DE10258617B4 - Method and device for triggering an automatic emergency braking operation of a vehicle - Google Patents
Method and device for triggering an automatic emergency braking operation of a vehicle Download PDFInfo
- Publication number
- DE10258617B4 DE10258617B4 DE10258617A DE10258617A DE10258617B4 DE 10258617 B4 DE10258617 B4 DE 10258617B4 DE 10258617 A DE10258617 A DE 10258617A DE 10258617 A DE10258617 A DE 10258617A DE 10258617 B4 DE10258617 B4 DE 10258617B4
- Authority
- DE
- Germany
- Prior art keywords
- vehicle
- warning
- predetermined
- rel
- driver
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims abstract description 63
- 230000001960 triggered effect Effects 0.000 claims abstract description 46
- 230000001133 acceleration Effects 0.000 claims abstract description 24
- 238000011156 evaluation Methods 0.000 claims description 16
- 230000000694 effects Effects 0.000 claims description 13
- 230000009467 reduction Effects 0.000 claims description 11
- 230000003247 decreasing effect Effects 0.000 claims description 2
- 230000008569 process Effects 0.000 description 16
- 238000013459 approach Methods 0.000 description 7
- 230000003287 optical effect Effects 0.000 description 5
- 230000005540 biological transmission Effects 0.000 description 4
- 230000007423 decrease Effects 0.000 description 4
- 230000008859 change Effects 0.000 description 3
- 230000000007 visual effect Effects 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 239000013589 supplement Substances 0.000 description 2
- 230000009466 transformation Effects 0.000 description 2
- 230000003213 activating effect Effects 0.000 description 1
- 230000000994 depressogenic effect Effects 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 230000002028 premature Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q9/00—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling
- B60Q9/008—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling for anti-collision purposes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T17/00—Component parts, details, or accessories of power brake systems not covered by groups B60T8/00, B60T13/00 or B60T15/00, or presenting other characteristic features
- B60T17/18—Safety devices; Monitoring
- B60T17/20—Safety devices operable by passengers other than the driver, e.g. for railway vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
- B60T7/22—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger initiated by contact of vehicle, e.g. bumper, with an external object, e.g. another vehicle, or by means of contactless obstacle detectors mounted on the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2201/00—Particular use of vehicle brake systems; Special systems using also the brakes; Special software modules within the brake system controller
- B60T2201/02—Active or adaptive cruise control system; Distance control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
- B60W2520/105—Longitudinal acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/18—Braking system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Human Computer Interaction (AREA)
- Regulating Braking Force (AREA)
Abstract
Verfahren zur Auslösung eines selbsttätigen Notbremsvorgangs eines Fahrzeugs zur Vermeidung eines Auffahrens des Fahrzeugs auf ein vorausfahrendes Fahrzeug bzw. zur Verminderung der Auffahrfolgen, wobei eine Fahrerwarnung ausgelöst wird, wenn zumindest eine vorgegebene Warnbedingung erfüllt ist, dadurch gekennzeichnet, dass die Erfüllung der Warnbedingung angibt, dass aufgrund der unter Berücksichtigung der ermittelten Beschleunigung (a) des Fahrzeugs und/oder der ermittelten Relativbeschleunigung (arel) zwischen Fahrzeug und vorausfahrendem Fahrzeug gegebenen momentanen Fahrsituation des Fahrzeugs und einer vorgegebenen Notbremsverzögerung (aNB) bei Ablauf einer vorgegebenenen Warnzeitdauer (tw) der selbsttätige Notbremsvorgang auszulösen ist, mit dem Ziel, mit Beendigung des selbsttätigen Notbremsvorgangs eine vorgegebene Zielrelativgeschwindigkeit (vrel,z) und/oder einen vorgegebenen Zielsicherheitsabstand (dz) zwischen Fahrzeug und vorausfahrendem Fahrzeug zu erreichen.A method for triggering an automatic emergency braking operation of a vehicle to avoid a collision of the vehicle with a preceding vehicle or to reduce the Auffahrfolgen, wherein a driver warning is triggered when at least one predetermined warning condition is met, characterized in that the fulfillment of the warning condition indicates that on the basis of the instantaneous driving situation of the vehicle given by the vehicle and / or the ascertained relative acceleration (a rel ) between the vehicle and the vehicle ahead and a predetermined emergency brake delay (a NB ) at expiration of a predetermined warning period (t w ) automatic emergency braking is triggered, with the aim of the end of the automatic emergency braking a predetermined target relative speed (v rel, z ) and / or a predetermined target safety distance (d z ) between the vehicle and the vehicle ahead pass.
Description
Die Erfindung betrifft ein Verfahren und eine Vorrichtung zur Auslösung eines selbsttätigen Notbremsvorgangs eines Fahrzeugs, insbesondere eines Lastkraftwagens, nach dem Oberbegriff des Patentanspruchs 1 bzw. des Patentanspruchs 22. Die Erfindung bietet eine Assistenzfunktion zur Vermeidung eines Auffahrens des Fahrzeugs auf ein vorausfahrendes Fahrzeug bzw. zur Verminderung der Unfallfolgen, wenn ein Auffahren unvermeidbar ist, wobei die Auslösung einer Fahrerwarnung erfolgt, wenn eine gegebene Warnbedingung erfüllt ist. Die Erfüllung der Warnbedingung gibt an, dass nach Ablauf einer vorgegebenen Warnzeitdauer der selbsttätige Notbremsvorgang auszulösen ist.The The invention relates to a method and a device for triggering a automatic Emergency braking operation of a vehicle, in particular a truck, according to the preamble of claim 1 or the claim 22. The invention provides an assistance function for avoiding a Startup of the vehicle on a preceding vehicle or to Reduction of the consequences of an accident when it is unavoidable being the trigger a driver warning occurs when a given warning condition is met. The fulfillment the warning condition indicates that after a predetermined warning period has expired the automatic Emergency braking process trigger is.
In
der Druckschrift
Aufgrund der Art und Weise, in der die Einstellung des vorgegebenen Grenzzeitschwellenwerts durch das Bremssystem erfolgt, besteht die Möglichkeit, dass der vorgegebene Grenzzeitschwellenwert zu kurz ist, um mittels Durchführung des automatischen Bremsvorgangs einen Aufprall auf das vorausfahrende Fahrzeug vermeiden. zu können. In diesem Fall ist die ausschließliche Betrachtung der Grenzzeit bis zum Aufprall nicht ausreichend, und das Bremssystem bestimmt zusätzlich auf Basis der Fahrzeuggeschwindigkeit und des Reibungskoeffizienten zwischen der Straßenoberfläche und den Fahrzeugreifen einen Anhalteweg, der zum Anhalten des Fahrzeugs erforderlich ist. Ist die Grenzzeit größer als der vorgegebene Grenzzeitschwellenwert, der Abstand zwischen Fahrzeug und vorausfahrendem Fahrzeug aber kleiner als der bestimmte Anhalteweg, so wird ebenfalls nach Abgabe des Alarmsignals der automatische Bremsvorgang des Fahrzeugs durchgeführt, und zwar solange, bis der Abstand wieder größer als der aktuell bestimmte Anhalteweg ist.by virtue of the way in which the setting of the predetermined threshold time threshold is done by the braking system, there is a possibility that the given Limit time limit is too short to complete by performing the automatic braking an impact on the preceding vehicle Avoid vehicle. to be able to. In this case, the exclusive consideration is the time limit until the impact is insufficient, and the braking system determined additionally based on the vehicle speed and the coefficient of friction between the road surface and the vehicle tire a stopping distance, which is to stop the vehicle is required. If the limit time is greater than the predetermined threshold time threshold, the Distance between vehicle and preceding vehicle but smaller as the particular stopping distance, so will also after delivery of the Alarm signal of the automatic braking of the vehicle carried out, and although until the distance again larger than the currently determined Stopping route is.
Sowohl bei der Bestimmung der Grenzzeit als auch bei der Bestimmung des Anhaltewegs ist es nachteilig, dass die Betrachtung der Fahr- bzw. Verkehrssituation nur in vereinfachter Weise erfasst wird. In komplexen Verkehrssituationen wird daher unter Umständen eine Aufprallgefahr auf das vorausfahrende Fahrzeug nicht erkannt oder falsch eingeschätzt, sodass die Abgabe des Alarmsignals und damit gegebenenfalls die Durchführung des automatischen Bremsvorgangs zu früh, zu spät, überhaupt nicht oder in unnötiger Weise erfolgt.Either in the determination of the time limit as well as in the determination of the Stops it is disadvantageous that the consideration of the driving or Traffic situation is detected only in a simplified manner. In complex Traffic situations may therefore be subject to a risk of collision the preceding vehicle was not recognized or misjudged, so that the delivery of the alarm signal and thus possibly the implementation of the automatic braking too early, too late, not at all or done unnecessarily.
Aus
Es ist daher die Aufgabe der vorliegenden Erfindung, ein Verfahren bzw. eine Vorrichtung der eingangs genannten Art zu schaffen, bei dem bzw. bei der in komplexen Verkehrssituationen die Wahrscheinlichkeit einer Fehlauslösung des Fahreralarms und damit des selbsttätigen Notbremsvorgangs verringert wird.It is therefore the object of the present invention, a method or to provide a device of the type mentioned in at in or in complex traffic situations the probability a false trip reduced the driver alarm and thus the automatic emergency braking operation becomes.
Diese Aufgabe wird durch die Merkmale des Patentanspruchs 1 bzw. des Patentanspruchs 22 gelöst.These The object is achieved by the features of claim 1 and of the patent claim 22 solved.
Die Fahrerwarnung wird ausgelöst, wenn eine vorgegebene Warnbedingung erfüllt ist, wobei die Erfüllung der Warnbedingung angibt, dass aufgrund der momentanen Fahrsituation des Fahrzeugs und einer vorgegebenen Notbremsverzögerung bei Ablauf einer vorgegebenen Warnzeitdauer zur Vermeidung eines Auffahrens des Fahrzeugs auf das vorausfahrende Fahrzeug bzw. zur Verminderung der Unfallfolgen, wenn ein Auffahren unvermeidbar ist, der selbsttätige Notbremsvorgang auszulösen ist, mit dem Ziel, mit Beendigung des selbsttätigen Notbremsvorgangs eine vorgegebene Zielrelativgeschwindigkeit und/oder einen vorgegebenen Zielsicherheitsabstand zwischen Fahrzeug und vorausfahrendem Fahrzeug zu erreichen. Durch geeignete Vorgabe der Zielrelativgeschwindigkeit und/oder des Zielsicherheitsabstands kann unter anderem erreicht werden, dass die Auslösung des Fahreralarms und damit die Auslösung des selbsttätigen Notbremsvorgangs nicht früher erfolgt, als zur Vermeidung eines Auffahrens auf das vorausfahrende Fahrzeug notwendig ist. Die momentane Fahrsituation ergibt sich hierbei zumindest aus der ermittelten Beschleunigung des Fahrzeugs und der ermittelten Relativbeschleunigung zwischen Fahrzeug und vorausfahrendem Fahrzeug. Durch Einbeziehung dieser Größen ist es möglich, dass die Gefahr eines Auffahrens des Fahrzeugs auf das vorausfahrende Fahrzeug bei einer Vielzahl von komplexen Verkehrssituationen zuverlässig erkannt bzw. korrekt eingeschätzt wird. Der Einsatz des erfindungsgemäßen Verfahrens bzw. der erfindungsgemeäßen Vorrichtung bietet sich insbesondere in Zusammenhang mit Lastkraftwagen an, da gerade hier aufgrund der hohen Fahrzeugmassen ein Auffahren auf das vorausfahrende Fahrzeug in der Regel schwerwiegende Folgen hat. Es wird nicht nur eine Auffahrgefahr auf ein vorausfahrendes Fahrzeug, sondern natürlich auch auf jedes andere bewegliche oder feste Hindernis erkannt.The driver warning is triggered when a predetermined warning condition is met, the fulfillment of the warning condition indicates that due to the current driving situation of the vehicle and a predetermined emergency brake delay at the end of a predetermined warning period to avoid a collision of the vehicle on the vehicle ahead or to reduce the Accident consequences, when a collision is unavoidable, the automatic emergency braking is triggered, with the aim of completion of the automatic emergency braking a predetermined target relative speed and / or vorgebe to achieve a target safety distance between the vehicle and the vehicle ahead. By appropriate specification of the target relative speed and / or the target safety distance can be achieved, inter alia, that the triggering of the driver alarm and thus the triggering of the automatic emergency braking process does not take place earlier than is necessary to avoid a collision with the preceding vehicle. The instantaneous driving situation results here at least from the determined acceleration of the vehicle and the determined relative acceleration between the vehicle and the vehicle ahead. By including these variables, it is possible that the danger of a collision of the vehicle with the preceding vehicle is reliably detected or correctly estimated in a large number of complex traffic situations. The use of the method according to the invention or the device according to the invention is particularly appropriate in connection with trucks, since it is precisely here due to the high vehicle masses that a collision with the vehicle in front generally has serious consequences. It not only a Auffahrgefahr on a preceding vehicle, but of course any other movable or fixed obstacle detected.
Vorteilhafte Ausführungen des erfindungsgemäßen Verfahrens gehen aus den Unteransprüchen hervor.advantageous versions the method according to the invention go from the subclaims out.
Vorteilhafterweise erfolgt die Fahrerwarnung in für den Fahrer des Fahrzeugs optisch und/oder akustisch und/oder haptisch wahrnehmbarer Weise. So ist es möglich, den Fahrer unmissverständlich darauf aufmerksam zu machen, dass die Gefahr des Auffahrens auf das vorausfahrende Fahrzeug besteht und daher bei Ablauf der vorgegebenen Warnzeitdauer der selbsttätige Notbremsvorgang ausgelöst wird.advantageously, the driver warning is in for the driver of the vehicle visually and / or acoustically and / or haptically perceptible way. So it is possible the driver unmistakable to draw attention to the danger of collision the preceding vehicle exists and therefore at the expiry of the given Warning period of the automatic Emergency braking triggered becomes.
Um den selbsttätigen Notbremsvorgang sicherer zu gestalten, kann dem Fahrzeug bereits vor dessen Auslösung kinetische Energie entzogen werden, indem eine haptisch für den Fahrer des Fahrzeugs wahrnehmbare Fahrerwarnung in Form eines Teilbremsvorgangs des Fahrzeugs mit einer vorgebenenen Teilbremsverzögerung erfolgt. Die vorgegebene Teilbremsverzögerung ist hierbei kleiner als die vorgebenene Notbremsverzögerung.Around the automatic one To make emergency braking safer, the vehicle already can before its release kinetic energy can be withdrawn by adding a haptic to the driver the driver noticeable driver warning in the form of a partial braking operation of the vehicle takes place with a specified partial braking delay. The specified partial braking delay is smaller than the specified emergency brake delay.
Weiterhin besteht die Möglichkeit, den selbsttätigen Notbremsvorgang nur dann auszulösen, wenn eine gegebene Notbremsbedingung erfüllt wird und die vorgegebene Warnzeitdauer abgelaufen ist. So kann nochmals die Notwendigkeit des selbsttätigen Notbremsvorgangs vor dessen Auslösung überprüft werden.Farther it is possible, the automatic one Emergency brake operation only then trigger when a given emergency braking condition is met and the given one Warning period has expired. So again may the need of the automatic Emergency braking operation to be checked before its release.
Die Notbremsverzögerung oder eine damit zusammenhängende Größe, wie der Notbremsdruck, die Notbremskraft oder das Notbremsmoment, kann entweder fest oder aber einstellbar vorgegeben werden. In letzterem Fall besteht die Möglichkeit, in Abhängigkeit von Größen, die beispielsweise die Fahrzeugmas se, den Belagreibwert der Radbremseinrichtungen des Fahrzeugs, die Fahrbahnbeschaffenheit oder die Sichtverhältnisse beschreiben, beispielsweise eine tatsächlich erreichbare Maximalbremsverzögerung zu ermitteln und den Wert der vorgegebenen Notbremsverzögerung entsprechend der ermittelten tasächlich erreichbaren Maximalbremsverzögerung einzustellen. Einfacherweise kann der Wert der Notbremsverzögerung auch fest vorgegeben werden, wobei in diesem Fall vorzugsweise von einer durchschnittlich erreichbaren Maximalbremsverzögerung ausgegegangen wird, deren Wert typischerweise im Bereich zwischen 5 m/s2 und 7 m/s2 liegt.The emergency braking deceleration or an associated variable, such as the emergency brake pressure, the emergency braking force or the emergency braking torque, can be specified either fixed or adjustable. In the latter case, it is possible to determine, depending on variables such as the Fahrzeugmas se, the Belagreibwert the wheel brake of the vehicle, the road condition or visibility, for example, an actually achievable maximum braking delay and the value of the predetermined emergency brake delay according to the determined tasächlich achievable Set maximum brake delay. The value of the emergency brake delay can also be predefined in a fixed manner, in which case it is preferable to assume an average achievable maximum braking delay whose value is typically in the range between 5 m / s 2 and 7 m / s 2 .
Entsprechendes gilt für die Vorgabe der Warnzeitdauer, die ebenfalls fest oder einstellbar erfolgen kann. Eine fest vorgegebene Warnzeitdauer hat den Vorteil, dass dem Fahrer der Zeitpunkt der Auslösung des selbsttätigen Notbremsvorgangs bekannt ist und dieser nicht unerwartet bzw. unvorhersehbar eintrifft. Ein geeigneter Wert der vorgegebenen Warnzeitdauer kann aufgrund von Fahrversuchen ermittelt werden. Dieser liegt typischerweise im Bereich zwischen 1,7 und 2,3 Sekunden. Andererseits ist es denkbar, den Wert der vorgegebenen Warnzeitdauer in Abhängigkeit von Größen, die beispielsweise die Fahrzeugmasse, den Belagreibwert der Radbremseinrichtungen des Fahrzeugs, die Fahrbahnbeschaffenheit oder die Sichtverhältnisse beschreiben, einzustellen. Hierbei wird vorzugsweise ein Mindestwert der Warnzeitdauer vorgegeben, der nicht unterschritten werden soll, damit dem Fahrer grundsätzlich ausreichend Zeit bleibt, sich auf die Auslösung des selbsttätigen Notbremsvorgangs vorzubereiten oder vorher noch selbst einzugreifen.The same applies to the default of the warning period, which is also fixed or adjustable can be done. A fixed warning period has the advantage that the driver of the time of triggering the automatic emergency braking is known and this does not arrive unexpectedly or unpredictably. An appropriate value of the predetermined warning period may be due be determined by driving tests. This is typically in the range between 1.7 and 2.3 seconds. On the other hand, it is conceivable the value of the given warning period depending on variables that For example, the vehicle mass, the Belagreibwert the Radbremseinrichtungen of the vehicle, the road conditions or the visibility, adjust. In this case, preferably, a minimum value of the warning period predetermined, which should not be fallen below, so the driver in principle sufficient time remains, to the release of the automatic emergency braking prepare or intervene before.
Auch die Zielrelativgeschwindigkeit kann entweder fest oder aber einstellbar vorgegeben werden. Hierbei ist es von Vorteil, wenn der Wert einer fest vorgegebenen Zielrelativgeschwindigkeit in etwa Null beträgt. In diesem Fall wird die Eigengeschwindigkeit des Fahrzeugs durch den selbsttätigen Notbremsvorgang nur soweit wie unbedingt nötig verringert, um ein Auffahren des Fahrzeugs auf das vorausfahrende Fahrzeug zuverlässig zu verhindern. Jede darüber hinausgehende Verringerung der Eigengeschwindigkeit ist unnötig und stellt insbesondere für nachfolgende Fahrzeuge eine zusätzliche Gefahr dar.Also the target relative speed can either be fixed or adjustable be specified. It is advantageous if the value of a fixed predetermined target relative speed is approximately zero. In this Case, the vehicle's own speed through the automatic emergency braking only as far as absolutely necessary decreases to propel the vehicle to the preceding vehicle Vehicle reliable to prevent. Anything about it going beyond reducing the airspeed is unnecessary and represents in particular for subsequent vehicles an additional Danger.
Ferner kann auch der Zielsicherheitsabstand fest oder einstellbar vorgegeben werden. Eine Einstellung des Werts des Zielsicherheitsabstands kann entweder in Abhängigkeit von Größen, die beispielsweise die Fahrzeugmasse, den Bremsbelagreibwert der Radbremseinrichtungen des Fahrzeugs, die Fahrbahnbeschaffenheit, die Fahrzeuggeschwindigkeit oder die Sichtverhältnisse beschreiben, oder aber manuell durch den Fahrer des Fahrzeugs erfolgen. Hierbei ist vorzugsweise ein Mindestwert für den Zielsicherheitsabstand vorgegeben, sodass ein allzu dichtes Auffahren auf das vorausfahrende Fahrzeug mit Beendigung des selbsttätigen Notbremsvorgangs verhindert wird. Der Einfachheit halber kann die Vorgabe des Werts des Zielsicherheitsabstands auch fest vorgegeben werden, typischerweise liegt dieser dann zwischen Null und einigen Metern.Further The target safety distance can also be fixed or adjustable become. A setting of the value of the target safety distance can either in dependence of sizes that For example, the vehicle mass, the brake lining friction of the wheel brake of the vehicle, the road condition, the vehicle speed or the visibility describe, or be done manually by the driver of the vehicle. In this case, a minimum value for the target safety distance is preferably given, so that too close to the driving ahead Vehicle with completion of the automatic emergency braking prevented becomes. For the sake of simplicity, the specification of the value of the target safety distance are also fixed, typically this is then between Zero and a few meters.
Vorteilhafterweise unterbleibt bei Vorliegen von Fahreraktivität und/oder bei Verringerung der Auffahrgefahr die Auslösung einer Fahrerwarnung und/oder die Intensität der Fahrerwarnung wird angepasst. Auf diese Weise wird vermieden, dass der Fahrer des Fahrzeugs unnötig ausgelöste Fahrerwarnungen als störend empfindet und die erfindungsgemäße Vorrichtung auf Dauer abschaltet, sodass das erfindungsgemäße Verfahren nicht durchgeführt wird.advantageously, is omitted in the presence of driver activity and / or reduction the risk of collision triggering a driver warning and / or the intensity of the driver warning is adjusted. In this way it is avoided that the driver of the vehicle unnecessarily triggered driver warnings as disturbing and the device according to the invention permanently shuts off, so that the inventive method is not performed.
Weiterhin kann bei Vorliegen von Fahreraktivität und/oder bei Verringerung der Auffahrgefahr eine bereits ausgelöste Fahrerwarnung beendet und/oder verändert werden und/oder die Auslösung des selbsttätigen Notbremsvorgangs unterbleiben. Zum einen wird dem Fahrer des Fahrzeugs solange wie möglich die Gelegenheit gegeben, geeignete Gegenmaßnahmen zur Vermei dung des Auffahrens auf das vorausfahrende Fahrzeug zu treffen, und zum anderen wird eine zwischenzeitlich unnötig gewordene Fahrerwarnung nicht weiter aufrechterhalten und/oder ein zwischenzeitlich unnötig gewordener selbsttätiger Notbremsvorgang garnicht erst ausgelöst.Farther may be in the presence of driver activity and / or reduction the Auffahrgefahr an already triggered driver warning ended and / or changed be and / or the trigger the automatic emergency braking process remain under. First, the driver of the vehicle as long as possible given the opportunity to take appropriate countermeasures to avoid the Jump on the leading vehicle to meet, and on the other is a meantime unnecessary become no longer maintained and / or a driver warning in the meantime unnecessary become self-employed Emergency braking not even triggered.
Es ist möglich, den selbsttätigen Notbremsvorgang automatisch bei Ablauf der vorgegebenen Warnzeitdauer auszulösen, sofern die Fahrerwarnung nicht während der vorgegebenen Warnzeitdauer abgebrochen wird. In diesem Fall ist dem Fahrer des Fahrzeugs der Zeitpunkt der Auslösung des selbsttätigen Notbremsvorgangs bekannt, und er hat Gelegenheit, geeignete Gegenmaßnahmen zur Vermeidung des Auffahrens auf das vorausfahrende Fahrzeug zu treffen.It is possible, the automatic one Emergency braking automatically at the end of the specified warning period trigger, provided the driver warning is not during the predetermined warning period is aborted. In this case the driver of the vehicle is the time of release of the vehicle automatic Emergency braking known, and he has opportunity to take appropriate countermeasures to avoid the collision with the vehicle ahead to meet.
Um den Erfolg eines bereits ausgelösten selbsttätigen Notbremsvorgangs nicht durch einen vorzeitigen Abbruch von Seiten des Fahrers zu gefährden, wird dieser erst dann abgebrochen, wenn eine ermittelte Notbremszeitdauer abgelaufen ist und/oder wenn die vorgegebene Zielrelativgeschwindigkeit und der vorgegebene Zielsicherheitsabstand erreicht sind. Die Notbremszeitdauer hängt ab von der momentanen Fahrsituation beim Auslösen des selbsttätigen Notbremsvorgangs, der vorgegebenen Notbremsverzögerung, der Zielrelativgeschwindigkeit und dem Zielsicherheitsabstand.Around the success of an already triggered automatic Emergency braking not by premature termination of pages to endanger the driver, this is only canceled when a determined emergency brake time has expired and / or if the given target relative speed and the predetermined target safety distance are reached. The emergency braking time depends from the current driving situation when triggering the automatic emergency braking operation, the predetermined emergency brake delay, the target relative velocity and the target safety distance.
Vorteilhafterweise besteht die Fahrerwarnung aus wenigstens zwei Warnstufen, die innerhalb der vorgegebenen Warnzeitdauer der Fahrerwarnung zeitlich nacheinander ausgelöst werden, wobei jeder Warnstufe eine vorgegebene Warnstufenzeitdauer zugeordnet ist. Somit ist es möglich, die Fahrerwarnung durch Verwendung unterschiedlich dringlicher Warnstufen aufzubauen, wobei die Dringlichkeit der Warnstufen mit Abnahme der bis zur Auslösung des selbsttätigen Notbremsvorgangs verbleibenden Zeit zunehmen kann, sodass der Fahrer auf die kürzer werdende Zeitspanne bis zur Auslösung des selbsttätigen Notbremsvorgangs hingewiesen wird.advantageously, the driver warning consists of at least two warning levels within the predetermined warning period of the driver warning in chronological succession triggered with each warning level a predetermined warning level duration assigned. Thus, it is possible the driver warning by using different urgency warning levels with the urgency of the warning levels with decrease of until release of the automatic Emergency braking process can increase remaining time, allowing the driver on the shorter Expected time to trigger of the automatic Notbremsvorgangs is pointed out.
Die Warnstufenzeitdauer einer Warnstufe kann fest oder aber einstellbar vorgegeben sein. Eine fest vorgegebene Warnstufenzeitdauer hat den Vorteil, dass dem Fahrer der Zeitpunkt der Auslösung einer gegebenenfalls nachfolgenden Warnstufe und/oder des selbsttätigen Notbremsvorgangs bekannt ist und dieser nicht unerwartet bzw. unvorhersehbar eintrifft.The Warning level duration of a warning level can be fixed or adjustable be predetermined. A fixed warning level period has the Advantage that the driver of the time of triggering any subsequent Warning level and / or the automatic Notbremsvorgangs is known and this is not unexpected or unpredictable arrives.
Daneben besteht die Möglichkeit, den Wert der Warnstufenzeitdauer einer Warnstufe in Abhängigkeit von Größen einzustellen, die beispielsweise die Fahrzeugmasse, den Bremsbelagreibwert der Radbremseinrichtungen des Fahrzeugs, die Sichtverhältnisse oder die Fahrbahnbeschaffenheit beschreiben. So kann beispielsweise die letzte und damit in der Regel dringlichste Warnstufe umso früher ausgelöst werden, je ungünstiger die Verhältnisse zur Vermeidung des Auffahrens durch Auslösung des selbsttätigen Notbremsvorgangs sind.Besides it is possible, the value of the warning level duration of a warning level as a function of Set sizes, For example, the vehicle mass, the brake lining friction of the Wheel brake devices of the vehicle, the visibility or describe the road surface. So, for example the last and thus usually most urgent warning level will be triggered earlier, the less favorable the ratios to avoid the collapse by triggering the automatic emergency braking operation.
Weiterhin besteht die Möglichkeit, nach Auslösung einer ersten Warnstufe nur dann wenigstens eine weitere Warnstufe auszulösen, wenn eine der weiteren Warnstufe jeweils zugeordnete, vorgegebene Warnbedingung erfüllt ist. So lässt sich die Notwendigkeit der Auslösung jeder weiteren Warnstufe überprüfen und die Auslösung unnötiger, der tatsächlichen Auffahrgefahr unangemessener Warnstufen vermeiden.Furthermore, there is the possibility, after triggering a first warning level, to trigger at least one further warning level only if one of the further warning level respectively assigned, predetermined warning condition is fulfilled. Thus, the necessity of triggering each further warning level can be checked and the Triggering unnecessary, avoid the actual Auffahrgefahr inappropriate warning levels.
Bei Vorliegen von Fahreraktivität und/oder bei Verringerung der Auffahrgefahr kann wenigstens eine der bereits ausgelösten Warnstufen beendet werden und/oder die Auslösung weiterer Warnstufen unterbleiben. So wird vermieden, dass der Fahrer des Fahrzeugs unnötig ausgelöste Warnstufen als störend empfindet und die erfindungsgemäße Vorrichtung deaktiviert. Hierbei ist es auch möglich, eine bereits ausgelöste Warnstufe, die beispielweise in Form einer optischen Fahrerwarnung vorliegt, bis zum Ablauf der vorgegebenen Warnzeitdauer aufrechtzuerhalten und lediglich weitere Warnstufen nicht auszulösen, um den Fahrer auf die potentiell bestehende Auffahrgefahr hinzuweisen.at Presence of driver activity and / or reducing the Auffahrgefahr at least one of already triggered Warning levels are terminated and / or the triggering of other warning levels are omitted. This avoids that the driver of the vehicle unnecessarily triggered warning levels as disturbing feels and the device of the invention disabled. It is also possible to use an already triggered alert level, which is for example in the form of an optical driver warning, up to the expiration of the predetermined warning period and just do not trigger further warning levels to alert the driver to the potential to indicate existing danger of collision.
Zweckmäßigerweise wird das Vorliegen von Fahreraktivität aufgrund einer Betätigung wenigstens eines der Bedienelemente des Fahrzeugs erkannt, wobei das Bedienelement insbesondere zur Änderung der Längs- oder Querdynamik des Fahrzeugs dient. Zu den Bedienelementen, die zur Erkennung der Fahreraktivität geeignet sind, zählen beispielsweise das Fahrpedal, das Bremspedal, das Kupplungspedal, das Lenkrad oder die Richtungsgeber des Fahrzeugs.Conveniently, the presence of driver activity due to an operation is at least one of the controls of the vehicle detected, the control in particular for amendment the longitudinal or lateral dynamics of the vehicle is used. To the controls that for recognizing driver activity are eligible to count For example, the accelerator pedal, the brake pedal, the clutch pedal, the steering wheel or the direction sensors of the vehicle.
Eine Verringerung der Auffahrgefahr kann in einfacher Weise anhand eines mit der Zeit zunehmenden Abstands zwischen Fahrzeug und vorausfahrendem Fahrzeug und/oder einer mit der Zeit abnehmenden Relativgeschwindigkeit zwischen Fahrzeug und vorausfahrendem Fahrzeug erkannt werden.A Reducing the risk of collision can be easily determined by means of a with time increasing distance between vehicle and preceding Vehicle and / or a relative speed decreasing over time be detected between the vehicle and the vehicle ahead.
Um die Gefahr eines Auffahrens des Fahrzeugs auf das vorausfahrende Fahrzeug auch in komplexen Verkehrsituationen zuverlässig erkennen bzw. korrekt einschätzen zu können, wird die momentane Fahrsituation des Fahrzeugs in Abhängigkeit des ermittelten Abstands zwischen Fahrzeug und vorausfahrendem Fahrzeug und/oder der ermittelten Geschwindigkeit des Fahrzeugs und/oder der ermittelten Relativbeschleunigung zwischen Fahrzeug und vorausfahrendem Fahrzeug und/oder der ermittelten Beschleunigung des Fahrzeugs und/oder der Fahrbahnneigung und/oder von Reibwerten zwischen der Fahrbahn und den Fahrzeugrädern bestimmt.Around the risk of a collision of the vehicle with the vehicle ahead Detect vehicle reliably even in complex traffic situations or assess correctly to be able to is the current driving situation of the vehicle depending the determined distance between the vehicle and the vehicle ahead and / or the determined speed of the vehicle and / or the determined relative acceleration between the vehicle and the vehicle ahead Vehicle and / or the determined acceleration of the vehicle and / or the road inclination and / or friction between the roadway and the vehicle wheels certainly.
Damit die Gefahr möglicher Folgeunfälle verringert wird, kann bei Auslösung des selbsttätigen Notbremsvorgangs eine Warnung vorausfahrender und/oder hinterherfahrender Fahrzeuge erfolgen. Hierzu werden beispielsweise die Bremslichter, die Fahrzeughupe, die Warnblinker oder das Fahr- oder Fernlicht des Fahrzeugs betätigt.In order to the danger of possible secondary accidents can be reduced when triggered of the automatic Emergency braking operation a warning of driving ahead and / or behind Vehicles are made. For this example, the brake lights, the vehicle horn, the hazard warning lights or the driving or high beam of the vehicle operated.
Das erfindungsgemäße Verfahren bzw. die erfindungsgemäße Vorrichtung zur Auslösung eines selbsttätigen Notbremsvorgangs eines Fahrzeugs wird im folgenden anhand der Zeichnungen näher erläutert. Dabei zeigen:The inventive method or the device according to the invention for triggering an automatic Emergency braking operation of a vehicle is described below with reference to the drawings explained in more detail. there demonstrate:
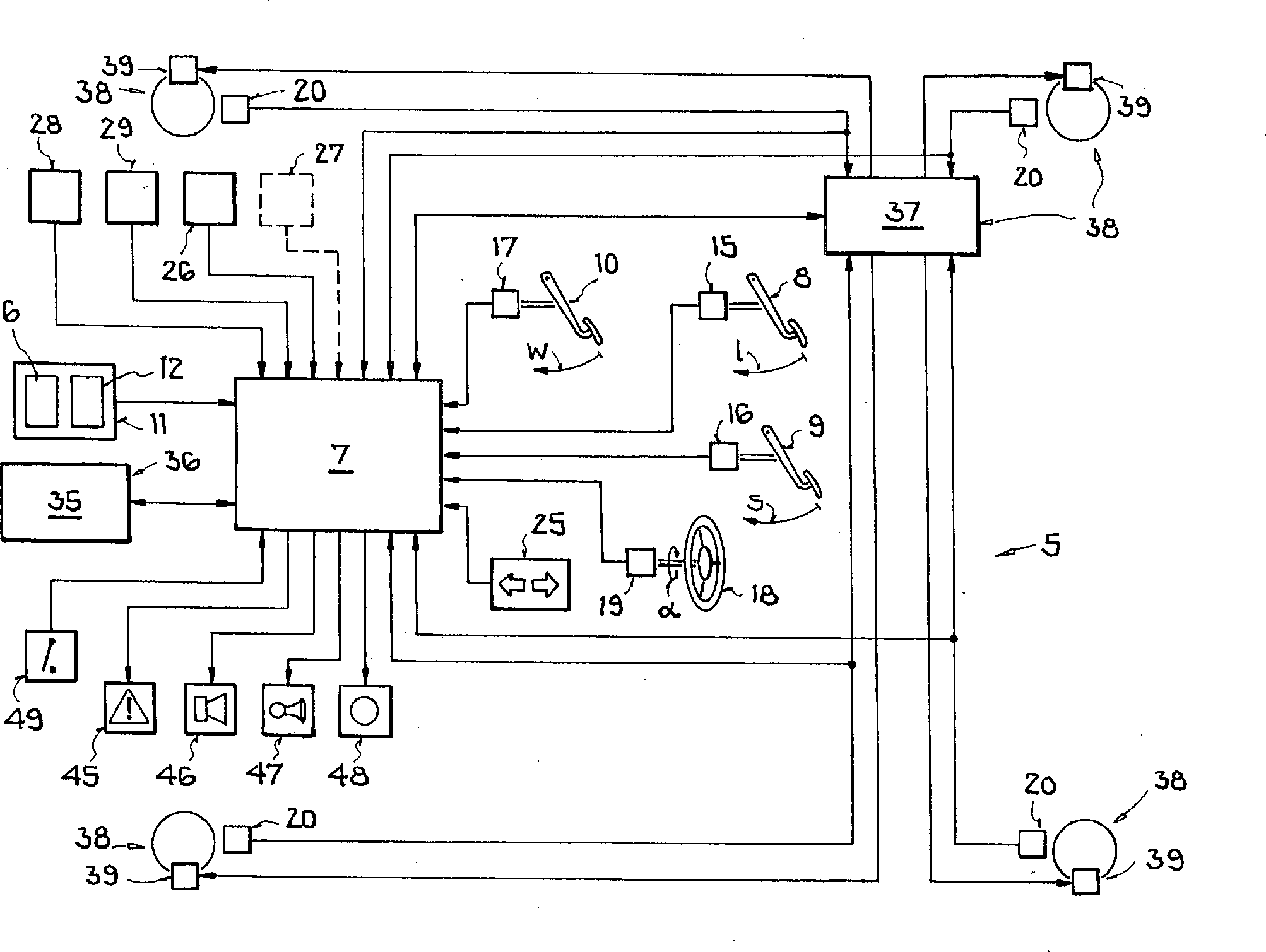
Bei
einem Fahrzeug mit manuellem Schaltgetriebe weist die Vorrichtung
Zusätzlich wird
von der Auswerteeinheit
Die
Auswerteeinheit
Die
Assistenzfunktion wird zur Durchführung des erfindungsgemäßen Verfahrens über einen
mit der Auswerteeinheit
Für die von
einem Fahrzeug zum Zeitpunkt t zurückgelegte Strecke s(t) gilt ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Dem
Fahrzeug soll nun ein weiteres Fahrzeug vorausfahren, wobei das
vorausfahrende Fahrzeug nachfolgend mit dem Index „v" gekennzeichnet wird.
Die Relativgeschwindigkeit vrel(t) zwischen
Fahrzeug und vorausfahrendem Fahrzeug zum Zeitpunkt t wird durch
In
entsprechender Weise wird eine Relativbeschleunigung arel(t)
zwischen Fahrzeug und vorausfahrendem Fahrzeug zum Zeitpunkt t definiert,
Der
Abstand d(t) zwischen Fahrzeug und vorausfahrendem Fahrzeug zum
Zeitpunkt t ergibt sich aus
Im folgenden sei mit ttc diejenige Zeit bezeichnet, die vergehen muss, bis es zum Auffahren des Fahrzeugs auf das vorausfahrende Fahrzeug kommt („time-to-crash").In the following, t tc is the time that must elapse before the time when the vehicle approaches the vehicle in front ("time-to-crash").
Weiterhin wird vereinfachend angenommen, dass die Beschleunigungen von Fahrzeug und vorausfahrendem Fahrzeug zeitlich konstant sind. Aufgrund dieser Vereinfachung sind bei der Bestimmung der Zeit ttc zwei Fälle zu unterscheiden:
- – Im ersten Fall fährt das Fahrzeug auf das noch fahrende vorausfahrende Fahrzeug auf.
- – Im zweiten Fall kommt das vorausfahrende Fahrzeug noch vor dem Auffahren des Fahrzeugs auf das vorausfahrende Fahrzeug zum Stillstand.
- - In the first case, the vehicle starts on the still driving vehicle ahead.
- In the second case, the vehicle in front comes to a standstill before the vehicle drives onto the preceding vehicle.
Im zweiten Fall würde aufgrund der als zeitlich konstant angenommenen Beschleunigungen das vorausfahrende Fahrzeug seine Bewegungsrichung umkehren, nachdem es zum Stillstand gekommen ist. In der Realität ist das natürlich nicht der Fall. In diesem Fall wäre eine unnötig frühe Auslösung eines selbsttätigen Notbremsvorgangs die Folge. Um dies zu vermeiden, müssen der erste und der zweite Fall getrennt behandelt werden, wobei im zweiten Fall die Beschleunigung av des vorausfahrenden Fahrzeugs ab dessen Stillstandszeitpunkt Null beträgt.In the second case, due to the accelerations assumed to be constant over time, the preceding vehicle would reverse its direction of movement after it had come to a standstill. Of course, that's not the case in reality. In this case, an unnecessarily early triggering of an automatic emergency braking operation would result. In order to avoid this, the first and the second case must be treated separately, in the second case, the acceleration a v of the preceding vehicle is zero from its standstill time point.
Generell erfolgt ein Auffahren auf das vorausfahrende Fahrzeug, wenn der Abstand d(t) zwischen Fahrzeug und vorausfahrendem Fahrzeug zu Null wird.As a general rule An approach to the preceding vehicle occurs when the Distance d (t) between vehicle and preceding vehicle to zero becomes.
Im
ersten Fall ergibt sich daher die Zeit ttc bis
zum Auffahren auf das vorausfahrende Fahrzeug wegen Gleichung (10)
zu
Ist
arel(0) = 0, aber vrel(0) ≠ 0, so gilt
außerdem ![]()
![]()
Damit
ist ![]()
![]()
Die
Lösung
der quadratischen Gleichung (11) lautet ![]()
![]()
Im
zweiten Fall ist die Zeit tstill,v bis zum
Stillstand des vorausfahrenden Fahrzeugs entsprechend Gleichung
(6) für
vv(0) ≥ 0
durch 
![]()
![]()
Für den Abstand
d(t) zwischen Fahrzeug und vorausfahrendem Fahrzeug zu einem beliebigen
Zeitpunkt t ≥ tstil,v gilt
Gemäß Gleichung
(6) ist ![]()
![]()
Weiterhin
gilt aufgrund der getroffenen Annahme konstanter Beschleunigungen 
Ein
Auffahren auf das vorausfahrende Fahrzeug erfolgt, wenn der Abstand
d(t) zwischen Fahrzeug und vorausfahrendem Fahrzeug zu Null wird.
Damit bestimmt sich die Zeit ttc – tstill,v zwischen Stillstand des vorausfahrenden
Fahrzeugs und dem Auffahren des Fahrzeugs auf das vorausfahrende
Fahrzeug zu 
Ein selbsttätiger Notbremsvorgang zur Vermeidung eines Auffahrens des Fahrzeugs auf das vorausfahrende Fahrzeug ist auszulösen, wenn der Abstand d(0), die Relativgeschwindigkeit vrel(0), die Beschleunigung a(0) des Fahrzeugs und die Beschleunigung av(0) des vorausfahrenden Fahrzeugs in einem bestimmten Zusammenhang zueinander stehen. Um diesen Zusammenhang zu ermitteln, wird in einem ersten Schritt die zur Vermeidung eines Auffahrens erforderliche Notbremsverzögerung aNB bestimmt. Der selbsttätige Notbremsvorgang erfolgt mit dem Ziel, mit seiner Beendigung eine vorgegebene Zielrelativgeschwindigkeit vrel,z = 0 und einen vorgegebenen Zielsicherheitsabstand dz zwischen Fahrzeug und vorausfahrendem Fahrzeug zu erreichen. Der Zielsicherheitsabstand dz kann hierbei gleich Null sein, wird aber in der Regel der Sicherheit wegen größer als Null angesetzt, beispielsweise in der Größenord- nung einiger Meter.An automatic emergency braking operation to avoid a collision of the vehicle on the advance vehicle is to be triggered when the distance d (0), the relative speed v rel (0), the acceleration a (0) of the vehicle and the acceleration a v (0) of the preceding vehicle in a certain relationship to each other. In order to determine this relationship, in a first step, the emergency braking deceleration a NB required for avoiding start-up is determined. The automatic emergency braking operation is carried out with the aim of achieving a predetermined target relative speed v rel, z = 0 and a predetermined target safety distance d z between the vehicle and the vehicle ahead when it is completed. The target safety distance d z can be zero here, but as a rule it is assumed to be greater than zero for safety, for example of the order of a few meters.
Im
ersten Fall behält
das vorausfahrende Fahrzeug aufgrund der vereinfachenden Annahme
konstanter Beschleunigungen seine Beschleunigung a auch nach Beendigung
des selbsttätigen
Notbremsvorgangs bei. Die Notbremszeitdauer tNB ist
wegen Gleichung (8) gegeben durch ![]()
![]()
Für den Abstand
d(t), der sich bei Beendigung des selbsttätigen Notbremsvorgangs ergibt,
gilt nach Gleichung (10) ![]()
![]()
Gleichsetzen
mit dz ergibt für die erforderliche Notbremsverzögerung aNB ![]()
![]()
Erfindungsgemäß ist die
Notbremsverzögerung
aNB vorgegeben. In diesem Fall lässt sich
Gleichung (25) durch Umformung übersichtlicher
darstellen,
Es ist also im ersten Fall ein selbsttätiger Notbremsvorgang auszulösen, wenn der in Gleichung (25) oder (26) beschriebene Zusammenhang erfüllt ist.It Thus, in the first case, an automatic emergency braking process is triggered when the relationship described in equation (25) or (26) is satisfied.
Im
zweiten Fall kommt das vorausfahrende Fahrzeug noch vor Beendigung
des selbsttätigen
Notbremsvorgangs zum Stillstand. Für den Abstand d(t) zwischen
Fahrzeug und vorausfahrendem Fahrzeug gilt aufgrund der Gleichungen
(12) und (17) für
beliebige Zeiten t > tstill,v 
Die
Zeitdauer nach Stillstand des vorausfahrenden Fahrzeugs bis zur
Beendigung des selbsttätigen Notbremsvorgangs
ist wegen Gleichung (18) durch ![]()

![]()
Durch
Ausmultiplizieren folgt daraus ![]()
![]()
![]()
![]()
Die erforderliche Notbremsverzögerung aNB ist hier alsoThe required emergency brake delay a NB is here so
![]()
![]()
Ist
die Notbremsverzögerung
aNB vorgegeben, lässt sich Gleichung (32) durch
Umformung übersichtlicher
darstellen,
Es ist also im zweiten Fall ein selbsttätiger Notbremsvorgang auszulösen, wenn der in Gleichung (32) oder (33) beschriebene Zusammenhang erfüllt ist.It Thus, in the second case, an automatic emergency braking operation is triggered when the relationship described in equation (32) or (33) is satisfied.
Eine
beim Ausführungsbeispiel
fest vorgegebene Warnzeitdauer tw vor Auslösung des
selbsttätigen Notbremsvorgangs
soll eine Auslösung
einer Fahrerwarnung erfolgen. Für
die Relativgeschwindigkeit Vrel(0) und den
Abstand d(0) zum Zeitpunkt der Auslösung der Fahrerwarnung gilt
Hierbei
bezeichnen dNB bzw. vrel,NB den
Abstand bzw. die Relativgeschwindigkeit zwischen Fahrzeug und vorausfahrendem
Fahrzeug zum Zeitpunkt der Auslösung
des selbsttätigen
Notbremsvorgangs. Werden die Gleichungen (34) und (35) in Gleichung
(26) eingesetzt, so ergibt sich im ersten Fall
Die Auslösung der Fahrerwarnung erfolgt im ersten Fall, wenn der in Gleichung (37) beschriebene Zusammenhang erfüllt ist.The release the driver warning occurs in the first case when the in equation (37).
Weiterhin
gilt für
die Geschwindigkeiten von Fahrzeug und vorausfahrendem Fahrzeug
Werden
die Gleichungen (38) und (39) in Gleichung (33) eingesetzt, so ergibt
sich im zweiten Fall
Die Auslösung der Fahrerwarnung erfolgt also im zweiten Fall, wenn die in Gleichung (42) angegebene Warnbedingung erfüllt ist.The release the driver warning is thus in the second case, if the in equation (42) specified warning condition is met.
Die Fahrerwarnung soll aus wenigstens zwei Warnstufen bestehen, die zeitlich nacheinander ausgelöst werden, wobei jeder Warnstufe eine vorgegebene Warnstufenzeitdauer zugeordnet ist. Eine vorgegebene Warnstufenzeitdauer th vor Auslösung des selbsttätigen Notbremsvorgangs soll eine Warnstufe ausgelöst werden, in der die Fahrerwarnung in haptisch wahrnehmbarer Weise erfolgt, wiederum eine vorgegebene Warnstufenzeitdauer toa vor Auslösung der haptischen Fahrerwarnung soll eine weitere Warnstufe ausgelöst werden, in der die Fahrerwar nung in optisch und/oder akustisch wahrnehmbarer Weise erfolgt. Die Warnzeitdauer tw der Fahrerwarnung ist in diesem Fall durch die Summe der vorgegebenen Warnstufenzeitdauer toa der optischen und/oder akustischen Fahrerwarnung und der vorgegebenen Warnstufenzeitdauer th der haptischen Fahrerwarnung gegeben. Die haptische Fahrerwarnung erfolgt in Form einer Teilbremsung des Fahrzeugs mit einer vorgegebenen Teilbremsverzögerung aTB, die kleiner als die vorgegebene Notbremsverzögerung aNB ist. Dementsprechend muss sowohl die Geschwindigkeitsänderung während der optischen und/oder akustischen als auch während der haptischen Fahrerwarnung getrennt berücksichtigt werden.The driver warning should consist of at least two warning levels, which are triggered in succession, each warning level is assigned a predetermined Warnstufenzeitdauer. A predetermined warning stage time t h before triggering the automatic emergency braking operation, a warning level is triggered, in which the driver warning in haptic perceptible manner, again a predetermined warning stage time t oa before triggering the haptic driver warning to trigger another warning level, in which the driver warning in optically and / or acoustically perceptible manner. The warning time duration t w of the driver warning is given in this case by the sum of the predetermined warning time period t oa of the visual and / or acoustic driver warning and the predetermined warning time period t h of the haptic driver warning. The haptic driver warning takes place in the form of a partial braking of the vehicle with a predetermined partial braking delay a TB , which is smaller than the predetermined emergency brake delay a NB . Accordingly, both the speed change during the visual and / or acoustic as well as during the haptic driver warning must be considered separately.
Der
Abstand und die Relativgeschwindigkeit zum Zeitpunkt der Auslösung der
Fahrerwarnung werden durch
Die Auslösung der Fahrerwarnung mit den beiden Warnstufen erfolgt im ersten Fall, wenn die in Gleichung (48) angegebene Warnbedingung erfüllt ist.The release the driver warning with the two warning levels takes place in the first case, when the warning condition given in equation (48) is satisfied.
Weiterhin
gilt für
die Geschwindigkeiten von Fahrzeug und vorausfahrendem Fahrzeug
zum Zeitpunkt der Auslösung
der Fahrerwarnung
Einsetzen
der Gleichungen (49), (50) und (45) in Gleichung (33) ergibt im
zweiten Fall
Gleichung
(53) kann weiter vereinfacht werden,
Die Auslösung der Fahrerwarnung mit den beiden Warnstufen erfolgt also im zweiten Fall, wenn die in Gleichung (54) angegebene Warnbedingung erfüllt ist.The release the driver warning with the two warning levels thus takes place in the second Case when the warning condition given in equation (54) is satisfied.
In
In
einem zweiten Hauptschritt
In
einem dritten Hauptschritt
Ist
die erste Warnstufenbedingung erfüllt, so wird in einem vierten
Hauptschritt
Ist
die erste Warnstufenbedingung hingegen nicht erfüllt, so kehrt der Verfahrensablauf
wieder zum zweiten Hauptschritt
Wird
in einem fünften
Hauptschritt
Ist
hingegen das Abbruchkriterium nicht erfüllt, wird in einem siebten
Hauptschritt
In der zweiten Warnstufe erfolgt die Fahrerwarnung in haptisch wahrnehmbarer Weise, und zwar in Form eines Teilbremsvorgangs des Fahrzeugs mit der vorgegebenen Teilbremsverzögerung aTB. Mit Auslösung der zweiten Warnstufe wird gleichzeitig ein zweiter Zeitzähler T2 gestartet.In the second warning level the driver warning takes place in haptic perceptible manner, in the form of a partial braking operation of the vehicle with the predetermined partial braking delay a TB . When the second warning level is triggered, a second time counter T 2 is simultaneously started.
In diesem Ausführungsbeispiel wird von insgesamt zwei Warnstufen ausgegangen, aus der die Fahrerwarnung besteht. Denkbar ist auch eine beliebige andere Anzahl von Warnstufen, wo bei die Fahrerwarnung jeweils in optisch und/oder akustisch und/oder haptisch wahrnehmbarer Weise erfolgt.In this embodiment is assumed by a total of two warning levels, from which the driver warning consists. Also conceivable is any other number of warning levels, where in the driver warning in each case visually and / or acoustically and / or haptic perceptible way.
Wird
in einem achten Hauptschritt
Ist
jedoch das Abbruchkriterium im achten Hauptschritt
In
einem elften Hauptschritt
Das
im fünften
Hauptschritt
Eine Verringerung der Auffahrgefahr wird beispielsweise anhand eines mit der Zeit zunehmenden Abstands d zwischen Fahrzeug und vorausfahrendem Fahrzeug und/oder eines mit der Zeit abnehmenden Betrags der Relativgeschwindigkeit vrel zwischen Fahrzeug und vorausfahrendem Fahrzeug erkannt. Auch hier wird beispielsgemäß das Abbruchkriterium nur dann erfüllt, wenn die Zunahme des Abstands d zwischen Fahrzeug und vorausfahrendem Fahrzeug und/oder die Abnahme der Relativgeschwindigkeit vrel zwischen Fahrzeug und vorausfahrendem Fahrzeug über vorgegebenen Schwellenwerten liegen.A reduction in the danger of a collision is detected, for example, on the basis of an increasing distance d between the vehicle and the vehicle traveling ahead over time and / or an amount of the relative speed v rel between the vehicle and the vehicle in front which decreases over time. Again, the abort criterion is only met, for example, if the increase in the distance d between the vehicle and the vehicle ahead and / or the decrease in the relative velocity v rel between the vehicle and the vehicle ahead are above predetermined threshold values.
Hierbei
ist es vorstellbar, die in
Claims (22)
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE10258617A DE10258617B4 (en) | 2002-09-20 | 2002-12-16 | Method and device for triggering an automatic emergency braking operation of a vehicle |
| EP03798143A EP1539523B1 (en) | 2002-09-20 | 2003-08-30 | Method and device for triggering an automatic emergency braking process of a vehicle |
| JP2004538855A JP2006500270A (en) | 2002-09-20 | 2003-08-30 | Method and apparatus for initiating an automatic emergency braking process for a vehicle |
| DE50303235T DE50303235D1 (en) | 2002-09-20 | 2003-08-30 | METHOD AND DEVICE FOR TRIGGERING AN AUTOMATIC EMERGENCY BRAKE OPERATION OF A VEHICLE |
| PCT/EP2003/009643 WO2004028847A1 (en) | 2002-09-20 | 2003-08-30 | Method and device for triggering an automatic emergency braking process of a vehicle |
| US10/527,982 US7425043B2 (en) | 2002-09-20 | 2003-08-30 | Method and device for triggering an automatic emergency braking process of a vehicle |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE10243978 | 2002-09-20 | ||
| DE10243978.8 | 2002-09-20 | ||
| DE10258617A DE10258617B4 (en) | 2002-09-20 | 2002-12-16 | Method and device for triggering an automatic emergency braking operation of a vehicle |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| DE10258617A1 DE10258617A1 (en) | 2004-04-01 |
| DE10258617B4 true DE10258617B4 (en) | 2007-06-14 |
Family
ID=31969381
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| DE10258617A Expired - Fee Related DE10258617B4 (en) | 2002-09-20 | 2002-12-16 | Method and device for triggering an automatic emergency braking operation of a vehicle |
Country Status (1)
| Country | Link |
|---|---|
| DE (1) | DE10258617B4 (en) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102010033008A1 (en) | 2010-07-31 | 2011-03-17 | Daimler Ag | Method for operating collision preventing system of vehicle, involves recording present driving area between vehicle and potential collision partner by recording unit |
| DE102010006762A1 (en) | 2010-02-04 | 2011-08-04 | Bayerische Motoren Werke Aktiengesellschaft, 80809 | Method for automatic braking of a vehicle for collision avoidance or collision following reduction |
| DE102010031038A1 (en) * | 2010-07-07 | 2012-01-12 | Robert Bosch Gmbh | Method for assisting a driver of a motor vehicle |
| EP2407358A1 (en) | 2010-07-17 | 2012-01-18 | MAN Truck & Bus AG | Method for executing an emergency brake procedure on a vehicle |
| DE102010041147A1 (en) | 2010-09-21 | 2012-03-22 | Continental Teves Ag & Co. Ohg | Method and system for reducing a reaction dead time of a vehicle safety control device |
| DE102012014624A1 (en) | 2012-07-24 | 2013-01-31 | Daimler Ag | Method for collision prevention or collision sequence reduction for person guided motor vehicle, involves triggering warning and/or autonomous emergency braking at object when presence of straight-on driving position of vehicle is detected |
| WO2013064705A1 (en) | 2012-02-14 | 2013-05-10 | Wabco Gmbh | Method for determining an emergency braking situation of a vehicle |
| EP3153376A2 (en) | 2015-10-08 | 2017-04-12 | Volkswagen Aktiengesellschaft | Method and device for determining the adaptive reaction time of a driver of a motor vehicle |
Families Citing this family (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ATE396470T1 (en) | 2004-04-08 | 2008-06-15 | Mobileye Technologies Ltd | COLLISION WARNING SYSTEM |
| DE102004048868A1 (en) * | 2004-10-07 | 2006-04-13 | Daimlerchrysler Ag | Method for detecting rear-end crash situations |
| DE102004062496A1 (en) | 2004-12-24 | 2006-07-06 | Daimlerchrysler Ag | A method of operating a collision avoidance or collision sequence mitigation system of a vehicle and collision avoidance or collision mitigation system |
| DE102005008974A1 (en) * | 2005-02-28 | 2006-08-31 | Robert Bosch Gmbh | Estimation of coordinates of object using velocity model, for pedestrian protection system, involves determining vehicle velocity and acceleration for second-order velocity model |
| DE102005012037A1 (en) | 2005-03-16 | 2006-09-28 | Daimlerchrysler Ag | A method of operating a collision avoidance or collision sequence mitigation system of a vehicle and collision avoidance or collision mitigation system |
| JP4297132B2 (en) * | 2006-05-12 | 2009-07-15 | トヨタ自動車株式会社 | Vehicle alarm device |
| DE102006053559B8 (en) * | 2006-11-14 | 2011-03-03 | Kamga Fopoussi, Jacques Jüdicaël, Dr.-Ing. | Commissioning of an emergency braking system in a workshop |
| DE102006053561B8 (en) * | 2006-11-14 | 2011-05-12 | Kamga Fopoussi, Jacques Jüdicaël, Dr.-Ing. | Method and device for checking an emergency braking system |
| DE102006053562B8 (en) * | 2006-11-14 | 2011-05-12 | Kamga Fopoussi, Jacques Jüdicaël, Dr.-Ing. | Functional test of an emergency braking system |
| DE102007060862B4 (en) | 2007-12-18 | 2021-08-12 | Man Truck & Bus Se | Emergency braking system |
| WO2010045921A1 (en) | 2008-10-22 | 2010-04-29 | Continental Teves Ag & Co. Ohg | Driver assistance system for a motor vehicle |
| DE102010049351A1 (en) | 2010-10-23 | 2012-04-26 | Daimler Ag | A method of operating a brake assist device and brake assist device for a vehicle |
| DE102011007775A1 (en) * | 2011-04-20 | 2012-10-25 | Robert Bosch Gmbh | A method for increasing the safety during operation of a vehicle, apparatus for carrying out such a method and vehicle comprising such a device |
| DE102012002926B4 (en) | 2012-02-14 | 2022-06-02 | Audi Ag | Method for operating a driver assistance system for longitudinal guidance of a motor vehicle |
| SE1250180A1 (en) * | 2012-02-28 | 2013-08-29 | Scania Cv Ab | Procedure and system for emergency braking of motor vehicles |
| DE102012007388A1 (en) * | 2012-04-11 | 2013-10-17 | Gm Global Technology Operations, Llc | A warning system with a vehicle warning signal generator and a method for warning occupants of a vehicle |
| CN103569084B (en) * | 2012-08-03 | 2015-12-16 | 能晶科技股份有限公司 | Driving detection device and method thereof |
| JP5842863B2 (en) | 2013-05-14 | 2016-01-13 | 株式会社デンソー | Collision mitigation device |
| EP2840007B1 (en) | 2013-08-22 | 2018-04-04 | Honda Research Institute Europe GmbH | Consistent behaviour generation of a predictive advanced driver assistant system |
| DE102014004622A1 (en) | 2014-03-29 | 2015-10-01 | Daimler Ag | Method and device at least for reducing a collision severity of a vehicle and vehicle |
| DE102017111003A1 (en) * | 2017-05-19 | 2018-11-22 | Wabco Europe Bvba | Method for determining autonomous emergency braking, method for performing emergency braking, and control system for a vehicle dynamics system |
| DE102017111004A1 (en) * | 2017-05-19 | 2018-11-22 | Wabco Europe Bvba | Method and control device for autonomous emergency braking of an own vehicle |
| CN108860125B (en) | 2017-08-30 | 2020-04-21 | 长城汽车股份有限公司 | An emergency braking control method, device and ECU |
| DE102018001055A1 (en) * | 2017-12-08 | 2019-06-13 | Knorr-Bremse Systeme für Nutzfahrzeuge GmbH | Method for triggering an automatic emergency braking operation in a vehicle convoy |
| US11453397B2 (en) | 2018-01-18 | 2022-09-27 | Volkswagen Aktiengesellschaft | Assistance system for a vehicle |
| DE102018200821B4 (en) | 2018-01-18 | 2023-11-30 | Volkswagen Aktiengesellschaft | Assistance system for a vehicle |
| US11262755B2 (en) * | 2018-04-09 | 2022-03-01 | Toyota Motor Engineering & Manufacturing North America, Inc. | Driver assistance system for autonomously indicating vehicle user intent in response to a predefined driving situation |
| DE102019002787B4 (en) * | 2019-04-16 | 2024-09-19 | Daimler Truck AG | Method and device for automated emergency stopping |
| DE102019215101A1 (en) * | 2019-10-01 | 2021-04-01 | Robert Bosch Gmbh | Method and device for performing a distance or speed control function for a single-track motor vehicle |
| CN114148322B (en) * | 2022-01-04 | 2023-11-17 | 吉林大学 | Road surface adhesion self-adaptive pneumatic automatic emergency brake control method for commercial vehicle |
| DE102022111522A1 (en) * | 2022-05-09 | 2023-11-09 | Bayerische Motoren Werke Aktiengesellschaft | Method for operating a driver assistance system, processing device for controlling a driver assistance system and motor vehicle with a driver assistance system |
| CN117644842B (en) * | 2024-01-29 | 2024-04-19 | 交通运输部公路科学研究所 | A method for determining triggering form of automatic emergency braking system |
| DE102024206747A1 (en) * | 2024-07-18 | 2026-01-22 | Volkswagen Aktiengesellschaft | Method for operating a vehicle's driver assistance system to reduce or deactivate driver assistance functions |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3843818C1 (en) * | 1988-12-24 | 1990-05-10 | Daimler-Benz Aktiengesellschaft, 7000 Stuttgart, De | |
| DE4101759A1 (en) * | 1990-01-29 | 1991-08-22 | Nissan Motor | AUTOMATIC BRAKE SYSTEM FOR A VEHICLE |
| DE19921238A1 (en) * | 1998-05-07 | 1999-11-18 | Honda Motor Co Ltd | Safety driving control system for a road vehicle |
| DE19911902C1 (en) * | 1999-03-17 | 2000-08-03 | Daimler Chrysler Ag | Variable adjustment of the brake pressure in a vehicle hydraulic brake system compares the actual and nominal friction values for increase by a correction factor if the actual value is low |
-
2002
- 2002-12-16 DE DE10258617A patent/DE10258617B4/en not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3843818C1 (en) * | 1988-12-24 | 1990-05-10 | Daimler-Benz Aktiengesellschaft, 7000 Stuttgart, De | |
| DE4101759A1 (en) * | 1990-01-29 | 1991-08-22 | Nissan Motor | AUTOMATIC BRAKE SYSTEM FOR A VEHICLE |
| DE19921238A1 (en) * | 1998-05-07 | 1999-11-18 | Honda Motor Co Ltd | Safety driving control system for a road vehicle |
| DE19911902C1 (en) * | 1999-03-17 | 2000-08-03 | Daimler Chrysler Ag | Variable adjustment of the brake pressure in a vehicle hydraulic brake system compares the actual and nominal friction values for increase by a correction factor if the actual value is low |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102010006762A1 (en) | 2010-02-04 | 2011-08-04 | Bayerische Motoren Werke Aktiengesellschaft, 80809 | Method for automatic braking of a vehicle for collision avoidance or collision following reduction |
| WO2011095510A1 (en) | 2010-02-04 | 2011-08-11 | Bayerische Motoren Werke Aktiengesellschaft | Method for automatically braking a vehicle for preventing a collision or minimizing the consequences of a collision |
| DE102010031038A1 (en) * | 2010-07-07 | 2012-01-12 | Robert Bosch Gmbh | Method for assisting a driver of a motor vehicle |
| EP2407358A1 (en) | 2010-07-17 | 2012-01-18 | MAN Truck & Bus AG | Method for executing an emergency brake procedure on a vehicle |
| DE102010027449A1 (en) | 2010-07-17 | 2012-01-19 | Man Truck & Bus Ag | Method for carrying out an emergency braking operation of a vehicle |
| DE102010033008A1 (en) | 2010-07-31 | 2011-03-17 | Daimler Ag | Method for operating collision preventing system of vehicle, involves recording present driving area between vehicle and potential collision partner by recording unit |
| DE102010041147A1 (en) | 2010-09-21 | 2012-03-22 | Continental Teves Ag & Co. Ohg | Method and system for reducing a reaction dead time of a vehicle safety control device |
| WO2013064705A1 (en) | 2012-02-14 | 2013-05-10 | Wabco Gmbh | Method for determining an emergency braking situation of a vehicle |
| EP2814704B1 (en) | 2012-02-14 | 2016-07-20 | WABCO GmbH | Method for determining an emergency braking situation of a vehicle |
| US9566959B2 (en) | 2012-02-14 | 2017-02-14 | Wabco Gmbh | Method for determining an emergency braking situation of a vehicle |
| DE102012002695B4 (en) | 2012-02-14 | 2024-08-01 | Zf Cv Systems Hannover Gmbh | Procedure for determining an emergency braking situation of a vehicle |
| DE102012014624A1 (en) | 2012-07-24 | 2013-01-31 | Daimler Ag | Method for collision prevention or collision sequence reduction for person guided motor vehicle, involves triggering warning and/or autonomous emergency braking at object when presence of straight-on driving position of vehicle is detected |
| EP3153376A2 (en) | 2015-10-08 | 2017-04-12 | Volkswagen Aktiengesellschaft | Method and device for determining the adaptive reaction time of a driver of a motor vehicle |
| DE102015219465A1 (en) | 2015-10-08 | 2017-04-13 | Volkswagen Aktiengesellschaft | Method and device for determining the adaptive reaction time of the driver of a motor vehicle |
Also Published As
| Publication number | Publication date |
|---|---|
| DE10258617A1 (en) | 2004-04-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE10258617B4 (en) | Method and device for triggering an automatic emergency braking operation of a vehicle | |
| EP1539523B1 (en) | Method and device for triggering an automatic emergency braking process of a vehicle | |
| DE102010051203B4 (en) | Method for detecting critical driving situations in trucks or passenger vehicles, in particular for avoiding collisions | |
| EP1559607B1 (en) | Method for vehicle collision warning. | |
| EP2814704B2 (en) | Method for determining an emergency braking situation of a vehicle | |
| DE102007039039B4 (en) | Control of safety means of a motor vehicle | |
| DE102008045481A1 (en) | Automatic emergency brake action triggering method for e.g. bus, involves implementing driver warning in form of partial brake actions of vehicle with predetermined, continuous increasing partial brake delay | |
| WO2018046266A1 (en) | Device for warning a vehicle driver of a vehicle about an object, and vehicle having such a device | |
| DE102004038734A1 (en) | Method and device for triggering emergency braking | |
| WO2003076226A1 (en) | Cruise control system having a stop & go function | |
| DE102015104547A1 (en) | Method for triggering an automatic emergency braking operation with a variable warning period | |
| DE102005012037A1 (en) | A method of operating a collision avoidance or collision sequence mitigation system of a vehicle and collision avoidance or collision mitigation system | |
| DE102009038421B4 (en) | Motor vehicle | |
| DE102014008487A1 (en) | Method for operating a vehicle | |
| DE10335738A1 (en) | Vehicle driver assistance method for emergency braking process, warning driver about high, medium or low risk of collision depending on position and traveling speed of detected obstacle | |
| DE102005054064A1 (en) | Method for avoiding collision of vehicles, involves computation of braking distance, which is based on evaluation of equation of motion, which depend on acceptance of time-dependent hypothetical acceleration profile | |
| EP2900528A1 (en) | Method and device for operating a vehicle and vehicle having such a device | |
| DE102016004852A1 (en) | Method for operating a vehicle | |
| DE102013225906A1 (en) | Motor vehicle with collision warning | |
| DE102011103604A1 (en) | Method for supporting driver of motor car during oncoming traffic situation, involves comparing operation quality of accelerator pedals of motor car with set of criteria for recognizing strong acceleration request | |
| EP3363705B1 (en) | Method for activating at least one function of a motor vehicle, driver assistance system and motor vehicle | |
| DE102015214748A1 (en) | Brake assistant for controlling an automatic deceleration of a motor vehicle | |
| DE102019104464A1 (en) | System and method for automated driving and for automated reverse parking in a parking space from automated driving | |
| EP2219923A1 (en) | Control device | |
| DE102016113939A1 (en) | Viewing direction recognition for a driver assistance system of a motor vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| OP8 | Request for examination as to paragraph 44 patent law | ||
| 8127 | New person/name/address of the applicant |
Owner name: DAIMLERCHRYSLER AG, 70327 STUTTGART, DE |
|
| 8364 | No opposition during term of opposition | ||
| 8327 | Change in the person/name/address of the patent owner |
Owner name: DAIMLER AG, 70327 STUTTGART, DE |
|
| R119 | Application deemed withdrawn, or ip right lapsed, due to non-payment of renewal fee |