CN1480300A - 鱼形仿生机器人 - Google Patents
鱼形仿生机器人 Download PDFInfo
- Publication number
- CN1480300A CN1480300A CNA031320031A CN03132003A CN1480300A CN 1480300 A CN1480300 A CN 1480300A CN A031320031 A CNA031320031 A CN A031320031A CN 03132003 A CN03132003 A CN 03132003A CN 1480300 A CN1480300 A CN 1480300A
- Authority
- CN
- China
- Prior art keywords
- fish
- motor
- swing
- controller
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 239000011664 nicotinic acid Substances 0.000 title abstract description 20
- 241000251468 Actinopterygii Species 0.000 claims abstract description 112
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 claims abstract description 20
- 230000005540 biological transmission Effects 0.000 claims description 10
- 238000001514 detection method Methods 0.000 claims description 9
- 230000008447 perception Effects 0.000 claims description 4
- 239000012530 fluid Substances 0.000 claims description 2
- NBIIXXVUZAFLBC-UHFFFAOYSA-N Phosphoric acid Chemical compound OP(O)(O)=O NBIIXXVUZAFLBC-UHFFFAOYSA-N 0.000 claims 1
- 238000007667 floating Methods 0.000 abstract description 7
- 238000009941 weaving Methods 0.000 abstract 1
- 230000033001 locomotion Effects 0.000 description 11
- 238000007789 sealing Methods 0.000 description 11
- 210000004690 animal fin Anatomy 0.000 description 7
- 230000006870 function Effects 0.000 description 7
- 230000009182 swimming Effects 0.000 description 7
- 238000010586 diagram Methods 0.000 description 6
- 230000000007 visual effect Effects 0.000 description 6
- 230000005484 gravity Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 2
- 239000010985 leather Substances 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000036544 posture Effects 0.000 description 2
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 239000003292 glue Substances 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 239000003562 lightweight material Substances 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 239000000565 sealant Substances 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
Images


Landscapes
- Manipulator (AREA)
Abstract
鱼形仿生机器人是一种可以在水中游弋的鱼形机器人,该鱼形仿生机器人由鱼形外壳1及框架2、沉浮机构3、摇摆机构4、摆动机构5、信息感知机构6、控制器7及电源构成;鱼身11与鱼尾12之间为活动连接;框架密封在鱼形外壳内,沉浮机构、摇摆机构、信息感知机构、控制器及电源均安装在框架内;沉浮机构置于鱼头内,摇摆机构由摇摆电机41、曲柄摇杆机构42、伸出杆43、鱼鳍44左右各一个对称设置;摆动机构由摆动电机51连接驱动导出杆52组成,导出杆的外端连接驱动固定在鱼尾上的摆动连接件;信息感知机构中的距离传感器61设在鱼头的最前部,视觉传感器62设在鱼头前部的鱼眼位置,姿态传感器63、压力传感器64设在鱼身内;控制器7及电源设在鱼身11内。
Description
一、技术领域
本发明涉及仿生机器人,尤其是一种可以在水中游弋的鱼形机器人。
二、背景技术
现有的各类所谓“机器鱼”(例如CN2476316Y中所述的新型遥控多关节仿生机器鱼),虽然在外观造型上同实际鱼类比较接近,但它们在水中运动时,其运动特征由于机构、运动协调性等因素的影响同实际鱼类存在很大差距,也不能自主的实现游动中的障碍规避、实时沉浮等机能。
三、发明内容
1、技术问题
本发明的目的在于提供一种可以在水中完全模仿鱼类游动的鱼形仿生机器人。
2、技术方案
本发明的鱼形仿生机器人,由外壳和控制部分及驱动部分所组成,其特征在于该鱼形仿生机器人由鱼形外壳及框架、沉浮机构、摇摆机构、摆动机构、信息感知机构、控制器及电源构成;鱼身与鱼尾之间为活动连接;框架密封在鱼形外壳内,沉浮机构、摇摆机构、信息感知机构、控制器及电源均安装在框架内;沉浮机构置于鱼头内,由鱼头沉浮电机连接驱动丝杠,压块的上部套在驱动丝杠上,压块的下部压在水袋(34)旁,水袋内腔与外界通过导管连通;摇摆机构由摇摆电机连接驱动四连杆的曲柄摇杆机构,曲柄摇杆机构连接驱动伸出杆,伸出杆的外端连接鱼鳍,该部分为左右各一个对称设置;摆动机构由摆动电机连接驱动导出杆组成,导出杆的外端连接驱动固定在鱼尾上的摆动连接件;信息感知机构中的距离传感器设在鱼头的最前部,视觉传感器设在鱼头前部的鱼眼位置,姿态传感器、压力传感器设在鱼身内;控制器及电源设在鱼身内。
所述鱼尾部分可以是一节、两节或更多节,关节之间通过双摇杆传动机构与鱼身的后部连接。所述沉浮机构中的鱼头沉浮电机通过反馈电位计再与控制器中的电机驱动电路相连;摆动机构中的摆动电机通过反馈电位计再与控制器中的电机驱动电路相连。所述视觉传感器安装在鱼头两侧,为双目微型CCD摄像头。所述安装在鱼头最前部位的距离传感器为超声传感器。所述姿态传感器为高精度陀螺仪,安装在鱼身部位的检测仓内。所述压力传感器为流体压力传感器,同样安装在鱼身部位的检测仓内。鱼体密封结构可由头身密封腔和尾密封腔组成。尾密封腔可以是一节、两节或更多节。
所述控制器包括微处理器、信号采集器、信号转换器和电机驱动电路,相应的传感器分别与信号采集器相连,信号采集器与微处理器相连,微处理器再通过信号转换器与电机驱动电路相连,电机驱动电路与相应的电机相连;电源为自带电池,分别与相应的传感器、电机和控制器相连。
本发明的鱼体通过鱼尾以及尾鳍的摆动作为动力进行游动,这一运动是由摆动电机转动带动双摇杆传动机构运动从而最终实现鱼尾与尾鳍的摆动,使得鱼体自如游动。鱼体的平衡主要通过摇摆电机转动带动四连杆的曲柄摇杆机构运动从而最终实现鱼鳍的来回转动(即摇摆),鱼鳍利用其自身的摇摆和前进时水流对鳍的作用力,控制鱼身的摇摆。鱼体的沉浮则通过沉浮电机驱动丝杠带动压块改变水袋的体积、从而改变鱼头的重量而实现。在鱼体上安置的视觉、距离、姿态、压力等一系列传感器可以实时感知环境情况、获取环境信息;通过安装于鱼体的以微处理器为核心的控制器以及相应的控制软件使上述各个部分协调工作,模拟鱼在水下三维游动,自主的实现游动中的障碍规避、实时沉浮等机能。
3、有益效果
本发明的鱼形仿生机器人可以在水中完全模仿鱼类游动,能够全自主的模仿所设定的特定鱼类的巡游、机动运动以及规避障碍、实时自动沉浮等机能,从而实现了鱼形仿生机器人的智能化游动,并且在运动特征上具备该鱼种所特有的减阻特性和尾迹特性、推进效率。
四、附图说明
图1为本发明鱼形仿生机器人的总体结构示意图。
图2为本发明鱼形仿生机器人的总体结构俯视图。
图3为本发明鱼形仿生机器人的沉浮机构3的结构示意图。
图4为本发明鱼形仿生机器人的鱼身11部分的结构示意图。
图5为图4中本发明鱼形仿生机器人的摇摆机构4的前视结构示意图。
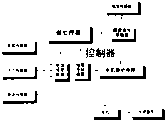
图6为本发明鱼形仿生机器人的控制器7的结构示意图。
图7为本发明鱼形仿生机器人的电机驱动电路示意图(图中只给出了其中一个电机的驱动电路,其余的都相同)。
图8为本发明鱼形仿生机器人的控制软件流程图。
以上图中有鱼形外壳1、鱼身11、检测仓10、鱼尾12;框架2;沉浮机构3、鱼头沉浮电机31、驱动丝杠32、压块33、水袋34、导管35、电位计36;摇摆机构4、摇摆电机41、曲柄摇杆机构42、伸出杆43、鱼鳍44;摆动机构5、摆动电机51、导出杆52、摆动连接件53、电位计54;信息感知机构6、距离传感器61、视觉传感器62、姿态传感器63、压力传感器64;控制器7;电源8。
五、具体实施方式
以下结合实例对本发明作详细描述:
从图中可以看出,本发明的鱼形仿生机器人总体结构主要由四个部分组成:
鱼头主要安置了沉浮机构3中的压块33、驱动丝杠32、水袋34和一些头部传感器,具体为距离传感器61、视觉传感器62;
鱼身装有控制器7及电源,鱼鳍摇摆电机41和四连杆的曲柄摇杆机构42,鱼头沉浮电机31,鱼尾摆动电机51和导出杆52双摇杆传动机构,以及一些鱼身传感器,具体为压力传感器64、姿态传感器63,都安装在这个部分,传感器安装在检测仓中。
主体部分以长方体外型为主,用轻质材料的外壳1套在主体部分外,使用防水胶与长方形外形的主体部分相连接,实现鱼的流线外形,也可自行设计所需的外形。尾鳍则可直接用轻质材料做成合适的形状。
在图3中,安置在鱼头部位的沉浮机构3由鱼头沉浮电机31、丝杠32、压块33、水袋34、电位计36组成。水袋34由可改变体积的构件,例如皮囊构成,工作时电机(本实施例的电机均采用佳能EN22-H12G58型12伏直流伺服电机,下同)获得转动指令,由丝杠32带动压块33挤压或放松皮囊,皮囊内腔通过内径大于1.5mm的硬质导管35与外界连通(本实施例采用内径2mm的不锈钢导管),水可以自由进出,这样就使整个鱼形仿生机器人的重量(尤其是头部的重量)发生了改变。同时,丝杠32转动的圈数通过电机输出轴与计数器机构相连,计数器机构为齿轮或齿形带传动(本实施例为齿形带传动)的电位计36,通过其信号线再与控制器7中的电机驱动电路相连。由电位计36将丝杠32的转动圈数反馈给电机驱动电路,记录压块33的实时位置,实现精确控制。为较好的实现沉浮功能,沉浮机构的水袋最大体积应为整个鱼体排水体积的十分之一到八分之一之间,本实施例为十分之一。
沉浮机构安置在头部的主要原因是可使鱼身的重心前后移动。对于鱼身来说,浮力的合力作用点是固定的,经过配重,可使鱼体保持在平衡位置,当水箱变大,则头部变重,不仅整个鱼身会变重,鱼身重心也会前移,鱼尾摆动可加速鱼的下沉。相反,鱼则上浮。
鱼身是鱼的主体,大多数结构都被安置在鱼身部分,如图4所示,除了沉浮电机31、鱼尾摆动电机51及对应的反馈器件(例如同上所述的计数器机构)外,还包括了鱼鳍驱动结构、电源8、控制器7和鱼体状态检测仓10等,下面分别介绍各个主要部分的结构和功用。
1.鱼鳍结构、密封及其作用
如图5所示,鱼鳍16的具体形状可根据使用者需要制作。两个鱼鳍44分别由左、右摇摆电机41控制,通过四连杆组成的曲柄摇杆机构42中的曲柄来回摇摆,带动与曲柄固定连接的鱼鳍伸出杆43来回转动,摇摆电机41的转动就变成了鱼鳍44在一定角度范围内(本实施例为37度)来回转动。因为鱼鳍44不提供鱼体前进的动力,所以负载较小,对伸出杆采用O型圈、密封圈压片所构成的结构进行密封。鱼鳍44的主要作用是控制鱼体的平衡。利用其自身的摆动和前进时水流对鳍的作用力,控制鱼身的摇摆,使鱼形仿真机器人在水中游动的平衡性更好并有更多的姿态。
2.鱼尾、尾鳍结构及其密封
鱼尾的摆动是由鱼尾摆动电机51通过双摇杆传动机构实现的(电机51由电位计54反馈控制)。鱼尾的摆动和尾鳍的摆动一样,是为鱼提供动力的重要运动部件。因为是在水下运动,密封是设计的重要问题。传统方法是将鱼整体用蒙皮包住,中间用多节骨架将蒙皮撑起,但通常由于蒙皮的弹性、韧性、密封性以及抗压变形能力很难同时达到要求,因此材料选择上存在较多问题,很难实现。本发明通过双摇杆机构将密封在箱体内的摆动电机51的转动通过导出杆52的平动传递到非密封区域鱼尾的转动,而平动的导出杆则运用可伸缩的橡皮分别在杆和箱体上作固定连结和密封就可以了,由于不需要保证外形,连接处也没有相对运动,所以容易实现。所述密封结构安装时还可在接合面处垫上软质垫片,并涂密封胶,以达到良好的密封效果。
根据所设定的鱼体外形或实际需要,鱼尾部分可以是一节、两节或更多节,关节之间通过双摇杆传动机构与鱼体的下一单元连接。亦即所述双摇杆传动机构与固定在鱼体下一单元上的摆动连接件相连。
尾鳍的摆动是由尾鳍摆动电机51通过双摇杆传动机构中的导出杆52实现对尾鳍的驱动(摆动电机51由电位计54反馈控制),其它结构和前一节的结构完全相同,这里不再详述。尾鳍通常是一节,其摆动连接件53直接固定在尾鳍上。
3.电源及配重
本实施例电池采用大容量的Li电池,多节串联,达到24v,给各电路供电。电池不仅是机器人能量的来源,也是相对较重的部分,因此,可以采用改变电池摆放位置的方式来调节鱼体的重心,使平衡时整个鱼体重心居于鱼体中部。
4.传感器
本实施例在鱼头部位安装了距离传感器61、视觉传感器62,以感知鱼体所处的周围环境、及时规避障碍;压力传感器64及姿态传感器63安装在鱼身部位的检测仓10内以便于密封(检测仓可设置在鱼身的任意位置,只要便于安装和接线),以感知鱼体所处水深和自身姿态。(本实施例距离传感器采用Echomax XRS-5 Transducer超声波传感器,视觉传感器采用双目微型CCD摄像头、具体型号为KAI-0330D图像传感器,压力传感器采用YX-PS-500压力传感器,姿态传感器采用IMU 400CA精密陀螺仪)
5.控制器系统
整个控制系统以控制器为核心。所述控制器包括微处理器、电信号采集器、电信号转换器、图象信号采集器和电机驱动电路(本实施例采用的微处理器为PC104工控机;PC104自身含有图象信号采集模块,因此不需要再单独设置图象信号采集器;电信号采集器与电信号转换器则采用DMM-16-AT型A/D-D/A卡,这一板卡将两者整合在了一起)。相应的传感器信号线分别与信号采集器相连,信号采集器再与微处理器相连(其中视觉传感器直接与PC104工控机的图象采集端口相连,压力、姿态、距离传感器均通过信号线与DMM-16-AT型A/D-D/A卡的输入口相连,A/D-D/A卡则直接插在微处理器的PCI插槽中),微处理器再通过A/D-D/A卡的输出口与电机驱动电路相连,电机驱动电路与相应的电机相连;控制器的微处理器中装有相应的处理软件(其实施例中软件流程图如图8所示),通过采集、分析、处理各个传感器所获取的信息,进行多传感器的信息融合,完成对环境、自身位置、姿态的认识,以确定运动模式,最终实现对各个功能电机的驱动。在本实施例中结合机械系统驱动的实际情况,对电机采用电压驱动。首先,控制器向各个电机驱动电路给出代表电机所需转动位置的电压量,电机驱动电路将这一位置电压量与反馈器件反馈回来的电压量进行比较,如果两者不一致就驱动电机转动,直到达到控制要求位置为止。电源为自带电池,分别与相应的传感器、电机和控制器相连。传感器、微处理器、电机驱动电路的电源线均通过柔性管道与电池相连,电机电源线通过柔性管道与电机驱动电路相连。
本发明通过以上各个部分的协调工作,能够全自主的模仿所设定的特定鱼类的巡游、机动运动以及规避障碍、实时自动沉浮等机能,从而实现了鱼形仿生机器人的智能化游动,并且在运动特征上具备该鱼种所特有的减阻特性和尾迹特性、推进效率。
Claims (7)
1、一种鱼形仿生机器人,由外壳和控制部分及驱动部分所组成,其特征在于该鱼形仿生机器人由鱼形外壳(1)及框架(2)、沉浮机构(3)、摇摆机构(4)、摆动机构(5)、信息感知机构(6)、控制器(7)及电源构成;鱼身(11)与鱼尾(12)之间为活动连接;框架(2)密封在鱼形外壳(1)内,沉浮机构(3)、摇摆机构(5)、信息感知机构(6)、控制器(7)及电源均安装在框架(2)内;沉浮机构(3)置于鱼头内,由鱼头沉浮电机(31)连接驱动丝杠(32),压块(33)的上部套在驱动丝杠(32)上,压块(33)的下部压在水袋(34)旁,水袋(34)内腔与外界通过导管(35)连通;摇摆机构(4)由摇摆电机(41)连接驱动四连杆的曲柄摇杆机构(42),曲柄摇杆机构(42)连接驱动伸出杆(43),伸出杆(43)的外端连接鱼鳍(44),该部分为左右各一个对称设置;摆动机构(5)由摆动电机(51)连接驱动导出杆(52)组成,导出杆(52)的外端连接驱动固定在鱼尾(12)上的摆动连接件(53);信息感知机构(6)中的距离传感器(61)设在鱼头的最前部,视觉传感器(62)设在鱼头前部的鱼眼位置,姿态传感器(63)、压力传感器(64)设在鱼身(11)内;控制器(7)及电源设在鱼身(11)内。
2、根据权利要求1所述的鱼形仿生机器人,其特征在于所述鱼尾(12)部分可以是一节、两节或更多节,关节之间通过双摇杆传动机构与鱼身(11)的后部连接。
3、根据权利要求1所述的鱼形仿生机器人,其特征在于所述沉浮机构(3)中的鱼头沉浮电机(31)通过反馈电位计(36)再与控制器(7)中的电机驱动电路相连;摆动机构(5)中的摆动电机(51)通过反馈电位计(54)再与控制器(7)中的电机驱动电路相连。
4、根据权利要求1所述的鱼形仿生机器人,其特征在于所述视觉传感器(62)安装在鱼头两侧,为双目微型CCD摄像头。
5、根据权利要求1所述的鱼形仿生机器人,其特征在于所述安装在鱼头最前部位的距离传感器(61)为超声传感器。
6、根据权利要求1所述的鱼形仿生机器人,其特征在于所述姿态传感器(63)为高精度陀螺仪,安装在鱼身(11)部位的检测仓(10)内。
7、根据权利要求1所述的鱼形仿生机器人,其特征在于所述压力传感器(64)为流体压力传感器,同样安装在鱼身(11)部位的检测仓(10)内。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CNA031320031A CN1480300A (zh) | 2003-07-09 | 2003-07-09 | 鱼形仿生机器人 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CNA031320031A CN1480300A (zh) | 2003-07-09 | 2003-07-09 | 鱼形仿生机器人 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN1480300A true CN1480300A (zh) | 2004-03-10 |
Family
ID=34153940
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNA031320031A Pending CN1480300A (zh) | 2003-07-09 | 2003-07-09 | 鱼形仿生机器人 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN1480300A (zh) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100458625C (zh) * | 2007-03-23 | 2009-02-04 | 北京大学 | 一种水下仿生机器人协作运输方法 |
| CN1976252B (zh) * | 2005-11-28 | 2011-03-30 | 中国科学院自动化研究所 | 应用于仿生机器鱼的水面信息中继系统 |
| CN102880080A (zh) * | 2012-10-15 | 2013-01-16 | 河海大学 | 仿生鱼体感交互式方法 |
| CN104875868A (zh) * | 2015-05-15 | 2015-09-02 | 中国科学技术大学 | 一种基于双斜面偏转关节的机器鱼 |
| CN105171729A (zh) * | 2015-08-14 | 2015-12-23 | 桂林电子科技大学 | 一种仿泥鳅的水下淤泥探测机器人 |
| CN107101944A (zh) * | 2017-05-22 | 2017-08-29 | 饶伊珂 | 一种鱼型水质检测装置 |
| CN108639184A (zh) * | 2018-06-13 | 2018-10-12 | 辽宁石油化工大学 | 一种新型仿生关节机械腿 |
| WO2018195918A1 (zh) * | 2017-04-28 | 2018-11-01 | 博雅工道(北京)机器人科技有限公司 | 一种单关节水中机器鱼 |
| CN109987209A (zh) * | 2019-02-20 | 2019-07-09 | 博雅工道(北京)机器人科技有限公司 | 一种仿生机器鱼的控制电路 |
| CN114351672A (zh) * | 2022-02-10 | 2022-04-15 | 武汉工程大学 | 仿生儒艮湖泊垃圾清理机器人 |
| CN114698573A (zh) * | 2022-04-02 | 2022-07-05 | 中国农业大学 | 一种基于柔性弯曲传感器的鱼类健康程度检测方法及系统 |
-
2003
- 2003-07-09 CN CNA031320031A patent/CN1480300A/zh active Pending
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1976252B (zh) * | 2005-11-28 | 2011-03-30 | 中国科学院自动化研究所 | 应用于仿生机器鱼的水面信息中继系统 |
| CN100458625C (zh) * | 2007-03-23 | 2009-02-04 | 北京大学 | 一种水下仿生机器人协作运输方法 |
| CN102880080A (zh) * | 2012-10-15 | 2013-01-16 | 河海大学 | 仿生鱼体感交互式方法 |
| CN104875868A (zh) * | 2015-05-15 | 2015-09-02 | 中国科学技术大学 | 一种基于双斜面偏转关节的机器鱼 |
| CN105171729A (zh) * | 2015-08-14 | 2015-12-23 | 桂林电子科技大学 | 一种仿泥鳅的水下淤泥探测机器人 |
| US10336420B2 (en) | 2017-04-28 | 2019-07-02 | BOYA GONGDAO (Beijing) ROBOT Technology Co., Ltd. | Single-joint underwater robot fish |
| WO2018195918A1 (zh) * | 2017-04-28 | 2018-11-01 | 博雅工道(北京)机器人科技有限公司 | 一种单关节水中机器鱼 |
| CN107101944A (zh) * | 2017-05-22 | 2017-08-29 | 饶伊珂 | 一种鱼型水质检测装置 |
| CN108639184A (zh) * | 2018-06-13 | 2018-10-12 | 辽宁石油化工大学 | 一种新型仿生关节机械腿 |
| CN108639184B (zh) * | 2018-06-13 | 2023-04-25 | 辽宁石油化工大学 | 一种新型仿生关节机械腿 |
| CN109987209A (zh) * | 2019-02-20 | 2019-07-09 | 博雅工道(北京)机器人科技有限公司 | 一种仿生机器鱼的控制电路 |
| CN114351672A (zh) * | 2022-02-10 | 2022-04-15 | 武汉工程大学 | 仿生儒艮湖泊垃圾清理机器人 |
| CN114698573A (zh) * | 2022-04-02 | 2022-07-05 | 中国农业大学 | 一种基于柔性弯曲传感器的鱼类健康程度检测方法及系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN2628239Y (zh) | 仿生机器鱼 | |
| US11161578B2 (en) | Biomimetic robotic manta ray | |
| CN101456341B (zh) | 多模态仿生两栖机器人 | |
| CN209956198U (zh) | 一种同步升潜串联舵机仿生机器鱼 | |
| CN103358305B (zh) | 可闭环控制的多功能水中蛇形机器人 | |
| CN107310705A (zh) | 一种仿腔棘鱼的水下机器人 | |
| CN1480300A (zh) | 鱼形仿生机器人 | |
| CN206633010U (zh) | 一种带计算机视觉功能的机器蛇 | |
| CN101767642A (zh) | 一种水下仿生机器鱼 | |
| CN207607626U (zh) | 一种仿箱鲀科自主机器鱼 | |
| CN108656884A (zh) | 一种水陆两栖仿生机器人 | |
| CN106005333A (zh) | 一种鲹科类仿生机器鱼 | |
| CN114537629B (zh) | 基于复合连杆机构的尾鳍推进自主游动仿生机器鱼 | |
| CN206231595U (zh) | 仿生海蛇装置 | |
| CN109115979A (zh) | 便携式多功能立体水质探测装置 | |
| CN219904704U (zh) | 一种多功能智能仿生机器鱼 | |
| CN106143843B (zh) | 一种仿生龟 | |
| CN2868840Y (zh) | 一种仿生机器鱼 | |
| CN110316341A (zh) | 一种仿生机器旗鱼 | |
| CN210455158U (zh) | 一种基于关节型机械臂的仿生蝠鲼 | |
| CN204775952U (zh) | 一种基于双斜面偏转关节的机器鱼 | |
| CN208906676U (zh) | 一种水陆两栖仿生机器人 | |
| CN218431681U (zh) | 可净化水质和水下探测的仿生海龟机器人 | |
| CN210634736U (zh) | 一种仿生机器旗鱼 | |
| CN205801466U (zh) | 一种仿生龟装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C02 | Deemed withdrawal of patent application after publication (patent law 2001) | ||
| WD01 | Invention patent application deemed withdrawn after publication |