Background
Interventional therapy is a minimally invasive therapy carried out by modern high-tech means, namely, under the guidance of medical imaging equipment, special catheters, guide wires and other precise instruments are introduced into a human body to diagnose and locally treat internal diseases.
The digital technology is applied to interventional therapy, the visual field of a doctor is expanded, the hands of the doctor are prolonged by means of the catheter and the guide wire, and the incision (puncture point) of the doctor is only rice grain in size, so that a plurality of diseases which cannot be treated in the past and have poor curative effect such as tumors, hemangiomas, various kinds of bleeding and the like can be treated without cutting human tissues. The interventional therapy has the characteristics of no operation, small wound, quick recovery and good effect. Is the development trend of future medicine.
For the blood vessel interventional operation, doctors need to receive X-ray radiation for a long time, and therefore, a master-slave blood vessel interventional operation robot for remote operation is developed in engineering. The master-slave vascular interventional surgical robot can work in an intense radiation environment, and a doctor controls a slave end at a master end outside a ray environment.
In the process of executing the advance and retreat and rotation of the guide wire (or the guide pipe), the slave-end surgical robot needs to be driven by a corresponding transmission mechanism.
SUMMERY OF THE UTILITY MODEL
In view of the above, it is necessary to provide a novel interventional surgical robot driving device with a stroke detection function in order to overcome the disadvantages of the prior art.
The utility model provides an intervene surgical robot drive arrangement with stroke detects function, its installs in intervene surgical robot from serving for realize centre gripping, the drive of seal wire pipe, and it includes the inner tower and installs the rubbing mechanism in the inner tower, rubbing mechanism is close to each other and the first drive assembly of centre gripping seal wire pipe and the second drive assembly of rubbing seal wire pipe pivoted that two centre gripping groups of drive are followed the mutual reverse motion of second direction different from the first direction including two centre gripping groups, two centre gripping groups that set up relatively, drive, the mutual reverse motion of two centre gripping groups along the first direction of second drive assembly drive, intervene surgical robot drive arrangement still including the stroke detection device who is used for detecting the stroke of second drive assembly.
Furthermore, the second driving assembly comprises two sliding seats, a second linkage wheel and a driving motor, wherein the second linkage wheel is arranged between the two sliding seats and enables the two sliding seats to synchronously move along a second direction in a mutually opposite direction, and the driving motor is connected to the second linkage wheel.
Furthermore, the stroke detection device comprises a photoelectric sensor arranged on one of the inner frame and the sliding seat and a barrier strip arranged on the other of the inner frame and the sliding seat.
Furthermore, the number of the photoelectric sensors is two, and two barrier strips are arranged corresponding to the two photoelectric sensors.
Furthermore, the inner side surfaces of the two sliding seats are provided with clamping teeth, the outer circumferential surface of the second coupling wheel is provided with the clamping teeth, and the two sliding seats are simultaneously meshed with the second coupling wheel.
Further, the first driving assembly comprises two first bottom frames movably mounted on the inner frame and respectively connected to the two clamping groups, and a driver for driving the two first bottom frames to approach or depart from each other.
Further, the first direction and the second direction are perpendicular to each other.
In summary, the interventional surgical robot driving device with the stroke detection function of the utility model is provided with the stroke detection device, the stroke detection device detects the maximum stroke of the second driving component when the second driving component drives the guide wire guide pipe to rotate, and the interventional surgical robot driving device resets according to the detection result of the stroke detection device, so that the interventional surgical robot driving device is effectively prevented from being damaged when the stroke of the second driving component exceeds the limit position, and the position of the clamping group is ensured to be consistent after each resetting.
Detailed Description
In order to make the objects, technical solutions and advantages of the present invention more clearly understood, the present invention will be further described in detail with reference to the accompanying drawings and embodiments. It should be understood that the specific embodiments described herein are merely illustrative of the utility model and are not intended to limit the utility model.
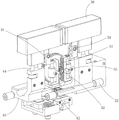
As shown in fig. 1 to 5, the present invention provides a driving device for an interventional surgical robot with a stroke detection function, which is installed on a slave end of the interventional surgical robot, and is configured to push a slender medical device (guide wire or catheter) 100 to perform operations of clamping, forward rotation and reverse rotation, push the slender medical device 100, i.e., the forward rotation of the guide wire or catheter refers to a direction in which the guide wire or catheter is rotated into a body of a surgical patient, and reverse rotation refers to a direction in which the guide wire or catheter is rotated out of the body of the surgical patient.
The interventional operation robot driving device with the stroke detection function comprises a rack 10, an inner frame 20 and a twisting mechanism, wherein the twisting mechanism is arranged on the inner frame 20, and the rack 10 is sleeved on the outer sides of the inner frame 20 and the twisting mechanism to isolate the outside from the twisting mechanism. The twisting mechanism comprises two clamping groups 30, a first driving assembly 40 and a second driving assembly 50 which are oppositely arranged, the first driving assembly 40 drives the two clamping groups 30 to approach or depart from each other along a first direction, when the first driving assembly 40 drives the two clamping groups 30 to approach along the first direction, the two clamping groups 30 clamp the guide wire catheter, the second driving assembly 50 drives the two clamping groups 30 to move in opposite directions along a second direction different from the first direction, the twisting guide wire catheter rotates, and the first direction is perpendicular to the second direction.
The first driving assembly 40 includes two first bottom frames 43 installed on the inner frame 20, first linkage wheels 42 simultaneously connected to the two first bottom frames 43, two sets of first guide rods 44 respectively installed on the two first bottom frames 43, and a driver 41 for driving the two first bottom frames 43 to move along a first direction. The two first bottom frames 43 are oppositely arranged. The first linkage wheel 42 is disposed between the two first bottom frames 43 and allows the two first bottom frames 43 to synchronously move toward or away from each other along a first direction. The inner sides of the two first underframe 43 are both provided with latch teeth, the outer surface of the first linkage wheel 42 is provided with latch teeth, and the first linkage wheel 42 is meshed with the first underframe 43 of the two clamping groups 30 through the latch teeth. The driver 41 is connected with one of the first base frames 43, and under the action of the first linkage wheel 42, the driver 41 drives the two first base frames 43 to move in opposite directions along the first direction. The two clamping groups 30 are respectively mounted on the two groups of first guide rods 44, and drive the two clamping groups 30 to approach or separate from each other along a first direction, so as to drive the two clamping groups 30 to perform clamping or releasing actions, and the driver 41 may be an electromagnetic driver or a first driving motor.
The two first chassis 43 of the first driving assembly 40 are respectively installed in cooperation with the two clamping groups 30 through two sets of first guide rods 44. The entire clamping group 30 can slide back and forth along the first guide rod 44 in a second direction to twist the guide wire or catheter.
The inner frame 20 is further provided with two sets of bearings 22 corresponding to the two first bottom frames 43, the bearings 22 extend along a first direction, the two first bottom frames 43 of the first driving assembly 40 are respectively mounted on the two bearings 22, and the first bottom frames 43 slide on the bearings 22 along the first direction.
The interventional surgical robot driving device with the stroke detection function further includes a first stroke detection device 60. In this embodiment, the first stroke detecting device 60 is a grating sensor, the grating sensor includes a grating ruler 62 and a grating reading head 61, the grating ruler 62 is mounted on a first chassis 43 along a first direction, and the grating reading head 61 is disposed above the grating ruler 62 and is fixedly mounted on the inner frame 20. When the two first underframe 43 moves along the first direction until the two clamping groups 30 clamp the guide wire of the catheter, the grating sensor acquires the displacement of the movement and transmits the measurement result to the system controller, and the measurement result is converted into the diameter of the guide wire or the catheter. In order to determine that the two clamping groups 30 completely clamp the guide wire and the guide tube, a pressure sensor 70 is further disposed between the first chassis 43 and the driver 41, the driver 41 drives the two clamping groups 30 to squeeze the pressure sensor 70 when clamping the guide wire and the guide tube, and when a pressure value of the pressure sensor 70 reaches a set value, it indicates that the two clamping groups 30 clamp the guide wire and the guide tube, of course, the pressure sensor 70 is not used, and the driver 41 only needs to output a driving force with a fixed value each time the guide wire or the guide tube is clamped.
The second driving assembly 50 includes two sliding seats 53 respectively connected to the two clamping groups 30, a second linkage wheel 52 disposed between the two sliding seats 53 and allowing the two sliding seats 53 to move away from or close to each other along a second direction synchronously, and a second driving motor 51 connected to the second linkage wheel 52, wherein the second driving motor 51 drives the two clamping groups 30 to move in opposite directions along the second direction so as to twist the guide wire conduit to rotate. The inner side surfaces of the two sliding seats 53 of the second driving assembly 50 are both provided with a latch, the outer circumferential surface of the second linkage wheel 52 is provided with a latch, the two sliding seats 53 of the second driving assembly 50 are simultaneously engaged with the second linkage wheel 52, the second driving motor 51 drives the second linkage wheel 52 to rotate, and under the action of the second linkage wheel 52, the two sliding seats 53 are synchronously driven to move in opposite directions, so that the two clamping groups 30 are driven to rub the guide wire or the guide pipe to rotate in forward or reverse directions.
The bottom of each of the clamping groups 30 is provided with a lock catch groove 31, the slide base 53 connected with the lock catch groove 31 is provided with a clamping strip 54 at a position with a horizontal height equal to the lock catch groove 31, and the clamping strip 54 is clamped in the lock catch groove 31, so that the second driving motor 51 can drive the two corresponding clamping groups 30 to move in the second direction in the opposite direction through the two slide bases 53.
The interventional surgical robot driving device with the stroke detection function further comprises a second stroke detection device 63, wherein the second stroke detection device 63 is used for detecting whether the stroke of the two clamping groups 30 in the second direction reaches the limit position. In this embodiment, the second stroke detecting device 63 is a two-piece photoelectric sensor, and the two photoelectric sensors are mounted on the clamping plate 21. Correspondingly, the two sliding seats 53 are also convexly provided with barrier strips 55, the barrier strips 55 on the two sliding seats 53 respectively correspond to the two photoelectric sensors, as the two clamping groups 30 move in the second direction in opposite directions, as long as one of the clamping groups 30 moves, the corresponding barrier strip 55 on the sliding seat 53 moves to the light outlet position of the corresponding photoelectric sensor, the system controller judges that the clamping group 30 reaches the limit position along the second direction according to the change of the optical information of the photoelectric sensor, the two clamping groups 30 loosen the guide wire catheter, then reset, and start the next driving.
The interventional operation robot driving device with the stroke detection function is provided with the first stroke detection device 60, the first stroke detection device 60 detects that the driver drives the two first underframe 43 to approach each other until the two clamping groups 30 clamp the displacement of the guide wire catheter to obtain the diameter of the guide wire of the catheter, and when the second driving assembly 50 drives the guide wire catheter to rotate, the second driving assembly 50 can accurately control the rotation number of the guide wire catheter according to the obtained diameter information of the guide wire catheter under the condition of determining the diameter information, so that the instruction sent by the master end control conforms to the slave end control, and a doctor operating at the master end can more effectively and more quickly control the guide wire catheter to enter a focus position.
The above-described embodiments only represent one embodiment of the present invention, and the description thereof is more specific and detailed, but not to be construed as limiting the scope of the utility model. It should be noted that, for those skilled in the art, many variations and modifications can be made without departing from the spirit of the utility model, and these are within the scope of the utility model. Therefore, the protection scope of the utility model patent should be subject to the appended claims.