CN115951077A - A fully automatic detection system and method for alloy composition - Google Patents
A fully automatic detection system and method for alloy composition Download PDFInfo
- Publication number
- CN115951077A CN115951077A CN202310134660.8A CN202310134660A CN115951077A CN 115951077 A CN115951077 A CN 115951077A CN 202310134660 A CN202310134660 A CN 202310134660A CN 115951077 A CN115951077 A CN 115951077A
- Authority
- CN
- China
- Prior art keywords
- sample
- robot
- titration
- heating
- automatic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P10/00—Technologies related to metal processing
- Y02P10/25—Process efficiency
Landscapes
- Automatic Analysis And Handling Materials Therefor (AREA)
Abstract
Description
技术领域technical field
本发明涉及合金成分检测领域,尤其涉及一种合金成分全自动检测系统和方法。The invention relates to the field of alloy composition detection, in particular to an alloy composition automatic detection system and method.
背景技术Background technique
传统的合金成分检测方法主要是以人工方式进行的。测试步骤依次包括样品的称量、样品前处理(试样烧杯的冲洗、加溶样酸,通保护气(氮气)、排放空气)、样品的加热、冷却,再到滴定过程(溶液的称量、配制、混和、滴定、观察)、分析、记录,最后到废液的排放、样品杯的清洗、滴定装置的清洁等。这一系列繁复的工作均通过手工操作来完成。即便对于少量的样品实验,这样的工作量也要占用一名熟练的化学实验人员不少的时间和精力。而且,由于完全是依靠手工操作,人为影响因素就很大,化学反应的程度、溶液的配制、滴定结果的观察与分析完全凭借个人的经验来判断,所以极容易出现人为误差。如果出现人员更替的情况,判断结果就有可能出现很大出入。The traditional detection method of alloy composition is mainly carried out manually. The test steps include the weighing of the sample, sample pretreatment (rinsing of the sample beaker, adding dissolved sample acid, passing protective gas (nitrogen), exhausting air), heating and cooling of the sample, and then to the titration process (weighing of the solution , preparation, mixing, titration, observation), analysis, recording, and finally discharge of waste liquid, cleaning of sample cup, cleaning of titration device, etc. This series of complicated work is all done by manual operation. Even for a small number of sample experiments, such a workload will take up a lot of time and energy of a skilled chemical experimenter. Moreover, since it relies entirely on manual operation, human factors are very large, and the degree of chemical reaction, solution preparation, and observation and analysis of titration results are all judged by personal experience, so human errors are extremely prone to occur. If there is a turnover of personnel, the judgment results may vary greatly.
对于大型钢铁企业,这种化学分析的工作量每天都会很大。通过人工测试,不但花费大量的人力和时间,降低了工作效率,更重要的是缺乏数据采集和分析的准确性和可靠性。大量的化学分析,一旦出现人为失误,将对于接下来的制造分析和原材料选择产生直接的影响。此外,试样和酸性试剂反应时会对人体产生一定的影响,危害人体健康。For large iron and steel enterprises, the workload of this kind of chemical analysis will be huge every day. Manual testing not only consumes a lot of manpower and time, reduces work efficiency, but more importantly, lacks the accuracy and reliability of data collection and analysis. A large amount of chemical analysis, once human error occurs, will have a direct impact on the subsequent manufacturing analysis and raw material selection. In addition, when the sample reacts with the acid reagent, it will have a certain impact on the human body and endanger human health.
因此,本发明要解决的技术问题是传统人工手动成分检测方法的低效率、准确性差以及对从业人员的健康损害。Therefore, the technical problem to be solved by the present invention is the low efficiency, poor accuracy and health damage to practitioners of traditional manual component detection methods.
针对这一系列缺点,本领域的技术人员致力于开发一种合金成分全自动检测系统和方法,可以用智能全自动化学试验系统来代替传统的手工检测试验分析方法,成倍提高样品处理和试验分析的工作效率,最大限度避免了人为误差的出现,大大提高了化学反应的完全性和数据采集分析的准确性与可靠性。同时,也减少了对人体健康的损害。In view of this series of shortcomings, those skilled in the art are committed to developing a fully automatic detection system and method for alloy composition, which can replace the traditional manual detection and analysis method with an intelligent automatic chemical test system, and double the sample processing and test results. The efficiency of the analysis minimizes the occurrence of human errors, greatly improving the completeness of chemical reactions and the accuracy and reliability of data collection and analysis. At the same time, the damage to human health is also reduced.
发明内容Contents of the invention
有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是传统手工成分检测方法带来的效率低、人力成本高、准确性和可靠性差以及危害人体健康的问题。In view of the above-mentioned defects of the prior art, the technical problem to be solved by the present invention is the problems of low efficiency, high labor cost, poor accuracy and reliability, and harm to human health caused by traditional manual component detection methods.
为实现上述目的,本发明提供了一种合金成分全自动检测系统,包括自动称样系统、加热搅拌系统、滴定系统、清洗系统、机器人系统和控制系统,其中,所述自动称样系统的作用是:称量并加入指定重量的金属粉末样品,输出称量重量信息以及称量的样品;所述加热搅拌系统的作用是:安装升降盖子、通气、加酸液、加热、通气冷却,使金属粉末样品在指定的条件下充分化学反应,得到待测样品溶液;所述滴定系统的作用是:通过电位滴定法确定经过所述加热搅拌系统后的待测样品溶液中的某种金属成分含量;所述清洗系统的作用是:实现废液处理和滴定后样品杯的自动清洗烘干;由所述机器人系统完成金属样品在所述自动称样系统、加热搅拌系统、滴定系统和清洗系统中的转移,由所述控制系统完成对所述自动称样系统、加热搅拌系统、滴定系统、清洗系统和机器人系统的通讯以及指令控制,完成对金属样品的成分含量的测定。In order to achieve the above object, the present invention provides a fully automatic detection system for alloy components, including an automatic weighing system, a heating and stirring system, a titration system, a cleaning system, a robot system and a control system, wherein the function of the automatic weighing system is Yes: Weigh and add a metal powder sample with a specified weight, output the weighing information and the weighed sample; the function of the heating and stirring system is: install the lifting cover, ventilate, add acid, heat, ventilate and cool, and make the metal The powder sample is fully chemically reacted under specified conditions to obtain the sample solution to be tested; the function of the titration system is to determine the content of a certain metal component in the sample solution to be tested after passing through the heating and stirring system by potentiometric titration; The function of the cleaning system is to realize waste liquid treatment and automatic cleaning and drying of the sample cup after titration; the robot system completes the metal sample in the automatic weighing system, heating and stirring system, titration system and cleaning system. Transfer, the control system completes the communication and command control of the automatic weighing system, heating and stirring system, titration system, cleaning system and robot system, and completes the determination of the component content of the metal sample.
进一步地,所述自动称样系统包括加样头、加样头支架、样品杯、加样称量仪器、样品桌;人工将所述金属粉末样品加入到加样头中,并贴上条码,扫描所述条码得到信息存入上位机后,将所述金属粉末样品放置于取样区;人工触发自动工作启动模式,所述机器人系统取所述加样头并放置于所述加样称量仪器的加样处,所述自动称样系统锁定所述加样头,同时所述加样称量仪器读取所述加样头信息,和扫描条码信息进行比对,准确无误后存入所述上位机;当接收到PLC的正确信号后,所述机器人系统取样品杯放至工作台上;接收到光电开关的到位信号后,所述加样称量仪器控制所述加样头工作,将设定重量的样本加入到所述样品杯中。Further, the automatic weighing system includes a sampling head, a sampling head bracket, a sample cup, a sampling weighing instrument, and a sample table; manually add the metal powder sample into the sampling head, and paste a barcode, After scanning the barcode to obtain the information and storing it in the host computer, place the metal powder sample in the sampling area; manually trigger the automatic work start mode, and the robot system takes the sampling head and places it in the sampling weighing instrument At the sampling place, the automatic weighing system locks the sampling head, and at the same time, the sampling weighing instrument reads the information of the sampling head, compares it with the scanned barcode information, and stores it in the Host computer; after receiving the correct signal from the PLC, the robot system takes the sample cup and puts it on the workbench; after receiving the in-position signal of the photoelectric switch, the sample adding weighing instrument controls the work of the sample adding head, A set weight of sample is added to the sample cup.
进一步地,所述加样称量仪器具备自动开关的舱门,在所述机器人系统取所述加样头前,所述加样称量仪器自动开门,在所述加样称量仪器加样结束后自动开门。Further, the adding and weighing instrument is provided with an automatic switch hatch, before the robot system takes the sample adding head, the adding and weighing instrument automatically opens the door, and the sample adding and weighing instrument adds a sample Automatically open the door when finished.
进一步地,所述加热搅拌系统包括加热搅拌器、升降抓盖气缸、自动加液系统、自动通气系统和气动系统;所述机器人系统将盛有金属粉末样品的样品杯送入所述加热搅拌系统,并具体地放置在所述加热搅拌器上;所述升降抓盖气缸将升降盖子固定在所述样品杯上,所述升降盖子压紧后,所述自动通气系统先通入氮气排出空气,所述自动加液系统再打开蠕动泵加入指定体积的水和酸液,然后开启所述加热搅拌器的加热功能,加热至指定时间后停止加热,直至蒸干;并由所述自动通气系统通入氮气加快样品杯中溶液冷却,并排出所述样品杯中酸雾,之后所述升降抓盖气缸松开所述升降盖子,得到待测样品溶液。Further, the heating and stirring system includes a heating stirrer, a lifting and grabbing cylinder, an automatic liquid addition system, an automatic ventilation system and a pneumatic system; the robot system sends the sample cup containing the metal powder sample into the heating and stirring system , and specifically placed on the heating stirrer; the lifting cover cylinder fixes the lifting cover on the sample cup, after the lifting cover is pressed, the automatic ventilating system first feeds nitrogen to discharge the air, The automatic liquid addition system turns on the peristaltic pump to add water and acid solution of a specified volume, then turns on the heating function of the heating agitator, stops heating after heating for a specified time, until evaporated; and is ventilated by the automatic ventilation system Nitrogen gas is added to speed up the cooling of the solution in the sample cup, and the acid mist in the sample cup is discharged, and then the lifting cover cylinder releases the lifting cover to obtain the sample solution to be tested.
进一步地,所述加热搅拌系统还包括电磁阀,用以控制控制氮气的通入与停止,调节压力;所述自动加液系统中的盐酸储存罐中含有电容式液位开关来报告液位信息,提醒及时加液。Further, the heating and stirring system also includes a solenoid valve, which is used to control the feeding and stopping of nitrogen gas, and adjust the pressure; the hydrochloric acid storage tank in the automatic liquid addition system contains a capacitive liquid level switch to report liquid level information , reminding to add liquid in time.
进一步地,所述滴定系统包括滴定仪、磁力搅拌器、滴定升降气缸;所述机器人系统将含有待测样品溶液的样品杯从所述加热搅拌系统移至所述滴定系统指定位置后,机械人手指松开,所述滴定升降气缸夹持安装滴定升降盖子;所述滴定仪向所述待测样品溶液中加入定量混合酸溶液;所述混合酸溶液加入完毕后,开始自动滴定;滴定结束后,向上位机输出使用的标准液体积,所述滴定升降气缸夹持取下所述滴定升降盖子;所述机器人系统将所述样品杯和废液送至指定位置;所述滴定仪能够实现自动滴定、电极的自动清洗并且能够输出滴定所用标准液的体积;所述滴定系统包括混合酸容器,所述混合酸容器中带有液位传感器,能够向上位机输出加入所述混合酸溶液的体积以及所述混合酸容器内液位信息;所述滴定系统还包括加水通道,实现对样品溶液的稀释。Further, the titration system includes a titrator, a magnetic stirrer, and a titration lifting cylinder; after the robot system moves the sample cup containing the sample solution to be tested from the heating and stirring system to the designated position of the titration system, the robot The finger is released, and the titration lifting cylinder clamps and installs the titration lifting cover; the titrator adds quantitative mixed acid solution to the sample solution to be tested; after the mixed acid solution is added, automatic titration starts; , output the volume of standard solution used to the upper computer, and the titration lifting cylinder clamps and removes the titration lifting cover; the robot system sends the sample cup and waste liquid to the designated position; the titrator can realize automatic Titration, automatic cleaning of electrodes and the ability to output the volume of the standard solution used in titration; the titration system includes a mixed acid container with a liquid level sensor, which can output the volume of the mixed acid solution to the host computer And the liquid level information in the mixed acid container; the titration system also includes a water adding channel to realize the dilution of the sample solution.
进一步地,所述清洗系统包括:清洗烘干机、废液桶、干净瓶架、脏瓶架;所述机器人系统将装有废液的样品杯从所述滴定系统中取出,送入所述脏瓶架,然后收集8个样品杯触发光电开关,所述清洗烘干机打开,所述机器人系统收到指令将所述样品杯送入所述清洗烘干机清洗烘干,所述机器人系统将清洗后的所述样品杯送至所述干净瓶架,等待下次检测时使用。Further, the cleaning system includes: a washing and drying machine, a waste liquid barrel, a clean bottle rack, and a dirty bottle rack; the robot system takes out the sample cup containing the waste liquid from the titration system and sends it into the Dirty bottle rack, then collect 8 sample cups to trigger the photoelectric switch, the cleaning and drying machine is turned on, the robot system receives the instruction to send the sample cups into the cleaning and drying machine for cleaning and drying, the robot system The cleaned sample cups are sent to the clean bottle rack for use in the next detection.
进一步地,所述机器人系统包括机器人手臂、机器人支架、机器人导轨、机器人手指;其中,所述机器人支架固定于地面上,所述机器人导轨安装于所述机器人支架上,使得所述机器人手臂能在所述机器人导轨的方向上水平移动;所述机器人手指安装于所述机器人手臂末端,并且与所述机器人手臂配合,完成对样品杯的夹持以及样品杯其在所述自动称样系统、加热搅拌系统、滴定系统、清洗系统中的转移。Further, the robot system includes a robot arm, a robot bracket, a robot guide rail, and a robot finger; wherein, the robot bracket is fixed on the ground, and the robot guide rail is installed on the robot bracket, so that the robot arm can The robot moves horizontally in the direction of the guide rail; the robot finger is installed at the end of the robot arm, and cooperates with the robot arm to complete the clamping of the sample cup and the sample cup in the automatic weighing system, heating Stirring system, titration system, transfer in cleaning system.
进一步地,所述控制系统包括控制系统硬件、控制系统软件、通讯系统;所述控制系统硬件包括PLC和上位机,所述PLC实现所述控制系统的逻辑控制,控制所述机器人系统按照操作流程顺序抓取摆放加样头及样品杯,并向所述自动称样系统、加热搅拌系统、滴定系统和清洗系统发送相关操作控制指令,完成整个检测;所述上位机实现所述合金成分全自动检测系统的人机交互功能,包括工艺流程参数的人工设定、数据采集存储、计算输出;同时所述上位机负责所述滴定系统指令调用和数据的计算,并通过触摸屏进行人机交互,直观呈现出结果。Further, the control system includes control system hardware, control system software, and a communication system; the control system hardware includes a PLC and a host computer, and the PLC realizes the logic control of the control system, and controls the robot system according to the operation flow Sequentially grasp and place the sampling heads and sample cups, and send relevant operation control instructions to the automatic weighing system, heating and stirring system, titration system and cleaning system to complete the entire detection; The human-computer interaction function of the automatic detection system includes manual setting of process parameters, data collection and storage, and calculation output; at the same time, the host computer is responsible for the titration system command call and data calculation, and performs human-computer interaction through the touch screen. Visually present the results.
本发明还提供了一种合金成分全自动检测的方法,使用权利要求1~9任意一项所述的合金成分全自动检测系统,所述方法包括以下步骤:The present invention also provides a method for fully automatic detection of alloy components, using the fully automatic detection system for alloy components described in any one of
步骤一、操作人员放置金属粉末样品以及粘贴条码,启动自动检测系统;
步骤二、所述机器人系统配合所述称样系统称取设定数量的金属粉末样品至样品杯中;Step 2, the robot system cooperates with the weighing system to weigh a set number of metal powder samples into the sample cup;
步骤三、所述机器人系统将称量好的所述金属粉末样品转移至所述加热搅拌系统中;Step 3, the robot system transfers the weighed metal powder sample to the heating and stirring system;
步骤四、加入水和酸液后,加热搅拌,获得待测样品溶液,所述机器人系统将所述待测样品溶液转移至所述滴定系统中,自动滴定测试所述某种金属粉末样品的成分含量;Step 4: After adding water and acid solution, heat and stir to obtain the sample solution to be tested, the robot system transfers the sample solution to be tested to the titration system, and automatically titrates the composition of the certain metal powder sample content;
步骤五、所述机器人系统将盛有废液的所述样品杯从所述滴定系统中取出,转移至所述清洗系统,并完成清洁;Step 5, the robot system takes out the sample cup containing the waste liquid from the titration system, transfers it to the cleaning system, and completes the cleaning;
步骤六、系统恢复初始状态,等待下一批测定。Step 6: The system returns to the initial state and waits for the next batch of measurements.
在本发明的较佳实施方式中,所述加热搅拌系统可以分组进行,可以对8个样品同时加热搅拌并充气加液,也可以根据需要控制被测样品的数量,加热的启动和停止都是自动进行控制,不需要全部开启和关闭电磁阀,在第一批加热过程中,第二批可以进行称样、充气、加液体等操作。In a preferred embodiment of the present invention, the heating and stirring system can be carried out in groups, and 8 samples can be heated and stirred at the same time and filled with gas and liquid, and the number of samples to be tested can also be controlled according to needs. The start and stop of heating are both Automatic control, no need to open and close all solenoid valves, during the first batch of heating, the second batch can carry out operations such as weighing samples, inflating, and adding liquids.
与现有技术相比,本发明具有以下有益技术效果:Compared with the prior art, the present invention has the following beneficial technical effects:
1.本发明应用智能全自动化学试验系统来代替传统的手工检测试验分析方法,可以成倍提高样品处理和试验分析的工作效率。高精度数字化设备本身具有高精度,且全自动化的流程避免了人工测量带来的误差,大大提高了化学反应的完全性和数据采集分析的准确性与可靠性。1. The present invention uses an intelligent automatic chemical test system to replace the traditional manual detection test analysis method, which can double the work efficiency of sample processing and test analysis. The high-precision digital equipment itself has high precision, and the fully automated process avoids errors caused by manual measurement, greatly improving the completeness of chemical reactions and the accuracy and reliability of data collection and analysis.
2.由于整个化学反应过程中避免了人的直接接触,也保证了人员的健康与安全,实现机器代人,为智能化工厂提供解决方案。对于酸液和气体都设计了专门的管道,有效避免了毒性物质泄漏,避免了安全事故的发生,环境也更加清洁和安全。2. Since direct contact with humans is avoided during the entire chemical reaction process, the health and safety of personnel is also guaranteed, realizing the replacement of humans by machines and providing solutions for intelligent chemical factories. Special pipelines are designed for acid liquid and gas, which effectively avoids the leakage of toxic substances, avoids the occurrence of safety accidents, and makes the environment cleaner and safer.
3.从成本角度来看,这套方案结合国内外成熟制造经验,所研制出的仪器在正常使用和定期维护的情况下,其可靠性和稳定性可在十年以上。而且操作简单,培训容易,对于人员的经验要求相对较低。同传统检测方法比较,一套设备可完成3~4个人的工作量,从而达到提高工作效率的目的,可以节约人力成本。3. From the perspective of cost, this scheme combines mature manufacturing experience at home and abroad, and the reliability and stability of the developed instrument can be more than ten years under normal use and regular maintenance. Moreover, the operation is simple, the training is easy, and the requirements for personnel experience are relatively low. Compared with traditional detection methods, a set of equipment can complete the workload of 3 to 4 people, so as to achieve the purpose of improving work efficiency and saving labor costs.
4.这套仪器不仅仅适合分析合金成分,同样也可进行其他化学成分的分析,只需更换其中的控制软件及数据库即可,因此具有非常广泛的适用性。4. This set of instruments is not only suitable for analyzing alloy composition, but also other chemical composition analysis, only need to replace the control software and database, so it has very wide applicability.
所以,无论从分析质量的可靠性来看,还是从使用成本来看,本方案无疑优于传统的检测方法。Therefore, no matter from the reliability of the analysis quality or the cost of use, this solution is undoubtedly superior to the traditional detection method.
以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。The idea, specific structure and technical effects of the present invention will be further described below in conjunction with the accompanying drawings, so as to fully understand the purpose, features and effects of the present invention.
附图说明Description of drawings
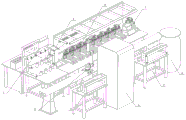
图1是本发明的一个较佳实施例的合金成分全自动检测系统的示意图;Fig. 1 is the schematic diagram of the alloy composition automatic detection system of a preferred embodiment of the present invention;
图2是本发明的一个较佳实施例的合金成分全自动检测系统的通讯控制网络架构图;Fig. 2 is a communication control network architecture diagram of an alloy composition automatic detection system of a preferred embodiment of the present invention;
图3是本发明的一个较佳实施例的合金成分全自动检测系统和方法进行测定的流程图;Fig. 3 is the flow chart that the alloy composition automatic detection system and method of a preferred embodiment of the present invention measure;
其中:1-上位机;2-机器人系统;3-干净瓶架;4-清洗烘干机;5-脏瓶架;6-废液桶;7-滴定系统;8-加热搅拌系统;9-自动称样系统。Among them: 1-host computer; 2-robot system; 3-clean bottle rack; 4-cleaning and drying machine; 5-dirty bottle rack; 6-waste liquid bucket; 7-titration system; 8-heating and stirring system; Automatic weighing system.
具体实施方式Detailed ways
以下参考说明书附图介绍本发明的多个优选实施例,使其技术内容更加清楚和便于理解。本发明可以通过许多不同形式的实施例来得以体现,本发明的保护范围并非仅限于文中提到的实施例。The following describes several preferred embodiments of the present invention with reference to the accompanying drawings, so as to make the technical content clearer and easier to understand. The present invention can be embodied in many different forms of embodiments, and the protection scope of the present invention is not limited to the embodiments mentioned herein.
在附图中,结构相同的部件以相同数字标号表示,各处结构或功能相似的组件以相似数字标号表示。附图所示的每一组件的尺寸和厚度是任意示出的,本发明并没有限定每个组件的尺寸和厚度。为了使图示更清晰,附图中有些地方适当夸大了部件的厚度。In the drawings, components with the same structure are denoted by the same numerals, and components with similar structures or functions are denoted by similar numerals. The size and thickness of each component shown in the drawings are shown arbitrarily, and the present invention does not limit the size and thickness of each component. In order to make the illustration clearer, the thickness of parts is appropriately exaggerated in some places in the drawings.
如图1所示,为合金成分全自动检测系统的三维结构示意图。该合金成分全自动检测系统包括上位机1、机器人系统2、干净瓶架3、清洗烘干机4、脏瓶架5、废液桶6、滴定系统7、加热搅拌系统8和自动称样系统9。As shown in Figure 1, it is a schematic diagram of the three-dimensional structure of the automatic detection system for alloy composition. The alloy composition automatic detection system includes
图2为合金成分全自动检测系统的通讯控制网络架构图,由通讯控制网络完成各个系统间信息交流;具体的,扫描器通过USB线直接连接上位机实现扫码功能;滴定仪、加热搅拌器、蠕动泵通过RS232链接到RS232转以太网网口,再通过网线连接至以太网交换机;以太网交换机直接与天平、机器人、上位机、PLC连接,PLC与各个传感器直接相连,可获取各传感器的状态信息,从而实现整个系统的通讯功能。Figure 2 is a diagram of the communication control network architecture of the alloy composition automatic detection system. The communication control network completes the information exchange between each system; specifically, the scanner is directly connected to the host computer through a USB cable to realize the code scanning function; the titrator, heating stirrer , The peristaltic pump is connected to the RS232 to Ethernet port through RS232, and then connected to the Ethernet switch through the network cable; the Ethernet switch is directly connected to the balance, robot, upper computer, and PLC, and the PLC is directly connected to each sensor to obtain the data of each sensor. State information, so as to realize the communication function of the whole system.
如图3所示,为本发明实施例的合金成分全自动检测系统和方法进行测定的流程图。合金成分全自动检测方法的具体实现步骤如下:As shown in FIG. 3 , it is a flow chart of the alloy composition automatic detection system and method of the embodiment of the present invention. The specific implementation steps of the automatic detection method for alloy composition are as follows:
步骤1、操作人员打印样品种类条码,将其粘贴到小棕瓶上,取金属粉末加入到小棕瓶中,用扫描仪扫描瓶上条码,录入该样品编号将小棕瓶安装在加样头上并按次序放在加样头放置区,重复直至放好8个加样头。在每个样品杯中分别加入一个搅拌子,检查上述步骤,确认无误后在工控机上按下准备完成按钮。
步骤2、机器人系统取含有样品的加样头安装到秤的加样装置上,然后取空瓶放置到秤上,秤按照设定值进行加样。Step 2. The robot system takes the sampling head containing the sample and installs it on the sampling device of the scale, then takes the empty bottle and places it on the scale, and the scale adds the sample according to the set value.
步骤3、机器人系统取称量好的样品杯放置到磁力搅拌器上,夹紧气缸动作夹住瓶子。蠕动泵加水,磁力搅拌器开始搅拌,升降抓盖气缸动作将升降盖子盖上,充入氮气,将空气排出。Step 3. The robot system takes the weighed sample cup and places it on the magnetic stirrer, and clamps the bottle by clamping the cylinder. The peristaltic pump adds water, the magnetic stirrer starts to stir, and the lift and catch cylinder moves to close the lift cover, fill with nitrogen, and discharge the air.
步骤4、盐酸阀打开,蠕动泵工作,加入盐酸,盐酸阀关闭,磁力搅拌器开始加热并搅拌。加热温度改变,直至蒸干,加热和搅拌停止。升降抓盖气缸动作,将样品杯上移,离开加热板冷却。升降抓盖气缸动作,将样品杯下移,水阀打开,水泵加水。水阀关闭,搅拌开启。混酸阀开,蠕动泵加混合酸溶液适量,氮气阀关闭,搅拌关闭。Step 4, the hydrochloric acid valve is opened, the peristaltic pump works, hydrochloric acid is added, the hydrochloric acid valve is closed, and the magnetic stirrer starts heating and stirring. The heating temperature was changed until evaporation to dryness, heating and stirring were stopped. Lifting and grabbing the lid cylinder moves to move the sample cup up and away from the heating plate for cooling. Lifting and grabbing cylinder moves, the sample cup is moved down, the water valve is opened, and the water pump adds water. The water valve is closed and the agitation is turned on. The mixed acid valve is opened, the peristaltic pump adds an appropriate amount of mixed acid solution, the nitrogen valve is closed, and the stirring is closed.
步骤5、机器人手臂将杯子移动到滴定仪的磁力搅拌器上,滴定升降气缸动作,将瓶子夹住。滴定升降气缸下降,将滴定仪的电极、滴定管伸入杯内。磁力搅拌器开始搅拌,滴定仪开始滴定。滴定完成后,磁力搅拌器关闭,数据传到上位机。水阀打开,蠕动泵工作,清洗滴定管。Step 5. The robot arm moves the cup to the magnetic stirrer of the titrator, and the titration lifting cylinder moves to clamp the bottle. The titration lifting cylinder descends, and the electrode and burette of the titrator are extended into the cup. The magnetic stirrer starts to stir and the titrator starts to titrate. After the titration is completed, the magnetic stirrer is turned off, and the data is transmitted to the host computer. The water valve is opened, the peristaltic pump works, and the burette is cleaned.
步骤6、机器人手臂从滴定系统抓取含有废液的样品杯,机器人手臂将废液倒入废液桶,机器人手臂将样品杯放到脏瓶架,光电传感器检测到缓存区上收集齐8个样品杯。清洗机门打开,机器人将8个样品杯依次放入清洗机,进行清洗。清洗完成后清洗机门打开,机器人取清洗机中样品杯放入干净瓶架。
步骤7、系统恢复到初始状态,等待下一批样品的测定。
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。The preferred specific embodiments of the present invention have been described in detail above. It should be understood that those skilled in the art can make many modifications and changes according to the concept of the present invention without creative efforts. Therefore, all technical solutions that can be obtained by those skilled in the art based on the concept of the present invention through logical analysis, reasoning or limited experiments on the basis of the prior art shall be within the scope of protection defined by the claims.
Claims (10)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202310134660.8A CN115951077A (en) | 2023-02-17 | 2023-02-17 | A fully automatic detection system and method for alloy composition |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202310134660.8A CN115951077A (en) | 2023-02-17 | 2023-02-17 | A fully automatic detection system and method for alloy composition |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN115951077A true CN115951077A (en) | 2023-04-11 |
Family
ID=87287873
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202310134660.8A Pending CN115951077A (en) | 2023-02-17 | 2023-02-17 | A fully automatic detection system and method for alloy composition |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115951077A (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN118534145A (en) * | 2024-07-08 | 2024-08-23 | 上海昂林科学仪器股份有限公司 | Full-automatic COD (chemical oxygen demand) tester and using method thereof |
| CN118961502A (en) * | 2024-08-05 | 2024-11-15 | 华能铜川照金煤电有限公司 | A system and method for detecting oxidation stability of phosphate ester fire-resistant oil |
| CN120891217A (en) * | 2025-09-30 | 2025-11-04 | 北京戴纳实验科技股份有限公司 | An automated laboratory titration detection device |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0829432A (en) * | 1994-07-15 | 1996-02-02 | Shimadzu Corp | Automatic sample preparation device |
| US20110269239A1 (en) * | 2008-10-01 | 2011-11-03 | Bayer Technology Services Gmbh | Apparatus for Automatically Performing Analyses |
| CN106645136A (en) * | 2016-08-29 | 2017-05-10 | 海安华达石油仪器有限公司 | Chlorine salt content meter |
| CN109061043A (en) * | 2018-09-29 | 2018-12-21 | 杭州启绿科技有限公司 | A kind of permanganate index analyzer and permanganate index analysis method |
| CN213337673U (en) * | 2020-09-30 | 2021-06-01 | 清华大学合肥公共安全研究院 | Full-automatic COD (chemical oxygen demand) analysis device |
| CN113176375A (en) * | 2021-04-29 | 2021-07-27 | 安徽机电职业技术学院 | Special intelligent test system for ferrous oxide determination |
-
2023
- 2023-02-17 CN CN202310134660.8A patent/CN115951077A/en active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0829432A (en) * | 1994-07-15 | 1996-02-02 | Shimadzu Corp | Automatic sample preparation device |
| US20110269239A1 (en) * | 2008-10-01 | 2011-11-03 | Bayer Technology Services Gmbh | Apparatus for Automatically Performing Analyses |
| CN106645136A (en) * | 2016-08-29 | 2017-05-10 | 海安华达石油仪器有限公司 | Chlorine salt content meter |
| CN109061043A (en) * | 2018-09-29 | 2018-12-21 | 杭州启绿科技有限公司 | A kind of permanganate index analyzer and permanganate index analysis method |
| CN213337673U (en) * | 2020-09-30 | 2021-06-01 | 清华大学合肥公共安全研究院 | Full-automatic COD (chemical oxygen demand) analysis device |
| CN113176375A (en) * | 2021-04-29 | 2021-07-27 | 安徽机电职业技术学院 | Special intelligent test system for ferrous oxide determination |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN118534145A (en) * | 2024-07-08 | 2024-08-23 | 上海昂林科学仪器股份有限公司 | Full-automatic COD (chemical oxygen demand) tester and using method thereof |
| CN118534145B (en) * | 2024-07-08 | 2024-11-08 | 上海昂林科学仪器股份有限公司 | Full-automatic COD (chemical oxygen demand) tester and using method thereof |
| CN118961502A (en) * | 2024-08-05 | 2024-11-15 | 华能铜川照金煤电有限公司 | A system and method for detecting oxidation stability of phosphate ester fire-resistant oil |
| CN120891217A (en) * | 2025-09-30 | 2025-11-04 | 北京戴纳实验科技股份有限公司 | An automated laboratory titration detection device |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN115951077A (en) | A fully automatic detection system and method for alloy composition | |
| CN102265166A (en) | Automatic analyzing apparatus, and specimen batching method in automatic analyzing apparatus | |
| SK159698A3 (en) | Apparatus for performing laboratory tests | |
| WO2022193217A1 (en) | Fully automatic intelligent ph value detection device | |
| CN116678693A (en) | Pretreatment device for determination of free silica | |
| CN114965304A (en) | Automatic total phosphorus analytical equipment of quality of water | |
| CN110736847A (en) | Full-automatic sample preparation and moisture determination system for kinds of ores | |
| WO2022176556A1 (en) | Automatic analysis device and method for suctioning sample in automatic analysis device | |
| JPH04295764A (en) | Automatic chemical analyzer | |
| CN2485657Y (en) | Automatic inspector for amonia and nitrogen contents in sewage | |
| CN201524578U (en) | Reaction tray | |
| WO2006106597A1 (en) | Multiple-sample autoprocessing system and method of multiple-sample autoprocessing | |
| JP2000146985A (en) | Automatic unstopping apparatus | |
| EP0787990A1 (en) | Automatic analyzer | |
| JPH06160377A (en) | Method and apparatus for analyzing water quality | |
| CN220982861U (en) | Detection equipment with drying device | |
| CN218727147U (en) | Liquid sodium hydroxide-based surface treatment agent pre-production test equipment | |
| CN217350734U (en) | Full-automatic preparation facilities of prefabricated reagent | |
| KR100753687B1 (en) | Automatic sample analysis using robot and automatic sample analysis device | |
| CN215339501U (en) | Automatic pretreatment device for oil smoke and oil mist | |
| CN214252322U (en) | Turning mechanism of blood testing machine | |
| JP2001305145A (en) | Autoanalyzer | |
| CN106769648B (en) | A method of automatically determining coke true relative density | |
| JPH04138365A (en) | Automatic chemical analysis method and device | |
| CN213903017U (en) | Sampling analysis system for methanesulfonic acid production line |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |