DE102020212044A1 - Control device for a mobile robot - Google Patents
Control device for a mobile robot Download PDFInfo
- Publication number
- DE102020212044A1 DE102020212044A1 DE102020212044.7A DE102020212044A DE102020212044A1 DE 102020212044 A1 DE102020212044 A1 DE 102020212044A1 DE 102020212044 A DE102020212044 A DE 102020212044A DE 102020212044 A1 DE102020212044 A1 DE 102020212044A1
- Authority
- DE
- Germany
- Prior art keywords
- robot
- light
- control device
- distance
- floor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4011—Regulation of the cleaning machine by electric means; Control systems and remote control systems therefor
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/04—Automatic control of the travelling movement; Automatic obstacle detection
Landscapes
- Manipulator (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
Eine Steuervorrichtung (100) für einen fahrbaren Roboter (105) umfasst eine Lichtquelle zur Aussendung von Licht in einem Umfeld des Roboters (105); einen Lichtsensor zur Erfassung von Licht; eine optische Faser zur Führung von ausgesandtem Licht, das an einem Objekt im Umfeld des Roboters (105) reflektiert wurde, von einer vorbestimmten Empfangsposition am Roboter (105) zum Lichtsensor; eine Einrichtung (160) zur Bestimmung eines Abstands des Objekts von der Empfangsposition auf der Basis des ausgesandten und des erfassten Lichts; und eine Verarbeitungseinrichtung zum Steuern des Roboters (105) über einen Boden in Abhängigkeit des bestimmten Abstands.
Description
Die vorliegende Erfindung betrifft eine Steuervorrichtung für einen fahrbaren Roboter. Insbesondere betrifft die Erfindung die Steuerung des Roboters in Abhängigkeit eines Abstands zu einem Hindernis.The present invention relates to a control device for a traveling robot. In particular, the invention relates to the control of the robot as a function of a distance from an obstacle.
Ein automatischer Staubsauger ist dazu eingerichtet, in einem vorbestimmten Bereich über einen Boden zu fahren und diesen mittels eines Saugwerks zu reinigen. Um zu verhindern, dass der automatische Staubsauger sich selbst oder ein Objekt beschädigt oder eine Person oder ein Haustier verletzt, kann er über verschiedene Sensoren zur Abtastung seines Umfelds verfügen.An automatic vacuum cleaner is set up to move over a floor in a predetermined area and to clean it by means of a suction mechanism. In order to prevent the automatic vacuum cleaner from damaging itself or an object, or injuring a person or pet, it can have various sensors to scan its surroundings.
Ein solcher Sensor umfasst einen Absturzsensor, um dafür zu sorgen, dass der automatische Staubsauger keinen Sturzschaden erleidet, beispielsweise wenn er über das obere Ende einer Treppe oder seitlich von einer Begrenzung einer Galerie fährt. Der Absturzsensor ist an der Unterseite des Staubsaugers angebracht und bestimmt einen Abstand zum Boden. Die Bestimmung erfolgt üblicherweise berührungslos mittels Lichts. Unterschiedliche Messprinzipien basieren beispielsweise auf Triangulation oder der Ausbreitungsgeschwindigkeit von Licht (time of flight, ToF). Dabei wird üblicherweise Licht ausgestrahlt, am Boden reflektiert und wieder empfangen. Überschreitet eine bestimmte Entfernung zwischen dem Sensor und einem das Licht reflektierenden Objekt einen vorbestimmten Schwellenwert, so kann der Staubsauger angehalten werden.One such sensor includes a fall sensor to ensure that the automatic vacuum cleaner does not suffer fall damage, for example when driving over the top of a staircase or to the side of a gallery border. The fall sensor is attached to the bottom of the vacuum cleaner and determines a distance to the floor. The determination is usually carried out without contact using light. Different measurement principles are based, for example, on triangulation or the propagation speed of light (time of flight, ToF). Light is usually emitted, reflected on the ground and received again. If a certain distance between the sensor and an object reflecting the light exceeds a predetermined threshold value, the vacuum cleaner can be stopped.
Derartige Sensoren können signifikante Kostenfaktoren für den automatischen Staubsauger darstellen. Durch ihren Anbringungsort und ihrer geringen Abmessungen können sie einer erheblichen Verschmutzungsgefahr ausgesetzt sein, sodass die Entfernungsbestimmung durch Schmutz gestört oder verhindert werden kann. Es wurde vorgeschlagen, einen optischen Absturzsensor in einem separaten Gehäuse anzuordnen, das leichter gereinigt werden kann. Das Gehäuse und seine Anbringung können jedoch zusätzliche Kosten für Material oder Montage nach sich ziehen.Such sensors can represent significant cost factors for the automatic vacuum cleaner. Due to their place of attachment and their small dimensions, they can be exposed to a considerable risk of contamination, so that the distance determination can be disrupted or prevented by dirt. It has been proposed to place an optical crash sensor in a separate housing that is easier to clean. However, the housing and its attachment may entail additional costs for materials or assembly.
Eine der vorliegenden Erfindung zu Grunde liegende Aufgabe besteht in der Angabe einer verbesserten Steuervorrichtung für einen fahrbaren Roboter in Abhängigkeit eines bestimmten Abstands zu einem Objekt in dessen Umfeld. Die Erfindung löst diese Aufgabe mittels der Gegenstände der unabhängigen Ansprüche. Unteransprüche geben bevorzugte Ausführungsformen wieder.One of the objects on which the present invention is based is to specify an improved control device for a mobile robot depending on a specific distance from an object in its environment. The invention solves this problem by means of the subject matter of the independent claims. Subclaims reflect preferred embodiments.
Nach einem ersten Aspekt der vorliegenden Erfindung umfasst eine Steuervorrichtung für einen fahrbaren Roboter eine Lichtquelle zur Aussendung von Licht in einem Umfeld des Roboters; einen Lichtsensor zur Erfassung von Licht; eine optische Faser zur Führung von ausgesandtem Licht, das an einem Objekt im Umfeld des Roboters reflektiert wurde, von einer vorbestimmten Empfangsposition am Roboter zum Lichtsensor; eine Einrichtung zur Bestimmung eines Abstands des Objekts von der Empfangsposition auf der Basis des ausgesandten und des erfassten Lichts; und eine Verarbeitungseinrichtung zum Steuern des Roboters über einen Boden in Abhängigkeit des bestimmten Abstands.According to a first aspect of the present invention, a control device for a mobile robot includes a light source for emitting light around the robot; a light sensor for detecting light; an optical fiber for guiding emitted light reflected on an object around the robot from a predetermined receiving position on the robot to the light sensor; means for determining a distance of the object from the receiving position based on the emitted light and the detected light; and processing means for controlling the robot over a floor depending on the determined distance.
Durch Verwendung einer optischen Faser zwischen der Empfangsposition und dem Lichtsensor kann dieser verbessert vor Verschmutzung, Abrasion oder Kollision geschützt sein. Der Lichtsensor kann an einer geschützten Stelle im Inneren des fahrbaren Roboters angebracht sein, und die optische Faser kann von dort leicht zu der Empfangsposition geführt werden. Ein Ende der Faser, an der Licht eintreten kann, kann einfach am fahrbaren Roboter angebracht werden, sodass die Empfangsposition erleichtert gewählt werden kann.By using an optical fiber between the receiving position and the light sensor, it can be better protected against dirt, abrasion or collision. The light sensor can be installed in a protected place inside the wheeled robot, and the optical fiber can be easily routed from there to the receiving position. An end of the fiber where light can enter can be easily attached to the wheeled robot, making it easier to choose the receiving position.
Es ist besonders bevorzugt, dass die Entfernung auf der Basis der fokusinduzierten Fotoreaktion (Focus-Induced Photoresponse, FIP) bestimmt wird. Ein entsprechender Sensor zur FIP-basierten Entfernungsmessung mittels einer optischen Faser ist unter der Bezeichnung „trinamiX fiber optic sensor“ erhältlich. Das zu Grunde liegende Messprinzip ist beispielsweise in WO 2012 / 110 924 A1 genauer dargelegt. Eine solche Bestimmung kann weder eine Triangulation noch eine Laufzeitmessung von Licht erfordern. Die Messung kann robust gegenüber einer Farbe eines Untergrundes, einer verwendeten Lichtintensität oder einer Verschmutzung des optischen Pfads sein. Eine Bestimmung von Abständen im Bereich von ca. 0 bis ca. 150 Millimetern kann zuverlässig und mit hoher Präzision durchgeführt werden.It is particularly preferred that the distance is determined on the basis of focus-induced photoresponse (FIP). A corresponding sensor for FIP-based distance measurement using an optical fiber is available under the name "trinamiX fiber optic sensor". The underlying measurement principle is explained in more detail in WO 2012/110 924 A1, for example. Such a determination may require neither triangulation nor time-of-flight measurement of light. The measurement can be robust to a background color, a light intensity used or contamination of the optical path. A determination of distances in the range from about 0 to about 150 millimeters can be carried out reliably and with high precision.
In einer Ausführungsform kann sich die Lichtquelle unmittelbar an einer Austrittsposition am Roboter befinden. In einer anderen Ausführungsform umfasst die Steuervorrichtung eine weitere optische Faser zur Führung von Licht, das von der Lichtquelle ausgesandt wurde, an die vorbestimmte Austrittsposition am Roboter. Dadurch kann auch die Lichtquelle an einer geschützten Stelle im Inneren des Roboters angebracht werden. Die Lichtquelle kann im Bereich des Lichtsensors angeordnet werden, sodass optoelektronische Bauteile verbessert miteinander integriert werden können.In one embodiment, the light source can be located directly at an exit position on the robot. In another embodiment, the control device comprises a further optical fiber for guiding light emitted by the light source to the predetermined exit position on the robot. This also allows the light source to be installed in a protected place inside the robot. The light source can be arranged in the area of the light sensor, so that optoelectronic components can be integrated with one another in an improved manner.
Die Austrittsposition und die Empfangsposition liegen bevorzugt am Roboter nahe aneinander. Zu diesem Zweck kann ein Halteelement vorgesehen sein, das dazu eingerichtet ist, Enden der Fasern am Roboter derart anzubringen, dass die Austrittsposition in einem vorbestimmten Abstand zur Empfangsposition liegt. Das Halteelement kann ausschließlich optische Elemente umfassen und nach optischen oder mechanischen Gesichtspunkten gehandhabt und am Roboter angebracht werden. Die Bestimmung des Abstands zum Objekt kann weder von einer Verformung der Fasern, noch von elektromagnetischen Einflüssen auf die Fasern oder im Bereich des Halteelements beeinträchtigt sein. Der vorbestimmte Abstand liegt bevorzugt in einem Bereich zwischen wenigen Millimetern und ca. einem Zentimeter. In einer weiteren Ausführungsform kann das Halteelement anstelle des Endes der weiteren Faser auch die Lichtquelle aufnehmen.The exit position and the receiving position are preferably close to each other on the robot. For this purpose, a holding element can be provided which is designed to hold ends of the fibers to be attached to the robot in such a way that the exit position is at a predetermined distance from the receiving position. The holding element can exclusively comprise optical elements and can be handled and attached to the robot according to optical or mechanical aspects. The determination of the distance to the object cannot be impaired either by a deformation of the fibers or by electromagnetic influences on the fibers or in the area of the holding element. The predetermined distance is preferably in a range between a few millimeters and approximately one centimeter. In a further embodiment, the holding element can also accommodate the light source instead of the end of the additional fiber.
In einer besonders bevorzugten Ausführungsform ist die Steuervorrichtung dazu eingerichtet, mehrere Abstände zu Objekten im Bereich des Roboters zu bestimmen. Dazu kann die Steuervorrichtung mehrere Lichtquellen umfassen, wobei jede Lichtquelle dazu eingerichtet ist, einen vorbestimmten Abschnitt des Umfelds zu beleuchten. Jeder Lichtquelle kann eine optische Faser zugeordnet sein, die dazu eingerichtet ist, nur Licht zum Lichtsensor zu führen, das in dem Abschnitt reflektiert wurde, der durch die Lichtquelle beleuchtet wird, die der Faser zugeordnet ist. Auf diese Weise können Abstände zu Objekten in den mehreren Abschnitten mittels nur eines Lichtsensors durchgeführt werden. Die Lichtquellen können sequentiell aktiviert werden, um zu jedem Zeitpunkt nur eine Entfernungsmessung in einem der Abschnitte durchzuführen. Die Abschnitte sind bevorzugt überlappungsfrei (disjunkt), sodass Licht einer ersten Lichtquelle nicht an einem Objekt reflektiert und in eine optische Faser eindringen kann, die einer anderen Lichtquelle zugeordnet ist.In a particularly preferred embodiment, the control device is set up to determine a number of distances to objects in the area of the robot. For this purpose, the control device can include a plurality of light sources, each light source being set up to illuminate a predetermined section of the environment. Each light source may have associated therewith an optical fiber arranged to guide only light reflected in the portion illuminated by the light source associated with the fiber to the light sensor. In this way, distances to objects in the multiple sections can be determined using only one light sensor. The light sources can be activated sequentially to perform only one ranging in one of the sections at any one time. The sections are preferably non-overlapping (disjoint) so that light from a first light source does not reflect off an object and can enter an optical fiber associated with another light source.
Insbesondere ist bevorzugt, dass die Abschnitte in verschiedenen Raumrichtungen bezüglich des Roboters liegen. Dadurch können unterschiedliche Messrichtungen gebildet sein, die jeweils zwischen dem Roboter und dem Objekt liegen können. Genauer gesagt kann sich eine Messrichtung zwischen einem ersten Ort am Roboter, an welchem die Austrittsposition und die Empfangsposition liegen, und einem zweiten Ort am Objekt, wo das Licht reflektiert wird, erstrecken. Die Raumrichtungen können ein kartesisches Koordinatensystem, insbesondere ein Rechtssystem, bezüglich Fahrzeugachsen des Roboters umfassen. Die Fahrzeugachsen können insbesondere eine Längsachse, eine Querachse und eine Hochachse umfassen. Messrichtungen unterschiedlicher Abschnitte können einen Winkel von ca. 90° miteinander einschließen.In particular, it is preferred that the sections lie in different directions in space with respect to the robot. As a result, different measurement directions can be formed, each of which can lie between the robot and the object. More specifically, a measurement direction can extend between a first location on the robot, where the exit position and the reception position are, and a second location on the object, where the light is reflected. The spatial directions can include a Cartesian coordinate system, in particular a right-hand system, with respect to the vehicle axes of the robot. The vehicle axes can in particular include a longitudinal axis, a transverse axis and a vertical axis. Measuring directions of different sections can enclose an angle of approx. 90° with each other.
Bevorzugt verlaufen eine erste Messrichtung in einer horizontalen Richtung und eine zweite in einer vertikalen Richtung bezüglich des Roboters. Insbesondere dann, wenn eine Austrittsposition und eine zugeordnete Empfangsposition nahe beieinander liegen, können sich das ausgesandte und das reflektierte Licht in einem relativ engen Korridor ausbreiten, sodass eine Beeinflussung durch Fremdlicht unwahrscheinlich ist. Zur Fokussierung des ausgesandten Lichts kann die Lichtquelle eine Leuchtdiode oder einen Laser umfassen. Im Bereich der Austrittsposition und/oder der Empfangsposition kann eine fokussierende Optik vorgesehen sein, beispielsweise ein Kollimator.A first measuring direction preferably runs in a horizontal direction and a second in a vertical direction with respect to the robot. In particular when an exit position and an associated receiving position are close to one another, the emitted and reflected light can propagate in a relatively narrow corridor, so that it is unlikely that they will be influenced by extraneous light. To focus the emitted light, the light source can include a light-emitting diode or a laser. Focusing optics, for example a collimator, can be provided in the area of the exit position and/or the receiving position.
Es ist besonders bevorzugt, dass ein erster Abschnitt horizontal und ein zweiter Abschnitt vertikal gegenüber dem Roboter versetzt ist. Ein Seitenabschnitt, insbesondere der erste, horizontal versetzte Abschnitt, kann neben dem Roboter liegen, wobei die Verarbeitungseinrichtung dazu eingerichtet ist, den Roboter derart über den Boden zu steuern, dass ein vorbestimmter Abstand zu einem Objekt im Seitenabschnitt eingehalten ist. Umfasst das Objekt beispielsweise einen länglichen Gegenstand wie eine Wand, so kann der Roboter im vorbestimmten Abstand an der Wand entlanggefahren werden. Die Messeinheit kann somit als Wandfolgesensor arbeiten.It is particularly preferred that a first section is offset horizontally and a second section is offset vertically with respect to the robot. A side section, in particular the first, horizontally offset section, can lie next to the robot, with the processing device being set up to steer the robot over the floor in such a way that a predetermined distance from an object in the side section is maintained. For example, if the object includes an elongated object such as a wall, the robot can be moved along the wall at a predetermined distance. The measuring unit can thus work as a wall following sensor.
Ein Bodenabschnitt, insbesondere ein zweiter, vertikal gegenüber dem Roboter versetzter Abschnitt, kann unterhalb des Roboters liegen, wobei die Verarbeitungseinrichtung dazu eingerichtet ist, den Roboter derart über den Boden zu steuern, dass ein Überfahren einer Stufe oder Schwelle im Bodenabschnitt vermieden wird. Insbesondere dann, wenn die Stufe oder Schwelle nach Betrag oder Gradient ein vorbestimmtes Maß überschreitet, kann eine Bewegung des Roboters so abgeändert werden, dass ein Absturz oder ein Steckenbleiben vermieden werden. Insbesondere kann der Roboter angehalten und bei Bedarf in der entgegengesetzten Richtung in Sicherheit gebracht werden.A floor section, in particular a second section offset vertically with respect to the robot, can lie below the robot, with the processing device being set up to control the robot over the floor in such a way that driving over a step or threshold in the floor section is avoided. In particular, if the level or threshold exceeds a predetermined amount or gradient, a movement of the robot can be modified in such a way that a crash or getting stuck are avoided. In particular, the robot can be stopped and, if necessary, taken to safety in the opposite direction.
Nach einem zweiten Aspekt der vorliegenden Erfindung umfasst ein Roboter eine hierin beschriebene Steuervorrichtung.According to a second aspect of the present invention, a robot comprises a control device as described herein.
Der Roboter kann insbesondere ein Haushaltsgerät umfassen. Insbesondere kann der Roboter zum autonomen Befahren des Bodens eingerichtet sein und über eine Vorrichtung zur Bearbeitung des Bodens verfügen. Eine solche Bodenbearbeitungsvorrichtung kann beispielsweise eine Wischeinrichtung, eine Kehreinrichtung, eine Saugeinrichtung oder ein Schneidwerk umfassen. Das Haushaltsgerät kann etwa einen Reinigungsroboter oder einen automatischen Rasenmäher umfassen. Die Verarbeitungseinrichtung ist bevorzugt dazu eingerichtet, den Roboter in einer vorbestimmten Weise über den Boden zu führen, um diesen mittels der Bodenbearbeitungsvorrichtung zu bearbeiten. Der Roboter ist üblicherweise dazu eingerichtet, den Boden in einer vorbestimmten Weise zu befahren, um zumindest vorbestimmte Bereiche möglichst flächendeckend zu bearbeiten.In particular, the robot can include a household appliance. In particular, the robot can be set up to drive over the floor autonomously and have a device for working the floor. Such a soil treatment device can, for example, comprise a wiping device, a sweeping device, a suction device or a cutter. The household appliance can include a cleaning robot or an automatic lawn mower, for example. The processing device is preferably set up to guide the robot in a predetermined manner over the floor in order to use the floor bearer processing device. The robot is usually set up to travel over the floor in a predetermined manner in order to process at least predetermined areas as extensively as possible.
Die Erfindung wird nun unter Bezug auf die beiliegenden Figuren genauer beschrieben, in denen:
-
1 eine Steuervorrichtung für einen fahrbaren Roboter; und -
2 einen fahrbaren Roboter mit einer Steuervorrichtung
darstellt.The invention will now be described in more detail with reference to the accompanying figures, in which:
-
1 a controller for a traveling robot; and -
2 a mobile robot with a control device
represents.
Die Steuervorrichtung 100 umfasst eine oder mehrere Messeinheiten 120, mittels denen unabhängige Abstandsmessungen, etwa zu einem Objekt 115, durchgeführt werden können. Eine im unteren linken Bereich von
Eine Entfernung des Objekts 115 von den Positionen 145, 150 am Halteelement 155 wird bevorzugt mittels des Prinzips der fokusinduzierten Fotoreaktion bestimmt. Dabei kann eine Oberfläche des Objekts 115 mittels der Lichtquelle 125 beleuchtet werden. Der Lichtsensor 130 kann zwei einzelne Sensoren umfassen, die bezüglich einer Abbildungsoptik, insbesondere einer Kollimatorlinse, unterschiedliche Brennweiten einnehmen. In Abhängigkeit eines Abstands des Objekts 115 kann ein Lichtfleck, der auf die Sensoren projiziert ist, von diesen als unterschiedlich hell erfasst werden. Auf der Basis eines Verhältnisses von mittels der Sensoren bestimmten Helligkeiten kann der Abstand zum Objekt 115 bestimmt werden.A distance of the
In einer weiteren Ausführungsform ist eine Lichtquelle 125 am Halteelement 155 beziehungsweise an der Austrittsposition 150 einer Messeinheit 120 vorgesehen. In dieser Ausführungsform kann die zweite optische Faser 140 entfallen; stattdessen kann eine elektrische Leitung zur Bereitstellung von Energie für die Lichtquelle 125 vorgesehen sein.In a further embodiment, a
In der dargestellten Ausführungsform sind beispielhaft noch weitere Messeinheiten 120 vorgesehen. Derzeit erhältliche Messsysteme können bis zu fünf Messeinheiten 120 unterstützen. Jeder Messeinheit 120 können eine Lichtquelle 125, eine erste optische Faser 135, eine zweite optische Faser 140 und ein Halteelement 155 zugeordnet sein. Allerdings ist bevorzugt nur ein Lichtsensor 130 für alle umfassten Messeinheiten 120 vorgesehen. Erste optische Fasern 135 der einzelnen Messeinheiten 120 können alle zum selben Lichtsensor 130 führen. Zur Durchführung einer Messung wird bevorzugt zu jedem Zeitpunkt nur eine der Lichtquellen 125 aktiviert, die der gewünschten Messeinheit 120 zugeordnet ist. Die Messeinheiten 120 sind bevorzugt derart eingerichtet bzw. am Roboter 105 ausgerichtet, dass ihre Strahlengänge im Umfeld des Roboters 105 einander möglichst nicht überlappen. In einer anderen Ausführungsform können Messungen mit unterschiedlichen Messeinheiten 120 auch auf andere Weisen voneinander unterschieden werden, beispielsweise durch Modulieren des ausgesandten Lichts der einzelnen Messeinheiten 120 auf unterschiedliche Weisen und Bestimmen eines Messsignals mit der gewünschten Modulation am Lichtsensor 130. Beispielsweise können die Lichtquellen 125 unterschiedliche Lichtspektren verwenden oder mit unterschiedlichen Modulationsfrequenzen moduliert sein.In the embodiment shown, further measuring
Die einzelnen Abstände können mittels einer Einrichtung 160 bestimmt werden, die in einer Ausführungsform auch optoelektronische Bauelemente wie die Lichtquellen 125 oder den Lichtsensor 130 umfassen kann. Zusätzlich kann eine Verarbeitungseinrichtung 165 vorgesehen sein, um den Roboter 105 in Abhängigkeit eines oder mehrerer bestimmter Abstände zu steuern. Die Verarbeitungseinrichtung 165 kann mittels einer Schnittstelle 170 mit einem Antriebssystem, einem Lenksystem und/oder einem weiteren Abtastsystem für ein Umfeld des Roboters 105 verbunden werden. Optional umfasst die Verarbeitungseinrichtung 165 einen Kartenspeicher zur Aufnahme von Kartendaten, die ein Umfeld des Roboters 105 beschreiben. Kartendaten können auf der Basis von Informationen des Abtastsystems erzeugt oder mit bestehenden Kartendaten abgeglichen werden.The individual distances can be determined using a
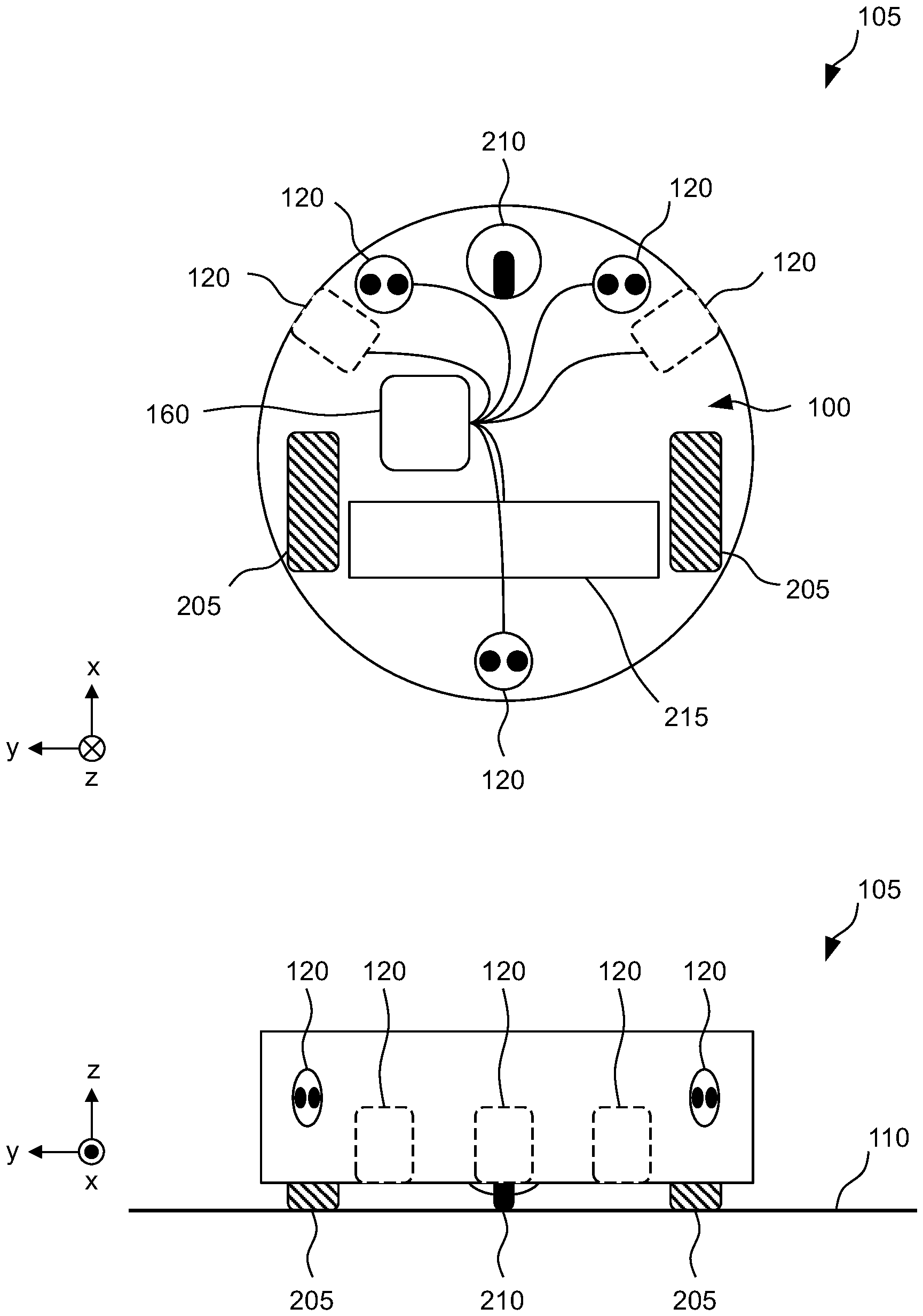
Zur Steuerung und Führung des Roboters 105 über den Boden 110 ist ein Fahrwerk vorgesehen, das in der dargestellten Ausführungsform beispielhaft zwei Antriebsräder 205 und ein ungelenktes Bugrad 210 umfasst. Die Antriebsräder 205 können in Richtung und Drehzahl unabhängig voneinander steuerbar sein, um den Roboter 105 zu lenken, zu drehen, zu beschleunigen oder abzubremsen. Zur Bearbeitung des Bodens 110 ist bevorzugt eine Bodenbearbeitungsvorrichtung 215 vorgesehen, die hier beispielhaft im Wesentlichen zwischen den Antriebsrädern 205 liegt.A chassis is provided for controlling and guiding the
In der dargestellten Ausführungsform sind fünf Messeinheiten 120 vorgesehen, die jeweils dazu eingerichtet sind, ein Objekt 115 in einer vorgesehenen, zugeordneten Messrichtung zu erfassen. Drei der Messeinheiten 120 haben vertikale Messrichtungen und sind nach unten gerichtet, sodass sie jeweils einen Abstand entlang der z-Achse zum Boden 110 bestimmen können. Auf der Basis dieser Abstandsmessungen kann bestimmt werden, wenn der Roboter 105 im Begriff ist, eine Stufe zu überfahren, sodass eine Absturzgefahr droht. Zwei weitere Messeinheiten 120 sind horizontal orientiert, sodass ihre Messrichtungen zumindest teilweise entlang der y-Achse verlaufen. Mit diesen Messeinheiten 120 kann ein Abstand zu einem Objekt 115 bestimmt werden. Ist das Objekt 115 länglich, so kann der Roboter 105 an dem Objekt 115 entlanggefahren werden, sodass ein Abstand zum Objekt 115 einen vorbestimmten Schwellenwert nicht unterschreitet. Das Objekt 115 kann dabei insbesondere eine Wand oder ein Möbelstück umfassen.In the embodiment shown, five measuring
BezugszeichenlisteReference List
- 100100
- Steuervorrichtungcontrol device
- 105105
- Roboterrobot
- 110110
- Bodenfloor
- 115115
- Objektobject
- 120120
- Messeinheitunit of measure
- 125125
- Lichtquellelight source
- 130130
- Lichtsensorlight sensor
- 135135
- erste optische Faserfirst optical fiber
- 140140
- zweite optische Fasersecond optical fiber
- 145145
- Empfangspositionreceiving position
- 150150
- Austrittspositionexit position
- 155155
- Halteelementholding element
- 160160
- Einrichtung zur Bestimmung des AbstandsDevice for determining the distance
- 165165
- Verarbeitungseinrichtungprocessing facility
- 170170
- Schnittstelleinterface
- 205205
- Antriebsraddrive wheel
- 210210
- Bugradnose wheel
- 215215
- Bodenbearbeitungsvorrichtungtillage device
Claims (11)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102020212044.7A DE102020212044B4 (en) | 2020-09-24 | 2020-09-24 | Control device for a mobile robot |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102020212044.7A DE102020212044B4 (en) | 2020-09-24 | 2020-09-24 | Control device for a mobile robot |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| DE102020212044A1 true DE102020212044A1 (en) | 2022-03-24 |
| DE102020212044B4 DE102020212044B4 (en) | 2025-06-18 |
Family
ID=80473711
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| DE102020212044.7A Active DE102020212044B4 (en) | 2020-09-24 | 2020-09-24 | Control device for a mobile robot |
Country Status (1)
| Country | Link |
|---|---|
| DE (1) | DE102020212044B4 (en) |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040020000A1 (en) | 2000-01-24 | 2004-02-05 | Jones Joseph L. | Robot obstacle detection system |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6081928B2 (en) * | 2011-02-15 | 2017-02-15 | ビーエーエスエフ ソシエタス・ヨーロピアBasf Se | Detector for optically detecting at least one object |
| US11219347B2 (en) * | 2017-12-22 | 2022-01-11 | Bissell Inc. | Robotic cleaner |
-
2020
- 2020-09-24 DE DE102020212044.7A patent/DE102020212044B4/en active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040020000A1 (en) | 2000-01-24 | 2004-02-05 | Jones Joseph L. | Robot obstacle detection system |
Non-Patent Citations (2)
| Title |
|---|
| Oili Pekkola et al.: Focus-Induced Photoresponse: a novel optoelectronic distance measurement technique; Cornell University arXiv.org; URL: "https://arxiv.org/abs/1708.05000" |
| trinamiX GmbH: Novel distance measurement technology by trinamiX, 14. Jun. 2019 - Flyer |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102020212044B4 (en) | 2025-06-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2764812B1 (en) | Cleaning robot | |
| EP2960741B1 (en) | Autonomous service robot | |
| DE112017000570B4 (en) | LASER RADAR DEVICE | |
| EP1970680B1 (en) | Optical sensor system for a fluid treatment device | |
| DE102019215017A1 (en) | VEHICLE AND METHOD FOR CONTROLLING THE SAME | |
| DE102011053975B4 (en) | Automatically movable cleaning device for cleaning floors | |
| EP1704766A1 (en) | Measuring device and method for the analysis of soil surface for a lawn treating robot | |
| EP0954773A1 (en) | Method and device for docking an autonomous mobile unit | |
| DE102011000250A1 (en) | Method for determining the position of a self-moving device | |
| DE112021002412T5 (en) | Vehicle guidance device, vehicle guidance method and parking area | |
| DE102017223658B4 (en) | LIDAR device (100) for detecting an object | |
| WO2018149708A1 (en) | Lidar sensor for detecting an object | |
| DE102013219473A1 (en) | Device for transporting components and component supply device for providing components in a staging area | |
| DE102013203659A1 (en) | vehicle device | |
| EP0718974A1 (en) | Proximity switch | |
| DE102014118056A1 (en) | Optoelectronic detection device for a motor vehicle and use of such a detection device | |
| DE102020212044B4 (en) | Control device for a mobile robot | |
| EP3077255B1 (en) | Illumination for detecting raindrops on a pane by means of a camera | |
| WO2002091095A1 (en) | Calibrating method | |
| DE102005010657B4 (en) | Object detecting device | |
| DE19907548C2 (en) | Optoelectronic device | |
| DE102018217484A1 (en) | Optical system with a pollution detection system, vehicle with an optical system and method for an optical system | |
| DE102021206645A1 (en) | Mobile floor cleaning device and method for operating the same | |
| DE102018217482A1 (en) | Optical system with a pollution detection system, vehicle with an optical system and method for an optical system | |
| DE202019102072U1 (en) | Spray boom for an agricultural sprayer |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| R012 | Request for examination validly filed | ||
| R016 | Response to examination communication | ||
| R016 | Response to examination communication | ||
| R016 | Response to examination communication | ||
| R018 | Grant decision by examination section/examining division |