【0001】
【発明の属する技術分野】
本発明は、GPS(Global Positioning System)などを利用した衛星航法と速度センサや方位センサ等を利用した慣性航法を併用して移動体の位置、移動方位、移動距離の検出を、精度良く算出するためのデータ検定装置およびその方法に関する。
【0002】
【従来の技術】
現在、GPSと慣性航法を併用した測位方法は、自動車、船舶、航空機などの移動体の位置検出に広く用いられている。GPSでは、複数の人工衛星の位置とそれぞれの人工衛星が送信する信号が受信機に届くまでの伝播時間を算出することにより、3点測量の原理を用いて受信機の位置を特定することが可能である。また、トンネルや高層建造物等のように、GPS受信機と衛星の間に障害物が存在して、規定個数のGPS衛星を受信できない状況では、GPSにより測位した位置からの移動量
を移動体に搭載した速度センサやジャイロセンサなどを利用して、基準位置からの相対移動量を算出する慣性航法を利用して移動体の位置を特定する方法が用いられている。
【0003】
GPSによる位置測位精度は、受信する衛星の配置状況や衛星が送信する信号が電離層や大気を通過する際に生じる遅延等によって推定することが可能である。しかしながら、GPS信号の伝播経路の途中で高層建造物等によって反射が生じた場合(以降マルチパスと呼ぶ)には、衛星から受信機までの伝播時間に遅延が生じるため、受信機が算出する位置に大きな誤差が生じることがある。例えば、GPSとジャイロセンサおよび車速センサを利用して車両の位置を検出するカーナビゲーション装置においては、GPSデータを車両の絶対位置検出、角速度センサの零点検出やスケールファクタの補正、車速係数の算出等に利用している。このようなカーナビゲーション装置において、GPSデータがマルチパスによる影響を受けた場合には、車両の位置だけでなくセンサの内部補正係数にも大きな誤差が生じることになり、測位精度が大幅に悪化する可能性が高い。このGPSの異常データの影響を除去するため、位置算出やセンサ補正の前処理としてGPSデータの検定を行う手法が一般的に用いられている。
【0004】
従来のGPSデータ検定方法は、例えば、特開平5−19036号公報に開示されているように、GPS受信機が出力するデータのPDOP値が一定値以下で、速度データが一定値以上で、かつGPS受信機が出力する速度データと速度センサの車速パルス等から得られる速度の差が一定値以下の場合に限り、GPSデータを出力している。あるいは、上記の3種の条件に付け加えて、GPS受信機からのデータが所定時間内に3回連続して得られており、かつ3回連続したGPS受信機からの方位データが所定値内という条件が満たされた時にGPSデータを出力するような構成としている。
【0005】
また、特開平6−66916号公報に開示されているGPS受信機では、GPS受信機で計算して得られた速度が移動体の速度の限界値を越える場合に、前回計算して得られている位置、速度、方位、加速度を表示するような構成としている。
【0006】
また、特開平8−43515号公報に開示されているGPS受信装置では、ドップラーシフト周波数の時間的な変動量が所定の値を越える場合に、GPSデータを測位演算に用いないようにする構成としている。
【0007】
また、特開平11−83979号公報に開示されているナビゲーション装置では、GPS衛星から受信した衛星電波のドップラーシフト周波数から求めた車両の速度と、速度センサの車速パルス等から求めた車両の速度の差が予め設定された基準値を越える場合に、マルチパスによる誤差が発生したことを判定し、測位演算に用いる受信衛星の組み合せを変更して、高精度の測位を可能としている。
【0008】
【発明が解決しようとする課題】
しかしながら、従来のGPSデータ検定方法は、GPS測位手段の算出結果と速度センサの車速パルス等から得られる速度の差を基準値と比較する際に、予め基準値を設定しておく必要がある。例えば、特開平5−19036号公報記載のGPSデータ検定方法は、走行速度、PDOP値、GPS受信機が出力する速度データと車速パルスなどの速度センサとの出力の差、の3つについて、移動体やセンサの特性に合わせて、予め適切な基準値を選択しておかなければならないという問題があった。また、所定回数連続したGPSデータが必要であるため、建造物や高架道路下等のように障害物があってGPS信号が受信し難い場所や、GPS受信機の電源を投入した直後では、GPSデータの検定を行うことができないという問題があった。
【0009】
また、特開平6−66916号公報記載のGPS受信機および特開平8−43515号公報記載のGPS受信装置においては、基準値をそれぞれ移動体の速度限界あるいは加速度の限界に基づいて上限値を設定した場合、移動体の速度あるいは加速度が上限値と比較して極めて低い状態では、許容される誤差の範囲が大きくなるため、GPSデータを異常と判定する精度が悪化するという問題があった。具体例としては、移動体の速度上限を100km/hとする場合、移動速度が10km/hの時には90km/hまでの速度誤差が許容されることになる。
【0010】
また、特開平8−43515号公報記載のGPS受信装置では、ある時刻のGPSデータを基準にして変動量を用いて異常判定が行われた場合に、実際には、基準とするGPSデータもしくは判定対象とするGPSデータのどちらが異常データであるのか判定することができないという問題があった。
【0011】
また、特開平11−83979号公報記載のナビゲーション装置では、GPS衛星から受信した衛星電波のドップラーシフト周波数から求めた車両の速度と、車速パルス等の速度センサから求めた車両の速度との差のみを用いてGPSデータの検定を行うため、それぞれの速度の大きさに差が生じていない場合であっても、実際に移動している方位とGPSドップラーシフト周波数から求めた方位が大きく異なる場合は、GPSデータの異常を検出できないという問題があった。
【0012】
本発明は、こうした従来の問題点を解決するものであり、GPS等の衛星データの異常を判定するための基準値を予め設定しておく必要がなく、かつ連続して衛星データが取得できない場所でも異常データを判定可能であり、また移動体の移動速度、加速度の上限値に関係なく異常データを検定することができるデータ検定装置およびその方法を提供することを目的とする。また、本発明は、衛星から受信した衛星電波のドップラーシフト周波数から求めた車両の速度と、センサから求めた車両の速度との差が少ない場合においても、衛星データの検定が可能なデータ検定装置およびその方法を提供することを目的とする。
【0013】
【課題を解決するための手段】
上記課題を解決するために、本発明のデータ検定装置は、人工衛星が送信する航法信号を受信検波する航法信号受信手段と、前記航法信号受信手段が前記航法信号を受信する時のドップラーシフト周波数から前記人工衛星に対する移動体の速度を検出する衛星移動体速度検出手段と、前記衛星移動体速度検出手段が検出した衛星移動体速度の誤差を推定する衛星移動体速度誤差推定手段と、前記移動体の移動速度を前記移動体に搭載したセンサにより検出する移動体移動速度検出手段と、前記移動体移動速度検出手段が検出した移動体移動速度に含まれる誤差を推定する移動体移動速度誤差推定手段と、前記衛星移動体速度検出手段が検出した衛星移動体速度と前記移動体移動速度検出手段が検出した移動体移動速度との差が、前記衛星移動体速度誤差推定手段が推定した衛星移動体速度誤差と前記移動体移動速度誤差推定手段が推定した移動体移動速度誤差との和よりも大きいどうかを判定する速度判定手段とを備えたことを特徴とする。この構成により、検出した衛星移動体速度と移動体移動速度との差が、推定した衛星移動体速度誤差と移動体移動速度誤差との和よりも大きい場合に、衛星データを無効と判定するので、衛星データの異常を判定するための基準値を予め設定することなしに、衛星データの検定を行うことができる。また、衛星信号を所定回数連続して受信する必要がないため、衛星信号の連続受信が困難な場所であっても、衛星データの検定を行うことができる。
【0014】
また、本発明のデータ検定装置は、人工衛星が送信する航法信号を受信検波する航法信号受信手段と、前記航法信号受信手段が前記航法信号を受信する時のドップラーシフト周波数から前記人工衛星に対する移動体の方位を検出する衛星移動体方位検出手段と、前記衛星移動体方位検出手段が検出した衛星移動体方位の誤差を推定する衛星移動体方位誤差推定手段と、前記移動体の一定時間の間の方位変化量を前記移動体に搭載したセンサにより検出する移動体相対方位検出手段と、前記移動体相対方位検出手段が検出した一定時間の間の方位変化量に含まれる誤差を推定する移動体相対方位誤差推定手段と、前記衛星移動体方位検出手段が検出した一定時間の間の移動体方位の差分と前記移動体相対方位検出手段が検出した一定時間の間の方位変化量の差分との差が、前記衛星移動体方位誤差推定手段が推定した移動体方位誤差と前記移動体相対方位誤差推定手段が推定した移動体相対方位誤差との和よりも大きいどうかを判定する方位変化量判定手段とを備えたことを特徴とする。この構成により、検出した一定時間の間の移動体方位の差分と方位変化量の差分との差が、推定した移動体方位誤差と移動体相対方位誤差との和よりも大きい場合に、衛星データを無効と判定するので、衛星データの異常を判定するための基準値を予め設定することなしに、衛星データの検定を行うことができる。また、衛星信号を所定回数連続して受信する必要がないため、衛星信号の連続受信が困難な場所であっても、衛星データの検定を行うことができる。さらに、衛星信号に基づく移動体速度とセンサに基づく移動体速度の差が、移動体の移動速度が小さいために許容範囲内である場合でも、移動体の方位変化量の大きさを比較することにより、衛星データの検定を実現することができる。
【0015】
また、本発明のデータ検定装置は、人工衛星が送信する航法信号を受信検波する航法信号受信手段と、前記航法信号受信手段が受信した航法信号と前記航法信号の伝播時間とを用いて移動体の絶対位置を検出する移動体絶対位置検出手段と、前記移動体絶対位置検出手段が検出した絶対位置の誤差を推定する移動体絶対位置誤差推定手段と、前記移動体の一定時間の間の移動量を前記移動体に搭載したセンサにより検出する移動体相対変位検出手段と、前記移動体相対変位検出手段が検出した移動体移動量の誤差を推定する移動体相対変位誤差推定手段と、前記移動体絶対位置検出手段が検出した一定時間の間の絶対位置間の距離と前記移動体相対変位検出手段が検出した一定時間の間の移動体移動量との差が、前記移動体絶対位置誤差推定手段が推定した絶対位置誤差と前記移動体相対変位誤差推定手段が推定した移動体相対変位誤差との和よりも大きいどうかを判定する変位量判定手段とを備えたことを特徴とする。この構成により、検出した一定時間の間の絶対位置間の距離と移動体移動量との差が、推定した絶対位置誤差と移動体相対変位誤差との和よりも大きい場合に、衛星データを無効と判定するので、衛星データの異常を判定するための基準値を予め設定することなしに、衛星データの検定を行うことができる。また、衛星信号を所定回数連続して受信する必要がないため、衛星信号の連続受信が困難な場所であっても、衛星データの検定を行うことができる。さらに、衛星信号に基づく移動体速度とセンサに基づく移動体速度の差が、移動体の移動速度が小さいために許容範囲内である場合でも、移動体の変位量の大きさを比較することにより、衛星データの検定を実現することができる。
【0016】
また、本発明のデータ検定装置は、人工衛星が送信する航法信号を受信検波する航法信号受信手段と、前記航法信号受信手段が受信した航法信号と前記航法信号の伝播時間とを用いて移動体の絶対位置を検出する移動体絶対位置検出手段と、前記移動体絶対位置検出手段が検出した絶対位置の誤差を推定する移動体絶対位置誤差推定手段と、前記航法信号受信手段が前記航法信号を受信する時のドップラーシフト周波数から前記人工衛星に対する移動体の方位を検出する衛星移動体方位検出手段と、前記衛星移動体方位検出手段が検出した移動体方位の誤差を推定する衛星移動体方位誤差推定手段と、前記移動体の一定時間の間の移動量を前記移動体に搭載したセンサにより検出する移動体相対変位検出手段と、前記移動体相対変位検出手段が検出した移動体移動量の誤差を推定する移動体相対変位誤差推定手段と、前記絶対位置検出手段が検出した絶対位置の差分から移動体の移動方向の絶対方位を算出する移動体絶対移動方位算出手段と、前記移動体絶対位置検出手段が検出した絶対位置と前記移動体絶対位置誤差推定手段が推定した絶対位置誤差とを用いて、前記移動体絶対移動方位算出手段が算出した絶対方位に含まれる誤差を推定する移動体絶対移動方位誤差推定手段と、前記衛星移動体方位検出手段が検出した移動体方位と前記移動体相対変位検出手段が検出した移動体移動量とを用いて移動体の移動方位を算出する移動体移動方位算出手段と、前記衛星移動体方位誤差推定手段が推定した移動体方位誤差と前記移動体相対変位誤差推定手段が推定した移動体相対変位誤差とを用いて、前記移動体移動方位算出手段が算出した移動方位に含まれる誤差を算出する移動体移動方位誤差推定手段と、前記移動体絶対移動方位算出手段が算出した一定時間の間の絶対移動方位と前記移動体移動方位算出手段が算出した一定時間の間の移動体移動方位との差分絶対値が、前記移動体絶対移動方位誤差推定手段が推定した移動体絶対移動方位誤差と前記移動体移動方位誤差推定手段が推定した移動体移動方位誤差との和よりも大きいかどうかを判定する変位方向判定手段とを備えたことを特徴とする。この構成により、算出した一定時間の間の絶対移動方位と移動体移動方位との差分絶対値が、推定した移動体絶対移動方位誤差と移動体移動方位誤差との和よりも大きい場合に、衛星データを無効と判定するので、衛星データの異常を判定するための基準値を予め設定することなしに、衛星データの検定を行うことができる。また、衛星信号を所定回数連続して受信する必要がないため、衛星信号の連続受信が困難な場所であっても、衛星データの検定を行うことができる。さらに、衛星信号に基づく移動体速度とセンサに基づく移動体速度の差が、移動体の移動速度が小さいために許容範囲内である場合でも、移動体の変位方向を比較することにより衛星データの検定を実現することができる。
【0017】
また、本発明のデータ検定装置は、人工衛星が送信する航法信号を受信検波する航法信号受信手段と、前記航法信号受信手段が受信した航法信号と前記航法信号の伝播時間とを用いて移動体の絶対位置を検出する移動体絶対位置検出手段と、前記移動体絶対位置検出手段が検出した絶対位置の誤差を推定する移動体絶対位置誤差推定手段と、前記検出された移動体絶対位置および前記推定された移動体絶対位置誤差を一定時間の間蓄積する蓄積手段と、前記航法信号受信手段が前記航法信号を受信する時のドップラーシフト周波数から前記人工衛星に対する移動体の方位を検出する衛星移動体方位検出手段と、前記衛星移動体方位検出手段が検出した衛星移動体方位の誤差を推定する衛星移動体方位誤差推定手段と、前記移動体の一定時間の間の移動量を前記移動体に搭載したセンサにより検出する移動体相対変位検出手段と、前記移動体相対変位検出手段が検出した移動体移動量の誤差を推定する移動体相対変位誤差推定手段と、前記衛星移動体方位検出手段が検出した衛星移動体方位と前記移動体相対変位検出手段が検出した移動体相対方位とを用いて、移動体の移動方位および移動距離をそれぞれ算出して自立移動ベクトルを生成する移動体自立移動ベクトル生成手段と、前記衛星移動体方位誤差推定手段が推定した衛星移動体方位誤差と前記移動体相対変位誤差推定手段が推定した移動体相対変位誤差とを用いて、前記自立移動ベクトルの移動方位および移動距離に含まれる誤差をそれぞれ推定する移動体自立移動ベクトル誤差推定手段と、前記蓄積手段が蓄積している一定時間だけ過去の移動体絶対位置を、前記移動体自立移動ベクトル算出手段が算出した自立移動ベクトルの分だけ平行移動した位置を算出する平行移動位置算出手段と、前記移動体絶対位置検出手段が検出した最新の移動体絶対位置と前記平行移動位置算出手段が算出した平行移動後の位置との距離が、前記移動体絶対位置誤差推定手段が推定した最新の移動体絶対位置に含まれる誤差と前記蓄積手段が蓄積した一定時間だけ過去の移動体絶対位置に含まれる誤差ならびに前記移動体自立移動ベクトル誤差推定手段が推定した自立移動ベクトルの方位および距離に含まれる誤差との総和よりも大きいかどうかを判定するベクトル判定手段とを備えたことを特徴とする。この構成により、検出した最新の移動体絶対位置と平行移動後の位置との距離が、推定した最新の移動体絶対位置に含まれる誤差と蓄積した一定時間だけ過去の移動体絶対位置に含まれる誤差ならびに推定した自立移動ベクトルの方位および距離に含まれる誤差との総和よりも大きい場合に、衛星データを無効と判定するので、衛星データの異常を判定するための基準値を予め設定することなしに、衛星データの検定を行うことができる。また、衛星信号を所定回数連続して受信する必要がないため、衛星信号の連続受信が困難な場所であっても、衛星データの検定を行うことができる。さらに、衛星信号に基づく移動体速度とセンサに基づく移動体速度の差が、移動体の移動速度が小さいために許容範囲内である場合でも、移動体の移動ベクトルを比較することにより衛星データの検定を実現することができる。
【0018】
また、本発明のデータ検定方法は、人工衛星が送信する航法信号を受信検波するステップと、前記航法信号を受信する時のドップラーシフト周波数から前記人工衛星に対する移動体の速度を検出するステップと、前記検出した衛星移動体速度の誤差を推定するステップと、前記移動体の移動速度を前記移動体に搭載したセンサにより検出するステップと、前記検出した移動体移動速度に含まれる誤差を推定するステップと、前記検出した衛星移動体速度と移動体移動速度との差が、前記推定した衛星移動体速度誤差と移動体移動速度誤差との和よりも大きいどうかを判定するステップとを備えたことを特徴とする。この処理により、検出した衛星移動体速度と移動体移動速度との差が、推定した衛星移動体速度誤差と移動体移動速度誤差との和よりも大きい場合に、衛星データを無効と判定するので、衛星データの異常を判定するための基準値を予め設定することなしに、衛星データの検定を行うことができる。また、衛星信号を所定回数連続して受信する必要がないため、衛星信号の連続受信が困難な場所であっても、衛星データの検定を行うことができる。
【0019】
また、本発明のデータ検定方法は、人工衛星が送信する航法信号を受信検波するステップと、前記航法信号を受信する時のドップラーシフト周波数から前記人工衛星に対する移動体の方位を検出するステップと、前記検出した衛星移動体方位の誤差を推定するステップと、前記移動体の一定時間の間の方位変化量を前記移動体に搭載したセンサにより検出するステップと、前記検出した一定時間の間の方位変化量に含まれる誤差を推定するステップと、前記検出した一定時間の間の移動体方位の差分と方位変化量の差分との差が、前記推定した移動体方位誤差と移動体相対方位誤差との和よりも大きいどうかを判定するステップとを備えたことを特徴とする。この処理により、検出した一定時間の間の移動体方位の差分と方位変化量の差分との差が、推定した移動体方位誤差と移動体相対方位誤差との和よりも大きい場合に、衛星データを無効と判定するので、衛星データの異常を判定するための基準値を予め設定することなしに、衛星データの検定を行うことができる。また、衛星信号を所定回数連続して受信する必要がないため、衛星信号の連続受信が困難な場所であっても、衛星データの検定を行うことができる。さらに、衛星信号に基づく移動体速度とセンサに基づく移動体速度の差が、移動体の移動速度が小さいために許容範囲内である場合でも、移動体の方位変化量の大きさを比較することにより、衛星データの検定を実現することができる。
【0020】また、本発明のデータ検定方法は、人工衛星が送信する航法信号を受信検波するステップと、前記受信した航法信号とその伝播時間とを用いて移動体の絶対位置を検出するステップと、前記検出した絶対位置の誤差を推定するステップと、前記移動体の一定時間の間の移動量を前記移動体に搭載したセンサにより検出するステップと、前記検出した移動体移動量の誤差を推定するステップと、前記検出した一定時間の間の絶対位置間の距離と移動体移動量との差が、前記推定した絶対位置誤差と移動体相対変位誤差との和よりも大きいどうかを判定するステップとを備えたことを特徴とする。この構成により、検出した一定時間の間の絶対位置間の距離と移動体移動量との差が、推定した絶対位置誤差と移動体相対変位誤差との和よりも大きい場合に、衛星データを無効と判定するので、衛星データの異常を判定するための基準値を予め設定することなしに、衛星データの検定を行うことができる。また、衛星信号を所定回数連続して受信する必要がないため、衛星信号の連続受信が困難な場所であっても、衛星データの検定を行うことができる。さらに、衛星信号に基づく移動体速度とセンサに基づく移動体速度の差が、移動体の移動速度が小さいために許容範囲内である場合でも、移動体の変位量の大きさを比較することにより、衛星データの検定を実現することができる。
【0021】
また、本発明のデータ検定方法は、人工衛星が送信する航法信号を受信検波するステップと、前記受信した航法信号とその伝播時間とを用いて移動体の絶対位置を検出するステップと、前記検出した絶対位置の誤差を推定するステップと、前記航法信号を受信する時のドップラーシフト周波数から前記人工衛星に対する移動体の方位を検出するステップと、前記検出した移動体方位の誤差を推定するステップと、前記移動体の一定時間の間の移動量を前記移動体に搭載したセンサにより検出するステップと、前記検出した移動体移動量の誤差を推定するステップと、前記検出した絶対位置の差分から移動体の移動方向の絶対方位を算出するステップと、前記検出した絶対位置と前記推定した絶対位置誤差とを用いて、前記算出した絶対方位に含まれる誤差を推定するステップと、前記検出した移動体方位と移動体移動量とを用いて移動体の移動方位を算出するステップと、前記推定した移動体方位誤差と移動体相対変位誤差とを用いて、前記算出した移動方位に含まれる誤差を算出するステップと、前記算出した一定時間の間の絶対移動方位と移動体移動方位との差分絶対値が、前記推定した移動体絶対移動方位誤差と移動体移動方位誤差との和よりも大きいかどうかを判定するステップとを備えたことを特徴とする。この構成により、算出した一定時間の間の絶対移動方位と移動体移動方位との差分絶対値が、推定した移動体絶対移動方位誤差と移動体移動方位誤差との和よりも大きい場合に、衛星データを無効と判定するので、衛星データの異常を判定するための基準値を予め設定することなしに、衛星データの検定を行うことができる。また、衛星信号を所定回数連続して受信する必要がないため、衛星信号の連続受信が困難な場所であっても、衛星データの検定を行うことができる。さらに、衛星信号に基づく移動体速度とセンサに基づく移動体速度の差が、移動体の移動速度が小さいために許容範囲内である場合でも、移動体の変位方向を比較することにより衛星データの検定を実現することができる。
【0022】
また、本発明のデータ検定方法は、人工衛星が送信する航法信号を受信検波するステップと、前記受信した航法信号とその伝播時間とを用いて移動体の絶対位置を検出するステップと、前記検出した絶対位置の誤差を推定するステップと、前記検出された移動体絶対位置および前記推定された移動体絶対位置誤差を一定時間の間蓄積するステップと、前記航法信号を受信する時のドップラーシフト周波数から前記人工衛星に対する移動体の方位を検出するステップと、前記検出した衛星移動体方位の誤差を推定するステップと、前記移動体の一定時間の間の移動量を前記移動体に搭載したセンサにより検出するステップと、前記検出した移動体移動量の誤差を推定するステップと、前記検出した衛星移動体方位と移動体相対方位とを用いて、移動体の移動方位および移動距離をそれぞれ算出して自立移動ベクトルを生成するステップと、前記推定した衛星移動体方位誤差と移動体相対変位誤差とを用いて、前記自立移動ベクトルの移動方位および移動距離に含まれる誤差をそれぞれ推定するステップと、前記蓄積している一定時間だけ過去の移動体絶対位置を、前記算出した自立移動ベクトルの分だけ平行移動した位置を算出するステップと、前記検出した最新の移動体絶対位置と前記算出した平行移動後の位置との距離が、前記推定した最新の移動体絶対位置に含まれる誤差と前記蓄積した一定時間だけ過去の移動体絶対位置に含まれる誤差ならびに前記推定した自立移動ベクトルの方位および距離に含まれる誤差との総和よりも大きいかどうかを判定するベクトル判定手段とを備えたことを特徴とする。この処理により、検出した最新の移動体絶対位置と平行移動後の位置との距離が、推定した最新の移動体絶対位置に含まれる誤差と蓄積した一定時間だけ過去の移動体絶対位置に含まれる誤差ならびに推定した自立移動ベクトルの方位および距離に含まれる誤差との総和よりも大きい場合に、衛星データを無効と判定するので、衛星データの異常を判定するための基準値を予め設定することなしに、衛星データの検定を行うことができる。また、衛星信号を所定回数連続して受信する必要がないため、衛星信号の連続受信が困難な場所であっても、衛星データの検定を行うことができる。さらに、衛星信号に基づく移動体速度とセンサに基づく移動体速度の差が、移動体の移動速度が小さいために許容範囲内である場合でも、移動体の移動ベクトルを比較することにより衛星データの検定を実現することができる。
【0023】
また、本発明は、上記したデータ検定方法をコンピュータが読み取り可能な形式で記述した制御プログラムであり、この制御プログラムをインストールすることによりコンピュータを利用して本発明を実現することができる。
【0024】
また、本発明は、上記した制御プログラムをコンピュータが読み取り可能な形式で記録した記録媒体であり、この記録媒体を用いることにより移動体等に搭載されたコンピュータにより本発明を実現することができる。
【0025】
【発明の実施の形態】
以下、本発明の実施の形態について、図面を用いて説明する。
(実施の形態1)
図1は本発明の第1の実施の形態におけるGPSデータ検定装置の構成を示している。本発明の実施の形態1は、GPS衛星からの信号のドップラーシフトにより得られる速度と、車輪の回転数を計測する回転センサや非接触型センサにより得られる速度とを比較してGPSデータの検定を行うものである。図1において、航法信号受信手段であるGPS受信手段101は、GPS衛星からの送信信号を受信検波する。GPS移動体速度検出手段102は、GPS信号を受信した時のドップラーシフトからGPS衛星に対する移動体の移動速度(GPS移動体速度)を算出する。GPS移動体速度誤差推定手段103は、受信している衛星の配置状況等の測位精度を表す指標に応じて、GPS移動体速度に含まれる誤差を算出するものであり、精度指標としてDOP(Delusion Of Precision)値等が用いられる。GPS移動体速度誤差推定手段103は、DOP値が小さくなるに従ってGPS移動体速度の推定誤差を小さくする。移動体移動速度検出手段104は、移動体に搭載されたセンサを用いて移動体の移動速度(移動体移動速度)の検出を行う。車輪を有する移動体である場合は、車輪軸に取り付けた回転センサを利用して、車輪の単位時間当たり回転数と車輪外径の積を取ることで移動体の移動速度を検出することができる。その他の移動体移動速度検出手段として、非接触型速度センサなど、GPS以外の方法で移動体移動速度を検出するようなセンサを用いることが可能である。移動体移動速度誤差推定手段105は、移動体移動速度検出算出手段104が検出した移動体移動速度に含まれている誤差を推定する。前記の回転センサを用いる場合は、回転センサの分解能や車輪外径の誤差範囲から速度の誤差を推定することが可能となる。速度判定手段106は、GPS移動体速度検出手段102が検出した移動体速度と移動体移動速度検出手段104が検出した移動体移動速度との差分が、GPS移動体速度誤差推定手段103が推定するGPS移動体速度誤差と移動体移動速度誤差推定手段105が推定する移動体移動速度誤差との和よりも大きくなった場合に、該当するGPSデータを無効と判定する。
【0026】
図2は本実施の形態1におけるGPSデータ検定装置の動作を説明するフローチャートである。図2において、ステップ201では、GPS受信手段101におけるGPS信号の受信状態を判定し、移動体速度を算出可能な状態であればステップ202へ、移動体速度の算出が不可能な状態であればステップ207の処理をそれぞれ行う。ステップ202では、GPS移動体速度検出手段102により移動体速度を算出する。ステップ203では、GPS移動体速度誤差推定手段103において移動体速度誤差を推定する。ステップ204では、移動体移動速度検出手段104により移動体移動速度の検出を行う。ステップ205では、ステップ204で検出した移動体移動速度に含まれる誤差を推定する。ステップ206では、速度判定手段106により、移動体速度と移動体移動速度との差分の絶対値と、GPS移動体速度誤差推定手段103が推定した移動体速度誤差と移動体移動速度誤差推定手段105が推定した移動体移動速度誤差の和とを比較して、移動体速度と移動体移動速度の差分絶対値が大きい場合にはステップ207へ、そうでない場合はステップ208の処理を行う。ステップ207では、GPSデータが無効となるように判定ステータスを設定する。ステップ208では、GPSデータが有効となるように判定ステータスを設定する。ステップ209では、ステシプ207またはステップ208で設定した判定ステータスの状態を外部に出力する。
【0027】
このように、本実施の形態1によれば、GPS衛星からの信号のドップラーシフトにより得られる移動体の速度と、車輪の回転数を計測する回転センサや非接触型センサにより得られる移動体の移動速度とを比較し、移動体速度と移動体移動速度との差分値が、移動体速度誤差と移動体移動速度誤差との和よりも大きくなった場合に、該当するGPSデータを無効と判定するので、GPSデータの異常を検出するための基準値を予め設定することなしに、GPSデータの検定を行うことができる。また、GPS信号を所定回数連続して受信する必要がないため、GPS信号の連続受信が困難な場所であっても、移動体の移動速度を比較することにより、GPSデータの検定を行うことができる。
【0028】
(実施の形態2)
図3は本発明の第2の実施の形態におけるGPSデータ検定装置の構成を示している。本発明の実施の形態2は、GPS衛星からの信号のドップラーシフト周波数により得られるGPS衛星に対する移動体の走行方位の変化量とジャイロセンサや地磁気方位センサなどにより得られる移動体の相対方位の変化量とを比較してGPSデータの検定を行うものである。図3において、航法信号受信手段であるGPS受信手段301は、GPS衛星からの送信信号を受信検波する。GPS移動体方位検出手段302は、GPS信号を受信した時のドップラーシフト周波数からGPS衛星に対する移動体の方位を算出する。GPS移動体方位誤差推定手段303は、移動速度やドップラーシフト周波数に含まれる誤差に応じてGPS移動体方位に含まれる誤差を推定する。移動体相対方位検出手段304は、移動体に搭載された角速度センサの出力に対して積分を行うか、または地磁気方位センサを用いることによって移動体の相対方位を算出する。角速度センサとしては、光ファイバジャイロセンサ、振動ジャイロセンサ等を用いることができる。移動体相対方位誤差推定手段305は、移動体相対方位検出手段304が検出した移動体相対方位に含まれている誤差を推定する。移動体相対方位に含まれている誤差は、センサの零点変動誤差、スケールファクタの誤差、地球の自転によって生じる角速度の影響等を考慮して推定することができる。方位変化量判定手段306は、GPS移動体方位検出手段302が過去のある時刻t1および現在の時刻t2において検出したGPS移動体方位の差分と、移動体相対方位検出手段304が時刻t1からt2の間に検出した相対方位変化量の差分との差分絶対値が、GPS移動体方位誤差推定手段303が推定したGPS移動体方位誤差と移動体相対方位誤差推定手段305が推定した移動体相対方位誤差との和よりも大きいどうかを判定し、変化量の差分絶対値がGPS移動体方位誤差と移動体相対方位誤差との和を超える場合は最新のGPSデータを無効と判定する。
【0029】
図4はGPS移動体方位誤差推定手段303におけるGPSデータの方位誤差推定方法の一例である。真の移動速度401は、移動体の真の移動速度の大きさおよび方向を表す速度ベクトルであり、その大きさをV0とする。GPS移動体速度誤差円402はGPSドップラーシフトによって検出される移動体速度のばらつき範囲を表しており、円の半径をverrとする。真の速度401の速度ベクトル基点からGPS移動体速度誤差円402への接線と、真の速度401が成す角度θmaxの2倍がGPS移動体方位誤差範囲403となる。
【0030】
図5は本実施の形態2におけるGPSデータ検定装置の動作を説明するフローチャートである。図5において、ステップ501では、GPS受信手段301におけるGPS信号の受信状態を判定し、移動体のGPS移動体方位を算出可能な状態であればステップ502へ、GPS移動体方位の算出が不可能な状態であればステップ507の処理をそれぞれ行う。ステップ502では、GPS移動体方位検出手段302によりGPS衛星に対する移動体の走行方位であるGPS移動体方位を算出する。ステップ503では、GPS移動体方位誤差推定手段303においてGPS移動体方位誤差を推定する。ステップ504では、移動体相対方位検出手段304により移動体の相対移動方位を検出する。ステップ505では、ステップ504で検出した移動体相対方位に含まれる誤差を推定する。ステップ506では、方位変化量判定手段306によって、異なる時刻t1とt2におけるGPS移動体方位変化量と移動体相対方位変化量との差分の絶対値と、GPS移動体方位誤差と移動体相対方位誤差との和とを比較して、GPS移動体方位変化量と移動体相対方位変化量との差分絶対値の方が大きい場合にはステップ507、そうでない場合はステップ508の処理を行う。ステップ507では、GPSデータが無効となるように判定ステータスを設定する。ステップ508では、GPSデータが有効となるように判定ステータスを設定する。ステップ509では、ステップ507またはステップ508で設定した判定ステータスの状態を外部に出力する。
【0031】
このように、本実施の形態2によれば、GPS衛星からの信号のドップラーシフトにより得られる移動体の走行方位であるGPS移動体方位と、移動体に搭載された角速度センサまたは地磁気方位センサにより得られる移動体の相対方位とを比較し、GPS移動体方位と移動体相対方位との差分値が、GPS移動体方位誤差と移動体相対方位誤差との和よりも大きくなった場合に、該当するGPSデータを無効と判定するので、GPSデータの異常を検出するための基準値を予め設定することなく、GPSデータの検定を行うことができる。また、GPS信号を所定回数連続して受信する必要がないため、GPS信号の連続受信が困難な場所であっても、GPSデータの検定を行うことができる。さらに、上記実施の形態1におけるGPS信号に基づく移動体速度と車速センサ等に基づく移動体相対速度との差が、移動体の移動速度が小さいために許容範囲内である場合でも、移動体の方位変化量を比較することにより、GPSデータの検定を実現することができる。
【0032】
(実施の形態3)
図6は本発明の第3の実施の形態におけるGPSデータ検定装置の構成を示している。本発明の実施の形態3は、GPS衛星の信号から得られる異なる時刻における移動体の移動距離と、慣性航法によって算出される移動体の移動距離とを比較してGPSデータの検定を行うものである。図6において、航法信号受信手段であるGPS受信手段601は、GPS衛星からの送信信号を受信検波する。移動体絶対位置検出手段602は、GPS衛星からの航法信号を復調して得られるGPS衛星の座標情報とGPS信号の伝搬時間とを用いて三角測量の原理により移動体の絶対位置を検出する。移動体絶対位置誤差推定手段603は、移動体絶対位置検出手段602が検出した移動体の絶対位置に含まれる誤差を推定し、衛星の配置関係を表すDOPやGPS信号強度、航法信号に含まれている電離層遅延情報等を利用して誤差推定を行う。移動体相対変位検出手段604は、移動体に搭載された距離センサと相対方位センサとを組み合わせて移動体の移動距離を検出するものであり、距離センサとしては車輪に取り付けた回転センサや非接触型センサで得られる速度の時間積分等が用いられ、相対方位センサとしては、光ファイバジャイロセンサや振動ジャイロセンサ等の角速度センサ、または地磁気方位センサなどを利用することができる。移動体相対変位誤差推定手段605は、移動体相対変位検出手段604が検出した移動体相対変位に含まれる誤差を推定し、距離誤差成分と方位誤差成分とを組み合わせて移動体相対変位誤差を算出する。変位量判定手段606は、移動体絶対位置検出手段602が過去のある時刻t1および現在の時刻t2において検出した移動体の絶対位置間の差分距離と、移動体相対変位検出手段604が時刻tlからt2の間に検出した移動体の相対変位の差分との差分絶対値が、移動体絶対位置誤差推定手段603が推定した移動体絶対位置誤差と移動体相対変位誤差推定手段605が推定した移動体相対変位との和よりも大きいどうかを判定し、移動体絶対位置間の差分距離と移動体相対変位との差分絶対値が、推定した移動体絶対位置誤差と移動体相対変位との和を超える場合は、最新のGPSデータを無効と判定する。
【0033】
次に、本実施の形態3における移動体絶対位置誤差推定手段603が推定する移動体絶対位置誤差から絶対位置の差分距離に含まれる誤差を推定する方法について、図7を参照しながら説明する。図7において、時刻t1の絶対位置P1における移動体絶対位置誤差701および時刻t2の絶対位置P2における移動体絶対位置誤差702は、実際には必ずしも図示するような半径r1、r2を持つ真円になるとは限らないが、以降の説明を簡単にするため、真円に等しいと仮定する。また、絶対位置差分距離703は、絶対位置P1と絶対位置P2との間の距離であり、絶対位置差分最大距離704は、絶対位置P1と絶対位置P2に含まれている誤差が最大、かつ絶対位置差分距離703に含まれる誤差が最大になる場合の距離を表している。この時、絶対位置差分最大距離704に含まれている誤差は、移動体絶対位置誤差701と移動体絶対位置誤差702の和で表される。
【0034】
次に、本実施の形態3における移動体相対変位誤差推定手段604が推定する移動体の相対変位誤差の算出方法について図8を参照しながら説明する。図8において、移動体相対変位801は、絶対位置P1と絶対位置P2との間の移動体相対変位であり、移動体相対変位802は、移動体相対変位検出手段604に距離誤差が含まれている場合に検出される移動体相対変位であり、移動体相対変位803は、移動体相対変位検出手段604に移動体方位誤差が含まれている場合に検出される移動体相対変位を表している。距離誤差804と距離誤差805は、移動体相対変位802と移動体相対変位803に含まれる距離誤差であり、距離誤差804は車輪回転センサの分解能や車輪外径等の誤差、距離誤差805は方位センサによって生じる方位誤差と移動距離を用いて幾何学的に算出することができる。移動体相対変位誤差推定手段605は、距離誤差804と距離誤差805の和または平方和などによって移動体相対変位誤差を推定する。
【0035】
図9は本実施の形態3におけるGPSデータ検定装置の動作を説明するフローチャートである。図9において、ステップ901では、GPS受信手段601におけるGPS信号の受信状態を判定し、絶対位置の検出が可能な状態であればステップ902へ、絶対位置の検出が不可能な状態であればステップ907の処理をそれぞれ行う。ステップ902では、移動体絶対位置検出手段602により絶対位置を検出する。ステップ903では、移動体絶対位置誤差推定手段603において絶対位置誤差を推定する。ステップ904では、移動体相対変位検出手段604により移動体の移動距離の検出を行う。ステップ905では、ステップ904で検出した移動体相対変位に含まれる誤差を推定する。ステップ906では、変位量判定手段605によって、異なる時刻t1とt2における移動体絶対位置差分距離と移動体相対変位との差分絶対値と、移動体絶対位置誤差と移動体相対変位誤差との和を比較して、位置差分距離と移動体相対変位との差分絶対値の方が大きい場合にはステップ907、そうでない場合はステップ908の処理を行う。ステップ907では、GPSデータが無効となるように判定ステータスを設定する。ステップ908では、GPSデータが有効となるように判定ステータスを設定する。ステップ909では、ステップ907またはステップ908で設定した判定ステータスの状態を外部に出力する。
【0036】
このように、本実施の形態3によれば、GPS衛星の信号から得られる異なる時刻における移動体の絶対位置間距離と、移動体に搭載された距離センサおよび方位センサにより得られる移動体相対変位とを比較し、移動体の絶対位置間距離と移動体相対変位との差分値が、移動体絶対位置誤差と移動体相対変位誤差との和よりも大きくなった場合に、該当するGPSデータを無効と判定するので、GPSデータの異常を検出するための基準値を予め設定することなく、GPSデータの検定を行うことができる。また、GPS信号を所定回数連続して受信する必要がないため、GPS信号の連続受信が困難な場所であっても、GPSデータの検定を行うことができる。さらに、上記実施の形態1におけるGPS信号に基づく移動体速度と車速センサに基づく移動体速度の差が、移動体の移動速度が小さいために許容範囲内である場合でも、移動体の変位量を比較することによりGPSデータの検定を実現することができる。
【0037】
なお、本実施の形態3では、移動体絶対位置誤差推定手段603が推定する誤差の範囲が均等な真円状に分布する場合について説明したが、実際の誤差範囲分布は楕円状になることもあり得ることから、移動体絶対位置誤差推定手段603は、方位に応じて推定する移動体絶対位置誤差を変化させるようにしても良い。
【0038】
(実施の形態4)
図10は本発明の第4の実施の形態におけるGPSデータ検定装置の構成を示している。本発明の実施の形態4は、GPSの移動体絶対位置差分から得られる移動体の絶対移動方位と、慣性航法とGPS方位を組み合わせて算出する移動体の移動方位とを比致してGPSデータの検定を行うものである。図10において、航法信号受信手段であるGPS受信手段1001は、GPS衛星からの送信信号を受信検波する。移動体絶対位置検出手段1002は、GPS衛星からの航法信号を復調して得られるGPS衛星の座標情報とGPS信号の伝搬時間とを用いて三角測量の原理により移動体絶対位置を検出する。移動体絶対位置誤差推定手段1003は、移動体絶対位置検出手段1002が検出した移動体絶対位置に含まれる誤差を推定し、衛星の配置関係を表すDOPやGPS信号強度、航法信号に含まれている電離層遅延情報等を利用して誤差推定を行う。GPS移動体方位検出手段1004は、GPS信号を受信した時のドップラーシフト周波数からGPS衛星に対する移動体の方位を算出する。GPS移動体方位誤差推定手段1005は、移動速度やドップラーシフト周波数に含まれる誤差に応じてGPS移動体方位に含まれる誤差を推定する。移動体相対変位検出手段1006は、移動体に搭載された距離センサと相対方位センサとを組み合わせて移動体の移動距離を検出するものであり、距離センサとしては車輪に取り付けた回転センサや非接触型センサで得られる速度の時間積分等が用いられ、相対方位センサとしては、光ファイバジャイロセンサや振動ジャイロセンサ等の角速度センサ、または地磁気方位センサなどを利用することができる。移動体相対変位誤差推定手段1007は、移動体相対変位検出手段1006が検出した移動体相対変位に含まれる誤差を推定し、距離誤差成分と方位誤差成分とを組み合わせて移動体相対変位誤差を算出する。移動体絶対移動方位算出手段1008は、移動体絶対位置検出手段1002が算出した移動体絶対位置の差分から移動方向の絶対方位を算出する。移動体絶対移動方位誤差推定手段1009は、移動体絶対位置検出手段1002と移動体絶対位置誤差推定手段1003が推定した移動体絶対位置誤差のデータを用いて、移動体絶対移動方位算出手段1008が算出した絶対方位に含まれる誤差を推定する。移動体移動方位算出手段1010は、GPS移動体方位検出手段1004が算出した移動体の方位と移動体相対変位検出手段1006が算出した移動体の相対変位を用いて移動体の移動方位を算出する。移動体移動方位誤差推定手段1011は、GPS移動体方位誤差推定手段1005が推定したGPS移動体方位誤差と移動体相対変位誤差推定手段1007が推定した移動体相対変位誤差を用いて、移動体移動方位算出手段1010が算出した移動体移動方位に含まれている誤差を推定する。変位方向判定手段1012は、移動体絶対移動方位算出手段1008が算出した絶対移動方位と移動体移動方位算出手段1010が算出した移動体移動方位の差分絶対値が、移動体絶対移動方位誤差推定手段1009が推定した絶対移動方位誤差と移動体移動方位誤差推定手段1011が推定した移動体移動方位誤差との和よりも大きいかどうかを判定し、移動体絶対移動方位算出手段1008が算出した絶対移動方位と移動体移動方位算出手段1010が算出した移動体移動方位の差分絶対値が、移動体絶対移動方位誤差推定手段1009が推定した絶対移動方位誤差と移動体移動方位誤差推定手段1011が推定した移動体移動方位誤差との和を超えた場合に最新のGPSデータを無効と判定する。
【0039】
次に、本実施の形態4おける移動体絶対移動方位誤差推定手段1009の誤差推定方法を図11を参照しながら説明する。図11において、移動体絶対位置差分ベクトル1101は、移動体絶対位置検出手段1002が検出した異なる時刻t1とt2における2点P1、P2の絶対位置の差分ベクトルであり、移動体絶対位置誤差1102および1103はそれぞれ2点P1、P2の移動体絶対位置において移動体絶対位置誤差推定手段1003が推定した絶対位置誤差を表している。この時、移動体絶対位置差分ベクトル1101に含まれる最大の方位誤差1104は、移動体絶対位置差分ベクトル1101の長さと移動体絶対位置誤差1102、1103とをそれぞれ用いて、幾何学的に算出することができる。方位誤差1104は、移動体絶対位置差分ベクトル1101の距離が大きくなるほど小さくなる。
【0040】
次に、本実施の形態4における移動方位算出方法について図12を参照しながら説明する。図12において、移動体相対方位1201は、移動体相対変位検出手段1006が推定した相対方位、GPS移動体方位1202は、相対方位1201と同時刻にGPS移動体方位検出手段1004が検出した移動体の方位である。移動体移動方位1203は、移動体移動方位算出手段1010が算出した移動体移動方位である。移動体相対方位1201とGPS移動体方位1202の差は、相対方位センサの誤差が少なければほぼ一定に保たれる。したがつて、移動体相対方位1201とGPS移動体方位1202の差の時系列的な平均を取ることで、相対方位に対する絶対方位の方位オフセット1204を算出し、移動体移動方位1203に方位オフセット1204を加算することで移動体移動方位1205を算出する。また、移動体移動方位誤差算出手段1011は、GPS移動体方位1202に含まれる誤差と方位オフセット1204に含まれる誤差の和によって移動方位誤差を推定する。
【0041】
図13は本実施の形態におけるGPSデータ検定装置の動作を説明するフローチャートである。図13において、ステップ1301ではGPSを用いて移動体絶対位置検出およびGPS方位検出が共に可能かどうかを判定し、可能な状態であればステップ1302の処理へ、不可能であればステップ1313の処理に進む。ステップ1302では、移動体絶対位置検出手段1002において移動体絶対位置の検出を行う。ステップ1303では、移動体絶対位置誤差推定手段1003において、ステップ1302で検出した移動体絶対位置に含まれている誤差を推定する。ステップ1304では、GPS移動体方位検出手段1004においてGPS信号のドップラーシフトによつて得られる移動体の方位を検出する。ステップ1305では、移動速度やドップラーシフトに含まれる誤差に応じてGPS移動体方位に含まれる誤差を推定する。ステップ1306では、移動体相対変位検出手段1006により移動体の相対変位の検出を行う。ステップ1307では、移動体相対変位誤差算出手段1007によりステップ1306で検出した相対方位の誤差を推定する。ステップ1308では、移動体移動方位算出手段1010により図12の方法を用いて移動体の移動方位を算出する。ステップ1309では、ステップ1303で推定した移動体絶対位置誤差とステップ1307で推定した移動体相対方位誤差を用いて、移動体移動方位に含まれている誤差を推定する。ステップ1310では、移動体絶対位置検出手段1002が検出する2点P1、P2の絶対位置の差分から移動体絶対移動方位算出手段1008により移動体の絶対移動方位を検出する。ステップ1311では、移動体絶対移動方位誤差推定手段1009により図11の方法を用いて絶対移動方位に含まれている誤差を推定する。ステップ1312では、変位方向判定手段1012により、ステップ1308で算出した移動体移動方位とステップ1310で算出した移動体絶対移動方位の差分が、ステップ1309で推定した移動体移動方位誤差とステップ1311で推定した移動体絶対方位誤差の和を超える場合には最新のGPSデータを異常と判定する。ステップ1313では、GPSデータが無効となるように判定ステータスを設定する。ステップ1314では、GPSデータが有効となるように判定ステータスを設定する。ステップ1315では、ステップ1313またはステップ1314で設定した判定ステータスの状態を外部に出力する。
【0042】
このように、本実施の形態4によれば、GPSに基づく異なる時刻における移動体の絶対移動方位と、移動体に搭載された距離センサおよび方位センサに基づく移動体移動方位とを比較し、移動体の絶対移動方位と移動体移動方位との差分値が、絶対移動方位誤差と移動体移動方位誤差との和よりも大きくなった場合に、該当するGPSデータを無効と判定するので、GPSデータの異常を検出するための基準値を予め設定することなしに、GPSデータの検定を行うことができる。また、衛星信号を所定回数連続して受信する必要がないため、衛星信号の連続受信が困難な場所であっても、GPSデータの検定を行うことができる。さらに、衛星信号に基づく移動体速度とセンサに基づく移動体速度の差が、移動体の移動速度が小さいために許容範囲内である場合でも、移動体の変位方向を比較することにより、GPSデータの検定を実現することができる。さらに、移動体の移動速度が低い場合に、上記実施の形態3ではGPS移動体方位誤差推定手段が推定するGPS移動体方位の推定判定精度が大きくなるため、GPSデータの異常検出が困難である場合でも、本実施の形態4によれば正確にGPSデータ検定を行うことができる。
【0043】
(実施の形態5)
図14は本発明の第5の実施の形態におけるGPSデータ検定装置の構成を示している。本発明の実施の形態5は、GPSを用いて時間tだけ過去に検出した移動体絶対位置に対し自立移動ベクトルの分だけ平行移動させた位置と、最新の移動体絶対位置とを比較してGPSデータ検定を行うものである。図14において、航法信号受信手段であるGPS受信手段1401は、GPS衛星からの送信信号を受信検波する。移動体絶対位置検出手段1402は、GPS衛星からの航法信号を復調して得られるGPS衛星の座標情報とGPS信号の伝搬時間とを用いて三角測量の原理により移動体絶対位置を検出する。移動体絶対位置誤差推定手段1403は、移動体絶対位置検出手段1402が検出した移動体絶対位置に含まれる誤差を推定し、衛星の配置関係を表すDOPやGPS信号強度、航法信号に含まれている電離層遅延情報等を利用して誤差推定を行う。GPS移動体方位検出手段1404は、GPS信号を受信した時のドップラーシフト周波数からGPS衛星に対する移動体の方位を算出する。GPS移動体方位誤差推定手段1405は、移動速度やドップラーシフト周波数に含まれる誤差に応じてGPS移動体方位に含まれる誤差を推定する。移動体相対変位検出手段1406は、移動体に搭載された距離センサと相対方位センサとを組み合わせて移動体の移動距離を検出するものであり、距離センサとしては車輪に取り付けた回転センサや非接触型センサで得られる速度の時間積分等が用いられ、相対方位センサとしては、光ファイバジャイロセンサや振動ジャイロセンサ等の角速度センサ、または地磁気方位センサなどを利用することができる。移動体相対変位誤差推定手段1407は、移動体相対変位検出手段1406が検出した移動体相対変位に含まれる誤差を推定し、距離誤差成分と方位誤差成分とを組み合わせて移動体相対変位誤差を算出する。蓄積手段1408は、移動体絶対位置検出手段1402が検出した移動体絶対位置と移動体絶対位置誤差推定手段1403が推定した移動体絶対位置誤差とをそれぞれ最新のデータから時間tだけ遡ったデータまでを一時的に蓄積する。移動体自立移動ベクトル生成手段1409は、GPS移動体方位検出手段1404が検出したGPS方位と移動体相対変位検出手段1406が検出した移動体相対方位を用いて、移動体の移動方向ならびに移動距離をそれぞれ算出して自立移動ベクトルを生成する。移動体自立移動ベクトル誤差算出手段1410は、GPS移動体方位誤差推定手段1405が推定したGPS方位誤差と移動体相対変位誤差検出手段1407が推定した移動体相対変位誤差を用いて、自立移動ベクトルの移動方位ならびに距離に含まれている誤差をそれぞれ推定する。平行移動位置算出手段1411は、蓄積手段1408が蓄積している時間tだけ過去の移動体絶対位置を、移動体自立移動ベクトル算出手段1409が算出した自立移動ベクトルの分だけ平行移動した位置を算出する。ベクトル判定手段1412は、移動体絶対位置検出手段1402が検出した最新の移動体絶対位置と平行移動位置算出手段1411が算出した平行移動後の位置との距離が、移動体絶対位置誤差推定手段1403が推定した最新の移動体絶対位置に含まれる誤差と蓄積手段1408が蓄積した時間tだけ過去の移動体絶対位置に含まれる誤差と移動体自立移動ベクトル誤差推定手段1410が推定した自立移動ベクトルの方位ならびに距離に含まれる誤差との総和を超えるかどうかを調べて、GPSデータの有効か無効化を判定する。
【0044】
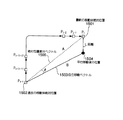
次に、本実施の形態5における平行移動後の位置と、最新の移動体絶対位置とを比較する方法について図15を参照しながら説明する。図15は移動体絶対位置と自立移動ベクトルと平行移動後の位置との関係を説明する図である。図15において、最新の移動体絶対位置1501は、移動体絶対位置検出手段1402が検出した最新の移動体絶対位置を表し、過去の移動体絶対位置1502は、蓄積手段1408が蓄積した時間tだけ過去の移動体絶対位置を表している。また自立移動ベクトル1503は、移動体自立移動ベクトル生成手段1409が生成した自立移動ベクトルであって、上記実施の形態4における図12を用いて説明した方法と同様の方法で自立移動ベクトルの方位を算出する。平行移動後の位置1504は、平行移動位置算出手段1411が算出した平行移動後の位置を表している。絶対位置差分ベクトル1505は、最新の移動体絶対位置1501と過去の移動体絶対位置1502との差分ベクトルである。ベクトル判定手段1412は、まず最新の移動体絶対位置1501と平行移動後の位置1504との距離Lを算出し、距離Lが許容範囲内であるかどうかを判定する。距離Lは、絶対位置差分ベクトル1505と自立移動ベクトル1503とが成す角度をθとすると、数式1を用いて算出することができる。
|A−B|2=|A|2+|B|2+2|A||B|cosθ
但し、A:絶対位置差分ベクトル
B:自立移動ベクトル
θ:AとBとがなす角度
【0045】
図16は本実施の形態5におけるGPSデータ検定装置の動作を説明するフローチャートである。図16において、ステップ1601では、GPSを用いて移動体絶対位置検出およびGPS方位検出が共に可能かどうかを判定し、共に可能な状態であればステップ1602の処理へ、それ以外はステップ1613の処理に進む。ステップ1602では、移動体絶対位置検出手段1402によって移動体絶対位置の検出を行う。ステップ1603では、移動体絶対位置誤差推定手段1403においてステップ1602で検出した移動体絶対位置に含まれている誤差を推定する。ステップ1604では、ステップ1602で検出した移動体絶対位置およびステップ1603で推定した移動体絶対位置誤差を蓄積手段1408によって時間tだけ蓄積する。ステップ1605では、GPS移動体方位検出手段1404においてGPS信号のドップラーシフトによって得られるGPS移動体方位を検出する。ステップ1606では、GPS移動体方位誤差推定手段1405によって、ステップ1605で検出したGPS移動体方位に含まれる誤差を推定する。ステップ1607では、移動体相対変位検出手段1406によって移動体相対変位を検出する。ステップ1608では、移動体相対変位誤差推定手段1407によってステップ1607で検出した移動体相対方位に含まれる誤差を推定する。ステップ1609では、移動体自立移動ベクトル生成手段1409によって移動体自立移動ベクトルを生成する。ステップ1610では、移動体自立移動ベクトル誤差推定手段1410によって移動体自立移動ベクトルに含まれる方位誤差ならびに距離誤差を推定する。ステップ1611では、平行移動位置算出手段1411によって、ステップ1604で蓄積しておいた時間tだけ過去の移動体絶対位置を、ステップ1609で生成した自立移動ベクトルを用いて平行移動を行い、平行移動後の位置を算出する。ステップ1612では、ベクトル判定手段1412によって、ステップ1602で検出した移動体絶対位置とステップ1611で算出した平行移動後の位置との間の距離Lを比較し、許容誤差範囲を超えている場合にはステップ1613の処理へ、許容誤差範囲内であればステップ1614の処理をそれぞれ行う。ステップ1613では、GPSデータ検定装置が出力するGPSデータ判定ステータスを異常と設定する。ステップ1614では、GPSデータ検定装置出力するGPSデータ判定ステータスを正常と設定する。ステップ1615では、ステップ1613またはステップ1614で設定したGPSデータ判定ステータスを外部に出力する。
【0046】
このように、本実施の形態5によれば、GPSを用いて時間tだけ過去に検出した移動体絶対位置と、最新の移動体絶対位置を自立移動ベクトルの分だけ平行移動させた位置とを比較し、両者間の距離Lが、推定した最新の移動体絶対位置に含まれる誤差と蓄積した一定時間だけ過去の移動体絶対位置に含まれる誤差ならびに推定した自立移動ベクトルの方位および距離に含まれる誤差との総和よりも大きい場合に、GPSデータを無効と判定するので、GPSデータの異常を判定するための基準値を予め設定することなしに、GPSデータの検定を行うことができる。また、衛星信号を所定回数連続して受信する必要がないため、衛星信号の連続受信が困難な場所であっても、GPSデータの検定を行うことができる。さらに、衛星信号に基づく移動体速度とセンサに基づく移動体速度の差が、移動体の移動速度が小さいために許容範囲内である場合でも、移動体の移動ベクトルを比較することにより、GPSデータの検定を実現することができる。
【0047】
なお、上記各実施の形態では、衛星航法システムとしてGPSを利用したが、他の衛星航法システムを利用してもよい。
【0048】
また、上記各実施の形態で説明したGPSデータ検定装置では、位置、速度、方位等の変化量を測定する時間を一定の時間としたが、位置、速度、方位等の変化量を一定時間の分だけ蓄積し、位置、速度、方位等の変化量を測定する時間を変動させながら、1つのGPSデータに対して複数回のGPSデータ検定を試み、異常と判定された回数が予め定められた回数を超える場合にGPSデータを異常と判定するようにしてもよい。これにより、建造物や高架道路下等のように障害物があって衛星信号が受信し難い場所や、衛星受信機の電源を投入した直後のように、連続したGPSデータが取得できない場合でも、GPSデータの検定を実現することができる。
【0049】
また、上記実施の形態では、GPSデータが異常と判定された場合に、その旨の信号を通知することにより、そのときのGPSデータを位置、速度、方位等の算出に利用しないようにしているが、GPSデータが異常と判定された際に、位置、速度、方位等に対する誤差の推定量を拡大することによって、異常と判定されたGPSデータを再起的にGPSデータの検定に利用するようにしてもよい。これにより、GPSデータの異常を検出する手段が異常と判定された場合に、変化量の基準となるGPSデータと本発明の判定結果であるGPSデータのどちらが異常データであるか判断できない場合でも、GPSデータの検定を実現することができる。
【0050】
【発明の効果】
以上説明したように、本発明のデータ検定装置および方法では、衛星信号により得られる移動体の速度と、移動体に搭載したセンサにより得られる移動体の移動速度とを比較し、移動体速度と移動体移動速度との差分値が、推定した移動体速度誤差と移動体移動速度誤差との和よりも大きいかどうかを判定して衛星データの異常を判定するので、衛星データの異常を検出するための基準値を予め設定することなしに、衛星データの検定を行うことができる。また、衛星信号を所定回数連続して受信する必要がないため、衛星信号の連続受信が困難な場所であっても、移動体の移動速度を比較することにより、衛星データの検定を行うことができる。
【図面の簡単な説明】
【図1】本発明の第1の実施の形態におけるGPSデータ検定装置の構成を示すブロック図
【図2】本発明の第1の実施の形態におけるGPSデータ検定装置の処理手順を示すフロー図
【図3】本発明の第2の実施の形態におけるGPSデータ検定装置の構成を示すブロック図
【図4】本発明の第2の実施の形態におけるGPSデータの方位誤差推定方法についての説明する模式図
【図5】本発明の第2の実施の形態におけるGPSデータ検定装置の処理手順を示すフロー図
【図6】本発明の第3の実施の形態におけるGPSデータ検定装置の構成を示すブロック図
【図7】本発明の第3の実施の形態におけるGPSデータの移動体絶対位置の誤差について説明する模式図
【図8】本発明の第3の実施の形態における相対位置誤差の推定方法について説明する模式図
【図9】本発明の第3の実施の形態におけるGPSデータ検定装置の処理手順を示すフロー図
【図10】本発明の第4の実施の形態におけるGPSデータ検定装置の構成を示すブロック図
【図11】本発明の第4の実施の形態における絶対方位誤差推定手段の誤差推定方法について説明する模式図
【図12】本発明の第4の実施の形態における移動方位算出方法について説明する模式図
【図13】本発明の第4の実施の形態におけるGPSデータ検定装置の処理手順を示すフロー図
【図14】本発明の第5の実施の形態におけるGPSデータ検定装置の構成を示すブロック図
【図15】本発明の第5の実施の形態における平行移動後の位置と最新の移動体絶対位置との比較方法について説明する模式図
【図16】本発明の第5の実施の形態におけるGPSデータ検定装置の処理手順を示すフロー図
【符号の説明】
101 GPS受信手段
102 GPS移動体速度検出手段
103 GPS移動体速度誤差推定手段
104 移動体移動速度検出手段
105 移動体移動速度誤差推定手段
106 速度判定手段
301 GPS受信手段
302 GPS移動体方位検出手段
303 GPS移動体方位誤差推定手段
304 移動体相対方位検出手段
305 移動体相対方位誤差推定手段
306 方位変化量判定手段
601 GPS受信手段
602 移動体絶対位置検出手段
603 移動体絶対位置誤差推定手段
604 移動体相対変位検出手段
605 移動体相対変位誤差推定手段
606 変位量判定手段
1001 GPS受信手段
1002 移動体絶対位置検出手段
1003 移動体絶対位置誤差推定手段
1004 GPS移動体方位検出手段
1005 GPS移動体方位誤差推定手段
1006 移動体相対変位検出手段
1007 移動体相対変位誤差推定手段
1008 移動体絶対移動方位算出手段
1009 移動体絶対移動方位誤差推定手段
1010 移動体移動方位算出手段
1011 移動体移動方位誤差推定手段
1012 変位方向判定手段
1401 GPS受信手段
1402 移動体絶対位置検出手段
1403 移動体絶対位置誤差推定手段
1404 GPS移動体方位検出手段
1405 GPS移動体方位誤差推定手段
1406 移動体相対変位検出手段
1407 移動体相対変位誤差推定手段
1408 蓄積手段
1409 移動体自立移動ベクトル生成手段
1410 移動体自立移動ベクトル誤差推定手段
1411 平行移動位置算出手段
1412 ベクトル判定手段[0001]
TECHNICAL FIELD OF THE INVENTION
The present invention accurately calculates the detection of the position, moving direction, and moving distance of a moving object by using both satellite navigation using GPS (Global Positioning System) or the like and inertial navigation using a speed sensor, a direction sensor, or the like. And a data verification apparatus for the same.
[0002]
[Prior art]
At present, positioning methods using both GPS and inertial navigation are widely used for detecting the position of a moving object such as an automobile, a ship, or an aircraft. In GPS, it is possible to determine the position of a receiver using the principle of three-point surveying by calculating the positions of a plurality of satellites and the propagation time until the signal transmitted by each satellite reaches the receiver. It is possible. Also, in a situation where an obstacle between a GPS receiver and a satellite exists, such as a tunnel or a high-rise building, and a specified number of GPS satellites cannot be received, the amount of movement from a position measured by the GPS.
A method has been used in which the position of a moving object is specified using inertial navigation, which calculates a relative movement amount from a reference position using a speed sensor or a gyro sensor mounted on the moving object.
[0003]
The positioning accuracy by GPS can be estimated based on the arrangement state of the satellite to be received, the delay generated when the signal transmitted by the satellite passes through the ionosphere and the atmosphere, and the like. However, when reflection occurs due to a high-rise building or the like in the middle of the propagation path of the GPS signal (hereinafter referred to as multipath), a delay occurs in the propagation time from the satellite to the receiver. May cause large errors. For example, in a car navigation device that detects the position of a vehicle using a GPS, a gyro sensor, and a vehicle speed sensor, the GPS data is used to detect the absolute position of the vehicle, detect the zero point of the angular speed sensor, correct the scale factor, calculate the vehicle speed coefficient, and the like. I use it. In such a car navigation device, when the GPS data is affected by the multipath, a large error occurs not only in the position of the vehicle but also in the internal correction coefficient of the sensor, and the positioning accuracy is greatly deteriorated. Probability is high. In order to remove the influence of the abnormal data of the GPS, a method of verifying the GPS data is generally used as a pre-process of the position calculation and the sensor correction.
[0004]
A conventional GPS data verification method is disclosed in, for example, Japanese Patent Application Laid-Open No. 5-19036, in which a PDOP value of data output by a GPS receiver is equal to or less than a certain value, speed data is equal to or more than a certain value, and The GPS data is output only when the difference between the speed data output from the GPS receiver and the speed obtained from the vehicle speed pulse of the speed sensor is equal to or less than a certain value. Alternatively, in addition to the above three conditions, the data from the GPS receiver is continuously obtained three times within a predetermined time, and the azimuth data from the three consecutive GPS receivers is within a predetermined value. It is configured to output GPS data when the conditions are satisfied.
[0005]
In the GPS receiver disclosed in Japanese Patent Application Laid-Open No. 6-66916, when the speed calculated by the GPS receiver exceeds the speed limit value of the moving object, the speed calculated by the previous calculation is obtained. The present position, speed, direction, and acceleration are displayed.
[0006]
Further, the GPS receiver disclosed in Japanese Patent Application Laid-Open No. 8-43515 has a configuration in which the GPS data is not used for the positioning calculation when the temporal fluctuation amount of the Doppler shift frequency exceeds a predetermined value. I have.
[0007]
Also, in the navigation device disclosed in Japanese Patent Application Laid-Open No. 11-83979, the speed of the vehicle obtained from the Doppler shift frequency of the satellite radio wave received from the GPS satellite and the speed of the vehicle obtained from the speed pulse of the speed sensor and the like are determined. If the difference exceeds a preset reference value, it is determined that an error due to multipath has occurred, and the combination of receiving satellites used for positioning calculation is changed to enable high-accuracy positioning.
[0008]
[Problems to be solved by the invention]
However, in the conventional GPS data verification method, it is necessary to set a reference value in advance when comparing the difference between the calculation result of the GPS positioning means and the speed obtained from the vehicle speed pulse of the speed sensor with the reference value. For example, the GPS data verification method described in Japanese Patent Application Laid-Open No. HEI 5-19036 discloses a method for moving three speeds: a traveling speed, a PDOP value, and a difference between speed data output from a GPS receiver and an output from a speed sensor such as a vehicle speed pulse. There was a problem that an appropriate reference value had to be selected in advance according to the characteristics of the body and the sensor. In addition, since GPS data that is continuous for a predetermined number of times is required, the GPS signal may be used in a place where it is difficult to receive a GPS signal due to an obstacle such as a building or under an elevated road, or immediately after the GPS receiver is turned on. There was a problem that the data could not be verified.
[0009]
In the GPS receiver described in JP-A-6-66916 and the GPS receiver described in JP-A-8-43515, the reference value is set to an upper limit based on the speed limit or the acceleration limit of the moving object, respectively. In this case, when the speed or acceleration of the moving object is extremely low compared to the upper limit, the allowable error range becomes large, and the accuracy of determining that the GPS data is abnormal is deteriorated. As a specific example, when the upper limit of the speed of the moving object is 100 km / h, a speed error up to 90 km / h is allowed when the moving speed is 10 km / h.
[0010]
Further, in the GPS receiver described in Japanese Patent Application Laid-Open No. 8-43515, when an abnormality is determined using the amount of fluctuation with reference to the GPS data at a certain time, the GPS data actually used as a reference or the determination is used. There is a problem that it is not possible to determine which of the target GPS data is abnormal data.
[0011]
Also, in the navigation device described in Japanese Patent Application Laid-Open No. H11-83979, only the difference between the speed of the vehicle obtained from the Doppler shift frequency of the satellite radio wave received from the GPS satellite and the speed of the vehicle obtained from the speed sensor such as a vehicle speed pulse is calculated. Is used to test the GPS data. Therefore, even if there is no difference between the speeds, if the azimuth that is actually moving is significantly different from the azimuth obtained from the GPS Doppler shift frequency, However, there is a problem that an abnormality in the GPS data cannot be detected.
[0012]
The present invention is to solve such a conventional problem, and it is not necessary to set a reference value for judging abnormality of satellite data such as GPS in advance, and where satellite data cannot be continuously obtained. However, an object of the present invention is to provide a data verification apparatus and a data verification method capable of determining abnormal data and capable of verifying abnormal data irrespective of the upper limit of the moving speed and acceleration of the moving object. Further, the present invention provides a data verification device capable of verifying satellite data even when the difference between the vehicle speed obtained from the Doppler shift frequency of the satellite radio wave received from the satellite and the vehicle speed obtained from the sensor is small. And a method thereof.
[0013]
[Means for Solving the Problems]
In order to solve the above problems, a data verification device of the present invention comprises a navigation signal receiving means for receiving and detecting a navigation signal transmitted by an artificial satellite, and a Doppler shift frequency when the navigation signal receiving means receives the navigation signal. A satellite moving body speed detecting means for detecting a moving speed of the moving body with respect to the artificial satellite from the satellite; a satellite moving body speed error estimating means for estimating an error of the satellite moving body speed detected by the satellite moving body speed detecting means; Moving body moving speed detecting means for detecting a moving speed of the body by a sensor mounted on the moving body; and moving body moving speed error estimating for estimating an error included in the moving body moving speed detected by the moving body moving speed detecting means. Means, and a difference between the satellite moving body speed detected by the satellite moving body speed detecting means and the moving body moving speed detected by the moving body moving speed detecting means is the satellite moving speed. Speed determining means for determining whether the difference is larger than the sum of the satellite moving body speed error estimated by the speed error estimating means and the moving body moving speed error estimated by the moving body moving speed error estimating means. I do. With this configuration, if the difference between the detected satellite moving object speed and the moving object moving speed is larger than the sum of the estimated satellite moving object speed error and the moving object moving speed error, the satellite data is determined to be invalid. The satellite data can be verified without setting a reference value for judging abnormality of the satellite data in advance. Further, since it is not necessary to continuously receive the satellite signal a predetermined number of times, the satellite data can be verified even in a place where the continuous reception of the satellite signal is difficult.
[0014]
Further, the data verification device of the present invention includes a navigation signal receiving means for receiving and detecting a navigation signal transmitted by an artificial satellite, and a movement with respect to the artificial satellite from a Doppler shift frequency when the navigation signal receiving means receives the navigation signal. Satellite moving body direction detecting means for detecting the direction of the body, satellite moving body direction error estimating means for estimating the error of the satellite moving body direction detected by the satellite moving body direction detecting means, and Moving body relative azimuth detecting means for detecting the azimuth change amount of the moving body by a sensor mounted on the moving body, and a moving body for estimating an error included in the azimuth change amount for a predetermined time detected by the moving body relative azimuth detecting means A relative azimuth error estimating means, and a difference between a moving body azimuth for a certain time detected by the satellite moving body azimuth detecting means and a difference between a certain time detected by the moving body relative azimuth detecting means. Whether the difference from the difference of the position change amount is larger than the sum of the moving body azimuth error estimated by the satellite moving body azimuth error estimating means and the moving body relative azimuth error estimated by the moving body relative azimuth error estimating means. Azimuth change amount determining means for determining. According to this configuration, when the difference between the detected difference in the heading direction and the difference in the heading change amount during a certain period of time is larger than the sum of the estimated moving heading error and the moving head relative heading error, the satellite data Is invalidated, the satellite data can be verified without setting a reference value for judging abnormality of the satellite data in advance. Further, since it is not necessary to continuously receive the satellite signal a predetermined number of times, the satellite data can be verified even in a place where the continuous reception of the satellite signal is difficult. Furthermore, even if the difference between the moving object speed based on the satellite signal and the moving object speed based on the sensor is within an allowable range due to the low moving speed of the moving object, the magnitude of the azimuth change amount of the moving object is compared. As a result, verification of satellite data can be realized.
[0015]
Further, the data verification device of the present invention includes a navigation signal receiving means for receiving and detecting a navigation signal transmitted by an artificial satellite, and a mobile unit using the navigation signal received by the navigation signal receiving means and the propagation time of the navigation signal. Moving body absolute position detecting means for detecting the absolute position of the moving body; moving body absolute position error estimating means for estimating the absolute position error detected by the moving body absolute position detecting means; Moving body relative displacement detecting means for detecting an amount by a sensor mounted on the moving body; moving body relative displacement error estimating means for estimating an error of the moving body moving amount detected by the moving body relative displacement detecting means; The difference between the distance between the absolute positions during the fixed time detected by the body absolute position detecting means and the moving amount of the moving body during the fixed time detected by the moving body relative displacement detecting means is the moving body absolute position error estimation. Stage is characterized in that a displacement amount determination means for determining whether greater than the sum of the moving body relative displacement error absolute position error between said moving body relative displacement error estimating means estimates the estimated. With this configuration, the satellite data is invalidated when the difference between the distance between the absolute positions and the moving amount of the moving body during the detected time is larger than the sum of the estimated absolute position error and the moving body relative displacement error. Therefore, the satellite data can be verified without setting a reference value for determining the abnormality of the satellite data in advance. Further, since it is not necessary to continuously receive the satellite signal a predetermined number of times, the satellite data can be verified even in a place where the continuous reception of the satellite signal is difficult. Furthermore, even when the difference between the moving object speed based on the satellite signal and the moving object speed based on the sensor is within an allowable range because the moving speed of the moving object is small, by comparing the magnitude of the displacement amount of the moving object, In addition, verification of satellite data can be realized.
[0016]
Further, the data verification device of the present invention includes a navigation signal receiving means for receiving and detecting a navigation signal transmitted by an artificial satellite, and a mobile unit using the navigation signal received by the navigation signal receiving means and the propagation time of the navigation signal. Moving body absolute position detecting means for detecting the absolute position of the moving object, moving body absolute position error estimating means for estimating the error of the absolute position detected by the moving body absolute position detecting means, and the navigation signal receiving means Satellite moving body direction detecting means for detecting the direction of the moving body with respect to the artificial satellite from the Doppler shift frequency at the time of reception; and satellite moving body direction error for estimating an error of the moving body direction detected by the satellite moving body direction detecting means. Estimating means, moving body relative displacement detecting means for detecting a moving amount of the moving body during a predetermined time by a sensor mounted on the moving body, and moving body relative displacement detecting means Moving body relative displacement error estimating means for estimating an error of the detected moving amount of the moving body; and moving body absolute moving direction calculating means for calculating an absolute direction of the moving direction of the moving body from a difference between the absolute positions detected by the absolute position detecting means. Means, using the absolute position detected by the moving body absolute position detecting means and the absolute position error estimated by the moving body absolute position error estimating means, included in the absolute direction calculated by the moving body absolute moving direction calculating means. A moving body absolute moving direction error estimating means for estimating an error to be detected, and a moving body moving amount detected by the satellite moving body direction detecting means and the moving amount of the moving body detected by the moving body relative displacement detecting means. Moving body moving direction calculating means for calculating a moving direction, a moving body direction error estimated by the satellite moving body direction error estimating means, and a moving body relative displacement estimated by the moving body relative displacement error estimating means. Using the difference, a moving body moving direction error estimating means for calculating an error included in the moving direction calculated by the moving body moving direction calculating means, and a predetermined time calculated by the moving body absolute moving direction calculating means. The absolute value of the difference between the absolute moving direction and the moving direction of the moving object during the fixed time calculated by the moving object moving direction calculating means is the moving object absolute moving direction error estimated by the moving object absolute moving direction error estimating means and the moving object absolute moving direction error. And a displacement direction judging means for judging whether or not the sum is larger than a sum of the moving object moving direction error estimated by the moving object moving direction error estimating means. With this configuration, if the absolute value of the difference between the calculated absolute moving direction and the moving direction of the moving object during the predetermined time is larger than the sum of the estimated moving object absolute moving direction error and the moving object moving direction error, the satellite Since the data is determined to be invalid, the satellite data can be verified without setting a reference value for determining abnormality of the satellite data in advance. Further, since it is not necessary to continuously receive the satellite signal a predetermined number of times, the satellite data can be verified even in a place where the continuous reception of the satellite signal is difficult. Furthermore, even when the difference between the moving object speed based on the satellite signal and the moving object speed based on the sensor is within an allowable range due to the low moving speed of the moving object, the displacement direction of the moving object is compared to obtain the satellite data. An assay can be realized.
[0017]
Further, the data verification device of the present invention includes a navigation signal receiving means for receiving and detecting a navigation signal transmitted by an artificial satellite, and a mobile unit using the navigation signal received by the navigation signal receiving means and the propagation time of the navigation signal. Moving body absolute position detecting means for detecting the absolute position of the moving body absolute position error estimating means for estimating the error of the absolute position detected by the moving body absolute position detecting means, Accumulating means for accumulating the estimated moving object absolute position error for a certain period of time; and a satellite movement detecting a direction of the moving object with respect to the artificial satellite from a Doppler shift frequency when the navigation signal receiving means receives the navigation signal. Body azimuth detecting means, satellite moving body azimuth error estimating means for estimating an error of the satellite moving body azimuth detected by the satellite moving body azimuth detecting means, and Moving body relative displacement detecting means for detecting the moving amount of the moving body by a sensor mounted on the moving body, moving body relative displacement error estimating means for estimating an error of the moving body moving amount detected by the moving body relative displacement detecting means, Using the satellite mobile direction detected by the satellite mobile direction detecting means and the mobile relative direction detected by the mobile relative displacement detecting means, the moving direction and the moving distance of the mobile are calculated, and the autonomous moving vector is calculated. The mobile body independent movement vector generating means for generating, using the satellite moving body azimuth error estimated by the satellite moving body azimuth error estimating means and the moving body relative displacement error estimated by the moving body relative displacement error estimating means, A moving body self-sustained movement vector error estimating means for estimating errors included in the moving azimuth and the moving distance of the self-sustained moving vector, respectively; The moving body absolute position detecting means detects a moving body absolute position in the past by a time, and calculates a position translated in parallel by the autonomous moving vector calculated by the moving body independent moving vector calculating means, and the moving body absolute position detecting means. The distance between the latest moving body absolute position calculated and the position after the parallel movement calculated by the parallel movement position calculating means is the error included in the latest moving body absolute position estimated by the moving body absolute position error estimating means and the error. Whether or not the sum of the error included in the absolute position of the moving body in the past and the error included in the azimuth and distance of the independent moving vector estimated by the moving object independent movement vector error estimating means for a certain period of time accumulated by the storage means And a vector determining means for determining With this configuration, the distance between the detected latest moving object absolute position and the position after the parallel movement is included in the past moving object absolute position for a predetermined time accumulated and the error included in the estimated latest moving object absolute position. When the error is larger than the sum of the error and the error included in the azimuth and distance of the estimated autonomous movement vector, the satellite data is determined to be invalid. Therefore, a reference value for determining an abnormality in the satellite data is not set in advance. Then, the satellite data can be verified. Further, since it is not necessary to continuously receive the satellite signal a predetermined number of times, the satellite data can be verified even in a place where the continuous reception of the satellite signal is difficult. Furthermore, even if the difference between the moving object speed based on the satellite signal and the moving object speed based on the sensor is within an allowable range due to the low moving speed of the moving object, the moving vector of the moving object is compared to obtain the satellite data. An assay can be realized.
[0018]
Further, the data verification method of the present invention is a step of receiving and detecting a navigation signal transmitted by an artificial satellite, and a step of detecting a speed of a mobile object with respect to the artificial satellite from a Doppler shift frequency when the navigation signal is received, Estimating the error of the detected satellite moving object speed, detecting the moving speed of the moving object by a sensor mounted on the moving object, and estimating the error included in the detected moving object moving speed. And determining whether the difference between the detected satellite moving object speed and the moving object moving speed is larger than the sum of the estimated satellite moving object speed error and the moving object moving speed error. Features. By this processing, if the difference between the detected satellite moving object speed and the moving object moving speed is larger than the sum of the estimated satellite moving object speed error and the moving object moving speed error, the satellite data is determined to be invalid. The satellite data can be verified without setting a reference value for judging abnormality of the satellite data in advance. Further, since it is not necessary to continuously receive the satellite signal a predetermined number of times, the satellite data can be verified even in a place where the continuous reception of the satellite signal is difficult.
[0019]
Further, the data verification method of the present invention is a step of receiving and detecting a navigation signal transmitted by an artificial satellite, and a step of detecting an orientation of a moving object with respect to the artificial satellite from a Doppler shift frequency when the navigation signal is received, Estimating the error of the detected azimuth of the moving object of the satellite, detecting an amount of change in azimuth of the moving object during a predetermined time by a sensor mounted on the moving object, and detecting the azimuth during the detected fixed time. The step of estimating the error included in the change amount, and the difference between the difference between the detected moving body direction and the difference in the direction change amount during the detected fixed time is the estimated moving body direction error and the moving body relative direction error. Determining whether the sum is greater than the sum of By this processing, if the difference between the detected difference in the direction of the moving object and the difference in the amount of change in the direction during the detected period of time is larger than the sum of the estimated error of the moving object direction and the relative error of the moving object, the satellite data Is invalidated, the satellite data can be verified without setting a reference value for judging abnormality of the satellite data in advance. Further, since it is not necessary to continuously receive the satellite signal a predetermined number of times, the satellite data can be verified even in a place where the continuous reception of the satellite signal is difficult. Furthermore, even if the difference between the moving object speed based on the satellite signal and the moving object speed based on the sensor is within an allowable range due to the low moving speed of the moving object, the magnitude of the azimuth change amount of the moving object is compared. As a result, verification of satellite data can be realized.
Further, the data verification method of the present invention includes a step of receiving and detecting a navigation signal transmitted by an artificial satellite, and a step of detecting an absolute position of a moving object using the received navigation signal and its propagation time. Estimating an error of the detected absolute position, detecting a movement amount of the moving body during a predetermined time by a sensor mounted on the moving body, and estimating the error of the detected moving body movement amount. Determining whether the difference between the distance between the absolute positions and the moving amount of the moving object during the detected fixed time is greater than the sum of the estimated absolute position error and the moving object relative displacement error. And characterized in that: With this configuration, the satellite data is invalidated when the difference between the distance between the absolute positions and the moving amount of the moving body during the detected time is larger than the sum of the estimated absolute position error and the moving body relative displacement error. Therefore, the satellite data can be verified without setting a reference value for determining the abnormality of the satellite data in advance. Further, since it is not necessary to continuously receive the satellite signal a predetermined number of times, the satellite data can be verified even in a place where the continuous reception of the satellite signal is difficult. Furthermore, even when the difference between the moving object speed based on the satellite signal and the moving object speed based on the sensor is within an allowable range because the moving speed of the moving object is small, by comparing the magnitude of the displacement amount of the moving object, In addition, verification of satellite data can be realized.
[0021]
Further, the data verification method of the present invention includes a step of receiving and detecting a navigation signal transmitted by an artificial satellite; a step of detecting an absolute position of a moving object by using the received navigation signal and a propagation time thereof; Estimating the error of the absolute position, detecting the azimuth of the mobile with respect to the satellite from the Doppler shift frequency when receiving the navigation signal, and estimating the error of the detected azimuth of the mobile. Detecting a moving amount of the moving body during a predetermined time by a sensor mounted on the moving body, estimating an error of the detected moving body moving amount, and moving the moving body from a difference between the detected absolute positions. Calculating the absolute azimuth of the moving direction of the body, and using the detected absolute position and the estimated absolute position error to calculate the absolute azimuth. Estimating the error of the moving object, calculating the moving direction of the moving object using the detected moving object direction and the moving amount of the moving object, and calculating the estimated moving object direction error and the moving object relative displacement error. Calculating the error included in the calculated moving azimuth, and calculating the absolute absolute difference between the absolute moving azimuth and the moving body moving azimuth during the calculated fixed time, using the estimated moving body absolute moving azimuth error. And determining whether the difference is larger than the sum of the moving body moving direction error and the moving body moving direction error. With this configuration, if the absolute value of the difference between the calculated absolute moving direction and the moving direction of the moving object during the predetermined time is larger than the sum of the estimated moving object absolute moving direction error and the moving object moving direction error, the satellite Since the data is determined to be invalid, the satellite data can be verified without setting a reference value for determining abnormality of the satellite data in advance. Further, since it is not necessary to continuously receive the satellite signal a predetermined number of times, the satellite data can be verified even in a place where the continuous reception of the satellite signal is difficult. Furthermore, even when the difference between the moving object speed based on the satellite signal and the moving object speed based on the sensor is within an allowable range due to the low moving speed of the moving object, the displacement direction of the moving object is compared to obtain the satellite data. An assay can be realized.
[0022]
Further, the data verification method of the present invention includes a step of receiving and detecting a navigation signal transmitted by an artificial satellite; a step of detecting an absolute position of a moving object by using the received navigation signal and a propagation time thereof; Estimating the absolute position error obtained, accumulating the detected moving object absolute position and the estimated moving object absolute position error for a certain period of time, and a Doppler shift frequency when receiving the navigation signal. Detecting the azimuth of the moving object with respect to the artificial satellite from the step of estimating an error of the detected azimuth of the moving object, and a sensor mounted on the moving object for a moving amount of the moving object during a predetermined time. Detecting, and estimating the error of the detected moving amount of the moving body, using the detected satellite moving body direction and moving body relative direction, Calculating the moving azimuth and moving distance of the moving object to generate an independent moving vector, and using the estimated satellite moving body azimuth error and the moving object relative displacement error, to calculate the moving azimuth and moving distance of the independent moving vector. Estimating the error included in each of the following, calculating the absolute position of the moving body in the past for the accumulated time, and calculating the position translated in parallel by the calculated independent movement vector, The distance between the moving body absolute position and the calculated position after the parallel movement is the error included in the estimated latest moving body absolute position and the error included in the moving body absolute position in the past for the accumulated period of time and Vector determining means for determining whether or not the sum of the error and the error included in the azimuth and distance of the estimated independent movement vector is greater than And it said that there were pictures. With this processing, the distance between the detected latest moving body absolute position and the position after the parallel movement is included in the error included in the estimated latest moving body absolute position and the accumulated moving body absolute position in the past for a fixed period of time. When the error is larger than the sum of the error and the error included in the azimuth and distance of the estimated autonomous movement vector, the satellite data is determined to be invalid. Therefore, a reference value for determining an abnormality in the satellite data is not set in advance. Then, the satellite data can be verified. Further, since it is not necessary to continuously receive the satellite signal a predetermined number of times, the satellite data can be verified even in a place where the continuous reception of the satellite signal is difficult. Furthermore, even if the difference between the moving object speed based on the satellite signal and the moving object speed based on the sensor is within an allowable range due to the low moving speed of the moving object, the moving vector of the moving object is compared to obtain the satellite data. An assay can be realized.
[0023]
Further, the present invention is a control program in which the above-mentioned data verification method is described in a computer-readable format. By installing this control program, the present invention can be realized using a computer.
[0024]
Further, the present invention is a recording medium in which the above-described control program is recorded in a computer-readable format, and by using this recording medium, the present invention can be realized by a computer mounted on a moving body or the like.
[0025]
BEST MODE FOR CARRYING OUT THE INVENTION
Hereinafter, embodiments of the present invention will be described with reference to the drawings.
(Embodiment 1)
FIG. 1 shows the configuration of a GPS data verification device according to the first embodiment of the present invention. The first embodiment of the present invention compares the speed obtained by Doppler shift of a signal from a GPS satellite with the speed obtained by a rotation sensor or a non-contact type sensor for measuring the number of rotations of a wheel, and verifies GPS data. Is what you do. In FIG. 1, a GPS receiving means 101 as a navigation signal receiving means receives and detects a transmission signal from a GPS satellite. The GPS moving object speed detecting means 102 calculates the moving speed of the moving object with respect to the GPS satellites (GPS moving object speed) from the Doppler shift when the GPS signal is received. The GPS moving body speed error estimating means 103 calculates an error included in the GPS moving body speed according to an index indicating positioning accuracy such as the arrangement status of a satellite being received, and uses a DOP (Delution) as an accuracy index. Of Precision) value or the like is used. The GPS moving body speed error estimating means 103 reduces the estimation error of the GPS moving body speed as the DOP value decreases. The moving body moving speed detecting means 104 detects the moving speed of the moving body (moving body moving speed) using a sensor mounted on the moving body. In the case of a moving object having wheels, the moving speed of the moving object can be detected by taking the product of the number of rotations per unit time of the wheel and the outer diameter of the wheel using a rotation sensor attached to the wheel shaft. . As another moving body moving speed detecting means, a sensor that detects the moving body moving speed by a method other than GPS, such as a non-contact type speed sensor, can be used. The moving object moving speed error estimating means 105 estimates an error included in the moving object moving speed detected by the moving object moving speed detection calculating means 104. When the above-mentioned rotation sensor is used, it is possible to estimate the speed error from the resolution of the rotation sensor and the error range of the wheel outer diameter. The speed determining means 106 estimates the difference between the moving object speed detected by the GPS moving object speed detecting means 102 and the moving object moving speed detected by the moving object moving speed detecting means 104 by the GPS moving object speed error estimating means 103. If the sum of the GPS moving body speed error and the moving body moving speed error estimated by the moving body moving speed error estimating means 105 is larger, it is determined that the corresponding GPS data is invalid.
[0026]
FIG. 2 is a flowchart illustrating the operation of the GPS data verification device according to the first embodiment. In FIG. 2, in step 201, the receiving state of the GPS signal in the GPS receiving means 101 is determined. If the mobile body speed can be calculated, the process proceeds to step 202. If the mobile body speed cannot be calculated, the process proceeds to step 202. Step 207 is performed. In step 202, the moving speed of the moving object is calculated by the GPS moving object speed detecting means 102. In step 203, the GPS moving body speed error estimating means 103 estimates the moving body speed error. In step 204, the moving body moving speed is detected by the moving body moving speed detecting means 104. In step 205, an error included in the moving speed of the moving object detected in step 204 is estimated. In step 206, the absolute value of the difference between the moving body speed and the moving body moving speed, the moving body speed error estimated by the GPS moving body speed error estimating means 103, and the moving body moving speed error estimating means 105 are calculated by the speed judging means 106. Is compared with the estimated sum of the moving body moving speed errors, and if the difference absolute value between the moving body speed and the moving body moving speed is large, the process proceeds to step 207; otherwise, the process of step 208 is performed. In step 207, the determination status is set so that the GPS data becomes invalid. In step 208, the determination status is set so that the GPS data becomes valid. In step 209, the state of the determination status set in step 207 or step 208 is output to the outside.
[0027]
As described above, according to the first embodiment, the speed of the moving object obtained by the Doppler shift of the signal from the GPS satellite, and the speed of the moving object obtained by the rotation sensor or the non-contact type sensor that measures the number of rotations of the wheels. If the difference between the moving object speed and the moving object moving speed is larger than the sum of the moving object speed error and the moving object moving speed error, the corresponding GPS data is determined to be invalid. Therefore, the GPS data can be tested without setting a reference value for detecting an abnormality in the GPS data in advance. Further, since it is not necessary to continuously receive the GPS signal a predetermined number of times, even in a place where it is difficult to continuously receive the GPS signal, the GPS data can be verified by comparing the moving speeds of the moving objects. it can.
[0028]
(Embodiment 2)
FIG. 3 shows the configuration of the GPS data verification device according to the second embodiment of the present invention. In the second embodiment of the present invention, a change amount of a traveling azimuth of a moving object with respect to a GPS satellite obtained by a Doppler shift frequency of a signal from a GPS satellite and a change of a relative azimuth of the moving object obtained by a gyro sensor, a geomagnetic azimuth sensor, and the like are described. The GPS data is tested by comparing the amount. In FIG. 3, a GPS signal receiving means 301 serving as a navigation signal receiving means receives and detects a transmission signal from a GPS satellite. The GPS moving body azimuth detecting means 302 calculates the azimuth of the moving body with respect to the GPS satellite from the Doppler shift frequency when the GPS signal is received. The GPS moving body azimuth error estimating means 303 estimates an error included in the GPS moving body azimuth according to the moving speed and the errors included in the Doppler shift frequency. The moving body relative azimuth detecting means 304 calculates the relative azimuth of the moving body by integrating the output of the angular velocity sensor mounted on the moving body or by using a geomagnetic azimuth sensor. As the angular velocity sensor, an optical fiber gyro sensor, a vibration gyro sensor, or the like can be used. The moving body relative direction error estimating means 305 estimates an error included in the moving body relative direction detected by the moving body relative direction detecting means 304. The error included in the relative azimuth of the moving object can be estimated in consideration of the zero point fluctuation error of the sensor, the error of the scale factor, the influence of the angular velocity caused by the rotation of the earth, and the like. The azimuth change amount determination means 306 determines whether the difference between the GPS mobile body azimuth detected by the GPS mobile body azimuth detecting means 302 at a certain time t1 in the past and the current time t2 and the relative azimuth detecting means 304 between the times t1 and t2. The absolute value of the difference between the difference between the relative azimuth change amounts detected during that time is the GPS mobile azimuth error estimated by the GPS mobile azimuth error estimation means 303 and the mobile relative azimuth error estimated by the mobile relative azimuth error estimation means 305. And if the absolute value of the difference exceeds the sum of the GPS moving body azimuth error and the moving body relative azimuth error, the latest GPS data is determined to be invalid.
[0029]
FIG. 4 shows an example of a method for estimating the azimuth error of GPS data in the GPS moving body azimuth error estimating means 303. The true moving speed 401 is a speed vector that represents the magnitude and direction of the true moving speed of the moving object. 0 And The GPS moving object speed error circle 402 represents a range of variation of the moving object speed detected by the GPS Doppler shift. err And The angle θ formed by the tangent from the speed vector base point of the true speed 401 to the GPS moving object speed error circle 402 and the true speed 401 max Is the GPS moving body azimuth error range 403.
[0030]
FIG. 5 is a flowchart illustrating the operation of the GPS data verification device according to the second embodiment. In FIG. 5, in step 501, the GPS signal receiving state of the GPS receiving means 301 is determined, and if the GPS moving direction of the moving object can be calculated, the process proceeds to step 502. If it is, the process of step 507 is performed. In step 502, the GPS moving body azimuth detecting means 302 calculates the GPS moving body azimuth which is the running azimuth of the moving body with respect to the GPS satellite. In step 503, the GPS moving body direction error estimating means 303 estimates the GPS moving body direction error. In step 504, the relative moving direction of the moving object is detected by the moving object relative direction detecting means 304. In step 505, an error included in the relative orientation of the moving object detected in step 504 is estimated. In step 506, the azimuth change amount determination means 306 determines the absolute value of the difference between the GPS mobile body azimuth change amount and the mobile body relative azimuth change amount at different times t1 and t2, the GPS mobile body azimuth error, and the mobile body relative azimuth error. If the absolute value of the difference between the GPS mobile object azimuth change amount and the mobile object relative azimuth change amount is larger, the process of step 507 is performed. Otherwise, the process of step 508 is performed. In step 507, the determination status is set so that the GPS data becomes invalid. In step 508, the determination status is set so that the GPS data becomes valid. In step 509, the status of the determination status set in step 507 or 508 is output to the outside.
[0031]
As described above, according to the second embodiment, the GPS moving body direction, which is the running direction of the moving body obtained by the Doppler shift of the signal from the GPS satellite, and the angular velocity sensor or the geomagnetic direction sensor mounted on the moving body. The obtained relative azimuth of the moving object is compared, and when the difference value between the GPS moving object azimuth and the moving object relative azimuth becomes larger than the sum of the GPS moving object azimuth error and the moving object relative azimuth error, the corresponding Since the GPS data is determined to be invalid, the GPS data can be tested without setting a reference value for detecting an abnormality in the GPS data in advance. Further, since it is not necessary to continuously receive the GPS signal a predetermined number of times, it is possible to test the GPS data even in a place where it is difficult to continuously receive the GPS signal. Further, even when the difference between the moving object speed based on the GPS signal and the moving object relative speed based on the vehicle speed sensor and the like in the first embodiment is within the allowable range because the moving speed of the moving object is low, By comparing the azimuth change amounts, the verification of the GPS data can be realized.
[0032]
(Embodiment 3)
FIG. 6 shows the configuration of the GPS data verification device according to the third embodiment of the present invention. The third embodiment of the present invention compares the moving distance of the moving object at different times obtained from the signals of the GPS satellites with the moving distance of the moving object calculated by the inertial navigation to test the GPS data. is there. In FIG. 6, a GPS receiving means 601 as a navigation signal receiving means receives and detects a transmission signal from a GPS satellite. The moving body absolute position detecting means 602 detects the absolute position of the moving body based on the principle of triangulation using the coordinate information of the GPS satellite obtained by demodulating the navigation signal from the GPS satellite and the propagation time of the GPS signal. The moving body absolute position error estimating means 603 estimates the error included in the absolute position of the moving body detected by the moving body absolute position detecting means 602, and is included in the DOP, GPS signal strength, and navigation signal representing the satellite arrangement relationship. Error estimation is performed using the ionospheric delay information and the like. The moving body relative displacement detecting means 604 detects the moving distance of the moving body by combining a distance sensor and a relative azimuth sensor mounted on the moving body. As the distance sensor, a rotation sensor attached to a wheel or a non-contact Time integration of the speed obtained by the type sensor is used, and as the relative direction sensor, an angular velocity sensor such as an optical fiber gyro sensor or a vibration gyro sensor, or a geomagnetic direction sensor can be used. The moving body relative displacement error estimating means 605 estimates an error included in the moving body relative displacement detected by the moving body relative displacement detecting means 604, and calculates a moving body relative displacement error by combining the distance error component and the azimuth error component. I do. The displacement amount determination means 606 determines the difference distance between the absolute position of the moving object detected by the moving object absolute position detection means 602 at a certain time t1 in the past and the current time t2, and the relative displacement detection means 604 of the moving object from time tl. The absolute value of the difference between the relative displacement of the moving object and the difference of the relative displacement of the moving object detected during t2 is the moving object absolute position error estimated by the moving object absolute position error estimating means 603 and the moving object estimated by the moving object relative displacement error estimating means 605. Determine whether the difference is greater than the sum of the relative displacement and the difference absolute value between the difference distance between the moving body absolute positions and the moving body relative displacement exceeds the sum of the estimated moving body absolute position error and the moving body relative displacement. In this case, the latest GPS data is determined to be invalid.
[0033]
Next, a method of estimating an error included in a difference distance between absolute positions from a moving object absolute position error estimated by the moving object absolute position error estimating means 603 according to the third embodiment will be described with reference to FIG. In FIG. 7, the absolute position P at time t1 1 Moving body absolute position error 701 and the absolute position P at time t2 2 Is actually not necessarily the radius r as shown in the figure. 1 , R 2 Is not necessarily a perfect circle, but it is assumed to be a perfect circle for the sake of simplicity. The absolute position difference distance 703 is the absolute position P 1 And absolute position P 2 And the maximum absolute position difference distance 704 is the absolute position P 1 And absolute position P 2 Represents the distance when the error included in the absolute position difference distance 703 is the largest and the error included in the absolute position difference distance 703 is the largest. At this time, the error included in the maximum absolute position difference distance 704 is represented by the sum of the moving body absolute position error 701 and the moving body absolute position error 702.
[0034]
Next, a method of calculating the relative displacement error of the moving object estimated by the moving object relative displacement error estimating means 604 according to the third embodiment will be described with reference to FIG. In FIG. 8, the moving body relative displacement 801 is the absolute position P 1 And absolute position P 2 The moving body relative displacement 802 is a moving body relative displacement detected when the moving body relative displacement detecting means 604 includes a distance error, and is a moving body relative displacement 803. Represents the relative displacement of the moving body detected when the moving body relative displacement detecting means 604 includes the moving body azimuth error. The distance error 804 and the distance error 805 are distance errors included in the moving body relative displacement 802 and the moving body relative displacement 803. The distance error 804 is an error such as the resolution of the wheel rotation sensor or the wheel outer diameter. It can be calculated geometrically using the azimuth error and the moving distance caused by the sensor. The moving body relative displacement error estimating means 605 estimates the moving body relative displacement error based on the sum or the sum of squares of the distance error 804 and the distance error 805.
[0035]
FIG. 9 is a flowchart illustrating the operation of the GPS data verification device according to the third embodiment. In FIG. 9, in step 901, the receiving state of the GPS signal in the GPS receiving means 601 is determined. If the absolute position can be detected, the process proceeds to step 902. If the absolute position cannot be detected, the process proceeds to step 902. 907. In step 902, the absolute position is detected by the moving body absolute position detecting means 602. In step 903, the moving body absolute position error estimating means 603 estimates the absolute position error. In step 904, the moving distance of the moving body is detected by the moving body relative displacement detecting means 604. In step 905, an error included in the relative displacement of the moving object detected in step 904 is estimated. In step 906, the displacement amount determination means 605 calculates the sum of the absolute value of the difference between the moving object absolute position difference and the moving object relative displacement at different times t1 and t2, and the sum of the moving object absolute position error and the moving object relative displacement error. In comparison, if the absolute value of the difference between the position difference distance and the relative displacement of the moving object is larger, the processing of step 907 is performed; otherwise, the processing of step 908 is performed. In step 907, the determination status is set so that the GPS data becomes invalid. In step 908, the determination status is set so that the GPS data becomes valid. In step 909, the state of the determination status set in step 907 or 908 is output to the outside.
[0036]
As described above, according to the third embodiment, the distance between the absolute positions of the moving object at different times obtained from the signals of the GPS satellites, and the relative displacement of the moving object obtained by the distance sensor and the direction sensor mounted on the moving object If the difference value between the absolute distance between the moving object and the relative displacement of the moving object is larger than the sum of the absolute position error of the moving object and the relative displacement error of the moving object, the corresponding GPS data is calculated. Since it is determined that the GPS data is invalid, the GPS data can be tested without setting a reference value for detecting an abnormality in the GPS data in advance. Further, since it is not necessary to continuously receive the GPS signal a predetermined number of times, it is possible to test the GPS data even in a place where it is difficult to continuously receive the GPS signal. Furthermore, even when the difference between the moving object speed based on the GPS signal and the moving object speed based on the vehicle speed sensor in the first embodiment is within an allowable range because the moving speed of the moving object is small, the displacement amount of the moving object is By performing the comparison, the test of the GPS data can be realized.
[0037]
In the third embodiment, the case has been described where the error range estimated by the moving object absolute position error estimating means 603 is uniformly distributed in a perfect circle, but the actual error range distribution may be elliptical. Because it is possible, the moving body absolute position error estimating means 603 may change the moving body absolute position error to be estimated according to the azimuth.
[0038]
(Embodiment 4)
FIG. 10 shows the configuration of the GPS data verification device according to the fourth embodiment of the present invention. Embodiment 4 of the present invention compares the absolute azimuth of the moving object obtained from the absolute position difference of the moving object of the GPS with the azimuth of the moving object calculated by combining the inertial navigation and the GPS azimuth. A test is performed. In FIG. 10, a GPS receiving means 1001 as a navigation signal receiving means receives and detects a transmission signal from a GPS satellite. The moving body absolute position detecting means 1002 detects the moving body absolute position based on the principle of triangulation using the coordinate information of the GPS satellite obtained by demodulating the navigation signal from the GPS satellite and the propagation time of the GPS signal. The moving body absolute position error estimating means 1003 estimates an error included in the moving body absolute position detected by the moving body absolute position detecting means 1002, and is included in a DOP, a GPS signal strength, and a navigation signal indicating a satellite arrangement relationship. Error estimation is performed using the ionospheric delay information and the like. The GPS moving body azimuth detecting means 1004 calculates the azimuth of the moving body with respect to the GPS satellite from the Doppler shift frequency when the GPS signal is received. The GPS moving body azimuth error estimating means 1005 estimates an error contained in the GPS moving body azimuth according to the moving speed and the errors contained in the Doppler shift frequency. The moving body relative displacement detecting means 1006 detects the moving distance of the moving body by combining a distance sensor and a relative azimuth sensor mounted on the moving body. As the distance sensor, a rotation sensor attached to a wheel or a non-contact Time integration of the speed obtained by the type sensor is used, and as the relative direction sensor, an angular velocity sensor such as an optical fiber gyro sensor or a vibration gyro sensor, or a geomagnetic direction sensor can be used. The moving body relative displacement error estimating means 1007 estimates an error included in the moving body relative displacement detected by the moving body relative displacement detecting means 1006, and calculates a moving body relative displacement error by combining the distance error component and the azimuth error component. I do. The moving body absolute movement azimuth calculating means 1008 calculates the absolute azimuth in the moving direction from the difference between the moving body absolute positions calculated by the moving body absolute position detecting means 1002. The moving body absolute moving direction error estimating means 1009 uses the moving body absolute position error estimating means 1003 and the moving body absolute position error estimating means 1003 to calculate the moving body absolute moving direction calculating means 1008. An error included in the calculated absolute direction is estimated. The moving body moving direction calculating means 1010 calculates the moving direction of the moving body using the moving body direction calculated by the GPS moving body direction detecting means 1004 and the relative displacement of the moving body calculated by the moving body relative displacement detecting means 1006. . The moving body moving direction error estimating means 1011 uses the GPS moving body direction error estimated by the GPS moving body direction error estimating means 1005 and the moving body relative displacement error estimated by the moving body relative displacement error estimating means 1007 to move the moving body. An error included in the moving body moving direction calculated by the direction calculating means 1010 is estimated. The displacement direction determining means 1012 calculates the absolute difference between the absolute moving direction calculated by the moving body absolute moving direction calculating means 1008 and the moving body moving direction calculated by the moving body moving direction calculating means 1010 as the moving body absolute moving direction error estimating means. It is determined whether the absolute movement azimuth error estimated by the moving body 1009 and the moving body azimuth error estimated by the moving body movement azimuth error estimating means 1011 are greater than the sum of the absolute movement azimuth error calculated by the moving body absolute movement azimuth calculating means 1008. The absolute value of the difference between the heading and the moving body moving direction calculated by the moving body moving direction calculating means 1010 is estimated by the absolute moving direction error estimated by the moving body absolute moving direction error estimating means 1009 and the moving body moving direction error estimating means 1011. If the sum exceeds the moving direction error, it is determined that the latest GPS data is invalid.
[0039]
Next, an error estimating method of the moving object absolute moving direction error estimating means 1009 in the fourth embodiment will be described with reference to FIG. In FIG. 11, the moving object absolute position difference vector 1101 is a two-point P at different times t1 and t2 detected by the moving object absolute position detecting means 1002. 1 , P 2 Are absolute position difference vectors, and the moving body absolute position errors 1102 and 1103 are two points P 1 , P 2 Represents the absolute position error estimated by the moving body absolute position error estimating means 1003 at the moving body absolute position. At this time, the maximum azimuth error 1104 included in the moving object absolute position difference vector 1101 is geometrically calculated using the length of the moving object absolute position difference vector 1101 and the moving object absolute position errors 1102 and 1103, respectively. be able to. The azimuth error 1104 decreases as the distance of the moving object absolute position difference vector 1101 increases.
[0040]
Next, a moving direction calculating method according to the fourth embodiment will be described with reference to FIG. In FIG. 12, the moving object relative direction 1201 is the relative direction estimated by the moving object relative displacement detecting means 1006, and the GPS moving object direction 1202 is the moving object detected by the GPS moving object direction detecting means 1004 at the same time as the relative direction 1201. It is the direction of. The moving body moving direction 1203 is the moving body moving direction calculated by the moving body moving direction calculating unit 1010. The difference between the mobile object relative azimuth 1201 and the GPS mobile object azimuth 1202 is kept almost constant if the error of the relative azimuth sensor is small. Accordingly, by taking a time-series average of the difference between the mobile relative azimuth 1201 and the GPS mobile azimuth 1202, the azimuth offset 1204 of the absolute azimuth with respect to the relative azimuth is calculated, and the azimuth offset 1204 is added to the mobile azimuth 1203. Is added to calculate the moving body moving direction 1205. The moving body moving direction error calculating unit 1011 estimates the moving direction error based on the sum of the error included in the GPS moving body direction 1202 and the error included in the direction offset 1204.
[0041]
FIG. 13 is a flowchart illustrating the operation of the GPS data verification device according to the present embodiment. In FIG. 13, in step 1301, it is determined whether or not both the absolute position detection of the moving object and the detection of the GPS azimuth are possible using GPS. If it is possible, the process proceeds to step 1302; Proceed to. In step 1302, the moving body absolute position detecting means 1002 detects the moving body absolute position. In step 1303, the moving body absolute position error estimating means 1003 estimates an error included in the moving body absolute position detected in step 1302. In step 1304, the GPS moving body direction detecting means 1004 detects the moving body direction obtained by the Doppler shift of the GPS signal. In step 1305, an error included in the GPS moving body direction is estimated according to the error included in the moving speed or the Doppler shift. In step 1306, the relative displacement of the moving body is detected by the moving body relative displacement detecting means 1006. In step 1307, the relative azimuth error detected in step 1306 is estimated by the moving body relative displacement error calculating means 1007. In step 1308, the moving direction of the moving object is calculated by the moving object moving direction calculating means 1010 using the method shown in FIG. In step 1309, an error included in the moving body moving direction is estimated using the moving body absolute position error estimated in step 1303 and the moving body relative direction error estimated in step 1307. In step 1310, two points P detected by the moving body absolute position detecting means 1002 are detected. 1 , P 2 The absolute moving direction of the moving object is detected by the moving object absolute moving direction calculating means 1008 from the difference between the absolute positions of the moving object and the moving object. In step 1311, the error contained in the absolute moving direction is estimated by the moving body absolute moving direction error estimating means 1009 using the method of FIG. In step 1312, the difference between the moving body moving direction calculated in step 1308 and the moving body absolute moving direction calculated in step 1310 is estimated by the displacement direction judging means 1012 and the moving body moving direction error estimated in step 1309 and the moving body moving direction error estimated in step 1311. If the sum exceeds the sum of the absolute azimuth errors of the moving objects, the latest GPS data is determined to be abnormal. In step 1313, the determination status is set so that the GPS data becomes invalid. In step 1314, the determination status is set so that the GPS data becomes valid. In step 1315, the status of the determination status set in step 1313 or 1314 is output to the outside.
[0042]
As described above, according to the fourth embodiment, the absolute moving direction of the moving object at different times based on the GPS is compared with the moving direction of the moving object based on the distance sensor and the direction sensor mounted on the moving object. If the difference value between the absolute moving direction of the body and the moving direction of the moving object is larger than the sum of the absolute moving direction error and the moving object moving direction error, the corresponding GPS data is determined to be invalid. GPS data can be tested without setting in advance a reference value for detecting abnormalities in the GPS data. Further, since it is not necessary to continuously receive the satellite signal a predetermined number of times, the GPS data can be verified even in a place where it is difficult to continuously receive the satellite signal. Furthermore, even when the difference between the moving speed of the moving object based on the satellite signal and the moving speed of the moving object based on the sensor is within an allowable range due to the low moving speed of the moving object, the GPS data can be compared by comparing the displacement directions of the moving object. Can be realized. Furthermore, in the case where the moving speed of the moving object is low, the accuracy of estimating and determining the GPS moving object azimuth estimated by the GPS moving object azimuth error estimating means in the third embodiment is large, so that it is difficult to detect the abnormality of the GPS data. Even in this case, according to the fourth embodiment, the GPS data test can be accurately performed.
[0043]
(Embodiment 5)
FIG. 14 shows the configuration of the GPS data verification device according to the fifth embodiment of the present invention. The fifth embodiment of the present invention compares the position of the mobile object absolute position detected in the past by the time t using the GPS in parallel with the autonomous movement vector and the latest mobile object absolute position. A GPS data test is performed. 14, a GPS signal receiving means 1401 as a navigation signal receiving means receives and detects a transmission signal from a GPS satellite. The moving body absolute position detecting means 1402 detects the moving body absolute position based on the principle of triangulation using the coordinate information of the GPS satellite obtained by demodulating the navigation signal from the GPS satellite and the propagation time of the GPS signal. The moving body absolute position error estimating means 1403 estimates an error included in the moving body absolute position detected by the moving body absolute position detecting means 1402, and is included in a DOP, a GPS signal strength, and a navigation signal indicating a satellite arrangement relationship. Error estimation is performed using the ionospheric delay information and the like. The GPS moving body azimuth detecting means 1404 calculates the azimuth of the moving body with respect to the GPS satellite from the Doppler shift frequency when the GPS signal is received. The GPS moving body azimuth error estimating means 1405 estimates an error contained in the GPS moving body azimuth according to the moving speed and the errors contained in the Doppler shift frequency. The moving body relative displacement detecting means 1406 detects the moving distance of the moving body by combining a distance sensor mounted on the moving body and a relative azimuth sensor. As the distance sensor, a rotation sensor attached to a wheel or a non-contact Time integration of the speed obtained by the type sensor is used, and as the relative direction sensor, an angular velocity sensor such as an optical fiber gyro sensor or a vibration gyro sensor, or a geomagnetic direction sensor can be used. The moving body relative displacement error estimating means 1407 estimates an error included in the moving body relative displacement detected by the moving body relative displacement detecting means 1406, and calculates a moving body relative displacement error by combining the distance error component and the azimuth error component. I do. The accumulating unit 1408 stores the moving body absolute position detected by the moving body absolute position detecting unit 1402 and the moving body absolute position error estimated by the moving body absolute position error estimating unit 1403 from the latest data to the data traced back by the time t. Is temporarily stored. The moving body independent movement vector generating means 1409 uses the GPS direction detected by the GPS moving body direction detecting means 1404 and the moving body relative direction detected by the moving body relative displacement detecting means 1406 to determine the moving direction and moving distance of the moving body. Each is calculated and an independent movement vector is generated. The moving body self-sustained movement vector error calculating means 1410 uses the GPS azimuth error estimated by the GPS moving body azimuth error estimating means 1405 and the moving body relative displacement error estimated by the moving body relative displacement error detecting means 1407 to calculate the independent moving vector. An error included in the moving direction and the distance is estimated. The parallel movement position calculating means 1411 calculates the absolute position of the moving body in the past by the time t accumulated by the accumulating means 1408 and the position translated by the amount of the independent moving vector calculated by the independent moving vector calculating means 1409. I do. The vector determining means 1412 calculates the distance between the latest moving body absolute position detected by the moving body absolute position detecting means 1402 and the position after the parallel movement calculated by the parallel moving position calculating means 1411 as the moving body absolute position error estimating means 1403. , The error included in the latest absolute position of the moving object, the error included in the absolute position of the moving object in the past for the time t accumulated by the accumulating unit 1408, and the independent moving vector estimated by the independent moving vector error estimating unit 1410. It is checked whether or not the sum exceeds an error included in the bearing and the distance to determine whether the GPS data is valid or invalid.
[0044]
Next, a method of comparing the position after the translation in Embodiment 5 with the latest absolute position of the moving object will be described with reference to FIG. FIG. 15 is a diagram illustrating the relationship between the absolute position of the moving object, the independent movement vector, and the position after the parallel movement. In FIG. 15, the latest moving object absolute position 1501 represents the latest moving object absolute position detected by the moving object absolute position detecting means 1402, and the past moving object absolute position 1502 is obtained by the time t accumulated by the accumulating means 1408. It represents the past absolute position of the moving object. Also, the independent movement vector 1503 is an independent movement vector generated by the mobile object independent movement vector generation unit 1409, and the direction of the independent movement vector is determined by the same method as that described in Embodiment 4 with reference to FIG. calculate. The position 1504 after the parallel movement represents the position after the parallel movement calculated by the parallel movement position calculating means 1411. The absolute position difference vector 1505 is a difference vector between the latest moving object absolute position 1501 and the past moving object absolute position 1502. The vector determination unit 1412 first calculates the distance L between the latest moving object absolute position 1501 and the position 1504 after the parallel movement, and determines whether the distance L is within the allowable range. The distance L can be calculated using Equation 1, assuming that the angle between the absolute position difference vector 1505 and the independent movement vector 1503 is θ.
| AB | 2 = | A | 2 + | B | 2 +2 | A || B | cos θ
Where A: absolute position difference vector
B: Independent movement vector
θ: angle between A and B
[0045]
FIG. 16 is a flowchart illustrating the operation of the GPS data verification device according to the fifth embodiment. In FIG. 16, in step 1601, it is determined whether or not both the mobile object absolute position detection and the GPS azimuth detection are possible using the GPS. If both are detectable, the process proceeds to step 1602; otherwise, the process proceeds to step 1613. Proceed to. In step 1602, the moving body absolute position detection unit 1402 detects the moving body absolute position. In step 1603, the moving body absolute position error estimating means 1403 estimates the error included in the moving body absolute position detected in step 1602. In step 1604, the moving body absolute position detected in step 1602 and the moving body absolute position error estimated in step 1603 are accumulated by the accumulation means 1408 for a time t. In step 1605, the GPS moving body azimuth detecting means 1404 detects the GPS moving body azimuth obtained by the Doppler shift of the GPS signal. In step 1606, the GPS mobile azimuth error estimating means 1405 estimates an error included in the GPS mobile azimuth detected in step 1605. In step 1607, the moving body relative displacement detecting means 1406 detects the moving body relative displacement. In step 1608, the moving object relative displacement error estimating means 1407 estimates an error included in the moving object relative direction detected in step 1607. In step 1609, the mobile object independent movement vector generation means 1409 generates a mobile object independent movement vector. In step 1610, the azimuth error and the distance error included in the mobile object independent movement vector are estimated by the mobile object independent movement vector error estimating means 1410. In step 1611, the parallel movement position calculating unit 1411 performs parallel movement of the absolute position of the moving body in the past by the time t accumulated in step 1604 by using the independent movement vector generated in step 1609. Is calculated. In step 1612, the vector determination means 1412 compares the distance L between the absolute position of the moving object detected in step 1602 and the position after the parallel movement calculated in step 1611. If the distance L exceeds the allowable error range, If the processing in step 1613 is within the allowable error range, the processing in step 1614 is performed. In step 1613, the GPS data determination status output from the GPS data verification device is set to abnormal. In step 1614, the GPS data determination status output from the GPS data verification device is set to normal. In step 1615, the GPS data determination status set in step 1613 or step 1614 is output to the outside.
[0046]
As described above, according to the fifth embodiment, the moving body absolute position detected in the past by the time t using the GPS and the position obtained by translating the latest moving body absolute position by the amount of the independent movement vector are determined. In comparison, the distance L between the two is included in the error included in the estimated latest absolute position of the moving object, the error included in the absolute position of the moving object in the past for a certain accumulated time, and the azimuth and distance of the estimated independent moving vector. Since the GPS data is determined to be invalid when it is larger than the sum of the errors, the test of the GPS data can be performed without setting a reference value for determining the abnormality of the GPS data in advance. Further, since it is not necessary to continuously receive the satellite signal a predetermined number of times, the GPS data can be verified even in a place where it is difficult to continuously receive the satellite signal. Further, even when the difference between the moving speed of the moving object based on the satellite signal and the moving speed of the moving object based on the sensor is within an allowable range due to the low moving speed of the moving object, the GPS data can be obtained by comparing the moving vectors of the moving object. Can be realized.
[0047]
In each of the above embodiments, GPS is used as the satellite navigation system, but another satellite navigation system may be used.
[0048]
In the GPS data verification apparatus described in each of the above embodiments, the time for measuring the amount of change in position, speed, direction, and the like is set to a fixed time. While accumulating only minutes and varying the time for measuring the amount of change in position, speed, direction, etc., one GPS data was tested a plurality of times with the GPS data test, and the number of times determined to be abnormal was determined in advance. If the number of times exceeds the number, the GPS data may be determined to be abnormal. Thereby, even when there is an obstacle such as a building or under an elevated road and it is difficult to receive satellite signals, or when continuous GPS data cannot be acquired, such as immediately after turning on a satellite receiver, Testing of GPS data can be realized.
[0049]
Further, in the above embodiment, when it is determined that the GPS data is abnormal, a signal to that effect is notified so that the GPS data at that time is not used for the calculation of the position, speed, direction, and the like. However, when the GPS data is determined to be abnormal, the GPS data determined to be abnormal is recursively used for the GPS data test by expanding the estimated amount of error with respect to position, speed, direction, etc. You may. Accordingly, when the means for detecting the abnormality of the GPS data is determined to be abnormal, even if it is not possible to determine which of the GPS data as the reference of the change amount and the GPS data as the determination result of the present invention is abnormal data, Testing of GPS data can be realized.
[0050]
【The invention's effect】
As described above, in the data verification device and method of the present invention, the speed of a moving object obtained by a satellite signal is compared with the moving speed of the moving object obtained by a sensor mounted on the moving object, and the speed of the moving object is compared with the speed of the moving object. Since it is determined whether or not the difference value between the moving object moving speed and the estimated moving object moving speed error and the moving object moving speed error is greater than the sum, the abnormality of the satellite data is detected. The satellite data can be verified without setting a reference value for the satellite data in advance. Further, since it is not necessary to continuously receive the satellite signal a predetermined number of times, even in a place where it is difficult to continuously receive the satellite signal, it is possible to verify the satellite data by comparing the moving speeds of the moving objects. it can.
[Brief description of the drawings]
FIG. 1 is a block diagram illustrating a configuration of a GPS data verification device according to a first embodiment of the present invention.
FIG. 2 is a flowchart showing a processing procedure of the GPS data verification device according to the first embodiment of the present invention.
FIG. 3 is a block diagram showing a configuration of a GPS data verification device according to a second embodiment of the present invention.
FIG. 4 is a schematic diagram illustrating a method for estimating an azimuth error of GPS data according to a second embodiment of the present invention.
FIG. 5 is a flowchart showing a processing procedure of the GPS data verification device according to the second embodiment of the present invention.
FIG. 6 is a block diagram showing a configuration of a GPS data verification device according to a third embodiment of the present invention.
FIG. 7 is a schematic diagram illustrating an error in the absolute position of a moving object in GPS data according to a third embodiment of the present invention.
FIG. 8 is a schematic diagram illustrating a method for estimating a relative position error according to a third embodiment of the present invention.
FIG. 9 is a flowchart showing a processing procedure of the GPS data verification device according to the third embodiment of the present invention.
FIG. 10 is a block diagram showing a configuration of a GPS data verification device according to a fourth embodiment of the present invention.
FIG. 11 is a schematic diagram illustrating an error estimation method of an absolute azimuth error estimation unit according to a fourth embodiment of the present invention.
FIG. 12 is a schematic diagram illustrating a moving direction calculation method according to a fourth embodiment of the present invention.
FIG. 13 is a flowchart showing a processing procedure of the GPS data verification device according to the fourth embodiment of the present invention.
FIG. 14 is a block diagram showing a configuration of a GPS data verification device according to a fifth embodiment of the present invention.
FIG. 15 is a schematic diagram illustrating a method for comparing the position after the translation and the latest absolute position of the moving object according to the fifth embodiment of the present invention.
FIG. 16 is a flowchart showing a processing procedure of the GPS data verification device according to the fifth embodiment of the present invention.
[Explanation of symbols]
101 GPS receiving means
102 GPS moving body speed detecting means
103 GPS moving body speed error estimating means
104 Moving body moving speed detecting means
105 Moving body moving speed error estimating means
106 Speed judgment means
301 GPS receiving means
302 GPS moving body direction detecting means
303 GPS moving body direction error estimating means
304 Moving body relative direction detecting means
305 Moving body relative heading error estimation means
306 azimuth change amount determination means
601 GPS receiving means
602 Moving body absolute position detecting means
603 Moving body absolute position error estimating means
604 Moving body relative displacement detection means
605 Moving body relative displacement error estimating means
606 Displacement amount judgment means
1001 GPS receiving means
1002 Moving body absolute position detecting means
1003 Moving body absolute position error estimating means
1004 GPS moving direction detection means
1005 GPS moving body azimuth error estimating means
1006 Moving body relative displacement detecting means
1007 Moving body relative displacement error estimating means
1008 Absolute moving direction calculation means for moving object
1009 Moving body absolute movement direction error estimation means
1010 Moving body moving direction calculating means
1011 Moving body moving direction error estimating means
1012 Displacement direction determination means
1401 GPS receiving means
1402 Moving body absolute position detecting means
1403 Moving body absolute position error estimating means
1404 GPS moving direction detection means
1405 GPS mobile azimuth error estimating means
1406 Moving body relative displacement detecting means
1407 Moving body relative displacement error estimating means
1408 Storage means
1409 Moving body independent movement vector generation means
1410 Mobile body independent movement vector error estimating means
1411 Parallel movement position calculation means
1412 Vector judgment means