CN115503602A - Vehicle chassis obstacle early warning method and device, vehicle and storage medium - Google Patents
Vehicle chassis obstacle early warning method and device, vehicle and storage medium Download PDFInfo
- Publication number
- CN115503602A CN115503602A CN202211337918.6A CN202211337918A CN115503602A CN 115503602 A CN115503602 A CN 115503602A CN 202211337918 A CN202211337918 A CN 202211337918A CN 115503602 A CN115503602 A CN 115503602A
- Authority
- CN
- China
- Prior art keywords
- vehicle
- chassis
- obstacle
- current vehicle
- early warning
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q9/00—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling
Landscapes
- Engineering & Computer Science (AREA)
- Human Computer Interaction (AREA)
- Mechanical Engineering (AREA)
- Traffic Control Systems (AREA)
Abstract
本申请涉及车辆障碍预警技术领域,特别涉及一种车辆底盘障碍物的预警方法、装置、车辆及存储介质,其中,车辆的底盘中央位置设置有检测件,包括:采集当前车辆的实际车速;在实际车速小于预设车速时,控制当前车辆进入底盘障碍预警模式,以控制检测件采集处于车辆底部的障碍物的垂直距离;计算当前车辆的底盘安全距离,并在垂直距离大于底盘安全距离时,控制当前车辆进行底盘障碍预警提示。根据本申请实施例的车辆底盘障碍物的预警方法,通过车辆速度及车辆底盘的检测件扫描障碍物信息相结合的方式,能够为用户提供预警,从而避免用户的经济损失,同时保障用户的行车安全。
The present application relates to the technical field of early warning of vehicle obstacles, and in particular to a method, device, vehicle and storage medium for early warning of obstacles in the vehicle chassis, wherein a detection piece is provided at the center of the chassis of the vehicle, including: collecting the actual vehicle speed of the current vehicle; When the actual vehicle speed is lower than the preset vehicle speed, control the current vehicle to enter the chassis obstacle warning mode to control the detection part to collect the vertical distance of the obstacle at the bottom of the vehicle; calculate the chassis safety distance of the current vehicle, and when the vertical distance is greater than the chassis safety distance, Control the current vehicle for chassis obstacle warning prompts. According to the early warning method of vehicle chassis obstacles in the embodiment of the present application, by combining the vehicle speed and the detection piece of the vehicle chassis to scan the obstacle information, early warning can be provided for the user, thereby avoiding the user's economic loss, and at the same time ensuring the user's driving Safety.
Description
技术领域technical field
本申请涉及车辆障碍预警技术领域,特别涉及一种车辆底盘障碍物的预警方法、装置、车辆及存储介质。The present application relates to the technical field of early warning of vehicle obstacles, in particular to a method, device, vehicle and storage medium for early warning of vehicle chassis obstacles.
背景技术Background technique
随着车辆保有量的增加,已成为用户出行必不可少的交通工具,但在行车时也会存在一些路障问题,例如在行车过程中,道路中间有凸起的异物、坑洞坑或道路的起伏较大等时,车辆在通过这些路障时,有时会出现用户把握不好高度而出现刮蹭车辆底盘的情况,易导致底盘零部件变形、断裂等情况,因此,需要对车辆的底盘进行测距预警。With the increase in the number of vehicles, it has become an indispensable means of transportation for users to travel, but there are also some roadblocks when driving, for example, during driving, there are raised foreign objects, potholes or road bumps in the middle of the road. When the ups and downs are large, when the vehicle passes through these roadblocks, sometimes the user may not grasp the height and scratch the chassis of the vehicle, which may easily lead to deformation and breakage of the chassis parts. Therefore, it is necessary to test the chassis of the vehicle distance warning.
相关技术中,往往通过用户在车辆启动前对底盘环境环视进行检测,或在驾驶过程中由用户的驾驶状态判断底盘有无异物,并将底盘的路况信息发送到云端计算以对用户预警。In related technologies, the user usually checks the surrounding environment of the chassis before starting the vehicle, or judges whether there is any foreign object in the chassis by the user's driving state during driving, and sends the road condition information of the chassis to the cloud computing for early warning to the user.
然而,通过人工的方式在对车辆底盘异物检测时,易存在漏检问题,因此,会使车辆存在安全隐患,易造成交通事故的发生,亟需解决。However, when detecting foreign objects on the vehicle chassis manually, there is a problem of missed detection. Therefore, it will cause potential safety hazards for the vehicle and easily cause traffic accidents, which needs to be solved urgently.
发明内容Contents of the invention
本申请提供一种车辆底盘障碍物的预警方法、装置、车辆及存储介质,以解决相关技术中车辆底盘障碍物的检测方法易存在漏检,从而会导致交通安全隐患等问题。The present application provides an early warning method, device, vehicle, and storage medium for vehicle chassis obstacles, so as to solve the problems that the vehicle chassis obstacle detection method in the related art is prone to missed detection, which may lead to traffic safety hazards and other problems.
本申请第一方面实施例提供一种车辆底盘障碍物的预警方法,车辆的底盘中央位置设置有检测件,其中,所述方法包括以下步骤:采集当前车辆的实际车速;在所述实际车速小于预设车速时,控制所述当前车辆进入底盘障碍预警模式,以控制所述检测件采集处于车辆底部的障碍物的垂直距离;以及计算所述当前车辆的底盘安全距离,并在所述垂直距离大于所述底盘安全距离时,控制所述当前车辆进行底盘障碍预警提示。The embodiment of the first aspect of the present application provides a method for early warning of obstacles in the chassis of a vehicle. A detection part is provided at the center of the chassis of the vehicle, wherein the method includes the following steps: collecting the actual vehicle speed of the current vehicle; when the actual vehicle speed is less than When the vehicle speed is preset, control the current vehicle to enter the chassis obstacle early warning mode to control the detection part to collect the vertical distance of the obstacle at the bottom of the vehicle; and calculate the chassis safety distance of the current vehicle, and When the distance is greater than the chassis safety distance, the current vehicle is controlled to perform a chassis obstacle warning prompt.
根据上述技术手段,通过检测车辆车速以及激光雷达扫描障碍物信息,可以提高检测精度,避免出现刮蹭情况,保障行车安全。According to the above technical means, by detecting the speed of the vehicle and scanning the obstacle information by the laser radar, the detection accuracy can be improved, scratches can be avoided, and driving safety can be ensured.
进一步地,在本申请的一个实施例中,所述计算所述当前车辆的底盘安全距离,包括:采集所述当前车辆的整车质量;基于所述整车质量匹配所述底盘安全距离。Further, in an embodiment of the present application, the calculating the chassis safety distance of the current vehicle includes: collecting the vehicle mass of the current vehicle; and matching the chassis safety distance based on the vehicle mass.
根据上述技术手段,通过采集整车质量,匹配相应的底盘安全距离,可以给予用户预警提示,避免用户的经济损失。According to the above technical means, by collecting the vehicle quality and matching the corresponding chassis safety distance, the user can be given an early warning prompt to avoid the user's economic loss.
进一步地,在本申请的一个实施例中,所述控制所述当前车辆进行底盘障碍预警提示,包括:根据所述垂直距离匹配最佳提醒方式;按照所述最佳提醒方式控制所述当前车辆的至少一个声学提醒装置和/或至少一个光学提醒装置进行提醒。Further, in an embodiment of the present application, the controlling the current vehicle to perform a chassis obstacle early warning prompt includes: matching the best reminder method according to the vertical distance; controlling the current vehicle according to the best reminder method At least one acoustic reminder device and/or at least one optical reminder device reminds.
根据上述技术手段,通过对障碍物和车辆底盘的垂直距离匹配不同的提醒方式,从而使用户快速做出判断,及时调整车辆方向,避免出现行车故障。According to the above-mentioned technical means, by matching different reminding methods to the vertical distance between the obstacle and the vehicle chassis, the user can quickly make a judgment, adjust the direction of the vehicle in time, and avoid driving failures.
进一步地,在本申请的一个实施例中,所述控制所述检测件采集处于车辆底部的障碍物的垂直距离,包括:判断所述障碍物是否处于预设区域;如果处于所述预设区域,则采集所述障碍物的相关信息,否则忽视所述障碍物。Further, in an embodiment of the present application, the controlling the detection part to collect the vertical distance of the obstacle at the bottom of the vehicle includes: judging whether the obstacle is in a preset area; if it is in the preset area , the relevant information of the obstacle is collected, otherwise, the obstacle is ignored.
根据上述技术手段,通过判断障碍物是否处于车辆预设区域内,提高了障碍物数据信息的计算效率。According to the above technical means, by judging whether the obstacle is within the preset area of the vehicle, the calculation efficiency of the obstacle data information is improved.
进一步地,在本申请的一个实施例中,在控制所述当前车辆进行底盘障碍预警提示之后,还包括:检测所述障碍物是否离开所述预设区域;在检测到离开所述预设区域时,停止进行底盘障碍预警提示。Further, in one embodiment of the present application, after controlling the current vehicle to give a warning prompt for chassis obstacles, it also includes: detecting whether the obstacle leaves the preset area; , the chassis obstacle warning prompt will stop.
根据上述技术手段,通过激光雷达的实时检测,控制底盘障碍预警暂停提示,提高了用户行车的体验感。According to the above-mentioned technical means, through the real-time detection of the laser radar, the warning suspension prompt of the chassis obstacle is controlled, and the driving experience of the user is improved.
本申请第二方面实施例提供一种车辆底盘障碍物的预警装置,车辆的底盘中央位置设置有检测件,包括:采集模块,用于采集当前车辆的实际车速;控制模块,用于在所述实际车速小于预设车速时,控制所述当前车辆进入底盘障碍预警模式,以控制所述检测件采集处于车辆底部的障碍物的垂直距离;以及计算模块,用于计算所述当前车辆的底盘安全距离,并在所述垂直距离大于所述底盘安全距离时,控制所述当前车辆进行底盘障碍预警提示。The embodiment of the second aspect of the present application provides an early warning device for obstacles in the chassis of a vehicle. A detection part is provided at the center of the chassis of the vehicle, including: an acquisition module for acquiring the actual vehicle speed of the current vehicle; a control module for When the actual vehicle speed is less than the preset vehicle speed, control the current vehicle to enter the chassis obstacle warning mode to control the detection part to collect the vertical distance of the obstacle at the bottom of the vehicle; and a calculation module for calculating the chassis safety of the current vehicle distance, and when the vertical distance is greater than the chassis safety distance, the current vehicle is controlled to perform a chassis obstacle warning prompt.
进一步地,在本申请的一个实施例中,所述计算模块,包括:第一采集单元,用于采集所述当前车辆的整车质量;第一匹配单元,用于基于所述整车质量匹配所述底盘安全距离。Further, in one embodiment of the present application, the calculation module includes: a first acquisition unit, configured to acquire the vehicle mass of the current vehicle; a first matching unit, configured to match the vehicle weight based on the vehicle mass The chassis safety distance.
进一步地,在本申请的一个实施例中,所述计算模块,包括:第二匹配单元,用于根据所述垂直距离匹配最佳提醒方式;控制单元,用于按照所述最佳提醒方式控制所述当前车辆的至少一个声学提醒装置和/或至少一个光学提醒装置进行提醒。Further, in an embodiment of the present application, the calculation module includes: a second matching unit, configured to match the optimal reminder method according to the vertical distance; a control unit, configured to control At least one acoustic reminder device and/or at least one optical reminder device of the current vehicle provide a reminder.
进一步地,在本申请的一个实施例中,所述控制模块,包括:判断单元,用于判断所述障碍物是否处于预设区域;第二采集单元,用于如果处于所述预设区域,则采集所述障碍物的相关信息,否则忽视所述障碍物。Further, in an embodiment of the present application, the control module includes: a judging unit, configured to judge whether the obstacle is in a preset area; a second acquisition unit, configured to, if it is in the preset area, Then collect the relevant information of the obstacle, otherwise ignore the obstacle.
进一步地,在本申请的一个实施例中,在控制所述当前车辆进行底盘障碍预警提示之后,所述计算模块,还包括:检测单元,用于检测所述障碍物是否离开所述预设区域;停止单元,用于在检测到离开所述预设区域时,停止进行底盘障碍预警提示。Further, in an embodiment of the present application, after the current vehicle is controlled to perform a chassis obstacle warning prompt, the calculation module further includes: a detection unit, configured to detect whether the obstacle leaves the preset area ; A stop unit, configured to stop the chassis obstacle warning prompt when it is detected that the vehicle leaves the preset area.
本申请第三方面实施例提供一种车辆,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的车辆底盘障碍物的预警方法。The embodiment of the third aspect of the present application provides a vehicle, including: a memory, a processor, and a computer program stored on the memory and operable on the processor, and the processor executes the program to implement the following: The method for early warning of vehicle chassis obstacles described in the above embodiments.
本申请第四方面实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现如上述实施例所述的车辆底盘障碍物的预警方法。The embodiment of the fourth aspect of the present application provides a computer-readable storage medium, on which a computer program is stored, and the program is executed by a processor, so as to implement the early warning method for vehicle chassis obstacles as described in the above-mentioned embodiments.
本申请实施例在采集到当前车辆的实际车速小于预设车速时,控制当前车辆进入底盘障碍预警模式,以控制检测件采集处于车辆底部的障碍物的垂直距离并计算当前车辆的底盘安全距离,在垂直距离大于底盘安全距离时,控制当前车辆进行底盘障碍预警提示。由此,解决了相关技术中车辆底盘障碍物的检测方法易存在漏检,从而会导致交通安全隐患的问题。In the embodiment of the present application, when the actual vehicle speed of the current vehicle is collected to be lower than the preset vehicle speed, the current vehicle is controlled to enter the chassis obstacle early warning mode, so as to control the detection part to collect the vertical distance of the obstacle at the bottom of the vehicle and calculate the chassis safety distance of the current vehicle, When the vertical distance is greater than the chassis safety distance, the current vehicle is controlled to give a warning prompt for chassis obstacles. As a result, the problem that the detection method of the vehicle chassis obstacle in the related art is prone to missed detection, which may lead to traffic safety hazards, is solved.
本申请附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。Additional aspects and advantages of the application will be set forth in part in the description which follows, and in part will be obvious from the description, or may be learned by practice of the application.
附图说明Description of drawings
本申请上述的和/或附加的方面和优点从下面结合附图对实施例的描述中将变得明显和容易理解,其中:The above and/or additional aspects and advantages of the present application will become apparent and easy to understand from the following description of the embodiments in conjunction with the accompanying drawings, wherein:
图1为根据本申请实施例提供的一种车辆底盘障碍物的预警方法的流程图;Fig. 1 is a flow chart of an early warning method for a vehicle chassis obstacle provided according to an embodiment of the present application;
图2为根据本申请一个实施例的整体流程示意图;FIG. 2 is a schematic diagram of an overall process according to an embodiment of the present application;
图3为根据本申请一个实施例的俯视截面示意图;Fig. 3 is a top cross-sectional schematic view according to an embodiment of the present application;
图4为根据本申请一个实施例的侧面截面示意图;Fig. 4 is a schematic side sectional view according to an embodiment of the present application;
图5为根据本申请实施例的车辆底盘障碍物的预警装置的方框示意图;5 is a schematic block diagram of an early warning device for vehicle chassis obstacles according to an embodiment of the present application;
图6为根据本申请实施例的车辆的结构示意图。Fig. 6 is a schematic structural diagram of a vehicle according to an embodiment of the present application.
附图标记说明:10-车辆底盘障碍物的预警装置;100-采集模块、200-控制模块、300-计算模块。Explanation of reference numerals: 10-an early warning device for vehicle chassis obstacles; 100-acquisition module, 200-control module, 300-calculation module.
具体实施方式detailed description
下面详细描述本申请的实施例,实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本申请,而不能理解为对本申请的限制。Embodiments of the present application are described in detail below, and examples of the embodiments are shown in the drawings, wherein the same or similar reference numerals denote the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary, and are intended to explain the present application, and should not be construed as limiting the present application.
下面参考附图描述本申请实施例的车辆底盘障碍物的预警方法、装置、车辆及存储介质。针对上述背景技术中提到的相关技术中车辆底盘障碍物的检测方法易存在漏检,从而会导致交通安全隐患的问题,本申请提供了一种车辆底盘障碍物的预警方法,在该方法中,在采集到当前车辆的实际车速小于预设车速时,控制当前车辆进入底盘障碍预警模式,以控制检测件采集处于车辆底部的障碍物的垂直距离并计算当前车辆的底盘安全距离,在垂直距离大于底盘安全距离时,控制当前车辆进行底盘障碍预警提示。由此,解决了相关技术中车辆底盘障碍物的检测方法易存在漏检,从而会导致交通安全隐患的问题,通过车辆速度及车辆底部的检测件扫描障碍物信息相结合的方式,能够为用户提供预警,从而避免用户的经济损失,同时保障用户的行车安全。The method, device, vehicle and storage medium for early warning of vehicle chassis obstacles according to the embodiments of the present application will be described below with reference to the accompanying drawings. Aiming at the problem that the vehicle chassis obstacle detection method in the related art mentioned in the above background technology is prone to missed detection, which will lead to traffic safety hazards, the present application provides an early warning method for vehicle chassis obstacles. , when the actual speed of the current vehicle is less than the preset speed, the current vehicle is controlled to enter the chassis obstacle warning mode to control the detection part to collect the vertical distance of the obstacle at the bottom of the vehicle and calculate the chassis safety distance of the current vehicle. When the distance is greater than the chassis safety distance, the current vehicle is controlled to give a warning prompt for chassis obstacles. Thus, it solves the problem that the vehicle chassis obstacle detection method in the related art is prone to missing detection, which will lead to traffic safety hazards. The combination of vehicle speed and detection piece scanning obstacle information at the bottom of the vehicle can provide users with Provide early warning, so as to avoid the user's economic loss, while ensuring the user's driving safety.
具体而言,图1为本申请实施例所提供的一种车辆底盘障碍物的预警方法的流程示意图。Specifically, FIG. 1 is a schematic flowchart of a method for early warning of vehicle chassis obstacles provided by an embodiment of the present application.
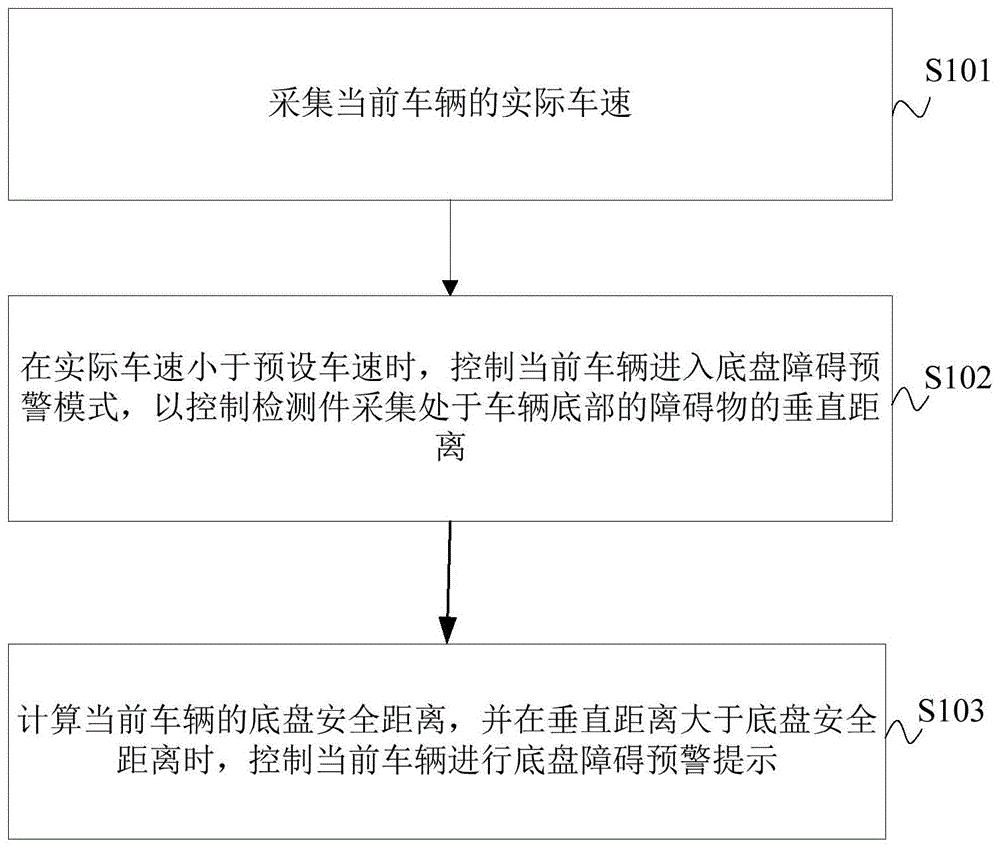
如图1所示,车辆的底盘中央位置设置有检测件,其中,该车辆底盘障碍物的预警方法包括以下步骤:As shown in Figure 1, a detection part is arranged at the central position of the chassis of the vehicle, wherein the early warning method of the vehicle chassis obstacle comprises the following steps:
在步骤S101中,采集当前车辆的实际车速。In step S101, the actual vehicle speed of the current vehicle is collected.
具体地,如图2所示,本申请实施例在用户行车过程中,当车辆遇到异常情况,例如车辆通过有障碍物路的面或者路面凸起等无法避免的路况时,此时,需要通过车辆内的速度传感器采集当前车辆的实际速度,以判断车辆底部是否存在障碍物。Specifically, as shown in Figure 2, in the embodiment of the present application, when the vehicle encounters an abnormal situation during the driving process of the user, for example, when the vehicle passes through an unavoidable road condition such as a road with obstacles or a bump on the road, at this time, it is necessary to The actual speed of the current vehicle is collected through the speed sensor in the vehicle to determine whether there is an obstacle at the bottom of the vehicle.
在步骤S102中,在实际车速小于预设车速时,控制当前车辆进入底盘障碍预警模式,以控制检测件采集处于车辆底部的障碍物的垂直距离。In step S102, when the actual vehicle speed is lower than the preset vehicle speed, the current vehicle is controlled to enter the chassis obstacle warning mode, so as to control the detection part to collect the vertical distance of the obstacle at the bottom of the vehicle.
其中,预设车速可以为用户设定的速度阈值,也可以为经计算机多次仿真得到的阈值,在此不做具体限定。Wherein, the preset vehicle speed may be a speed threshold set by the user, or a threshold obtained by computer simulations for many times, which is not specifically limited here.
优选地,本申请实施例的检测件可以为激光雷达,并且可以在车辆底盘中央安装一个或多个激光雷达,以用于扫描车辆底盘的障碍物信息,提高检测精度。Preferably, the detection device in the embodiment of the present application can be a laser radar, and one or more laser radars can be installed in the center of the vehicle chassis to scan the obstacle information of the vehicle chassis to improve detection accuracy.
具体地,若采集到当前车辆的实际车速小于预设车速(如30km/h)时,则判定车辆底部存在障碍物,此时激光雷达介入对障碍物进行检测,并控制当前车辆进入底盘障碍预警模式,以避免用户在通过障碍物时,由于车辆倾斜角度问题,导致车辆前端可以正常通过而车辆后端底盘会碰到障碍物的情况,从而造成用户的经济损失。Specifically, if the actual speed of the current vehicle is less than the preset speed (such as 30km/h), it is determined that there is an obstacle at the bottom of the vehicle. At this time, the laser radar intervenes to detect the obstacle and controls the current vehicle to enter the chassis obstacle early warning system. Mode, to avoid the situation that the front end of the vehicle can pass normally but the rear chassis of the vehicle will hit the obstacle due to the tilt angle of the vehicle when the user passes through the obstacle, thus causing economic losses to the user.
进一步地,在本申请的一个实施例中,控制检测件采集处于车辆底部的障碍物的垂直距离,包括:判断障碍物是否处于预设区域;如果处于预设区域,则采集障碍物的相关信息,否则忽视障碍物。Further, in one embodiment of the present application, the control detection part collects the vertical distance of the obstacle at the bottom of the vehicle, including: judging whether the obstacle is in a preset area; if it is in a preset area, collecting information about the obstacle , otherwise the obstacle is ignored.
其中,如图3所示,预设区域为车辆底盘整体除去4个轮胎之外,剩下的车辆区域。Wherein, as shown in FIG. 3 , the preset area is the remaining vehicle area of the entire vehicle chassis except four tires.
进一步地,在车辆通过障碍物时,通过激光雷达扫描障碍物数据信息,并判断该障碍物是否处于预设区域内,若障碍物处于与预设区域内,则计算障碍物与车辆底盘的垂直距离,若障碍物不处于预设区域内,则说明障碍物不能触碰到车辆底盘,此时将该障碍物的数据信息剔除并忽视障碍物,以提高计算效率。Further, when the vehicle passes through an obstacle, the obstacle data information is scanned by the laser radar, and it is judged whether the obstacle is in the preset area, and if the obstacle is in the preset area, the vertical distance between the obstacle and the vehicle chassis is calculated. If the obstacle is not within the preset area, it means that the obstacle cannot touch the vehicle chassis. At this time, the data information of the obstacle is removed and the obstacle is ignored to improve the calculation efficiency.
在步骤S103中,计算当前车辆的底盘安全距离,并在垂直距离大于底盘安全距离时,控制当前车辆进行底盘障碍预警提示。In step S103, the chassis safety distance of the current vehicle is calculated, and when the vertical distance is greater than the chassis safety distance, the current vehicle is controlled to perform a chassis obstacle warning prompt.
进一步地,在本申请的一个实施例中,计算当前车辆的底盘安全距离,包括:采集当前车辆的整车质量;基于整车质量匹配底盘安全距离。Further, in an embodiment of the present application, calculating the chassis safety distance of the current vehicle includes: collecting the vehicle mass of the current vehicle; and matching the chassis safety distance based on the vehicle mass.
具体地,如图4所示,本申请实施例在采集当前车辆的整车质量之前,首先构建整车质量和车辆底盘安全距离的关系映射模型;其次,采集车辆的整车质量,通过对于整车质量的计算,在关系映射模型中匹配相应的底盘安全距离。其中,整车质量可以包括车辆质量以及车辆内部前排用户和/或后排用户的质量,并且整车质量与车辆底盘安全距离的关系映射模型均可以由本领域技术人员根据不同车辆的型号、用途进行设置,在此不做具体限定。Specifically, as shown in Figure 4, before collecting the current vehicle mass, the embodiment of the present application first constructs a relationship mapping model between the vehicle mass and the vehicle chassis safety distance; The calculation of vehicle mass matches the corresponding chassis safety distance in the relational mapping model. Wherein, the whole vehicle quality may include the vehicle quality and the quality of the front row users and/or the rear row users inside the vehicle, and the relationship mapping model between the whole vehicle quality and the safety distance of the vehicle chassis can be determined by those skilled in the art according to the models and uses of different vehicles. It is not specifically limited here.
进一步地,本申请实施例基于车辆底盘中央的激光雷达建立坐标系,并将激光雷达的中心作为坐标原点,该坐标系将车辆底盘平面分为4个区域,分别对应坐标轴的4个象限;其次,将激光雷达采集的障碍物数据信息反馈到车辆的计算中心,通过接收到的多条反馈信息可以得出该障碍物与激光雷达对应的角度以及长度;最后,根据该障碍物与激光雷达的角度可以得到障碍物对应落在的车辆底盘的坐标象限,同时,根据该障碍物与激光雷达的角度通过三角函数可以计算出障碍物对应的x和y轴的具体坐标信息,其坐标计算公式如下:Further, in the embodiment of the present application, a coordinate system is established based on the laser radar in the center of the vehicle chassis, and the center of the laser radar is used as the origin of the coordinates. The coordinate system divides the vehicle chassis plane into 4 regions, corresponding to the 4 quadrants of the coordinate axes; Secondly, the obstacle data information collected by the lidar is fed back to the vehicle's computing center, and the angle and length corresponding to the obstacle and the lidar can be obtained through the received multiple feedback information; finally, according to the obstacle and the lidar The angle of the obstacle can be obtained corresponding to the coordinate quadrant of the vehicle chassis where the obstacle falls. At the same time, according to the angle between the obstacle and the lidar, the specific coordinate information of the x and y axes corresponding to the obstacle can be calculated through trigonometric functions. The coordinate calculation formula as follows:
X=L*sinα;X=L*sinα;
Y=L*cosα;Y=L*cosα;
其中,α为障碍物与激光雷达的角度,L为障碍物与激光雷达的距离长度。Among them, α is the angle between the obstacle and the lidar, and L is the distance between the obstacle and the lidar.
进一步地,本申请实施例在获得障碍物对应的坐标信息后,进而判断该障碍物是否处于车辆底盘的预设区域内,若处于车辆底盘的预设区域内,则通过激光雷达的扫描能够得到该障碍物与激光雷达的直线距离以及角度,并通过该直线距离以及角度,通过三角函数得到障碍物与车辆底盘的垂直距离,其计算公式如下:Furthermore, in the embodiment of the present application, after obtaining the coordinate information corresponding to the obstacle, it is further judged whether the obstacle is within the preset area of the vehicle chassis, and if it is within the preset area of the vehicle chassis, then the laser radar scan can be used to obtain The straight-line distance and angle between the obstacle and the laser radar, and through the straight-line distance and angle, the vertical distance between the obstacle and the vehicle chassis is obtained through a trigonometric function, and the calculation formula is as follows:
H=L*sinα;H=L*sinα;
其中,H为障碍物与车辆底盘的垂直距离。Among them, H is the vertical distance between the obstacle and the vehicle chassis.
进一步地,本申请实施例将得到的障碍物与车辆底盘的垂直距离,与当前车辆的底盘安全距离作比较,若垂直距离大于底盘安全距离时,则控制当前车辆进行底盘障碍预警提示。Further, the embodiment of the present application compares the obtained vertical distance between the obstacle and the chassis of the vehicle with the chassis safety distance of the current vehicle, and if the vertical distance is greater than the chassis safety distance, the current vehicle is controlled to perform a chassis obstacle warning prompt.
进一步地,在本申请的一个实施例中,控制当前车辆进行底盘障碍预警提示,包括:根据垂直距离匹配最佳提醒方式;按照最佳提醒方式控制当前车辆的至少一个声学提醒装置和/或至少一个光学提醒装置进行提醒。Further, in an embodiment of the present application, controlling the current vehicle to perform early warning prompts of chassis obstacles includes: matching the optimal reminder mode according to the vertical distance; controlling at least one acoustic reminder device and/or at least one acoustic reminder device of the current vehicle according to the optimal reminder mode An optical reminder device for reminder.
其中,声学提醒装置可以为车载喇叭、音响系统、警报器或者其他具有声学提醒功能的提醒设备;光学提醒装置可以为LED(light emitting diode,发光二极管)显示屏,液晶显示屏或者其他具有光学显示功能的显示设备,在此不做具体限定。Wherein, the acoustic reminder device can be a car horn, sound system, siren or other reminder equipment with an acoustic reminder function; the optical reminder device can be an LED (light emitting diode, light emitting diode) display, a liquid crystal display or other devices with optical The display device of the function is not specifically limited here.
具体地,当障碍物与车辆底盘的垂直距离大于或等于底盘安全距离时,则匹配至少一个声学提醒装置进行提醒,例如,通过音响系统向用户发出“请注意,车辆底盘存在障碍物,请小心驾驶”等提醒信息;当障碍物与车辆底盘的垂直距离小于底盘安全距离时,则说明障碍物有刮蹭到车辆底盘的风险,此时可以通过至少一个声学提醒装置和/或至少一个光学提醒装置进行提醒,例如,通过音响系统向用户发出“请注意,车辆底盘存在障碍物,请调整好车辆角度并谨慎驾驶,避免刮蹭”以及通过在LED显示屏中显示“请注意,车辆底盘存在障碍物,请调整好车辆角度并谨慎驾驶,避免刮蹭”等提醒信息。Specifically, when the vertical distance between the obstacle and the vehicle chassis is greater than or equal to the chassis safety distance, at least one acoustic warning device is matched to remind, for example, the sound system sends out "Please note that there is an obstacle in the vehicle chassis, please be careful." Driving" and other reminder information; when the vertical distance between the obstacle and the vehicle chassis is less than the chassis safety distance, it means that the obstacle has the risk of scratching the vehicle chassis, at this time, at least one acoustic reminder device and/or at least one optical reminder can be used The device reminds, for example, through the sound system to send out "Please note that there are obstacles in the vehicle chassis, please adjust the angle of the vehicle and drive carefully to avoid scratches" and by displaying "Please note that there are obstacles in the vehicle chassis" on the LED display. Obstacles, please adjust the vehicle angle and drive carefully to avoid scratches" and other reminders.
需要说明的是,当车辆底盘存在障碍物,并通过障碍物与车辆底盘的垂直距离选择适宜的提醒装置,如可以单独通过声学提醒装置或光学提醒装置进行提醒,也可以通过声学和光学提醒装置结合的方式进行提醒,在此不做具体限定。It should be noted that when there is an obstacle in the chassis of the vehicle, an appropriate reminder device can be selected through the vertical distance between the obstacle and the vehicle chassis, such as an acoustic reminder device or an optical reminder device, or an acoustic and optical reminder device. The reminder is performed in a combined manner, which is not specifically limited here.
进一步地,在本申请的一个实施例中,在控制当前车辆进行底盘障碍预警提示之后,还包括:检测障碍物是否离开预设区域;在检测到离开预设区域时,停止进行底盘障碍预警提示。Further, in one embodiment of the present application, after controlling the current vehicle to perform the early warning prompt of the chassis obstacle, it also includes: detecting whether the obstacle leaves the preset area; and stopping the early warning prompt of the chassis obstacle when it is detected that the vehicle leaves the preset area .
具体地,本申请实施例在控制当前车辆进行底盘障碍预警提示之后,用户通过激光雷达检测到的障碍物信息及得到的障碍物位置进行调整车辆角度,在调整过程中,通过激光雷达实时检测障碍物是否离开预设区域,在检测到障碍物离开预设区域时,则说明车辆可以恢复正常行驶状态,此时,停止进行底盘障碍预警提示。Specifically, in the embodiment of the present application, after the current vehicle is controlled to provide early warning of chassis obstacles, the user adjusts the vehicle angle through the obstacle information detected by the laser radar and the obtained obstacle position. During the adjustment process, the obstacle is detected in real time through the laser radar. Whether the object leaves the preset area, and when the obstacle is detected to leave the preset area, it means that the vehicle can return to the normal driving state. At this time, the chassis obstacle warning prompt will stop.
根据本申请实施例提出的车辆底盘障碍物的预警方法,在采集到当前车辆的实际车速小于预设车速时,控制当前车辆进入底盘障碍预警模式,以控制检测件采集处于车辆底部的障碍物的垂直距离并计算当前车辆的底盘安全距离,在垂直距离大于底盘安全距离时,控制当前车辆进行底盘障碍预警提示。由此,解决了相关技术中车辆底盘障碍物的检测方法易存在漏检,从而会导致交通安全隐患的问题,通过车辆速度及车辆底盘的检测件扫描障碍物信息相结合的方式,能够为用户提供预警,从而避免用户的经济损失,同时保障用户的行车安全。According to the early warning method for vehicle chassis obstacles proposed in the embodiment of the present application, when the actual vehicle speed of the current vehicle is collected to be lower than the preset vehicle speed, the current vehicle is controlled to enter the chassis obstacle early warning mode, so as to control the detection part to collect the detection of obstacles at the bottom of the vehicle The vertical distance is calculated and the chassis safety distance of the current vehicle is calculated. When the vertical distance is greater than the chassis safety distance, the current vehicle is controlled to give a chassis obstacle warning prompt. Thus, it solves the problem that the vehicle chassis obstacle detection method in the related art is prone to missed detection, which will lead to traffic safety hazards. The combination of vehicle speed and vehicle chassis detection piece scanning obstacle information can provide users with Provide early warning, so as to avoid the user's economic loss, while ensuring the user's driving safety.
其次参照附图描述根据本申请实施例提出的车辆底盘障碍物的预警装置。Next, an early warning device for vehicle chassis obstacles proposed according to an embodiment of the present application will be described with reference to the accompanying drawings.
图5是本申请实施例的车辆底盘障碍物的预警装置的方框示意图。Fig. 5 is a schematic block diagram of an early warning device for vehicle chassis obstacles according to an embodiment of the present application.
如图5所示,车辆的底盘中央位置设置有检测件,该车辆底盘障碍物的预警装置10包括:采集模块100、控制模块200和计算模块300。As shown in FIG. 5 , a detection part is provided at the center of the chassis of the vehicle. The vehicle chassis
其中,采集模块100,用于采集当前车辆的实际车速;Wherein, the
控制模块200,用于在实际车速小于预设车速时,控制当前车辆进入底盘障碍预警模式,以控制检测件采集处于车辆底部的障碍物的垂直距离;以及The
计算模块300,用于计算当前车辆的底盘安全距离,并在垂直距离大于底盘安全距离时,控制当前车辆进行底盘障碍预警提示。The
进一步地,在本申请的一个实施例中,计算模块300,包括:第一采集单元和第一匹配单元。Further, in an embodiment of the present application, the
其中,第一采集单元,用于采集当前车辆的整车质量;Wherein, the first collection unit is used to collect the vehicle quality of the current vehicle;
第一匹配单元,用于基于整车质量匹配底盘安全距离。The first matching unit is used for matching the chassis safety distance based on the vehicle quality.
进一步地,在本申请的一个实施例中,计算模块300,包括:第二匹配单元和控制单元。Further, in an embodiment of the present application, the
其中,第二匹配单元,用于根据垂直距离匹配最佳提醒方式;Wherein, the second matching unit is used to match the best reminder method according to the vertical distance;
控制单元,用于按照最佳提醒方式控制当前车辆的至少一个声学提醒装置和/或至少一个光学提醒装置进行提醒。The control unit is used to control at least one acoustic reminder device and/or at least one optical reminder device of the current vehicle to remind according to the optimal reminder method.
进一步地,在本申请的一个实施例中,控制模块200,包括:判断单元和第二采集单元。Further, in an embodiment of the present application, the
其中,判断单元,用于判断障碍物是否处于预设区域;Wherein, the judging unit is used to judge whether the obstacle is in the preset area;
第二采集单元,用于如果处于预设区域,则采集障碍物的相关信息,否则忽视障碍物。The second collection unit is used to collect relevant information of the obstacle if it is in the preset area, otherwise ignore the obstacle.
进一步地,在本申请的一个实施例中,在控制当前车辆进行底盘障碍预警提示之后,计算模块300,还包括:检测单元和停止单元。Further, in an embodiment of the present application, after the current vehicle is controlled to perform a chassis obstacle warning prompt, the
其中,检测单元,用于检测障碍物是否离开预设区域;Wherein, the detection unit is used to detect whether the obstacle leaves the preset area;
停止单元,用于在检测到离开预设区域时,停止进行底盘障碍预警提示。The stop unit is configured to stop the chassis obstacle warning prompt when it is detected that the vehicle leaves the preset area.
根据本申请实施例提出的车辆底盘障碍物的预警装置,在采集到当前车辆的实际车速小于预设车速时,控制当前车辆进入底盘障碍预警模式,以控制检测件采集处于车辆底部的障碍物的垂直距离并计算当前车辆的底盘安全距离,在垂直距离大于底盘安全距离时,控制当前车辆进行底盘障碍预警提示。由此,解决了相关技术中车辆底盘障碍物的检测方法易存在漏检,从而会导致交通安全隐患的问题,通过车辆速度及车辆底盘的检测件扫描障碍物信息相结合的方式,能够为用户提供预警,从而避免用户的经济损失,同时保障用户的行车安全。According to the vehicle chassis obstacle early warning device proposed in the embodiment of the present application, when the actual vehicle speed of the current vehicle is collected to be lower than the preset vehicle speed, the current vehicle is controlled to enter the chassis obstacle early warning mode, so as to control the detection part to collect the detection of the obstacle at the bottom of the vehicle The vertical distance is calculated and the chassis safety distance of the current vehicle is calculated. When the vertical distance is greater than the chassis safety distance, the current vehicle is controlled to give a chassis obstacle warning prompt. Thus, it solves the problem that the vehicle chassis obstacle detection method in the related art is prone to missed detection, which will lead to traffic safety hazards. The combination of vehicle speed and vehicle chassis detection piece scanning obstacle information can provide users with Provide early warning, so as to avoid the user's economic loss, while ensuring the user's driving safety.
图6为本申请实施例提供的车辆的结构示意图。该车辆可以包括:FIG. 6 is a schematic structural diagram of a vehicle provided in an embodiment of the present application. The vehicle can include:
存储器601、处理器602及存储在存储器601上并可在处理器602上运行的计算机程序。A
处理器602执行程序时实现上述实施例中提供的车辆底盘障碍物的预警方法。When the
进一步地,车辆还包括:Further, the vehicle also includes:
通信接口603,用于存储器601和处理器602之间的通信。The
存储器601,用于存放可在处理器602上运行的计算机程序。The
存储器601可能包含高速RAM(Random Access Memory,随机存取存储器)存储器,也可能还包括非易失性存储器,例如至少一个磁盘存储器。The
如果存储器601、处理器602和通信接口603独立实现,则通信接口603、存储器601和处理器602可以通过总线相互连接并完成相互间的通信。总线可以是ISA(IndustryStandard Architecture,工业标准体系结构)总线、PCI(Peripheral Component,外部设备互连)总线或EISA(Extended Industry Standard Architecture,扩展工业标准体系结构)总线等。总线可以分为地址总线、数据总线、控制总线等。为便于表示,图6中仅用一条粗线表示,但并不表示仅有一根总线或一种类型的总线。If the
可选的,在具体实现上,如果存储器601、处理器602及通信接口603,集成在一块芯片上实现,则存储器601、处理器602及通信接口603可以通过内部接口完成相互间的通信。Optionally, in specific implementation, if the
处理器602可能是一个CPU(Central Processing Unit,中央处理器),或者是ASIC(Application Specific Integrated Circuit,特定集成电路),或者是被配置成实施本申请实施例的一个或多个集成电路。The
本申请实施例还提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上的车辆底盘障碍物的预警方法。The embodiment of the present application also provides a computer-readable storage medium, on which a computer program is stored, and when the program is executed by a processor, the above method for early warning of vehicle chassis obstacles is realized.
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本申请的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不是必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或N个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。In the description of this specification, descriptions referring to the terms "one embodiment", "some embodiments", "example", "specific examples", or "some examples" mean that specific features described in connection with the embodiment or example , structure, material or characteristic is included in at least one embodiment or example of the present application. In this specification, the schematic representations of the above terms are not necessarily directed to the same embodiment or example. Moreover, the described specific features, structures, materials or characteristics may be combined in any one or N embodiments or examples in an appropriate manner. In addition, those skilled in the art can combine and combine different embodiments or examples and features of different embodiments or examples described in this specification without conflicting with each other.
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本申请的描述中,“N个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。In addition, the terms "first" and "second" are used for descriptive purposes only, and cannot be interpreted as indicating or implying relative importance or implicitly specifying the quantity of indicated technical features. Thus, the features defined as "first" and "second" may explicitly or implicitly include at least one of these features. In the description of the present application, "N" means at least two, such as two, three, etc., unless otherwise specifically defined.
流程图中或在此以其他方式描述的任何过程或方法描述可以被理解为,表示包括一个或更N个用于实现定制逻辑功能或过程的步骤的可执行指令的代码的模块、片段或部分,并且本申请的优选实施方式的范围包括另外的实现,其中可以不按所示出或讨论的顺序,包括根据所涉及的功能按基本同时的方式或按相反的顺序,来执行功能,这应被本申请的实施例所属技术领域的技术人员所理解。Any process or method description in a flowchart or otherwise described herein may be understood to represent a module, segment or portion of code comprising one or more executable instructions for implementing a custom logical function or step of a process , and the scope of preferred embodiments of the present application includes additional implementations in which functions may be performed out of the order shown or discussed, including in substantially simultaneous fashion or in reverse order depending on the functions involved, which shall It should be understood by those skilled in the art to which the embodiments of the present application belong.
应当理解,本申请的各部分可以用硬件、软件、固件或它们的组合来实现。在上述实施方式中,N个步骤或方法可以用存储在存储器中且由合适的指令执行系统执行的软件或固件来实现。如,如果用硬件来实现和在另一实施方式中一样,可用本领域公知的下列技术中的任一项或他们的组合来实现:具有用于对数据信号实现逻辑功能的逻辑门电路的离散逻辑电路,具有合适的组合逻辑门电路的专用集成电路,可编程门阵列,现场可编程门阵列等。It should be understood that each part of the present application may be realized by hardware, software, firmware or a combination thereof. In the above embodiments, the N steps or methods may be implemented by software or firmware stored in memory and executed by a suitable instruction execution system. For example, if implemented in hardware as in another embodiment, it can be implemented by any one or a combination of the following techniques known in the art: a discrete Logic circuits, ASICs with suitable combinational logic gates, programmable gate arrays, field programmable gate arrays, etc.
本技术领域的普通技术人员可以理解实现上述实施例方法携带的全部或部分步骤是可以通过程序来指令相关的硬件完成,的程序可以存储于一种计算机可读存储介质中,该程序在执行时,包括方法实施例的步骤之一或其组合。Those of ordinary skill in the art can understand that all or part of the steps carried by the methods of the above embodiments can be completed by instructing related hardware through a program, and the program can be stored in a computer-readable storage medium. When the program is executed , including one or a combination of the steps of the method embodiment.
尽管上面已经示出和描述了本申请的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本申请的限制,本领域的普通技术人员在本申请的范围内可以对上述实施例进行变化、修改、替换和变型。Although the embodiments of the present application have been shown and described above, it can be understood that the above embodiments are exemplary and should not be construed as limitations on the present application, and those skilled in the art can make the above-mentioned The embodiments are subject to changes, modifications, substitutions and variations.
Claims (10)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211337918.6A CN115503602A (en) | 2022-10-28 | 2022-10-28 | Vehicle chassis obstacle early warning method and device, vehicle and storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211337918.6A CN115503602A (en) | 2022-10-28 | 2022-10-28 | Vehicle chassis obstacle early warning method and device, vehicle and storage medium |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN115503602A true CN115503602A (en) | 2022-12-23 |
Family
ID=84512490
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211337918.6A Pending CN115503602A (en) | 2022-10-28 | 2022-10-28 | Vehicle chassis obstacle early warning method and device, vehicle and storage medium |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115503602A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115848269A (en) * | 2023-01-03 | 2023-03-28 | 重庆长安汽车股份有限公司 | Vehicle chassis scratch early warning method and device, electronic equipment and storage medium |
| CN118597124A (en) * | 2024-06-28 | 2024-09-06 | 奇瑞汽车股份有限公司 | Automobile chassis anti-scratch system and control method |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007112317A (en) * | 2005-10-21 | 2007-05-10 | Fujitsu Ten Ltd | Contact avoidance support device |
| CN202966137U (en) * | 2012-12-27 | 2013-06-05 | 惠州市德赛西威汽车电子有限公司 | Automobile bottom distance measurement alarm device |
| CN212529543U (en) * | 2020-04-11 | 2021-02-12 | 沐风电子科技(西安)有限公司 | Vehicle obstacle detection collision avoidance device and vehicle |
| CN114030466A (en) * | 2021-11-30 | 2022-02-11 | 苏州盖茨电子科技有限公司 | A vehicle chassis obstacle detection and alarm system |
-
2022
- 2022-10-28 CN CN202211337918.6A patent/CN115503602A/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007112317A (en) * | 2005-10-21 | 2007-05-10 | Fujitsu Ten Ltd | Contact avoidance support device |
| CN202966137U (en) * | 2012-12-27 | 2013-06-05 | 惠州市德赛西威汽车电子有限公司 | Automobile bottom distance measurement alarm device |
| CN212529543U (en) * | 2020-04-11 | 2021-02-12 | 沐风电子科技(西安)有限公司 | Vehicle obstacle detection collision avoidance device and vehicle |
| CN114030466A (en) * | 2021-11-30 | 2022-02-11 | 苏州盖茨电子科技有限公司 | A vehicle chassis obstacle detection and alarm system |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115848269A (en) * | 2023-01-03 | 2023-03-28 | 重庆长安汽车股份有限公司 | Vehicle chassis scratch early warning method and device, electronic equipment and storage medium |
| CN118597124A (en) * | 2024-06-28 | 2024-09-06 | 奇瑞汽车股份有限公司 | Automobile chassis anti-scratch system and control method |
| CN118597124B (en) * | 2024-06-28 | 2026-01-02 | 奇瑞汽车股份有限公司 | A vehicle chassis anti-scratch system and control method |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6933457B2 (en) | Recognition result presentation device, recognition result presentation method and autonomous mobile | |
| US7619668B2 (en) | Abnormality detecting apparatus for imaging apparatus | |
| US8913128B2 (en) | Image-based barrier detection and warning system and method thereof | |
| US7580548B2 (en) | Abnormality detecting apparatus for imaging apparatus | |
| JP3736521B2 (en) | Vehicle object recognition device | |
| CN115503602A (en) | Vehicle chassis obstacle early warning method and device, vehicle and storage medium | |
| JP2006151125A (en) | In-vehicle image processing device | |
| CN102303563B (en) | Front vehicle collision early warning system and method | |
| CN106828304A (en) | Car backing warning method using structure light sensing obstacle | |
| CN108528337B (en) | Intelligent inner wheel difference early warning system and early warning method based on video projection | |
| JP3757937B2 (en) | Distance measuring device | |
| CN104537888A (en) | Automobile collision alarming method based on mobile phone | |
| WO2020087958A1 (en) | Processing method and device relating to foreign object covering ultrasonic radar, and device | |
| JP2018127084A (en) | Self-driving vehicle | |
| CN113581196A (en) | Vehicle driving early warning method and device, computer equipment and storage medium | |
| US12148306B2 (en) | Autonomous vehicle interaction system | |
| CN118372741A (en) | Rearview mirror adjustment method, device, electronic device and readable storage medium | |
| CN110221615A (en) | A kind of auxiliary vehicle drive method based on road conditions identification | |
| CN115593403A (en) | An early warning method for anti-collision in the side blind area of a vehicle | |
| GB2548465A (en) | Method and device for driver assistance | |
| US20250313190A1 (en) | Vehicular driving assist system with road defect detection and categorization | |
| CN115042784A (en) | Automobile adaptive cruise system control method, device, vehicle and storage medium | |
| CN106646488A (en) | Vehicle-mounted road obstacle detecting system | |
| CN105730451A (en) | Vehicle and device for detecting whether vehicle deviates from lane or not | |
| CN115571128B (en) | Vehicle following and stopping distance determining method and device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication |
Application publication date: 20221223 |