CN115790579A - A deep sea underwater unmanned vehicle inertial navigation method, system, equipment and medium - Google Patents
A deep sea underwater unmanned vehicle inertial navigation method, system, equipment and medium Download PDFInfo
- Publication number
- CN115790579A CN115790579A CN202211421803.5A CN202211421803A CN115790579A CN 115790579 A CN115790579 A CN 115790579A CN 202211421803 A CN202211421803 A CN 202211421803A CN 115790579 A CN115790579 A CN 115790579A
- Authority
- CN
- China
- Prior art keywords
- navigation
- navigation system
- inertial navigation
- calibration
- underwater
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images











Landscapes
- Navigation (AREA)
Abstract
本发明涉及UUV导航技术领域,尤其涉及一种深海水下无人航行器惯导方法、系统、设备及介质,包括:在组合导航系统自检通过后,布放水下无人航行器,并利用卫星定位装置输出的位置信息初始对准,检测光纤惯性导航系统是否接收到标定指令,若未接收到标定指令,则在光纤惯性导航系统初始对准成功后,进入仅执行任务工况,并获取导航参数最优估计;若接收到标定指令,则在光纤惯性导航系统初始对准成功后,根据水下无人航行器是否需要执行任务,分别进入标定与执行任务工况或者进入仅标定工况。本发明通过划分仅执行任务、标定后执行任务和仅需标定三种情况,解决了大深度UUV从布放、水下执行任务到回收全过程中INS的工作时序问题。

The present invention relates to the field of UUV navigation technology, in particular to a method, system, equipment and medium for deep-sea underwater unmanned vehicle inertial navigation. Initially align the position information output by the satellite positioning device, and check whether the fiber optic inertial navigation system has received the calibration command. Optimal estimation of navigation parameters; if the calibration instruction is received, after the initial alignment of the fiber optic inertial navigation system is successful, according to whether the underwater unmanned vehicle needs to perform tasks, it will enter the calibration and task execution mode or the calibration only mode. . The present invention solves the problem of the working sequence of the INS in the whole process from deployment, underwater task execution to recovery of large-depth UUVs by dividing the three situations of only performing tasks, performing tasks after calibration and only requiring calibration.
Description
技术领域technical field
本发明涉及UUV导航技术领域,尤其涉及一种深海水下无人航行器惯导方法、系统、设备及介质。The invention relates to the technical field of UUV navigation, in particular to an inertial navigation method, system, equipment and medium for a deep-sea underwater unmanned vehicle.
背景技术Background technique
目前,大多数水下无人航行器(unmanned underwater vehicle,UUV)都搭载基于光纤/激光陀螺的惯性导航系统(inertial navigation system,INS),由于UUV的下潜深度一般不超过1000m,因此,惯性导航系统采用的导航方法较简单,通常采用INS和多普勒测速仪(doppler velocity log,DVL)或者INS和卫星定位系统(global navigation satellitesystem,GNSS)组合的方法。At present, most unmanned underwater vehicles (UUV) are equipped with an inertial navigation system (INS) based on optical fiber/laser gyro. Since the diving depth of UUV generally does not exceed 1000m, the inertial The navigation method adopted by the navigation system is relatively simple, usually using a combination of INS and Doppler velocity log (DVL) or INS and a global navigation satellite system (GNSS).
然而,GNSS信息只有UUV上浮出水面或水面附近才能接收到,对于潜深超过1000m的大深度UUV不适用,现有INS导航方法也不适用于大深度UUV,比如:当工作深度超过6000米时,对UUV的导航精度等方面的要求会更加严苛。However, GNSS information can only be received when the UUV is surfaced or near the water surface. It is not applicable to large-depth UUVs with a diving depth of more than 1000m, and the existing INS navigation method is not suitable for large-depth UUVs. For example: when the working depth exceeds 6000 meters , the requirements for UUV navigation accuracy and other aspects will be more stringent.
发明内容Contents of the invention
本发明提供了一种深海水下无人航行器惯导方法、系统、设备及介质,解决的技术问题是,传统的搭载惯性导航系统得水下无人航行器无法适用于深层海域,且导航精度差。The invention provides an inertial navigation method, system, equipment and medium for deep-sea underwater unmanned vehicles. Poor accuracy.
为解决以上技术问题,本发明提供了一种深海水下无人航行器惯导方法、系统、设备及介质。In order to solve the above technical problems, the present invention provides an inertial navigation method, system, equipment and medium for deep sea underwater unmanned vehicles.
第一方面,本发明提供了一种深海水下无人航行器惯导方法,应用安装在水下无人航行器上的组合导航系统,所述组合导航系统包括光纤惯性导航系统、卫星定位装置、多普勒测速仪和深度计,所述卫星定位装置包括卫星定位接收机和水声定位系统,所述方法包括以下步骤:In the first aspect, the present invention provides a deep-sea underwater unmanned vehicle inertial navigation method, which uses an integrated navigation system installed on the underwater unmanned vehicle. The integrated navigation system includes an optical fiber inertial navigation system and a satellite positioning device. , Doppler velocimeter and depth gauge, described satellite positioning device comprises satellite positioning receiver and hydroacoustic positioning system, and described method comprises the following steps:
对组合导航系统进行自检,并在自检通过后,布放水下无人航行器;Conduct self-inspection on the integrated navigation system, and deploy the underwater unmanned vehicle after the self-inspection passes;
利用卫星定位装置输出的位置信息开始初始对准,并检测光纤惯性导航系统是否接收到标定指令,若未接收到标定指令,则在光纤惯性导航系统初始对准成功后,进入仅执行任务工况,完成组合导航;Use the position information output by the satellite positioning device to start the initial alignment, and check whether the optical fiber inertial navigation system has received the calibration command. If the calibration command is not received, after the initial alignment of the optical fiber inertial navigation system is successful, enter the task-only working condition , to complete the combined navigation;
若接收到标定指令,则在光纤惯性导航系统初始对准成功后,判断水下无人航行器是否需要执行任务,若需要执行任务,则进入标定与执行任务工况,完成组合导航;否则进入仅标定工况;If the calibration instruction is received, after the initial alignment of the fiber-optic inertial navigation system is successful, it is judged whether the underwater unmanned vehicle needs to perform a task. Calibration only;
在结束导航使命任务后,获取导航参数最优估计。After the navigation mission is finished, the optimal estimation of the navigation parameters is obtained.
在进一步的实施方案中,所述仅执行任务工况包括:In a further embodiment, the task-only operating conditions include:
接收卫星定位接收机的位置信息,并控制水下无人航行器到达预设下潜点;Receive the position information of the satellite positioning receiver, and control the underwater unmanned vehicle to reach the preset dive point;
利用卫星定位接收机的位置信息进行下潜点水面校准,在下潜点水面校准完成后,控制水下无人航行器开始下潜;Use the position information of the satellite positioning receiver to calibrate the water surface of the dive point, and control the underwater unmanned vehicle to start diving after the water surface calibration of the dive point is completed;
根据卫星定位装置的位置信息进行组合导航解算,以获取导航参数最优估计;Combined navigation calculation is performed according to the position information of the satellite positioning device to obtain the optimal estimation of navigation parameters;
在完成导航使命任务时,水下无人航行器上浮至水面并进行示位、回收,完成组合导航。When completing the navigation mission, the underwater unmanned vehicle floats to the surface of the water and performs position display and recovery to complete integrated navigation.
在进一步的实施方案中,所述仅标定工况包括:In a further embodiment, the only calibration conditions include:
利用卫星定位装置输出的位置信息和多普勒测速仪输出的速度信息对光纤惯性导航系统进行标定,并对光纤惯性导航系统进行水面二次对准;Use the position information output by the satellite positioning device and the speed information output by the Doppler velocimeter to calibrate the fiber optic inertial navigation system, and perform secondary alignment on the water surface for the fiber optic inertial navigation system;
在标定完成后,回收水下无人航行器。After the calibration is completed, the underwater unmanned vehicle is recovered.
在进一步的实施方案中,所述标定与执行任务工况包括:In a further embodiment, the calibration and task execution conditions include:
利用卫星定位装置输出的位置信息和多普勒测速仪输出的速度信息对光纤惯性导航系统进行标定,并在标定完成后,对光纤惯性导航系统进行水面二次对准;Use the position information output by the satellite positioning device and the speed information output by the Doppler velocimeter to calibrate the fiber optic inertial navigation system, and after the calibration is completed, perform secondary alignment on the water surface of the fiber optic inertial navigation system;
在二次对准结束后,接收卫星定位接收机的位置信息,并控制水下无人航行器到达预设下潜点;After the secondary alignment is completed, the position information of the satellite positioning receiver is received, and the underwater unmanned vehicle is controlled to reach the preset dive point;
利用卫星定位接收机的位置信息进行下潜点水面校准,在下潜点水面校准完成后,控制水下无人航行器开始下潜;Use the position information of the satellite positioning receiver to calibrate the water surface of the dive point, and control the underwater unmanned vehicle to start diving after the water surface calibration of the dive point is completed;
根据卫星定位装置的位置信息进行组合导航解算,以获取导航参数最优估计;Combined navigation calculation is performed according to the position information of the satellite positioning device to obtain the optimal estimation of navigation parameters;
在完成导航使命任务时,水下无人航行器上浮至水面并进行示位、回收,完成组合导航。When completing the navigation mission, the underwater unmanned vehicle floats to the surface of the water and performs position display and recovery to complete integrated navigation.
在进一步的实施方案中,所述根据卫星定位装置的位置信息进行组合导航解算,以获取导航参数最优估计的步骤包括:In a further embodiment, the step of performing integrated navigation calculation according to the position information of the satellite positioning device to obtain the optimal estimation of the navigation parameters includes:
采集组合导航系统输出的组合导航信息;其中,所述组合导航信息包括光纤惯性导航系统输出的角速度信息和加速度信息、水声定位系统输出的位置信息、多普勒测速仪输出的速度信息、深度计输出的深度信息;Collect the integrated navigation information output by the integrated navigation system; wherein, the integrated navigation information includes the angular velocity information and acceleration information output by the fiber optic inertial navigation system, the position information output by the underwater acoustic positioning system, the speed information output by the Doppler velocimeter, the depth The depth information output by the meter;
基于线性卡尔曼模型,利用组合导航信息对光纤惯性导航系统进行水下校准;Underwater calibration of fiber optic inertial navigation system using integrated navigation information based on linear Kalman model;
利用组合导航信息进行组合导航解算,并对组合导航系统误差进行修正,得到导航参数最优估计;其中,所述导航参数最优估计包括光纤惯性导航系统的实时速度、位置以及姿态。Using the integrated navigation information to perform integrated navigation calculation, and correct the error of the integrated navigation system to obtain the optimal estimation of navigation parameters; wherein, the optimal estimation of navigation parameters includes the real-time speed, position and attitude of the optical fiber inertial navigation system.
在进一步的实施方案中,在利用组合导航信息对光纤惯性导航系统进行水下校准时,组合导航系统的状态空间模型为:In a further embodiment, when using the integrated navigation information to calibrate the fiber optic inertial navigation system underwater, the state space model of the integrated navigation system is:

其中,in,

式中,Xk表示k时刻组合导航系统的n维状态向量;Φk,k-1表示从(k-1)时刻到k时刻的状态转移矩阵;Γk,k-1表示从(k-1)时刻到k时刻的噪声分配矩阵;Wk-1表示系统噪声向量;Zk表示k时刻的观测向量;Hk表示k时刻的观测矩阵;Vk表示k时刻的观测噪声向量;λUAPS表示水声定位系统输出的经度;LUAPS表示水声定位系统输出的纬度;hDG表示深度计输出的深度信息;λINS表示光纤惯性导航系统输出的经度;LINS表示光纤惯性导航系统输出的纬度;hINS表示光纤惯性导航系统输出的深度信息。In the formula, X k represents the n-dimensional state vector of the integrated navigation system at time k; Φ k, k-1 represents the state transition matrix from time (k-1) to time k; 1) Noise allocation matrix from time to time k; W k-1 represents the system noise vector; Z k represents the observation vector at time k; H k represents the observation matrix at time k; V k represents the observation noise vector at time k; λ UAPS Indicates the longitude output by the underwater acoustic positioning system; L UAPS indicates the latitude output by the underwater acoustic positioning system ; h DG indicates the depth information output by the depth gauge; λ INS indicates the longitude output by the optical fiber inertial navigation system; Latitude; h INS represents the depth information output by the fiber optic inertial navigation system.
在进一步的实施方案中,所述光纤惯性导航系统包括三轴光纤陀螺组合、石英挠性加速度计、I/F转换电流、直流电源、导航计算机和导航软件;In a further embodiment, the fiber optic inertial navigation system includes a three-axis fiber optic gyro combination, a quartz flexible accelerometer, an I/F conversion current, a DC power supply, a navigation computer and navigation software;
其中,导航计算机包括FPGA、DSP、ARM和电源模块,所述导航计算机用于通过两路RS422接口定时采集卫星定位装置输出的位置信息和多普勒测速仪输出的速度信息;Wherein, navigation computer comprises FPGA, DSP, ARM and power supply module, and described navigation computer is used for regularly collecting the position information that satellite positioning device outputs and the velocity information that Doppler speedometer outputs through two-way RS422 interface;
所述FPGA用于通过两路I/O隔离信号线和一路RS422接口接收光纤惯性导航系统和温度传感器输出的数字量信号,并触发DSP外部中断;The FPGA is used to receive the digital signal output by the optical fiber inertial navigation system and the temperature sensor through two I/O isolation signal lines and one RS422 interface, and trigger the DSP external interrupt;
所述DSP用于读取并利用FPGA采集的数字量信号进行导航解算,将解算后的导航参数最优估计通过中断方式返回至FPGA。The DSP is used to read and use the digital signal collected by the FPGA to perform navigation calculation, and return the optimal estimation of the navigation parameters after calculation to the FPGA through an interrupt.
第二方面,本发明提供了一种深海水下无人航行器惯导系统,所述系统包括:In a second aspect, the present invention provides a deep sea underwater unmanned vehicle inertial navigation system, the system comprising:
系统自检模块,用于对组合导航系统进行自检,并在自检通过后,布放水下无人航行器;The system self-inspection module is used for self-inspection of the integrated navigation system, and deploys the underwater unmanned vehicle after the self-inspection passes;
初始对准模块,用于利用卫星定位装置输出的位置信息开始初始对准,并检测光纤惯性导航系统是否接收到标定指令,若未接收到标定指令,则在光纤惯性导航系统初始对准成功后,进入仅执行任务工况,完成组合导航;The initial alignment module is used to use the position information output by the satellite positioning device to start initial alignment, and detect whether the optical fiber inertial navigation system has received a calibration instruction. If the calibration instruction is not received, the initial alignment of the optical fiber inertial navigation system is successful. , enter the task only execution mode, and complete the combined navigation;
任务判断模块,用于若接收到标定指令,则在光纤惯性导航系统初始对准成功后,判断水下无人航行器是否需要执行任务,若需要执行任务,则进入标定与执行任务工况,完成组合导航;否则进入仅标定工况;The task judging module is used to judge whether the underwater unmanned vehicle needs to perform a task after the initial alignment of the fiber optic inertial navigation system is successful if the calibration command is received, and if it needs to perform the task, enter the calibration and task execution mode, Complete the integrated navigation; otherwise, enter the calibration-only working condition;
数据输出模块,用于在结束导航使命任务后,获取导航参数最优估计。The data output module is used to obtain the optimal estimation of navigation parameters after the navigation mission is completed.
第三方面,本发明还提供了一种计算机设备,包括处理器和存储器,所述处理器与所述存储器相连,所述存储器用于存储计算机程序,所述处理器用于执行所述存储器中存储的计算机程序,以使得所述计算机设备执行实现上述方法的步骤。In a third aspect, the present invention also provides a computer device, including a processor and a memory, the processor is connected to the memory, the memory is used to store computer programs, and the processor is used to execute the program stored in the memory. A computer program, so that the computer device executes the steps to realize the above method.
第四方面,本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机程序,所述计算机程序被处理器执行时实现上述方法的步骤。In a fourth aspect, the present invention also provides a computer-readable storage medium, where a computer program is stored in the computer-readable storage medium, and when the computer program is executed by a processor, the steps of the above method are implemented.
本发明提供了一种深海水下无人航行器惯导方法、系统、设备及介质,所述方法通过划分仅执行任务、标定后执行任务和仅需标定三种情况,解决了大深度UUV从布放、水下执行任务到回收全过程中INS的工作时序问题。与现有技术相比,该方法提出了针对大深度UUV惯导的组合导航方案及其组合导航算法,并配置导航计算机设计方案,不仅考虑了大深度水下无人航行器导航,而且能够针对不同情况进行标定和执行任务;另外,本发明提供的导航计算机具有集成度高、体积小、功耗低等优点,提高了导航精度和对复杂环境的适应性,应用前景广阔。The present invention provides an inertial navigation method, system, equipment and medium for deep-sea underwater unmanned vehicles. The method solves the problem of large-depth UUV from The working timing of the INS in the whole process of deployment, underwater mission execution and recovery. Compared with the existing technology, this method proposes an integrated navigation scheme and integrated navigation algorithm for large-depth UUV inertial navigation, and configures a navigation computer design scheme, which not only considers the navigation of large-depth underwater unmanned vehicles, but also can target Calibrate and perform tasks in different situations; in addition, the navigation computer provided by the invention has the advantages of high integration, small size, low power consumption, etc., improves navigation accuracy and adaptability to complex environments, and has broad application prospects.
附图说明Description of drawings
图1是本发明实施例提供的深海水下无人航行器惯导方法流程示意图;Fig. 1 is a schematic flow chart of a deep sea underwater unmanned vehicle inertial navigation method provided by an embodiment of the present invention;
图2是本发明实施例提供的组合导航系统示意图;Fig. 2 is a schematic diagram of an integrated navigation system provided by an embodiment of the present invention;
图3是本发明实施例提供的导航计算机硬件结构示意图;Fig. 3 is a schematic diagram of the hardware structure of the navigation computer provided by the embodiment of the present invention;
图4是本发明实施例提供的INS仅执行任务工作时序示意图;Fig. 4 is a schematic diagram of the working sequence of the INS only executing tasks provided by the embodiment of the present invention;
图5是本发明实施例提供的INS仅标定工作时序示意图;Fig. 5 is a schematic diagram of the INS calibration-only working sequence provided by the embodiment of the present invention;
图6是本发明实施例提供的INS标定和执行任务工作时序示意图;Fig. 6 is a schematic diagram of the working sequence of INS calibration and task execution provided by the embodiment of the present invention;
图7是本发明实施例提供的组合导航系统的电气连接结构示意图;Fig. 7 is a schematic diagram of the electrical connection structure of the integrated navigation system provided by the embodiment of the present invention;
图8是本发明实施例提供的INS工作流程示意图;Fig. 8 is a schematic diagram of an INS workflow provided by an embodiment of the present invention;
图9是本发明实施例提供的INS惯导组合导航原理图;Fig. 9 is a schematic diagram of the INS inertial navigation integrated navigation provided by the embodiment of the present invention;
图10是本发明实施例提供的INS组合导航流程图;Fig. 10 is a flow chart of INS integrated navigation provided by the embodiment of the present invention;
图11是本发明实施例提供的深海水下无人航行器惯导系统框图;Fig. 11 is a block diagram of an inertial navigation system for a deep-sea underwater unmanned vehicle provided by an embodiment of the present invention;
图12是本发明实施例提供的计算机设备的结构示意图。Fig. 12 is a schematic structural diagram of a computer device provided by an embodiment of the present invention.
具体实施方式Detailed ways
下面结合附图具体阐明本发明的实施方式,实施例的给出仅仅是为了说明目的,并不能理解为对本发明的限定,包括附图仅供参考和说明使用,不构成对本发明专利保护范围的限制,因为在不脱离本发明精神和范围基础上,可以对本发明进行许多改变。The embodiment of the present invention will be explained in detail below in conjunction with the accompanying drawings. The examples given are only for the purpose of illustration, and cannot be interpreted as limiting the present invention. The accompanying drawings are only for reference and description, and do not constitute the scope of patent protection of the present invention. limitations, since many changes may be made in the invention without departing from the spirit and scope of the invention.
参考图1,本发明实施例提供了一种深海水下无人航行器惯导方法,如图1所示,所述方法包括以下步骤:Referring to Fig. 1, an embodiment of the present invention provides a deep sea underwater unmanned vehicle inertial navigation method, as shown in Fig. 1, the method includes the following steps:
S1.对组合导航系统进行自检,并在自检通过后,布放水下无人航行器。S1. Perform self-inspection on the integrated navigation system, and deploy the underwater unmanned vehicle after the self-inspection passes.
在本实施例中,组合导航系统操控水下无人航行器进行上电,并在对组合导航系统中的光纤惯性导航系统(INS)、卫星定位装置(GNSS)、多普勒测速仪(DVL)分别自检后,在岸边或母船上布放水下无人航行器(UUV),当UUV被布放岸边水面后,在水面漂浮状态下进行初始对准;当在母船上进行布放时,UUV由母船运载前往预定海域,到达后母船处于漂浮状态,在母船上进行初始对准。In this embodiment, the integrated navigation system controls the underwater unmanned vehicle to be powered on, and the optical fiber inertial navigation system (INS), satellite positioning device (GNSS), Doppler velocimeter (DVL) in the integrated navigation system ) after self-inspection respectively, deploy the underwater unmanned vehicle (UUV) on the shore or on the mother ship. , the UUV is carried by the mother ship to the predetermined sea area. After arriving, the mother ship is in a floating state, and the initial alignment is performed on the mother ship.
如图2所示,本实施例应用的深海水下无人航行器包括安装在水下无人航行器上的组合导航系统,所述组合导航系统包括光纤惯性导航系统(INS)、卫星定位装置(GNSS)、多普勒测速仪(DVL)、深度计和上位机;其中,光纤惯性导航系统是整个组合导航系统的中枢和核心,所述光纤惯性导航系统包括三轴光纤陀螺组合、石英挠性加速度计、I/F转换电流、直流电源、导航计算机和导航软件;所述卫星定位装置包括卫星定位接收机和水声定位系统,在本实施例中,卫星定位系统(global navigation satellite system,GNSS)和多普勒测速仪(doppler velocity log,DVL)可以选用成熟的货架产品,同时考虑到未来兼容北斗卫星导航方案,选用兼容北斗/GPS的卫星导航芯片作为定位信息参考。As shown in Figure 2, the deep-sea underwater unmanned vehicle applied in this embodiment includes an integrated navigation system installed on the underwater unmanned vehicle, and the integrated navigation system includes a fiber optic inertial navigation system (INS), a satellite positioning device (GNSS), Doppler velocimeter (DVL), depth gauge and host computer; among them, the fiber optic inertial navigation system is the center and core of the entire integrated navigation system, and the fiber optic inertial navigation system includes a three-axis fiber optic gyro combination, a quartz Accelerometer, I/F conversion current, DC power supply, navigation computer and navigation software; Described satellite positioning device comprises satellite positioning receiver and hydroacoustic positioning system, in the present embodiment, satellite positioning system (global navigation satellite system, GNSS) and Doppler Velocity Log (DVL) can choose mature off-the-shelf products. At the same time, considering the future compatibility with Beidou satellite navigation solutions, choose a Beidou/GPS-compatible satellite navigation chip as a reference for positioning information.
其中,如图3所示,导航计算机包括FPGA、DSP、ARM、晶振、JTAG、SDRAM、FLASH和电源模块,需要说明的是,传统的计算机硬件都是采用FPGA、DSP和FLASH组合的硬件结构,而本实施例采用的是FPGA、DSP、ARM、DDR和2个FLASH组合的硬件结构,本实施例的硬件结构在数据处理效率、处理速度、读取和存储速度、存储的可靠性、存储容量等性能指标上都有所提升,本实施例提供的导航计算机硬件结构功能说明如下:Among them, as shown in Figure 3, the navigation computer includes FPGA, DSP, ARM, crystal oscillator, JTAG, SDRAM, FLASH and power supply module. It should be noted that traditional computer hardware adopts the hardware structure of FPGA, DSP and FLASH combination. And what this embodiment adopts is the hardware structure that FPGA, DSP, ARM, DDR and 2 FLASHs combine, the hardware structure of this embodiment is in the reliability of data processing efficiency, processing speed, reading and storage speed, storage, storage capacity. And other performance indicators have been improved, and the hardware structure and functions of the navigation computer provided by this embodiment are described as follows:
(1)通过两路RS422接口定时采集卫星定位装置(GPS/北斗二合一)和多普勒测速仪(DVL)数字量信号;(1) Timely collect digital signals of satellite positioning device (GPS/Beidou 2 in 1) and Doppler Velocimeter (DVL) through two RS422 interfaces;
(2)通过两路I/O隔离信号线和一路RS422接口接收惯性测量单元IMU(包括三个陀螺、三个加速度计、一个温度传感器)的数字量信号;(2) Receive the digital signal of the inertial measurement unit IMU (including three gyroscopes, three accelerometers, and one temperature sensor) through two I/O isolation signal lines and one RS422 interface;
(3)扩展板用于外部惯导源的信息采集和打包传输,核心板用于外部信号(外部惯导源和外部信息源)接收和处理(包括初始对准、导航参数解算和组合导航等),并将处理处的导航信息通过串口输出给载体;(3) The expansion board is used for information collection and packaged transmission of external inertial navigation sources, and the core board is used for receiving and processing external signals (external inertial navigation sources and external information sources) (including initial alignment, navigation parameter calculation and integrated navigation, etc.) , and output the navigation information at the processing location to the carrier through the serial port;
(4)具备外部惯导源的原始数据、外部信息源的原始数据、解算出的导航信息数据的存储与下载功能;FPGA采集传感器的输出数据(包括三个陀螺、三个加速度计和温度传感器的数据)并经过预处理得到原始数据后,给DSP发送中断等指令让DSP读取该数据,DSP从FPGA中读取原始数据并存储在DDR2(临时存储)中,ARM读取DDR2中DE1原始数据并存储在FLASH-1(永久存储)中,DSP利用原始数据进行导航解算,将得到的导航信息存储在同步动态随机存储器中,并由ARM将其存储在FLASH-1中,各个存储器存储的内容具体为:FLASH-1存储DSP和ARM中运行的程序、原始数据、指令信息、导航信息,DDR2用于临时存储原始数据和导航信息,FLASH-2存储FPGA中运行的程序,网口用于更新程序、下载原始数据、指令信息和导航信息;(4) It has the storage and download functions of the original data of the external inertial navigation source, the original data of the external information source, and the navigation information data calculated; data) and get the original data after preprocessing, send interrupt and other instructions to DSP to let DSP read the data, DSP reads the original data from FPGA and stores it in DDR2 (temporary storage), ARM reads DE1 original data in DDR2 And stored in FLASH-1 (permanent storage), DSP uses the original data to perform navigation calculations, stores the obtained navigation information in the synchronous dynamic random access memory, and stores it in the FLASH-1 by the ARM, and the information stored in each memory The specific content is: FLASH-1 stores programs running in DSP and ARM, raw data, instruction information, and navigation information, DDR2 is used to temporarily store raw data and navigation information, FLASH-2 stores programs running in FPGA, and the network port is used for Update programs, download raw data, instruction information and navigation information;
(5)电源电压:电源模块将输入的28V电压转换成各个模块所需的电源电压,主要有以下电压:+5V、±5V和±15V,核心板和扩展板输入+5V电压,并由各自板上的电源管理电路转换成所需的电压;激光陀螺、加速度计和温度传感器所需电压分别为±5V、±15V和+5V;(5) Power supply voltage: The power supply module converts the
(6)DSP、ARM和FPGA芯片通过JTAG接口和网口进行调试。(6) DSP, ARM and FPGA chips are debugged through JTAG interface and network port.
需要说明的是,在图3中,虚线框中的“调试计算机”表示只在岸上调试或下载数据时需要连接的设备,载体在水下工作时不需要调试导航计算机。It should be noted that in Figure 3, the "debugging computer" in the dotted box indicates the equipment that needs to be connected only when debugging or downloading data on the shore, and the navigation computer does not need to be debugged when the carrier is working underwater.
在本实施例中,导航软件是组合导航系统的重要组成部分,软件的宿主计算机电路为导航计算机,导航软件固化在计算机的Flash内,计算机通电后将导航软件加载到SRAM内运行,导航软件用于实现组合导航的内部时序管理、光纤陀螺仪和加速度计的数据采集、误差模型计算、导航解算、与舰载计算机或测试设备通讯等功能,导航软件的功能说明如下:In this embodiment, the navigation software is an important part of the integrated navigation system. The host computer circuit of the software is a navigation computer, and the navigation software is solidified in the Flash of the computer. The functions of the navigation software are as follows:
a)导航计算机电路的初始化;组合导航加电启动后,软件要完成导航计算机电路的初始化,包括:DSP的各项配置、光纤陀螺通讯口的初始化、UUV等载体上通讯口的初始化、定时器设置等。a) Initialization of the navigation computer circuit; after the combined navigation is powered on, the software must complete the initialization of the navigation computer circuit, including: various configurations of DSP, initialization of the communication port of the fiber optic gyroscope, initialization of the communication port on UUV and other carriers, and timers settings etc.
b)数据采集;数据采集周期为5ms,软件采集的数据包括三个光纤陀螺仪、三个石英挠性加速度计数据。b) Data collection; the data collection period is 5ms, and the data collected by the software includes data from three fiber optic gyroscopes and three quartz flexible accelerometers.
c)误差模型补偿计算;导航软件完成数据采集后,按照误差补偿模型进行计算,得到本周期的角增量、速度增量。c) Error model compensation calculation: After the navigation software completes data collection, it calculates according to the error compensation model to obtain the angle increment and speed increment of this cycle.
d)完成导航解算;软件根据导航解算算法以及姿态修正算法完成姿态的实时更新,同时完成相应姿态的角速率计算。d) Complete the navigation calculation; the software completes the real-time update of the attitude according to the navigation calculation algorithm and the attitude correction algorithm, and at the same time completes the calculation of the angular rate of the corresponding attitude.
e)与载体的综控计算机、测试设备通讯;组合导航与载体综控计算机、测试系统的通讯模式为双向,组合导航根据雷上计算机或测试设备不同的数据请求而采取不同的数据发送方式。e) Communication with the comprehensive control computer and test equipment of the carrier; the communication mode between the integrated navigation and the comprehensive control computer and test system of the carrier is two-way, and the integrated navigation adopts different data transmission methods according to different data requests from the mine computer or test equipment.
f)程序及参数更新;导航软件能够实现软件的在线升级和误差补偿参数的更新,通过通讯口接收测试系统发送的文件,将文件写入Flash,实现导航软件的在线升级或参数更新。f) Program and parameter update; the navigation software can realize the online upgrade of the software and the update of the error compensation parameters, receive the file sent by the test system through the communication port, write the file into Flash, and realize the online upgrade or parameter update of the navigation software.
g)INS/GNSS/DVL组合导航接收机通过内部卫星接收机接受GNSS的位置信息,通过外部串行接口接收DVL的速度信息,在惯性导航的基础上,对信息的有效性进行判断,使用有效地外部辅助信息进行组合导航结算,对组合导航系统误差进行修正,抑制组合导航系统误差增长,在条件允许的情况下,对DVL误差进行修正,提高载体在水下的组合导航精度。g) The INS/GNSS/DVL integrated navigation receiver receives the GNSS position information through the internal satellite receiver, and receives the DVL speed information through the external serial interface, and judges the validity of the information on the basis of inertial navigation. The external auxiliary information is used for integrated navigation settlement, and the integrated navigation system error is corrected to suppress the error growth of the integrated navigation system. When conditions permit, the DVL error is corrected to improve the integrated navigation accuracy of the carrier under water.
具体地,导航软件工作流程为:组合导航系统加电启动后,DSP将导航软件从Flash加载到SRAM内开始运行,导航软件完成硬件初始化后,进入实时工作模式,即每5ms采集一次陀螺及加速度计数据,并进行补偿计算,同时等待外部命令,当外部命令来到时,根据收到的命令,开始导航解算、数据发送、参数更新、程序更新等任务,软件分为主程序、定时中断子程序、外部命令中断处理子程序三个相对独立的部分,主程序完成软硬件初始化、定时器设置、陀螺仪数据采集、加速度计数据采集、补偿计算、导航解算、姿态修正、误差修正、故障诊断等任务;定时器中断子程序完成陀螺仪和加速度计数据采集标志操作;外部命令中断处理子程序完成命令识别、解析、数据发送等任务;导航软件包括低层与顶层,低层软件包括传感器数据的采集、预处理(如:滤波)、存储、读取和发送,标志位的处理,芯片之间的中断、I/O、复位、片选信号、读/写控制等等;顶层软件主要包括FPGA和DSP中运行的导航软件。Specifically, the workflow of the navigation software is as follows: after the integrated navigation system is powered on and started, the DSP loads the navigation software from Flash to the SRAM to start running. After the navigation software completes the hardware initialization, it enters the real-time working mode, that is, collects the gyroscope and acceleration every 5ms Calculate data, perform compensation calculation, and wait for external commands at the same time. When the external command comes, it will start navigation calculation, data transmission, parameter update, program update and other tasks according to the received command. The software is divided into main program and timing interrupt. Subroutine and external command interrupt processing subroutine are three relatively independent parts. The main program completes software and hardware initialization, timer setting, gyroscope data acquisition, accelerometer data acquisition, compensation calculation, navigation calculation, attitude correction, error correction, Fault diagnosis and other tasks; the timer interrupt subroutine completes the gyroscope and accelerometer data acquisition flag operation; the external command interrupt processing subroutine completes tasks such as command recognition, analysis, and data transmission; the navigation software includes the lower layer and the top layer, and the lower layer software includes sensor data Acquisition, preprocessing (such as: filtering), storage, reading and sending, processing of flag bits, interrupts between chips, I/O, reset, chip select signals, read/write control, etc.; the top-level software mainly includes Navigation software running in FPGA and DSP.
S2.利用卫星定位装置输出的位置信息开始初始对准,并检测光纤惯性导航系统是否接收到标定指令,若未接收到标定指令,则在光纤惯性导航系统初始对准成功后,进入仅执行任务工况,完成组合导航。S2. Use the position information output by the satellite positioning device to start the initial alignment, and check whether the optical fiber inertial navigation system has received the calibration command. If the calibration command is not received, after the initial alignment of the optical fiber inertial navigation system is successful, enter the mission-only Working condition, complete the combined navigation.
在一个实施例中,如图4所示,所述仅执行任务工况包括:In one embodiment, as shown in FIG. 4 , the task-only operating conditions include:
接收卫星定位接收机的位置信息,并控制水下无人航行器到达预设下潜点;Receive the position information of the satellite positioning receiver, and control the underwater unmanned vehicle to reach the preset dive point;
利用卫星定位接收机的位置信息进行下潜点水面校准,在下潜点水面校准完成后,控制水下无人航行器开始下潜;Use the position information of the satellite positioning receiver to calibrate the water surface of the dive point, and control the underwater unmanned vehicle to start diving after the water surface calibration of the dive point is completed;
根据卫星定位装置的位置信息进行组合导航解算,以获取导航参数最优估计;Combined navigation calculation is performed according to the position information of the satellite positioning device to obtain the optimal estimation of navigation parameters;
在完成导航使命任务时,水下无人航行器上浮至水面并进行示位、回收,完成组合导航。When completing the navigation mission, the underwater unmanned vehicle floats to the surface of the water and performs position display and recovery to complete integrated navigation.
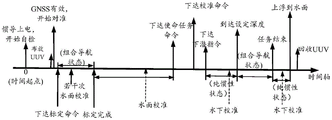
具体地,如图4所示,本实施例在对准过程中实时检测是否接收到标定指令,在未接收到标定指令或者光纤惯性导航系统(INS)之前已经完成标定并且不用重新标定时,光纤惯性导航系统仅执行任务,即在初始对准成功后,接收卫星定位接收机的位置信息进行组合导航,UUV在操作人员或母船的操控下到达预定下潜点后,UUV的中央控制单元下达开始执行导航使命任务指令,光纤惯性导航系统(INS)开始执行导航使命任务,具体为:光纤惯性导航系统利用卫星定位接收机的位置信息进行下潜前水面校准,下潜前水面校准完成后,控制UUV开始下潜,UUV到达预定深度后开行执行导航使命任务,并在导航使命任务结束后,UUV进行上浮,UUV到水面后通过GNSS或频闪灯等设备进行示位。Specifically, as shown in Figure 4, this embodiment detects in real time whether a calibration command is received during the alignment process, and when the calibration command is not received or the fiber optic inertial navigation system (INS) has been calibrated and does not need to be re-calibrated, the fiber optic The inertial navigation system only performs the task, that is, after the initial alignment is successful, it receives the position information of the satellite positioning receiver for integrated navigation. After the UUV reaches the predetermined dive point under the control of the operator or the mother ship, the central control unit of the UUV starts to issue instructions. Execute the navigation mission task command, and the fiber optic inertial navigation system (INS) starts to execute the navigation mission task, specifically: the fiber optic inertial navigation system uses the position information of the satellite positioning receiver to calibrate the water surface before diving, and after the water surface calibration before diving, control The UUV starts to dive, and after the UUV reaches the predetermined depth, it starts to perform the navigation mission. After the navigation mission is over, the UUV floats up. After the UUV reaches the water surface, it uses GNSS or strobe lights to display its position.
需要说明的是,当光纤惯性导航系统仅执行任务的情况下,图4中向上实线双箭头表示肯定存在的过程,向上虚线箭头表示可能存在的过程,各个过程发生的时刻(相对时间的值)或过程之间的时间间隔没有给出则表示为不确定的时刻或时间间隔;另外,水下巡航过程中会出现DVL的声波探测不到海底的情况,DVL如果长时间处于这种状态,INS的精度就会接近纯惯性导航精度;本实施例以大深度的AUV为例,下潜时处于纯惯性导航状态,对于小深度AUV,下潜时一般处于组合导航状态。It should be noted that when the fiber-optic inertial navigation system only performs tasks, the upward solid double arrows in Fig. 4 indicate processes that must exist, and the upward dashed arrows indicate possible processes, and the times at which each process occurs (relative time values ) or the time interval between processes is not given, it means an uncertain moment or time interval; in addition, during the underwater cruising process, the sound wave of the DVL will not be able to detect the seabed. If the DVL is in this state for a long time, The accuracy of the INS will be close to the accuracy of pure inertial navigation; this embodiment takes a large-depth AUV as an example, which is in a pure inertial navigation state when diving, and for a small-depth AUV, it is generally in an integrated navigation state when diving.
S3.若接收到标定指令,则在光纤惯性导航系统初始对准成功后,判断水下无人航行器是否需要执行任务,若需要执行任务,则进入标定与执行任务工况,完成组合导航;否则进入仅标定工况。S3. If the calibration command is received, after the initial alignment of the fiber optic inertial navigation system is successful, it is judged whether the underwater unmanned vehicle needs to perform a task, and if it needs to perform a task, enter the calibration and task execution mode to complete the integrated navigation; Otherwise, enter into the calibration-only working condition.
具体地,本实施例在初始对准过程中,若检测到光纤惯性导航系统接收到标定指令,在光纤惯性导航系统初始对准成功后,INS开始进行标定,标定完成后有两种情况:Specifically, in this embodiment, during the initial alignment process, if it is detected that the fiber optic inertial navigation system has received a calibration command, after the fiber optic inertial navigation system is initially aligned successfully, the INS starts to calibrate. After the calibration is completed, there are two situations:
第一种:不需要在标定航程的终点附近执行任务,仅需要标定的情况下,INS的仅标定工作时序图见图5;需要说明的是,回收UUV后再次执行任务时,按照仅执行任务流程执行全过程;The first type: It is not necessary to perform tasks near the end of the calibration voyage, and only calibration is required. The timing diagram of INS calibration-only work is shown in Figure 5; The whole process of process execution;
第二种:需要在标定航程的终点附近执行任务,则按照上述光纤惯性导航系统仅执行任务的情况继续执行任务,具体如图6所示。The second type: the task needs to be performed near the end of the calibrated voyage, and the task is continued according to the above-mentioned situation where the optical fiber inertial navigation system only performs the task, as shown in Figure 6.
在一个实施例中,如图5所示,所述仅标定工况包括:In one embodiment, as shown in FIG. 5, the calibration-only working conditions include:
利用卫星定位装置输出的位置信息和多普勒测速仪输出的速度信息对光纤惯性导航系统进行标定,并对光纤惯性导航系统进行水面二次对准;Use the position information output by the satellite positioning device and the speed information output by the Doppler velocimeter to calibrate the fiber optic inertial navigation system, and perform secondary alignment on the water surface for the fiber optic inertial navigation system;
在标定完成后,回收水下无人航行器。After the calibration is completed, the underwater unmanned vehicle is recovered.
在一个实施例中,如图6所示,所述标定与执行任务工况包括:In one embodiment, as shown in Figure 6, the calibration and execution task conditions include:
利用卫星定位装置输出的位置信息和多普勒测速仪输出的速度信息对光纤惯性导航系统进行标定,并在标定完成后,对光纤惯性导航系统进行水面二次对准;Use the position information output by the satellite positioning device and the speed information output by the Doppler velocimeter to calibrate the fiber optic inertial navigation system, and after the calibration is completed, perform secondary alignment on the water surface of the fiber optic inertial navigation system;
在二次对准结束后,接收卫星定位接收机的位置信息,并控制水下无人航行器到达预设下潜点;After the secondary alignment is completed, the position information of the satellite positioning receiver is received, and the underwater unmanned vehicle is controlled to reach the preset dive point;
利用卫星定位接收机的位置信息进行下潜点水面校准,在下潜点水面校准完成后,控制水下无人航行器开始下潜;Use the position information of the satellite positioning receiver to calibrate the water surface of the dive point, and control the underwater unmanned vehicle to start diving after the water surface calibration of the dive point is completed;
根据卫星定位装置的位置信息进行组合导航解算,以获取导航参数最优估计;Combined navigation calculation is performed according to the position information of the satellite positioning device to obtain the optimal estimation of navigation parameters;
在完成导航使命任务时,水下无人航行器上浮至水面并进行示位、回收,完成组合导航。When completing the navigation mission, the underwater unmanned vehicle floats to the surface of the water and performs position display and recovery to complete integrated navigation.
在一个实施例中,所述根据卫星定位装置的位置信息进行组合导航解算,以获取导航参数最优估计的步骤包括:In one embodiment, the step of performing integrated navigation calculation according to the position information of the satellite positioning device to obtain the optimal estimation of navigation parameters includes:
采集组合导航系统输出的组合导航信息;其中,所述组合导航信息包括光纤惯性导航系统输出的角速度信息和加速度信息、水声定位系统输出的位置信息、多普勒测速仪输出的速度信息、深度计输出的深度信息;Collect the integrated navigation information output by the integrated navigation system; wherein, the integrated navigation information includes the angular velocity information and acceleration information output by the fiber optic inertial navigation system, the position information output by the underwater acoustic positioning system, the speed information output by the Doppler velocimeter, the depth The depth information output by the meter;
基于线性卡尔曼模型,利用组合导航信息对光纤惯性导航系统进行水下校准;Underwater calibration of fiber optic inertial navigation system using integrated navigation information based on linear Kalman model;
利用组合导航信息进行组合导航解算,并对组合导航系统误差进行修正,得到导航参数最优估计;其中,所述导航参数最优估计包括光纤惯性导航系统的实时速度、位置以及姿态。Using the integrated navigation information to perform integrated navigation calculation, and correct the error of the integrated navigation system to obtain the optimal estimation of navigation parameters; wherein, the optimal estimation of navigation parameters includes the real-time speed, position and attitude of the optical fiber inertial navigation system.
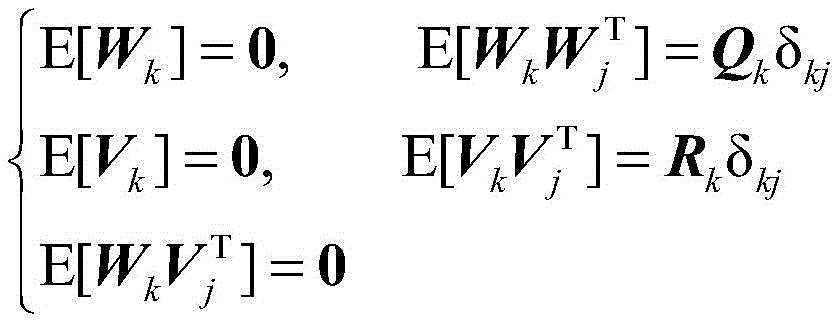
在本实施例中,当大深度UUV进行水下作业时,本实施例采用基于水声定位系统的水下校准算法,其中,组合导航系统的状态空间模型为:In this embodiment, when the large-depth UUV performs underwater operations, this embodiment adopts an underwater calibration algorithm based on an underwater acoustic positioning system, wherein the state space model of the integrated navigation system is:

其中,in,
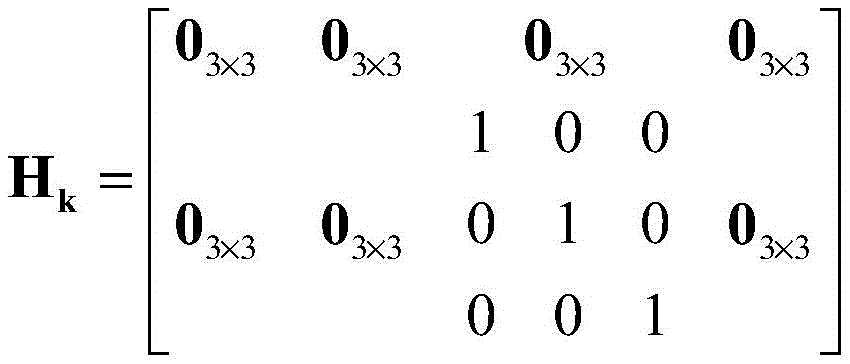
当进行水下校准时,惯性导航处于INS、水声定位系统(Underwater acousticpositioning system,UAPS)和深度计(depth gauge,DG)的组合模式,Zk和Hk分别为:When performing underwater calibration, the inertial navigation is in the combined mode of INS, Underwater acoustic positioning system (UAPS) and depth gauge (DG), Z k and H k are respectively:

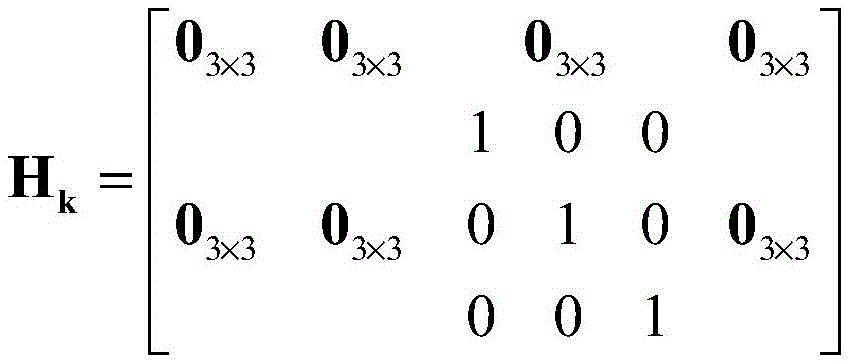
式中,

需要说明的是,本实施例对于水下校准情况,位置信息来源于母船的水声定位系统,同时本实施例在对准结束之后、组合导航开始前或组合导航过程中,可以利用GNSS对INS进行若干次校准,在收不到GNSS信号的情况下调试INS时(例如:车间或实验室内对惯导进行调试),可以利用中央控制单元发送位置信息来辅助INS完成对准。It should be noted that, in the case of underwater calibration in this embodiment, the position information comes from the underwater acoustic positioning system of the mother ship. At the same time, in this embodiment, after the alignment is completed, before the start of integrated navigation or during the integrated navigation, GNSS can be used to monitor the INS Perform several calibrations, and when debugging the INS without receiving GNSS signals (for example: debugging the inertial navigation in the workshop or laboratory), the central control unit can be used to send position information to assist the INS to complete the alignment.
图7描述了整个UUV的组合导航系统的电气连接关系,INS是组合导航系统的中枢与核心,调试计算机仅用于岸上调试时与INS进行连接,GNSS包括GNSS水上单元与GNSS水下单元两部分,UUV系统包括UUV航行器主体和集控系统两部分,集控系统放在母船上用于控制UUV,集控系统的主体包括工控机和GNSS水上单元,GNSS水下单元安装在UUV上,GNSS水上单元与GNSS水下单元之间通过卫星进行通信(北斗一代的短信报文功能)。Figure 7 describes the electrical connection relationship of the entire UUV integrated navigation system. The INS is the center and core of the integrated navigation system. The debugging computer is only used to connect with the INS during shore debugging. The GNSS includes two parts: the GNSS water unit and the GNSS underwater unit. The UUV system includes two parts: the main body of the UUV vehicle and the centralized control system. The centralized control system is placed on the mother ship to control the UUV. The main body of the centralized control system includes an industrial computer and a GNSS water unit. The GNSS underwater unit is installed on the UUV. The communication between the above-water unit and the GNSS underwater unit is carried out through satellites (SMS message function of Beidou generation).
S4.在结束导航使命任务后,获取导航参数最优估计。S4. Obtain the optimal estimation of the navigation parameters after the navigation mission is completed.
具体地,在本实施例中,如图8、9、10所示,组合导航系统工作流程包括上电自检、对准及组合导航阶段,其中,上电自检过程中,组合导航系统对系统进行故障检查,当检测出故障后对故障置相应状态,若系统无故障则转入对准流程;在对准过程中,组合导航系统利用卫星定位信息为基准,得到当前组合导航系统初始姿态,后转入组合导航流程;在组合导航流程中,组合导航系统利用GNSS、DVL信息进行组合导航解算,得到惯导实时速度、位置、姿态等信息。Specifically, in this embodiment, as shown in Figures 8, 9, and 10, the integrated navigation system workflow includes power-on self-inspection, alignment, and integrated navigation stages, wherein, during the power-on self-inspection process, the integrated navigation system The system checks for faults. When a fault is detected, the fault is set to a corresponding state. If there is no fault in the system, it will enter the alignment process. During the alignment process, the integrated navigation system uses the satellite positioning information as a reference to obtain the initial attitude of the current integrated navigation system. , and then transfer to the integrated navigation process; in the integrated navigation process, the integrated navigation system uses GNSS and DVL information to perform integrated navigation calculations to obtain information such as inertial navigation speed, position, and attitude.
本实施例提供了一种深海水下无人航行器惯导方法,所述方法通过划分仅执行任务、标定后执行任务和仅需标定三种情况,并配置导航计算机硬件和导航软件,实现了针对大深度UUV惯导的组合导航方案及其组合导航算法的技术方案,解决了大深度UUV从布放、水下执行任务到回收全过程中INS的工作时序问题。与现有技术相比,该方法不仅考虑了大深度水下无人航行器导航,而且能够针对不同情况进行标定和执行任务;本发明提供的方法具有硬件集成度高、功耗低、计算简单、实时性好等优点,提高了水下导航系统组合导航精度和使用灵活性。This embodiment provides an inertial navigation method for deep-sea underwater unmanned vehicles. The method divides the three situations of only performing tasks, performing tasks after calibration, and only requiring calibration, and configuring navigation computer hardware and navigation software. Aiming at the integrated navigation scheme of large-depth UUV inertial navigation and the technical solution of its integrated navigation algorithm, it solves the problem of the working sequence of INS in the whole process of large-depth UUV from deployment, underwater mission execution to recovery. Compared with the prior art, this method not only considers the navigation of large-depth underwater unmanned vehicles, but also can perform calibration and perform tasks for different situations; the method provided by the invention has the advantages of high hardware integration, low power consumption, and simple calculation , good real-time performance, etc., which improves the accuracy and flexibility of the integrated navigation of the underwater navigation system.
需要说明的是,上述各过程的序号的大小并不意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本申请实施例的实施过程构成任何限定。It should be noted that the sequence numbers of the above processes do not mean the order of execution, and the execution order of each process should be determined by its functions and internal logic, and should not constitute any limitation to the implementation process of the embodiment of the present application.
在一个实施例中,如图11所示,本实施例提供了一种深海水下无人航行器惯导系统,所述系统包括:In one embodiment, as shown in FIG. 11 , this embodiment provides a deep-sea underwater unmanned vehicle inertial navigation system, the system comprising:
系统自检模块101,用于对组合导航系统进行自检,并在自检通过后,布放水下无人航行器;The system self-
初始对准模块102,用于利用卫星定位装置输出的位置信息开始初始对准,并检测光纤惯性导航系统是否接收到标定指令,若未接收到标定指令,则在光纤惯性导航系统初始对准成功后,进入仅执行任务工况,完成组合导航;The
任务判断模块103,用于若接收到标定指令,则在光纤惯性导航系统初始对准成功后,判断水下无人航行器是否需要执行任务,若需要执行任务,则进入标定与执行任务工况,完成组合导航;否则进入仅标定工况;The
数据输出模块104,用于在结束导航使命任务后,获取导航参数最优估计。The
关于一种深海水下无人航行器惯导系统的具体限定可以参见上述对于一种深海水下无人航行器惯导方法的限定,此处不再赘述。本领域普通技术人员可以意识到,结合本申请所公开的实施例描述的各个模块和步骤,能够以硬件、软件或者两者结合来实现。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用使用不同方法来实现所描述的功能,但是这种实现不应认为超出本申请的范围。For the specific definition of a deep-sea underwater unmanned vehicle inertial navigation system, please refer to the above-mentioned definition of a deep-sea underwater unmanned vehicle inertial navigation method, which will not be repeated here. Those skilled in the art can appreciate that the various modules and steps described in connection with the embodiments disclosed in the present application can be implemented by hardware, software or a combination of both. Whether these functions are executed by hardware or software depends on the specific application and design constraints of the technical solution. Skilled artisans may use different methods to implement the described functions for each specific application, but such implementation should not be regarded as exceeding the scope of the present application.
本发明实施例提供了一种深海水下无人航行器惯导系统,通过系统自检模块对组合导航系统进行自检;通过初始对准模块和任务判断模块实现光纤惯性导航系统的初始对准,并根据是否接收到标定指令划分仅执行任务、标定后执行任务和仅需标定三种情况,完成组合导航;与现有技术相比,本申请通过划分为仅执行任务、DVL标定后执行任务和仅需标定三种情况,解决了大深度UUV从布放、水下执行任务到回收全过程中INS的工作时序问题,可以适用于大深度水下无人航行器,同时保证了水下机器人导航的精确度。The embodiment of the present invention provides an inertial navigation system for deep sea underwater unmanned vehicles, which performs self-inspection on the integrated navigation system through the system self-inspection module; realizes the initial alignment of the fiber optic inertial navigation system through the initial alignment module and the task judgment module , and according to whether the calibration instruction is received, it is divided into three situations of only performing tasks, performing tasks after calibration, and only requiring calibration to complete integrated navigation; compared with the prior art, this application divides into only performing tasks and performing tasks after DVL calibration And only three situations need to be calibrated, which solves the problem of INS working sequence in the whole process of large-depth UUV from deployment, underwater mission to recovery, and can be applied to large-depth underwater unmanned vehicles, while ensuring the safety of underwater robots. Navigational precision.
图12是本发明实施例提供的一种计算机设备,包括存储器、处理器和收发器,它们之间通过总线连接;存储器用于存储一组计算机程序指令和数据,并可以将存储的数据传输给处理器,处理器可以执行存储器存储的程序指令,以执行上述方法的步骤。Figure 12 is a computer device provided by an embodiment of the present invention, including a memory, a processor and a transceiver, which are connected by a bus; the memory is used to store a set of computer program instructions and data, and can transmit the stored data to A processor, the processor can execute the program instructions stored in the memory to perform the steps of the above method.
其中,存储器可以包括易失性存储器或非易失性存储器,或可包括易失性和非易失性存储器两者;处理器可以是中央处理器、微处理器、特定应用集成电路、可编程逻辑器件或其组合。通过示例性但不是限制性说明,上述可编程逻辑器件可以是复杂可编程逻辑器件、现场可编程逻辑门阵列、通用阵列逻辑或其任意组合。Among them, the memory may include volatile memory or non-volatile memory, or may include both volatile and non-volatile memory; the processor may be a central processing unit, a microprocessor, an application-specific integrated circuit, a programmable Logic devices or combinations thereof. By way of illustration but not limitation, the aforementioned programmable logic device may be complex programmable logic device, field programmable logic gate array, general array logic or any combination thereof.
另外,存储器可以是物理上独立的单元,也可以与处理器集成在一起。In addition, the memory can be a physically independent unit, or it can be integrated with the processor.
本领域普通技术人员可以理解,图12中示出的结构,仅仅是与本申请方案相关的部分结构的框图,并不构成对本申请方案所应用于其上的计算机设备的限定,具体的计算机设备可以包括比图中所示更多或更少的部件,或者组合某些部件,或者具有相同的部件布置。Those of ordinary skill in the art can understand that the structure shown in Figure 12 is only a block diagram of a partial structure related to the solution of this application, and does not constitute a limitation on the computer equipment on which the solution of this application is applied. The specific computer equipment More or fewer components than shown in the figures may be included, or certain components may be combined, or have the same component arrangement.
在一个实施例中,本发明实施例提供了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现上述方法的步骤。In one embodiment, an embodiment of the present invention provides a computer-readable storage medium, on which a computer program is stored, and when the computer program is executed by a processor, the steps of the above method are implemented.
本发明实施例提供的一种深海水下无人航行器惯导方法、系统、设备及介质,其一种深海水下无人航行器惯导方法克服了传统水下无人航行器无法应用在大深度水下作业的缺陷,保证了导航系统的可靠性,具有计算复杂度低和较高的实用价值等优点。The embodiment of the present invention provides a deep sea unmanned vehicle inertial navigation method, system, equipment and medium. The deep sea underwater unmanned vehicle inertial navigation method overcomes the inability of traditional underwater unmanned vehicles to be applied The defects of deep underwater operation ensure the reliability of the navigation system, and have the advantages of low computational complexity and high practical value.
在上述实施例中,可以全部或部分地通过软件、硬件、固件或者其任意组合来实现。当使用软件实现时,可以全部或部分地以计算机程序产品的形式实现。所述计算机程序产品包括一个或多个计算机指令。在计算机上加载和执行所述计算机程序指令时,全部或部分地产生按照本发明实施例所述的流程或功能。所述计算机可以是通用计算机、专用计算机、计算机网络、或者其他可编程装置。所述计算机指令可以存储在计算机可读存储介质中,或者从一个计算机可读存储介质向另一个计算机可读存储介质传输,例如,所述计算机指令可以从一个网站站点、计算机、服务器或数据中心通过有线(例如同轴电缆、光纤、数字用户线)或无线(例如红外、无线、微波等)方式向另一个网站站点、计算机、服务器或数据中心进行传输。所述计算机可读存储介质可以是计算机能够存取的任何可用介质或者是包含一个或多个可用介质集成的服务器、数据中心等数据存储设备。所述可用介质可以是磁性介质,(例如,软盘、硬盘、磁带)、光介质(例如,DVD)、或者半导体介质(例如SSD)等。In the above embodiments, all or part of them may be implemented by software, hardware, firmware or any combination thereof. When implemented using software, it may be implemented in whole or in part in the form of a computer program product. The computer program product includes one or more computer instructions. When the computer program instructions are loaded and executed on the computer, all or part of the processes or functions according to the embodiments of the present invention will be generated. The computer can be a general purpose computer, a special purpose computer, a computer network, or other programmable devices. The computer instructions may be stored in or transmitted from one computer-readable storage medium to another computer-readable storage medium, for example, the computer instructions may be transmitted from a website, computer, server or data center Transmission to another website site, computer, server, or data center by wired (eg, coaxial cable, optical fiber, DSL) or wireless (eg, infrared, wireless, microwave, etc.) means. The computer-readable storage medium may be any available medium that can be accessed by a computer, or a data storage device such as a server or a data center integrated with one or more available media. The available media may be magnetic media (eg, floppy disk, hard disk, magnetic tape), optical media (eg, DVD), or semiconductor media (eg, SSD).
本领域技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于计算机可读取存储介质中,该计算机程序在执行时,可包括如上述各方法的实施例的流程。Those skilled in the art can understand that the realization of all or part of the processes in the methods of the above embodiments can be completed by instructing related hardware through a computer program, and the computer program can be stored in a computer-readable storage medium, the computer program During execution, it may include the processes of the embodiments of the above-mentioned methods.
以上所述实施例仅表达了本申请的几种优选实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本申请的保护范围。因此,本申请专利的保护范围应以所述权利要求的保护范围为准。The above-mentioned embodiments only express several preferred implementation modes of the present application, and the description thereof is relatively specific and detailed, but it should not be construed as limiting the scope of the patent for the invention. It should be noted that those skilled in the art can make several improvements and substitutions without departing from the technical principle of the present invention, and these improvements and substitutions should also be regarded as the protection scope of the present application. Therefore, the scope of protection of the patent application should be based on the scope of protection of the claims.
Claims (10)


Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211421803.5A CN115790579B (en) | 2022-11-14 | 2022-11-14 | Inertial navigation method, system, equipment and medium for deep-sea underwater unmanned aircraft |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211421803.5A CN115790579B (en) | 2022-11-14 | 2022-11-14 | Inertial navigation method, system, equipment and medium for deep-sea underwater unmanned aircraft |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN115790579A true CN115790579A (en) | 2023-03-14 |
| CN115790579B CN115790579B (en) | 2025-08-01 |
Family
ID=85437453
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211421803.5A Active CN115790579B (en) | 2022-11-14 | 2022-11-14 | Inertial navigation method, system, equipment and medium for deep-sea underwater unmanned aircraft |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115790579B (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117782079A (en) * | 2024-01-08 | 2024-03-29 | 湖南工程学院 | An integrated navigation computing system based on RISC-V architecture |
| CN118330701A (en) * | 2024-06-13 | 2024-07-12 | 青岛哈尔滨工程大学创新发展中心 | Underwater positioning method of underwater vehicle capable of being separated from main and sub |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108279023A (en) * | 2017-01-05 | 2018-07-13 | 北京四维图新科技股份有限公司 | Field data collecting device precision check method and device, collecting vehicle and field data acquisition system |
| CN109000644A (en) * | 2018-06-15 | 2018-12-14 | 北京航天发射技术研究所 | A kind of Inertial Measurement Unit systematic calibration method based on VxWorks |
| CN115113188A (en) * | 2022-06-27 | 2022-09-27 | 中国人民解放军战略支援部队信息工程大学 | Doppler velocity measurement error calibration method for underwater combined navigation |
-
2022
- 2022-11-14 CN CN202211421803.5A patent/CN115790579B/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108279023A (en) * | 2017-01-05 | 2018-07-13 | 北京四维图新科技股份有限公司 | Field data collecting device precision check method and device, collecting vehicle and field data acquisition system |
| CN109000644A (en) * | 2018-06-15 | 2018-12-14 | 北京航天发射技术研究所 | A kind of Inertial Measurement Unit systematic calibration method based on VxWorks |
| CN115113188A (en) * | 2022-06-27 | 2022-09-27 | 中国人民解放军战略支援部队信息工程大学 | Doppler velocity measurement error calibration method for underwater combined navigation |
Non-Patent Citations (2)
| Title |
|---|
| ZHANG, HAOSU 等: "Integrated navigation algorithm for deep-sea AUV based on M-estimation and heavy-tailed noise", 《 APPLIED OCEAN RESEARCH》, vol. 141, 16 December 2023 (2023-12-16), pages 1 - 3 * |
| 张淏酥 等: "一种基于极坐标模型的多AUV协同导航与定位算法", 《无人系统技术》, vol. 5, no. 01, 28 March 2022 (2022-03-28), pages 69 - 79 * |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117782079A (en) * | 2024-01-08 | 2024-03-29 | 湖南工程学院 | An integrated navigation computing system based on RISC-V architecture |
| CN118330701A (en) * | 2024-06-13 | 2024-07-12 | 青岛哈尔滨工程大学创新发展中心 | Underwater positioning method of underwater vehicle capable of being separated from main and sub |
| CN118330701B (en) * | 2024-06-13 | 2024-09-03 | 青岛哈尔滨工程大学创新发展中心 | Underwater positioning method of underwater vehicle capable of being separated from main and sub |
Also Published As
| Publication number | Publication date |
|---|---|
| CN115790579B (en) | 2025-08-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11279045B2 (en) | Robot pose estimation method and apparatus and robot using the same | |
| CN104457754B (en) | SINS/LBL (strapdown inertial navigation systems/long base line) tight combination based AUV (autonomous underwater vehicle) underwater navigation positioning method | |
| CN101858748B (en) | Fault-tolerance autonomous navigation method of multi-sensor of high-altitude long-endurance unmanned plane | |
| CN102288170B (en) | Correction method of electronic compass in underwater vehicle | |
| CN117232497B (en) | A combined navigation and positioning system and method for underwater defect detection robots for dams | |
| CN104422948A (en) | Embedded type combined navigation system and method thereof | |
| CN110806209A (en) | An underwater robot multi-equipment integrated navigation system and method | |
| CN102506857A (en) | Relative attitude measurement real-time dynamic filter method based on dual-inertial measurement unit/differential global positioning system (IMU/DGPS) combination | |
| CN101920762A (en) | A ship dynamic positioning method based on real-time correction of noise matrix | |
| CN105547290B (en) | It is a kind of based on ultra short baseline locating system from latent device air navigation aid | |
| CN103217699B (en) | Integrated navigation system recursion optimizing initial-alignment method based on polarization information | |
| CN115790579B (en) | Inertial navigation method, system, equipment and medium for deep-sea underwater unmanned aircraft | |
| CN111781624B (en) | Universal integrated navigation system and method | |
| CN115016504B (en) | A real-time calculation method for the relative motion state of two ships | |
| CN110989647A (en) | Multi-sensor fusion flight controller based on SoC | |
| CN102589570B (en) | Single-point offshore calibration method of marine aided inertial navigation system | |
| CN115752453A (en) | Electromagnetic log ocean current estimation and integrated navigation method and system based on HMM | |
| CN116660579A (en) | An anemometer data correction method, system and device | |
| CN102564459B (en) | Method for calibrating single-shaft-rotation modulation strapdown inertial navigation system at sea | |
| CN110779514A (en) | Hierarchical Kalman fusion method and device for auxiliary attitude determination of bionic polarization navigation | |
| CN117029872A (en) | AUV navigation method and system based on INS/DVL/LBL tight combination | |
| CN112649001B (en) | Gesture and position resolving method for small unmanned aerial vehicle | |
| CN103901459B (en) | The filtering method of Measurement delay in a kind of MEMS/GPS integrated navigation system | |
| CN115127553A (en) | Navigation positioning system and navigation positioning method for mining vehicle | |
| CN105300407A (en) | Marine dynamic starting method for uniaxial modulation laser gyro inertial navigation system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |