274はまた、ロール軸236に平行である(図3Aに示すように)。例えば、照準を定める位置276は、図1に関して上述した走査角度112の0°位置であることができる。
上述したシャフト256の同時の移動および回転は、X線源270を、シャフト256へのそのアタッチメントにより、図9A〜図9Cに示すように、照準を定める位置276から±θ°の走査角度で掃引させる。上記の例示的実施形態において、シャフト256の40°の回転は、したがって、X線源270を、照準を定める位置276から±20°の走査角度で掃引させる。
X線源270の回転は、シャフト256を回転させる専用のモータ(すなわち、移動モータ246とは無関係のモータ、図示せず)により達成され得るが、X線源270が、移動モータ246により移動軸254に沿って移動するとき、カムチャネル262およびガイドピン260がシャフト256を回転させるので、そのようなモータは不必要である。したがって、X線源270を回転させるための専用のモータを備える、移動ガントリと比較して、より低重量、より低コストおよびより簡単な設計で、走査角度を通じたX線源の掃引が実現され得る。
X線源270が照準を定める位置276にある場合、以下にさらに本明細書で記載されるやり方で、操作者は、患者290の口腔に入れられた口腔内X線センサ280に向けて、正確におよび容易に、X線源270の照準を定めおよびX線源270を位置調整することができる。(図2の口腔内X線センサ280は、図1のX線センサ102として働くことができる。) X線源270の照準を定めることにおいて操作者を助けるために、様々な参照マーカ(図示せず)が、ヨー軸222、ピッチ軸238、ロール軸236、移動軸254および放射軸274のうちの1つまたは複数に対して、X線源270の照準を示すために、X線源270および/または移動ガントリ240上に配置され得る。そのような標識の例は、線、フィン、リブ、目盛り尺、レーザ投射器などを含み、そのような標識は、移動ガントリ240のハウジング上またはX線源270上に配置され得るが、これらの例に限定されない。
上述の取付けシステム200により、X線源270の位置は、6の自由度内で調節され得る。次に、X線源270の調整性について説明する。
調節可能なアーム210は、3つの移動自由度、すなわち、上下方向、左右方向、および前後方向(他の表現ではまた、垂直方向、水平方向、x方向、y方向、またはz方向を含むが、これらに制限されない方向を、説明のために用いてよい)、をX線源270に与える。
取付けシステム200はまた、3つの回転自由度をX線源270に与える。垂直部材220のスイベル221は、ヨー軸222(図2)周りにX線源270が回転することを可能にする。垂直部材220を介したヨーク230の変位は、実質的にロール軸236周りに、X線源270が回転することを可能にする(図10Aおよび図10Bに示すように)。X線源270は、ヨーク端部232および234を有する旋回軸を形成する移動ガントリアーム242および244により、実質的にピッチ軸238(図2)周りに縦揺れする。
照準を定める位置276において、移動ガントリ240およびX線源270の重心は、重量釣合い位置に置かれ、すなわち、重心は、実質的にヨー軸222、ロール軸236、およびピッチ軸238のうちの2つ以上の交差点と一致する。したがって、ヨーク230は、実質的にジャイロスコープのリングのように働き、垂直部材220を介したヨーク230の回転または移動ガントリ240の縦揺れは、実質的に重心の位置を変えない。さらに、移動ガントリ240およびX線源270は、ロール軸236とピッチ軸238の交差点の近くに、質量を集中させることにより、コンパクトに設計され得るので、ロール軸236およびピッチ軸238それぞれの周りでの慣性モーメントを減らすことができる。
均衡がとれ、緊密に集中した重心によって、移動ガントリ240の縦揺れは、ブレーキの助力なしに、ヨーク端部232と234との間および対応するアーム242と244との間の静止摩擦力により保たれ得る。また、取付けシステム200の重心が均衡されおよび集中されるので、ユーザは、わずかな力で容易に、ヨー軸222、ピッチ軸238、およびロール軸236周りに、それぞれX線源270を偏揺れ、縦揺れ、および回転させることができ、それにより、X線源270の照準を正確に定め、X線源270を正確に位置調整することができる。したがって、X線源270は、患者の口腔内に置かれた口腔内X線センサ280を用いて、照準を定められおよび位置調整され得るので、走査角度を通じて取得された画像の少なくとも実質的に大半において、コーンカットを回避し、実質的に最小限にすることができる。
本明細書に記載の一例示的実施形態において、X線源270および移動ガントリ240(より詳細には、モータ246)は、図1で図示されたコンピュータシステム106と通信し、コンピュータシステム106により制御され得る。例えば、X線源270は、X線を放射するように制御され得、移動ガントリ240は、上述のやり方で、X線源270を移動するように制御され得る。本明細書に記載のいくつかの他の例示的実施形態において、移動ガントリ240は、少なくとも部分的にモータ246および/またはX線源270を制御するように機能する1つまたは複数のステージ上のコントローラ(複数可)264(例えば、図3A〜図3Dに示されるような)を、備えることができる。本明細書に記載のいくつかの例示的実施形態において、コントローラ264は、図1で示されたモータコントローラ120として働くことができる。これらの例は、単に例示的性質のものであり、他の実施形態において、異なる度合いの制御が、コンピュータシステム106とステージ上のコントローラ264との間で供給され得る。
コンピュータシステム
図11は、コンピュータシステム300のブロック図を示す。本明細書に記載の一例示的実施形態において、コンピュータシステム300の少なくともいくつかの構成要素(それらすべての構成要素またはディスプレイユニット328以外のすべて、など)は、図1に示すコンピュータシステム106を形成し、コンピュータシステム106に含まれ得る。コンピュータシステム300は、少なくとも1つのコンピュータプロセッサ322(「コントローラ」とも呼ばれる)を含む。コンピュータプロセッサ322は、例えば、中央処理装置、多重処理装置、特定用途向け集積回路(「ASIC」)、フィールドプログラマブルゲートアレイ (「FPGA」)などを含んでよい。プロセッサ322は、通信インフラ324(例えば、通信バス、クロスオーバーバー装置、またはネットワーク)に接続される。
コンピュータシステム300はまた、ディスプレイユニット328(一例示的実施形態において、ディスプレイユニット108を形成しまたはディスプレイユニット108に含まれ得る)での表示のために、通信インフラ324からのビデオグラフィックス、テキスト、および他のデータを転送する、ディスプレイインタフェース(または他の出力インタフェース)326を含む。
コンピュータシステム300はまた、コンピュータプロセッサ322に情報を送るために、コンピュータシステム300のユーザによって用いられ得る、入力ユニット330を含む。本明細書に記載の一例示的実施形態において、入力ユニット330は、入力ユニット114を形成し、または入力ユニット114に含まれ得る。例えば、入力ユニット330は、キーボードデバイスおよび/あるいはマウスデバイス、または他の入力デバイスを含むことができる。一例示において、ディスプレイユニット328、入力ユニット330、およびコンピュータプロセッサ322は、集合的にユーザインタフェースを形成することができる。
例えば、タッチスクリーンを含む一例示的実施形態において、入力ユニット330およびディスプレイユニット328は、同じユーザインタフェースに結合され、または同じユーザインタフェースを表し得る。そのような実施形態において、ディスプレイユニット328を触るユーザは、ディスプレイユニット328から、例えば、プロセッサ322などのプロセッサに信号を転送することができるディスプレイインタフェース326に、対応する信号を送ることができる。
さらに、コンピュータシステム300は、好ましくは、ランダムアクセスメモリ(「RAM」)であるメインメモリ332を含み、また二次メモリ334を含んでよい。二次メモリ334は、例えば、ハードディスクドライブ336および/またはリムーバブルストレージドライブ338(例えば、フロッピーディスクドライブ、磁気テープドライブ、光ディスクドライブ、フラッシュメモリドライブなど)を含むことができる。リムーバブルストレージドライブ338は、周知のやり方で、リムーバブルストレージユニット340から読み出し、および/またはリムーバブルストレージユニット340に書き込む。リムーバブルストレージユニット340は、例えば、リムーバブルストレージドライブ338によって書き込まれ、および/またはリムーバブルストレージドライブ338から読み出される、フロッピーディスク、磁気テープ、光ディスク、フラッシュメモリデバイスなどであってよい。リムーバブルストレージユニット340は、コンピュータ実行可能ソフトウェア命令および/またはデータを記憶する、非一時的コンピュータ可読記憶媒体を含むことができる。
代替の実施形態において、二次メモリ334は、コンピュータシステム300にロードされるコンピュータ実行可能プログラムまたは他の命令を記憶する、他のコンピュータ可読媒体を含むことができる。そのようなデバイスは、リムーバブルストレージユニット344およびインタフェース342(例えば、ビデオゲームシステムで用いられるものと同様のプログラムカートリッジおよびカートリッジインタフェース)、リムーバブルメモリチップ(例えば、消去可能プログラマブル読取り専用メモリ(「EPROM」)またはプログラマブル読取り専用メモリ(「PROM」))、および関連メモリソケット、ならびにリムーバブルストレージユニット344からコンピュータシステム300の他の部分に、ソフトウェアおよびデータを転送することが可能な他のリムーバブルストレージユニット344およびインタフェース342を含むことができる。
コンピュータシステム300はまた、コンピュータシステム300と外部デバイスとの間で、ソフトウェアおよびデータを転送することが可能な通信インタフェース346を含むことができる。通信インタフェース346の例としては、モデム、ネットワークインタフェース(例えば、イーサネット(登録商標)カードまたはIEEE 802.11 ワイヤレスLANインタフェース)、通信ポート(例えば、ユニバーサルシリアルバス(「USB」)ポートまたはFireWire(登録商標)ポート)、パーソナルコンピュータメモリカード国際協会(「PCMCIA」)インタフェースなどが挙げられる。通信インタフェース346を介して転送されるソフトウェアおよびデータは、信号形式であり、これは、通信インタフェース346によって送信および/または受信することが可能な、電気信号、電磁信号、光信号、または他のタイプの信号であり得る。信号は、通信パス348(例えば、チャネル)を介して通信インタフェース346に提供される。通信パス348は、信号を運び、ワイヤまたはケーブル、ファイバーオプティクス、電話回線、セルリンク、無線周波数(「RF」)リンクなどを用いて実施することができる。通信インタフェース346はまた、コンピュータシステム300とリモートサーバまたはクラウドベースのストレージ(図示せず)との間で、ソフトウェアまたはデータまたは他の情報を転送するのに用いられてもよい。
1つまたは複数のコンピュータプログラム(コンピュータ制御ロジックとも呼ばれる)は、メインメモリ332および/または二次メモリ334に記憶される。コンピュータプログラムはまた、通信インタフェース346を介して受信することができる。コンピュータプログラムは、コンピュータプロセッサ322によって実行された場合に、本明細書に記載される手順を、コンピュータシステム300が行うことが可能なコンピュータ実行可能な命令を含む。したがって、コンピュータプログラムは、トモシンセシスシステム100のコンピュータシステム106および他の構成要素(例えば、X線センサ102およびX線源104)を制御することができる。
本明細書に記載の一例示的実施形態において、ソフトウェアは、非一時的コンピュータ可読記憶媒体に記憶することができ、リムーバブルストレージドライブ338、ハードドライブ336、および/または通信インタフェース346を用いて、コンピュータシステム300のメインメモリ332および/または二次メモリ334にロードすることができる。プロセッサ322によって実行された場合、制御ロジック(ソフトウェア)により、コンピュータシステム300に、より一般的には口腔内トモシンセシスシステム100に、本明細書に記載の手順を行わせる。
別の例示的実施形態において、ASIC、FPGAなどのハードウェアコンポーネントは、本明細書に記載の機能を行うために用いられ得る。本明細書に記載の機能を行うように、かかるハードウェア構成を実施することは、本明細書に鑑みて当業者には明らかであろう。
調節可能なX線源取付けシステムを用いた撮像方法
調節可能な取付けシステム200に取り付けられたX線源270および口腔内X線センサ280(図2)を含む、口腔内トモシンセシスシステム100(図1)を用いたトモシンセシス撮像方法を、次に、方法の一例示的実施形態を示すフローチャートである図12に基づいて説明する。
X線源270を位置調整する前に、患者290は、患者を楽にするために調節され得る歯科用治療椅子(図示せず)に座り、口腔内X線センサ280が、患者の口腔に配置される。本明細書に記載のいくつかの例示的実施形態において、口腔内X線センサ280は、長方形のサイズ0、サイズ1またはサイズ2のセンサであり得、上述のように、これはまた、X線源270の照準を定めおよびX線源270を位置調整するための目標を提供する口腔外ガイド282に、取り付けられ得る。
処理は、ステップS701で開始され、ステップS702で、操作者は、移動軸254に沿って照準を定める位置276にX線源270が移動するように移動ガントリ240を制御するために、入力ユニット114を介してコンピュータシステム106に命令する。
ステップS704で、操作者は、手動で、口腔内X線センサ280(または、必要な場合、口腔外ガイド282を用いて)を用いて、X線源270の照準を定め、X線源270を位置調整するために、上述の1つまたは複数の自由度内(すなわち、上/下移動、左/右移動、前/後移動、ヨー回転、ピッチ回転、およびロール回転)で、取付けシステム200によりX線源270を動かしおよび/または回転させる。
本明細書に記載の一例示的実施形態において、口腔内X線センサ280を基準として、X線源270の照準を定めおよび位置調整するための方法およびデバイスが、米国特許第13/591,979号に記載されるような、本明細書にすべて陳述されるようにその全体が参照により本明細書に組み込まれる、歯科用位置調整システムにより達成され得る。
分岐ブロックS706で、操作者は、口腔内X線センサ280を基準としたX線源270の照準および配置を確認する。X線源270は、放射軸274が実質的にセンサの中心の近くで口腔内X線センサ280に直交して突出し、走査角度112内の各位置でX線源270により放射されたX線が、コーンカットなしで口腔内X線センサ280で受信される場合、適切に照準が定められ、位置調整されたものとみなされる。詳細には、口腔内センサ280が長方形であれば、移動軸254を口腔内X線センサ280の長方形の軸(例えば詳細には、長い方の長方形の軸)の1つに平行になるようにすることができ、ヨーク230を回転させるのに有用であり得る。
X線源270が、分岐ブロックS706で適切に照準が定められず、位置調整されなかったものとみなされた場合、ついで、操作者はX線源270を再位置付けするために、再びステップS702および/またはS704を実行し、続いて、X線源270の照準および配置を確認するために、再びステップS706を実行する。
X線源270が、分岐ブロックS706で適切に照準が定められ、位置調整されたものとみなされた場合、ついで、処理はステップS708に進む。
ステップS708で、上述のやり方で、口腔内トモシンセシスシステム100(図1)は、走査角度112を介して被写体50の直交投射像(すなわち、走査角度112内の0°で、また照準を定める位置276で、X線源270を用いて取得された画像)を含む複数の投射像(例えば、少なくとも患者の歯科解剖学的構造の一部)を、取得するために制御される。
例えば、また上述のように、移動モータ246は、移動軸に沿ってX線源270を移動させるために、またX線源270をカムシステムにより走査角度112を通じて回転させるために、コンピュータシステム106および/またはコントローラ264により制御される。移動と同時に、X線源270は、被写体50を通って放射軸274に沿ってX線を放射するように、コンピュータシステム106および/またはコントローラ264により制御され、口腔内X線センサ280は、その受光面で受光したX線を電気信号に変換し、ついで、その電気信号はコンピュータシステム106に送信される。コンピュータシステム106は、電気信号を処理して、複数の2D投射像を取得し、ついで、さらに複数の投射像を処理して、一連のトモグラフィー画像スライスを再構成する。
処理は、ステップS710で終了する。
前述の記載に鑑みて、本明細書に記載の1つまたは複数の例示的実施形態は、多様な自由度を用いて、操作者が正確にかつ造作なくX線源の照準を定めることが可能な、コンパクトなおよび軽量のトモシンセシスに利用可能なX線源取付けシステムに関することが分かり得る。X線源取付けシステムは、非常に操作しやすく、コンパクトかつ軽量であるので、歯科臨床医は、いすの側で撮像を行うために、ひと続きの空間を犠牲にすることなく(設置スペースを大きくとるCT装置とは対照的に)、先進的なトモシンセシスベースの三次元撮像システムを備え付けることができる。さらに、X線源取付けシステムは、トモシンセシス撮像(制限された走査角度を介してX線源を掃引することによる)および一般的なデジタルX線撮影(X線源の掃引なしで撮像することによる)の両方の実施に用いられ得、したがって、これは臨床医が用いる既存の歯科X線撮影用のX線源に取って代わることができる。
上述の種々の実施形態は、単なる例として示され、限定するものではない。本発明の精神および範囲から逸脱せずに、形態および細部に対して種々の変形を施すことが可能であることが、当業者には明らかである。したがって、本発明は、上述の例示的な実施形態のいずれにも限定されるべきではなく、以下の特許請求の範囲およびそれらと同等のもののみに従って定義されるべきである。
さらに、本明細書に記載の機能を強調する添付図面は、例示として示されていることを理解すべきである。本発明のアーキテクチャは、十分に柔軟性をもって設定可能であるため、図面に示す以外の方法で利用およびナビゲートすることができる。
さらに、本明細書に記載の例示的実施形態は、口腔内トモシンセシス撮像に限定されない。本明細書に記載の例示的実施形態は、他の解剖学的領域の走査を行うために使用することができる。
さらに、要約書の目的は、米国特許商標庁、および、特許あるいは法律の用語および/または言い回しに精通していない一般人、特に、科学者、技師、および当該技術分野(複数可)の医師が、本明細書に開示の技術的主題の性質および本質について一瞥して迅速に判断できるためのものである。要約書は、決して本発明の範囲を限定しようとするものではない。特許請求の範囲で引用される手順は、示した順序で行う必要がないことをまた理解されるものとする。
発明の属する技術分野
本出願は、一般にX線源取付けシステムに関し、より詳細には、口腔内トモシンセシスデータセットを取得するためにX線源を掃引する、調節可能で人間工学に基づいたモータ付き取付けシステムに関する。
関連技術の説明
国際公開第00/57788号パンフレットは支持構造に固定される、異なる方向への動きを許容する連結式アームに連結された接続片を備えたX線源のための位置調整装置を使用したX線のための方法および装置を開示している。該連結式アームの端部に、例えば、第一の回転A軸周りで、アーム上に配置されたモーターによってなど、回転可能な支持アーチが取り付けられる。支持アーチの外部自由端に、例えば、保護筐体によって覆われたモータなどにより、第二の回転軸B周りで回転可能なフォークブラケットが取り付けられている。フォークブラケットの中では、継手ピンによって筺体が連結されており、筺体はX線源を格納し、放射されるX線の光線は、光線のフィールドを限定する管状部品を通って移動する。筺体は、例えば、筺体の中に配置されたモータになどによって、第三の回転軸C周りで回転できる。第一の回転軸Aおよび第二の回転軸Bは、好ましくは、原則的に互いに対向した角度に位置づけられ、水平面に原則的に位置づけられるが、C軸は垂直面に位置づけられる。
米国特許出願第5113424号明細書は、固定の空間位置を有する土台に連結された第一の可動リンクを含むロボット操縦器のアームアッセンブリを備える、歯科X線を撮影するための装置を開示する。リンクは一つの自由度で動くモーターアッセンブリによって制御される。第二の可動リンクは該リンクの自由端に連結され、第二のモーターアッセンブリによって制御され、一つの自由度で動く。
特開昭52−002391号公報は、カメラのX線発生装置とフィルムドラムが平行に患者の患部周りで回転できるデバイスを提供することにより、連続撮影および1回のみの撮影両方に用いることができるX線撮影デバイスを開示する。
X線撮影は、被写体(例えば、患者)の一方の側にX線源を位置決めし、被写体の他方の側に置かれたX線検出器(例えば、撮影用フィルム、輝尽性蛍光体プレートまたはデジタル検出器)に向かって、被写体を通して、X線源からX線を放射させることにより行われ得る。X線源および検出器は、X線撮影処置の間、実質的に静止したままである。X線が被写体を通り抜けると、それらのエネルギーは吸収され被写体の構成に応じて度合いが変化し、検出器に到達したX線は、被写体を介した累積した吸収度合いに基づいて、二次元(2D)X線画像(放射線写真としても知られる)を形成する。したがって、1枚の放射線写真では、被写体内の特徴についての十分な立体情報は提供されない。従来の放射線写真では特徴は重なり合って見えることが多いが、三次元(3D)空間では被写体内において別々に見える。
X線撮影はまた、歯科医療において実施することができ、この場合、撮像される被写体は、患者の1つまたは複数の歯科解剖学的構造であり得る。患者は、一般的には、仰向けに後ろに寄りかかる歯科用治療椅子に座り、例えば、20ミリメートル×26ミリメートルから27ミリメートル×37ミリメートルまでサイズを変えることができる口腔内X線センサを、歯科解剖学的構造の対象に近く患者の口腔内に配置する。患者およびX線センサを基準としてX線源の位置調整を容易にするために、X線源は、三次元空間で移動(すなわち、上、下、前、後、左および右への移動)するために、壁にまたは天井に取り付けられた調節可能なアームから吊るしてもよい。X線源ハウジングはまた、垂直軸(すなわち、ヨー軸)周りにX線源が回転することおよび水平軸(すなわち、ピッチ軸)周りにX線源が旋回することを可能にするように、設計され得る。しかし、歯科用放射線写真は、X線の累積した吸収度合いから(すなわち、撮像された歯科解剖学的構造を通じて)形成され、患者の歯科解剖学的構造についての十分な立体情報は提供されない。
X線コンピュータトモグラフィ(CT)は、被写体周りにX線源および検出器が360°回転することにより、3D画像で立体情報を提供することができる。しかし、X線CT装置は時には大きいものであり、かなりの金額の出資を必要とする専用機器である。
トモシンセシスは、限定された走査角度内での多数の透視からX線源を用いて被写体を撮像することによる、二次元のトモグラフィー画像スライスの形成において、被写体に関する三次元情報を提供する新たな画像診断法である。CT撮像と比較して、トモシンセシスは患者が曝されるX線量がより少なく、より速く画像が得られ、またより安価である。トモシンセシスシステムは、乳房X線撮影用に商業化されている。画像診断法のトモシンセシスはまた、口腔内撮像に適用し得る。
従来の歯科X線撮影用のX線源は、一般にヨー軸およびピッチ軸周りで調節され得るが、それらは一般にトモシンセシス撮像で複数の透視から被写体を撮像するように、限定された走査角度を介して走査する能力を有さない。
前述に関連する既存の制限ならびに他の制限は、X線源を位置調整するための調節可能な取付け部ならびにX線撮像システム、X線源取付けシステム、および調節可能な取付け部を備えるX線撮像のための方法により克服され得る。
本明細書に記載の一実施形態は、X線源を位置調整するための調節可能な取付け部に関する。調節可能な取付け部は、ヨー軸周りに旋回することができる垂直部材と、2つの端部を有し、垂直部材を通る円弧形のヨークとを備え、ピッチ軸はヨークの2つの端部を介して定義され、ロール軸はヨークの円心を介して、ヨークが横たわる面に直交するように定義され、調節可能な取付け部は、ヨークの2つの端部に取り付けられ、ヨークの2つの端部を介して定義された軸周りに縦揺れすることが可能なガントリと、ガントリに取り付けられるX線源とを備える。一態様において、X線源は、垂直部材の旋回によりヨー軸周りに回転され、ガントリが縦揺れすることによりピッチ軸周りに縦揺れされ、および/またはヨークが垂直部材を通ることによりロール軸周りに回転され得る。別の態様において、ガントリはモータ付き移動ステージを備え、X線源は移動ステージによりガントリに取り付けられる。さらに別の態様において、ガントリは、移動ステージによるX線源の移動に基づいてX線源を回転させるカムチャネルを備える。別の態様において、垂直部材はそこでヨークが回転するベアリングおよびヨークを固定するブレーキを備える。
本明細書に記載の別の実施形態は、X線撮像システムに関する。X線撮像システムは、ヨー軸周りに旋回することができる垂直部材と、2つの端部を有し、垂直部材を通る円弧形のヨークとを備え、ピッチ軸はヨークの2つの端部を介して定義され、ロール軸はヨークの円心を介して、ヨークが横たわる面に直交するように定義される調節可能な取付け部であって、ヨークの2つの端部に取り付けられ、ヨークの2つの端部を介して定義された軸周りに縦揺れすることが可能なガントリを備える調節可能な取付け部を備える。X線撮像システムは、調節可能な取付け部のガントリに取り付けられるX線源と、X線センサとをさらに備える。一態様において、X線源は、垂直部材の旋回によりヨー軸周りに回転し、ガントリが縦揺れすることによりピッチ軸周りに縦揺れし、および/またはヨークが垂直部材を通ることによりロール軸周りに回転することにより、X線源センサに照準を定めることができる。
本明細書に記載の別の実施形態は、X線センサと、調節可能な取付け部に取り付けられたX線源と、ヨー軸、ピッチ軸およびロール軸周りにX線源が回転することを可能にする調節可能な取付け部とを備えるX線撮像システムを用いたX線撮像のための方法に関する。方法は、調節可能な取付け部内で照準を定める位置にX線源を置くステップと、調節可能な取付け部のロール軸周りにX線源が回転することにより、置かれたX線源がX線センサに照準を定めるステップとを備える。一態様において、X線センサにX線源が照準を定めることは、調節可能な取付け部のヨー軸および調節可能な取付け部のピッチ軸のうちの少なくとも1つの周りにX線源が回転することをさらに含む。別の態様において、方法は、所定の走査角度を通じて照準を定めたX線源が走査を行うステップと、走査を行うステップの間にX線源にX線を放射させるステップと、X線センサで放射されたX線を検出するステップとをさらに備える。
本明細書に記載のさらに別の実施形態は、X線源取付けシステムに関する。X線源取付けシステムは、X線源と、X線源が取り付けられ、ヨー軸、ピッチ軸およびロール軸周りに回転自由度を有するX線源を提供するように構成された調節可能な取付け部とを備える。一態様において、X線源の重心は、X線源がヨー軸、ピッチ軸およびロール軸のうちの少なくとも1つの周りに回転するとき、変化しない。
本明細書に記載の種々の実施形態のさらなる特徴および利点ならびに構造および作動を、添付の図面を参照しながら以下に詳細に説明する。
トモシンセシスシステム
本明細書で特許請求されおよび/または説明される教示は、例示的な実施形態によってさらに説明される。これらの例示的な実施形態は、図面を参照しながら詳細に説明される。これらの実施形態は、図面のいくつかの見地全体を通じて、同様の構造に同じ参照符号を示す例示的な実施形態には限定されない。
図1は、本明細書に記載の例示的実施形態に従う、トモシンセシスシステムのシステムブロック図を示す。
図2は、本明細書に記載の例示的実施形態に従う、X線源取付けシステムを示す図である。
図3Aは、本明細書に記載の例示的実施形態に従う、ハウジングカバーが取り外された状態の、図2に示すX線源取付けシステムのサブコンポーネントを正面、底面および左面から見た透視図を示す。
図3Bは、X線源が図3Aに示した位置と異なる位置にある場合の、図3Aに示すX線源取付けシステムのサブコンポーネントを正面、底面および左面から見た透視図を示す。
図3Cは、X線源が図3Aおよび図3Bに示した位置と異なる位置にある場合の、図3Aに示すX線源取付けシステムのサブコンポーネントを正面、底面および左面から見た透視図を示す。
図3Dは、本明細書に記載の例示的実施形態に従う、ハウジングカバーが取り外された状態の、図2に示すX線源取付けシステムのサブコンポーネントを正面、上面および右面から見た透視図を示す。
図4は、本明細書に記載の例示的実施形態に従う、ハウジングカバーが取り外された状態の、図2に示すX線源取付けシステムのサブコンポーネントの正面図を示す。
図5は、本明細書に記載の例示的実施形態に従う、ハウジングカバーが取り外された状態の、図2に示すX線源取付けシステムのサブコンポーネントの右側面図を示す。
図6は、本明細書に記載の例示的実施形態に従う、ハウジングカバーが取り外された状態の、図2に示すX線源取付けシステムのサブコンポーネントの背面図を示す。
図7は、本明細書に記載の例示的実施形態に従う、ハウジングカバーが取り外された状態の、図2に示すX線源取付けシステムのサブコンポーネントを背面、底面および左面から見た透視図を示す。
図8は、本明細書に記載の例示的実施形態に従う、図3Aに示す構成要素を有する移動ガントリサブアセンブリおよびX線源の上面図を示す。
図9Aは、本明細書に記載の例示的実施形態に従う、図3Aに示す構成要素を有し、照準を定める位置で構成された、移動ガントリサブアセンブリおよびX線源の上面図を示す。
図9Bは、本明細書に記載の例示的実施形態に従う、別の位置にある図9Aに示す移動ガントリサブアセンブリおよびX線源を示す。
図9Cは、本明細書に記載の例示的実施形態に従う、別の位置にある図9Aに示す移動ガントリサブアセンブリおよびX線源を示す。
図10Aは、ロール軸周りに回転したときの、1つの位置にある図2に示すX線源取付けシステムの正面図を示す。
図10Bは、ロール軸周りに回転したときの、別の位置にある図2に示すX線源取付けシステムの正面図を示す。
図11は、図1に示すトモシンセシスシステムの例示のコンピュータシステムのブロック図を示す。
図12は、図2のX線源取付けシステムを用いてX線源を位置調整するための、本明細書に記載の例示的実施形態に従う手順を示すフローチャートを示す。
以下、それぞれのこのような構成要素の詳細な説明は、各図に対して提供され得ないが、各図の種々の要素は、同じ構成要素を識別するために同一である少なくともいくつかの参照符号を有し得る。
好適な実施態様の詳細な説明
本明細書に記載の例示の態様に従って、図1は、口腔内トモシンセシスデータセットを取得するための口腔内トモシンセシスシステム100のブロック図を示す。
システム100は、対象の被写体50の1つまたは複数のX線画像を取得するように動作され得て、この被写体50は、1つまたは複数のサブ被写体(複数可)52をさらに含んでもよい。例えば、被写体50は患者の歯科解剖学的構造であってよい。より詳細には、被写体50は、患者の歯(または複数の歯)および取囲む歯列であってよく、サブ被写体(複数可)52は、例えば、歯内の根本の構造であってよい。
システム100は、X線センサ102およびX線源サブシステム116を備え、これらはそのサブコンポーネントをそれぞれ備え、コンピュータシステム106に電気的に接続される。一実施例では、X線源サブシステム116は、天井または壁に取り付けられた調節可能なアーム(本明細書において以下でさらに説明される図2を参照のこと)から吊り下げられるので、被写体50を基準として自由に位置調整される。X線源サブシステム116は、モータ付きのステージ118に取り付けられたX線源104をさらに備え、またステージ上のコントローラ120を示す。ステージ上のコントローラ120は、他のものとともに、モータ付きのステージ118の動きを制御することができる。
コンピュータシステム106は、ディスプレイユニット108および入力ユニット114に電気的に接続される。ディスプレイユニット108は、出力ユーザインタフェースおよび/または入力ユーザインタフェースであることができる。
X線センサ102は、被写体50の一方の側に位置され、X線センサ102の受光面は、デカルト座標系におけるX−Y平面に伸びる。X線センサ102は、例えば、相補型金属酸化膜半導体(CMOS)ピクセルアレイデジタル検出器、電荷結合素子(CCD)ピクセルアレイデジタル検出器などであることができる。本明細書に記載の例示的実施形態において、X線センサ102のサイズは、被写体50である患者のタイプに従って変化し、より詳細には、X線センサ102は、歯科産業で用いられる標準サイズの長方形の口腔内センサの1つであってよい。標準の歯科用サイズの例としては、サイズが約27×37ミリメートルであり、一般的に成人患者に用いられる「サイズ2型」センサ、サイズが約21×31ミリメートルであり、典型的にサイズ2型の成人患者よりも小さい患者に用いられる「サイズ1型」センサ、およびサイズが約20×26ミリメートルであり、典型的に小児患者に用いられる「サイズ0型」センサが挙げられる。本明細書に記載のさらなる例示的実施形態において、X線センサ102の各ピクセルは、15マイクロメートルのピクセル幅を有し、対応して、サイズ2型のセンサは、1700×2400ピクセルアレイにおいて約400万ピクセルを有し、サイズ1型のセンサは、1300×2000ピクセルアレイにおいて約270万ピクセルを有し、およびサイズ0型のセンサは、1200×1600ピクセルアレイにおいて約190万ピクセルを有する。X線センサ102の色の解像度は、本明細書に記載の一例示的実施形態において、この例に限定されないが、12ビットのグレースケールの解像度であってよく、他の例示の色の解像度は、8ビットのグレースケールの解像度、14ビットのグレースケールの解像度および16ビットのグレースケールの解像度を含んでよい。
X線源104は、X線センサ102から被写体50の反対側に位置される。X線源104は、被写体50を通り抜け、X線センサ102によって検出されるX線110を放射する。X線源104は、デカルト座標系の少なくともZ軸方向において、X線センサ102の受光面の方へX線110を放射するように方向づけられ、Z軸はX線センサ102の受光面と関連してX−Y平面に直交する。
X線源104は、走査角度112内でそれぞれ多様な種々の位置に位置調整される間、X線110を放射することもでき、走査角度112における0度位置は、Z軸に沿ってX線110を放射するための位置に対応する。本明細書に記載の一例示的実施形態において、ユーザははじめに、X線源サブシステム116を位置調整し、したがって、X線源104も被写体50を基準として所定の開始位置に位置調整される。ついで、コンピュータシステム106は、周知の開始位置に基づいて、モータ付きステージ118を介してX線源104が移動し、走査角度112内でそれぞれの種々の位置を通じて掃引するように、ステージ上のコントローラ120を制御する。走査角度112を通じたX線源104の掃引は、連続する動きとして、または不連続なステップとして行われ得る。コンピュータシステム106は、それぞれの位置で、線源104にX線110を放射させるようにX線源104を制御する。
図1において、0°位置はX線源104で示され、一方、参照符号104aおよび104bは同じX線源を示すが、それらは走査角度112内で2つの別の例示の位置にある。走査角度112は、例えば、0°から±20°であることができるが、この例は限定していない。例えば、他の実施形態において、線源104は、いくつかの所望の方向でX線110を放射するように位置調整が可能で、上記の例で記載されたような、面、方向または角度だけである必要はない。
放射されたX線110が被写体50を通り抜けると、X線110の光量子は、カルシウム豊富な歯および骨などの被写体50の高密度構造によって、より高く減衰され、ゴムおよびチークなどの柔組織によって低く減衰される。1つまたは複数の減衰構造は、サブ被写体52により示され得る。被写体50を通り抜け、減衰されたX線110は、X線センサ102に投射され、X線センサ102は、X線110を電気信号に変換し、コンピュータシステム106に電気信号を提供する。一例示的実施形態において、X線センサ102は、X線110をまず光学像に変換し、ついで光学像を電気信号に変換する間接型センサ(例えば、シンチレータX線検出器)であってよく、別の例示の実施形態において、X線センサ102は、X線110を直接的に電気信号に変換する直接型センサ(例えば、半導体X線検出器)であってよい。コンピュータシステム106は、周知のやり方で、被写体50の二次元投射像を形成するように電気信号を処理する。本明細書に記載の一例示的実施形態において、二次元投射像の画像寸法は、X線センサ102のピクセルの寸法および数に対応する。
X線源104がX線センサ102を基準として照準を定めることによって、X線源104が走査角度112の各位置を通じて掃引するときに、X線センサ102のすべての受光面がX線源104により放射されたX線110を露光されるようにすることは、重要とみなされ得る。X線源104が、適切に照準を定められなかった場合、X線センサ102の一部は、走査角度112におけるX線源104の1つまたは複数の位置でのX線110を、露光しないままであってよく、対応して取得される投射像は、未露光領域内で明るい(すなわち、白)および欠けたサブ被写体52として現れる。このエラーは、コーンカットとして知られている。X線源104が0°位置にあるときに、放射されるX線110がX線センサ102の中心に向けられ、またX線センサ102に実質的に直交するように、X線源104が、さらに以下に記載される(すなわち、少なくとも図2に基づいて記載されるように)例示的実施形態に従う、X線取付けシステムに照準を定められてもよい。本明細書に記載の少なくともいくつかの例示的実施形態において、口腔外照準リング124は、X線源104の照準を容易にするための目標を提供するために、X線センサ102に取り付けられる。さらに、X線源104の照準は、走査角度112の掃引の間に放射されるX線110を、焦点122に実質的に集中するようにしてよく、焦点122は、例えば、センサ102の近くに位置してもよい。
コンピュータシステム100は、上述のやり方において、まず少なくとも0°位置を含む種々の角度でX線源104を位置調整し、被写体50を通ってX線センサ102に、それぞれ種々の角度でX線110を放射することにより、複数の投射像を収集することができる。例えば、複数の投射像は、X線源が0°位置にある場合に得られる1つの直交投射像と、X線源104がZ軸(走査角度112に対応する)から±20°の範囲内で種々の角度に位置調整される場合にそれぞれ得られる50の投射像との、合計で51の投射を含んでよい。他の例示的実施形態において、投射像の数は、25から70の範囲であってよい。X線源が0°位置にあるとき、直交投射像が得られるので、直交投射像は従来のX線画像と同様の外観を有する。すなわち、2次元の直交投射像は、奥行き感覚を有さず、被写体50内の1つまたは複数のサブ被写体52は、直交投射像内の別の頂点の1つに重ねて現れてもよい。他方では、被写体50内でZ軸方向の種々の奥行きに位置するサブ被写体52は、走査角度112に沿って種々の角度から撮像される場合、視差度合いの変化をうける。
コンピュータシステム106は、いくつかの既存のまたは最近の発達した再構成技術に従って、一連の2次元のトモシンセシス画像スライスを再構成するために、複数の投射像を処理する。本明細書に記載の一例示的実施形態において、トモシンセシス画像スライスの再構成は、本明細書にすべて陳述されるように、その全体が参照により本明細書に組み込まれる、D.G.Grantにより公表された、表題「“Tomosynthesis: A Three-Dimensional Radiographic Imaging Technique”, IEEE Transactions on Biomedical Engineering, Volume 19, 1972, pp. 20-28,」、およびまた、J.T.Dobbinsらにより再公表された、表題「“Digital X-ray Tomosynthesis: Current State of the Art and Clinical Potential”, Physics in Medicine and Biology, Volume 48, 2003, pp. R65-R106 (the J. T. Dobbins et al. publication),」において記載されるような、シフト加算技術を利用する。
X線源取付けシステム
トモシンセシスデータセットを得るためのシステム100を概ね説明したので、次に、調節可能なアーム210、調節可能なアーム210から吊るされる垂直部材220、垂直部材220を介して角をなして変位され得るヨーク230、ヨーク230に取り付けられる移動ガントリ240、および移動ガントリ240に取り付けられるX線源270を備える調節可能な取付けシステム200の実施形態を、図2、図3A〜図3Dおよび図4〜図7と併せて説明する。詳細には、図2は、取付けシステム200の例示的実施形態を示し、図3A〜図3Dおよび図4〜図7は、根底となるサブコンポーネントを示すために、ハウジングカバーが取り外された状態の、取付けシステム200の例示の実施形態の種々の図である。図3A〜図3Dおよび図4〜図7は、明確さのために、取付けシステム200の種々の斜視図を提供する。さらに、図3Bおよび図3Cは、X線源270が、本明細書において以下にさらに説明されるような図3Aに示す位置とは異なる位置に移動した状態の、図3Aに示すサブコンポーネントを図示する。
図2に示す例示的な取付けシステム200およびX線源270は、図1に示すX線源サブシステム116として共同で働き、より詳細には、図2のX線源270は、図1に示すX線源104として働く。図1に示す少なくともいくつかの他の構成要素とともに、取付けシステム200およびX線源270はまた、トモシンセシス撮像を行うのに有用であり、すなわち、走査角度に沿って種々の角度で、複数の投射像を取得するのに有用であり得る。次に、前述の構成要素およびそれらの相互接続を、詳細に説明する。
図2に示す調節可能なアーム210の一端部215は、壁または天井などの静止構造物に取り付けられ得る。一例示的実施形態において、調節可能なアーム210は、取付けパネル211により壁に取り付け可能で、本明細書に記載のさらに例示の実施形態において、調節可能なアーム210は、X線源270の露光設定を調節するための制御(図示せず)も含むことができる。
図2に示すように、垂直部材220(拡大解釈すれば、それに取り付けられるヨーク230、移動ガントリ240、およびX線源270)は、調節可能なアーム210の別の端部216から吊るされる(すなわち、調節可能なアーム210のその端部は静止構造物に取り付けられない)。調節可能なアーム210は区分化され得て、1つまたは複数のジョイント212(例えば、蝶番、スイベル、ユニバーサルジョイントなど)を備えることができ、それにより、三次元空間で、すなわち上、下、左、右、前および後方向で、X線源270の自由な移動を可能にする。
本明細書に記載の例示的実施形態において、垂直部材220は、ジョイント214により調節可能なアーム210の一端部216から垂直に吊るされ、それにより、調節可能なアーム210の位置および方向にかかわらず、垂直に方向づけられるヨー軸222を垂直部材220が定義することができる。さらに、垂直部材220はスイベル221(図3A〜図3Dおよび図4〜図7に図示される)などの回転機構を備え、それにより、調節可能なアーム210の位置および方向と無関係に、垂直部材220(拡大解釈すれば、それに取り付けられるヨーク230、移動ガントリ240、およびX線源270)をヨー軸222周りに自由に回転させることができる。例えば、垂直部材220は、ヨー軸周りに少なくとも360°以内の任意の角度で回転することができる。
次に、本明細書に記載の例示的実施形態に従う、垂直部材220のサブコンポーネントを、それぞれのハウジングカバーが取り外された垂直部材220および移動ガントリ240を示す図3A〜図3Dおよび図4〜図7に基づいて説明する。図3A〜図3Dおよび図4〜図7に図示されるように、垂直部材220は、垂直部材220を介してチャネルとして働くベアリングアセンブリ223を備える。ヨーク230は、ベアリングアセンブリ223のチャネルに移動可能に抑制され、ベアリングアセンブリ223を通って、従って垂直部材220を通って角をなして変位され得る。本明細書に記載の一例示的実施形態において、ベアリングアセンブリ223は、ヨーク230が垂直部材230を通って角をなして変位するように、そこでヨーク230が回転する少なくとも1つのローラベアリング224を備える。本明細書に記載の他の例示的実施形態において、ベアリングアセンブリは、ボールベアリング、低摩擦性固形ベアリングなどの他のタイプのベアリング、または、ベアリングアセンブリ223を介したヨーク230の低抵抗移動を容易にする他の適切な任意の構成要素を含むことができる。
垂直部材220はまた、少なくとも1つのブレーキ226を備える。一例示的実施形態において、ブレーキ226は、ヨーク230に型締力を加える2つの電気機械的なブレーキを備えることができる。既定状態において、ブレーキ226は、定位置にヨーク230を保持し、ベアリングアセンブリ223を介したヨーク230の任意の動きを実質的に防ぎ、垂直部材220を基準としてヨーク230の位置を固着することができる。ブレーキ解除ボタン228(図2に示す)は、取付けシステム200で提供され、ブレーキ226と連通する。ブレーキ解除ボタン228が押されると、ブレーキ226はヨーク230を解放するように制御し、ついで、ヨーク230は、上述のやり方でベアリングアセンブリ223を自由に通ることができる。
ヨーク230は、円弧形に形成され、2つの端部232および234を備える。より詳細には、本明細書に記載の一例示的実施形態において、ヨーク230は半円形である。ロール軸236は、軸がヨーク230の円心を通り、ヨーク230が横たわる面に直交するように、ヨーク230に関連して定義される。ロール軸236はまた、ヨー軸222に直交する。したがって、垂直部材220を通って、半円形のヨーク230が角をなして変位する行為は、言い換えれば、ロール軸236周りにヨーク230が回転するのと同様に説明することもできる。本明細書に記載の例示的実施形態において、ヨーク230は、単一の自由度に垂直部材220により制限され、すなわち、ロール軸236周りにヨーク230が回転することが制限され、ヨーク230は、180°までロール軸236周りに回転され得る。
本明細書に記載の他の例示的実施形態において、ヨーク230は他の湾曲弧状である。
ブレーキ解除ボタン228(図2)は、例えば、ヨーク230の一端部232または234などの好都合な位置にあることができ、それにより、操作者が、ヨーク230を解放するためにブレーキ226を制御し、ボタン228が置かれる端部232または234によりヨーク230を保持し、および垂直部材220を通ってヨーク230を回転させるために、ブレーキ解除ボタン228を片手で押すことができる。
移動ガントリ240は、図3A〜図3Dおよび図4〜図7に示すように、ヨーク端部232と234との間に取り付けられる。移動ガントリ240は、旋回軸を形成するアタッチメントの各点である、ヨーク端部232および234にそれぞれ移動可能に取り付けられるアーム242および244を備えることができ、それにより、移動ガントリ240は、ヨーク端部232および234を介して実質的に定義され、ロール軸236に実質的に直交するピッチ軸238周りに縦揺れされ得る。一例示的実施形態において、移動ガントリ240は、約±45°の範囲で、ピッチ軸238周りに縦揺れされ得る。本明細書に記載のさらに例示的実施形態において、ピッチ軸238は、ヨーク230の円心と交差し、したがって、ロール軸236とも交差する。さらに一例示的実施形態において、ヨー軸222、ロール軸236およびピッチ軸238は、ヨーク230の円心で互いに交差し、または実質的に互いに近接して交差する。
本明細書に記載の一例示的実施形態において、各ヨーク端部232および234と対応するアーム242および244との間の、移動ガントリ240の均衡(本明細書で以下にさらに記載されるような)および/または静止摩擦力により、ヨーク端部232および234ならびに移動ガントリアーム242および244は、停止の間、互いに関して静止している。したがって、移動ガントリ240は、アタッチメントの点で静止摩擦力に打ち勝つ回転力が加えられることにより縦揺れする。本明細書に記載の一例示的実施形態において、ヨーク端部232および234は、移動ガントリ240のアーム242および244の相補的な軸状部品を受容する円筒状のクランプ環である。あるいは、アーム242および244は、ヨーク端部232および234の相補的な軸状部品を受容する円筒状のクランプ環を含んでよい。
次に、本明細書に記載の例示的実施形態に従う、移動ガントリ240のサブコンポーネントを、図2のそれぞれのハウジングカバーが取り外された垂直部材220および移動ガントリ240ならびに明確さのために種々の斜視図を提供する少なくともいくつかの図を示す、図3A〜図3Dおよび図4〜図7に基づいて説明する。移動ガントリ240は、モータ246、移動ステージ248、モータ246および移動ステージ248の両方に取り付けられたリンク機構250、ならびに移動ステージ248が載せられる1つまたは複数の線形ガイド252を収容する。本明細書に記載の一例示的実施形態において、リンク機構250は、モータ246の回転動作を移動ステージ248の直線動作に変換し、本明細書に記載のさらに例示的実施形態において、リンク機構250は、親ねじであることができる。リンク機構250および線形ガイド252は、ピッチ軸238に実質的に平行な方向に位置調整され、したがって移動ステージ248も、ピッチ軸238に実質的に平行な方向に、移動軸254(例えば、図8および図9A〜図9Cを参照)に沿って移動される。
シャフト256は、移動ステージ248を介して回転可能に配置され、シャフト256の回転軸268は、移動軸254に直交する。詳細には、本明細書に記載の一例示的実施形態において、シャフト256は、実質的に円筒状であり、回転軸268は、円筒状シャフト256の円筒状の軸に一致する。X線源270は、シャフト256により、移動ガントリ240に取り付けられる。
次に、図8および図9A〜図9Cについて説明する。図8および図9A〜図9Cは、本明細書に記載の例示的実施形態に従う、移動ガントリ240およびX線源270の上面図(すなわち、図3Dおよび図4〜図6上で、移動ガントリ240に向かって「A」点から見た)である。図9Aは、シャフト256、アーム258およびガイドピン260を含む根底となる特徴を示すために、移動ステージ248が取り外された点を除けば、図8に示すものと同様の移動ガントリ240を図示する。図9Bおよび図9Cは、図9Aと同じ構成要素(すなわち、移動ガントリ240およびX線源270)をそれぞれ図示するが、次に、移動ガントリ240に含まれるカムシステムにより、移動軸254に沿って種々に回転した異なる位置にあるX線源270を、図8および図9A〜図9C(カムシステムの部品は、図3A〜図3Dおよび図4〜図7の他の部品で確認できるが)に基づいて詳細に説明する。
図8および図9A〜図9Cで図示された例示的実施形態において、移動ガントリ240は、移動ガントリ240のカムプレート263に配置されたカムチャネル262、およびシャフト256にその第1の端部で固定され、ガイドピン260によってカムチャネル262内にその第2の端部で抑制されたアーム258を備えるカムシステムを含む。
図8および図9A〜図9Cに示すように、カムチャネル262は、移動軸254を基準とした角度で動く。移動ステージ248(図8に示す)は、モータ246により移動軸254に沿って、リンク機構250およびガイド(複数可)252上で移動するとき、アーム258のガイドピン260が、カムチャネル262に沿って続いて移動する。例えば、図9Bでは、シャフト256およびX線源270は、移動ガントリアーム242に近いリンク機構250の端部に、モータ246によって(移動ステージ248に取り付けられることにより(図9Bに示されない))移動され、ガイドピン260がアーム258を介してシャフト256に連結されることにより、ガイドピン260は対応して、移動ガントリアーム242に近いカムチャネル262の端部に沿って、続いて移動する。同様に、図9Cでは、シャフト256およびX線源270は、移動ガントリアーム244に近いリンク機構250の端部に、モータ246によって(移動ステージ248に取り付けられることにより(図9Cに示されない))移動され、ガイドピン260がアーム258を介してシャフト256に連結されることにより、ガイドピン260は対応して移動ガントリアーム244に近いカムチャネル262の端部に沿って、続いて移動する。図9Aは、図9Bおよび図9Cにそれぞれ示される位置の途中位置に移動した(モータ246を介した移動ステージ248(図9Aに示されない)の移動による)、シャフト256およびX線源270を示し、図9Aはまた、カムチャネル262内で途中位置にあるガイドピン260を示す。
図9A〜図9Cから理解され得るように、上述のやり方で、移動ステージ248の移動に続いて移動するように、ガイドピン260が角のあるカムチャネル262に抑制されるので、リンク機構250の一端部(例えば、図9Bに示されるような)からリンク機構250の他端部(例えば、図9Cに示されるような)への、モータ246による移動ステージ248(図8に示す)およびシャフト256の移動は、同時にシャフト256に回転を与える。(図3A〜図3Cの斜視図に図示されたそれぞれのX線源の移動および回転に対応する、図9A〜図9Cに図示されたそれぞれのX線源の移動および回転)
一例示的実施形態において、移動ステージ248(拡大解釈すれば、シャフト256およびX線源270)は、合計距離10インチ(254ミリメートル)まで移動され得る。その合計10インチ(254ミリメートル)の移動距離をシャフト256の合計40°の回転に変換するために、カムチャネル262は、移動軸254を基準とした約4.8〜8.5°の角度を有するゆるやかなスプラインに沿い、アーム258は、約2インチ(51ミリメートル)の長さである。上述の移動は、リンク機構250上の端部から端部までの移動の任意の量であることができ、シャフト256の回転度合いは、その移動の量と釣り合っていることが理解されるであろう。
本明細書に記載の一例示的実施形態において、カムプレート263は、移動ガントリ240の構造の固定された不可欠な部分をなす。本明細書に記載の別の例示的実施形態において、カムプレート263は、交換可能であり、移動ガントリに取外し可能に取り付けられ得る。それぞれ複数の交換可能なカムプレートは、種々のカムチャネル設計(例えば、シャフト256の種々の回転を達成するような種々の角度)を有するように用いられ得る。
上述のように、X線源270は、シャフト256に取り付けられ、シャフト256の移動および回転も、X線源270に与えられる。X線源270は、図9A〜図9Cに示すように、放射軸274に沿ってX線を放射する(本明細書に記載の少なくともいくつかの例示的実施形態において、X線源270はまた、放射されるX線を照準する照準器272を備えることができる)。X線源270の照準を定める位置276は、X線源270が移動ガントリ240の2つのアーム242および244の中心にある場合に、定義され(図3Aおよび図9Aに示すように)、放射軸274が移動軸254およびピッチ軸238に直交するように方向づけられ(図3Aおよび図9Aに示すように)、放射軸274はまた、ロール軸236に平行である(図3Aに示すように)。例えば、照準を定める位置276は、図1に関して上述した走査角度112の0°位置であることができる。
上述したシャフト256の同時の移動および回転は、X線源270を、シャフト256へのそのアタッチメントにより、図9A〜図9Cに示すように、照準を定める位置276から±θ°の走査角度で掃引させる。上記の例示的実施形態において、シャフト256の40°の回転は、したがって、X線源270を、照準を定める位置276から±20°の走査角度で掃引させる。
X線源270の回転は、シャフト256を回転させる専用のモータ(すなわち、移動モータ246とは無関係のモータ、図示せず)により達成され得るが、X線源270が、移動モータ246により移動軸254に沿って移動するとき、カムチャネル262およびガイドピン260がシャフト256を回転させるので、そのようなモータは不必要である。したがって、X線源270を回転させるための専用のモータを備える、移動ガントリと比較して、より低重量、より低コストおよびより簡単な設計で、走査角度を通じたX線源の掃引が実現され得る。
X線源270が照準を定める位置276にある場合、以下にさらに本明細書で記載されるやり方で、操作者は、患者290の口腔に入れられた口腔内X線センサ280に向けて、正確におよび容易に、X線源270の照準を定めおよびX線源270を位置調整することができる。(図2の口腔内X線センサ280は、図1のX線センサ102として働くことができる。) X線源270の照準を定めることにおいて操作者を助けるために、様々な参照マーカ(図示せず)が、ヨー軸222、ピッチ軸238、ロール軸236、移動軸254および放射軸274のうちの1つまたは複数に対して、X線源270の照準を示すために、X線源270および/または移動ガントリ240上に配置され得る。そのような標識の例は、線、フィン、リブ、目盛り尺、レーザ投射器などを含み、そのような標識は、移動ガントリ240のハウジング上またはX線源270上に配置され得るが、これらの例に限定されない。
上述の取付けシステム200により、X線源270の位置は、6の自由度内で調節され得る。次に、X線源270の調整性について説明する。
調節可能なアーム210は、3つの移動自由度、すなわち、上下方向、左右方向、および前後方向(他の表現ではまた、垂直方向、水平方向、x方向、y方向、またはz方向を含むが、これらに制限されない方向を、説明のために用いてよい)、をX線源270に与える。
取付けシステム200はまた、3つの回転自由度をX線源270に与える。垂直部材220のスイベル221は、ヨー軸222(図2)周りにX線源270が回転することを可能にする。垂直部材220を介したヨーク230の変位は、実質的にロール軸236周りに、X線源270が回転することを可能にする(図10Aおよび図10Bに示すように)。X線源270は、ヨーク端部232および234を有する旋回軸を形成する移動ガントリアーム242および244により、実質的にピッチ軸238(図2)周りに縦揺れする。
照準を定める位置276において、移動ガントリ240およびX線源270の重心は、重量釣合い位置に置かれ、すなわち、重心は、実質的にヨー軸222、ロール軸236、およびピッチ軸238のうちの2つ以上の交差点と一致する。したがって、ヨーク230は、実質的にジャイロスコープのリングのように働き、垂直部材220を介したヨーク230の回転または移動ガントリ240の縦揺れは、実質的に重心の位置を変えない。さらに、移動ガントリ240およびX線源270は、ロール軸236とピッチ軸238の交差点の近くに、質量を集中させることにより、コンパクトに設計され得るので、ロール軸236およびピッチ軸238それぞれの周りでの慣性モーメントを減らすことができる。
均衡がとれ、緊密に集中した重心によって、移動ガントリ240の縦揺れは、ブレーキの助力なしに、ヨーク端部232と234との間および対応するアーム242と244との間の静止摩擦力により保たれ得る。また、取付けシステム200の重心が均衡されおよび集中されるので、ユーザは、わずかな力で容易に、ヨー軸222、ピッチ軸238、およびロール軸236周りに、それぞれX線源270を偏揺れ、縦揺れ、および回転させることができ、それにより、X線源270の照準を正確に定め、X線源270を正確に位置調整することができる。したがって、X線源270は、患者の口腔内に置かれた口腔内X線センサ280を用いて、照準を定められおよび位置調整され得るので、走査角度を通じて取得された画像の少なくとも実質的に大半において、コーンカットを回避し、実質的に最小限にすることができる。
本明細書に記載の一例示的実施形態において、X線源270および移動ガントリ240(より詳細には、モータ246)は、図1で図示されたコンピュータシステム106と通信し、コンピュータシステム106により制御され得る。例えば、X線源270は、X線を放射するように制御され得、移動ガントリ240は、上述のやり方で、X線源270を移動するように制御され得る。本明細書に記載のいくつかの他の例示的実施形態において、移動ガントリ240は、少なくとも部分的にモータ246および/またはX線源270を制御するように機能する1つまたは複数のステージ上のコントローラ(複数可)264(例えば、図3A〜図3Dに示されるような)を、備えることができる。本明細書に記載のいくつかの例示的実施形態において、コントローラ264は、図1で示されたモータコントローラ120として働くことができる。これらの例は、単に例示的性質のものであり、他の実施形態において、異なる度合いの制御が、コンピュータシステム106とステージ上のコントローラ264との間で供給され得る。
コンピュータシステム
図11は、コンピュータシステム300のブロック図を示す。本明細書に記載の一例示的実施形態において、コンピュータシステム300の少なくともいくつかの構成要素(それらすべての構成要素またはディスプレイユニット328以外のすべて、など)は、図1に示すコンピュータシステム106を形成し、コンピュータシステム106に含まれ得る。コンピュータシステム300は、少なくとも1つのコンピュータプロセッサ322(「コントローラ」とも呼ばれる)を含む。コンピュータプロセッサ322は、例えば、中央処理装置、多重処理装置、特定用途向け集積回路(「ASIC」)、フィールドプログラマブルゲートアレイ (「FPGA」)などを含んでよい。プロセッサ322は、通信インフラ324(例えば、通信バス、クロスオーバーバー装置、またはネットワーク)に接続される。
コンピュータシステム300はまた、ディスプレイユニット328(一例示的実施形態において、ディスプレイユニット108を形成しまたはディスプレイユニット108に含まれ得る)での表示のために、通信インフラ324からのビデオグラフィックス、テキスト、および他のデータを転送する、ディスプレイインタフェース(または他の出力インタフェース)326を含む。
コンピュータシステム300はまた、コンピュータプロセッサ322に情報を送るために、コンピュータシステム300のユーザによって用いられ得る、入力ユニット330を含む。本明細書に記載の一例示的実施形態において、入力ユニット330は、入力ユニット114を形成し、または入力ユニット114に含まれ得る。例えば、入力ユニット330は、キーボードデバイスおよび/あるいはマウスデバイス、または他の入力デバイスを含むことができる。一例示において、ディスプレイユニット328、入力ユニット330、およびコンピュータプロセッサ322は、集合的にユーザインタフェースを形成することができる。
例えば、タッチスクリーンを含む一例示的実施形態において、入力ユニット330およびディスプレイユニット328は、同じユーザインタフェースに結合され、または同じユーザインタフェースを表し得る。そのような実施形態において、ディスプレイユニット328を触るユーザは、ディスプレイユニット328から、例えば、プロセッサ322などのプロセッサに信号を転送することができるディスプレイインタフェース326に、対応する信号を送ることができる。
さらに、コンピュータシステム300は、好ましくは、ランダムアクセスメモリ(「RAM」)であるメインメモリ332を含み、また二次メモリ334を含んでよい。二次メモリ334は、例えば、ハードディスクドライブ336および/またはリムーバブルストレージドライブ338(例えば、フロッピーディスクドライブ、磁気テープドライブ、光ディスクドライブ、フラッシュメモリドライブなど)を含むことができる。リムーバブルストレージドライブ338は、周知のやり方で、リムーバブルストレージユニット340から読み出し、および/またはリムーバブルストレージユニット340に書き込む。リムーバブルストレージユニット340は、例えば、リムーバブルストレージドライブ338によって書き込まれ、および/またはリムーバブルストレージドライブ338から読み出される、フロッピーディスク、磁気テープ、光ディスク、フラッシュメモリデバイスなどであってよい。リムーバブルストレージユニット340は、コンピュータ実行可能ソフトウェア命令および/またはデータを記憶する、非一時的コンピュータ可読記憶媒体を含むことができる。
代替の実施形態において、二次メモリ334は、コンピュータシステム300にロードされるコンピュータ実行可能プログラムまたは他の命令を記憶する、他のコンピュータ可読媒体を含むことができる。そのようなデバイスは、リムーバブルストレージユニット344およびインタフェース342(例えば、ビデオゲームシステムで用いられるものと同様のプログラムカートリッジおよびカートリッジインタフェース)、リムーバブルメモリチップ(例えば、消去可能プログラマブル読取り専用メモリ(「EPROM」)またはプログラマブル読取り専用メモリ(「PROM」))、および関連メモリソケット、ならびにリムーバブルストレージユニット344からコンピュータシステム300の他の部分に、ソフトウェアおよびデータを転送することが可能な他のリムーバブルストレージユニット344およびインタフェース342を含むことができる。
コンピュータシステム300はまた、コンピュータシステム300と外部デバイスとの間で、ソフトウェアおよびデータを転送することが可能な通信インタフェース346を含むことができる。通信インタフェース346の例としては、モデム、ネットワークインタフェース(例えば、イーサネット(登録商標)カードまたはIEEE 802.11 ワイヤレスLANインタフェース)、通信ポート(例えば、ユニバーサルシリアルバス(「USB」)ポートまたはFireWire(登録商標)ポート)、パーソナルコンピュータメモリカード国際協会(「PCMCIA」)インタフェースなどが挙げられる。通信インタフェース346を介して転送されるソフトウェアおよびデータは、信号形式であり、これは、通信インタフェース346によって送信および/または受信することが可能な、電気信号、電磁信号、光信号、または他のタイプの信号であり得る。信号は、通信パス348(例えば、チャネル)を介して通信インタフェース346に提供される。通信パス348は、信号を運び、ワイヤまたはケーブル、ファイバーオプティクス、電話回線、セルリンク、無線周波数(「RF」)リンクなどを用いて実施することができる。通信インタフェース346はまた、コンピュータシステム300とリモートサーバまたはクラウドベースのストレージ(図示せず)との間で、ソフトウェアまたはデータまたは他の情報を転送するのに用いられてもよい。
1つまたは複数のコンピュータプログラム(コンピュータ制御ロジックとも呼ばれる)は、メインメモリ332および/または二次メモリ334に記憶される。コンピュータプログラムはまた、通信インタフェース346を介して受信することができる。コンピュータプログラムは、コンピュータプロセッサ322によって実行された場合に、本明細書に記載される手順を、コンピュータシステム300が行うことが可能なコンピュータ実行可能な命令を含む。したがって、コンピュータプログラムは、トモシンセシスシステム100のコンピュータシステム106および他の構成要素(例えば、X線センサ102およびX線源104)を制御することができる。
本明細書に記載の一例示的実施形態において、ソフトウェアは、非一時的コンピュータ可読記憶媒体に記憶することができ、リムーバブルストレージドライブ338、ハードドライブ336、および/または通信インタフェース346を用いて、コンピュータシステム300のメインメモリ332および/または二次メモリ334にロードすることができる。プロセッサ322によって実行された場合、制御ロジック(ソフトウェア)により、コンピュータシステム300に、より一般的には口腔内トモシンセシスシステム100に、本明細書に記載の手順を行わせる。
別の例示的実施形態において、ASIC、FPGAなどのハードウェアコンポーネントは、本明細書に記載の機能を行うために用いられ得る。本明細書に記載の機能を行うように、かかるハードウェア構成を実施することは、本明細書に鑑みて当業者には明らかであろう。
調節可能なX線源取付けシステムを用いた撮像方法
調節可能な取付けシステム200に取り付けられたX線源270および口腔内X線センサ280(図2)を含む、口腔内トモシンセシスシステム100(図1)を用いたトモシンセシス撮像方法を、次に、方法の一例示的実施形態を示すフローチャートである図12に基づいて説明する。
X線源270を位置調整する前に、患者290は、患者を楽にするために調節され得る歯科用治療椅子(図示せず)に座り、口腔内X線センサ280が、患者の口腔に配置される。本明細書に記載のいくつかの例示的実施形態において、口腔内X線センサ280は、長方形のサイズ0、サイズ1またはサイズ2のセンサであり得、上述のように、これはまた、X線源270の照準を定めおよびX線源270を位置調整するための目標を提供する口腔外ガイド282に、取り付けられ得る。
処理は、ステップS701で開始され、ステップS702で、操作者は、移動軸254に沿って照準を定める位置276にX線源270が移動するように移動ガントリ240を制御するために、入力ユニット114を介してコンピュータシステム106に命令する。
ステップS704で、操作者は、手動で、口腔内X線センサ280(または、必要な場合、口腔外ガイド282を用いて)を用いて、X線源270の照準を定め、X線源270を位置調整するために、上述の1つまたは複数の自由度内(すなわち、上/下移動、左/右移動、前/後移動、ヨー回転、ピッチ回転、およびロール回転)で、取付けシステム200によりX線源270を動かしおよび/または回転させる。
本明細書に記載の一例示的実施形態において、口腔内X線センサ280を基準として、X線源270の照準を定めおよび位置調整するための方法およびデバイスが、米国特許第13/591,979号に記載されるような、本明細書にすべて陳述されるようにその全体が参照により本明細書に組み込まれる、歯科用位置調整システムにより達成され得る。
分岐ブロックS706で、操作者は、口腔内X線センサ280を基準としたX線源270の照準および配置を確認する。X線源270は、放射軸274が実質的にセンサの中心の近くで口腔内X線センサ280に直交して突出し、走査角度112内の各位置でX線源270により放射されたX線が、コーンカットなしで口腔内X線センサ280で受信される場合、適切に照準が定められ、位置調整されたものとみなされる。詳細には、口腔内センサ280が長方形であれば、移動軸254を口腔内X線センサ280の長方形の軸(例えば詳細には、長い方の長方形の軸)の1つに平行になるようにすることができ、ヨーク230を回転させるのに有用であり得る。
X線源270が、分岐ブロックS706で適切に照準が定められず、位置調整されなかったものとみなされた場合、ついで、操作者はX線源270を再位置付けするために、再びステップS702および/またはS704を実行し、続いて、X線源270の照準および配置を確認するために、再びステップS706を実行する。
X線源270が、分岐ブロックS706で適切に照準が定められ、位置調整されたものとみなされた場合、ついで、処理はステップS708に進む。
ステップS708で、上述のやり方で、口腔内トモシンセシスシステム100(図1)は、走査角度112を介して被写体50の直交投射像(すなわち、走査角度112内の0°で、また照準を定める位置276で、X線源270を用いて取得された画像)を含む複数の投射像(例えば、少なくとも患者の歯科解剖学的構造の一部)を、取得するために制御される。
例えば、また上述のように、移動モータ246は、移動軸に沿ってX線源270を移動させるために、またX線源270をカムシステムにより走査角度112を通じて回転させるために、コンピュータシステム106および/またはコントローラ264により制御される。移動と同時に、X線源270は、被写体50を通って放射軸274に沿ってX線を放射するように、コンピュータシステム106および/またはコントローラ264により制御され、口腔内X線センサ280は、その受光面で受光したX線を電気信号に変換し、ついで、その電気信号はコンピュータシステム106に送信される。コンピュータシステム106は、電気信号を処理して、複数の2D投射像を取得し、ついで、さらに複数の投射像を処理して、一連のトモグラフィー画像スライスを再構成する。
処理は、ステップS710で終了する。
前述の記載に鑑みて、本明細書に記載の1つまたは複数の例示的実施形態は、多様な自由度を用いて、操作者が正確にかつ造作なくX線源の照準を定めることが可能な、コンパクトなおよび軽量のトモシンセシスに利用可能なX線源取付けシステムに関することが分かり得る。X線源取付けシステムは、非常に操作しやすく、コンパクトかつ軽量であるので、歯科臨床医は、いすの側で撮像を行うために、ひと続きの空間を犠牲にすることなく(設置スペースを大きくとるCT装置とは対照的に)、先進的なトモシンセシスベースの三次元撮像システムを備え付けることができる。さらに、X線源取付けシステムは、トモシンセシス撮像(制限された走査角度を介してX線源を掃引することによる)および一般的なデジタルX線撮影(X線源の掃引なしで撮像することによる)の両方の実施に用いられ得、したがって、これは臨床医が用いる既存の歯科X線撮影用のX線源に取って代わることができる。
上述の種々の実施形態は、単なる例として示され、限定するものではない。本発明の精神および範囲から逸脱せずに、形態および細部に対して種々の変形を施すことが可能であることが、当業者には明らかである。したがって、本発明は、上述の例示的な実施形態のいずれにも限定されるべきではなく、以下の特許請求の範囲およびそれらと同等のもののみに従って定義されるべきである。
さらに、本明細書に記載の機能を強調する添付図面は、例示として示されていることを理解すべきである。本発明のアーキテクチャは、十分に柔軟性をもって設定可能であるため、図面に示す以外の方法で利用およびナビゲートすることができる。
さらに、本明細書に記載の例示的実施形態は、口腔内トモシンセシス撮像に限定されない。本明細書に記載の例示的実施形態は、他の解剖学的領域の走査を行うために使用することができる。
さらに、要約書の目的は、米国特許商標庁、および、特許あるいは法律の用語および/または言い回しに精通していない一般人、特に、科学者、技師、および当該技術分野(複数可)の医師が、本明細書に開示の技術的主題の性質および本質について一瞥して迅速に判断できるためのものである。要約書は、決して本発明の範囲を限定しようとするものではない。特許請求の範囲で引用される手順は、示した順序で行う必要がないことをまた理解されるものとする。