CN115797410A - A vehicle tracking method and system - Google Patents
A vehicle tracking method and system Download PDFInfo
- Publication number
- CN115797410A CN115797410A CN202211627746.6A CN202211627746A CN115797410A CN 115797410 A CN115797410 A CN 115797410A CN 202211627746 A CN202211627746 A CN 202211627746A CN 115797410 A CN115797410 A CN 115797410A
- Authority
- CN
- China
- Prior art keywords
- vehicle
- target
- tracking
- sequence
- real
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Landscapes
- Image Analysis (AREA)
Abstract
本发明涉及目标识别技术领域,公开一种车辆跟踪方法和系统,方法包括:提取目标车辆在初始帧图像中的初始信息,根据初始信息对其余帧图像进行跟踪得到目标车辆在其余帧中的位置信息;提取目标车辆的特征信息并分配ID,存储目标车辆的ID、位置信息和特征信息作为记忆序列;进行重新跟踪获取实时检测车辆目标,结合记忆序列和实时检测车辆目标使用注意力机制计算加权键值;对加权键值进行分类,根据分类结果判断实时检测车辆目标中已出现过的车辆并与记忆序列中的目标车辆ID关联;系统包括实现方法各步骤的模块。本发明可以实现对丢失目标车辆的重新跟踪、提高重新跟踪的准确率和整体跟踪过程的鲁棒性、应用范围广。
The present invention relates to the technical field of target recognition, and discloses a vehicle tracking method and system. The method includes: extracting the initial information of the target vehicle in the initial frame image, and tracking the remaining frame images according to the initial information to obtain the position of the target vehicle in the remaining frames Information; extract the feature information of the target vehicle and assign ID, store the ID, location information and feature information of the target vehicle as a memory sequence; perform re-tracking to obtain real-time detection of vehicle targets, and use the attention mechanism to calculate weights in combination with the memory sequence and real-time detection of vehicle targets key value; classify the weighted key value, judge the vehicle that has appeared in the vehicle target in real time according to the classification result and associate it with the target vehicle ID in the memory sequence; the system includes modules for implementing each step of the method. The invention can realize the re-tracking of the lost target vehicle, improve the accuracy of the re-tracking and the robustness of the whole tracking process, and has wide application range.
Description
技术领域technical field
本发明涉及目标识别技术领域,尤其是指一种车辆跟踪方法和系统。The invention relates to the technical field of target recognition, in particular to a vehicle tracking method and system.
背景技术Background technique
车辆跟踪是指对视频中的车辆目标进行检测并赋予ID进行轨迹跟踪;识别出的不同车辆目标拥有不同的ID,以供后续子任务调用。在车辆跟踪的过程中,跟踪目标在运动过程中会存在被遮挡或短暂消失的情况,从而导致跟踪失败、跟踪目标丢失。出现这种情况的原因有:跟踪框从车辆目标上漂移到遮挡物或者背景信息上,或者车辆目标被完全遮挡造成跟踪模型完全丢失所跟踪的目标,从而导致跟踪失败。Vehicle tracking refers to detecting and assigning IDs to vehicle targets in the video for trajectory tracking; different identified vehicle targets have different IDs for subsequent subtask calls. In the process of vehicle tracking, the tracking target may be blocked or disappear temporarily during the movement process, resulting in tracking failure and loss of the tracking target. The reasons for this situation are: the tracking frame drifts from the vehicle target to the occluder or background information, or the vehicle target is completely occluded, causing the tracking model to completely lose the tracked target, resulting in tracking failure.
现有技术中,有研究者研究了基于多特征空间融合的道路车辆跟踪方法(专利公开号:CN110517291A),该方法构建积分图计算水平边缘特征、垂直边缘特征和对角边缘特征,获取Haar-like形状特征。该方法的不足之处在于,用Haar-like形状特征来描述车辆的外形特征,当车辆目标相互遮挡时,Haar-like特征很容易将干扰物误判断为跟踪目标,导致跟踪目标漂移等跟踪失败行为。而在车辆跟踪实际应用场景中,如交通十字路口,车辆在等待红灯期间很容易产生相关遮挡的情况。因此该方法的鲁棒性无法达到车辆跟踪实际应用要求。针对上述方法中的不足,有研究者研究了基于目标特征敏感性和深度学习的车辆跟踪方法(专利公开号:CN111062973A),该方法构建并训练判别式连体网络,通过训练好的公用网络模型提取特征并挑选对车辆目标更敏感的滤波器,使用判别式连体网络和挑选过的敏感滤波器实现对车辆目标的跟踪。该方法由于引入了高敏感性的滤波器,在车辆跟踪中的召回效果更好,对于部分遮挡的车辆目标能够很好的追踪。但是,高敏感性的滤波器也带来了低精准率的缺点,容易召回假阳性目标。In the prior art, some researchers have studied a road vehicle tracking method based on multi-feature space fusion (patent publication number: CN110517291A). This method constructs an integral map to calculate horizontal edge features, vertical edge features and diagonal edge features, and obtains Haar- like shape features. The disadvantage of this method is that the Haar-like shape feature is used to describe the shape features of the vehicle. When the vehicle targets are occluded by each other, the Haar-like feature is easy to misjudge the interferer as the tracking target, resulting in tracking failure such as tracking target drift. Behavior. However, in the actual application scenarios of vehicle tracking, such as traffic intersections, it is easy for vehicles to generate related occlusions while waiting for red lights. Therefore, the robustness of this method cannot meet the practical application requirements of vehicle tracking. Aiming at the deficiencies in the above methods, some researchers have studied a vehicle tracking method based on target feature sensitivity and deep learning (patent publication number: CN111062973A). This method constructs and trains a discriminative Siamese network. Extract features and select a filter that is more sensitive to the vehicle target, and use the discriminative Siamese network and the selected sensitive filter to track the vehicle target. Due to the introduction of high-sensitivity filters, this method has a better recall effect in vehicle tracking, and can track partially occluded vehicle targets well. However, the high-sensitivity filter also brings the disadvantage of low precision, and it is easy to recall false positive targets.
在现有的这些研究中,目标都是为了得到一个鲁棒性更强的跟踪模型,这种范式只能尽量保证跟踪过程更加稳定,但是没有任何跟踪系统能保证百分之百跟踪准确。并且,现有技术中一旦跟踪过程中断,后续帧中即使重新检测出跟踪失败的车辆目标,也无法与前期跟踪过程中对应的跟踪目标重新相联系,无法确定新检测出来的车辆目标是第一次进入视频上下文还是由于跟踪丢失而再次被检测到的,无法实现跟踪丢失目标的重新跟踪。In these existing studies, the goal is to obtain a more robust tracking model. This paradigm can only try to ensure a more stable tracking process, but no tracking system can guarantee 100% tracking accuracy. Moreover, once the tracking process is interrupted in the prior art, even if the failed vehicle target is re-detected in subsequent frames, it cannot be reconnected with the corresponding tracking target in the previous tracking process, and it cannot be determined that the newly detected vehicle target is the first one. The first entry into the video context is detected again due to tracking loss, and the re-tracking of the lost target cannot be achieved.
发明内容Contents of the invention
为此,本发明所要解决的技术问题在于克服现有技术中的不足,提供一种车辆跟踪方法和系统,可以实现对丢失目标车辆的重新跟踪、提高重新跟踪的准确率和整体跟踪过程的鲁棒性、应用范围广。For this reason, the technical problem to be solved by the present invention is to overcome the deficiencies in the prior art and provide a vehicle tracking method and system, which can realize the re-tracking of the lost target vehicle, improve the accuracy of re-tracking and the robustness of the overall tracking process. Rod, wide range of applications.
为解决上述技术问题,本发明提供了一种车辆跟踪方法,包括:In order to solve the above technical problems, the present invention provides a vehicle tracking method, comprising:
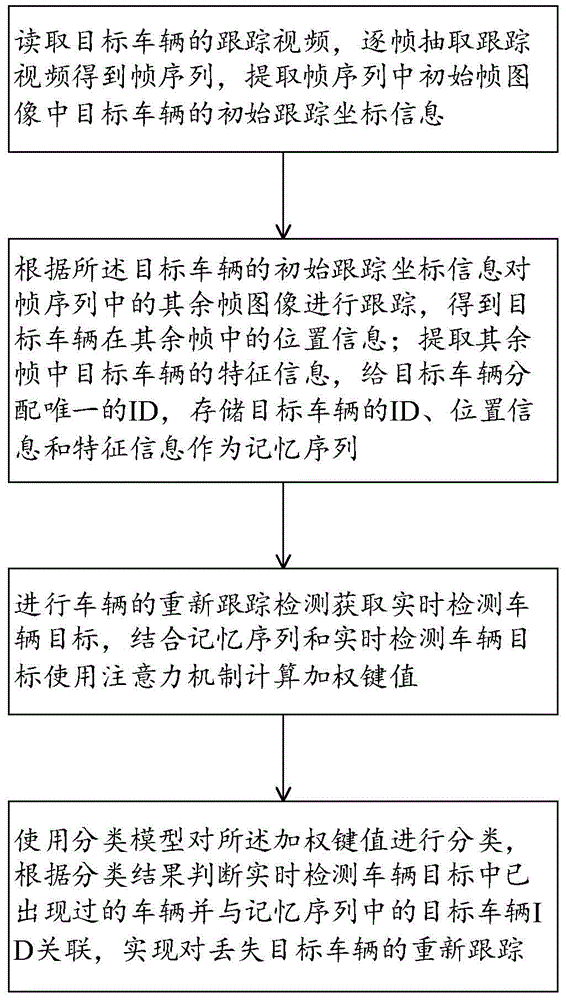
读取目标车辆的跟踪视频,逐帧抽取跟踪视频得到帧序列,提取帧序列中初始帧图像中目标车辆的初始跟踪坐标信息;Read the tracking video of the target vehicle, extract the tracking video frame by frame to obtain a frame sequence, and extract the initial tracking coordinate information of the target vehicle in the initial frame image in the frame sequence;
根据所述目标车辆的初始跟踪坐标信息对帧序列中的其余帧图像进行跟踪,得到目标车辆在其余帧中的位置信息;提取其余帧中目标车辆的特征信息,给目标车辆分配唯一的ID,存储目标车辆的ID、位置信息和特征信息作为记忆序列;According to the initial tracking coordinate information of the target vehicle, the remaining frame images in the frame sequence are tracked to obtain the position information of the target vehicle in the remaining frames; the feature information of the target vehicle in the remaining frames is extracted, and a unique ID is assigned to the target vehicle, Store the ID, location information and feature information of the target vehicle as a memory sequence;
进行车辆的重新跟踪检测获取实时检测车辆目标,结合记忆序列和实时检测车辆目标使用注意力机制计算加权键值;Perform vehicle re-tracking detection to obtain real-time detection of vehicle targets, and use the attention mechanism to calculate weighted key values in combination with memory sequences and real-time detection of vehicle targets;
使用分类模型对所述加权键值进行分类,根据分类结果判断实时检测车辆目标中已出现过的车辆并与记忆序列中的目标车辆ID关联,实现对丢失目标车辆的重新跟踪。The classification model is used to classify the weighted key values, and according to the classification results, it is judged that the vehicles that have appeared in the vehicle target are detected in real time and associated with the target vehicle ID in the memory sequence, so as to realize the re-tracking of the lost target vehicle.
在本发明的一个实施例中,所述提取帧序列中初始帧图像中目标车辆的初始跟踪坐标信息时,使用yolo5目标检测模型。In one embodiment of the present invention, the yolo5 target detection model is used when extracting the initial tracking coordinate information of the target vehicle in the initial frame image in the frame sequence.
在本发明的一个实施例中,所述提取其余帧中目标车辆的特征时,使用卷积神经网络、残差网络或自注意力机制。In one embodiment of the present invention, when extracting the features of the target vehicle in the remaining frames, a convolutional neural network, a residual network or a self-attention mechanism is used.
在本发明的一个实施例中,所述记忆序列以键值对的形式存储目标车辆在其余帧中的位置信息和特征信息,所述记忆序列的键名为目标车辆的ID,所述记忆序列的键值为一个队列,队列元素为按照时间顺序存放的各个时间步下的目标车辆的位置信息和特征信息。In one embodiment of the present invention, the memory sequence stores the position information and feature information of the target vehicle in the remaining frames in the form of key-value pairs, the key name of the memory sequence is the ID of the target vehicle, and the memory sequence The key value of is a queue, and the queue elements are the position information and feature information of the target vehicle at each time step stored in chronological order.
在本发明的一个实施例中,所述结合记忆序列和实时检测车辆目标使用注意力机制计算加权键值,具体为:In one embodiment of the present invention, the weighted key value is calculated using the attention mechanism in combination with the memory sequence and the real-time detection of the vehicle target, specifically:
提取实时检测车辆目标的特征信息,将实时检测车辆目标的特征信息作为注意力机制的查询Q;Extract the feature information of the real-time detection vehicle target, and use the feature information of the real-time detection vehicle target as the query Q of the attention mechanism;
对记忆序列中的位置信息和特征信息分别进行平均池化,将平均池化后的键值对作为注意力机制的键值信息(K,V);Average pooling is performed on the position information and feature information in the memory sequence, and the key-value pairs after average pooling are used as the key-value information (K, V) of the attention mechanism;
使用注意力机制计算加权键值A为:Use the attention mechanism to calculate the weighted key value A as:
其中,(Ki,Vi)表示平均池化后的键值对,i=0,1,2,…,N,N表示记忆序列中位置信息和特征信息的个数;α(Q,Ki)表示每个键值对的注意力概率分布。Among them, (K i , V i ) represents the key-value pair after average pooling, i=0,1,2,...,N, N represents the number of position information and feature information in the memory sequence; α(Q,K i ) represents the attention probability distribution for each key-value pair.
在本发明的一个实施例中,所述每个键值对的注意力概率分布α(Q,Ki)的计算方法为:In one embodiment of the present invention, the calculation method of the attention probability distribution α(Q,K i ) of each key-value pair is:

其中,score(Q,Ki)表示标量评分,exp()表示指数函数。Among them, score(Q,K i ) represents a scalar score, and exp() represents an exponential function.
在本发明的一个实施例中,所述标量评分score(Q,Ki)的计算方法为:In one embodiment of the present invention, the calculation method of the scalar score score(Q,K i ) is:

其中,d是Q的维度。where d is the dimension of Q.
在本发明的一个实施例中,所述分类模型为前馈神经网络、逻辑回归分类或者支持向量机。In one embodiment of the present invention, the classification model is a feed-forward neural network, logistic regression classification or support vector machine.
在本发明的一个实施例中,所述根据分类结果判断实时检测车辆目标中已出现过的车辆并与记忆序列中的目标车辆ID关联,具体为:In one embodiment of the present invention, according to the classification result, it is judged that the vehicle that has appeared in the vehicle target is detected in real time and associated with the target vehicle ID in the memory sequence, specifically:
当分类模型输出的结果为1时,获取此时的加权键值对应的实时检测车辆目标的特征,计算实时检测车辆目标的特征与记忆序列中的各目标车辆的特征的相似度,将相似度最大的记忆序列中的目标车辆ID作为实时检测车辆目标的ID。When the output result of the classification model is 1, obtain the feature of the real-time detected vehicle target corresponding to the weighted key value at this time, calculate the similarity between the feature of the real-time detected vehicle target and the feature of each target vehicle in the memory sequence, and convert the similarity The target vehicle ID in the largest memory sequence is used as the real-time detection vehicle target ID.
本发明还提供了一种车辆跟踪系统,包括车辆目标检测模块、车辆目标跟踪模块、特征提取模块、记忆缓存模块和重跟踪模块,The present invention also provides a vehicle tracking system, including a vehicle target detection module, a vehicle target tracking module, a feature extraction module, a memory cache module and a re-tracking module,
所述车辆目标检测模块读取目标车辆的跟踪视频,逐帧抽取跟踪视频得到帧序列,提取帧序列中初始帧图像中目标车辆的初始跟踪坐标信息并传送给所述车辆目标跟踪模块;The vehicle target detection module reads the tracking video of the target vehicle, extracts the tracking video frame by frame to obtain a frame sequence, extracts the initial tracking coordinate information of the target vehicle in the initial frame image in the frame sequence and sends it to the vehicle target tracking module;
所述车辆目标跟踪模块根据所述目标车辆的初始跟踪坐标信息对帧序列中的其余帧图像进行跟踪,得到目标车辆在其余帧中的位置信息并传送给所述记忆缓存模块;The vehicle target tracking module tracks the remaining frame images in the frame sequence according to the initial tracking coordinate information of the target vehicle, obtains the position information of the target vehicle in the remaining frames and transmits it to the memory cache module;
所述特征提取模块提取其余帧中目标车辆的特征信息并传送给所述记忆缓存模块;The feature extraction module extracts the feature information of the target vehicle in the remaining frames and sends it to the memory cache module;
所述记忆缓存模块给目标车辆分配唯一的ID,存储目标车辆的ID、位置信息和特征信息作为记忆序列;The memory cache module assigns a unique ID to the target vehicle, and stores the ID, location information and feature information of the target vehicle as a memory sequence;
所述重跟踪模块进行车辆的重新跟踪检测获取实时检测车辆目标,结合记忆序列和实时检测车辆目标使用注意力机制计算加权键值;使用分类模型对所述加权键值进行分类,根据分类结果判断实时检测车辆目标中已出现过的车辆并与记忆序列中的目标车辆关联,实现对丢失目标车辆的重新跟踪。The re-tracking module performs re-tracking detection of the vehicle to obtain real-time detection of vehicle targets, and uses the attention mechanism to calculate weighted key values in combination with the memory sequence and real-time detection of vehicle targets; uses a classification model to classify the weighted key values, and judges according to the classification results Real-time detection of vehicles that have appeared in the vehicle target and correlate with the target vehicle in the memory sequence to realize the re-tracking of the lost target vehicle.
本发明的上述技术方案相比现有技术具有以下优点:The above technical solution of the present invention has the following advantages compared with the prior art:
本发明通过记录跟踪目标车辆的记忆序列,并在跟踪目标丢失后根据记忆序列将重新出现的检测目标与跟踪目标关联,实现了对丢失目标车辆的重新跟踪;使用注意力机制和分类模型实现对检测目标与跟踪目标的关联,可以有效利用两者间的联系,匹配准确性高,从而提升重新跟踪的准确率;记忆序列结构简单,可以在实现重新跟踪的同时降低存储要求;在默认车辆跟踪模型存在跟踪失败的前提下可以在跟踪失败之后重新捕获丢失的目标,提升了整个追踪过程的鲁棒性,使得本发明可以接受不完美的车辆跟踪模型,扩大应用领域。The present invention realizes the re-tracking of the lost target vehicle by recording the memory sequence of the tracking target vehicle, and associating the reappearing detection target with the tracking target according to the memory sequence after the tracking target is lost; using the attention mechanism and the classification model to realize the tracking The association between the detection target and the tracking target can effectively use the connection between the two, and the matching accuracy is high, thereby improving the accuracy of re-tracking; the memory sequence structure is simple, which can reduce storage requirements while realizing re-tracking; in the default vehicle tracking On the premise that there is a tracking failure in the model, the lost target can be recaptured after the tracking failure, which improves the robustness of the entire tracking process, enables the present invention to accept imperfect vehicle tracking models, and expands the application field.
附图说明Description of drawings
为了使本发明的内容更容易被清楚的理解,下面根据本发明的具体实施例并结合附图,对本发明作进一步详细的说明,其中:In order to make the content of the present invention more easily understood, the present invention will be described in further detail below according to specific embodiments of the present invention in conjunction with the accompanying drawings, wherein:
图1是本发明的流程图,Fig. 1 is a flow chart of the present invention,
图2是本发明中车辆检测阶段的示意图,Fig. 2 is a schematic diagram of the vehicle detection stage in the present invention,
图3是本发明中车辆跟踪阶段的示意图。Fig. 3 is a schematic diagram of the vehicle tracking stage in the present invention.
具体实施方式Detailed ways
下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好地理解本发明并能予以实施,但所举实施例不作为对本发明的限定。The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, so that those skilled in the art can better understand the present invention and implement it, but the examples given are not intended to limit the present invention.
在接受存在跟踪目标由于遮挡而丢失的这种情况的前提下,本发明着力解决跟踪目标丢失后如何重识别的问题。本发明针对车辆目标跟踪过程中由于遮挡或目标暂时消失而导致的跟踪失败问题,提出了一种高鲁棒性的车辆跟踪方法,在所跟踪的车辆目标丢失一定的时间步又重新检测到之后,仍然能够将视频上下文中跟踪中断的目标之间相互联系起来,并赋予相同的ID。On the premise of accepting the fact that the tracking target is lost due to occlusion, the present invention focuses on solving the problem of how to re-identify the tracking target after it is lost. Aiming at the problem of tracking failure caused by occlusion or temporary disappearance of the target during the tracking process of the vehicle target, the present invention proposes a highly robust vehicle tracking method. After the tracked vehicle target is lost for a certain time step and re-detected , still be able to associate the objects of the tracking interruption in the video context with each other and give them the same ID.
实施例一Embodiment one
参照图1所示,本发明公开了一种车辆跟踪方法,包括以下步骤:With reference to shown in Fig. 1, the present invention discloses a kind of vehicle tracking method, comprises the following steps:
S1:读取目标车辆的跟踪视频,逐帧抽取跟踪视频得到帧序列,提取帧序列中初始帧图像中目标车辆的初始跟踪坐标信息;本实施例中初始帧为帧序列中的第一帧图像,提取帧序列中初始帧图像中目标车辆的初始跟踪坐标信息时使用yolo5目标检测模型。S1: Read the tracking video of the target vehicle, extract the tracking video frame by frame to obtain a frame sequence, and extract the initial tracking coordinate information of the target vehicle in the initial frame image in the frame sequence; the initial frame in this embodiment is the first frame image in the frame sequence , use the yolo5 target detection model when extracting the initial tracking coordinate information of the target vehicle in the initial frame image in the frame sequence.
S2:根据所述目标车辆的初始跟踪坐标信息对帧序列中的其余帧图像进行跟踪,得到初始帧中的目标车辆在其余帧中的位置信息;使用卷积神经网络(ConvolutionalNeural Networks,CNN)、残差网络或自注意力机制等方法提取其余帧中目标车辆的特征信息。给目标车辆分配唯一的ID,存储目标车辆ID、目标车辆在其余帧中的(即在不同时间步的)位置信息和特征信息作为记忆序列。S2: Track the remaining frame images in the frame sequence according to the initial tracking coordinate information of the target vehicle, and obtain the position information of the target vehicle in the initial frame in the remaining frames; use a convolutional neural network (Convolutional Neural Networks, CNN), Methods such as residual network or self-attention mechanism extract the feature information of the target vehicle in the remaining frames. Assign a unique ID to the target vehicle, and store the target vehicle ID, position information and feature information of the target vehicle in the remaining frames (that is, at different time steps) as a memory sequence.
记忆序列以键值对的形式存储目标车辆在其余帧中的位置信息和特征信息,所述记忆序列的键名为目标车辆的ID,所述记忆序列的键值为一个队列,队列元素为按照时间顺序存放的各个时间步下的目标车辆的位置信息和特征信息。记忆序列的队列元素采用“先进先出”的结构,当存储时间步数量达到最大值时,最先进入记忆序列的信息被丢掉,以保证记忆序列的实时性。记忆序列采用字典的数据结构来实现,其中字典中每一项由目标车辆的ID映射到一个队列,队列中存放当前目标车辆在各个时间步的跟踪位置信息和特征信息。The memory sequence stores the position information and feature information of the target vehicle in the remaining frames in the form of key-value pairs, the key name of the memory sequence is the ID of the target vehicle, the key value of the memory sequence is a queue, and the queue elements are according to The location information and feature information of the target vehicle under each time step stored in time order. The queue elements of the memory sequence adopt a "first in, first out" structure. When the number of storage time steps reaches the maximum value, the information that first enters the memory sequence is discarded to ensure the real-time performance of the memory sequence. The memory sequence is realized by the data structure of the dictionary, in which each item in the dictionary is mapped to a queue by the ID of the target vehicle, and the tracking position information and feature information of the current target vehicle at each time step are stored in the queue.
车辆目标跟踪时输入上一帧中目标的跟踪位置信息和当前帧的图像,进行跟踪,并输出上一帧中的目标在当前帧的跟踪结果。一方面,跟踪结果作为跟踪任务的最终输出;另一方面,将跟踪框内像素信息经过特征提取提取当前帧的目标特征之后,和当前帧中该目标的跟踪位置信息一起存储到记忆序列中,供实时跟踪检测阶段的重跟踪任务使用。When the vehicle target is tracked, the tracking position information of the target in the previous frame and the image of the current frame are input, tracked, and the tracking result of the target in the previous frame in the current frame is output. On the one hand, the tracking result is the final output of the tracking task; on the other hand, the pixel information in the tracking frame is extracted through feature extraction to extract the target features of the current frame, and stored in the memory sequence together with the tracking position information of the target in the current frame. Used by the re-tracking task in the real-time tracking detection phase.
S3:进行车辆的重新跟踪检测获取实时检测车辆目标,结合记忆序列和实时检测车辆目标使用注意力机制计算加权键值。S3: Perform vehicle re-tracking detection to obtain real-time detection of vehicle targets, and use the attention mechanism to calculate weighted key values in combination with memory sequences and real-time detection of vehicle targets.
S3-1:使用基于多特征空间融合的道路车辆跟踪方法、基于目标特征敏感性和深度学习的车辆跟踪方法、或者其他车辆目标跟踪方法进行车辆的重新跟踪检测获取实时检测车辆目标。S3-1: Use the road vehicle tracking method based on multi-feature space fusion, the vehicle tracking method based on target feature sensitivity and deep learning, or other vehicle target tracking methods for re-tracking and detection of vehicles to obtain real-time detection of vehicle targets.
S3-2:提取实时检测车辆目标的特征信息,将实时检测车辆目标的特征信息作为注意力机制的查询Q。S3-2: Extract the feature information of the real-time detected vehicle target, and use the feature information of the real-time detected vehicle target as the query Q of the attention mechanism.
S3-3:对记忆序列中的位置信息和特征信息分别进行平均池化,将平均池化后的键值对作为注意力机制的键值信息(K,V)。在当前时刻,若记忆缓存模块中存储了N个追踪目标的时空状态信息,将记忆缓存模块中的各个目标的不同时间步的状态信息进行平均池化,输出N个聚合了多时间步状态的目标记忆特征。该N个目标记忆特征作为注意力机制的键值信息(Ki,Vi),i=0,1,2,…,N。S3-3: Perform average pooling on the location information and feature information in the memory sequence, and use the average pooled key-value pairs as the key-value information (K, V) of the attention mechanism. At the current moment, if the space-time state information of N tracking targets is stored in the memory cache module, the state information of different time steps of each target in the memory cache module is pooled on average, and N aggregated multi-time step states are output. target memory features. The N target memory features are used as key-value information (K i , V i ) of the attention mechanism, i=0, 1, 2, . . . , N.
S3-4:使用注意力机制对查询Q和键值对(K,V)之间的关系进行建模,输出和查询Q最相关的加权键值A,注意力机制的具体实现采用transformer模型。S3-4: Use the attention mechanism to model the relationship between the query Q and the key-value pair (K, V), and output the weighted key value A most relevant to the query Q. The specific implementation of the attention mechanism uses the transformer model.
使用注意力机制计算加权键值A为:Use the attention mechanism to calculate the weighted key value A as:

其中,(Ki,Vi)表示平均池化后的键值对,Ki表示平均池化后的目标车辆的位置信息、Vi表示平均池化后的目标车辆的特征信息,或者Ki表示平均池化后的目标车辆的特征信息、Vi表示平均池化后的目标车辆的位置信息;i=0,1,2,…,N,N表示记忆序列中位置信息和特征信息的个数;α(Q,Ki)表示每个键值对的注意力概率分布,α函数使用softmax函数,α(Q,Ki)的计算方法为:Among them, (K i , V i ) represents the key-value pair after average pooling, K i represents the position information of the target vehicle after average pooling, V i represents the feature information of the target vehicle after average pooling, or K i Represents the feature information of the target vehicle after average pooling, V i represents the position information of the target vehicle after average pooling; i=0,1,2,...,N, N represents the number of position information and feature information in the memory sequence number; α(Q,K i ) represents the attention probability distribution of each key-value pair, the α function uses the softmax function, and the calculation method of α(Q,K i ) is:

其中,softmax()表示softmax函数,exp()表示指数函数;score(Q,Ki)表示标量评分,score函数将两个向量Q,K映射为标量评分,score(Q,Ki)的计算方法为:Among them, softmax() represents the softmax function, exp() represents the exponential function; score(Q,K i ) represents a scalar score, the score function maps two vectors Q, K to a scalar score, and the calculation of score(Q,K i ) The method is:

其中,d是Q的维度。where d is the dimension of Q.
S4:使用分类模型对所述加权键值进行分类,根据分类结果判断实时检测车辆目标中已出现过的车辆并与记忆序列中的目标车辆ID关联,实现对丢失目标车辆的重新跟踪。S4: Use the classification model to classify the weighted key values, and judge the vehicles that have appeared in the vehicle target in real time according to the classification results and associate them with the target vehicle ID in the memory sequence, so as to realize the re-tracking of the lost target vehicle.
使用前馈神经网络(Feedforward Neural Network,FNN)、逻辑回归分类或者支持向量机对所述加权键值A进行分类,分类模型输出class=FNN(A),FNN()表示前馈神经网络操作。分类结果分为两种类型:The weighted key value A is classified by using a feedforward neural network (Feedforward Neural Network, FNN), logistic regression classification or support vector machine, and the classification model outputs class=FNN(A), and FNN() represents a feedforward neural network operation. Classification results are divided into two types:
当分类模型输出class=0,表明当前A所对应的实时检测车辆目标的特征和记忆序列中存储的各个目标特征信息相关性低,A所对应的实时检测车辆目标第一次出现在视频上下文中。此时给该实时检测车辆目标分配新的ID。When the classification model outputs class=0, it indicates that the characteristics of the real-time detected vehicle target corresponding to A and the feature information of each target stored in the memory sequence have low correlation, and the real-time detected vehicle target corresponding to A appears in the video context for the first time . At this time, assign a new ID to the real-time detected vehicle target.
当分类模型输出class=1,表明当前A所对应的实时检测车辆目标的特征和记忆序列中存储的某个目标特征信息相关性高,A所对应的实时检测车辆目标第二次出现在视频上下文中。此时进一步输出与其相关性最高的记忆目标的ID,恢复其身份,具体为:When the classification model outputs class=1, it indicates that the characteristics of the real-time detected vehicle target corresponding to A are highly correlated with a certain target feature information stored in the memory sequence, and the real-time detected vehicle target corresponding to A appears in the video context for the second time middle. At this time, further output the ID of the memory target with the highest correlation with it, and restore its identity, specifically:
获取此时的加权键值A对应的实时检测车辆目标的特征Q,计算实时检测车辆目标的特征Q与记忆序列中存储的目标特征的平均池化输出K的相似度:
实施例二Embodiment two
参照图2、图3所示,本发明还公开了一种车辆跟踪系统,包括车辆目标检测模块、车辆目标跟踪模块、特征提取模块、记忆缓存模块和重跟踪模块。Referring to Fig. 2 and Fig. 3, the present invention also discloses a vehicle tracking system, which includes a vehicle object detection module, a vehicle object tracking module, a feature extraction module, a memory cache module and a retracking module.
所述车辆目标检测模块读取目标车辆的跟踪视频,逐帧抽取跟踪视频得到帧序列,提取帧序列中初始帧图像中目标车辆的初始跟踪坐标信息并传送给所述车辆目标跟踪模块。The vehicle target detection module reads the tracking video of the target vehicle, extracts the tracking video frame by frame to obtain a frame sequence, extracts the initial tracking coordinate information of the target vehicle in the initial frame image in the frame sequence and sends it to the vehicle target tracking module.
所述车辆目标跟踪模块根据所述目标车辆的初始跟踪坐标信息对帧序列中的其余帧图像进行跟踪,得到目标车辆在其余帧中的位置信息并传送给所述记忆缓存模块;车辆目标跟踪模块输入上一帧中目标的跟踪位置信息和当前帧的图像进行跟踪,并输出上一帧中的目标在当前帧的跟踪结果。一方面,跟踪结果作为跟踪任务的最终输出;另一方面,将跟踪框内像素信息经过特征提取模块提取当前帧的目标特征之后,和当前帧中该目标的跟踪位置信息一起存储到记忆缓存模块中,供检测阶段的重跟踪模块使用。The vehicle target tracking module tracks the remaining frame images in the frame sequence according to the initial tracking coordinate information of the target vehicle, obtains the position information of the target vehicle in the remaining frames and sends it to the memory cache module; the vehicle target tracking module Input the tracking position information of the target in the previous frame and the image of the current frame for tracking, and output the tracking result of the target in the previous frame in the current frame. On the one hand, the tracking result is the final output of the tracking task; on the other hand, after the pixel information in the tracking frame is extracted by the feature extraction module to extract the target features of the current frame, it is stored in the memory cache module together with the tracking position information of the target in the current frame , used by the re-tracking module in the detection phase.
所述特征提取模块提取其余帧中目标车辆的特征信息并传送给所述记忆缓存模块。The feature extraction module extracts the feature information of the target vehicle in the remaining frames and sends it to the memory cache module.
所述记忆缓存模块给目标车辆分配唯一的ID,存储目标车辆的ID、位置信息和特征信息作为记忆序列。具体地,以键值对的形式存储相关信息,其中键名为跟踪目标的ID信息,键值为一个队列,队列元素为按照时间顺序存放各个时间步下该目标的位置信息和特征信息,其中特征信息由特征提取模块生成。此外,记忆缓存模块只存储固定数量的时间步信息,基于队列采用“先进先出”结构实现,当存储时间步数量达到最大值时,最先进入记忆缓存模块的信息被丢掉。The memory cache module assigns a unique ID to the target vehicle, and stores the ID, position information and feature information of the target vehicle as a memory sequence. Specifically, relevant information is stored in the form of key-value pairs, where the key name is the ID information of the tracking target, the key value is a queue, and the queue elements store the position information and feature information of the target at each time step in chronological order, where Feature information is generated by feature extraction module. In addition, the memory cache module only stores a fixed number of time step information, which is implemented based on the "first in first out" structure based on the queue. When the number of stored time steps reaches the maximum value, the information that first enters the memory cache module is discarded.
所述重跟踪模块进行车辆的重新跟踪检测获取实时检测车辆目标,结合记忆序列和实时检测车辆目标使用注意力机制计算加权键值;使用分类模型对所述加权键值进行分类,根据分类结果判断实时检测车辆目标中已出现过的车辆并与记忆序列中的目标车辆关联,实现对丢失目标车辆的重新跟踪。在目标丢失后如果又重新被检测到,在视频上下文内联系前后目标的对应关系,使得同一目标继续保持唯一的ID。即在实时检测阶段,对于每一个被检测到的目标,可以判别所述检测目标是首次出现在视频上下文中还是跟踪中断后重新出现在上下文中。对于前者,赋予检测目标一个新的ID;对于后者,把检测目标恢复到之前对应跟踪目标的ID。The re-tracking module performs re-tracking detection of the vehicle to obtain real-time detection of vehicle targets, and uses the attention mechanism to calculate weighted key values in combination with the memory sequence and real-time detection of vehicle targets; uses a classification model to classify the weighted key values, and judges according to the classification results Real-time detection of vehicles that have appeared in the vehicle target and correlate with the target vehicle in the memory sequence to realize the re-tracking of the lost target vehicle. After the target is lost, if it is detected again, the corresponding relationship of the target before and after is linked in the video context, so that the same target continues to maintain a unique ID. That is, in the real-time detection stage, for each detected target, it can be judged whether the detected target appears in the video context for the first time or reappears in the context after the tracking is interrupted. For the former, a new ID is assigned to the detection target; for the latter, the detection target is restored to the previous ID corresponding to the tracking target.
本发明的上述技术方案相比现有技术具有以下优点:The above technical solution of the present invention has the following advantages compared with the prior art:
1、本发明通过记录跟踪目标车辆的记忆序列,并在跟踪目标丢失后根据记忆序列将重新出现的检测目标与跟踪目标关联,实现了对丢失目标车辆的重新跟踪。即使跟踪目标由于被遮挡或尺度变化等而丢失,只要后续重新出现并被检测到,就能够将视频上下文内跟踪中断的目标相互联系,从而恢复该跟踪目标的身份ID;相应地,首次出现的目标也可以被判断出来,不会和已经出现过的目标相混合,提升了整体跟踪过程的鲁棒性。1. The present invention realizes the re-tracking of the lost target vehicle by recording the memory sequence of the tracking target vehicle and associating the reappearing detection target with the tracking target according to the memory sequence after the tracking target is lost. Even if the tracking target is lost due to occlusion or scale change, as long as it reappears and is detected later, the tracking interrupted target in the video context can be connected to each other, thereby restoring the identity ID of the tracking target; correspondingly, the first appearing The target can also be judged and will not be mixed with the target that has already appeared, which improves the robustness of the overall tracking process.
2、在根据记忆序列将重新出现的检测目标与跟踪目标关联时,使用注意力机制和分类模型实现对检测目标与跟踪目标的关联,可以有效利用两者间的联系,匹配准确性高,从而提升重新跟踪的准确率。2. When associating the reappearing detection target with the tracking target according to the memory sequence, use the attention mechanism and classification model to realize the association between the detection target and the tracking target, which can effectively use the connection between the two, and the matching accuracy is high, so that Improve re-tracking accuracy.
3、记忆序列存储各个时间步跟踪结果的信息,记忆序列的结构简单、存储要求低,可以在实现重新跟踪的同时降低存储要求。3. The memory sequence stores the information of the tracking results of each time step. The memory sequence has a simple structure and low storage requirements, which can reduce storage requirements while realizing re-tracking.
4、在车辆跟踪过程中,通过记忆序列和重新跟踪的配合,在默认车辆跟踪模型存在跟踪失败的前提下可以在跟踪失败之后重新捕获丢失的目标,提升了整个追踪过程的鲁棒性,使得本发明可以接受不完美的车辆跟踪模型,应用领域更加广泛。4. In the process of vehicle tracking, through the cooperation of memory sequence and re-tracking, under the premise of tracking failure in the default vehicle tracking model, the lost target can be recaptured after tracking failure, which improves the robustness of the entire tracking process, making The invention can accept imperfect vehicle tracking models and has wider application fields.
本领域内的技术人员应明白,本申请的实施例可提供为方法、系统、或计算机程序产品。因此,本申请可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本申请可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、CD-ROM、光学存储器等)上实施的计算机程序产品的形式。Those skilled in the art should understand that the embodiments of the present application may be provided as methods, systems, or computer program products. Accordingly, the present application may take the form of an entirely hardware embodiment, an entirely software embodiment, or an embodiment combining software and hardware aspects. Furthermore, the present application may take the form of a computer program product embodied on one or more computer-usable storage media (including but not limited to disk storage, CD-ROM, optical storage, etc.) having computer-usable program code embodied therein.
本申请是参照根据本申请实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。The present application is described with reference to flowcharts and/or block diagrams of methods, apparatus (systems), and computer program products according to embodiments of the present application. It should be understood that each procedure and/or block in the flowchart and/or block diagram, and a combination of procedures and/or blocks in the flowchart and/or block diagram can be realized by computer program instructions. These computer program instructions may be provided to a general purpose computer, special purpose computer, embedded processor, or processor of other programmable data processing equipment to produce a machine such that the instructions executed by the processor of the computer or other programmable data processing equipment produce a An apparatus for realizing the functions specified in one or more procedures of the flowchart and/or one or more blocks of the block diagram.
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。These computer program instructions may also be stored in a computer-readable memory capable of directing a computer or other programmable data processing apparatus to operate in a specific manner, such that the instructions stored in the computer-readable memory produce an article of manufacture comprising instruction means, the instructions The device realizes the function specified in one or more procedures of the flowchart and/or one or more blocks of the block diagram.
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。These computer program instructions can also be loaded onto a computer or other programmable data processing device, causing a series of operational steps to be performed on the computer or other programmable device to produce a computer-implemented process, thereby The instructions provide steps for implementing the functions specified in the flow chart or blocks of the flowchart and/or the block or blocks of the block diagrams.
显然,上述实施例仅仅是为清楚地说明所作的举例,并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引申出的显而易见的变化或变动仍处于本发明创造的保护范围之中。Apparently, the above-mentioned embodiments are only examples for clear description, and are not intended to limit the implementation. For those of ordinary skill in the art, on the basis of the above description, other changes or changes in various forms can also be made. It is not necessary and impossible to exhaustively list all the implementation manners here. However, the obvious changes or changes derived therefrom are still within the scope of protection of the present invention.
Claims (10)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211627746.6A CN115797410B (en) | 2022-12-16 | 2022-12-16 | Vehicle tracking method and system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211627746.6A CN115797410B (en) | 2022-12-16 | 2022-12-16 | Vehicle tracking method and system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN115797410A true CN115797410A (en) | 2023-03-14 |
| CN115797410B CN115797410B (en) | 2025-11-28 |
Family
ID=85425534
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211627746.6A Active CN115797410B (en) | 2022-12-16 | 2022-12-16 | Vehicle tracking method and system |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115797410B (en) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN119672364A (en) * | 2024-11-20 | 2025-03-21 | 西安电子科技大学广州研究院 | Target object tracking method, device and computer equipment |
| CN119832027A (en) * | 2025-03-18 | 2025-04-15 | 南京信息工程大学 | Foreground target tracking method and system based on re-tracking strategy |
| CN119888638A (en) * | 2023-10-25 | 2025-04-25 | 北京君正集成电路股份有限公司 | Method for judging whether near vehicle moves in vehicle movement detection |
| CN119888636A (en) * | 2023-10-25 | 2025-04-25 | 北京君正集成电路股份有限公司 | Method for judging whether remote vehicle moves or not in vehicle motion detection |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20210150349A1 (en) * | 2019-11-15 | 2021-05-20 | Waymo Llc | Multi object tracking using memory attention |
| WO2021232589A1 (en) * | 2020-05-21 | 2021-11-25 | 平安国际智慧城市科技股份有限公司 | Intention identification method, apparatus and device based on attention mechanism, and storage medium |
| CN113963168A (en) * | 2021-11-15 | 2022-01-21 | 北京联合大学 | An improved high-accuracy end-to-end vehicle multi-target tracking method |
| CN114241053A (en) * | 2021-12-31 | 2022-03-25 | 北京工业大学 | FairMOT multi-class tracking method based on improved attention mechanism |
-
2022
- 2022-12-16 CN CN202211627746.6A patent/CN115797410B/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20210150349A1 (en) * | 2019-11-15 | 2021-05-20 | Waymo Llc | Multi object tracking using memory attention |
| WO2021232589A1 (en) * | 2020-05-21 | 2021-11-25 | 平安国际智慧城市科技股份有限公司 | Intention identification method, apparatus and device based on attention mechanism, and storage medium |
| CN113963168A (en) * | 2021-11-15 | 2022-01-21 | 北京联合大学 | An improved high-accuracy end-to-end vehicle multi-target tracking method |
| CN114241053A (en) * | 2021-12-31 | 2022-03-25 | 北京工业大学 | FairMOT multi-class tracking method based on improved attention mechanism |
Non-Patent Citations (3)
| Title |
|---|
| PEIZE SUN等: "TransTrack: Multiple Object Tracking with Transformer", ARXIV, 31 December 2020 (2020-12-31) * |
| TIM MEINHARDT等: "TrackFormer: Multi-Object Tracking with Transformers", ARXIV, 7 January 2021 (2021-01-07) * |
| ZIANG CAO等: "TCTrack: Temporal Contexts for Aerial Tracking", ARXIV, 3 March 2022 (2022-03-03) * |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN119888638A (en) * | 2023-10-25 | 2025-04-25 | 北京君正集成电路股份有限公司 | Method for judging whether near vehicle moves in vehicle movement detection |
| CN119888636A (en) * | 2023-10-25 | 2025-04-25 | 北京君正集成电路股份有限公司 | Method for judging whether remote vehicle moves or not in vehicle motion detection |
| CN119672364A (en) * | 2024-11-20 | 2025-03-21 | 西安电子科技大学广州研究院 | Target object tracking method, device and computer equipment |
| CN119832027A (en) * | 2025-03-18 | 2025-04-15 | 南京信息工程大学 | Foreground target tracking method and system based on re-tracking strategy |
| CN119832027B (en) * | 2025-03-18 | 2025-05-27 | 南京信息工程大学 | Foreground target tracking method and system based on re-tracking strategy |
Also Published As
| Publication number | Publication date |
|---|---|
| CN115797410B (en) | 2025-11-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Wang et al. | Track without appearance: Learn box and tracklet embedding with local and global motion patterns for vehicle tracking | |
| CN115797410A (en) | A vehicle tracking method and system | |
| CN112750150B (en) | Vehicle flow statistical method based on vehicle detection and multi-target tracking | |
| CN116402850B (en) | A Multi-Target Tracking Method for Intelligent Driving | |
| CN108875548B (en) | Character track generation method and device, storage medium and electronic equipment | |
| CN112906483B (en) | Target re-identification method, device and computer readable storage medium | |
| CN104615986B (en) | The method that pedestrian detection is carried out to the video image of scene changes using multi-detector | |
| CN112200131B (en) | A vehicle collision detection method based on vision, intelligent terminal and storage medium | |
| CN102609720B (en) | Pedestrian detection method based on position correction model | |
| WO2022142918A1 (en) | Multi-target tracking system and method | |
| CN109993061A (en) | A kind of human face detection and tracing method, system and terminal device | |
| CN109448027B (en) | Adaptive and persistent moving target identification method based on algorithm fusion | |
| CN112738470A (en) | A method of parking detection in expressway tunnel | |
| KR20220076398A (en) | Object recognition processing apparatus and method for ar device | |
| CN118570255B (en) | Method, device, computer equipment and storage medium for detecting and tracking moving targets | |
| CN114663977A (en) | Long-time span video image pedestrian monitoring accurate tracking method | |
| CN106127766B (en) | Method for tracking target based on Space Coupling relationship and historical models | |
| CN110610120A (en) | A face trajectory matching method | |
| Zhang et al. | A comparative analysis of object detection algorithms in naturalistic driving videos | |
| NGENI et al. | Multiple object tracking (Mot) of vehicles to solve vehicle occlusion problems using deepsort and quantum computing | |
| CN114463669A (en) | Target snapshot method and device and computer readable storage medium | |
| CN113724291A (en) | Multi-panda tracking method, system, terminal equipment and readable storage medium | |
| CN120182377A (en) | A dynamic real-time positioning and mapping method based on 3D Gaussian | |
| CN111160190B (en) | Vehicle-mounted pedestrian detection-oriented classification auxiliary kernel correlation filtering tracking method | |
| WO2013128839A1 (en) | Image recognition system, image recognition method and computer program |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |