JP2012139789A - 粗倣い制御を行うロボットの制御装置 - Google Patents
粗倣い制御を行うロボットの制御装置 Download PDFInfo
- Publication number
- JP2012139789A JP2012139789A JP2011000115A JP2011000115A JP2012139789A JP 2012139789 A JP2012139789 A JP 2012139789A JP 2011000115 A JP2011000115 A JP 2011000115A JP 2011000115 A JP2011000115 A JP 2011000115A JP 2012139789 A JP2012139789 A JP 2012139789A
- Authority
- JP
- Japan
- Prior art keywords
- rough copying
- rough
- predetermined
- copying
- movement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000003825 pressing Methods 0.000 claims description 164
- 239000000203 mixture Substances 0.000 claims description 96
- 238000010276 construction Methods 0.000 claims description 40
- 230000008859 change Effects 0.000 claims description 18
- 238000011156 evaluation Methods 0.000 claims description 18
- 239000000470 constituent Substances 0.000 claims description 10
- 230000009471 action Effects 0.000 claims description 3
- 238000001514 detection method Methods 0.000 abstract description 28
- 238000000034 method Methods 0.000 description 31
- 238000004364 calculation method Methods 0.000 description 21
- 238000010586 diagram Methods 0.000 description 20
- 239000013598 vector Substances 0.000 description 13
- 230000001133 acceleration Effects 0.000 description 12
- 238000012545 processing Methods 0.000 description 10
- 238000013459 approach Methods 0.000 description 4
- 238000005498 polishing Methods 0.000 description 4
- 210000000707 wrist Anatomy 0.000 description 3
- 238000012790 confirmation Methods 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 238000009957 hemming Methods 0.000 description 2
- 238000003754 machining Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 238000000926 separation method Methods 0.000 description 2
- 230000001174 ascending effect Effects 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000002950 deficient Effects 0.000 description 1
- 239000012636 effector Substances 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000007790 scraping Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
Images









































Landscapes
- Manipulator (AREA)
Abstract
【解決手段】ロボット制御装置14は、ツールとワークとの間に作用する力を検出する力検出手段16と、ロボット12の動作切り替えの判定及びパラメータ調整を行う動作切り替え判定・動作パラメータ調整部34と、動作切り替え判定・動作パラメータ調整部34による動作指令に基づいて、ロボット12に送る指令を演算する指令演算部36とを有する。
【選択図】図2
Description
(1)倣い加工の方法としての、加工工具を教示された軌道に沿って動かし、該軌道上に存在するバリなどを削る方法
(2)倣い加工・教示の方法としての、特許文献1のように、ワークからの反力に基づいて、ロボットとワークとの接点の法線方向を求め、押付方向及び進行方向を算出し、ワーク表面に対して一定力を加えながら倣う方法
(3)特許文献2−4に記載のような、予めワークから離れた位置、押付方向の粗教示をしておき、それに基づいて、位置制御をしながら押付方向について力制御を行い、ワーク表面に倣う方法
(1)予め教示された位置等に基づいて指定された軌道に沿って動作
(2)ツールとワークとの間に作用する力が目標値と一致するように力制御を行いながら、ワークの形状に沿ってツールを倣わせる動作
ここで(2)における力制御としては、以下のような具体的方法が考えられる。
(2a)教示軌道によって与えられる各位置における目標進行方向が、該教示軌道における進行ベクトルによって与えられており、該位置を参考として力制御を行う
(2b)教示軌道を中心にばね成分を持たせた押付制御を行いながら、該教示軌道に基づいて力制御を行う
(2c)ツールとワークとの間に作用する力、及び移動中のツール又はワークの位置に基づいて、ワークの形状を推定しながら力制御を行う
上記以外の方法であっても、ロボットを用いてツールとワークとを相対的に移動させる動作であれば、本発明の趣旨から外れないことは当業者には明らかである。
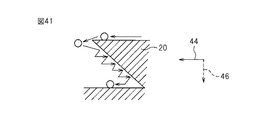
図3に示すように、ワーク20の表面に沿ってツール18を右方から左方へ移動させる場合に、ワーク20に予期せぬ凹凸形状、すなわち凸状部分40及び凹状部分42が存在するとする。この場合、凸状部分40はツールの通過動作の障害となるが、基準進行方向は、矢印44で示すように凸状部分40が存在しない(ワーク形状は破線のように平坦である)とした場合の基準進行方向(予め教示軌道等によって与えられる移動方向)を適用し、一方基準押付方向は、矢印46で示すように、基準進行方向44に垂直かつワークに向かう方向とする。
(1)ワークに対してツールを位置制御で動かし、バリ取り、研削、研磨作業等を行う場合。軌道を少しずつずらした位置制御を複数回行い、目的の作業を達成する場合もある。
(2)ワークの表面・形状状態や、ワークに存在する異物などを確認する検査等において、予め定めた範囲内でセンサ等(前記力検出手段に取り付けられた接触確認用の作業ツール等)の移動を行い、異物等の未知形状物があった場合に該未知形状になるべく沿ってセンサ等を動かしたい場合。
(3)ロボットの手先部を動かしているときに意図しない障害物があった場合、なるべく該障害物の形状に沿って該手先部を動かしたい場合。
先ず図9に示すように、矢印72で示す粗倣い構成動作1の実行中に、予め定めた閾値を超える力を検出せず、かつ、予め定めた移動時間が経過し又は予め定めた移動距離だけ移動したら、動作を矢印74で示す粗倣い構成動作2に切り替える。
(1)基準押付方向46と逆方向(図22では上向)に最も進んだ位置と比較するときの判定距離を大きくする。
(2)粗倣い構成動作1及び粗倣い構成動作2の移動時間又は移動距離を大きくする。
(3)移動中の位置をもとに、ツールの停滞状況が解消されるように粗倣い構成動作1又は粗倣い構成動作2の移動方向を変える。
(1)矢印74で示す粗倣い構成動作2に切り替え、ツールを基準進行方向と逆方向に移動させる。
(2)又は、ワークからの反力の大きさ、方向に基づき、基準進行方向とは逆方向の成分を持つ方向にツールを移動させる粗倣い構成動作1を行う。移動方向を変えた粗倣い構成動作1によって、ツールがワークと接触し、基準進行方向と逆方向について閾値を超える力が検出されたら、粗倣い構成動作1の移動方向を基準進行方向の成分を含む方向に変更し、移動時間又は移動距離を小さくする。
(1)ツールが全く予期せぬワーク形状にずっと倣い続けてしまっている。
(2)ツールがある部分に嵌り込んでしまっている。すなわち、移動方向や移動量等を変えても、その位置から動くことができない。
(3)動作パラメータが不適切であり、ある部分をツールが適切に回避して動くことができない。
(1)粗倣い構成動作1又は粗倣い構成動作2を、ある回数以上繰り返している。
(2)粗倣い動作の実行時間が、所定時間を超えている。
(3)粗倣い動作の移動位置が、想定される位置から離れすぎている。
(4)基本移動動作から粗倣い動作へ切り替えたときの位置から現在のツールの位置までの距離又は総移動距離が、所定距離を超えている。
(5)基本移動動作が教示軌道に基づく動作である場合に、ツールが、教示軌道からの最短距離が閾値以上の位置にいる。
上記のような状況が検出又は確認されたら、ツールが「意図しない方向に移動し続けている」と判断し、安全のため、ロボットの動作を止めることが好ましい。これにより、粗倣い動作によって想定外の動作をした場合の危険な状況を回避できる。
(1)粗倣い動作時には、粗倣い構成動作1及び粗倣い構成動作2の実行中に力検出手段によってツールとワークとの接触を検出したときのツールの位置や、粗倣い構成動作2の最終位置を位置データとして使用する。
(2)連続する位置データにおける位置間の距離が予め定めた閾値以下であるような、互いに近い位置が存在する場合には、それらを軌道生成のためのデータとして用いず、適当な代表点のみを使用する。
(3)例えば図27に示すように、位置データとして使用する点の位置の変化を見たとき、ある点までとそれ以降の部分とで急にツールの移動方向が変わる部分は角部であると推定し、位置データとして適当な補間点78、80を入れ、その位置データをもとに軌道を生成する。
(4)最小自乗近似等により、軌道生成に用いる位置データに沿った滑らかな軌道を生成する。
(5)教示データをもとに位置の補間等を行いながら滑らかに動くように移動するとき、実際に通過する位置と、教示データによって与えられる位置とが、角部やコーナ部などにおいてずれることがある場合、それを考慮し、位置データの位置と実際に通過する位置とのずれが所定閾値以下になるように、位置データを補正し、教示データを生成する。
(6)教示データ上の移動速度はユーザが設定した値を用いる。又は、作業の目的や条件に応じて、予め用意したデータテーブルを参照して、適切な移動速度を設定する。さらに、移動速度によって、実際に通過する位置と、教示データによって与えられる位置とがずれることがある場合、そのずれが所定閾値以下になるように、前記のように与えられる速度をもとに、位置に応じて調整した移動速度を設定してもよい。
(7)教示データ作成時に押付方向も設定する場合には、生成される軌道をもとにその進行方向と直交する方向を押付方向とする。
以上のようにすれば、粗倣い動作実行中の位置を、粗倣い構成動作1及び粗倣い構成動作2の動作の特徴を考慮しながら、或いは又はこれに加え、基本移動動作実行中の位置を、ロボット制御装置の制御周期毎に取得し、その位置をもとに、動作中の速度には関係なく、また教示データには不要な動作中の位置は除き、適当な間隔で位置データを生成することができ、故にワーク形状に沿った軌道を移動させる教示データを生成又は修正することができる。
(1)粗倣い動作中の移動位置に基づいて求められる、ワーク形状及びツールの現在位置に基づき、粗倣い構成動作2の移動距離、移動時間及び移動速度を調整する。例えば、粗倣い構成動作2の実行前の、粗倣い構成動作1の開始位置から、基準進行方向について所定距離だけ先に進ませるように、パラメータを定める。
(2)実験に基づいて、使用するワーク形状に適した移動時間又は移動距離を定め、その値を限度としてツールを動かす。
(3)粗倣い動作中に調整された、移動時間又は移動距離を限度としてツールを動かす。
12 ロボット
14 ロボット制御装置
16 力センサ
18 作業ツール
20 ワーク
22 作業台
24 各軸位置検出部
26 位置、速度、加速度検出・算出部
28 作用力算出部
30 第1のパラメータ格納部
32 第2のパラメータ格納部
34 動作切り替え判定・動作パラメータ調整部
36 指令演算部
38 基準進行方向、基準押付方向算出・更新部
Claims (13)
- 作業ツールとワークの一方に対して他方をロボットの手先部によって相対的に動かし、両者間に作用する力を制御するロボット制御装置において、
前記両者間に作用する力を検出する力検出手段と、
所定の基準進行方向と基準押付方向とに基づいて実行され、所定の方向に、所定移動時間又は所定移動距離を限度に移動する第1の粗倣い構成動作及び前記所定方向とは異なる方向に、所定移動時間又は所定移動距離を限度に移動する第2の粗倣い構成動作からなる粗倣い動作を実行する粗倣い動作実行手段と、
前記ロボットの手先部を移動させる基本移動動作の実行中に検出された、前記両者間に作用する力における、所定方向の成分の評価結果、又は前記ロボットが動かしている前記作業ツール若しくはワークの位置の評価結果に基づいて基本移動動作から粗倣い動作に切り替える第1の動作切り替え手段と、
粗倣い動作実行中の動作切り替え判定において、粗倣い動作中に検出された、前記両者間に作用する力の評価結果又は前記ロボットが動かしている前記作業ツール若しくはワークの位置の評価結果に基づいて、粗倣い動作から基本移動動作への切り替え、第1の粗倣い構成動作から第2の粗倣い構成動作への切り替え、第1の粗倣い構成動作から別の第1の粗倣い構成動作への切り替え、第2の粗倣い構成動作から第1の粗倣い構成動作への切り替え、及び、第2の粗倣い構成動作から別の第2の粗倣い構成動作への切り替えのいずれかを実行する、第2の動作切り替え手段と、
を備えたことを特徴とするロボット制御装置。 - 前記基本移動動作は、前記両者間に作用する力が目標値と一致するように、前記一方に前記他方を接触し続けながら移動させる倣い動作であり、
前記第1の動作切り替え手段は、前記両者間に作用する力における、前記ロボットの手先部の進行方向の成分と、予め定めた第1の閾値との比較結果又は前記ロボットが動かしている前記作業ツール若しくはワークの位置の評価結果に応じて、基本移動動作から粗倣い動作に切り替えるものであり、
前記第2の動作切り替え手段は、粗倣い動作実行中の動作切り替え判定において、第2の粗倣い構成動作の移動方向は、基準進行方向と同じ方向の成分を含む方向であり、
第2の粗倣い構成動作の実行中に、前記両者間に作用する力と予め定めた第2の閾値との比較結果に応じて第1の粗倣い構成動作又は基本移動動作に切り替え、第2の粗倣い構成動作の最後まで、第1の粗倣い構成動作への前記切り替えを行わないとき、粗倣い動作から基本移動動作に切り替えるものであることを特徴とする、請求項1のロボット制御装置。 - 前記第1の動作切り替え手段は、前記両者間に作用する力における、前記ロボットの手先部の進行方向の成分と、予め定めた第1の閾値との比較結果又は前記ロボットが動かしている前記作業ツール若しくはワークの位置の評価結果に応じて、基本移動動作から粗倣い動作に切り替えるものであり、
粗倣い動作において、第2の粗倣い構成動作の移動方向は、基準進行方向と同じ方向の成分を含む方向とし、
前記第2の動作切り替え手段が、第2の粗倣い構成動作の実行中に、前記両者間に作用する力と予め定めた第2の閾値との比較結果に応じて第1の粗倣い構成動作に切り替える動作を、第1の粗倣いパターン動作とし、
粗倣い動作において、
第2の粗倣い構成動作の移動方向は、基準押付方向と同じ方向の成分を含む方向とし、又は、基本移動動作が教示軌道に基づいて移動する場合、前記教示軌道に近付く方向とし、
前記第2の動作切り替え手段が、前記ツールまたはワークの位置と、前記指定された軌道の距離の評価結果に基づいて、粗倣い動作から基本移動動作に切り替える動作を粗倣い軌道復帰動作とし、
前記第2の動作切り替え手段は、粗倣い動作実行中の動作切り替え判定において、第1の粗倣いパターン動作の実行中に、第2の粗倣い構成動作の最後まで、第1の粗倣い構成動作への動作切り替えを行わないとき、粗倣い軌道復帰動作に切り替え、
粗倣い軌道復帰動作の実行中に、基準進行方向成分の力の大きさが予め定めた第3の閾値以上である場合、第1の粗倣いパターン動作に切り替えることを特徴とする、請求項1のロボット制御装置。 - 前記基本移動動作は、該両者間に作用する力が目標値と一致するように、前記一方に前記他方を接触し続けながら移動させる倣い動作であり、
前記第1の動作切り替え手段は、前記両者間に作用する力における、前記ロボットの手先部の進行方向の成分と、予め定めた第4の閾値との所定比較時間又は所定比較回数の比較結果、及び、前記両者間に作用する力における、前記ロボットの手先部の押付方向の成分と、予め定めた第5の閾値との所定比較時間又は所定比較回数の比較結果又は前記ロボットが動かしている前記作業ツール又はワークの位置の評価結果に応じて、基本移動動作から粗倣い動作に切り替えるものであり、
前記第2の動作切り替え手段は、粗倣い動作実行中の動作切り替え判定において、
第2の粗倣い構成動作の移動方向は、基準進行方向と逆方向の成分を含む方向であり、
粗倣い動作実行中に、前記両者間に作用する力における、所定方向の成分と、予め定めた第6の閾値との比較結果又は前記ロボットが動かしている前記作業ツール若しくはワークの位置の評価結果に応じて、粗倣い動作から基本移動動作に切り替えるものであることを特徴とする、請求項1のロボット制御装置。 - 前記第2の動作切り替え手段は、
前記動作切り替え判定において、第1の粗倣い構成動作の実行時に、前記両者間に作用する力が、予め定めた第7の閾値を超えたとき、第1の粗倣い構成動作の移動する向きを、検出される力の大きさ及び方向に基づいて変更し、別の第1の粗倣い構成動作を行い、
別の第1の粗倣い構成動作の実行時に、該別の第1の粗倣い構成動作が完了するまで、所定の条件を満たさないとき、第2の粗倣い構成動作に切り替えることを特徴とする、請求項1、2又は3のロボット制御装置。 - 前記第2の動作切り替え手段は、
第1の粗倣い構成動作の実行後に、別の第1の粗倣い構成動作を行う場合において、
別の第1の粗倣い構成動作で所定移動時間又は所定移動距離、移動したときの位置が、
基準押付方向と逆方向の位置について、
一連の第1の粗倣い構成動作における開始時からそれまでで、前記基準押付方向と逆方向に最も進んだ位置から所定距離以下なら、移動方向を基準押付方向の逆方向の成分を含む方向にし、又は基準進行方向の逆方向の成分を含む方向にし、別の第1の粗倣い構成動作を行うように動作を切り替えることを特徴とする、請求項1、2、3又は5のロボット制御装置。 - 前記第2の動作切り替え手段は、前記動作切り替え判定において、
第1の粗倣い構成動作の実行時に、前記両者間に作用する力における、基準押付方向の成分が、予め定めた第8の閾値以上である場合、粗倣い動作から基本移動動作に切り替え、前記両者間に作用する力における、基準押付方向の成分が、前記第8の閾値以上でなく、かつ、前記両者間に作用する力における、基準進行方向の成分が、予め定めた第9の閾値以上である場合、第2の粗倣い構成動作、又は別の第1の粗倣い構成動作、又は基本移動動作に切り替え、
前記両者間に作用する力における、基準押付方向の成分が前記第8の閾値以上でなく、かつ、前記両者間に作用する力における、基準進行方向の成分が、前記第9の閾値以上でなく、かつ、前記作業ツールと前記ワークとの間に作用する力が予め定めた第10の閾値以上である場合、
第1の粗倣い構成動作の移動する向きを、検出される力の大きさ及び方向に基づいて変更し、別の第1の粗倣い構成動作を行うように動作を切り替え、
別の第1の粗倣い構成動作の実行時に、該別の第1の粗倣い構成動作が完了するまで、所定の条件を満たさなければ、第2の粗倣い構成動作に切り替えることを特徴とする、請求項1又は4のロボット制御装置。 - 前記第2の動作切り替え手段は、前記動作切り替え判定において、
第2の粗倣い構成動作の実行時に、前記両者間に作用する力における、基準押付方向の成分が、予め定めた第11の閾値以上である場合、粗倣い動作から基本移動動作に切り替え、
前記両者間に作用する力における、基準押付方向の成分が、前記第11の閾値未満、かつ、前記両者間に作用する力が、予め定めた第12の閾値以上であるとき、第1の粗倣い構成動作に切り替え、
第2の粗倣い構成動作の実行時に、該第2の粗倣い構成動作が完了するまで、所定の条件を満たさないとき、第1の粗倣い構成動作に切り替えることを特徴とする、請求項1、4又は7のロボット制御装置。 - 前記第2の動作切り替え手段は、第2の粗倣い構成動作の実行時に、前記所定移動時間又は前記所定移動距離だけ移動しても、前記両者に作用する力が、予め定めた第13の閾値未満である場合、第2の粗倣い構成動作の所定移動時間、所定移動速度及び所定距離のうち少なくとも1つを大きくするか、又は、
前記移動方向を基準進行方向の逆方向に所定量だけずらす、動作調整手段を含むことを特徴とする、請求項1、4、7又は8のロボット制御装置。 - 前記第2の動作切り替え手段は、粗倣い動作実行時に、
第1の粗倣い構成動作若しくは第2の粗倣い構成動作を所定回数以上繰り返し実行しても、又は、所定時間が経過するまで繰り返し実行しても、第1の粗倣い構成動作の開始位置、又は第2の粗倣い構成動作の開始位置の少なくとも2つ以上のそれぞれの開始位置に基づく開始位置の変化量が所定値以下のとき、
第1の粗倣い構成動作又は第2の粗倣い構成動作を行うときの、移動方向を変えるか、又は、第1の粗倣い構成動作の所定移動時間、所定移動速度及び所定移動距離、並びに第2の粗倣い構成動作の所定移動時間、所定移動速度及び所定移動距離のうち少なくとも1つを大きくする動作調整手段を含むことを特徴とする、請求項1〜9の内、何れか1項のロボット制御装置。 - 前記第2の動作切り替え手段は、
前記粗倣い動作実行時に、
第1の粗倣い構成動作若しくは第2の粗倣い構成動作を所定回数以上繰り返した場合若しくは所定時間経過した場合、粗倣い動作への切り替え時の開始位置からの距離が予め定めた第14の閾値以上の場合、又は、基本移動動作が教示軌道に基づく場合かつ教示軌道からの最短距離が前記第14の閾値以上の場合、
前記ロボットの手先部の動作を止めることを特徴とする、請求項1〜10の内、何れか1項のロボット制御装置。 - 前記第2の動作切り替え手段は、
粗倣い動作実行時の、第1の粗倣い構成動作又は第2の粗倣い構成動作の実行時に、
前記両者間に作用する力が、予め定めた第15の閾値以上である場合、
第1の粗倣い構成動作又は第2の粗倣い構成動作における所定移動速度を、そのときの所定移動速度より小さくする動作調整手段を含むことを特徴とする、請求項1〜11の内、何れか1項のロボット制御装置。 - 粗倣い実行中又は基本移動動作の実行中に取得した位置データをもとに、所定の速度指令で動かす教示データを生成する教示データ生成手段を備えることを特徴とする、請求項1〜12の内、何れか1項のロボット制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011000115A JP5666920B2 (ja) | 2011-01-04 | 2011-01-04 | 粗倣い制御を行うロボットの制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011000115A JP5666920B2 (ja) | 2011-01-04 | 2011-01-04 | 粗倣い制御を行うロボットの制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012139789A true JP2012139789A (ja) | 2012-07-26 |
| JP5666920B2 JP5666920B2 (ja) | 2015-02-12 |
Family
ID=46676604
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011000115A Active JP5666920B2 (ja) | 2011-01-04 | 2011-01-04 | 粗倣い制御を行うロボットの制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5666920B2 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018123251A1 (ja) | 2016-12-28 | 2018-07-05 | 株式会社Subaru | 機械加工用ロボット及び機械加工方法 |
| WO2018235429A1 (ja) | 2017-06-22 | 2018-12-27 | 株式会社Subaru | 機械加工装置用のアタッチメント |
| WO2021230135A1 (ja) * | 2020-05-11 | 2021-11-18 | ファナック株式会社 | プログラム生成装置およびプログラム生成方法 |
| US11440110B2 (en) | 2015-07-09 | 2022-09-13 | Subaru Corporation | Machining apparatus and machining method |
| JP2023036253A (ja) * | 2021-09-02 | 2023-03-14 | トライエンジニアリング株式会社 | ロボット装置 |
| WO2024116221A1 (ja) * | 2022-11-28 | 2024-06-06 | ファナック株式会社 | 数値制御装置及び数値制御システム |
| WO2024116223A1 (ja) * | 2022-11-28 | 2024-06-06 | ファナック株式会社 | ロボット制御装置 |
Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03111151A (ja) * | 1989-09-20 | 1991-05-10 | Hitachi Constr Mach Co Ltd | ワークコーナー部の倣い制御装置 |
| JPH03184786A (ja) * | 1989-12-14 | 1991-08-12 | Fujitsu Ltd | ロボットの軌道生成方式 |
| JPH0435860A (ja) * | 1990-05-29 | 1992-02-06 | Hitachi Constr Mach Co Ltd | 研削装置 |
| JPH0588742A (ja) * | 1991-09-27 | 1993-04-09 | Hitachi Metals Ltd | ロボツトの自動教示法 |
| JPH0592808U (ja) * | 1992-05-07 | 1993-12-17 | 株式会社明電舎 | グラインダ研削ロボットの制御装置 |
| JPH06102924A (ja) * | 1992-09-18 | 1994-04-15 | Hitachi Metals Ltd | ロボットの教示点自動較正法 |
| JPH06138930A (ja) * | 1992-10-30 | 1994-05-20 | Nippon Telegr & Teleph Corp <Ntt> | 加工・組立装置の倣い制御方法および倣い制御装置 |
| JPH06262562A (ja) * | 1993-03-16 | 1994-09-20 | Hitachi Metals Ltd | 加工ロボットの動作教示方法 |
| JPH07132441A (ja) * | 1993-11-05 | 1995-05-23 | Nippon Telegr & Teleph Corp <Ntt> | 加工・組立装置における接触点及び接触法線検出算定方法 |
| JPH07136958A (ja) * | 1993-11-11 | 1995-05-30 | Nippon Telegr & Teleph Corp <Ntt> | ロボット制御装置 |
| JPH07266269A (ja) * | 1994-03-25 | 1995-10-17 | Hitachi Metals Ltd | ロボットの力制御による加工方法 |
| JPH07319547A (ja) * | 1994-05-20 | 1995-12-08 | Fanuc Ltd | ロボットの倣い制御方法 |
| JPH08118276A (ja) * | 1994-10-21 | 1996-05-14 | Toshiba Mach Co Ltd | 力制御ロボット |
-
2011
- 2011-01-04 JP JP2011000115A patent/JP5666920B2/ja active Active
Patent Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03111151A (ja) * | 1989-09-20 | 1991-05-10 | Hitachi Constr Mach Co Ltd | ワークコーナー部の倣い制御装置 |
| JPH03184786A (ja) * | 1989-12-14 | 1991-08-12 | Fujitsu Ltd | ロボットの軌道生成方式 |
| JPH0435860A (ja) * | 1990-05-29 | 1992-02-06 | Hitachi Constr Mach Co Ltd | 研削装置 |
| JPH0588742A (ja) * | 1991-09-27 | 1993-04-09 | Hitachi Metals Ltd | ロボツトの自動教示法 |
| JPH0592808U (ja) * | 1992-05-07 | 1993-12-17 | 株式会社明電舎 | グラインダ研削ロボットの制御装置 |
| JPH06102924A (ja) * | 1992-09-18 | 1994-04-15 | Hitachi Metals Ltd | ロボットの教示点自動較正法 |
| JPH06138930A (ja) * | 1992-10-30 | 1994-05-20 | Nippon Telegr & Teleph Corp <Ntt> | 加工・組立装置の倣い制御方法および倣い制御装置 |
| JPH06262562A (ja) * | 1993-03-16 | 1994-09-20 | Hitachi Metals Ltd | 加工ロボットの動作教示方法 |
| JPH07132441A (ja) * | 1993-11-05 | 1995-05-23 | Nippon Telegr & Teleph Corp <Ntt> | 加工・組立装置における接触点及び接触法線検出算定方法 |
| JPH07136958A (ja) * | 1993-11-11 | 1995-05-30 | Nippon Telegr & Teleph Corp <Ntt> | ロボット制御装置 |
| JPH07266269A (ja) * | 1994-03-25 | 1995-10-17 | Hitachi Metals Ltd | ロボットの力制御による加工方法 |
| JPH07319547A (ja) * | 1994-05-20 | 1995-12-08 | Fanuc Ltd | ロボットの倣い制御方法 |
| JPH08118276A (ja) * | 1994-10-21 | 1996-05-14 | Toshiba Mach Co Ltd | 力制御ロボット |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11440110B2 (en) | 2015-07-09 | 2022-09-13 | Subaru Corporation | Machining apparatus and machining method |
| US11338446B2 (en) | 2016-12-28 | 2022-05-24 | Subaru Corporation | Machining robot and machining method |
| WO2018123251A1 (ja) | 2016-12-28 | 2018-07-05 | 株式会社Subaru | 機械加工用ロボット及び機械加工方法 |
| WO2018235429A1 (ja) | 2017-06-22 | 2018-12-27 | 株式会社Subaru | 機械加工装置用のアタッチメント |
| US11992909B2 (en) | 2017-06-22 | 2024-05-28 | Subaru Corporation | Attachment for machining apparatus |
| JP7556951B2 (ja) | 2020-05-11 | 2024-09-26 | ファナック株式会社 | プログラム生成装置およびプログラム生成方法 |
| WO2021230135A1 (ja) * | 2020-05-11 | 2021-11-18 | ファナック株式会社 | プログラム生成装置およびプログラム生成方法 |
| JPWO2021230135A1 (ja) * | 2020-05-11 | 2021-11-18 | ||
| US12447616B2 (en) | 2020-05-11 | 2025-10-21 | Fanuc Corporation | Program generation device and program generation method generating a route program for that returns tip of robot from end point by a prescribed distance |
| JP2023036253A (ja) * | 2021-09-02 | 2023-03-14 | トライエンジニアリング株式会社 | ロボット装置 |
| JP7681228B2 (ja) | 2021-09-02 | 2025-05-22 | トライエンジニアリング株式会社 | ロボット装置 |
| WO2024116223A1 (ja) * | 2022-11-28 | 2024-06-06 | ファナック株式会社 | ロボット制御装置 |
| WO2024116221A1 (ja) * | 2022-11-28 | 2024-06-06 | ファナック株式会社 | 数値制御装置及び数値制御システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5666920B2 (ja) | 2015-02-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5666920B2 (ja) | 粗倣い制御を行うロボットの制御装置 | |
| JP5236596B2 (ja) | 加工ロボットシステム | |
| CN100561491C (zh) | 自动路径学习的方法和设备 | |
| JP4267027B2 (ja) | ロボット制御装置 | |
| JP4736607B2 (ja) | ロボット制御装置 | |
| US9701014B2 (en) | Robot control device for preventing misjudgment by collision judging part | |
| JP6472214B2 (ja) | ロボット装置の制御方法及びロボット装置 | |
| JP6484265B2 (ja) | 学習制御機能を備えたロボットシステム及び学習制御方法 | |
| US20150045954A1 (en) | Robot apparatus and robot controlling method | |
| Rymansaib et al. | Exponential trajectory generation for point to point motions | |
| WO2008004487A1 (en) | Apparatus and method for controlling robot arm, robot, and robot arm control program | |
| JP7459530B2 (ja) | 教示方法およびロボットシステム | |
| US12397428B2 (en) | Robot system and method of controlling the robot system | |
| CN107850884A (zh) | 用于非生产时间运动的轨迹确定方法 | |
| JP7169561B2 (ja) | ロボットシステム、ロボットの制御方法、サーボシステム | |
| JP7808107B2 (ja) | ロボットおよびアームの制御方法 | |
| CN113858189B (zh) | 机器人的控制方法及机器人系统 | |
| JP6088601B2 (ja) | 走行軸付きロボットにおけるツール先端の振れを抑制するロボット制御装置 | |
| JP6321605B2 (ja) | 曲率と曲率変化量による速度制御を行う数値制御装置 | |
| JP3911258B2 (ja) | 制御装置による駆動装置の制御方法および制御装置 | |
| JP2010012544A (ja) | ロボットの制御方法及びロボット制御装置 | |
| JP4668251B2 (ja) | ロボットシステムの制御装置、制御方法およびそのプログラム | |
| JP6476635B2 (ja) | ロボットの制御装置及び制御方法 | |
| KR20220159761A (ko) | 충돌감지 기능을 갖는 협동로봇 및 협동로봇의 충돌감지 방법 | |
| JP7572452B2 (ja) | 生産システム及び制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131024 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140729 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140926 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141118 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141211 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5666920 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |