CN115457413A - Information extraction method, device, computer equipment, storage medium - Google Patents
Information extraction method, device, computer equipment, storage medium Download PDFInfo
- Publication number
- CN115457413A CN115457413A CN202211108952.6A CN202211108952A CN115457413A CN 115457413 A CN115457413 A CN 115457413A CN 202211108952 A CN202211108952 A CN 202211108952A CN 115457413 A CN115457413 A CN 115457413A
- Authority
- CN
- China
- Prior art keywords
- target
- information
- intersection point
- dimensional model
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/10—Terrestrial scenes
- G06V20/182—Network patterns, e.g. roads or rivers
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three dimensional [3D] modelling, e.g. data description of 3D objects
- G06T17/10—Constructive solid geometry [CSG] using solid primitives, e.g. cylinders, cubes
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/70—Denoising; Smoothing
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/10—Terrestrial scenes
- G06V20/17—Terrestrial scenes taken from planes or by drones
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10032—Satellite or aerial image; Remote sensing
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Geometry (AREA)
- Computer Graphics (AREA)
- Software Systems (AREA)
- Remote Sensing (AREA)
- Processing Or Creating Images (AREA)
Abstract
本申请涉及一种信息提取方法、装置、计算机设备、存储介质和计算机程序产品。所述方法包括:接收目标物体图像;根据所述目标物体图像,构建与所述目标物体图像相对应的三维模型;基于所述三维模型得到目标基准面,并对所述目标基准面进行单元提取得到多个信息单元;对满足目标条件的所述信息单元进行计算得到目标区域信息。采用本方法能够批量以及快速的对目标物体进行信息提取。
The present application relates to an information extraction method, device, computer equipment, storage medium and computer program product. The method includes: receiving an image of a target object; constructing a three-dimensional model corresponding to the image of the target object according to the image of the target object; obtaining a target reference plane based on the three-dimensional model, and performing unit extraction on the target reference plane A plurality of information units are obtained; the information units satisfying the target condition are calculated to obtain target area information. By adopting the method, the information of the target object can be extracted rapidly and in batches.
Description
技术领域technical field
本申请涉及计算机视觉领域,特别是涉及一种信息提取方法、装置、计算机设备、存储介质和计算机程序产品。The present application relates to the field of computer vision, in particular to an information extraction method, device, computer equipment, storage medium and computer program product.
背景技术Background technique
近年来,随着无人机遥测等技术与方法的进步,其拍摄的遥感数据分辨率已经足够高,包含进行城市建筑屋顶太阳能分布式光伏潜力测算所需的所有信息。In recent years, with the advancement of technologies and methods such as UAV telemetry, the resolution of the remote sensing data captured by it has been high enough to contain all the information required for the calculation of the potential of distributed photovoltaics on the rooftops of urban buildings.
但是,相对遥感技术的发展,遥感影像的信息提取技术的发展还比较落后。传统技术有基于卫星遥感图像、人工测量等。由于利用卫星遥感图像只能进行粗略的建筑边缘信息提取,精度较低,而人工测量,效率低下,费时费力。目前,如何批量以及快速提取城市建筑屋顶信息是一个迫待解决的问题。However, compared with the development of remote sensing technology, the development of remote sensing image information extraction technology is still relatively backward. Traditional technologies are based on satellite remote sensing images, manual measurement, etc. Since satellite remote sensing images can only be used for rough building edge information extraction, the accuracy is low, and manual measurement is inefficient, time-consuming and laborious. At present, how to batch and quickly extract urban building roof information is an urgent problem to be solved.
发明内容Contents of the invention
基于此,有必要针对上述技术问题,提供一种能够批量、快速、精准的对目标物体进行信息提取的信息提取方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。Based on this, it is necessary to provide an information extraction method, device, computer equipment, computer-readable storage medium, and computer program product that can perform batch, fast, and accurate information extraction on target objects for the above technical problems.
第一方面,本申请提供了一种信息提取方法,该方法包括:In a first aspect, the present application provides an information extraction method, the method comprising:
接收目标物体图像;Receive the image of the target object;
根据所述目标物体图像,构建与所述目标物体图像相对应的三维模型;Constructing a three-dimensional model corresponding to the target object image according to the target object image;
基于所述三维模型得到目标基准面,并对所述目标基准面进行单元提取得到多个信息单元;obtaining a target reference plane based on the three-dimensional model, and performing unit extraction on the target reference plane to obtain a plurality of information units;
对满足目标条件的所述信息单元进行计算得到目标区域信息。The information units satisfying the target condition are calculated to obtain the target area information.
在其中一个实施例中,所述基于所述三维模型得到目标基准面,并对所述目标基准面进行提取得到多个信息单元,包括:In one of the embodiments, the target reference plane is obtained based on the three-dimensional model, and the target reference plane is extracted to obtain a plurality of information units, including:
在所述三维模型中进行目标检测,得到目标立方体;performing target detection in the three-dimensional model to obtain a target cube;
将所述目标立方体进行投影,得到所述目标基准面;Projecting the target cube to obtain the target datum plane;
根据预设阈值对所述目标基准面进行切割,得到多个所述信息单元。The target reference plane is cut according to a preset threshold to obtain a plurality of the information units.
在其中一个实施例中,所述对满足目标条件的所述信息单元进行计算得到目标区域信息,包括:In one of the embodiments, the calculation of the information units satisfying the target condition to obtain the target area information includes:
在各个所述信息单元的目标位置绘制铅垂线,得到所述铅垂线与所述三维模型的交点;drawing a plumb line at the target position of each of the information units to obtain an intersection point between the plumb line and the three-dimensional model;
当所述交点为目标交点时,判定所述目标交点所在的所述信息单元满足目标条件;When the intersection point is a target intersection point, it is determined that the information unit where the target intersection point is located satisfies a target condition;
提取所述目标交点所在的所述信息单元,并根据所述目标交点所在的所述信息单元进行得到所述目标区域信息。The information unit where the target intersection is located is extracted, and the target area information is obtained according to the information unit where the target intersection is located.
在其中一个实施例中,所述目标交点的判定方式,包括:In one of the embodiments, the determination method of the target intersection includes:
根据所述交点,得到基准面;Obtain the reference plane according to the intersection point;
根据所述基准面以及预设数值对所述交点进行判断;judging the intersection point according to the reference plane and a preset value;
当所述交点与所述基准面的差值大于所述预设数值时,判定所述交点为目标交点。When the difference between the intersection point and the reference plane is greater than the preset value, it is determined that the intersection point is a target intersection point.
在其中一个实施例中,所述在各个所述信息单元的目标位置绘制铅垂线,得到所述铅垂线与所述三维模型的交点,包括:In one of the embodiments, drawing a plumb line at the target position of each information unit to obtain the intersection point between the plumb line and the three-dimensional model includes:
在各个所述信息单元的目标位置绘制铅垂线,得到至少一个所述铅垂线与所述三维模型的初始交点;drawing a plumb line at the target position of each of the information units to obtain at least one initial intersection point between the plumb line and the three-dimensional model;
根据预设方法从所述初始交点中进行筛选,得到所述铅垂线与所述模型的交点。Screening is performed from the initial intersection points according to a preset method to obtain intersection points between the plumb line and the model.
在其中一个实施例中,所述基于所述三维模型,提取得到多个信息单元,并根据多个所述信息单元以及所述三维模型,得到目标区域信息是通过预先基于工作流构建的信息提取模型根据预设参数运行后得到的。In one of the embodiments, the extraction of a plurality of information units based on the three-dimensional model, and the acquisition of the target area information based on the plurality of information units and the three-dimensional model is achieved through information extraction based on workflow in advance. The model is obtained after running according to the preset parameters.
第二方面,本申请还提供了一种信息提取装置,该装置包括:In a second aspect, the present application also provides an information extraction device, which includes:
接收模块,用于接收目标物体图像;The receiving module is used to receive the image of the target object;
构建模块,用于根据所述目标物体图像,构建与所述目标物体图像相对应的三维模型;A construction module, configured to construct a three-dimensional model corresponding to the target object image according to the target object image;
单元提取模块,用于基于所述三维模型得到目标基准面,并对所述目标基准面进行单元提取得到多个信息单元;A unit extraction module, configured to obtain a target reference plane based on the three-dimensional model, and perform unit extraction on the target reference plane to obtain a plurality of information units;
计算模块,用于当至少一个所述信息单元满足目标条件时,对所述信息单元进行计算得到目标区域信息。A calculation module, configured to perform calculation on said information units to obtain target area information when at least one of said information units meets a target condition.
第三方面,本申请还提供了一种计算机设备,该计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述任意一个实施例中的方法的步骤。In a third aspect, the present application also provides a computer device, the computer device includes a memory and a processor, the memory stores a computer program, and the processor implements the method in any one of the above embodiments when executing the computer program A step of.
第四方面,本申请还提供了一种计算机可读存储介质,该计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述任意一个实施例中的方法的步骤。In a fourth aspect, the present application also provides a computer-readable storage medium, on which a computer program is stored, and when the computer program is executed by a processor, the method in any one of the above-mentioned embodiments is implemented. step.
第五方面,本申请还提供了一种计算机程序产品,该计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述任意一个实施例中的方法的步骤。In a fifth aspect, the present application further provides a computer program product, the computer program product includes a computer program, and when the computer program is executed by a processor, the steps of the method in any one of the foregoing embodiments are implemented.
上述信息提取方法、装置、计算机设备、存储介质和计算机程序产品,服务器首先接收目标物体图像,然后根据目标物体图像构建得到与目标物体相对应的三维模型,接着基于三维模型得到目标基准面,并对目标基准面进行单元提取得到多个信息单元,最后对满足条件的信息单元进行计算得到目标区域信息。首先,服务器是利用目标物体图像得到的目标区域信息,因此无需人工进行实地测量,这样可以减少大量的人工支出;其次,通过目标条件来筛选计算目标区域信息所需的信息单元,可以实现对目标区域信息批量计算,并且利用满足目标条件的信息单元计算目标区域信息可以减少计算量,以实现快速计算得到目标区域信息。In the above information extraction method, device, computer equipment, storage medium and computer program product, the server first receives the image of the target object, and then constructs a three-dimensional model corresponding to the target object based on the image of the target object, and then obtains the target reference plane based on the three-dimensional model, and The unit is extracted from the target datum plane to obtain multiple information units, and finally the information units satisfying the conditions are calculated to obtain the target area information. First of all, the server uses the target area information obtained from the target object image, so there is no need for manual on-site measurement, which can reduce a lot of manual expenditure; secondly, the information unit required to calculate the target area information can be screened through the target condition, and the target can be realized. The area information is calculated in batches, and the calculation of the target area information by using the information units meeting the target conditions can reduce the amount of calculation, so as to achieve fast calculation to obtain the target area information.
