DE102015012369A1 - System for influencing an adaptive chassis of a land vehicle - Google Patents
System for influencing an adaptive chassis of a land vehicle Download PDFInfo
- Publication number
- DE102015012369A1 DE102015012369A1 DE102015012369.6A DE102015012369A DE102015012369A1 DE 102015012369 A1 DE102015012369 A1 DE 102015012369A1 DE 102015012369 A DE102015012369 A DE 102015012369A DE 102015012369 A1 DE102015012369 A1 DE 102015012369A1
- Authority
- DE
- Germany
- Prior art keywords
- vehicle
- flying object
- chassis
- data
- adaptive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/016—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input
- B60G17/0165—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input to an external condition, e.g. rough road surface, side wind
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/018—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the use of a specific signal treatment or control method
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/019—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the type of sensor or the arrangement thereof
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0238—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using obstacle or wall sensors
- G05D1/024—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using obstacle or wall sensors in combination with a laser
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0242—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using non-visible light signals, e.g. IR or UV signals
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
- G05D1/0251—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means extracting 3D information from a plurality of images taken from different locations, e.g. stereo vision
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0257—Control of position or course in two dimensions specially adapted to land vehicles using a radar
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/80—Exterior conditions
- B60G2400/82—Ground surface
- B60G2400/821—Uneven, rough road sensing affecting vehicle body vibration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2401/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60G2401/14—Photo or light sensitive means, e.g. Infrared
- B60G2401/142—Visual Display Camera, e.g. LCD
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2500/00—Indexing codes relating to the regulated action or device
- B60G2500/10—Damping action or damper
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- General Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Automation & Control Theory (AREA)
- Electromagnetism (AREA)
- Mechanical Engineering (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Multimedia (AREA)
- Optics & Photonics (AREA)
- Traffic Control Systems (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
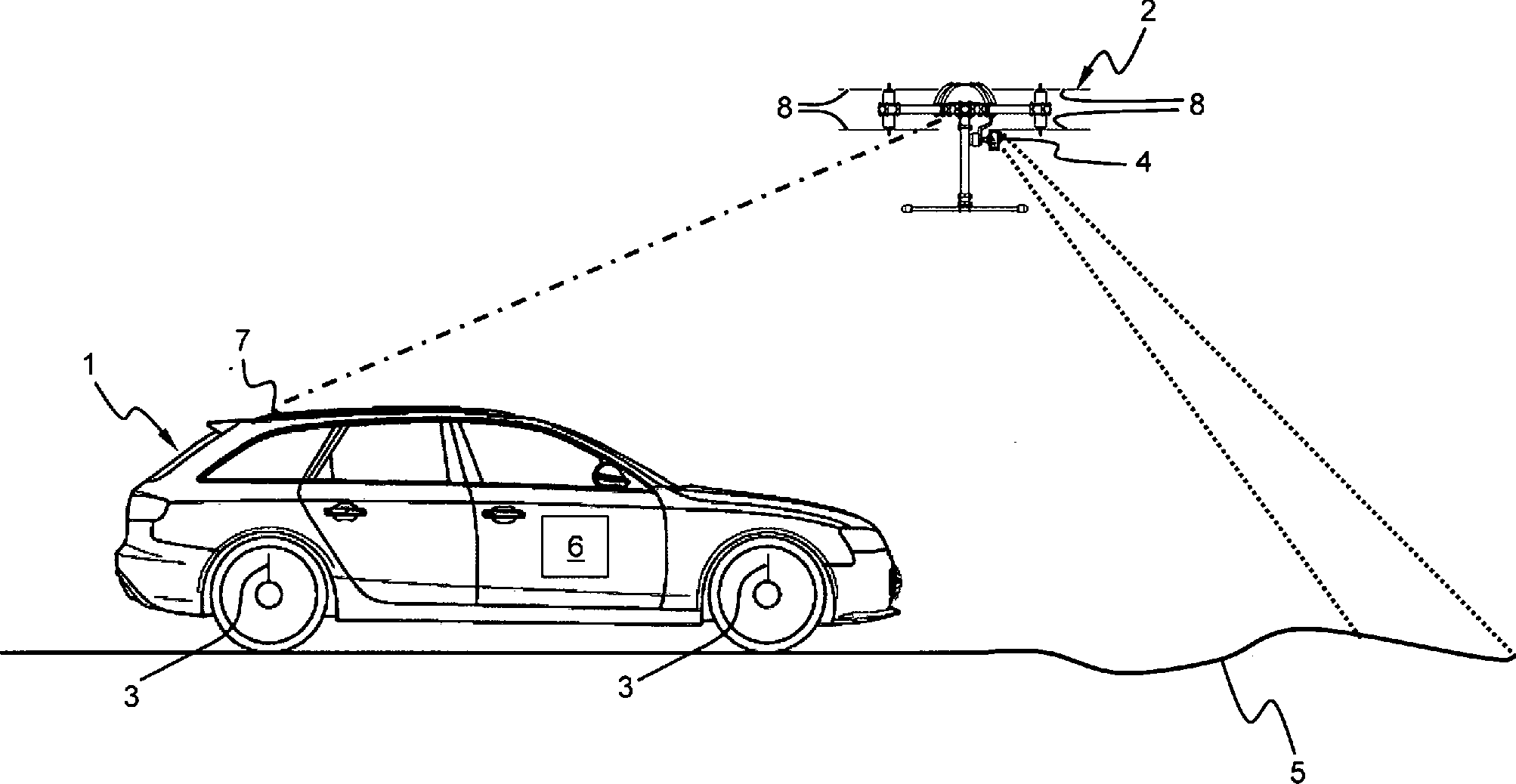
System zum Beeinflussen eines adaptiven Fahrwerks (3) eines landgebundenen Fahrzeugs (1), wobei dem Fahrzeug (1) zumindest zeitweise ein unbemanntes und sich zumindest teil-autonom bewegendes Flugobjekt (2) zugeordnet ist, das mittels zumindest einer Umfeldwahrnehmungseinrichtung (4) eine Beschaffenheit eines Untergrunds (5) repräsentierende Daten in seinem Umfeld erfassen und mit einer fahrzeugseitigen Empfangseinrichtung (7) austauschen kann, wobei das Fahrzeug (1) eine Fahrwerkssteuereinrichtung (6) aufweist, die zumindest einen Betriebsparameter des adaptiven Fahrwerks (3) beeinflussen kann und wobei die Fahrwerkssteuereinrichtung (6) von der Empfangseinrichtung (7) die eine Beschaffenheit eines Untergrunds (5) repräsentierenden Daten erhält und in Abhängigkeit dieser Daten den zumindest einen Betriebsparameter beeinflusst.System for influencing an adaptive chassis (3) of a land-bound vehicle (1), the vehicle (1) at least temporarily an unmanned and at least partially-autonomously moving flying object (2) is assigned, the means of at least one environment perception device (4) a nature The vehicle (1) comprises a chassis control device (6), which can influence at least one operating parameter of the adaptive chassis (3) and wherein the Chassis control device (6) of the receiving device (7) receives the data representing a condition of a background (5) and in dependence of this data affects the at least one operating parameter.
Description
Die vorliegende Erfindung betrifft ein System zum Beeinflussen eines adaptiven Fahrwerks eines landgebundenen Fahrzeugs gemäß dem Oberbegriff des Patentanspruchs 1.The present invention relates to a system for influencing an adaptive chassis of a land-based vehicle according to the preamble of patent claim 1.
Als landgebundene Fahrzeuge im Sinne der vorliegenden Erfindung sollen in erster Linie Kraftfahrzeuge, insbesondere vierrädrige Automobile, verstanden werden. Diese verfügen über ein Fahrwerk, das die über die Fahrbahn rollenden Räder gegenüber dem Fahrzeugaufbau abstützt. Dazu ist jedem Rad bevorzugt eine Feder-Dämpfer-Anordnung zugewiesen. Bei modernen Fahrzeugen ist es vermehrt üblich, dass die Feder und/oder der Dämpfer in ihrem Verhalten angepasst werden können bzw. sogar aktiv eine Kraft durch diese gestellt werden kann. Zur Konfiguration des adaptiven Fahrwerks sind möglichst genaue Informationen über den zu befahrenden Streckenabschnitt erforderlich, so dass der Gewinnung von Umfelddaten eine Schlüsselrolle zukommt. Die
Die gattungsbildende
Aufgabe der vorliegenden Erfindung ist es, ein verbessertes System zum Beeinflussen eines adaptiven Fahrwerks eines landgebundenen Fahrzeugs bereitzustellen.The object of the present invention is to provide an improved system for influencing an adaptive chassis of a land-based vehicle.
Diese Aufgabe wird gelöst durch die Merkmale des Patentanspruchs 1.This object is solved by the features of patent claim 1.
Ein System zum Beeinflussen eines adaptiven Fahrwerks eines landgebundenen Fahrzeugs, wobei dem Fahrzeug zumindest zeitweise ein unbemanntes und sich zumindest teil-autonom bewegendes Flugobjekt zugeordnet ist, das mittels zumindest einer Umfeldwahrnehmungseinrichtung eine Beschaffenheit eines Untergrunds repräsentierende Daten in seinem Umfeld erfassen und mit einer fahrzeugseitigen Empfangseinrichtung austauschen kann, wobei das Fahrzeug eine Fahrwerkssteuereinrichtung aufweist, die zumindest einen Betriebsparameter des adaptiven Fahrwerks beeinflussen kann und wobei die Fahrwerkssteuereinrichtung von der Empfangseinrichtung die eine Beschaffenheit eines Untergrunds repräsentierenden Daten erhält und in Abhängigkeit dieser Daten den zumindest einen Betriebsparameter beeinflusst.A system for influencing an adaptive chassis of a land-bound vehicle, wherein the vehicle at least temporarily an unmanned and at least partially-autonomously moving flying object is assigned to capture by means of at least one environment perception device representing a condition of a background data in its environment and exchange with a vehicle-side receiving device can, wherein the vehicle has a chassis control device which can influence at least one operating parameter of the adaptive suspension and wherein the chassis control device receives from the receiving device the data representing a nature of a background data and in dependence of this data affects the at least one operating parameter.
Indem das Flugobjekt eine Beschaffenheit eines Untergrunds repräsentierende Daten in seinem Umfeld sammelt und diese der Fahrwerkssteuereinrichtung des Fahrzeugs übermittelt, ist mit diesen Daten eine wesentlich genauere Einstellung des adaptiven Fahrwerks auf den zu befahrenden Streckenabschnitt möglich. Weil sich das Flugobjekt relativ weit vor das Fahrzeug setzen kann, werden die Daten rechtzeitig bevor sie benötigt werden an das nachfolgende Fahrzeug gesendet. Das Flugobjekt kann dem entsprechenden Fahrzeug proprietär zugeordnet sein, so dass es nur für dieses Fahrzeug Daten sammelt und auch immer wieder zu genau diesem Fahrzeug zurückkehrt oder es kann einer Gruppe von Fahrzeugen gemeinschaftlich dienen. Dazu kann es beispielsweise immer wieder in einem bestimmten Streckenabschnitt verkehren und liefert für diesen permanent die aktuellen Daten über die Beschaffenheit des Untergrunds. Insbesondere bei Rennveranstaltungen kann das Flugobjekt die Beschaffenheit der Fahrbahn, beispielsweise die Benetzung mit Wasser oder die Oberflächentemperatur, an die teilnehmenden Fahrzeuge übermitteln. Das Flugobjekt ist unbemannt und bewegt sich zumindest teil-autonom, vorzugsweise voll-autonom, durch die Luft. Derartige Flugobjekte werden umgangssprachlich auch als Drohnen bezeichnet. Es ist besonders vorteilhaft, wenn sich das Flugobjekt schwebend anstatt gleitend fortbewegt, da sich damit zum Einen das Landen erleichtert und zum Anderen die Unfallgefahr verringert. Das Flugobjekt kann als ein Quadrocopter, also mit vier waagrecht liegenden Propellern, ausgebildet sein. Diese Quadrocopter haben besonders gute Flugeigenschaften beim Schwebeflug. Ein Gyrometer erlaubt die Einhaltung der gewünschten Ausrichtung des Flugobjekts, während ein Gimbal die gewünschte Ausrichtung der zumindest einen Umfeldwahrnehmungseinrichtung unabhängig von der Fluglage des Flugobjekts sicherstellt. Unter dem Begriff „adaptives Fahrwerk” sollen in diesem Zusammenhang alle Fahrwerkssysteme mit Ausnahme passiver Fahrwerke verstanden werden. Hierzu zählen insbesondere aktive Lenkerlager, aktive Aggregatelager, aktive Hilfsrahmenlager, regelbare Schwingungsdämpfer, verstellbare Stabilisatoren, Luftfederung, aktive Federfußpunktverstellung und eine Überlagerungslenkung.By the flying object collecting data representing a condition of an underground in its environment and transmitting it to the chassis control device of the vehicle, it is possible with this data to set the adaptive running gear substantially more precisely to the section of road to be traveled. Because the flying object can sit relatively far in front of the vehicle, the data is sent to the following vehicle in good time before it is needed. The flying object may be proprietary assigned to the corresponding vehicle, so that it collects data only for this vehicle and also returns to exactly that vehicle or it may serve a group of vehicles in common. For this purpose, it can, for example, always run in a certain section of the route and permanently provides the current data on the condition of the subsoil. In particular, during racing events, the flying object, the nature of the road, for example, the wetting with water or the surface temperature, to transmit the participating vehicles. The flying object is unmanned and moves at least partially autonomously, preferably fully autonomously, through the air. Such flying objects are colloquially referred to as drones. It is particularly advantageous if the flying object moves floating rather than sliding, as it makes landing easier and reduces the risk of accidents on the one hand. The flying object can be designed as a quadrocopter, ie with four horizontal propellers. These quadrocopters have particularly good flight characteristics during hovering. A gyrometer allows compliance with the desired orientation of the flying object, while a gimbal ensures the desired orientation of the at least one environment perception device regardless of the attitude of the flying object. In this context, the term "adaptive chassis" should be understood as meaning all suspension systems with the exception of passive chassis. These include in particular active arm bearings, active assembly bearings, active subframe bearings, adjustable vibration dampers, adjustable stabilizers, air suspension, active Federfußpunktverstellung and a superposition steering.
In einer bevorzugten Ausführung umfasst die Umfeldwahrnehmungseinrichtung eine Kamera, einen Laserscanner und/oder ein Radar. Als Kamera eignet sich insbesondere eine Stereokamera, da diese ein dreidimensionales Abbild des Untergrunds aufnehmen kann. Allerdings funktioniert eine Kamera nur bei guten Sichtverhältnissen, was bei Dunkelheit oder Nebel nicht zufriedenstellend gewährleistet ist. Für diesen Fall kann das Flugobjekt zusätzlich einen Laserscanner oder ein Radar nutzen. Die Daten der verschiedenen Umfeldwahrnehmungseinrichtungen können zu einem korrigierten Datensatz fusioniert werden. Dadurch lassen sich die Stärken der einzelnen Umfeldwahrnehmungseinrichtungen kombinieren und die Schwächen reduzieren. Selbstverständlich ist aber auch der Einsatz nur einer Kamera, eines Laserscanners oder eines Radars ausreichend zur Erfüllung der gestellten Aufgabe. Auch ein Infrarotmessgerät kann als Umfeldwahrnehmungseinrichtung verwendet werden, um so die Temperatur des Untergrunds zu erfassen.In a preferred embodiment, the environment perception device comprises a camera, a laser scanner and / or a radar. A camera is particularly suitable as a stereo camera, since it can take a three-dimensional image of the ground. However, a camera works only in good visibility, which is not guaranteed in the dark or fog satisfactory. In this case, the flying object can additionally use a laser scanner or a radar. The data from the various environment perception facilities may be merged into a corrected data set. As a result, the strengths of the individual environment perception facilities can be combined and the weaknesses reduced. Of course, however, the use of only a camera, a laser scanner or a radar is sufficient to fulfill the task. An infrared measuring device can also be used as an environment sensing device, so as to detect the temperature of the ground.
In einer bevorzugten Ausführung korreliert das von dem Flugobjekt zu erfassende Umfeld mit dem von dem Fahrzeug absehbar zu befahrenden Fahrbahnabschnitt. Das Flugobjekt sollte dem Fahrzeug dabei stets eine gewisse Zeit voraus sein, so dass immer ausreichend Daten vorliegen. In einer besonders bevorzugten Ausführung definiert das Flugobjekt das zu erfassende Umfeld in Abhängigkeit von Daten einer Navigationseinrichtung des Fahrzeugs. Die Navigationseinrichtung des Fahrzeugs nutzt in der Regel das GPS-System zur Bestimmung seiner Position auf der Erde. Die Navigationseinrichtung enthält ferner das Straßennetzwerk und kennt nach Eingabe eines Navigationsziels auch die zukünftig zu befahrenden Straßen. Diese Information wird dem Flugobjekt bereitgestellt, so dass dieses bereits im Vorfeld eine Beschaffenheit eines Untergrunds repräsentierende Daten mit seiner Umfeldwahrnehmungseinrichtung aufnehmen und der Fahrwerkssteuereinrichtung bereitstellen kann. Erreicht das Fahrzeug nach einer gewissen Zeit die zuvor erfassten Streckenabschnitte, so kann das adaptive Fahrwerk des Fahrzeugs optimal darauf eingestellt werden. Die vom Flugobjekt gelieferten Daten können wahlweise auch mit hinterlegten Daten aus der Navigationseinrichtung fusioniert werden, um die Datenqualität noch weiter zu erhöhen.In a preferred embodiment, the environment to be detected by the flying object correlates with the road section foreseeable to be traveled by the vehicle. The flying object should always be ahead of the vehicle a certain amount of time so that there is always enough data. In a particularly preferred embodiment, the flying object defines the environment to be detected as a function of data of a navigation device of the vehicle. The vehicle's navigation device typically uses the GPS system to determine its position on the earth. The navigation device also contains the road network and knows after entering a navigation destination and the future to be traveled roads. This information is made available to the flying object, so that this data, which already contains information about the condition of a subsoil, can be recorded by its surroundings perception device and made available to the chassis control device. If the vehicle reaches the previously recorded route sections after a certain time, the adaptive chassis of the vehicle can be optimally adjusted to this. The data supplied by the flying object can optionally also be fused with stored data from the navigation device in order to further increase the data quality.
In einer bevorzugten Ausführung bezieht die Fahrwerkssteuereinrichtung, zusätzlich zu den eine Beschaffenheit eines Untergrunds repräsentierenden Daten, zumindest einen Fahrparameter des Fahrzeugs in die Beeinflussung des zumindest einen Betriebsparameters des adaptiven Fahrwerks ein. In einer besonders bevorzugten Ausführung umfasst der zumindest eine Fahrparameter eine Geschwindigkeit, eine Trajektorie, einen Schwerpunkt und/oder eine Gierrate des Fahrzeugs. Die Fahrparameter des Fahrzeugs werden unter Berücksichtigung der eine Beschaffenheit eines Untergrunds repräsentierenden Daten des Flugobjekts interpretiert, um die Konfiguration des adaptiven Fahrwerks noch besser den momentanen Bedingungen anzupassen. So kann beispielsweise beim Überfahren einer Schlechtwegstrecke mit hoher Geschwindigkeit eine gänzlich andere Abstimmung des adaptiven Fahrwerks notwendig sein, als dies bei niedriger Geschwindigkeit der Fall sein würde.In a preferred embodiment, the chassis control device, in addition to the data representing a condition of a subsoil, involves at least one driving parameter of the vehicle in influencing the at least one operating parameter of the adaptive running gear. In a particularly preferred embodiment, the at least one driving parameter comprises a speed, a trajectory, a center of gravity and / or a yaw rate of the vehicle. The driving parameters of the vehicle are interpreted taking into account the data of the flying object representing a condition of a subsurface, in order to adapt the configuration of the adaptive chassis better to the current conditions. For example, when driving over a poor track at high speed, a completely different tuning of the adaptive suspension may be necessary than would be the case at low speed.
In einer bevorzugten Ausführung dockt das Flugobjekt bei Nichtgebrauch an das Fahrzeug an. Das Fahrzeug führt das Flugobjekt somit bei Nichtgebrauch mit sich. Von dort kann es zum Gebrauch starten und zum Nichtgebrauch wieder anlanden. Insbesondere die Dachfläche des Fahrzeugs eignet sich hierzu, wobei ein spezielles Dock, beispielsweise an der Dachreling montiert, der sicheren Aufnahme des Flugobjekts dienen kann. So kann das Flugobjekt die meiste Zeit mit dem Fahrzeug mitgeführt werden und nur bei Bedarf für eine gewisse Zeit dem Fahrzeug voraus fliegen.In a preferred embodiment, the flying object docks when not in use to the vehicle. The vehicle thus carries the flying object when not in use. From there it can start to use and land again for non-use. In particular, the roof surface of the vehicle is suitable for this purpose, with a special dock, for example, mounted on the roof rail, the safe recording of the flying object can serve. Thus, the flying object can be carried along with the vehicle most of the time and fly only when needed for a certain time ahead of the vehicle.
In einer bevorzugten Ausführung wird ein Energiespeicher des Flugobjekts während des Nichtgebrauchs mit Energie von dem Fahrzeug beaufschlagt. Das Flugobjekt bezieht die Energie zum Betrieb seiner Antriebseinheit(en), also insbesondere seiner Propeller, während des Flugs aus einem mitgeführten Energiespeicher. Der Energiespeicher ist vorzugsweise als elektrochemischer Akkumulator (Lithium-Ionen, Lithium-Polymer, Nickelmetallhydrid, etc...) ausgebildet, kann wahlweise aber auch ein Behälter für einen flüssigen Kraftstoff (Flugbenzin, Ethanol, Methanol, etc.) sein. Während das Flugobjekt an dem Fahrzeug angedockt ist, wird der Energiespeicher wieder aufgeladen. Entweder indem das Flugobjekt beim Andocken an das Fahrzeug selbsttätig eine Steckverbindung mit dem Fahrzeug ausbildet oder indem die elektrische Energie drahtlos mittels eines Spulenpaars übertragen wird. Das Fahrzeug bezieht diese Energie wiederum aus einem fahrzeugseitigen Energiespeicher, beispielsweise einer Traktions- oder Starterbatterie, und/oder aus einer Lichtmaschine.In a preferred embodiment, an energy storage of the flying object is applied during the disuse with energy from the vehicle. The flying object obtains the energy for the operation of its drive unit (s), ie in particular of its propellers, during the flight from an entrained energy store. The energy store is preferably designed as an electrochemical accumulator (lithium ion, lithium polymer, nickel metal hydride, etc...), But can optionally also be a container for a liquid fuel (jet fuel, ethanol, methanol, etc.). While the flying object is docked to the vehicle, the energy storage is recharged. Either by the flying object when docking to the vehicle automatically forms a plug connection with the vehicle or by the electrical energy is transmitted wirelessly by means of a coil pair. The vehicle in turn draws this energy from a vehicle-side energy storage, such as a traction or starter battery, and / or from an alternator.
Weitere Einzelheiten und Vorteile der Erfindung ergeben sich aus der nachstehenden Beschreibung eines bevorzugten Ausführungsbeispiels unter Bezugnahme auf die Zeichnung. Further details and advantages of the invention will become apparent from the following description of a preferred embodiment with reference to the drawings.
Darin zeigt die einzige Figur ein erfindungsgemäßes System zum Beeinflussen eines adaptiven Fahrwerks eines landgebundenen Fahrzeugs.Therein, the single figure shows a system according to the invention for influencing an adaptive chassis of a land-bound vehicle.
Gemäß der Figur umfasst ein System zum Beeinflussen eines adaptiven Fahrwerks
BezugszeichenlisteLIST OF REFERENCE NUMBERS
- 11
- Fahrzeugvehicle
- 22
- Flugobjektflying object
- 33
- Fahrwerklanding gear
- 44
- UmfeldwahrnehmungseinrichtungEnvironment sensing device
- 55
- Untergrundunderground
- 66
- FahrwerkssteuereinrichtungSuspension control device
- 77
- Empfangseinrichtungreceiver
- 88th
- Propellerpropeller
ZITATE ENTHALTEN IN DER BESCHREIBUNG QUOTES INCLUDE IN THE DESCRIPTION
Diese Liste der vom Anmelder aufgeführten Dokumente wurde automatisiert erzeugt und ist ausschließlich zur besseren Information des Lesers aufgenommen. Die Liste ist nicht Bestandteil der deutschen Patent- bzw. Gebrauchsmusteranmeldung. Das DPMA übernimmt keinerlei Haftung für etwaige Fehler oder Auslassungen.This list of the documents listed by the applicant has been generated automatically and is included solely for the better information of the reader. The list is not part of the German patent or utility model application. The DPMA assumes no liability for any errors or omissions.
Zitierte PatentliteraturCited patent literature
- US 2012/0203429 A1 [0002] US 2012/0203429 A1 [0002]
- EP 2697604 B1 [0003] EP 2697604 B1 [0003]
Claims (8)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102015012369.6A DE102015012369A1 (en) | 2015-09-19 | 2015-09-19 | System for influencing an adaptive chassis of a land vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102015012369.6A DE102015012369A1 (en) | 2015-09-19 | 2015-09-19 | System for influencing an adaptive chassis of a land vehicle |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| DE102015012369A1 true DE102015012369A1 (en) | 2016-10-13 |
Family
ID=56986069
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| DE102015012369.6A Ceased DE102015012369A1 (en) | 2015-09-19 | 2015-09-19 | System for influencing an adaptive chassis of a land vehicle |
Country Status (1)
| Country | Link |
|---|---|
| DE (1) | DE102015012369A1 (en) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102016002412A1 (en) | 2016-02-26 | 2017-08-31 | Audi Ag | Method for operating a chassis of a motor vehicle |
| DE102017000280A1 (en) | 2017-01-13 | 2018-07-19 | Man Truck & Bus Ag | Motor vehicle with a take-off and landing device for an unmanned aerial vehicle |
| DE102017209220A1 (en) * | 2017-05-31 | 2018-12-06 | Ford Global Technologies, Llc | Arrangement of a motor vehicle and a drone |
| WO2019034365A1 (en) * | 2017-08-15 | 2019-02-21 | Zf Friedrichshafen Ag | CONTROL OF A TRANSPORT VEHICLE |
| DE102018203484A1 (en) * | 2018-03-08 | 2019-09-12 | Zf Friedrichshafen Ag | Method and device for determining road friction values |
| CN114640772A (en) * | 2022-03-22 | 2022-06-17 | 北京地平线信息技术有限公司 | Suspension camera device and vehicle |
| DE102023004121B4 (en) | 2023-10-12 | 2024-06-20 | Mercedes-Benz Group AG | Method for extended environmental visibility for a motor vehicle and system with a motor vehicle and a mobile unmanned aerial vehicle |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE202009011377U1 (en) * | 2009-04-02 | 2010-08-19 | Drehtainer Gmbh Spezial Container- Und Fahrzeugbau | Device for monitoring the environment and for controlling a vehicle |
| DE102011106170A1 (en) * | 2011-07-01 | 2012-02-02 | Daimler Ag | Method for assisting driver while controlling vehicle, involves detecting surrounding of vehicle by image detection device that is arranged in air craft movable independent from vehicle |
| US20120203429A1 (en) | 2011-02-04 | 2012-08-09 | Dr. Ing. H.C.F. Porsche Aktiengesellschaft | Method for setting the damping force for at least one vibration damper |
| EP2697604B1 (en) | 2011-04-14 | 2015-03-04 | Hexagon Technology Center GmbH | Measuring system for determining 3d coordinates of an object surface |
-
2015
- 2015-09-19 DE DE102015012369.6A patent/DE102015012369A1/en not_active Ceased
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE202009011377U1 (en) * | 2009-04-02 | 2010-08-19 | Drehtainer Gmbh Spezial Container- Und Fahrzeugbau | Device for monitoring the environment and for controlling a vehicle |
| US20120203429A1 (en) | 2011-02-04 | 2012-08-09 | Dr. Ing. H.C.F. Porsche Aktiengesellschaft | Method for setting the damping force for at least one vibration damper |
| EP2697604B1 (en) | 2011-04-14 | 2015-03-04 | Hexagon Technology Center GmbH | Measuring system for determining 3d coordinates of an object surface |
| DE102011106170A1 (en) * | 2011-07-01 | 2012-02-02 | Daimler Ag | Method for assisting driver while controlling vehicle, involves detecting surrounding of vehicle by image detection device that is arranged in air craft movable independent from vehicle |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102016002412A1 (en) | 2016-02-26 | 2017-08-31 | Audi Ag | Method for operating a chassis of a motor vehicle |
| DE102016002412B4 (en) | 2016-02-26 | 2018-12-27 | Audi Ag | Method for operating a chassis of a motor vehicle |
| DE102017000280A1 (en) | 2017-01-13 | 2018-07-19 | Man Truck & Bus Ag | Motor vehicle with a take-off and landing device for an unmanned aerial vehicle |
| DE102017209220A1 (en) * | 2017-05-31 | 2018-12-06 | Ford Global Technologies, Llc | Arrangement of a motor vehicle and a drone |
| DE102017209220B4 (en) * | 2017-05-31 | 2020-04-02 | Ford Global Technologies, Llc | Arrangement from a motor vehicle and a drone |
| US10793268B2 (en) | 2017-05-31 | 2020-10-06 | Ford Global Technologies, Llc | HVAC arrangement including a motor vehicle and a drone |
| WO2019034365A1 (en) * | 2017-08-15 | 2019-02-21 | Zf Friedrichshafen Ag | CONTROL OF A TRANSPORT VEHICLE |
| CN111033416A (en) * | 2017-08-15 | 2020-04-17 | Zf 腓德烈斯哈芬股份公司 | Control of transport vehicles |
| US11507112B2 (en) | 2017-08-15 | 2022-11-22 | Zf Friedrichshafen Ag | Control of a transportation vehicle |
| DE102018203484A1 (en) * | 2018-03-08 | 2019-09-12 | Zf Friedrichshafen Ag | Method and device for determining road friction values |
| CN114640772A (en) * | 2022-03-22 | 2022-06-17 | 北京地平线信息技术有限公司 | Suspension camera device and vehicle |
| DE102023004121B4 (en) | 2023-10-12 | 2024-06-20 | Mercedes-Benz Group AG | Method for extended environmental visibility for a motor vehicle and system with a motor vehicle and a mobile unmanned aerial vehicle |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE102015012369A1 (en) | System for influencing an adaptive chassis of a land vehicle | |
| DE102013200132B4 (en) | Lane keeping system for a vehicle | |
| DE102013209575B4 (en) | METHOD OF CONTROLLING A VEHICLE | |
| DE102018107740A1 (en) | Adjustment adjustments of off-road vehicles | |
| DE102017114471A1 (en) | Vehicle control device | |
| DE102018205203A1 (en) | Data recorder arrangement for a vehicle | |
| DE102019117657A1 (en) | Driving control system for a vehicle | |
| DE102012201811A1 (en) | METHOD AND SYSTEM FOR CONTROLLING THE RELATIVE POSITION BETWEEN VEHICLES USING A MOBILE BASE STATION | |
| DE102015110812A1 (en) | Motor vehicle drone deployment system | |
| DE102017106684A1 (en) | AUTONOMOUS VEHICLE PAGE CONTROL FOR TRACKING AND STABILITY | |
| DE102014118414A1 (en) | Speed limit threshold detection device and navigation data updating device and method using same | |
| DE102019133703A1 (en) | METHODS AND SYSTEMS FOR PRODUCING AND LOCALIZING A VEHICLE | |
| DE102015118489A1 (en) | Remote control of an autonomous vehicle in an unexpected environment | |
| DE112011101251T5 (en) | Vehicle control device, target lead vehicle assignment device, and vehicle control method | |
| DE112019001078T5 (en) | METHOD AND DEVICE FOR VEHICLE CONTROL | |
| DE102010013339A1 (en) | Device for controlling active/semi-active engine mounting for passenger car, has evaluation unit determining unevenness in course of road surface, where adjustment of operating parameter of engine mounting is taken place based on unevenness | |
| EP3966797A1 (en) | Method for ascertaining a vehicle trajectory | |
| DE102016221365B4 (en) | Method and device for automatically maneuvering a wheelchair relative to a vehicle | |
| DE102011080932A1 (en) | Method for assisting driver of vehicle during execution of driving maneuver, involves providing environmental data and evaluating environmental data, where ground level objects are identified | |
| DE102015118471A1 (en) | Method for the at least semi-autonomous maneuvering of a motor vehicle with an active chassis system, driver assistance system and motor vehicle | |
| DE102018124904A1 (en) | Methods and systems for setting active underbody surfaces | |
| DE102014016121A1 (en) | Method for determining a height profile of a roadway and method for determining a vehicle position | |
| DE102020205468A1 (en) | Autonomous and / or assisted coupling of a trailer taking into account the height profile of the ground | |
| DE102017108130A1 (en) | Method for data fusion of a data set, corresponding arithmetic unit and vehicle which is equipped with a corresponding arithmetic unit and computer program | |
| EP4386501A1 (en) | Arrangement and method for determining parameters of a roadway in front of a vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| R012 | Request for examination validly filed | ||
| R016 | Response to examination communication | ||
| R230 | Request for early publication | ||
| R002 | Refusal decision in examination/registration proceedings | ||
| R003 | Refusal decision now final |