CN116350407A - Surgical host computer and surgical system for measuring the length of lower limbs in hip replacement - Google Patents
Surgical host computer and surgical system for measuring the length of lower limbs in hip replacement Download PDFInfo
- Publication number
- CN116350407A CN116350407A CN202111625035.0A CN202111625035A CN116350407A CN 116350407 A CN116350407 A CN 116350407A CN 202111625035 A CN202111625035 A CN 202111625035A CN 116350407 A CN116350407 A CN 116350407A
- Authority
- CN
- China
- Prior art keywords
- surgical
- intraoperative
- registration
- coordinate system
- host computer
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/107—Measuring physical dimensions, e.g. size of the entire body or parts thereof
- A61B5/1072—Measuring physical dimensions, e.g. size of the entire body or parts thereof measuring distances on the body, e.g. measuring length, height or thickness
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/107—Measuring physical dimensions, e.g. size of the entire body or parts thereof
- A61B5/1075—Measuring physical dimensions, e.g. size of the entire body or parts thereof for measuring dimensions by non-invasive methods, e.g. for determining thickness of tissue layer
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/107—Measuring physical dimensions, e.g. size of the entire body or parts thereof
- A61B5/1079—Measuring physical dimensions, e.g. size of the entire body or parts thereof using optical or photographic means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/46—Special tools for implanting artificial joints
- A61F2/4657—Measuring instruments used for implanting artificial joints
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/101—Computer-aided simulation of surgical operations
- A61B2034/105—Modelling of the patient, e.g. for ligaments or bones
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2068—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis using pointers, e.g. pointers having reference marks for determining coordinates of body points
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/061—Measuring instruments not otherwise provided for for measuring dimensions, e.g. length
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/46—Special tools for implanting artificial joints
- A61F2002/4632—Special tools for implanting artificial joints using computer-controlled surgery, e.g. robotic surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/46—Special tools for implanting artificial joints
- A61F2/4657—Measuring instruments used for implanting artificial joints
- A61F2002/4658—Measuring instruments used for implanting artificial joints for measuring dimensions, e.g. length
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Veterinary Medicine (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Pathology (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Physics & Mathematics (AREA)
- Dentistry (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Transplantation (AREA)
- Robotics (AREA)
- Physical Education & Sports Medicine (AREA)
- Cardiology (AREA)
- Vascular Medicine (AREA)
- Prostheses (AREA)
Abstract
本申请提供一种用于髋关节置换术下肢长度测量的手术上位机及手术系统,涉及手术设备领域。一种手术上位机,包括:处理器;以及存储器,存储有第一程序,当所述第一程序被所述处理器执行时,使得所述处理器执行所述手术上位机的术中执行模式,所述术中执行模式包括:实时获取术中下肢医学图像,并基于所述术中下肢医学图像获取骨盆和股骨的术中三维模型;响应用户的操作,对骨盆和股骨分别进行配准以进行下肢长度测量;置换假体后,在所述术中三维模型上对用户选取的多个术中骨性点进行标注;基于所述多个术中骨性点计算并获取所述术中下肢长度。根据本申请的实施例,可在髋关节置换术中精确、实时地测量下肢长度变化。
The application provides a surgical host computer and a surgical system for measuring the length of lower limbs in hip replacement surgery, which relate to the field of surgical equipment. A surgical host computer, comprising: a processor; and a memory storing a first program, when the first program is executed by the processor, the processor is executed in an intraoperative execution mode of the surgical host computer , the intraoperative execution mode includes: acquiring intraoperative lower limb medical images in real time, and acquiring intraoperative three-dimensional models of the pelvis and femur based on the intraoperative lower limb medical images; responding to user operations, registering the pelvis and femur respectively to Measure the length of the lower limb; after replacing the prosthesis, mark the multiple intraoperative bony points selected by the user on the intraoperative three-dimensional model; calculate and obtain the intraoperative lower limb based on the multiple intraoperative bony points length. According to the embodiments of the present application, it is possible to accurately and real-time measure the change in length of the lower limb during hip replacement.
Description
技术领域technical field
本申请涉及手术设备领域,具体而言,涉及一种用于髋关节置换术下肢长度测量的手术上位机及手术系统。The present application relates to the field of surgical equipment, in particular, to a surgical host computer and a surgical system for measuring the length of lower limbs in hip replacement surgery.
背景技术Background technique
髋关节置换术(THA)是临床上用来治疗髋部疾病的常用方式,临床效果显著,是治疗严重髋关节疼痛、畸形、功能障碍的一种有效的临床术式,在国内外得到了广泛的开展。Hip arthroplasty (THA) is a commonly used method for the treatment of hip diseases in clinical practice. development.
但在THA术后,容易出现双下肢不等长(LLD)的并发症。LLD的出现可能会导致患者出现脊柱侧弯、骨盆倾斜、坐骨神经麻痹、腰背痛、假体松动、跛行等现象,不利于患者术后康复。因此,临床上对全髋关节置换术中的LLD现象高度重视。However, after THA, the complication of lower limb unequal length (LLD) is prone to occur. The appearance of LLD may lead to scoliosis, pelvic tilt, sciatic nerve palsy, low back pain, loose prosthesis, claudication and other phenomena in patients, which is not conducive to postoperative rehabilitation of patients. Therefore, the phenomenon of LLD in total hip arthroplasty is highly valued clinically.
现有技术中,为了预防LLD现象的出现,医生采用的常规方法包括使用卷尺和站立在手术前或手术后评估LLD。在术中,LLD通常是通过在患者仰卧时触诊股骨远端或踝关节来手动测量的,具有局限性,可能无法提供可靠的LLD测量值。其他方法如术中缝线法虽然操作简单、成本低,但可能会因为患者皮肤弹性、患肢放置位置变动等使结果出现误差。克氏针定位法虽然术后能有效控制患者肢体延长且操作简单,但其精度不高。In the prior art, in order to prevent the occurrence of LLD phenomena, the routine methods adopted by doctors include using a tape measure and standing to assess LLD before or after surgery. Intraoperatively, LLD is usually measured manually by palpating the distal femur or ankle while the patient is supine, which has limitations and may not provide reliable LLD measurements. Although other methods such as the intraoperative suture method are simple to operate and low in cost, there may be errors in the results due to the elasticity of the patient's skin and changes in the position of the affected limb. Although the Kirschner wire positioning method can effectively control the patient's limb extension after operation and is easy to operate, its accuracy is not high.
因此,需要一种操作简单、可靠、可重复的、精确度高的用于全髋关节置换术中的下肢长度测量方法或装置。Therefore, there is a need for a simple, reliable, repeatable, and high-precision method or device for measuring the length of a lower limb used in total hip replacement.
发明内容Contents of the invention
本申请提供一种用于髋关节置换术下肢长度测量的手术上位机及手术系统,无需使用额外工具及操作即可进行下肢长度测量,实现髋关节置换术中下肢长度变化的精确测量并实时显示测量结果,可兼容传统的手持导航系统和机器人辅助导航系统,防止双下肢不等长的出现。This application provides a surgical host computer and a surgical system for measuring the length of lower limbs in hip replacement surgery, which can measure the length of lower limbs without using additional tools and operations, and realize accurate measurement and real-time display of changes in the length of lower limbs in hip replacement surgery The measurement results are compatible with traditional handheld navigation systems and robot-assisted navigation systems to prevent the occurrence of unequal lengths of the lower limbs.
根据本申请的一方面,提供一种手术上位机,分别与骨盆示踪器及股骨示踪器连接,用于髋关节置换手术中测量下肢长度并获取测量数据,所述测量数据包括实际下肢长度和术中下肢长度,所述手术上位机包括:处理器;以及存储器,存储有第一程序,当所述第一程序被所述处理器执行时,使得所述处理器执行所述手术上位机的术中执行模式,所述术中执行模式包括:实时获取术中下肢医学图像,并基于所述术中下肢医学图像获取骨盆和股骨的术中三维模型;响应用户的操作,对骨盆和股骨分别进行配准以进行下肢长度测量;置换假体后,在所述术中三维模型上对用户选取的多个术中骨性点进行标注;基于所述多个术中骨性点计算并获取所述术中下肢长度。According to one aspect of the present application, a surgical host computer is provided, which is respectively connected with a pelvic tracker and a femur tracker, and is used for measuring the length of the lower limbs and obtaining measurement data during hip replacement surgery, the measurement data including the actual length of the lower limbs and the length of the lower limbs during the operation, the surgical upper computer includes: a processor; and a memory storing a first program, when the first program is executed by the processor, the processor is made to execute the surgical upper computer The intraoperative execution mode includes: obtaining intraoperative lower limb medical images in real time, and obtaining intraoperative three-dimensional models of the pelvis and femur based on the intraoperative lower extremity medical images; Perform registration respectively to measure the length of the lower limbs; after replacing the prosthesis, mark multiple intraoperative bony points selected by the user on the intraoperative three-dimensional model; calculate and obtain based on the multiple intraoperative bony points Intraoperative lower extremity length.
根据一些实施例,对骨盆和股骨进行配准包括粗配准和精配准。According to some embodiments, registering the pelvis and the femur includes coarse registration and fine registration.
根据一些实施例,所述粗配准包括:获取术前下肢医学图像,在所述术前下肢医学图像上对用户选取的多个第一图像配准点进行标注并获取图像坐标系坐标;对与所述多个第一图像配准点对应的骨面上的多个第一手术配准点进行标注并获取相机坐标系坐标;基于所述第一图像配准点的图像坐标系坐标和所述第一手术配准点的相机坐标系坐标,分别获取图像坐标系与相机坐标系转换的骨盆粗配准矩阵和股骨粗配准矩阵。According to some embodiments, the rough registration includes: acquiring a preoperative lower extremity medical image, marking a plurality of first image registration points selected by the user on the preoperative lower extremity medical image and obtaining image coordinate system coordinates; Marking multiple first surgical registration points on the bone surface corresponding to the multiple first image registration points and obtaining camera coordinate system coordinates; based on the image coordinate system coordinates of the first image registration points and the first surgery The coordinates of the camera coordinate system of the registration point are obtained respectively to obtain the coarse registration matrix of the pelvis and the coarse registration matrix of the femur converted from the image coordinate system and the camera coordinate system.
根据一些实施例,所述精配准包括:对用户在骨面上选取的多个第二手术配准点进行标注并获取相机坐标系坐标;分别通过所述骨盆粗配准矩阵和所述股骨粗配准矩阵获取所述多个第二手术配准点对应的多个第二图像配准点并获取图像坐标系坐标;基于所述第二图像配准点的图像坐标系坐标和所述第二手术配准点的相机坐标系坐标,分别获取图像坐标系与相机坐标系转换的骨盆精配准矩阵和股骨精配准矩阵。According to some embodiments, the fine registration includes: marking a plurality of second surgical registration points selected by the user on the bone surface and obtaining the coordinates of the camera coordinate system; The registration matrix obtains a plurality of second image registration points corresponding to the plurality of second surgical registration points and obtains image coordinate system coordinates; based on the image coordinate system coordinates of the second image registration points and the second surgical registration point The coordinates of the camera coordinate system are used to obtain the pelvis fine registration matrix and the femur fine registration matrix converted from the image coordinate system and the camera coordinate system respectively.
根据一些实施例,所述多个术中骨性点包括术中旋转中心、股骨远端中心、小粗隆和髂前上棘。According to some embodiments, the plurality of intraoperative bony points includes an intraoperative center of rotation, a center of the distal femur, a lesser trochanter, and an anterior superior iliac spine.
根据一些实施例,所述术中旋转中心为置换假体后的术中髋臼中心或术中股骨中心。According to some embodiments, the intraoperative center of rotation is the intraoperative acetabular center or the intraoperative femoral center after replacement of the prosthesis.
根据一些实施例,计算并获取术中下肢长度,包括:响应用户操作,获取所述术中旋转中心的相机坐标系坐标,并通过所述骨盆精配准矩阵转换为图像坐标系坐标;实时获取股骨在相机坐标系的位置和方向,并通过所述股骨精配准矩阵转换为图像坐标系坐标;围绕所述术中旋转中心旋转所述术中三维模型,使得所述术中股骨中心与所述股骨远端中心的连线形成的第一力线垂直于横断面,并且所述术中旋转中心和所述第一力线构成的平面平行于冠状面;计算所述小粗隆到所述髂前上棘所在横断面的距离并获取所述术中下肢长度。According to some embodiments, calculating and obtaining the length of the lower limbs during the operation includes: responding to user operations, obtaining the coordinates of the camera coordinate system of the center of rotation during the operation, and converting them into coordinates of the image coordinate system through the fine registration matrix of the pelvis; obtaining in real time The position and orientation of the femur in the camera coordinate system are transformed into coordinates of the image coordinate system through the femoral fine registration matrix; the intraoperative three-dimensional model is rotated around the intraoperative rotation center so that the intraoperative femoral center is in line with the The first line of force formed by the connecting line of the center of the distal end of the femur is perpendicular to the transverse plane, and the plane formed by the center of rotation in the operation and the first line of force is parallel to the coronal plane; the calculation of the lesser trochanter to the The distance of the cross-section where the anterior superior iliac spine is located and the length of the lower extremity in the operation were obtained.
根据一些实施例,所述存储器还存储有第二程序,当所述第二程序被所述处理器执行时,使得所述处理器执行所述手术上位机的术前规划模式,所述术前规划模式包括:获取所述术前下肢医学图像,并基于所述术前下肢医学图像获取骨盆和股骨的术前三维模型;在所述术前三维模型上对用户选择的多个术前骨性点进行标注,并根据用户的操作进行骨盆和股骨的转正;基于所述多个术前骨性点计算所述实际下肢长度。According to some embodiments, the memory also stores a second program, and when the second program is executed by the processor, the processor is made to execute the preoperative planning mode of the surgical host computer, the preoperative The planning mode includes: obtaining the preoperative lower limb medical image, and obtaining a preoperative three-dimensional model of the pelvis and femur based on the preoperative lower limb medical image; Points are marked, and the pelvis and femur are corrected according to the user's operation; the actual lower limb length is calculated based on the multiple preoperative bony points.
根据一些实施例,所述多个术前骨性点包括所述髂前上棘、术前旋转中心、耻骨联合点、所述小粗隆和所述股骨远端中心。According to some embodiments, the plurality of preoperative bony points include the anterior superior iliac spine, preoperative center of rotation, pubic symphysis point, the lesser trochanter, and the center of the distal femur.
根据一些实施例,所述术前旋转中心为为置换假体前人体实际的髋臼中心或股骨中心。According to some embodiments, the preoperative center of rotation is the actual acetabular center or femoral center of the human body before the replacement of the prosthesis.
根据一些实施例,骨盆和股骨的转正包括:旋转所述术前三维模型,使得所述髂前上棘的连线平行于图像坐标系的横轴并且平行于冠状面。According to some embodiments, the straightening of the pelvis and the femur includes: rotating the preoperative three-dimensional model so that the connecting line of the anterior superior iliac spine is parallel to the horizontal axis of the image coordinate system and parallel to the coronal plane.
根据一些实施例,骨盆和股骨的转正还包括:旋转所述术前三维模型,使得所述髂前上棘的连线平行于图像坐标系的横轴,并且所述髂前上棘与所述耻骨联合点构成的平面平行于冠状面。According to some embodiments, the normalization of the pelvis and the femur further includes: rotating the preoperative three-dimensional model so that the connecting line of the anterior superior iliac spine is parallel to the horizontal axis of the image coordinate system, and the anterior superior iliac spine and the The plane formed by the pubic symphysis is parallel to the coronal plane.
根据一些实施例,计算所述实际下肢长度,包括:围绕所述术前旋转中心旋转所述术前三维模型,使得由所述人体实际的股骨中心与所述股骨远端中心的连线形成的第二力线垂直于横断面,并且所述术前旋转中心和所述第二力线构成的平面平行于冠状面;计算所述小粗隆到所述髂前上棘所在横断面的距离并获取所述实际下肢长度。According to some embodiments, calculating the actual lower limb length includes: rotating the preoperative three-dimensional model around the preoperative rotation center, so that The second line of force is perpendicular to the cross-section, and the plane formed by the preoperative center of rotation and the second line of force is parallel to the coronal plane; calculate the distance from the lesser trochanter to the cross-section where the anterior superior iliac spine is located and Obtain the actual lower limb length.
根据本申请的一方面,提供一种手术系统,包括如前述的手术上位机;以及骨盆示踪器及校验铆钉;股骨示踪器及校验铆钉;导航相机,用于获取骨盆、股骨以及选取的骨性点的实时位置信息,并与所述手术上位机通信连接;探针,用于选取所述骨性点;显示器,与所述手术上位机连接,用于可视化显示实时人机交互信息。According to one aspect of the present application, a surgical system is provided, including the aforementioned surgical host computer; and a pelvis tracker and a check rivet; a femur tracker and a check rivet; The real-time position information of the selected bony point is communicated with the surgical host computer; the probe is used to select the bony point; the display is connected to the surgical host computer for visual display of real-time human-computer interaction information.
根据本申请的实施例,通过对术前规划图像的分析,以及在术中依据医学影像对患者骨盆进行配准等操作,实现髋关节置换术中下肢长度变化的精确测量与计算,并实时显示测量结果,有效预防下肢不等长现象。According to the embodiment of the present application, through the analysis of the preoperative planning images and the registration of the patient's pelvis according to the medical images during the operation, the precise measurement and calculation of the length change of the lower limbs during the hip replacement operation can be realized and displayed in real time The measurement results can effectively prevent the unequal length of the lower limbs.
应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本申请。It is to be understood that both the foregoing general description and the following detailed description are exemplary only and are not restrictive of the application.
附图说明Description of drawings
为了更清楚地说明本申请实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例。In order to more clearly illustrate the technical solutions in the embodiments of the present application, the following will briefly introduce the drawings that need to be used in the description of the embodiments. Apparently, the drawings in the following description are only some embodiments of the present application.
图1示出根据本申请示例实施例的手术上位机术前规划模式的流程图。Fig. 1 shows a flowchart of a preoperative planning mode of a surgical host computer according to an exemplary embodiment of the present application.
图2A示出根据本申请示例实施例的骨盆骨性点的示意图。FIG. 2A shows a schematic diagram of the bony points of the pelvis according to an example embodiment of the present application.
图2B示出根据本申请示例实施例的股骨骨性点的示意图。FIG. 2B shows a schematic diagram of a femoral bony point according to an exemplary embodiment of the present application.
图2C示出根据本申请示例实施例的股骨远端骨性点的示意图。Fig. 2C shows a schematic diagram of the bony point of the distal femur according to an exemplary embodiment of the present application.
图3A示出根据本申请示例实施例的转正前的下肢三维模型示意图。Fig. 3A shows a schematic diagram of a three-dimensional model of a lower limb before normalization according to an exemplary embodiment of the present application.
图3B示出根据本申请示例实施例的转正后的下肢三维模型示意图。Fig. 3B shows a schematic diagram of a three-dimensional model of a lower limb after normalization according to an exemplary embodiment of the present application.
图4A示出根据本申请示例实施例的实际下肢长度的计算过程示意图。Fig. 4A shows a schematic diagram of the calculation process of the actual lower limb length according to an exemplary embodiment of the present application.
图4B示出根据本申请示例实施例的进行假体置换规划的数据展示图。Fig. 4B shows a data display diagram for prosthesis replacement planning according to an exemplary embodiment of the present application.
图5示出根据本申请示例实施例的手术上位机术中执行模式的流程图。Fig. 5 shows a flow chart of the intraoperative execution mode of the surgical host computer according to an exemplary embodiment of the present application.
图6A示出根据本申请示例实施例的骨盆粗配准的配准点示意图。Fig. 6A shows a schematic diagram of registration points for coarse registration of the pelvis according to an exemplary embodiment of the present application.
图6B示出根据本申请示例实施例的骨盆精配准的配准点示意图。Fig. 6B shows a schematic diagram of registration points for fine registration of the pelvis according to an exemplary embodiment of the present application.
图7A示出根据本申请示例实施例的股骨粗配准的配准点示意图。Fig. 7A shows a schematic diagram of registration points for coarse registration of a femur according to an exemplary embodiment of the present application.
图7B示出根据本申请示例实施例的股骨精配准的配准点示意图。Fig. 7B shows a schematic diagram of registration points of femur fine registration according to an exemplary embodiment of the present application.
图8示出根据本申请示例实施例的术中下肢长度的计算过程示意图。Fig. 8 shows a schematic diagram of a calculation process of an intraoperative lower limb length according to an exemplary embodiment of the present application.
图9示出根据本申请示例实施例的手术上位机的框图。Fig. 9 shows a block diagram of a surgical host computer according to an exemplary embodiment of the present application.
具体实施方式Detailed ways
现在将参考附图更全面地描述示例实施例。然而,示例实施例能够以多种形式实施,且不应被理解为限于在此阐述的实施例;相反,提供这些实施例使得本申请将全面和完整,并将示例实施例的构思全面地传达给本领域的技术人员。在图中相同的附图标记表示相同或类似的部分,因而将省略对它们的重复描述。Example embodiments will now be described more fully with reference to the accompanying drawings. Example embodiments may, however, be embodied in many forms and should not be construed as limited to the embodiments set forth herein; rather, these embodiments are provided so that this application will be thorough and complete, and will fully convey the concept of example embodiments to those skilled in the art. The same reference numerals denote the same or similar parts in the drawings, and thus their repeated descriptions will be omitted.
所描述的特征、结构或特性可以以任何合适的方式结合在一个或更多实施例中。在下面的描述中,提供许多具体细节从而给出对本公开的实施例的充分理解。然而,本领域技术人员将意识到,可以实践本公开的技术方案而没有这些特定细节中的一个或更多,或者可以采用其它的方式、组元、材料、装置或操作等。在这些情况下,将不详细示出或描述公知结构、方法、装置、实现、材料或者操作。The described features, structures, or characteristics may be combined in any suitable manner in one or more embodiments. In the following description, numerous specific details are provided in order to give a thorough understanding of embodiments of the present disclosure. However, those skilled in the art will appreciate that the technical solutions of the present disclosure may be practiced without one or more of these specific details, or other methods, components, materials, devices or operations may be used. In these instances, well-known structures, methods, devices, implementations, materials, or operations are not shown or described in detail.
附图中所示的流程图仅是示例性说明,不是必须包括所有的内容和操作/步骤,也不是必须按所描述的顺序执行。例如,有的操作/步骤还可以分解,而有的操作/步骤可以合并或部分合并,因此实际执行的顺序有可能根据实际情况改变。The flow charts shown in the drawings are only exemplary illustrations, and do not necessarily include all contents and operations/steps, nor must they be performed in the order described. For example, some operations/steps can be decomposed, and some operations/steps can be combined or partly combined, so the actual order of execution may be changed according to the actual situation.
本申请的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别不同对象,而不是用于描述特定顺序。此外,术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可选地还包括没有列出的步骤或单元,或可选地还包括对于这些过程、方法、产品或设备固有的其他步骤或单元。The terms "first", "second" and the like in the description and claims of the present application and the above drawings are used to distinguish different objects, rather than to describe a specific order. Furthermore, the terms "include" and "have", as well as any variations thereof, are intended to cover a non-exclusive inclusion. For example, a process, method, system, product or device comprising a series of steps or units is not limited to the listed steps or units, but optionally also includes unlisted steps or units, or optionally further includes For other steps or units inherent in these processes, methods, products or devices.
本申请提供一种手术上位机,可通过术前规划图像以及在术中依据医学影像对骨盆进行配准等操作,精确计算髋关节置换术中下肢长度变化并实时显示测量数据,有效预防下肢不等长现象,并且兼容传统的手持导航系统和机器人辅助导航系统。This application provides a surgical host computer, which can accurately calculate the length change of the lower limbs during hip replacement surgery and display the measurement data in real time through preoperative planning images and intraoperative registration of the pelvis based on medical images, so as to effectively prevent lower limbs. Isometric phenomenon, and compatible with traditional handheld navigation systems and robot-assisted navigation systems.
下面将参照附图,对根据本申请实施例的一种手术上位机进行详细说明。A surgical host computer according to an embodiment of the present application will be described in detail below with reference to the accompanying drawings.
图1示出根据本申请示例实施例的手术上位机术前规划模式的流程图。Fig. 1 shows a flowchart of a preoperative planning mode of a surgical host computer according to an exemplary embodiment of the present application.
如图1所示,在S101,获取患者的术前下肢医学影像数据,并依据医学影像数据获取骨盆和股骨的三维模型。As shown in FIG. 1 , at S101 , the preoperative lower limb medical image data of the patient are obtained, and the three-dimensional models of the pelvis and femur are obtained according to the medical image data.
一般地,医学影像数据包括计算机断层扫描数据(CT)和磁共振成像数据(MRI)。Generally, medical imaging data includes computed tomography data (CT) and magnetic resonance imaging data (MRI).
根据一些实施例,通过对医学影像进行分割获取骨盆和股骨的三维模型图像。According to some embodiments, the three-dimensional model images of the pelvis and the femur are obtained by segmenting the medical image.
在S103,在三维模型上选取骨盆和股骨上的多个骨性点。In S103, multiple bony points on the pelvis and femur are selected on the three-dimensional model.
根据一些实施例,用户通过显示器显示的人机交互界面,在三维模型上选取骨性点。According to some embodiments, the user selects bony points on the three-dimensional model through the human-computer interaction interface displayed on the display.
例如,三维模型上的多个骨性点包括髂前上棘(左右两侧)、术前旋转中心(置换假体前人体实际的髋臼中心或股骨中心)、耻骨联合点、小粗隆和股骨远端中心,如图2A-图2C所示。For example, multiple bony points on the 3D model include the anterior superior iliac spine (left and right sides), preoperative center of rotation (actual acetabular center or femoral center of the human body before replacement of the prosthesis), pubic symphysis point, lesser trochanter and The center of the distal femur, as shown in Figure 2A-Figure 2C.
根据一些实施例,也可在骨盆和股骨转正后选取骨性点。According to some embodiments, bony points may also be selected after the pelvis and femur are normalized.
在S105,将骨盆和股骨转正。At S105, the pelvis and femur are brought to normal position.
转正前的下肢三维模型,以显示器的正向角度观察,三维模型处于非正直的形态;在图像坐标系中,三维模型也处于非正直的形态,如图3A所示。The 3D model of the lower limbs before straightening is viewed from the positive angle of the monitor, and the 3D model is in a non-upright shape; in the image coordinate system, the 3D model is also in a non-upright shape, as shown in Figure 3A.
根据一些实施例,骨盆和股骨转正包括两种方法:通过左右两侧的髂前上棘进行转正和通过左右两侧髂前上棘及耻骨联合点进行转正。According to some embodiments, the righting of the pelvis and femur includes two methods: righting through the left and right anterior superior iliac spines and righting through the left and right anterior superior iliac spines and the pubic symphysis.
通过左右两侧的髂前上棘进行转正,即旋转三维模型,使得髂前上棘的连线平行于图像坐标系的横轴并且平行于冠状面。Correction is performed through the left and right anterior superior iliac spines, that is, the three-dimensional model is rotated so that the line connecting the anterior superior iliac spines is parallel to the horizontal axis of the image coordinate system and parallel to the coronal plane.
通过左右两侧髂前上棘及耻骨联合点进行转正,即旋转三维模型,使得髂前上棘的连线平行于图像坐标系的横轴,并且左右两侧髂前上棘与耻骨联合点构成的平面平行于冠状面。The left and right sides of the anterior superior iliac spine and the pubic symphysis point are corrected, that is, the three-dimensional model is rotated so that the connection line of the anterior superior iliac spine is parallel to the horizontal axis of the image coordinate system, and the left and right anterior superior iliac spine and the pubic symphysis point form The plane is parallel to the coronal plane.
转正后的下肢三维模型,在图像坐标系中处于正直的形态,如图3B所示。The 3D model of the lower limbs after straightening is in a straight shape in the image coordinate system, as shown in Figure 3B.
在S107,计算实际下肢长度。In S107, the actual lower limb length is calculated.
三维模型上方的水平直线为通过左右髂前上棘的连线的平行线,左侧为未进行假体置换术前规划的下肢,如图4A所示。The horizontal straight line above the three-dimensional model is a parallel line passing through the line connecting the left and right anterior superior iliac spines, and the left side is the lower limb that has not been planned before prosthetic replacement, as shown in Figure 4A.
根据一些实施例,围绕髋臼中心旋转股骨三维模型,使得股骨中心和股骨远端中心的连线形成的力线垂直于横断面,并且髋臼中心与力线所在的平面平行于冠状面。According to some embodiments, the three-dimensional model of the femur is rotated around the center of the acetabulum, so that the line of force formed by the line connecting the center of the femur and the center of the distal end of the femur is perpendicular to the transverse plane, and the plane between the center of the acetabulum and the line of force is parallel to the coronal plane.
根据一些实施例,髋臼中心可由股骨中心替代。According to some embodiments, the center of the acetabulum may be replaced by the center of the femur.
进一步地,通过已选取的小粗隆点,计算小粗隆点到左右髂前上棘所在横断面的平面的垂直距离,作为实际下肢长度。Further, through the selected trochanter point, calculate the vertical distance from the trochanter point to the plane of the cross-section where the left and right anterior superior iliac spines are located, as the actual lower limb length.
三维模型上方的水平直线为通过左右髂前上棘的连线的平行线,右侧为进行假体置换术前规划后的下肢,如图4A所示。The horizontal straight line above the three-dimensional model is a parallel line passing through the line connecting the left and right anterior superior iliac spines, and the right side is the lower limb after preoperative planning for prosthesis replacement, as shown in Figure 4A.
根据一些实施例,围绕规划后的髋臼中心旋转股骨三维模型,使得规划后的股骨中心和股骨远端中心的连线形成的规划后的力线垂直于横断面,并且规划后的髋臼中心与力线所在的平面平行于冠状面。According to some embodiments, the three-dimensional model of the femur is rotated around the planned acetabular center, so that the planned line of force formed by the line connecting the planned femoral center and the center of the distal end of the femur is perpendicular to the transverse plane, and the planned acetabular center The plane with the lines of force is parallel to the coronal plane.
规划后的髋臼中心和股骨中心位置与人体实际的髋臼中心和股骨中心位置不同,相应地,规划后的力线位置也相对于实际的力线位置发生改变。The planned positions of the acetabular center and the femoral center are different from the actual positions of the acetabular center and the femoral center of the human body. Correspondingly, the planned position of the line of force also changes relative to the position of the actual line of force.
根据一些实施例,规划后的髋臼中心可由规划后的股骨中心替代。According to some embodiments, the planned acetabular center may be replaced by the planned femoral center.
进一步地,通过已选取的小粗隆点,计算小粗隆点到左右髂前上棘所在横断面的平面的垂直距离,作为规划后的下肢长度。Further, through the selected trochanter point, the vertical distance from the trochanter point to the plane of the cross-section where the left and right anterior superior iliac spines are located is calculated as the planned lower limb length.
根据一些实施例,计算下肢长度时使用的横断面可采用任意高于小粗隆点所在横断面的平面。According to some embodiments, the cross-section used for calculating the length of the lower limb may adopt any plane higher than the cross-section where the lesser tuberosity point is located.
如图4B所显示的数据,即为经过假体置换术前规划的下肢长度及联合偏心距相对于未进行假体置换术前规划的实际下肢长度及联合偏心距的变化。The data shown in Fig. 4B is the change of the lower limb length and combined eccentricity planned before the prosthetic replacement compared to the actual lower limb length and combined eccentricity planned before the prosthetic replacement.
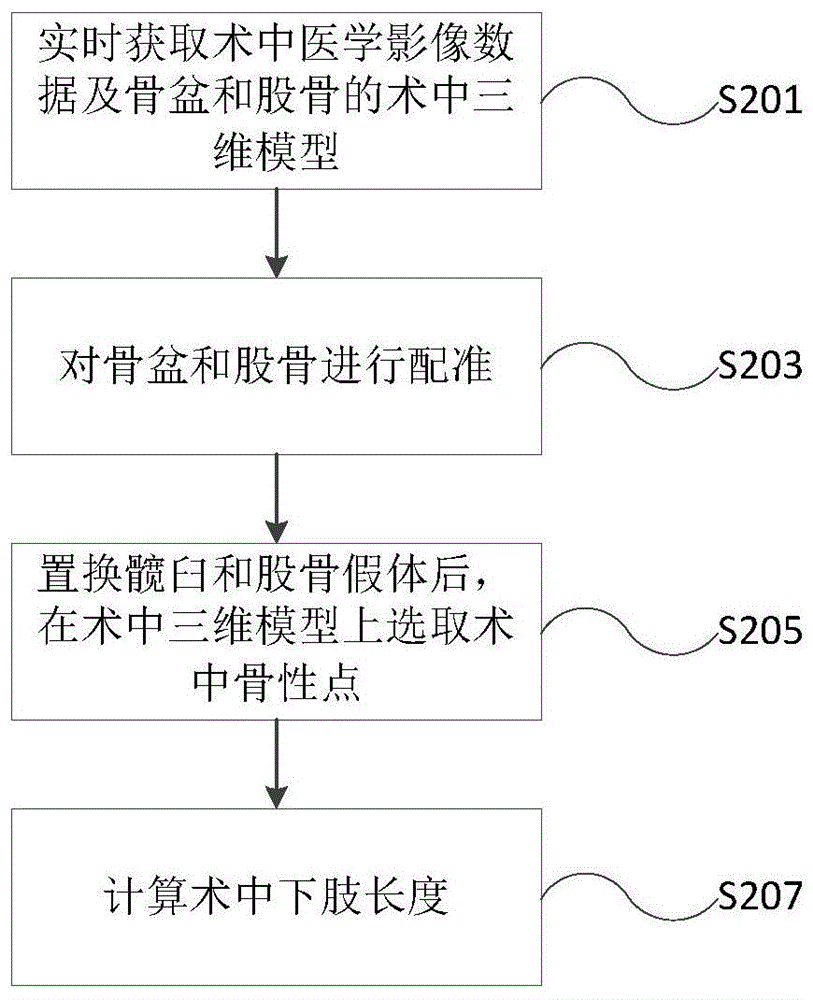
图5示出根据本申请示例实施例的手术上位机术中执行模式的流程图。Fig. 5 shows a flow chart of the intraoperative execution mode of the surgical host computer according to an exemplary embodiment of the present application.
如图5所示,在S201,实时获取患者的术中医学影像数据,并依据医学影像数据获取骨盆和股骨的术中三维模型。As shown in FIG. 5 , at S201 , the intraoperative medical image data of the patient are obtained in real time, and the intraoperative three-dimensional models of the pelvis and femur are obtained according to the medical image data.
一般地,医学影像数据包括CT和/或MRI。Generally, medical imaging data includes CT and/or MRI.
根据一些实施例,通过对医学影像进行分割获取骨盆和股骨的三维模型图像。According to some embodiments, the three-dimensional model images of the pelvis and the femur are obtained by segmenting the medical image.
在S203,分别对骨盆和股骨进行配准。In S203, registration is performed on the pelvis and the femur respectively.
首先对骨盆进行粗配准。Coarse registration is performed on the pelvis first.
根据一些实施例,在已获取的术前下肢医学图像上,选取多个骨盆粗配准图像配准点进行标注,如图6A所示,并获取骨盆粗配准图像配准点的图像坐标系坐标。According to some embodiments, on the obtained preoperative lower limb medical image, select a plurality of registration points of the coarse registration image of the pelvis for labeling, as shown in FIG. 6A , and obtain the image coordinate system coordinates of the registration points of the coarse registration image of the pelvis.
进一步地,在患者手术区域的骨面上选取对应的骨盆粗配准手术配准点进行标注,并获取骨盆粗配准手术配准点的相机坐标系坐标。Further, the corresponding pelvic coarse registration surgical registration points are selected on the bone surface of the patient's surgical region for marking, and the camera coordinate system coordinates of the pelvic coarse registration surgical registration points are obtained.
基于骨盆粗配准图像配准点的图像坐标系坐标和对应的骨盆粗配准手术配准点的相机坐标系坐标,计算并获取本申请实施例的图像坐标系与相机坐标系转换的骨盆粗配准矩阵。Based on the image coordinate system coordinates of the pelvic coarse registration image registration point and the corresponding camera coordinate system coordinates of the pelvic coarse registration surgical registration point, calculate and obtain the pelvis coarse registration converted from the image coordinate system and the camera coordinate system in the embodiment of the present application matrix.
根据一些实施例,骨盆粗配准矩阵通过刚性配准算法计算并获取。According to some embodiments, the coarse registration matrix of the pelvis is calculated and obtained by a rigid registration algorithm.
对骨盆进行粗配准后继续进行精配准。After the rough registration of the pelvis, the fine registration is continued.
根据一些实施例,在患者手术区域的骨面上另外选取不同于骨盆粗配准手术配准点的多个(20-50个)骨盆精配准手术配准点进行标注,并获取骨盆精配准手术配准点的相机坐标系坐标。According to some embodiments, multiple (20-50) pelvic fine registration surgical registration points different from the pelvic coarse registration surgical registration points are additionally selected on the bone surface of the patient's surgical region for labeling, and the pelvic fine registration surgical registration points are obtained. The camera frame coordinates of the registration points.
进一步地,通过骨盆粗配准矩阵将骨盆精配准手术配准点的相机坐标系坐标转换为图像坐标系坐标,并因此在医学图像上获得对应的骨盆精配准图像配准点,如图6B所示。Further, the camera coordinate system coordinates of the pelvic fine registration operation registration points are converted into image coordinate system coordinates through the pelvic coarse registration matrix, and thus the corresponding pelvic fine registration image registration points are obtained on the medical image, as shown in Figure 6B Show.
基于骨盆精配准图像配准点的图像坐标系坐标和骨盆精配准手术配准点的相机坐标系坐标,计算并获取本申请实施例的图像坐标系与相机坐标系转换的骨盆精配准矩阵。Based on the image coordinate system coordinates of the pelvis fine registration image registration points and the camera coordinate system coordinates of the pelvic fine registration surgical registration points, calculate and obtain the pelvis fine registration matrix converted from the image coordinate system and the camera coordinate system in the embodiment of the present application.
根据一些实施例,骨盆精配准矩阵通过最近迭代算法计算并获取,计算精确度相对于骨盆粗配准矩阵更高。According to some embodiments, the fine registration matrix of the pelvis is calculated and acquired through the nearest iteration algorithm, and the calculation accuracy is higher than that of the coarse registration matrix of the pelvis.
同样地,继续进行对股骨进行粗配准。Likewise, proceed with coarse registration of the femur.
根据一些实施例,在已获取的术前下肢医学图像上,选取多个股骨粗配准图像配准点进行标注,如图7A所示,并获取股骨粗配准图像配准点的图像坐标系坐标。According to some embodiments, on the obtained preoperative lower limb medical image, a plurality of registration points of the coarse femur registration image are selected for labeling, as shown in FIG. 7A , and image coordinate system coordinates of the registration points of the coarse registration image of the femur are obtained.
进一步地,在患者手术区域的骨面上选取对应的股骨粗配准手术配准点进行标注,并获取股骨粗配准手术配准点的相机坐标系坐标。Further, the corresponding coarse femoral registration surgical registration points are selected on the bone surface of the patient's surgical region for marking, and the camera coordinate system coordinates of the femoral coarse registration surgical registration points are obtained.
基于股骨粗配准图像配准点的图像坐标系坐标和对应的股骨粗配准手术配准点的相机坐标系坐标,计算并获取本申请实施例的图像坐标系与相机坐标系转换的股骨粗配准矩阵。Based on the image coordinate system coordinates of the coarse femoral registration image registration points and the corresponding camera coordinate system coordinates of the femoral coarse registration surgical registration points, calculate and obtain the femoral coarse registration converted from the image coordinate system and the camera coordinate system in the embodiment of the present application matrix.
根据一些实施例,股骨粗配准矩阵通过刚性配准算法计算并获取。According to some embodiments, the coarse registration matrix of the femur is calculated and obtained by a rigid registration algorithm.
对股骨进行粗配准后继续进行精配准。After the coarse registration of the femur, the fine registration is continued.
根据一些实施例,在患者手术区域的骨面上另外选取不同于股骨粗配准手术配准点的多个(20-50个)股骨精配准手术配准点进行标注,并获取股骨精配准手术配准点的相机坐标系坐标。According to some embodiments, multiple (20-50) femoral fine registration surgical registration points different from the femoral coarse registration surgical registration points are selected on the bone surface of the patient's surgical region for labeling, and the fine femoral registration surgical registration points are obtained. The camera frame coordinates of the registration points.
进一步地,通过股骨粗配准矩阵将股骨精配准手术配准点的相机坐标系坐标转换为图像坐标系坐标,并因此在医学图像上获得对应的股骨精配准图像配准点,如图7B所示。Further, the camera coordinate system coordinates of the fine femoral registration surgical registration points are transformed into image coordinate system coordinates through the coarse femoral registration matrix, and thus the corresponding femoral fine registration image registration points are obtained on the medical image, as shown in Figure 7B Show.
基于股骨精配准图像配准点的图像坐标系坐标和股骨精配准手术配准点的相机坐标系坐标,计算并获取本申请实施例的图像坐标系与相机坐标系转换的股骨精配准矩阵。Based on the image coordinate system coordinates of the femoral fine registration image registration point and the camera coordinate system coordinates of the femoral fine registration operation registration point, calculate and obtain the femoral fine registration matrix converted from the image coordinate system and the camera coordinate system in the embodiment of the present application.
根据一些实施例,股骨精配准矩阵通过最近迭代算法计算并获取,计算精确度相对于股骨粗配准矩阵更高。According to some embodiments, the fine registration matrix of the femur is calculated and acquired through the nearest iteration algorithm, and the calculation accuracy is higher than that of the coarse registration matrix of the femur.
根据一些实施例,骨盆配准和股骨配准的顺序不唯一。According to some embodiments, the order of pelvic registration and femoral registration is not unique.
在S205,置换髋臼和股骨假体后,在术中三维模型上选取骨盆和股骨上的多个术中骨性点。At S205, after the replacement of the acetabular and femoral prostheses, multiple intraoperative bony points on the pelvis and femur are selected on the intraoperative three-dimensional model.
根据一些实施例,按术前规划选择相应的髋臼和股骨的假体进行置换。According to some embodiments, corresponding acetabular and femoral prostheses are selected for replacement according to preoperative planning.
根据一些实施例,用户通过显示器显示的人机交互界面,在术中三维模型上选取术中骨性点。According to some embodiments, the user selects intraoperative bony points on the intraoperative three-dimensional model through the human-computer interaction interface displayed on the display.
例如,术中三维模型上的多个术中骨性点包括术中旋转中心(进行假体置换后的术中髋臼中心或术中股骨中心)、股骨远端中心、小粗隆和髂前上棘(左右两侧)。For example, multiple intraoperative bony points on the intraoperative 3D model include intraoperative center of rotation (intraoperative acetabular center or intraoperative femoral center after prosthetic replacement), distal femoral center, lesser trochanter, and anterior iliac Upper spines (left and right sides).
在S207,计算术中下肢长度。In S207, the intraoperative lower limb length is calculated.
根据一些实施例,在骨盆和股骨假体置换后的髋臼中心和股骨中心位置与人体实际的髋臼中心和股骨中心位置不同,相应地,假体置换后的力线与实际的力线相比也随之发生改变。According to some embodiments, the position of the acetabular center and the femur center after the replacement of the pelvis and the femoral prosthesis is different from the actual acetabular center and the position of the femur center of the human body. The ratio also changed accordingly.
首先,获取假体置换后的髋臼中心(术中髋臼中心)的相机坐标系坐标,通过骨盆精配准矩阵转换为图像坐标系坐标。First, the camera coordinate system coordinates of the acetabular center (intraoperative acetabular center) after prosthesis replacement are obtained, and converted into image coordinate system coordinates through the pelvic fine registration matrix.
根据一些实施例,先获取患者进行假体置换手术后的髋臼杯位置,通过骨盆精配准矩阵,获取臼杯在图像上的位置,再根据选择的臼杯内衬和球头型号,可以确定术中旋转中心(术中髋臼中心或术中股骨中心)的位置。According to some embodiments, the position of the acetabular cup after the prosthesis replacement operation of the patient is obtained first, and the position of the acetabular cup on the image is obtained through the fine registration matrix of the pelvis, and then according to the selected acetabular cup liner and ball head model, the Determine the location of the intraoperative center of rotation (intraoperative acetabular center or intraoperative femoral center).
其次,在股骨假体置换后,实时获取股骨在相机坐标系的位置和方向,通过股骨精配准矩阵转换为图像坐标系坐标。Secondly, after femoral prosthesis replacement, the position and orientation of the femur in the camera coordinate system are obtained in real time, and converted into image coordinate system coordinates through the femoral fine registration matrix.
进而,围绕术中旋转中心旋转术中三维模型,使得术中股骨中心与股骨远端中心的连线形成的力线垂直于横断面,并且术中旋转中心和力线构成的平面平行于冠状面。Furthermore, the intraoperative three-dimensional model was rotated around the intraoperative rotation center, so that the line of force formed by the line connecting the center of the femur and the center of the distal end of the femur was perpendicular to the transverse plane, and the plane formed by the center of rotation and the line of force was parallel to the coronal plane .
进一步地,通过已选取的小粗隆点,计算小粗隆点到左右髂前上棘所在横断面的平面的垂直距离,作为假体置换后的术中下肢长度。Further, through the selected trochanter point, calculate the vertical distance from the trochanter point to the plane of the cross-section where the left and right anterior superior iliac spines are located, and use it as the length of the lower limb during the operation after prosthesis replacement.
最后,根据实际下肢长度和术中下肢长度可获取手术侧的下肢长度与手术前下肢长度的变化。Finally, according to the actual lower limb length and the lower limb length during operation, the change of the lower limb length on the operated side and the lower limb length before operation can be obtained.
如图8所示,左侧为未进行假体置换的下肢,右侧为已进行假体置换后的下肢。As shown in Figure 8, the left side is the lower limb without prosthesis replacement, and the right side is the lower limb after prosthesis replacement.
左侧下方线段(左端点为小粗隆点)的右端点与右侧下方线段(右端点为小粗隆点)的左端点在图像中线上形成的位移差,即为术中下肢长度与实际下肢长度的差值。The displacement difference between the right end point of the left lower line segment (the left end point is the trochanter point) and the left end point of the right lower line segment (the right end point is the small trochanter point) on the center line of the image is the difference between the length of the lower limb during operation and the actual Difference in lower extremity length.
手术上位机显示器可实时显示实际下肢长度、术中下肢长度、手术侧下肢长度对比手术前下肢长度的变化差值以及手术侧下肢长度对比对侧下肢长度的差值,用户可根据数据对假体进行相应地调整,避免出现下肢不等长的情况。The monitor of the surgical host computer can display in real time the actual length of the lower limb, the length of the lower limb during the operation, the difference between the length of the lower limb on the operated side and the length of the lower limb before the operation, and the difference between the length of the lower limb on the operated side and the length of the contralateral lower limb. Users can adjust the prosthesis according to the data. Adjust accordingly to avoid unequal lengths of the lower limbs.
图9示出根据本申请示例实施例的手术上位机的框图。Fig. 9 shows a block diagram of a surgical host computer according to an exemplary embodiment of the present application.
如图9所示,电子设备600仅仅是一个示例,不应对本申请实施例的功能和使用范围带来任何限制。As shown in FIG. 9 , the
如图9所示,电子设备600以通用计算设备的形式表现。电子设备600的组件可以包括但不限于:至少一个处理单元610、至少一个存储单元620、连接不同系统组件(包括存储单元620和处理单元610)的总线630、显示单元640等。其中,存储单元存储有程序代码,程序代码可以被处理单元610执行,使得处理单元610执行本说明书描述的根据本申请各种示例性实施方式的方法。As shown in FIG. 9,
例如,处理单元610可以执行如图5中所示的方法。For example, the
首先,根据实时的术中下肢医学图像获取骨盆和股骨的术中三维模型。First, intraoperative 3D models of the pelvis and femur were obtained from real-time intraoperative lower extremity medical images.
而后根据用户选取的图像配准点和手术配准点,分别对骨盆和股骨进行粗配准和精配准。Then, according to the image registration points and surgical registration points selected by the user, coarse registration and fine registration are performed on the pelvis and femur respectively.
在用户置换髋臼和股骨假体后,再根据用户选取的多个术中骨性点,在术中下肢医学图像上进行显示。After the user replaces the acetabular and femoral prosthesis, it will be displayed on the intraoperative lower limb medical image according to the multiple intraoperative bony points selected by the user.
根据用户的操作,旋转术中三维模型至相应位置,基于术中骨性点的位置计算术中下肢长度。According to the user's operation, the intraoperative three-dimensional model is rotated to the corresponding position, and the intraoperative lower limb length is calculated based on the position of the intraoperative bony point.
存储单元620可以包括易失性存储单元形式的可读介质,例如随机存取存储单元(RAM)6201和/或高速缓存存储单元6202,还可以进一步包括只读存储单元(ROM)6203。The
存储单元620还可以包括具有一组(至少一个)程序模块6205的程序/实用工具6204,这样的程序模块6205包括但不限于:操作系统、一个或者多个应用程序、其它程序模块以及程序数据,这些示例中的每一个或某种组合中可能包括网络环境的实现。
例如,存储单元620可存储处理单元610执行术中执行模式时的第一程序。For example, the
总线630可以为表示几类总线结构中的一种或多种,包括存储单元总线或者存储单元控制器、外围总线、图形加速端口、处理单元或者使用多种总线结构中的任意总线结构的局域总线。
电子设备600也可以与一个或多个外部设备700(例如键盘、指向设备、蓝牙设备等)通信,还可与一个或者多个使得用户能与该电子设备600交互的设备通信,和/或与使得该电子设备600能与一个或多个其它计算设备进行通信的任何设备(例如路由器、调制解调器等等)通信。这种通信可以通过输入/输出(I/O)接口650进行。并且,电子设备600还可以通过网络适配器660与一个或者多个网络(例如局域网(LAN),广域网(WAN)和/或公共网络,例如因特网)通信。网络适配器660可以通过总线630与电子设备600的其它模块通信。应当明白,尽管图中未示出,可以结合电子设备600使用其它硬件和/或软件模块,包括但不限于:微代码、设备驱动器、冗余处理单元、外部磁盘驱动阵列、RAID系统、磁带驱动器以及数据备份存储系统等。The
通过以上的实施方式的描述,本领域的技术人员易于理解,这里描述的示例实施例可以通过软件实现,也可以通过软件结合必要的硬件的方式来实现。根据本申请实施例的技术方案可以以软件产品的形式体现出来,该软件产品可以存储在一个非易失性存储介质(可以是CD-ROM,U盘,移动硬盘等)中或网络上,包括若干指令以使得一台计算设备(可以是个人计算机、服务器、移动终端或者网络设备等)执行根据本申请实施例的方法。Through the above description of the implementation manners, those skilled in the art can easily understand that the exemplary embodiments described here can be implemented by software, or by combining software with necessary hardware. The technical solutions according to the embodiments of the present application can be embodied in the form of software products, which can be stored in a non-volatile storage medium (which can be CD-ROM, U disk, mobile hard disk, etc.) or on the network, including Several instructions enable a computing device (which may be a personal computer, server, mobile terminal or network device, etc.) to execute the method according to the embodiment of the present application.
软件产品可以采用一个或多个可读介质的任意组合。可读介质可以是可读信号介质或者可读存储介质。可读存储介质例如可以为但不限于电、磁、光、电磁、红外线、或半导体的系统、装置或器件,或者任意以上的组合。可读存储介质的更具体的例子(非穷举的列表)包括:具有一个或多个导线的电连接、便携式盘、硬盘、随机存取存储器(RAM)、只读存储器(ROM)、可擦式可编程只读存储器(EPROM或闪存)、光纤、便携式紧凑盘只读存储器(CD-ROM)、光存储器件、磁存储器件、或者上述的任意合适的组合。A software product may utilize any combination of one or more readable media. The readable medium may be a readable signal medium or a readable storage medium. The readable storage medium may be, for example, but not limited to, an electrical, magnetic, optical, electromagnetic, infrared, or semiconductor system, device, or device, or any combination thereof. More specific examples (non-exhaustive list) of readable storage media include: electrical connection with one or more conductors, portable disk, hard disk, random access memory (RAM), read only memory (ROM), erasable programmable read-only memory (EPROM or flash memory), optical fiber, portable compact disk read-only memory (CD-ROM), optical storage devices, magnetic storage devices, or any suitable combination of the foregoing.
计算机可读存储介质可以包括在基带中或者作为载波一部分传播的数据信号,其中承载了可读程序代码。这种传播的数据信号可以采用多种形式,包括但不限于电磁信号、光信号或上述的任意合适的组合。可读存储介质还可以是可读存储介质以外的任何可读介质,该可读介质可以发送、传播或者传输用于由指令执行系统、装置或者器件使用或者与其结合使用的程序。可读存储介质上包含的程序代码可以用任何适当的介质传输,包括但不限于无线、有线、光缆、RF等等,或者上述的任意合适的组合。A computer readable storage medium may include a data signal carrying readable program code in baseband or as part of a carrier wave traveling as part of a data signal. Such propagated data signals may take many forms, including but not limited to electromagnetic signals, optical signals, or any suitable combination of the foregoing. A readable storage medium may also be any readable medium other than a readable storage medium that can send, propagate or transport a program for use by or in conjunction with an instruction execution system, apparatus or device. The program code contained on the readable storage medium may be transmitted by any suitable medium, including but not limited to wireless, cable, optical cable, RF, etc., or any suitable combination of the above.
可以以一种或多种程序设计语言的任意组合来编写用于执行本申请操作的程序代码,程序设计语言包括面向对象的程序设计语言—诸如Java、C++等,还包括常规的过程式程序设计语言—诸如“C”语言或类似的程序设计语言。程序代码可以完全地在用户计算设备上执行、部分地在用户设备上执行、作为一个独立的软件包执行、部分在用户计算设备上部分在远程计算设备上执行、或者完全在远程计算设备或服务器上执行。在涉及远程计算设备的情形中,远程计算设备可以通过任意种类的网络,包括局域网(LAN)或广域网(WAN),连接到用户计算设备,或者,可以连接到外部计算设备(例如利用因特网服务提供商来通过因特网连接)。Program codes for performing the operations of the present application can be written in any combination of one or more programming languages, including object-oriented programming languages—such as Java, C++, etc., as well as conventional procedural programming Language - such as "C" or similar programming language. The program code may execute entirely on the user's computing device, partly on the user's device, as a stand-alone software package, partly on the user's computing device and partly on a remote computing device, or entirely on the remote computing device or server to execute. In cases involving a remote computing device, the remote computing device may be connected to the user computing device through any kind of network, including a local area network (LAN) or a wide area network (WAN), or may be connected to an external computing device (for example, using an Internet service provider). business to connect via the Internet).
上述计算机可读介质承载有一个或者多个程序,当上述一个或者多个程序被一个该设备执行时,使得该计算机可读介质实现前述功能。The above-mentioned computer-readable medium carries one or more programs, and when the above-mentioned one or more programs are executed by one device, the computer-readable medium can realize the aforementioned functions.
本领域技术人员可以理解上述各模块可以按照实施例的描述分布于装置中,也可以进行相应变化唯一不同于本实施例的一个或多个装置中。上述实施例的模块可以合并为一个模块,也可以进一步拆分成多个子模块。Those skilled in the art can understand that the above-mentioned modules can be distributed in the device according to the description of the embodiment, and corresponding changes can also be made in one or more devices that are only different from the embodiment. The modules in the above embodiments can be combined into one module, and can also be further split into multiple sub-modules.
根据本申请的一些实施例,本申请的技术方案需要对髋关节和股骨均进行配准,不使用额外工具,可精确测量手术侧下肢长度与手术前下肢长度、对侧下肢长度的变化并实时获取测量数据,预防下肢不等长现象。According to some embodiments of the present application, the technical solution of the present application requires both the hip joint and the femur to be registered, and without using additional tools, it is possible to accurately measure the changes in the length of the lower limb on the operated side, the length of the lower limb before the operation, and the length of the contralateral lower limb in real time. Obtain measurement data and prevent the phenomenon of lower limb length inequality.
以上对本申请实施例进行了详细介绍,以上实施例的说明仅用于帮助理解本申请的方法及其核心思想。同时,本领域技术人员依据本申请的思想,基于本申请的具体实施方式及应用范围上做出的改变或变形之处,都属于本申请保护的范围。综上所述,本说明书内容不应理解为对本申请的限制。The above describes the embodiments of the present application in detail, and the descriptions of the above embodiments are only used to help understand the method and the core idea of the present application. At the same time, changes or deformations made by those skilled in the art based on the ideas of the application, specific implementation methods and application scopes of the application all belong to the scope of protection of the application. To sum up, the contents of this specification should not be understood as limiting the application.
Claims (14)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111625035.0A CN116350407A (en) | 2021-12-28 | 2021-12-28 | Surgical host computer and surgical system for measuring the length of lower limbs in hip replacement |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111625035.0A CN116350407A (en) | 2021-12-28 | 2021-12-28 | Surgical host computer and surgical system for measuring the length of lower limbs in hip replacement |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN116350407A true CN116350407A (en) | 2023-06-30 |
Family
ID=86925514
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202111625035.0A Pending CN116350407A (en) | 2021-12-28 | 2021-12-28 | Surgical host computer and surgical system for measuring the length of lower limbs in hip replacement |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN116350407A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116269952A (en) * | 2021-12-20 | 2023-06-23 | 北京天智航医疗科技股份有限公司 | Surgical upper computer and surgical system for measuring length of lower limb of hip joint replacement |
| CN118557176A (en) * | 2024-05-30 | 2024-08-30 | 安徽派睿太赫兹医疗器械技术开发有限公司 | A method and system for measuring the difference in length of lower limbs during hip replacement surgery |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20070209220A1 (en) * | 2006-02-10 | 2007-09-13 | Murphy Stephen B | System and method for facilitating hip surgery |
| CN101125085A (en) * | 2007-09-21 | 2008-02-20 | 绍兴市人民医院 | Lower Limb Isometric Measurement Device for Total Hip Arthroplasty |
| US20140135658A1 (en) * | 2008-12-02 | 2014-05-15 | Avenir Medical Inc. | Method And System For Aligning A Prosthesis During Surgery Using Active Sensors |
| US20180199995A1 (en) * | 2015-07-13 | 2018-07-19 | Mako Surgical Corp. | Lower extremities leg length calculation method |
| CN113116523A (en) * | 2021-04-09 | 2021-07-16 | 元化智能科技(深圳)有限公司 | Orthopedic surgery registration device, terminal equipment and storage medium |
-
2021
- 2021-12-28 CN CN202111625035.0A patent/CN116350407A/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20070209220A1 (en) * | 2006-02-10 | 2007-09-13 | Murphy Stephen B | System and method for facilitating hip surgery |
| CN101125085A (en) * | 2007-09-21 | 2008-02-20 | 绍兴市人民医院 | Lower Limb Isometric Measurement Device for Total Hip Arthroplasty |
| US20140135658A1 (en) * | 2008-12-02 | 2014-05-15 | Avenir Medical Inc. | Method And System For Aligning A Prosthesis During Surgery Using Active Sensors |
| US20180199995A1 (en) * | 2015-07-13 | 2018-07-19 | Mako Surgical Corp. | Lower extremities leg length calculation method |
| CN113116523A (en) * | 2021-04-09 | 2021-07-16 | 元化智能科技(深圳)有限公司 | Orthopedic surgery registration device, terminal equipment and storage medium |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116269952A (en) * | 2021-12-20 | 2023-06-23 | 北京天智航医疗科技股份有限公司 | Surgical upper computer and surgical system for measuring length of lower limb of hip joint replacement |
| CN118557176A (en) * | 2024-05-30 | 2024-08-30 | 安徽派睿太赫兹医疗器械技术开发有限公司 | A method and system for measuring the difference in length of lower limbs during hip replacement surgery |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112641511B (en) | Joint replacement surgery navigation system and method | |
| JP7203148B2 (en) | Systems and methods for intraoperative image analysis | |
| US20230277088A1 (en) | Systems and methods for measurement of anatomic alignment | |
| CN102784003B (en) | Pediculus arcus vertebrae internal fixation operation navigation system based on structured light scanning | |
| CN111249002B (en) | Intraoperative planning and adjustment method, device and equipment for total knee arthroplasty | |
| US20170065430A1 (en) | Prosthetic placement tool and associated methods | |
| Paprosky et al. | Intellijoint HIP®: a 3D mini-optical navigation tool for improving intraoperative accuracy during total hip arthroplasty | |
| CN106691600A (en) | Spine pedicle screw implanting and locating device | |
| CN105361883A (en) | Method for determining lower limb biological force line in three-dimensional space for total knee arthroplasty | |
| US20080132783A1 (en) | Pelvis Registration Method and Apparatus | |
| US7776055B2 (en) | System and method for tracking progress of insertion of a rod in a bone | |
| CN110264504A (en) | A kind of three-dimensional registration method and system for augmented reality | |
| CN106420054A (en) | Anterior cruciate ligament stopping location and ligament tunnel location device combining with preoperative 3D planning information | |
| US20220354590A1 (en) | Method for registering articulated anatomical structures | |
| JP2023526458A (en) | Intraoperative Imaging and Virtual Modeling Methods, Systems, and Tools for Fracture Reduction | |
| US20170245942A1 (en) | System and Method For Precision Position Detection and Reproduction During Surgery | |
| CN115005987A (en) | Method and system for pelvis registration in hip revision surgery | |
| CN119856980B (en) | Navigation method, device and system for orthopedic surgery, electronic equipment and storage medium | |
| CN116350407A (en) | Surgical host computer and surgical system for measuring the length of lower limbs in hip replacement | |
| US10149724B2 (en) | Accurate radiographic calibration using multiple images | |
| US10004564B1 (en) | Accurate radiographic calibration using multiple images | |
| CN116269952A (en) | Surgical upper computer and surgical system for measuring length of lower limb of hip joint replacement | |
| CN108451656B (en) | Spine three-dimensional positioning method | |
| CN110811829B (en) | A method and system for constructing an analytical model based on femoral rotation axis and varus axis | |
| CN115645050B (en) | Surgical navigation system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |