JP2013102098A - Sensor holding device and sensor holding method - Google Patents
Sensor holding device and sensor holding method Download PDFInfo
- Publication number
- JP2013102098A JP2013102098A JP2011245917A JP2011245917A JP2013102098A JP 2013102098 A JP2013102098 A JP 2013102098A JP 2011245917 A JP2011245917 A JP 2011245917A JP 2011245917 A JP2011245917 A JP 2011245917A JP 2013102098 A JP2013102098 A JP 2013102098A
- Authority
- JP
- Japan
- Prior art keywords
- sensor holding
- voltage
- pressing force
- sensor
- information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




















Landscapes
- Electromagnets (AREA)
Abstract
Description
本発明は、センサを保持するセンサ保持装置およびセンサ保持方法に関する。 The present invention relates to a sensor holding device and a sensor holding method for holding a sensor.
機器や配管等にセンサを取り付けて行う監視または計測(以下、「監視計測」と称する。)では、長期間にわたる監視または計測を行う場合、センサの取付状態は、取付場所の環境状態に影響を受けずに、常時、設定した取付状態(特に押付け力)を維持させることが要求される。 In monitoring or measurement (hereinafter referred to as “monitoring measurement”) performed by attaching a sensor to equipment, piping, etc., when performing monitoring or measurement over a long period of time, the sensor mounting state affects the environmental condition of the mounting location. It is required to maintain the set mounting state (especially pressing force) at all times.
特に、人の立ち入れない雰囲気内や、例えば、複雑、狭隘または気密等によって伝送ケーブル本数に制約がある環境内に機器や配管等の監視計測対象物が配置されている場合であって、監視計測対象物を加工したり、当該監視計測対象物に貼り付けたりする等してセンサを監視計測対象物に取り付けての監視計測ができない場合には、何らかのセンサ保持装置および保持方法が必要となる。 In particular, when monitoring and measuring objects such as equipment and piping are placed in an atmosphere that is not accessible to people or in an environment where the number of transmission cables is restricted due to complexity, narrowness, airtightness, etc. If monitoring measurement cannot be performed by attaching a sensor to the monitoring measurement object by processing the measurement object or attaching it to the monitoring measurement object, some kind of sensor holding device and holding method are required. .
人の立ち入れない雰囲気内等では、センサ保持装置を遠隔から監視計測対象物にマニピュレータ等のアクセス手段を用いて移動させる必要があるため、小型で軽量なセンサ保持装置が望まれる。また、環境条件(温度、放射線)が著しく変化する場合には、耐環境性に優れた強固なセンサ保持装置が必須となる。 In an atmosphere where people cannot enter, the sensor holding device needs to be remotely moved to an object to be monitored and measured using an access means such as a manipulator. Therefore, a small and lightweight sensor holding device is desired. Moreover, when environmental conditions (temperature, radiation) change remarkably, a strong sensor holding device excellent in environmental resistance is essential.
このような事情を反映し、監視計測対象物が磁性材を備える物(機器や配管等)の場合、磁石を用いたセンサ保持装置が提案されている。磁石を用いたセンサ保持装置では、加工や貼り付けを施すことなく、磁石の磁力によって機器や配管等にセンサを保持可能であること、および、ケーブル本数が少なくて済む等の簡素な構成であること、といった利点がある一方で課題もある。 Reflecting such circumstances, a sensor holding device using a magnet has been proposed in the case where an object to be monitored and measured is an object (equipment, piping, etc.) provided with a magnetic material. The sensor holding device using a magnet has a simple configuration such that the sensor can be held in equipment, piping, etc. by the magnetic force of the magnet without processing or sticking, and the number of cables can be reduced. While there are advantages such as, there are also problems.
例えば、センサ保持装置に適用する磁石として永久磁石を用いた場合、機器や配管等の監視計測対象物に吸着(固定)するためのケーブルが不要となるものの、一旦センサを吸着させると、吸着力の調整ができない。そのため、センサの押し付け圧力(押付け力)を調整する作業、センサの取り付けまたは取り外しの作業にかなりの手間を要するという課題がある。 For example, when a permanent magnet is used as a magnet to be applied to the sensor holding device, a cable for adsorbing (fixing) to a monitored measurement object such as equipment or piping is not necessary. Cannot be adjusted. Therefore, there is a problem that considerable work is required for the operation of adjusting the pressing pressure (pressing force) of the sensor and the operation of attaching or removing the sensor.
また、永久磁石は、高温になると吸着力が低下するため、センサが外れないように吸着力の大きい永久磁石の採用や、吸着力を調整する機能を追加する必要があり、形状の大型化または機構の複雑化および高価格化という課題がある。 In addition, since the attracting force of the permanent magnet decreases at high temperatures, it is necessary to use a permanent magnet with a large attracting force and to add a function to adjust the attracting force so that the sensor does not come off. There is a problem of complicated mechanism and high price.
さらに、昨今、商品化されている小型で強力な永久磁石の多くは、コバルト材を含有した磁石であるため、このようなコバルト材を含有した磁石を高レベルの放射線雰囲気内で使用する場合、磁石に含まれるコバルトが放射線で放射化してしまい、使用後の取り扱いが困難になる場合があるという課題もある。 Furthermore, since many of the small and powerful permanent magnets that have been commercialized these days are magnets containing a cobalt material, when using such a magnet containing a cobalt material in a high-level radiation atmosphere, There is also a problem that cobalt contained in the magnet is activated by radiation, and handling after use may be difficult.
一方、センサ保持装置に適用する磁石として電磁石を用いた場合、永久磁石を用いる場合には不要な励磁電流を供給するケーブルが必要になる点で、センサ保持装置に適用する磁石として永久磁石を用いる場合よりも構造がやや複雑化するものの、励磁電流を制御することで、センサ保持装置に適用する磁石として永久磁石を用いる場合には調整不能であった吸着力を、容易に、かつ、遠隔で調整することができる。励磁電流を制御することで、センサ保持装置に適用する電磁石の磁力を調整して監視計測対象物への吸着力を調整する技術は、例えば、特開2003−59716号公報(特許文献1)等に記載される。 On the other hand, when an electromagnet is used as a magnet to be applied to the sensor holding device, a permanent magnet is used as a magnet to be applied to the sensor holding device because a cable for supplying an unnecessary exciting current is required when using a permanent magnet. Although the structure is slightly more complicated than in the case, by controlling the excitation current, the attractive force that could not be adjusted when using a permanent magnet as the magnet applied to the sensor holding device can be easily and remotely controlled. Can be adjusted. For example, Japanese Patent Application Laid-Open Publication No. 2003-59716 (Patent Document 1) or the like is known as a technique for adjusting the magnetic force of an electromagnet applied to a sensor holding device by adjusting the excitation current to adjust the attraction force to the monitoring measurement object. It is described in.
上記特許文献1に記載されるような従来のセンサ保持装置では、励磁電流を制御することで、センサ押付け力を調整することができるので、センサ保持装置に永久磁石を用いると比較して、センサの押し付け圧力(押付け力)を調整する作業、センサの取り付けまたは取り外しの作業が容易になる利点がある。また、高レベルの放射線雰囲気内で使用したとしても、コバルト材を含有した永久磁石のような放射化の課題は招来し得ないので、取り扱いが比較的容易であるという利点もある。
In the conventional sensor holding device as described in
図19は従来のセンサ保持装置およびセンサ保持方法の一例を示す概略図である。また、図20および図21は、それぞれ、センサ保持部に永久磁石を適用した場合およびセンサ保持部に電磁石を適用した場合における従来のセンサ保持装置の装置構成を示した構成図である。 FIG. 19 is a schematic view showing an example of a conventional sensor holding device and sensor holding method. FIGS. 20 and 21 are configuration diagrams showing the device configuration of a conventional sensor holding device when a permanent magnet is applied to the sensor holding unit and when an electromagnet is applied to the sensor holding unit, respectively.
図19において、符号1は、監視計測対象物である配管2が貫通する隔離室である。従来のセンサ保持装置100のセンサ保持部101は、例えば、配管2に亀裂が生じていないかを検出する亀裂検出用のAEセンサ(超音波トランスジューサ)等のセンサ102を保持するセンサ保持具103と、センサ保持具103に取り付けられ、例えば二個等の複数個の永久磁石104で構成される配管2への吸着手段とを備える。
In FIG. 19, the code |
センサ102の先端部には、センサプローブ105があり、監視計測対象物2と接触している。センサプローブ105で検出する信号は、伝送ケーブル106で、隔離室1の外部に備えるセンサ信号処理装置107に送信される。センサ信号処理装置107は、センサプローブ105で検出する信号を常時受信しており、受信した信号に基づいて、監視計測対象物である配管2における亀裂発生の有無を判定する処理を行っている。
A
例えば、図21等に示される電磁石108を吸着手段として用いたセンサ保持装置100では、永久磁石104を吸着手段として用いたセンサ保持装置100と同様に、亀裂検出用のAEセンサ(超音波トランスジューサ)等のセンサ102が取り付けられており、センサ102の先端部には、センサプローブ105があり、監視計測対象物2と一定の押付け圧で接触している。そして、センサプローブ105で検出される信号を取得したセンサ信号処理装置107が取得した信号に基づいて監視計測対象物である配管2における亀裂発生の有無を判定する。
For example, in the
電磁石108を吸着手段として用いたセンサ保持装置100は、隔離室1の外部に備える直流定電流電源109を有する電源回路110から電磁石コイルに励磁電流(Ic)を供給して電磁石108として働かせることで(電磁吸着)、センサプローブ105を監視計測対象物である配管2に押し付ける。センサプローブ105を配管2に押し付ける圧力の増減は、直流定電流電源109から供給する励磁電流(Ic)を調整することによって行うことができる。
The
センサ保持装置100のセンサ保持部101に磁石、すなわち、永久磁石104または電磁石108を用いる場合、ケーブル本数が少なくて済む等の構造が比較的簡素であり、センサ保持装置100を使用する周囲温度や放射線量がほとんど変化しない等の比較的安定した環境下であれば、センサプローブ105を配管2に押し付ける押付け力の変化は少ない。
When a magnet, that is, a
しかし、人が入れない雰囲気内で、温度や放射線量が著しく変化するような環境下でセンサ保持装置100等の従来のセンサ保持装置を使用する場合、センサプローブ105を配管2に押し付ける押付け力は変化が大きくなるため、従来の永久磁石104または電磁石108を用いたセンサ保持装置100を適用するのは困難である。特に、一旦取り付けけると、押付け力の加減を調整することができない永久磁石104を用いた従来のセンサ保持装置100を適用するのは困難である。
However, when a conventional sensor holding device such as the
また、センサ保持装置100の磁石として電磁石108を採用したとしても、温度が変化すると押付け力(吸着力)が変化するため、人が立ち入りできない環境の厳しい現場や複雑で狭隘な現場で適用する場合には、押付け力調整して、常時、設定した取付状態(特に押付け力)を維持できることが必要となる。そして、複雑で狭隘な現場で適用する場合には、アクセス装置(マニピュレータ等)を用いて遠隔でセンサを取り付ける作業が発生するため、アクセス性の関係等から小型かつ軽量でケーブル数が少なく、取付状態を遠隔で把握できることが必要である。
Further, even when the
すなわち、人が立ち入りできない環境の厳しい現場や複雑で狭隘な現場で従来の磁石を用いたセンサ保持装置100およびセンサ保持方法を適用する場合、センサ保持部101の取り付けおよび取り外しが容易であること、遠隔で押付状態の検出および調整ができること、センサ保持部101が小型かつ軽量であること、および、ケーブル数が少ないことを満たす必要がある。
That is, when applying the
本発明は、上述した事情を考慮してなされたものであり、従来よりも構成を大幅に複雑化させることなく、人が立ち入りできない環境の厳しい現場や複雑で狭隘な現場であっても適用でき、遠隔でセンサ保持部の監視計測対象物への押付け力を求めること、および、求めた押付け力の強弱に応じて容易に押付け力の強弱を調整することができるセンサ保持装置およびセンサ保持方法を提供することを目的とする。 The present invention has been made in consideration of the above-described circumstances, and can be applied to a severe environment or a complicated and narrow site where a person cannot enter without greatly complicating the configuration compared to the conventional one. A sensor holding device and a sensor holding method capable of remotely determining the pressing force of the sensor holding unit on the monitoring measurement object and easily adjusting the strength of the pressing force according to the obtained pressing force strength The purpose is to provide.
本発明の実施形態に係るセンサ保持装置は、上述した課題を解決するため、監視または計測の対象物である監視計測対象物に接触させるセンサを保持し、励磁電流の供給を受けて磁力を発生させる電磁石コイルを備えるセンサ保持部と、前記電磁石コイルへ直流電流を供給する直流電流供給部と、前記電磁石コイルへ高周波電流を供給する高周波電流供給部と、前記直流電流供給部から前記電磁石コイルへ供給される直流電流に、前記高周波電流供給部から供給する高周波電流を重畳する交流成分重畳部と、前記電磁石コイルの両端の電圧信号の交流成分を抽出して交流電圧を計測する交流電圧測定部と、前記電磁石コイルの両端の電圧信号の直流成分を抽出して直流電圧を計測する直流電圧測定部と、を具備することを特徴とする。 In order to solve the above-described problem, a sensor holding device according to an embodiment of the present invention holds a sensor that is in contact with a monitoring / measurement object that is an object of monitoring or measurement, and generates a magnetic force upon receiving an excitation current. A sensor holding unit including an electromagnet coil, a DC current supply unit that supplies a DC current to the electromagnet coil, a high frequency current supply unit that supplies a high frequency current to the electromagnet coil, and the DC current supply unit to the electromagnet coil An AC component superimposing unit that superimposes a high-frequency current supplied from the high-frequency current supplying unit on a supplied DC current, and an AC voltage measuring unit that extracts an AC component of a voltage signal at both ends of the electromagnetic coil and measures an AC voltage And a DC voltage measuring unit for measuring a DC voltage by extracting a DC component of a voltage signal at both ends of the electromagnet coil.
本発明の実施形態に係るセンサ保持方法は、上述した課題を解決するため、監視または計測の対象物である監視計測対象物に接触させるセンサを保持し、励磁電流の供給を受けて磁力を発生させる電磁石コイルを備える手段と、前記電磁石コイルへ前記励磁電流として直流電流を供給する手段および高周波電流を供給する手段と、前記電磁石コイルへ供給される直流電流に、前記高周波電流を供給する手段から供給する高周波電流を重畳する手段と、前記電磁石コイルの両端の電圧信号の交流成分および前記高周波電流を供給する手段の両端の電圧信号の少なくとも一方を用いて、前記センサを前記監視計測対象物に押し付ける押付け力と既知の関係にある前記監視計測対象物との距離を示す近接距離に対して既知の関係を示す物理量を求める手段と、前記電磁石コイルの両端の電圧信号の直流成分を抽出して直流電圧を計測する手段と、前記近接距離に対して既知の関係を示す物理量を求める手段が求めた物理量と前記既知の関係を用いて前記押付け力を算出する手段と、前記押付け力を算出する手段が算出した押付け力が予め設定される範囲内ない場合に当該範囲内に収まるように前記押付け力を制御する手段と、を具備するセンサ保持装置を適用したセンサ保持方法であり、前記高周波電流を供給する手段が、前記電磁石コイルへ高周波電流を供給するステップと、前記高周波電流を重畳する手段が、前記直流電流を供給する手段から前記電磁石コイルへ供給する直流電流に前記電磁石コイルへ高周波電流を供給するステップで前記電磁石コイルに供給される高周波電流を重畳するステップと、前記近接距離に対して既知の関係を示す物理量を求める手段が、前記電磁石コイルの両端の電圧信号の交流成分および前記高周波電流を供給する手段の両端の電圧信号の少なくとも一方を用いて、前記センサを前記監視計測対象物に押し付ける押付け力と既知の関係にある前記監視計測対象物との距離を示す近接距離に対して既知の関係を示す物理量を求めるステップと、を備える。 In order to solve the above-described problem, a sensor holding method according to an embodiment of the present invention holds a sensor to be in contact with a monitoring or measurement object that is an object of monitoring or measurement, and generates a magnetic force by receiving an excitation current. Means for providing an electromagnet coil, means for supplying a DC current as the excitation current to the electromagnet coil, means for supplying a high-frequency current, and means for supplying the high-frequency current to the DC current supplied to the electromagnet coil Using at least one of means for superimposing a high frequency current to be supplied, an AC component of a voltage signal at both ends of the electromagnet coil, and a voltage signal at both ends of the means for supplying the high frequency current, the sensor is attached to the monitoring measurement object. A physical quantity indicating a known relationship with respect to a proximity distance indicating a distance from the monitoring measurement object having a known relationship with the pressing force to be pressed is obtained. The physical quantity obtained by the means, the means for extracting the direct current component of the voltage signal at both ends of the electromagnet coil and measuring the direct current voltage, and the means for obtaining the physical quantity indicating the known relation to the proximity distance and the known relation Means for calculating the pressing force using the control unit, and means for controlling the pressing force so that the pressing force calculated by the means for calculating the pressing force is within a preset range when the pressing force is not within a preset range; A method for holding a sensor, comprising: a step of supplying the high-frequency current to the electromagnetic coil; and a means for superimposing the high-frequency current supplying the direct current. The high frequency current supplied to the electromagnet coil is overlapped with the direct current supplied to the electromagnet coil from the step of supplying the high frequency current to the electromagnet coil. And at least one of the AC component of the voltage signal at both ends of the electromagnet coil and the voltage signal at both ends of the means for supplying the high-frequency current. A physical quantity indicating a known relationship with respect to a proximity distance indicating a distance from the monitoring measurement object having a known relationship with a pressing force for pressing the sensor against the monitoring measurement object.
以下、本発明の実施形態に係るセンサ保持装置およびセンサ保持方法について、添付の図面を参照して説明する。 Hereinafter, a sensor holding device and a sensor holding method according to embodiments of the present invention will be described with reference to the accompanying drawings.
(構成)
図1は、本発明の実施形態に係るセンサ保持装置およびセンサ保持方法の適用例を示す概略図である。
(Constitution)
FIG. 1 is a schematic diagram illustrating an application example of a sensor holding device and a sensor holding method according to an embodiment of the present invention.
本発明の実施形態に係るセンサ保持装置の一例であるセンサ保持装置10は、物理量を検出するセンサ11を保持するセンサ保持部12と、センサ保持部12の保持状態を監視(モニタリング)する監視部(図1において図示せず)と、を具備する。
A
図1に示されるセンサ保持装置10では、例えば、人が原則として立ち入れない空間の一例である隔離室1に配設された監視計測の対象物(監視計測対象物)の一例である配管2にセンサ保持部12が取り付けられており、センサ11が検出した物理量を示す信号は、センサ11と隔離室1と壁3を隔てた外部の領域に設置された監視部を有する制御盤(図1において図示せず)と信号伝送可能に接続される配線13を通してセンサ11から監視部へ伝送される。
In the
図2は、本発明の実施形態に係るセンサ保持装置の一例であるセンサ保持装置10が具備するセンサ保持部12の構成例をより詳細に示した構成図である。
FIG. 2 is a configuration diagram showing the configuration example of the
センサ保持部12は、電磁石コイル16と、鉄心17と、非磁性材で構成されるセンサ固定具18とを備えて構成される。ここで、符号13aは電磁石コイル16に励磁電流を供給する配線であり、符号13bはセンサ11が検出した物理量を示す信号を伝送する配線である。
The
センサ保持部12は、電磁石コイル16に励磁電流が供給されると、励磁電流により生じる磁界に起因する磁力により、磁性材で構成された配管(監視計測対象物)2に吸着する。センサ11は、センサ固定具18によって電磁石コイル16および鉄心17と一体化しており、電磁石コイル16の電磁的な吸着力によって配管2に押し付けられる。
When an excitation current is supplied to the
図3は、本発明の実施形態に係るセンサ保持装置の一例であるセンサ保持装置10のうち、隔離室1の外側(室外)の構成例を示した構成図である。
FIG. 3 is a configuration diagram illustrating a configuration example of the outside (outdoor) of the
図3に示されるように、隔離室1の壁3の外側において、制御盤20が設置されており、制御盤20には、センサ保持部12の保持状態を監視する監視部としての保持状態モニタ回路21と、電磁石コイル16に励磁電流(直流)を供給する電源回路22と、センサ11から伝送される信号処理してセンサ11が検出した物理量の情報を取得するセンサ信号処理回路23とが設けられる。保持状態モニタ回路21と電源回路22とは並列に接続される。
As shown in FIG. 3, a
図4は、本発明の実施形態に係るセンサ保持装置の一例であるセンサ保持装置10が具備する監視部としての保持状態モニタ回路21の構成例を示した構成図である。
FIG. 4 is a configuration diagram illustrating a configuration example of the holding
保持状態モニタ回路21は、直流電流供給部としての電源回路22から電磁石コイル16へ供給される励磁電流(直流)に、高周波電流供給部としての高周波電源26から電磁石コイル16へ供給する励磁電流(交流)を重畳させる交流成分重畳部としての結合器27と、電磁石コイル16の両端の電圧信号から交流成分を抽出して計測する交流電圧測定部としての第1のフィルタ28および交流電圧測定器29と、電磁石コイル16の両端の電圧信号から直流成分を抽出して計測する直流電圧測定部としての第2のフィルタ30および直流電圧測定器31と、を備える。
The holding
保持状態モニタ回路21において、結合器27と、第1のフィルタ28と、第2のフィルタ30とが並列に接続されて構成されており、結合器27は電源回路22と接続されるライン32とスイッチSWを介して接続される。また、結合器27、第1のフィルタ28および第2のフィルタ30には、それぞれ、高周波電源26、交流電圧測定器29および直流電圧測定器31が直列に接続されている。
In the holding
高周波電源26は、例えば、後述する図5に示されるように、高周波電源26から供給される電流を励磁電流とする電磁石を電導体の一例である配管2に接近させた際に、配管2にうず電流が生じる程度に高い周波数の交流定電流電源である。
For example, as shown in FIG. 5 to be described later, the high
第1のフィルタ28は、高周波電源26の高周波成分を通過させる機能を有するフィルタである。第1のフィルタ28は、例えば、遮断周波数(カットオフ周波数)よりも低い周波数成分を遮断し、遮断周波数よりも高い周波数成分を通過させる高域通過フィルタ(ハイパスフィルタ:HPF)で構成される。
The
交流電圧測定器29は、交流電圧を計測する測定器である。保持状態モニタ回路21では、高周波電源26の電圧信号のうち、第1のフィルタ28を通過した高周波成分(交流電圧)を計測する。
The AC
第2のフィルタ30は、高周波電源26の直流成分を通過させる機能を有するフィルタである。第2のフィルタ30は、例えば、遮断周波数(カットオフ周波数)よりも高い周波数成分を遮断し、遮断周波数よりも低い周波数成分を通過させる低域通過フィルタ(ローパスフィルタ:LPF)で構成される。
The
直流電圧測定器31は、直流電圧を計測する測定器である。保持状態モニタ回路21では、高周波電源26の電圧信号のうち、第2のフィルタ30を通過した直流成分(直流電圧)を計測する。
The DC
なお、第1のファイルタ28は、直流成分を含む低周波成分を遮断するとともに、信号成分として有効な周波数帯(高周波成分)を通過させるフィルタであれば良いので、必ずしも、ハイパスフィルタに限られない。例えば、高周波数側にもカットオフ周波数が設定された帯域通過フィルタ(バンドパスフィルタ:BPF)であっても良い。
The
また、図4において、交流電圧測定器29および直流電圧測定器31は、それぞれ、第1のフィルタ28および第2のフィルタ30と別々に構成されているが、一体的に構成されていても良い。すなわち、第1のフィルタ28が交流電圧測定器29に内蔵されていても良いし、第2のフィルタ30が直流電圧測定器31に内蔵されていても良い。
In FIG. 4, the AC
(測定原理)
図5はセンサ保持部12の電磁石コイル16に高周波電流を流した際に生じる現象を概略的に示した説明図である。
(Measurement principle)
FIG. 5 is an explanatory diagram schematically showing a phenomenon that occurs when a high-frequency current is passed through the
高周波電源36から高周波定電流を電磁石コイル16に流すと、図5に示されるように、近接する電導体の一例である配管2の表面近傍にうず電流が流れて、電磁石コイル16の電圧を減少させる作用(逆起電力)が生じる。ここで、図5に示されるVは、電磁石コイル16の両端の電圧(電磁石電圧)である。
When a high-frequency constant current is supplied from the high-
図6は電磁石コイル16と配管2との距離が変化した場合における電磁石コイル16の両端の電圧(電磁石電圧)の振幅と位相の変化を説明する図であり、図6(A)が電磁石コイル16と配管2との距離が遠い場合における基準波形38と観測波形39とを示す説明図、図6(C)が近い場合における基準波形38と観測波形39とを示す説明図である。なお、図6(B)は電磁石コイル16と配管2との距離が図6(A)に示される場合よりも近く図6(C)に示される場合よりも遠い(以下、単に「中程度」と称する。)場合における基準波形38と観測波形39とを示す説明図である。
FIG. 6 is a diagram for explaining changes in the amplitude and phase of the voltage (electromagnet voltage) at both ends of the
電磁石コイル16の電圧の振幅および位相ずれは、図6(A)〜図6(C)に示されるように、電磁石コイル16と配管2との距離が近い程、振幅は小さくなり、高周波波形の遅れ位相ずれは大きくなることがわかる。従って、保持状態中の電磁石コイル16の両端の電圧Vを検出すれば、センサ保持部12と監視計測対象物の一例である配管2との距離(近接距離)を求めることができる。
As shown in FIGS. 6 (A) to 6 (C), the amplitude and phase shift of the voltage of the
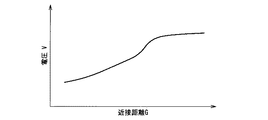
図7は、電導体と電磁石コイル16との距離である近接距離Gと電磁石コイル16の両端の電圧Vとの関係を示す説明図(グラフ)である。
FIG. 7 is an explanatory diagram (graph) showing the relationship between the proximity distance G, which is the distance between the conductor and the
電磁石コイル16に高周波定電流を流した場合の電磁石コイル16間の電圧は、電流供給開始時に逆起電力が発生するが、その後、十分な時間が経過する(定常状態になる)と、電磁石コイル16の導体抵抗による電圧降下分の直流電圧のみとなる。この直流電圧、すなわち、定常状態における電磁石コイル16間の電圧を検出すれば、電磁石コイル16の導体抵抗を求めることができる。電磁石コイル16を構成する配線13aの抵抗値と温度との関係を事前に調べておくことによって、求めた電磁石コイル16の導体抵抗から電磁石コイル16の周囲の温度を求めることができる。
When a high-frequency constant current is passed through the
また、近接距離とセンサ保持部12が保持するセンサを監視計測対象物となる配管2へ押し付ける圧力(押付け力)とは、所定の関係性を有するため、電磁石コイル16の周囲の温度における近接距離を求めれば、配管2への押付け力を求めることができる。
Further, the proximity distance and the pressure (pressing force) that presses the sensor held by the
次に、本発明の各実施形態に係るセンサ保持装置およびセンサ保持方法について、説明する。 Next, a sensor holding device and a sensor holding method according to each embodiment of the present invention will be described.
[第1の実施形態]
図8は、本発明の第1の実施形態に係るセンサ保持装置の一例である第1のセンサ保持装置10Aの構成を示した構成図である。
[First Embodiment]
FIG. 8 is a configuration diagram showing a configuration of a first
第1のセンサ保持装置10Aは、センサ保持部12と、センサ保持部12の保持状態を監視(モニタリング)する監視部としての第1の保持状態モニタ回路21Aおよび電源回路22と、を具備する。
The first
第1の保持状態モニタ回路21Aは、保持状態モニタ回路21の一例であり、例えば、図8に示されるように、電磁石コイル16へ励磁電流(高周波信号)Ifを供給する高周波電源26と、電源回路22の直流定電流電源35から電磁石コイル16へ供給される励磁電流Icに励磁電流Ifを重畳させる結合器27と、所定の周波数よりも低い周波数を遮断し高周波電源26の高周波成分を通過させる第1のフィルタ28と、第1のフィルタ28から出力される信号の電圧値を計測する交流電圧測定器29と、高周波電源26の高周波成分を通過させずに直流成分のみを通過させる第2のフィルタ30と、第2のフィルタ30から出力される信号の電圧値を計測する直流電圧測定器31と、を備える。
The first holding
電源回路22は、電磁石コイル16に任意の励磁電流Icを供給するもので、電磁石コイル16の負荷(抵抗など)が変動しても一定電流を供給することのできる直流定電流電源35で構成される。
The
次に、第1のセンサ保持装置10Aにおけるセンサ保持方法、すなわち、監視計測対象物となる配管2への押付け力を算出方法および調整方法について説明する。
Next, a sensor holding method in the first
図9は、図8に示される計測点PA〜PDにおいて測定される波形を示した説明図であり、図9(A)、図9(B)、図9(C)および図9(D)は、それぞれ、計測点PA,PB,PCおよびPDで測定される波形を示した説明図である。 FIG. 9 is an explanatory diagram showing waveforms measured at the measurement points P A to P D shown in FIG. 8, and FIG. 9 (A), FIG. 9 (B), FIG. 9 (C) and FIG. D), respectively, the measurement point P a, P B, is an explanatory diagram showing a waveform measured by P C and P D.
図9(A)に示される波形は、電磁石コイル16に直流定電流電源35から励磁電流Icと高周波電源26からの励磁電流Ifが重畳させて印加している状態での電磁石コイル16に発生する電圧波形である。すなわち、図9(D)に示される電磁石コイル16に発生する電圧の直流成分(直流電圧波形)に、図9(C)に示される電磁石コイル16に発生する電圧の高周波(交流)成分(高周波電圧波形)が重畳した電圧波形である。
The waveform shown in FIG. 9A is generated in the
なお、直流定電流電源35から磁石コイル16に供給される励磁電流Icと高周波電源26からの励磁電流Ifを重畳させて印加している状態では、計測点PBにおける電圧波形は、図9(B)に示されるように、直流成分に交流成分(高周波成分)が重畳した波形となる。
In the state where the excitation current Ic supplied from the DC constant
第1のセンサ保持装置10Aのセンサ保持部12がセンサを監視計測対象物(配管2)へ押し付ける圧力(以下、単に「押付け力」と称する。)を算出するにあたっては、まず、準備として、電磁石コイル16の周囲の温度Tと電磁石コイル16の導体抵抗Rcとの関係(抵抗値特性)と、異なる周囲温度における近接距離Gと電磁石コイル16の両端の電圧(電磁石電圧)Vfsとの関係(近接距離特性)と、近接距離Gと監視計測対象物(配管2)への押付け力Fとの関係(押付け力特性)を事前に求めておく。
In calculating the pressure (hereinafter simply referred to as “pressing force”) by which the
図10〜図12は、それぞれ、事前に求める各種特性を説明する説明図(グラフ)であり、図10は電磁石コイル16の抵抗値特性を説明する説明図、図11は近接距離特性を説明する説明図、図12は押付け力特性を説明する説明図である。
10 to 12 are explanatory diagrams (graphs) for explaining various characteristics obtained in advance, FIG. 10 is an explanatory diagram for explaining the resistance value characteristics of the
図10では、縦軸に電磁石コイル16の導通時の抵抗を示す導体抵抗Rcを、横軸に電磁石コイル16の周囲温度を示す温度Tをとって、導体抵抗Rcと温度Tとの関係が表されている。そして、導体抵抗Rcは、温度Tの一次関数(Rc=A1・T+B1)として近似される。ここで、係数A1は0以外の整数、係数B1は整数であり、一般にはA1およびB1は正の整数となる。
In FIG. 10, the vertical axis represents the conductor resistance Rc indicating the resistance when the
第1の保持状態モニタ回路21Aの直流電圧測定器31で測定される直流電圧Vdの測定値を得ることによって、電磁石コイル16の導体抵抗Rcを求めることができるので、電磁石コイル16の導体抵抗Rcの近似式(Rc=A1・T+B1)、すなわち、電磁石コイル16の抵抗値特性の情報があれば、電磁石コイル16の抵抗値特性と求めた導体抵抗Rcから当該導体抵抗Rcにおける温度Tを求めることができる。
The conductor resistance Rc of the
図11(A)は温度Tにおける近接距離特性を示す説明図であり、縦軸に近接距離Gを、横軸に電磁石コイル16の電磁石電圧Vfsをとって、近接距離Gと電磁石電圧Vfsとの関係が表されている。ここで、近接距離Gは、温度Tの一次関数(G=Ac(T)・Vfs+Bc(T))として近似される。ここで、温度Tは、例えば、n(nは2以上の自然数)個の異なる温度T1,T2,…,Tnであり、係数Ac(T)および係数Bc(T)は、それぞれ、温度Tの関数である。
FIG. 11A is an explanatory diagram showing the proximity distance characteristic at the temperature T. The proximity distance G is taken on the vertical axis, and the electromagnet voltage Vfs of the
図11(B)は係数Acと温度Tとの関係を示す説明図であり、図11(C)は係数Bcと温度Tとの関係を示す説明図である。 FIG. 11B is an explanatory diagram showing the relationship between the coefficient Ac and the temperature T, and FIG. 11C is an explanatory diagram showing the relationship between the coefficient Bc and the temperature T.
図11(B)では、縦軸に係数Acを、横軸に温度Tをとって、係数Acと温度Tとの関係が表されている。図11(B)に示されるように、関数Ac(T)は右下がりの関係、すなわち、温度Tが上昇すると係数Acは減少する関係にある。また、図11(C)では、縦軸に係数Bcを、横軸に温度Tをとって、係数Bcと温度Tとの関係が表されている。図11(C)に示されるように、関数Bc(T)は右下がりの関係、すなわち、温度Tが上昇すると係数Bcは減少する関係にある。 In FIG. 11B, the coefficient Ac is plotted on the vertical axis and the temperature T is plotted on the horizontal axis, and the relationship between the coefficient Ac and the temperature T is represented. As shown in FIG. 11 (B), the function Ac (T) has a downward-sloping relationship, that is, the coefficient Ac decreases as the temperature T increases. In FIG. 11C, the relationship between the coefficient Bc and the temperature T is shown with the coefficient Bc on the vertical axis and the temperature T on the horizontal axis. As shown in FIG. 11C, the function Bc (T) is in a downward-sloping relationship, that is, the coefficient Bc decreases as the temperature T increases.
第1の保持状態モニタ回路21Aでは、交流電圧測定器29で測定される電磁石電圧Vfsの測定値を得ることができるので、近接距離特性の情報があれば、直流電圧測定器31で測定される直流電圧Vdと電磁石コイル16の抵抗値特性とから求められた温度における近接距離特性と、電磁石電圧Vfsの測定値とを用いて近接距離Gを求めることができる。
In the first holding
図12では、縦軸にセンサを監視計測対象物(配管2)への押し付ける押付け力Fを、横軸に近接距離Gをとって、押付け力Fと近接距離Gとの関係が表されている。そして、押付け力Fは、近接距離Gの一次関数(F=Ag・G+Bg)として近似される。ここで、係数Agは0以外の整数、係数Bgは整数であり、一般に、Agは負の整数、Bgは正の整数となる。 In FIG. 12, the relationship between the pressing force F and the proximity distance G is shown with the pressing force F pressing the sensor against the monitoring measurement object (pipe 2) on the vertical axis and the proximity distance G on the horizontal axis. . The pressing force F is approximated as a linear function (F = Ag · G + Bg) of the proximity distance G. Here, the coefficient Ag is an integer other than 0 and the coefficient Bg is an integer. In general, Ag is a negative integer and Bg is a positive integer.
第1の保持状態モニタ回路21Aでは、近接距離Gを求めることができるので、押付け力特性の情報があれば、求めた近接距離Gと押付け力特性とから求めた近接距離Gにおける押付け力を求めることができる。
Since the first holding
上述したように、電磁石コイル16の抵抗値特性、近接距離特性および押付け力特性を事前に求めておくことによって、電磁石コイル16の電磁石電圧Vfsおよび直流電圧Vdの測定値を得れば、電磁石コイル16の周囲の温度、所定温度における近接距離Gおよび当該近接距離Gの場合における押付け力を算出することができる。すなわち、電磁石コイル16の電磁石電圧Vfsおよび直流電圧Vdを測定することによって、押付け力を監視することができる。
As described above, if the measured values of the electromagnet voltage Vfs and the DC voltage Vd of the
第1のセンサ保持装置10Aにおいて、センサ保持部12が保持するセンサを配管2へ押し付ける押付け力を算出するのに必要な情報は、事前に電磁石コイル16の抵抗値特性、近接距離特性および押付け力特性を求めておくこと、並びに、第1のセンサ保持装置10Aの操作者が以下のステップを行うことによって、得ることができる。
In the first
まず、操作者は、何らかのアクセス装置を用いて、配管2等の監視計測対象物に第1のセンサ保持装置10Aを接近させ、スイッチSWを閉じて(オンの状態に切り替え)、電源回路22から設定した直流電流(励磁電流Ic)を電磁石コイル16に供給させてセンサ保持部12を吸着させる。但し、人がアクセスできる環境下であれば上記アクセス装置に代わって人が配管2に第1のセンサ保持装置10Aを接近させても良い。その後、操作者は、直流電圧測定器31が指示する電圧値を読み、電磁石コイル16両端の直流電圧Vdを測定する。
First, the operator uses a certain access device to bring the first
続いて、高周波電源26を起動させて、スイッチSWを開いて(オフの状態に切り替えて)、電磁石コイル16へ直流電流を供給している線に高周波信号(励磁電流If)を重畳させた状態で、交流電圧測定器29が指示する電圧値を読む。すなわち、電磁石コイル16両端の交流電圧(電磁石電圧)Vfsを測定する。
Subsequently, the high
直流電圧Vdおよび電磁石電圧Vfsの測定を完了すれば、事前に求めた電磁石コイル16の抵抗値特性、近接距離特性と、押付け力特性と、測定して得られる電磁石コイル16の電磁石電圧Vfsおよび直流電圧Vdを用いて、電磁石コイル16の周囲の温度、電磁石コイル16の周囲の温度における近接距離Gおよび当該近接距離Gにおける押付け力を算出することができる。
When the measurement of the DC voltage Vd and the electromagnet voltage Vfs is completed, the resistance value characteristic, the proximity distance characteristic, the pressing force characteristic, and the electromagnet voltage Vfs and DC of the
また、センサ保持部12が保持するセンサを監視計測対象物としての配管2へ押し付ける圧力(押付け力)を算出することができれば、押し付け力の監視が可能となる。さらに、算出した押付け力が必要とする押付け力よりも大きいか小さいかに応じて、押付け力の増減、すなわち、押付け力の制御が可能となる。
Moreover, if the pressure (pressing force) which presses the sensor held by the
第1のセンサ保持装置10Aにおける押付け力の制御は、直流定電流電源35から電磁石コイル16へ供給する励磁電流Icを増減させることによってなされる。具体的には、現在の押付け力が必要とする押付け力よりも強く、配管2への押付け力を弱めたい場合、直流定電流電源35から電磁石コイル16へ供給する励磁電流Icを減少させる。一方、現在の押付け力が必要とする押付け力よりも弱く、配管2への押付け力を強めたい場合、直流定電流電源35から電磁石コイル16へ供給する励磁電流Icを増加させる。
The pressing force in the first
第1のセンサ保持装置10Aおよび第1のセンサ保持装置10Aで適用されるセンサ保持方法によれば、電磁石コイル16に発生する電圧の高周波(交流)成分である電磁石電圧Vfsおよび直流成分である直流電圧Vdを計測することができる。従って、計測によって得られた電磁石電圧Vfsおよび直流電圧Vdと、事前に求めておいた電磁石コイル16の抵抗値特性、近接距離特性および押付け力特性とを用いることで、ユーザは、センサ保持部12の監視計測対象物(配管2)への押付け力を求めることができる。
According to the first
また、第1のセンサ保持装置10Aおよび第1のセンサ保持装置10Aで適用されるセンサ保持方法によれば、センサ保持部12の監視計測対象物への押付け力を求めることができるので、ユーザは、求めた押付け力の大小に応じて、直流定電流電源35から電磁石コイル16へ供給する励磁電流Icを増減させることができるので、容易に押付け力の強弱を制御することができる。
Further, according to the sensor holding method applied in the first
さらに、監視計測対象物への押付け力の算出および押付け力の強弱制御は、遠隔で行うことができるので、監視計測対象物が存在する環境が、人が入れない雰囲気内で、環境(温度、放射線)が著しく変化する条件下であっても、適用することができる。 Furthermore, since the calculation of the pressing force on the monitoring measurement object and the strength control of the pressing force can be performed remotely, the environment where the monitoring measurement object exists can be controlled in the atmosphere (temperature, Even under conditions where the radiation) changes significantly, it can be applied.
さらにまた、従来のセンサ保持装置に対して、センサ保持部12側(図に示される隔離室1の室内)のケーブル数は増加しないので、マニピュレータ等のアクセス装置を用いて遠隔でセンサを取り付ける作業が発生したとしても、従来のセンサ保持装置と同等のアクセス性を維持することができる。
Furthermore, since the number of cables on the side of the sensor holding unit 12 (in the
[第2の実施形態]
図13は本発明の第2の実施形態に係るセンサ保持装置の一例である第2のセンサ保持装置10Bの構成を示した構成図である。
[Second Embodiment]
FIG. 13 is a configuration diagram showing a configuration of a second
第2のセンサ保持装置10Bは、第1のセンサ保持装置10Aに対して、センサ保持部12が保持するセンサを監視計測対象物としての配管2へ押し付ける圧力(押付け力)を算出する押付け力算出処理部および押付け力算出処理部が算出した押付け力が指定した押付け力となるように制御する押付け力制御部としてのコントローラ45、デジタル信号をアナログ信号に変換するデジタル/アナログ変換器(以下、「D/A変換器」と称し、図においては「D/A」と示す。)46およびアナログ信号をデジタル信号に変換するアナログ/デジタル変換器(以下、「A/D変換器」と称し、図において「A/D」と示す。)47をさらに具備する点で相違するが、その他の点は実質的に相違しない。
The second
そこで、本実施形態では、第1のセンサ保持装置10Aに対して実質的に相違する点を中心に説明し、第1のセンサ保持装置10Aと実質的に同一となる構成要素については同一の符号を付して、説明を省略する。
Therefore, in the present embodiment, the description will focus on the points that are substantially different from the first
第2のセンサ保持装置10Bは、第1のセンサ保持装置10Aに対して、押付け力を算出する押付け力算出処理部と、押付け力算出処理部が算出した押付け力が、指定した押付け力となるように制御する押付け力制御部とをさらに具備し、例えば、押付け力算出処理部および押付け力算出処理部としてのコントローラ45と、D/A変換器46およびA/D変換器47とをさらに具備する。ここで、D/A変換器46およびA/D変換器47は、コントローラ45と第1の保持状態モニタ回路21Aとのインターフェイスである。
In the second
押付け力算出処理部としてのコントローラ45は、アナログ信号である測定交流電圧測定器29で測定される電磁石コイル16の電磁石電圧Vfsと直流電圧測定器31で測定される直流電圧Vdとを、A/D変換器47を介して、それぞれ、デジタル信号に変換して取り込む。コントローラ45は、事前に求めておいた電磁石コイル16の抵抗値特性、近接距離特性および押付け力特性の情報を有しており、取り込んだ電磁石電圧Vfs(デジタル信号)および直流電圧Vdのデジタル信号と、事前に求めておいた電磁石コイル16の抵抗値特性、近接距離特性および押付け力特性を用いて配管2への押付け力を算出する。
The
また、押付け力制御部としてのコントローラ45は、センサ保持部12が保持するセンサを配管2へ押し付ける圧力(押付け力)が指定した押付け力となるように制御する制御指令(デジタル信号)をD/A変換器46でデジタル信号からアナログ信号へ変換して、電源回路22および第1の保持状態モニタ回路21Aへ与える。
Further, the
より詳細に説明すれば、コントローラ45は、電源回路22の直流定電流電源35へ出力電流指令を送信して励磁電流Icを制御する。また、コントローラ45は、第1の保持状態モニタ回路21Aの高周波電源26へ出力周波数指令と出力電圧指令を送信して励磁電流Ifを制御する。コントローラ45が励磁電流Icおよび励磁電流Ifを制御することによって、配管2への押付け力が制御される。
More specifically, the
次に、第2のセンサ保持装置10Bにおけるセンサ保持方法、すなわち、監視計測対象物となる配管2への押付け力を算出方法および調整方法について説明する。
Next, a sensor holding method in the second
第2のセンサ保持装置10Bにおいて、センサ保持部12が保持するセンサを配管2へ押し付ける圧力(押付け力)を算出する押付け力算出手順および調整(制御)する調整(制御)手順は、例えば、以下に示すステップ(1)〜(8)に従って行われる。
In the second
(1)配管2等の監視計測対象物に第2のセンサ保持装置10Bを接近させ、スイッチSWを閉じて(オンの状態に切り替え)、電源回路22から設定した直流電流(励磁電流Ic)を電磁石コイル16に供給し、センサ保持部12を配管2に吸着させる。監視計測対象物に第2のセンサ保持装置10Bを接近させる作業は何らかのアクセス装置を用いて行う。但し、人がアクセスできる環境下であれば上記アクセス装置の代わりに人が行っても良い。
(1) The second
(2)直流電圧測定器31で測定した電磁石コイル16両端の直流電圧Vdの測定データをインターフェイスとなるA/D変換器47を介してコントローラ45に取り込む。
(2) The measurement data of the DC voltage Vd across the
(3)コントローラ45は、取り込んだ直流電圧測定器31で測定した直流電圧Vdの測定データから電磁石コイル16の導体抵抗Rcを算出し、算出した導体抵抗Rcと電磁石コイル16の周囲の温度Tとの関係を示す近似式(電磁石コイル16の抵抗値特性:Rc=A1・T+B1)の情報を用いて、電磁石コイル16の周囲の温度Tを算出する。
(3) The
(4)高周波電源26を起動し、スイッチSWを開いて(オフの状態に切り替えて)、電磁石コイル16へ直流電流を供給している線に高周波信号(励磁電流If)を重畳させる。
(4) The high-
(5)交流電圧測定器29で測定した電磁石コイル16両端の交流電圧(電磁石電圧)Vfsの測定データをインターフェイスとなるA/D変換器47を介して、コントローラ45に取り込む。
(5) The measurement data of the AC voltage (electromagnet voltage) Vfs across the
(6)コントローラ45は、事前に求めておいた近接距離特性と、取り込んだ交流電圧測定器29で測定した交流電圧(電磁石電圧)Vfsと、算出した導体抵抗Rcの周囲の温度Tとを用いて、温度Tにおける電磁石電圧Vfsと近接距離Gとの関係を示す近似式(近接距離特性)から近接距離Gを算出する。
(6) The
(7)コントローラ45は、事前に求めておいた押付け力特性と、算出した近接距離Gとを用いて、近接距離Gの場合における押付け力Fを算出する。
(7) The
(8)コントローラ45は、算出したセンサへの押付け力Fの値(算出値)と設定したセンサ押付け力の値(設定値)とを比較する。比較した結果、算出値が設定値より大きい場合には、D/A変換器46を介して電磁石コイル16に供給する電流値を減少させる指令を電源回路22の直流定電流電源35へ出力する。逆に、算出値が設定値より小さい場合には、電磁石コイル16に供給する電流値を増加させる指令を電源回路22の直流定電流電源35へ出力する。
(8) The
以降、上記ステップ(2),(3),(5),(6),(7),(8)の処理を連続的に繰り返すことによって、第2のセンサ保持装置10Bは、センサ保持部12を取り付けた監視計測対象物としての配管2の周囲温度が大きく変化したとしても、コントローラ45が、常時、押付け力を所定範囲内に維持することができる。
Thereafter, the second
第2のセンサ保持装置10Bおよび第2のセンサ保持装置10Bで適用されるセンサ保持方法によれば、押付け力算出部としてのコントローラ45が、電磁石コイル16に発生する電圧の高周波(交流)成分である電磁石電圧Vfsおよび直流成分である直流電圧Vdを計測し、計測によって得られた電磁石電圧Vfsおよび直流電圧Vdと、事前に求めておいた電磁石コイル16の抵抗値特性、近接距離特性および押付け力特性とを用いてセンサ保持部12の監視計測対象物(配管2)への押付け力を求めることができるので、押付け力を監視することができる。
According to the sensor holding method applied in the second
また、第2のセンサ保持装置10Bおよび第2のセンサ保持装置10Bで適用されるセンサ保持方法によれば、押付け力制御部としてのコントローラ45が、求めた押付け力と設定される押付け力とを比較し、その結果に応じて、直流定電流電源35から電磁石コイル16へ供給する励磁電流Icを増減させることができるので、容易に押付け力の強弱を制御することができる。
Further, according to the sensor holding method applied in the second
なお、上述した本実施形態の説明において、第2のセンサ保持装置10Bは、一例としてコントローラ45と第1の保持状態モニタ回路21Aとの間にインターフェイスとなるD/A変換器46およびA/D変換器47を備えているが、当該インターフェイスをコントローラ45または第1の保持状態モニタ回路21Aが備える構成であっても良い。
In the description of the present embodiment described above, the second
また、上述した本実施形態の説明において、コントローラ45が事前に求めておいた電磁石コイル16の抵抗値特性、近接距離特性および押付け力特性の情報を有していると説明したが、電磁石コイル16の抵抗値特性、近接距離特性および押付け力特性の情報は、コントローラ45が読み出し可能な記憶領域内に保持されていれば良く、必ずしも、コントローラ45が有している必要はない。
In the description of the present embodiment described above, it has been described that the
さらに、第2のセンサ保持装置10Bは、押付け力算出処理部と押付け力制御部とを具備しているが、必ずしも、押付け力算出処理部および押付け力制御部の両処理部を具備する必要はない。例えば、第2のセンサ保持装置10Bの操作者が押付け力の算出結果を判断してから押付け力の制御を行う等、コンピュータにより押付け力の制御を行わないのであれば、押付け力制御部を具備しないセンサ保持装置を構成することもできる。
Further, the second
[第3の実施形態]
図14は、本発明の第3の実施形態に係るセンサ保持装置の一例である第3のセンサ保持装置10Cの構成を示した構成図である。
[Third Embodiment]
FIG. 14 is a configuration diagram showing a configuration of a third sensor holding device 10C which is an example of a sensor holding device according to the third embodiment of the present invention.
第3のセンサ保持装置10Cは、第2のセンサ保持装置10Bに対して、第1の保持状態モニタ回路21Aの代わりに、第2の保持状態モニタ回路21Bを具備する点と、コントローラ45が有する情報の内容の点で相違するが、その他の点は実質的に相違しない。そこで、本実施形態では、第2のセンサ保持装置10Bに対して実質的に相違する点を中心に説明し、第2のセンサ保持装置10Bと実質的に同一となる構成要素については同一の符号を付して、説明を省略する。
The third sensor holding device 10C has a second holding
第3のセンサ保持装置10Cは、第2のセンサ保持装置10Bに対して、第1の保持状態モニタ回路21Aの代わりに、第2の保持状態モニタ回路21Bを具備する。すなわち、第3のセンサ保持装置10Cは、第2のセンサ保持装置10Bと比較して、センサ保持部12の保持状態を監視(モニタリング)する監視部の構成が異なっている。
The third sensor holding device 10C includes a second holding
第2の保持状態モニタ回路21Bは、第1の保持状態モニタ回路21Aに対して、第1の保持状態モニタ回路21Aが備える交流電圧測定器29の代わりに、高周波電源26から出力される電圧と電磁石コイル16の電磁石電圧との位相差を計測する位相差測定部としての位相差検出器49と、高周波電源26から出力される電圧を位相差検出器49に入力する際に通過させる第1のフィルタ(ハイパスフィルタ)28をさらに備える。
The second holding
すなわち、第2の保持状態モニタ回路21Bを具備する第3のセンサ保持装置10Cでは、電磁石コイル16と監視計測対象物の一例である配管2との近接距離Gを求めるための情報として、高周波電源26から出力される電圧と電磁石コイル16の電磁石電圧との位相差を用いる。
That is, in the third sensor holding device 10C including the second holding
図15は位相差Pと近接距離Gとの関係(近接距離特性)を示す説明図であり、縦軸に近接距離Gを、横軸に高周波電源26から出力される電圧と電磁石コイル16の電磁石電圧との位相差をとって、近接距離Gと位相差Pとの関係が表されている。
FIG. 15 is an explanatory diagram showing the relationship (proximity distance characteristic) between the phase difference P and the proximity distance G. The vertical axis indicates the proximity distance G, the horizontal axis indicates the voltage output from the high-
位相差Pと近接距離Gとの関係は、図15に示されるように、相関があり、かつ、事前に求めることができるので、第3のセンサ保持装置10Cでは、第2のセンサ保持装置10Bで使用される電磁石電圧Vfsと近接距離Gとの関係(図11(A))の代わりに、位相差Pと近接距離Gとの関係(図15)を用いて近接距離Gが求められる。
As shown in FIG. 15, the relationship between the phase difference P and the proximity distance G has a correlation and can be obtained in advance. Therefore, in the third sensor holding device 10C, the second
次に、第3のセンサ保持装置10Cにおけるセンサ保持方法、すなわち、監視計測対象物となる配管2への押付け力を算出方法および調整方法について説明する。
Next, a sensor holding method in the third
なお、第3のセンサ保持装置10Cにおけるセンサ保持方法は、第2のセンサ保持装置10Bにおけるセンサ保持方法に対して、監視計測対象物の一例である配管2との近接距離Gを求める際に、電磁石電圧を用いるか、位相差を用いるかの点で相違するが、その他の点では実質的に相違しない。すなわち、第2の実施形態で説明されるステップ(1)〜(8)のうち、ステップ(5),(6)については相違するが、その他のステップについては実質的に相違しない。そこで、以下の説明では、第2のセンサ保持装置10Bにおけるセンサ保持方法と相違するステップ(5),(6)について説明し、相違しない他のステップについては説明を省略する。
Note that the sensor holding method in the third sensor holding device 10C is similar to the sensor holding method in the second
第3のセンサ保持装置10Cにおける押付け力算出手順および調整(制御)手順のステップ(5)および(6)は、以下の通りである。 Steps (5) and (6) of the pressing force calculation procedure and the adjustment (control) procedure in the third sensor holding device 10C are as follows.
(5)位相差検出器49は、第1のフィルタ28を介して高周波電源26から出力する電圧と、第1のフィルタ28を介して電磁石コイル16両端の電圧とを取り込み、位相差時間値を計測する。コントローラ45は、位相差検出器49で計測した位相差の測定データ(位相差時間値)をインターフェイスとなるA/D変換器47を介して、コントローラ45に取り込む。
(5) The
(6)コントローラ45は、事前に求めておいた近接距離特性(位相差Pに対する近接距離Gの関係を示す近似式)の情報と、取り込んだ位相差Pの情報と、算出した導体抵抗Rcの周囲の温度Tとを用いて、温度Tにおける位相差Pと近接距離Gとの関係を示す近似式(近接距離特性)から近接距離Gを算出する。
(6) The
第3のセンサ保持装置10Cおよび第3のセンサ保持装置10Cで適用されるセンサ保持方法によれば、第2のセンサ保持装置10Bおよび第2のセンサ保持装置10Bで適用されるセンサ保持方法で使用する情報とは異なる情報、すなわち、高周波電源26から出力する電圧と電磁石コイル16両端の電圧との位相差と、位相差Pと近接距離Gとの関係を示す情報とを用いて、第2のセンサ保持装置10Bおよび第2のセンサ保持装置10Bで適用されるセンサ保持方法と同様の効果を得ることができる。
According to the sensor holding method applied in the third sensor holding device 10C and the third sensor holding device 10C, used in the sensor holding method applied in the second
なお、図14に示される第3のセンサ保持装置10Cは、第2のセンサ保持装置10Bが具備する第1の保持状態モニタ回路21Aの代わりに、第2の保持状態モニタ回路21Bを具備する構成としたが、第2のセンサ保持装置10Bではなく第1のセンサ保持装置10Aに対して適用しても良い。すなわち、第3のセンサ保持装置10Cを、第1のセンサ保持装置10Aが具備する第1の保持状態モニタ回路21Aの代わりに、第2の保持状態モニタ回路21Bを具備する構成としても良い。
Note that the third sensor holding device 10C shown in FIG. 14 includes a second holding
[第4の実施形態]
図16は、本発明の第4の実施形態に係るセンサ保持装置の一例であるセンサ保持装置10Dの構成を示した構成図である。
[Fourth Embodiment]
FIG. 16 is a configuration diagram showing a configuration of a sensor holding device 10D which is an example of a sensor holding device according to the fourth embodiment of the present invention.
第4のセンサ保持装置10Dは、他(第1−3,5)のセンサ保持装置10A,10B,10C,10Eが具備するセンサ保持部12の代わりに、センサ保持部51を具備する点で相違するが、その他の点は実質的に相違しない。そこで、本実施形態では、他(第1−3,5)のセンサ保持装置10A,10B,10C,10Eに対して実質的に相違する点を中心に説明し、他(第1−3,5)のセンサ保持装置10A,10B,10C,10Eと実質的に同一となる構成要素については同一の符号を付して、説明を省略する。
The fourth sensor holding device 10D is different in that the
例えば、図16に示される第4のセンサ保持装置10Dは、第3のセンサ保持装置10Cが具備するセンサ保持部12の代わりに、センサ保持部51を具備する。センサ保持部51は、電磁石コイル16を適用して監視計測対象物としての配管2に吸着するセンサ保持部12に対して、さらに永久磁石52を備えており、電磁石と永久磁石52という異なる二種類の磁石によって、配管2に吸着することができる。
For example, the fourth sensor holding device 10D shown in FIG. 16 includes a
次に、図16に示される第4のセンサ保持装置10Dを例にして、第4のセンサ保持装置10Dにおけるセンサ保持方法について説明する。 Next, a sensor holding method in the fourth sensor holding device 10D will be described by taking the fourth sensor holding device 10D shown in FIG. 16 as an example.
図16に示される第4のセンサ保持装置10Dにおけるセンサ保持方法では、第3のセンサ保持装置10Cにおけるセンサ保持方法に対して、センサ保持部51の吸着方法、すなわち、ステップ(1)が相違するが、他のステップについては実質的に相違しない。そこで、以下の説明では、第3のセンサ保持装置10Cにおけるセンサ保持方法と相違するステップ(1)について説明し、相違しない他のステップについては説明を省略する。
The sensor holding method in the fourth sensor holding device 10D shown in FIG. 16 differs from the sensor holding method in the third sensor holding device 10C in the suction method of the
第4のセンサ保持装置10Dにおけるセンサ保持方法、すなわち、監視計測対象物となる配管2への押付け力を算出方法および調整方法では、ステップ(1)において、センサ保持部51を配管2等の監視計測対象物に吸着させる。センサ保持部51の配管2への吸着させる際には、コントローラ45が、まず、永久磁石52の吸引力に対して電磁石コイル16に供給する電流を逆方向に流し、センサ保持部51全体としての吸引力を減少させておき、その後、徐々にセンサ保持部51全体としての吸引力を増加させてセンサ保持部51を配管2に近接させる。
In the sensor holding method in the fourth sensor holding device 10D, that is, the method for calculating and adjusting the pressing force on the
第4のセンサ保持装置10Dおよび第4のセンサ保持装置10Dで適用されるセンサ保持方法によれば、他のセンサ保持装置10A,10B,10C,10Eおよび他のセンサ保持装置10A,10B,10C,10Eで適用されるセンサ保持方法と同様に、押付け力の監視および所望の範囲内に保持するように制御することができる。
According to the sensor holding method applied in the fourth sensor holding device 10D and the fourth sensor holding device 10D, the other
また、第4のセンサ保持装置10Dは、永久磁石52の他に電磁石としての電磁石コイル16を備えるセンサ保持部51を具備するので、永久磁石52のみを備える従来のセンサ保持装置では成し得ない吸着力の調整を、容易に、かつ、遠隔で行うことができる。すなわち、第4のセンサ保持装置10Dによれば、永久磁石52のみを備える従来のセンサ保持装置よりも、センサ保持部51を配管2等の監視計測対象物に着脱する作業が容易になる。
Further, the fourth sensor holding device 10D includes the
さらに、第4のセンサ保持装置10Dが電磁石としての電磁石コイル16の他に永久磁石52を備えるセンサ保持部51を具備することで、電磁石コイル16に供給する励磁電流Icを、従来または他のセンサ保持装置10A,10B,10C,10Eよりも小さく抑えることができる。すなわち、第4のセンサ保持装置10Dでは、電磁石コイル16に励磁電流Icを供給する電源回路22および電磁石コイル16(より詳細には電磁石コイル16を構成する配線13a)の許容電流をより小さく抑えることができる。
Further, the fourth sensor holding device 10D includes the
第4のセンサ保持装置10Dでは、従来または他のセンサ保持装置10A,10B,10C,10Eに比べ、電源回路22および電磁石コイル16の許容電流を小さくできるので、電源回路22を小型化でき、電磁石コイル16の配線13aを細線化でき、電磁石コイル16の発熱量を緩和することができる。
In the fourth sensor holding device 10D, the allowable current of the
なお、第4のセンサ保持装置10Dは、図16に示される第4のセンサ保持装置10Dに限定されない。すなわち、センサ保持部12を具備するセンサ保持装置であれば良く、第3のセンサ保持装置10Cに限らず、上述した第1のセンサ保持装置10Aおよび第2のセンサ保持装置10B並びに後述する第5のセンサ保持装置10Eに適用できる。
The fourth sensor holding device 10D is not limited to the fourth sensor holding device 10D shown in FIG. That is, any sensor holding device including the
[第5の実施形態]
図17は、本発明の第5の実施形態に係るセンサ保持装置の一例である第5のセンサ保持装置10Eの構成を示した構成図である。
[Fifth Embodiment]
FIG. 17 is a configuration diagram showing a configuration of a fifth
第5のセンサ保持装置10Eは、第3のセンサ保持装置10Cに対して、第2の保持状態モニタ回路21Bの代わりに、第3の保持状態モニタ回路21Cを具備する点と、コントローラ45が有する情報の内容の点で相違するが、その他の点は実質的に相違しない。そこで、本実施形態では、第3のセンサ保持装置10Cに対して実質的に相違する点を中心に説明し、第3のセンサ保持装置10Cと実質的に同一となる構成要素については同一の符号を付して、説明を省略する。
The fifth
第5のセンサ保持装置10Eは、センサ保持部12と、センサ保持部12の保持状態を監視(モニタリング)する監視部としての第3の保持状態モニタ回路21Cおよび電源回路22と、を具備する。すなわち、第5のセンサ保持装置10Eは、第3のセンサ保持装置10Cと比較して、センサ保持部12の保持状態を監視(モニタリング)する監視部の構成が異なっている。
The fifth
第3の保持状態モニタ回路21Cは、第2の保持状態モニタ回路21Bに対して、高周波電源26の周波数を変更する周波数可変機能と、位相差検出器49に入力する際に通過させる第1のフィルタ(ハイパスフィルタ)28の帯域を変更する通過帯域可変機能とを有する。
The third holding
第3の保持状態モニタ回路21Cを具備する第5のセンサ保持装置10Eでは、他の保持状態モニタ回路21A,21Bを具備する他のセンサ保持装置10A〜10Dのように、高周波電源26の周波数は固定ではなく、異なる複数の周波数に変化させることができるので、配管2等の監視計測対象物の周囲の構造(厚みや材質)および状態に変化が生じた場合であっても、異なる複数の周波数で高周波電源26の電源周波数を設定して測定を行えば、複数データの中から感度の良い周波数の信号を選んで抽出することができる。
In the fifth
第5のセンサ保持装置10Eにおけるコントローラ45は、他のセンサ保持装置10A〜10Dにおけるコントローラ45に対して、高周波電源26の周波数を可変する周波数変更指令を与えて高周波電源26の周波数を可変制御する周波数制御部と、第1のフィルタ28を通過する信号の周波数帯域を変更する帯域変更指令を与えて第1のフィルタ28を通過する信号の周波数帯域を可変制御する信号通過帯域制御部とをさらに備える。
The
周波数可変制御部および信号通過帯域可変制御部としてのコントローラ45は、第3の保持状態モニタ回路21Cに対して、高周波電源26の周波数を可変する周波数変更指令および第1のフィルタ28を通過する信号の周波数帯域を変更する帯域変更指令を与えることで、第3の保持状態モニタ回路21Cにおける高周波電源26の周波数および第1のフィルタ28の信号通過帯域を変更することができる。
The
図18は、高周波電源26の周波数f、位相差検出器49が検出する位相差Pおよび配管2等の監視計測対象物(電導体)と電磁石コイル16との距離である近接距離Gの関係を示す説明図である。より詳細には、図18(A)は周波数fを変化させた場合における位相差Pに対する近接距離Gの関係を示す説明図であり、図18(B)は近接距離Gを変化させた場合における周波数fに対する位相差Pの関係を示す説明図である。なお、図18は温度Tが一定の場合を示している。
FIG. 18 shows the relationship between the frequency f of the high-
図18(A)に示される図(グラフ)と、図18(B)に示される図(グラフ)とは、同じ内容を異なる視点から示した内容であり、周波数f、位相差Pおよび近接距離Gが所定の関係にあることを示している。例えば、図18(A)に示されるように、近接距離Gは、位相差Pの一次関数(G=Ap(f)・P+Bp(f))として近似される。ここで、周波数fは、例えば、n(nは2以上の自然数)個の異なる周波数f1,f2,…,fnであり、係数Ap(f)および係数Bp(f)は、それぞれ、周波数fの関数である。 The diagram (graph) shown in FIG. 18A and the diagram (graph) shown in FIG. 18B show the same content from different viewpoints, and the frequency f, phase difference P, and proximity distance. G indicates that there is a predetermined relationship. For example, as shown in FIG. 18A, the proximity distance G is approximated as a linear function of the phase difference P (G = Ap (f) · P + Bp (f)). Here, the frequency f is, for example, n (n is a natural number of 2 or more) different frequencies f1, f2,..., Fn, and the coefficient Ap (f) and the coefficient Bp (f) It is a function.
位相差Pと近接距離Gとの関係は、事前に、ある周波数(例えばf1)において位相差Pを順次変化させた場合の近接距離Gを測定し、続いて周波数を順次変更し(例えばf2,…,fn)、同様の測定を行うことで求めることができる。一方、周波数fと位相差Pとの関係は、事前に、ある近接距離(例えばG1)において周波数fを順次変化させた場合の位相差Pを測定し、続いて近接距離を順次変更し(例えばG2,…,Gn)、同様の測定を行うことで求めることができる。 The relationship between the phase difference P and the proximity distance G is determined in advance by measuring the proximity distance G when the phase difference P is sequentially changed at a certain frequency (for example, f1), and then sequentially changing the frequency (for example, f2, .., Fn) can be obtained by performing the same measurement. On the other hand, the relationship between the frequency f and the phase difference P is determined in advance by measuring the phase difference P when the frequency f is sequentially changed at a certain proximity distance (for example, G1), and then sequentially changing the proximity distance (for example, G2,..., Gn) can be obtained by performing the same measurement.
次に、第5のセンサ保持装置10Eにおけるセンサ保持方法について説明する。
Next, a sensor holding method in the fifth
第5のセンサ保持装置10Eにおけるセンサ保持方法では、第3のセンサ保持装置10Cにおけるセンサ保持方法に対して、コントローラ45が信号の取り込みを行う際に、高周波電源26の周波数を変更する点と、変更した高周波電源26の周波数に応じて第1のフィルタ28を通過させる周波数帯域を変更する点で相違するが、他のステップについては実質的に相違しない。すなわち、上述したステップ(1)〜(8)のうち、ステップ(6)については相違するが、その他のステップについては、実質的に相違しない。そこで、以下の説明では、第3のセンサ保持装置10Cにおけるセンサ保持方法と相違するステップについて説明し、相違しない他のステップについては説明を省略する。
In the sensor holding method in the fifth
第5のセンサ保持装置10Eにおける押付け力算出手順および調整(制御)手順のステップ(6)は、以下の通りである。
Step (6) of the pressing force calculation procedure and the adjustment (control) procedure in the fifth
(6)コントローラ45は、事前に求めておいた位相差Pと近接距離Gとの関係または周波数fと位相差Pとの関係の情報と、取り込んだ位相差Pの情報と、コントローラ45が現在制御している高周波電源26の周波数fの情報とを用いて、近接距離Gを算出する。
(6) The
例えば、取り込んだ位相差Pの値がP1であり、高周波電源26の周波数fの値がf1であった場合、コントローラ45が位相差Pと近接距離Gとの関係を示す情報を近接距離Gの算出に用いる場合には、周波数f1の場合における位相差Pと近接距離Gとの関係を示す情報を用いて、位相差P1となる近接距離Gを求めることができる。一方、周波数fと位相差Pとの関係の情報を近接距離Gの算出に用いる場合には、近接距離G1,G2,…,Gnにおける周波数fと位相差Pとの関係を示す情報から、周波数f1の場合に位相差がP1となる近接距離Gは近接距離G1,G2,…,Gnのうち、何れであるかを求めることができる。
For example, if the captured phase difference P value is P1 and the frequency f value of the high
なお、高周波電源26の周波数fを変化させた場合には、変化させた後の周波数で、ステップ(5)〜(8)の処理を行う。
In addition, when the frequency f of the high
第5のセンサ保持装置10Eおよび第5のセンサ保持装置10Eで適用されるセンサ保持方法によれば、第3のセンサ保持装置10Cおよび第3のセンサ保持装置10Cで適用されるセンサ保持方法と同様に、第2のセンサ保持装置10Bおよび第2のセンサ保持装置10Bで適用されるセンサ保持方法と同様の効果を得ることができるのに加え、高周波電源26の周波数fを変化させて押付け力を求めることができるので、監視計測対象物の周囲の構造(厚みや材質)および周囲状態の変化が生じた場合でも、異なる周波数fのうち、感度の良い周波数の信号のみを選択して抽出することができる。
According to the sensor holding method applied in the fifth
なお、図17に示される第5のセンサ保持装置10Eは、第3のセンサ保持装置10Cが具備する第2の保持状態モニタ回路21Bの代わりに、第3の保持状態モニタ回路21Cを具備する構成としたが、第1の保持状態モニタ回路21Aの代わりに、第3の保持状態モニタ回路21Cを具備する構成としても良い。すなわち、第1の保持状態モニタ回路21A対して、高周波電源26の周波数を変更する周波数可変機能と、位相差検出器49に入力する際に通過させる第1のフィルタ(ハイパスフィルタ)28の帯域を変更する通過帯域可変機能とをさらに有する第3の保持状態モニタ回路21Cを構成しても良い。
Note that the fifth
以上、センサ保持装置10(10A〜10E)およびセンサ保持装置10で適用されるセンサ保持方法によれば、センサ保持部12,51の監視計測対象物(配管2)への押付け力を求めることができ、求めた押付け力の大小に応じて、直流定電流電源35から電磁石コイル16へ供給する励磁電流Icを増減させることができるので、押付け力の強弱を容易に制御することができる。
As described above, according to the sensor holding device 10 (10A to 10E) and the sensor holding method applied in the
また、センサ保持部12,51の監視計測対象物への押付け力の算出および押付け力の強弱制御は、遠隔で行うことができるので、監視計測対象物が存在する環境が、人が入れない雰囲気内で、環境(温度、放射線)が著しく変化する条件下であっても、適用することができる。
In addition, since the calculation of the pressing force of the
さらに、従来のセンサ保持装置に対して、センサ保持部12、51側(図に示される隔離室1の室内)のケーブル数は増加しないので、アクセス装置(マニピュレータ等)を用いて遠隔でセンサを取り付ける作業が発生したとしても、従来のセンサ保持装置と同等のアクセス性を維持することができる。
Furthermore, since the number of cables on the
なお、本発明は上記実施形態そのままに限定されるものではなく、実施段階では、上述した実施例以外にも様々な形態で実施することが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、追加、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。 It should be noted that the present invention is not limited to the above-described embodiment as it is, and can be implemented in various forms other than the above-described examples in the implementation stage, and various modifications can be made without departing from the spirit of the invention. Can be omitted, added, replaced, or changed. These embodiments and modifications thereof are included in the scope and gist of the invention, and are included in the invention described in the claims and the equivalents thereof.
1 隔離室
2 配管(監視計測対象物)
3 壁
10(10A,10B,10C,10D,10E) センサ保持装置
11 センサ
12 センサ保持部
13(13a,13b) 配線
16 電磁石コイル
17 鉄心
18 センサ固定具
20 制御盤
21(21A,21B,21C) 保持状態モニタ回路
22 電源回路
23 センサ信号処理回路
26 高周波電源
27 結合器
28 第1のフィルタ
29 交流電圧測定器
30 第2のフィルタ
31 直流電圧測定器
32 ライン
35 直流定電流電源
36 高周波電源
38 基準波形
39 観測波形
45 コントローラ
46 デジタル/アナログ(D/A)変換器
47 アナログ/デジタル(A/D)変換器
49 位相差検出器
51 センサ保持部
52 永久磁石
100 従来のセンサ保持装置
101 センサ保持部
102 センサ
104 永久磁石
105 センサプローブ
107 センサ信号処理装置
108 電磁石
109 直流定電流電源
1
3 Wall 10 (10A, 10B, 10C, 10D, 10E)
Claims (13)
前記電磁石コイルへ直流電流を供給する直流電流供給部と、
前記電磁石コイルへ高周波電流を供給する高周波電流供給部と、
前記直流電流供給部から前記電磁石コイルへ供給される直流電流に、前記高周波電流供給部から供給する高周波電流を重畳する交流成分重畳部と、
前記電磁石コイルの両端の電圧信号の交流成分を抽出して交流電圧を計測する交流電圧測定部と、
前記電磁石コイルの両端の電圧信号の直流成分を抽出して直流電圧を計測する直流電圧測定部と、を具備することを特徴とするセンサ保持装置。 A sensor holding unit that includes an electromagnetic coil that holds a sensor that is in contact with a monitoring or measurement object that is a monitoring or measurement object, and that generates a magnetic force by receiving an excitation current;
A direct current supply unit for supplying a direct current to the electromagnet coil;
A high-frequency current supply unit for supplying a high-frequency current to the electromagnet coil;
An alternating current component superimposing unit that superimposes a high frequency current supplied from the high frequency current supply unit on a direct current supplied from the direct current supply unit to the electromagnet coil;
An AC voltage measurement unit that extracts an AC component of a voltage signal at both ends of the electromagnet coil and measures an AC voltage;
A sensor holding apparatus comprising: a DC voltage measuring unit that extracts a DC component of a voltage signal at both ends of the electromagnet coil and measures a DC voltage.
前記電磁石コイルへ直流電流を供給する直流電流供給部と、
前記電磁石コイルへ高周波電流を供給する高周波電流供給部と、
前記直流電流供給部から前記電磁石コイルへ供給される直流電流に、前記高周波電流供給部から供給する高周波電流を重畳する交流成分重畳部と、
前記電磁石コイルの両端の電圧信号の交流成分と、前記高周波電流供給部の両端の電圧信号とを抽出して、抽出した前記電磁石コイルの両端の電圧信号の交流成分と前記高周波電流供給部の両端の電圧信号との位相差を計測する位相差測定部と、
前記電磁石コイルの両端の電圧信号の直流成分を抽出して直流電圧を計測する直流電圧測定部と、を具備することを特徴とするセンサ保持装置。 A sensor holding unit that includes an electromagnetic coil that holds a sensor that is in contact with a monitoring or measurement object that is a monitoring or measurement object, and that generates a magnetic force by receiving an excitation current;
A direct current supply unit for supplying a direct current to the electromagnet coil;
A high-frequency current supply unit for supplying a high-frequency current to the electromagnet coil;
An alternating current component superimposing unit that superimposes a high frequency current supplied from the high frequency current supply unit on a direct current supplied from the direct current supply unit to the electromagnet coil;
The AC component of the voltage signal at both ends of the electromagnet coil and the voltage signal at both ends of the high-frequency current supply unit are extracted, and the extracted AC component of the voltage signal at both ends of the electromagnet coil and both ends of the high-frequency current supply unit A phase difference measuring unit for measuring a phase difference with the voltage signal of
A sensor holding apparatus comprising: a DC voltage measuring unit that extracts a DC component of a voltage signal at both ends of the electromagnet coil and measures a DC voltage.
前記電磁石コイルの両端の電圧信号の交流成分のうち抽出する周波数帯域を可変制御する信号通過帯域制御部と、をさらに具備し、
前記押付け力算出処理部は、前記センサを前記監視計測対象物に押し付ける押付け力を算出するに先立って予め求められる情報であり、異なる複数の周波数における前記電磁石電圧と前記監視計測対象物との距離を示す近接距離との関係を示す第4の情報と、前記周波数制御部が可変制御する前記高周波電流の周波数の情報を取得し、取得した前記第4の情報と、前記高周波電流の周波数の情報とに基づき、前記高周波電流の周波数および前記交流電圧測定部が測定した前記電磁石電圧の交流電圧値における前記近接距離を算出することを特徴とする請求項1乃至6のいずれか1項に記載のセンサ保持装置。 A frequency control unit that variably controls the frequency of the high-frequency current supplied by the high-frequency current supply unit;
A signal pass band control unit that variably controls the frequency band to be extracted from the AC component of the voltage signal at both ends of the electromagnet coil,
The pressing force calculation processing unit is information obtained in advance prior to calculating the pressing force for pressing the sensor against the monitoring measurement object, and the distance between the electromagnet voltage at different frequencies and the monitoring measurement object The fourth information indicating the relationship with the proximity distance indicating the frequency, the information on the frequency of the high-frequency current variably controlled by the frequency control unit, the acquired fourth information, and the information on the frequency of the high-frequency current 7. The proximity distance in the AC voltage value of the electromagnet voltage measured by the frequency of the high-frequency current and the AC voltage measurement unit is calculated based on the above. Sensor holding device.
前記高周波電流を供給する手段が、前記電磁石コイルへ高周波電流を供給するステップと、
前記高周波電流を重畳する手段が、前記直流電流を供給する手段から前記電磁石コイルへ供給する直流電流に前記電磁石コイルへ高周波電流を供給するステップで前記電磁石コイルに供給される高周波電流を重畳するステップと、
前記近接距離に対して既知の関係を示す物理量を求める手段が、前記電磁石コイルの両端の電圧信号の交流成分および前記高周波電流を供給する手段の両端の電圧信号の少なくとも一方を用いて、前記センサを前記監視計測対象物に押し付ける押付け力と既知の関係にある前記監視計測対象物との距離を示す近接距離に対して既知の関係を示す物理量を求めるステップと、を備えることを特徴とするセンサ保持方法。 Means comprising an electromagnet coil that holds a sensor to be in contact with a monitoring / measuring object that is an object to be monitored or measured and generates a magnetic force upon receiving an excitation current, and supplies a DC current as the exciting current to the electromagnet coil Means for supplying a high-frequency current, means for superimposing a high-frequency current supplied from the means for supplying the high-frequency current on a direct current supplied to the electromagnet coil, and alternating current of voltage signals at both ends of the electromagnet coil Proximity indicating a distance from the monitoring measurement object having a known relationship with a pressing force for pressing the sensor against the monitoring measurement object using at least one of a component and a voltage signal at both ends of the means for supplying the high-frequency current Means for obtaining a physical quantity indicating a known relationship with respect to the distance, and extracting a DC component of a voltage signal at both ends of the electromagnetic coil, Means for calculating the pressing force using the physical quantity obtained by the means for obtaining a physical quantity indicating a known relationship with respect to the proximity distance and the known relation; and a means for calculating the pressing force. Means for controlling the pressing force so that the calculated pressing force falls within a preset range when the calculated pressing force is not within a preset range, and a sensor holding method using a sensor holding device comprising:
The means for supplying the high frequency current supplies the high frequency current to the electromagnet coil;
The means for superimposing the high-frequency current superimposes the high-frequency current supplied to the electromagnetic coil in the step of supplying the high-frequency current to the electromagnet coil from the direct current supplied from the means for supplying the direct current to the electromagnet coil. When,
The means for obtaining a physical quantity indicating a known relationship with respect to the proximity distance uses at least one of an AC component of a voltage signal at both ends of the electromagnetic coil and a voltage signal at both ends of the means for supplying the high-frequency current, and A physical quantity indicating a known relationship with respect to a proximity distance indicating a distance from the monitoring measurement object that is in a known relationship with a pressing force that presses the object to the monitoring measurement object. Retention method.
前記押付け力を算出する手段が、前記電磁石コイルの導体抵抗を算出するステップで算出された前記電磁石コイルの導体抵抗の情報と、前記センサを前記監視計測対象物に押し付ける押付け力を算出するに先立って予め求められる情報であり、前記電磁石コイルの導体抵抗と前記電磁石コイルの周囲温度との関係を示す情報とを、用いて前記電磁石コイルの周囲温度を求めるステップと、をさらに備えることを特徴とする請求項9記載のセンサ保持方法。 The means for calculating the pressing force has the DC voltage value information of the voltage signal at both ends of the electromagnet coil measured by the means for measuring the DC voltage, and the DC supplied from the means for supplying the DC current to the electromagnet coil. Calculating a conductor resistance of the electromagnetic coil using current value information; and
Prior to calculating the pressing force for pressing the sensor against the monitoring / measuring object, the means for calculating the pressing force calculates information on the conductor resistance of the electromagnetic coil calculated in the step of calculating the conductor resistance of the electromagnetic coil. And obtaining the ambient temperature of the electromagnet coil using information indicating the relationship between the conductor resistance of the electromagnet coil and the ambient temperature of the electromagnet coil. The sensor holding method according to claim 9.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011245917A JP2013102098A (en) | 2011-11-09 | 2011-11-09 | Sensor holding device and sensor holding method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011245917A JP2013102098A (en) | 2011-11-09 | 2011-11-09 | Sensor holding device and sensor holding method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2013102098A true JP2013102098A (en) | 2013-05-23 |
Family
ID=48622443
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011245917A Pending JP2013102098A (en) | 2011-11-09 | 2011-11-09 | Sensor holding device and sensor holding method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2013102098A (en) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016181919A1 (en) * | 2015-05-11 | 2016-11-17 | 株式会社荏原製作所 | Electromagnet device, electromagnet control device, electromagnet control method, and electromagnet system |
| JP2016213075A (en) * | 2015-05-11 | 2016-12-15 | 株式会社荏原製作所 | Electromagnet device |
| JP2016225382A (en) * | 2015-05-28 | 2016-12-28 | 株式会社荏原製作所 | Electromagnet controller and electromagnet control method |
| JP2017084563A (en) * | 2015-10-27 | 2017-05-18 | 株式会社荏原製作所 | Electromagnet controller and electromagnet system |
| US11244812B2 (en) | 2018-04-20 | 2022-02-08 | Ebara Corporation | Electromagnet control device and electromagnet system |
| US11346896B2 (en) | 2019-08-26 | 2022-05-31 | Ebara Corporation | Electromagnet control device and electromagnet system |
-
2011
- 2011-11-09 JP JP2011245917A patent/JP2013102098A/en active Pending
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016181919A1 (en) * | 2015-05-11 | 2016-11-17 | 株式会社荏原製作所 | Electromagnet device, electromagnet control device, electromagnet control method, and electromagnet system |
| JP2016213075A (en) * | 2015-05-11 | 2016-12-15 | 株式会社荏原製作所 | Electromagnet device |
| CN107615890A (en) * | 2015-05-11 | 2018-01-19 | 株式会社荏原制作所 | Electromagnet apparatus, electromagnet control device, electromagnet control method and electromagnet system |
| CN110213875A (en) * | 2015-05-11 | 2019-09-06 | 株式会社荏原制作所 | Electromagnet control device, electromagnet, electromagnet control method and electromagnet system |
| US11295935B2 (en) | 2015-05-11 | 2022-04-05 | Ebara Corporation | Electromagnet device, electromagnet controller, electromagnet control method, and electromagnet system |
| JP2016225382A (en) * | 2015-05-28 | 2016-12-28 | 株式会社荏原製作所 | Electromagnet controller and electromagnet control method |
| JP2017084563A (en) * | 2015-10-27 | 2017-05-18 | 株式会社荏原製作所 | Electromagnet controller and electromagnet system |
| US11244812B2 (en) | 2018-04-20 | 2022-02-08 | Ebara Corporation | Electromagnet control device and electromagnet system |
| US11346896B2 (en) | 2019-08-26 | 2022-05-31 | Ebara Corporation | Electromagnet control device and electromagnet system |
| US11662397B2 (en) | 2019-08-26 | 2023-05-30 | Ebara Corporation | Electromagnet control device and electromagnet system |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2013102098A (en) | Sensor holding device and sensor holding method | |
| TWI535304B (en) | Device and method for detecting force factor of loudspeaker | |
| US8378967B2 (en) | Wearable electrical apparatus | |
| TWI432747B (en) | Apparatus for diagnosing deterioration of insulation | |
| TWI403752B (en) | A device for measuring alternating current magnetic permeability and method of measuring the same | |
| CN103782134B (en) | Enter line amplitude estimation in differential transformer displacement sensor using Goerzel algorithm | |
| JP5984522B2 (en) | Measuring system | |
| JP2014003731A (en) | Drive unit of vibration type actuator and medical system using the same | |
| EP2768112A3 (en) | Apparatus and method for detecting foreign object in wireless power transmitting system | |
| WO2008024142A3 (en) | Industrial process device utilizing magnetic induction | |
| MX364305B (en) | Method and device for real time estimation of the applied pressure and of noisiness in a brake element, in particular a brake pad. | |
| WO2011148169A3 (en) | Magnetic vibratory screen clamping | |
| EP2063281A3 (en) | Magnetic detection coil and apparatus for magnetic field measurement | |
| CN101915637B (en) | A kind of sinusoidal gas micro pressure generator | |
| EP3563937B1 (en) | Haptic actuator controller | |
| Xu et al. | Stick-on piezoelectromagnetic AC current monitoring of circuit breaker panels | |
| CN107941898B (en) | A magneto-acoustic multiplexed wire rope defect and stress integrated detection device | |
| JP2009002681A (en) | Magnetic measuring device provided with permanent magnet which performs periodic motion and oscillating coil | |
| CN205449699U (en) | Thermoelectric coupling loading experiment device of magnetic force | |
| TW201221920A (en) | Generating a control signal based on propagated data | |
| CN108419186B (en) | electroacoustic transducer and voice coil vibration displacement control method | |
| van der Weijde et al. | Force sensing for compliant actuators using coil spring inductance | |
| JP6182695B2 (en) | Complex permeability measuring device and its measuring method and application. | |
| CN109387665A (en) | Speed detector and speed detection method | |
| JP2011226840A (en) | Method and device for measurement of magnetic characteristic |