CN202098458U - Electrically-controlled electric four-wheel steering system - Google Patents
Electrically-controlled electric four-wheel steering system Download PDFInfo
- Publication number
- CN202098458U CN202098458U CN 201120209134 CN201120209134U CN202098458U CN 202098458 U CN202098458 U CN 202098458U CN 201120209134 CN201120209134 CN 201120209134 CN 201120209134 U CN201120209134 U CN 201120209134U CN 202098458 U CN202098458 U CN 202098458U
- Authority
- CN
- China
- Prior art keywords
- sensor
- steering
- ecu
- wheel steering
- wheel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000007246 mechanism Effects 0.000 claims abstract description 32
- 230000009467 reduction Effects 0.000 claims description 13
- 230000000694 effects Effects 0.000 claims description 2
- 230000005611 electricity Effects 0.000 claims 4
- 238000000034 method Methods 0.000 description 4
- 239000000446 fuel Substances 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 230000009286 beneficial effect Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 238000005265 energy consumption Methods 0.000 description 2
- 230000001939 inductive effect Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 238000007789 sealing Methods 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000003750 conditioning effect Effects 0.000 description 1
- 238000011217 control strategy Methods 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000008447 perception Effects 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
Images

Landscapes
- Steering-Linkage Mechanisms And Four-Wheel Steering (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Abstract
本实用新型涉及一种两轴汽车的电控电动式四轮转向系统。包括前、后轮转向机构及转角传感器、步进电动机及其减速机构;前轮转角传感器安装于转向盘的转向轴上;后轮转角传感器安装于电机减速机构-齿轮变速箱的输出轴上,车速传感器安装在车速里程表的转子附近,横摆角速度传感器安装在汽车质心处的车身上,前、后轮转向机构均采用齿轮齿条式转向机构。车辆转向时,各传感器均将感知信号传给控制器(ECU),经分析计算后,(ECU)向电动机输出信号,电动机根据(ECU)传来的信号大小确定扭矩的大小和电机旋转方向,通过后轮转向机构驱动后轮产生一定角度的偏转。本实用新型零部件少、重量轻、设计紧凑、经济性好,工作时不受发动机运转工况的影响。
The utility model relates to an electronically controlled electric four-wheel steering system of a two-axle automobile. Including the front and rear wheel steering mechanism and angle sensor, stepping motor and its deceleration mechanism; the front wheel angle sensor is installed on the steering shaft of the steering wheel; the rear wheel angle sensor is installed on the output shaft of the motor deceleration mechanism-gear gearbox, The vehicle speed sensor is installed near the rotor of the speedometer, the yaw rate sensor is installed on the vehicle body at the center of mass of the vehicle, and the front and rear wheel steering mechanisms use rack and pinion steering mechanisms. When the vehicle is turning, each sensor transmits the sensing signal to the controller (ECU). After analysis and calculation, the (ECU) outputs a signal to the motor, and the motor determines the magnitude of the torque and the direction of rotation of the motor according to the signal from the (ECU). The rear wheels are driven to deflect at a certain angle through the rear wheel steering mechanism. The utility model has the advantages of few parts, light weight, compact design and good economy, and is not affected by the operating conditions of the engine during operation.
Description
技术领域 technical field
本实用新型属于汽车零部件制造技术领域,具体涉及一种两轴汽车的电控电子式四轮转向系统。The utility model belongs to the technical field of automobile parts manufacturing, in particular to an electronically controlled electronic four-wheel steering system of a two-axle automobile.
背景技术 Background technique
传统的单前轴转向系统由于响应速度慢、转向不灵活、高速行驶时方向稳定性差而渐渐无法满足人们对车辆主动安全性越来越高的要求,迫切需要一种高效的转向系统来实现良好的车辆转向安全性。在这种形势下,四轮转向系统应运而生,四轮转向(Four-Wheel Steering,简称4WS)系统是指车辆在转向过程中,前后两组4个车轮都能根据需要起转向作用,以更有效地改善车辆的机动灵活性和操纵稳定性。4WS汽车在低速转弯时,前后车轮逆相位转向,可减小车辆的转弯半径;在高速转弯时,前后轮作同相位转向,能减少车辆质心侧偏角,降低车辆横摆率的稳态超调量等,可进一步提高车辆操纵稳定性。Due to the slow response, inflexible steering, and poor directional stability at high speeds, the traditional single front axle steering system gradually fails to meet people's increasingly high requirements for active safety of vehicles. An efficient steering system is urgently needed to achieve good vehicle steering safety. In this situation, the four-wheel steering system came into being. The four-wheel steering (Four-Wheel Steering, 4WS for short) system means that during the steering process of the vehicle, the four wheels of the front and rear groups can play a steering role as required, so as to More effectively improve the maneuverability and handling stability of the vehicle. When turning at a low speed, the front and rear wheels of a 4WS vehicle steer in opposite phases, which can reduce the turning radius of the vehicle; when turning at a high speed, the front and rear wheels steer at the same phase, which can reduce the side slip angle of the vehicle's center of mass and reduce the steady-state overshoot of the yaw rate of the vehicle. amount, etc., can further improve the vehicle handling stability.
目前的4WS系统中,除机械式外,多数采用的是液压式4WS系统,这种系统工作压力大、工作平稳可靠,但由于液压系统在结构、系统布置、密封性、能耗、效率等方面存在的缺点,以及在转向过程中存在响应滞后等缺陷,使得液压式4WS系统很难适应现代四轮转向汽车在转向灵敏性、快速性方面的要求,不利于汽车高速行驶的稳定性。In the current 4WS system, except for the mechanical type, most of the hydraulic 4WS systems are used. This system has a large working pressure and stable and reliable work. However, due to the structure, system layout, sealing, energy consumption, and efficiency of the hydraulic system The existing shortcomings, as well as the response lag in the steering process, make it difficult for the hydraulic 4WS system to meet the requirements of modern four-wheel steering vehicles in terms of steering sensitivity and rapidity, which is not conducive to the stability of the car at high speed.
实用新型内容 Utility model content
为了克服液压式四轮转向系统在结构、系统布置、密封性、能耗、效率等方面的缺陷,本实用新型提供一种零部件少、重量轻、设计紧凑,所占的空间小、燃油经济性好的电控电动式四轮转向系统。In order to overcome the shortcomings of the hydraulic four-wheel steering system in terms of structure, system layout, sealing, energy consumption, and efficiency, the utility model provides a hydraulic four-wheel steering system with few parts, light weight, compact design, small space occupation, and fuel economy. Good electronically controlled electric four-wheel steering system.
实现上述目的的技术解决方案如下:电控电动式四轮转向系统,包括前、后轮转向机构、前、后轮转角传感器、车速传感器、横摆角速度传感器及驱动电机减速机构,所述驱动电机减速机构采用变速齿轮箱。The technical solution to achieve the above object is as follows: electronically controlled electric four-wheel steering system, including front and rear wheel steering mechanisms, front and rear wheel angle sensors, vehicle speed sensors, yaw rate sensors and drive motor speed reduction mechanism, the drive motor The reduction mechanism adopts a speed change gearbox.
所述前、后轮转向机构均为齿轮齿条式转向机构。The front and rear wheel steering mechanisms are rack and pinion steering mechanisms.
所述前轮转角传感器采用电感式角位移传感器,安装于转向盘的转向轴上。The front wheel angle sensor is an inductive angular displacement sensor installed on the steering shaft of the steering wheel.
所述后轮转角传感器亦采用电感式角位移传感器,安装于电机减速机构-变速齿轮箱的输出轴上。The rear wheel angle sensor also adopts an inductive angular displacement sensor, which is installed on the output shaft of the motor reduction mechanism-speed change gear box.
所述车速传感器安装在车速里程表的转子附近,采用光电式车速传感器。The vehicle speed sensor is installed near the rotor of the vehicle speed odometer, and adopts a photoelectric vehicle speed sensor.
所述横摆角速度传感器安装在汽车质心处的车身上,采用压电射流角速度传感器。The yaw rate sensor is installed on the vehicle body at the center of mass of the automobile, and adopts a piezoelectric jet rate sensor.
所述的前轮转角传感器、后轮转角传感器、车速传感器及横摆角速度传感器的感知信号均通过导线传给控制器(ECU)。The sensing signals of the front wheel angle sensor, the rear wheel angle sensor, the vehicle speed sensor and the yaw rate sensor are all transmitted to the controller (ECU) through wires.
所述的控制器(ECU)的CPU是一个具有256字节RAM的16位单片机,采用Intel公司MCS-96系列的80C196KB单片机,外扩27128EPROM程序存储器。The CPU of described controller (ECU) is a 16 single-chip microcomputers with 256 bytes of RAM, adopts the 80C196KB single-chip microcomputer of Intel Corporation MCS-96 series, expands 27128EPROM program memory outside.
所述的电机减速机构连接步进电动机和后轮转向机构。The motor reduction mechanism is connected with the stepping motor and the rear wheel steering mechanism.
所述步进电动机通过导线接收控制器(ECU)的输出信号,并根据控制信号的指示,作相应方向和角度的旋转运动,带动后轮转向机构运动,使后轮向左或向右偏转。The stepping motor receives the output signal of the controller (ECU) through the wire, and according to the instruction of the control signal, performs the rotation movement of the corresponding direction and angle, drives the movement of the rear wheel steering mechanism, and makes the rear wheel deflect to the left or right.
与传统液压式四轮转向系统相比,本实用新型的有益技术效果体现在以下方面:Compared with the traditional hydraulic four-wheel steering system, the beneficial technical effects of the utility model are reflected in the following aspects:
(1)不受发动机运转工况的影响。在使用4WS的场合,转向系统不受发动机停、转的影响,即使在停车时,驾驶员也可以获得最大的转向动力。(1) Not affected by engine operating conditions. In the case of using 4WS, the steering system is not affected by the stop and turn of the engine, and the driver can obtain the maximum steering power even when the vehicle is stopped.
(2)有利于整车的总布置设计。由于本实用新型较多地使用了电气设备,减少了不少的机械连接,零部件少、重量轻,设计紧凑,所占的空间相对较小,可以更有利于整车的总布置设计。(2) It is beneficial to the overall layout design of the vehicle. Since the utility model uses more electrical equipment, a lot of mechanical connections are reduced, the parts are few, the weight is light, the design is compact, and the occupied space is relatively small, which can be more conducive to the general layout design of the whole vehicle.
(3)燃油经济性好。由于本实用新型的动力转向装置不是由发动机通过传动系直接驱动,转向电动机只有在发生转向动作时才接通,因此可以节省燃油。同时,由于它不存在油液损失,使得系统工作更可靠,运行更快捷。(3) Good fuel economy. Because the power steering device of the utility model is not directly driven by the engine through the transmission system, the steering motor is only connected when the steering action occurs, so fuel can be saved. At the same time, because there is no loss of oil, the system works more reliably and runs faster.
附图说明 Description of drawings
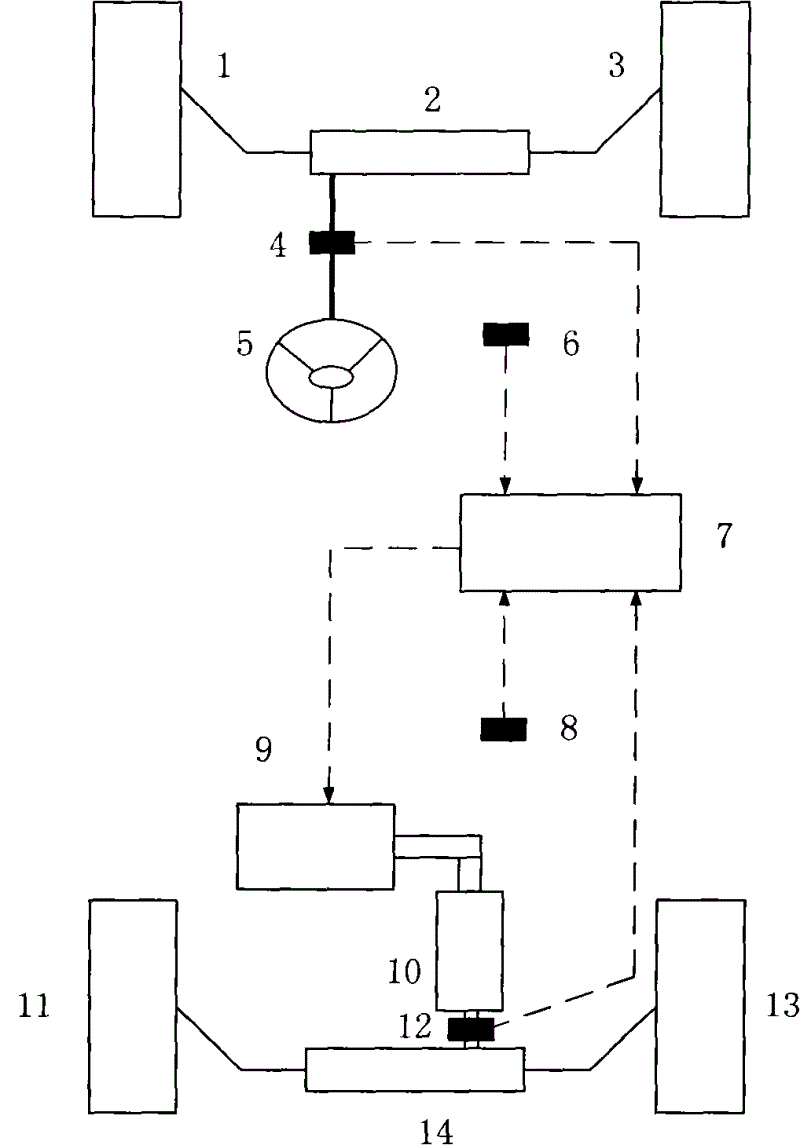
图1为本实用新型总体布置图。Fig. 1 is the overall layout of the utility model.
图2为本实用新型控制系统电路原理图。Fig. 2 is the schematic circuit diagram of the control system of the utility model.
上述图中的标记均为:1、3前轮 2前轮转向机构 4前轮转角传感器 5转向盘 6车速传感器 7控制器(ECU) 8横摆角速度传感器 9步进电动机 10减速机构 11、13后轮 12后轮转角传感器 14后轮转向机构15转向模式选择开关 16外部电源 17转向模式指示灯 18故障显示屏The marks in the above figure are: 1, 3 front wheel 2 front wheel steering mechanism 4 front wheel angle sensor 5
具体实施方式 Detailed ways
下面结合附图,对本实用新型作进一步地描述。Below in conjunction with accompanying drawing, the utility model is described further.
如图1所示,电控电动式四轮转向系统,包括前轮转向机构2、前轮转角传感器4、后轮转角传感器12、减速机构10;所述前轮转向机构2采用齿轮齿条式转向机构;所述减速机构10为齿轮变速箱,前轮转角传感器4安装于转向盘5的转向轴上;后轮转角传感器12安装于减速机构10的输出轴上,车速传感器6安装在车速里程表的转子附近,采用光电式车速传感器,横摆角速度传感器8安装在汽车质心处的车身上,采用压电射流角速度传感器。As shown in Figure 1, the electronically controlled electric four-wheel steering system includes a front wheel steering mechanism 2, a front wheel angle sensor 4, a rear
所述的前轮转角传感器4、后轮转角传感器12、车速传感器6及横摆角速度传感器8的感知信号均传给控制器(ECU)7,所述的控制器(ECU)7是一个具有256字节RAM的16位单片机,采用Intel公司MCS-96系列的80C196KB单片机,外扩27128EPROM程序存储器。The perception signals of described front wheel angle sensor 4, rear
所述后轮转向机构(14)采用齿轮齿条式转向机构;所述减速机构10连接步进电动机9和后轮转向机构14,起降速增矩作用。The rear wheel steering mechanism (14) adopts a rack and pinion steering mechanism; the speed reduction mechanism 10 is connected with the stepper motor 9 and the rear wheel steering mechanism 14, and plays the role of speed reduction and torque increase.
所述步进电动机9接收控制器(ECU)7的输出信号,并根据控制信号的指示,作相应方向和角度的旋转运动。The stepping motor 9 receives the output signal of the controller (ECU) 7, and performs rotational movement in the corresponding direction and angle according to the instruction of the control signal.
见图2所示,所述控制器(ECU)7是整个系统的核心,由80C196KB单片机7-3、EPROM7-2、信号调理电路7-1、内部电源电路7-4、电动机驱动电路7-5、显示输出电路7-6等部分组成。所述的控制器(ECU)7内置系统故障自诊断程序,诊断结果通过故障显示屏18通知驾驶员。系统设置两种转向模式,并设转向模式开关15及转向模式开关指示灯17,驾驶员可以选择传统的2WS转向模式,也可以选择4WS转向模式,系统可以根据故障信号自动对转向模式开关进行选择,即当四轮转向系统出现故障时,自动将转向系统由4WS模式转换为2WS模式,同时4WS系统故障指示灯18点亮。See shown in Figure 2, described controller (ECU) 7 is the core of whole system, by 80C196KB single-chip microcomputer 7-3, EPROM7-2, signal conditioning circuit 7-1, internal power supply circuit 7-4, motor drive circuit 7- 5. It is composed of display output circuit 7-6 and other parts. The controller (ECU) 7 has a built-in system fault self-diagnosis program, and the diagnosis result is notified to the driver through the
在车辆转向时,前轮转向传感器4将前轮转向的信号传入(ECU)7、车速传感器6将车辆的速度信号传入(ECU)7,(ECU)7进行分析运算之后,向电动机9输出信号,电动机9根据(ECU)传来的信号大小确定扭矩的大小和电机旋转方向,通过后轮转向机构14驱动后轮产生一定角度的偏转。(ECU)同时还通过横摆角速度传感器8、后轮转角传感器12对车辆的状态进行实时监测,将后轮转角的理想值与实际转角之间的差值,反馈给步进电机9,以实时调整后轮转角,从而实现汽车的四轮转向。整个系统由外部电源16供电,所述外部电源16为车载蓄电池。When the vehicle is turning, the front wheel steering sensor 4 transmits the signal of the front wheel steering to (ECU) 7, and the
由于在实际行驶中汽车转弯时车速变化较快(通常转弯都伴随有减速过程),所以采用的控制策略是:车速低于40km/h时前后轮反向转动,40km/h~60km/h时后轮转向机构几乎不动,而高于60km/h时前后轮同向转动。动作的大小和方向则根据设定的转向理想值,完全由(ECU)7控制。Since the speed of the car changes rapidly when turning in actual driving (usually the turning is accompanied by a deceleration process), the control strategy adopted is: when the speed is lower than 40km/h, the front and rear wheels rotate in reverse, when the speed is 40km/h~60km/h The rear wheel steering mechanism hardly moves, and the front and rear wheels rotate in the same direction when the speed is higher than 60km/h. The size and direction of the movement are completely controlled by (ECU) 7 according to the set steering ideal value.
Claims (4)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 201120209134 CN202098458U (en) | 2011-06-11 | 2011-06-11 | Electrically-controlled electric four-wheel steering system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 201120209134 CN202098458U (en) | 2011-06-11 | 2011-06-11 | Electrically-controlled electric four-wheel steering system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN202098458U true CN202098458U (en) | 2012-01-04 |
Family
ID=45384486
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN 201120209134 Expired - Fee Related CN202098458U (en) | 2011-06-11 | 2011-06-11 | Electrically-controlled electric four-wheel steering system |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN202098458U (en) |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103569197A (en) * | 2013-11-12 | 2014-02-12 | 安徽工程大学 | Four-wheel steering system and control method thereof |
| CN104149845A (en) * | 2014-08-29 | 2014-11-19 | 浙江吉利控股集团有限公司 | Protection device and method for automobile steering drive failure |
| CN105189171A (en) * | 2013-04-30 | 2015-12-23 | 标致·雪铁龙汽车公司 | Strategy, for a hybrid vehicle, concerning the coupling of an electric machine with the rear wheels during cornering |
| CN105292251A (en) * | 2015-11-11 | 2016-02-03 | 吉林大学 | Four-wheel steering system for automobile |
| CN105905114A (en) * | 2015-12-31 | 2016-08-31 | 江苏耐维思通科技股份有限公司 | Unattended truck system |
| CN105946970A (en) * | 2016-03-27 | 2016-09-21 | 林洪立 | Intelligent steering angle driving unit of electric car |
| CN107972733A (en) * | 2017-12-22 | 2018-05-01 | 长春天火汽车制造有限公司 | A kind of allterrain vehicle back-wheel Follow-up steering mechanism |
| CN108801647A (en) * | 2018-05-29 | 2018-11-13 | 西华大学 | A kind of multiaxis commercial car has the course changing control frame device of measurement yaw velocity |
| CN110155169A (en) * | 2019-07-16 | 2019-08-23 | 华人运通(上海)新能源驱动技术有限公司 | Control method for vehicle, device and vehicle |
| CN112644584A (en) * | 2020-12-30 | 2021-04-13 | 华人运通(江苏)技术有限公司 | Vehicle rear wheel steering control system and method |
| CN115783043A (en) * | 2022-11-24 | 2023-03-14 | 东风汽车集团股份有限公司 | Method, system, device and medium for vehicle oblique translation |
| CN119348696A (en) * | 2024-11-26 | 2025-01-24 | 山东海德智能装备有限公司 | An omnidirectional rotating wheel and a vehicle equipped with the rotating wheel |
-
2011
- 2011-06-11 CN CN 201120209134 patent/CN202098458U/en not_active Expired - Fee Related
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105189171A (en) * | 2013-04-30 | 2015-12-23 | 标致·雪铁龙汽车公司 | Strategy, for a hybrid vehicle, concerning the coupling of an electric machine with the rear wheels during cornering |
| CN105189171B (en) * | 2013-04-30 | 2017-12-12 | 标致·雪铁龙汽车公司 | The method that the motor of motor vehicle driven by mixed power is connected with rear wheel during turning |
| CN103569197A (en) * | 2013-11-12 | 2014-02-12 | 安徽工程大学 | Four-wheel steering system and control method thereof |
| CN104149845B (en) * | 2014-08-29 | 2017-01-18 | 浙江吉利汽车研究院有限公司 | Protection device and method for automobile steering drive failure |
| CN104149845A (en) * | 2014-08-29 | 2014-11-19 | 浙江吉利控股集团有限公司 | Protection device and method for automobile steering drive failure |
| CN105292251A (en) * | 2015-11-11 | 2016-02-03 | 吉林大学 | Four-wheel steering system for automobile |
| CN105905114A (en) * | 2015-12-31 | 2016-08-31 | 江苏耐维思通科技股份有限公司 | Unattended truck system |
| CN105946970A (en) * | 2016-03-27 | 2016-09-21 | 林洪立 | Intelligent steering angle driving unit of electric car |
| CN107972733A (en) * | 2017-12-22 | 2018-05-01 | 长春天火汽车制造有限公司 | A kind of allterrain vehicle back-wheel Follow-up steering mechanism |
| CN108801647A (en) * | 2018-05-29 | 2018-11-13 | 西华大学 | A kind of multiaxis commercial car has the course changing control frame device of measurement yaw velocity |
| CN110155169A (en) * | 2019-07-16 | 2019-08-23 | 华人运通(上海)新能源驱动技术有限公司 | Control method for vehicle, device and vehicle |
| CN112644584A (en) * | 2020-12-30 | 2021-04-13 | 华人运通(江苏)技术有限公司 | Vehicle rear wheel steering control system and method |
| CN115783043A (en) * | 2022-11-24 | 2023-03-14 | 东风汽车集团股份有限公司 | Method, system, device and medium for vehicle oblique translation |
| CN119348696A (en) * | 2024-11-26 | 2025-01-24 | 山东海德智能装备有限公司 | An omnidirectional rotating wheel and a vehicle equipped with the rotating wheel |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN202098458U (en) | Electrically-controlled electric four-wheel steering system | |
| CN107953928A (en) | A kind of double generator redundancy steer by wire apparatus and its control method | |
| CN103569197B (en) | four-wheel steering system and control method thereof | |
| CN203254979U (en) | Four-wheel driving and four-wheel steering electronic differential control equipment of electric automobile | |
| CN107792168A (en) | Sleeve motor steer-by-wire device and control method | |
| CN110667693A (en) | A steering-by-wire system for an autonomous vehicle | |
| CN201347125Y (en) | Electric power steering mechanism having coupling control of force and displacement | |
| CN203581090U (en) | Four-wheel steering system | |
| CN2803861Y (en) | Electric boosting steering system | |
| CN201580431U (en) | Electronically controlled electric four-wheel steering (4WS) device for electric vehicles | |
| CN107310623A (en) | The dual-motor electric servo steering system and power-assisted steering method of a kind of parallel-connection structure | |
| CN207523780U (en) | A kind of automobile steering-by-wire executing agency and auto steerer | |
| CN202098457U (en) | Electrical control hydraulic four-wheel steering system | |
| CN108891480A (en) | A kind of electro-hydraulic power-assisted coupling steering system of fuel oil car | |
| CN102632921B (en) | Electric drive pusher type steering system controlled by coupling force and displacement and control method | |
| CN209321051U (en) | Actively electro-hydraulic coupling steering system and vehicle | |
| CN206067875U (en) | One kind is man-machine to drive type electric boosting steering system altogether | |
| CN109278679A (en) | An experimental vehicle based on independent control of dual motors | |
| CN201220608Y (en) | Electric tricycle and electric differential control device of electric automobile | |
| CN202358160U (en) | Turning control device for electric automobile | |
| CN106741132B (en) | Controller of multi-mode active steering system and control method thereof | |
| CN208630693U (en) | A kind of passenger car electric servo steering device | |
| CN206589958U (en) | A kind of active composite turning system and torque control unit | |
| CN210941940U (en) | A steering-by-wire system for an autonomous vehicle | |
| CN203854717U (en) | Electric power steering system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C17 | Cessation of patent right | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20120104 Termination date: 20120611 |