附图说明Description of drawings
图1为一个实施例中信息提取方法的应用环境图;Fig. 1 is an application environment diagram of the information extraction method in an embodiment;
图2为一个实施例中信息提取方法的流程示意图;Fig. 2 is a schematic flow chart of an information extraction method in an embodiment;
图3为一个实施例中的三维模型示意图;Fig. 3 is a schematic diagram of a three-dimensional model in an embodiment;
图4为一个实施例中的单元提取示意图;Fig. 4 is a schematic diagram of unit extraction in an embodiment;
图5为一个实施例中的绘制铅垂线的示意图;Fig. 5 is a schematic diagram of drawing a plumb line in one embodiment;
图6为一个实施例中的利用工作流模型计算目标区域信息的流程示意图;FIG. 6 is a schematic flow chart of calculating target area information using a workflow model in an embodiment;
图7为一个实施例中信息提取方法应用于建筑屋顶的步骤示意图;Fig. 7 is a schematic diagram of the steps of applying the information extraction method to the roof of a building in an embodiment;
图8为一个实施例中倾斜摄影的目标物体图像示意图;Fig. 8 is a schematic diagram of a target object image of oblique photography in an embodiment;
图9为一个实施例中信息提取装置的结构框图;Fig. 9 is a structural block diagram of an information extraction device in an embodiment;
图10为一个实施例中计算机设备的内部结构图。Figure 10 is a diagram of the internal structure of a computer device in one embodiment.
具体实施方式detailed description
为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本申请进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本申请,并不用于限定本申请。In order to make the purpose, technical solution and advantages of the present application clearer, the present application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present application, and are not intended to limit the present application.
本申请实施例提供的信息提取方法,可以应用于如图1所示的应用环境中。其中,终端102通过网络与服务器104进行通信。数据存储系统可以存储服务器104需要处理的数据。数据存储系统可以集成在服务器104上,也可以放在云上或其他网络服务器上。终端102向服务器104发送目标物体图像,服务器104接收目标物体图像之后根据目标物体图像,构建与目标物体图像相对应的三维模型,然后基于三维模型得到目标基准面,并对目标基准面进行单元提取得到多个信息单元。在得到信息单元之后,对信息单元是否满足目标条件进行判断,对满足目标条件的信息单元进行计算得到目标区域信息。其中,终端102可以但不限于是各种个人计算机、笔记本电脑、智能手机、平板电脑、物联网设备和便携式可穿戴设备,物联网设备可为智能音箱、智能电视、智能空调、智能车载设备等。便携式可穿戴设备可为智能手表、智能手环、头戴设备等。服务器104可以用独立的服务器或者是多个服务器组成的服务器集群来实现。The information extraction method provided in the embodiment of the present application may be applied in the application environment shown in FIG. 1 . Wherein, the
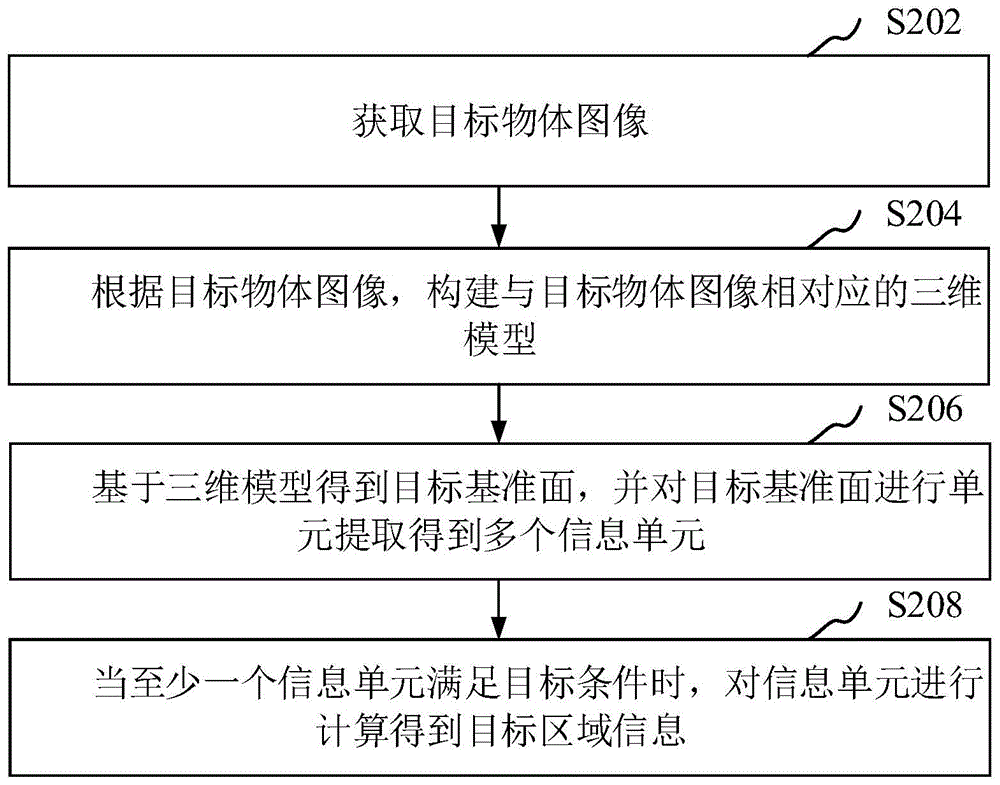
在一个实施例中,如图2所示,提供了一种信息提取方法,以该方法应用于图1中的服务器104为例进行说明,包括以下步骤:In one embodiment, as shown in FIG. 2, a method for extracting information is provided. The method is applied to the
S202,接收目标物体图像。S202. Receive an image of a target object.
其中,目标物体是指需要进行信息提取的物体,其可以是预先指定的一栋建筑物,如一栋办公楼,也可以一片建筑或区域,如在无人机航测地图上以封闭多边形的形式画出目标建筑所属的区域。Among them, the target object refers to the object that needs to be extracted, which can be a pre-designated building, such as an office building, or a building or area, such as drawn in the form of a closed polygon on the UAV aerial survey map. Out of the area to which the target building belongs.
可选地,终端向服务器发送的目标物体图像是压缩后的,因此服务器在接收目标物体图像后先进行解压,然后再对目标物体图像作进一步处理,终端将压缩后的目标物体图像发送至服务器,可以实现在同一时刻快速的将大批量的目标物体图像发送至服务器,以使服务器可以对目标物体图像进行批处理。Optionally, the target object image sent by the terminal to the server is compressed, so the server first decompresses the target object image after receiving it, and then further processes the target object image, and the terminal sends the compressed target object image to the server , it is possible to quickly send a large number of target object images to the server at the same time, so that the server can perform batch processing on the target object images.
可选地,当终端为无人机时,可以在无人机遥控系统中设定飞行高度(飞行高度一般为目标建筑中最高点高度加10米以上)、航线重叠率等参数,无人机根据上述参数进行倾斜摄影后,将拍摄得到的目标物体图像发送至服务器。Optionally, when the terminal is a UAV, parameters such as the flight height (the flight height is generally the height of the highest point in the target building plus more than 10 meters), route overlap rate and other parameters can be set in the UAV remote control system. After oblique photography is performed according to the above parameters, the captured image of the target object is sent to the server.
S204,根据目标物体图像,构建与目标物体图像相对应的三维模型。S204. Construct a three-dimensional model corresponding to the target object image according to the target object image.
可选地,可以将目标物体图像导入大疆智图软件,设定预设参数,疆智图软件会根据目标物体图像以及设定参数进行构建三维模型,可结合图3,图3为一个实施例中的三维模型示意图。其中,预设参数是指构建三维模型所需的参数,预设参数可以是三维模型格式(如OBJ格式)、精度等。Optionally, the image of the target object can be imported into the Dajiang Zhitu software, and the preset parameters can be set. The Jiangzhitu software will build a 3D model according to the image of the target object and the set parameters. It can be combined with Figure 3, which is an implementation The schematic diagram of the 3D model in the example. Wherein, the preset parameters refer to the parameters required for constructing the 3D model, and the preset parameters may be the format of the 3D model (such as OBJ format), accuracy, and the like.
可选地,服务获取目标物体图像之后,可以对目标物体图像进行预处理,例如进行增强、去噪等,以建立更加准确的三维模型。Optionally, after the service obtains the image of the target object, it may perform preprocessing on the image of the target object, such as enhancing and denoising, so as to establish a more accurate 3D model.
S206,基于三维模型得到目标基准面,并对目标基准面进行单元提取得到多个信息单元。S206. Obtain the target reference plane based on the three-dimensional model, and perform unit extraction on the target reference plane to obtain a plurality of information units.
其中,目标基准面是指用于对目标物体进行单元提取的基准面,是与三维模型中建筑物保持水平的平面,其可以对三维模型进行目标检测后得到;信息单元是指从目标基准面中得到的,包括三维模型信息的单元。Among them, the target datum plane refers to the datum plane used to extract the unit of the target object, which is a plane kept horizontal to the building in the 3D model, which can be obtained after the target detection of the 3D model; the information unit refers to the plane from the target datum plane Obtained in , including the unit of 3D model information.
可选地,服务器可以对三维模型进行目标识别后,得到一个包括三维模型中所有物体的xyz轴平行的立方体,然后将立方体的Z轴平面作为目标基准面。Optionally, after the server performs target recognition on the 3D model, it can obtain a cube including all objects in the 3D model whose xyz axes are parallel, and then use the Z-axis plane of the cube as the target reference plane.
可选地,在得到目标基准面之后,服务器对目标基准面进行单元提取,其中单元提取可以是根据预设阈值与目标基准面进行切割,以得到多个信息单元。其中,预设阈值是指预先设定的对目标基准面进行切割的大小,例如可以将预设阈值设置为0.1m(厘米),然后服务器根据0.1m对目标基准面进行分割,得到多个以预设阈值为边长的单元(0.1m*0.1m)。Optionally, after obtaining the target datum plane, the server performs unit extraction on the target datum plane, wherein the unit extraction may be cut from the target datum plane according to a preset threshold to obtain multiple information units. Wherein, the preset threshold refers to a preset size for cutting the target reference plane. For example, the preset threshold can be set to 0.1m (centimeter), and then the server divides the target reference plane according to 0.1m to obtain multiple The default threshold is the unit of side length (0.1m*0.1m).
S208,对满足目标条件的信息单元进行计算得到目标区域信息。S208. Calculate the information units satisfying the target condition to obtain target area information.
其中,目标区域信息是指最终需要的目标物体的轮廓、面积等信息,其可以根据信息单元进行计算得到。Wherein, the target area information refers to information such as the contour and area of the target object that is finally needed, which can be calculated according to the information unit.
其中,目标条件是指预先设定的对信息单元进行判断的条件,例如当前是对建筑物的屋顶区域进行计算,那么目标条件可以设定为信息单元是否为屋顶单元,即是否是组成建筑物屋顶的信息单元。Among them, the target condition refers to the pre-set condition for judging the information unit. For example, if the roof area of the building is currently calculated, then the target condition can be set as whether the information unit is a roof unit, that is, whether it is a building Information unit on the roof.
服务器在得到信息单元之后,首先对信息单元是否满足目标条件进行判断,以得到所有满足目标条件的信息单元,然后根据所有满足目标条件的信息单元进行计算得到目标区域信息,例如对信息单元中所包括的目标物体的轮廓进行计算,得到完成的目标物体的轮廓。After obtaining the information unit, the server first judges whether the information unit satisfies the target condition, so as to obtain all the information units that meet the target condition, and then calculates the target area information according to all the information units that meet the target condition, for example, for all the information units in the information unit The contour of the included target object is calculated to obtain the contour of the completed target object.
可选地,可以将目标条件设置为信息单元是需要提取的区域位置以及是否为屋顶单元,通过设置区域位置可以计算三维模型中任意的对象的区域信息。示例性的,如果需要对三维模型中的建筑A的屋顶轮廓进行计算,那么可以将目标条件这设置为建筑物A的区域位置以及是都为屋顶单元,这样服务器在进行判断时可以将除建筑物A的屋顶单元以外的信息单元过滤,然后根据建筑物A的屋顶单元进行计算得到建筑物A的屋顶轮廓。Optionally, the target condition can be set as the information unit is the location of the area to be extracted and whether it is a roof unit, and the area information of any object in the 3D model can be calculated by setting the area location. Exemplarily, if it is necessary to calculate the roof profile of building A in the 3D model, then the target condition can be set as the area position of building A and both are roof units, so that the server can calculate the building A when making a judgment. Filter information units other than the roof unit of object A, and then calculate the roof profile of building A based on the roof unit of building A.
上述信息提取方法中,服务器首先接收目标物体图像,然后根据目标物体图像构建得到与目标物体相对应的三维模型,接着基于三维模型得到目标基准面,并对目标基准面进行单元提取得到多个信息单元,最后对满足条件的信息单元进行计算得到目标区域信息。首先,服务器是利用目标物体图像得到的目标区域信息,因此无需人工进行实地测量,这样可以减少大量的人工支出;其次,通过目标条件来筛选计算目标区域信息所需的信息单元,可以实现对目标区域信息批量、精准的计算,并且利用满足目标条件的信息单元计算目标区域信息可以减少计算量,以实现快速计算得到目标区域信息。In the above information extraction method, the server first receives the image of the target object, and then constructs a 3D model corresponding to the target object based on the image of the target object, and then obtains the target reference plane based on the 3D model, and performs unit extraction on the target reference plane to obtain multiple pieces of information units, and finally calculate the information units that meet the conditions to obtain the target area information. First of all, the server uses the target area information obtained from the target object image, so there is no need for manual on-site measurement, which can reduce a lot of manual expenditure; secondly, the information unit required to calculate the target area information can be screened through the target condition, and the target can be realized. Batch and accurate calculation of area information, and the use of information units that meet the target conditions to calculate target area information can reduce the amount of calculation to achieve rapid calculation to obtain target area information.
在一个实施例中,基于三维模型得到目标基准面,并对目标基准面进行单元提取得到多个信息单元,包括:在三维模型中进行目标检测,得到目标立方体;将目标立方体进行投影,得到目标基准面;根据预设阈值对目标基准面进行切割,得到多个信息单元。In one embodiment, the target reference plane is obtained based on the 3D model, and a plurality of information units are obtained by performing unit extraction on the target reference plane, including: performing target detection in the 3D model to obtain the target cube; projecting the target cube to obtain the target Datum plane: cut the target datum plane according to the preset threshold to obtain multiple information units.
其中,目标立方体是指对三维模型进行目标检测后,能够包括整个目标物体的体积最小且各边与xyz轴平行的立方体,这样避免目标立方体过大,进而造成后续计算过程中的浪费。Among them, the target cube refers to the cube that can include the smallest volume of the entire target object after the target detection on the 3D model and whose sides are parallel to the xyz axis, so as to avoid the excessive size of the target cube and cause waste in the subsequent calculation process.
服务器在三维模型中进行目标检测,以得到能够包括整个目标物体的目标立方体,然后将目标立方体进行投影,其中可选地,可以将目标立方体投影得到世界XY平面上,以得目标基准面。然后,再根据预设阈值对目标基准面进行切割,以得到多个以预设阈值为边长的信息单元。The server performs target detection in the 3D model to obtain a target cube that can include the entire target object, and then projects the target cube. Optionally, the target cube can be projected onto the world XY plane to obtain the target reference plane. Then, the target reference plane is cut according to the preset threshold to obtain a plurality of information units with the preset threshold as the side length.
结合图4所示,图4为一个实施例中的单元提取示意图,图中立方体为目标立方体,立方体内的为目标对象,立方体上方的网格为多个信息单元。As shown in FIG. 4 , FIG. 4 is a schematic diagram of unit extraction in an embodiment. The cube in the figure is the target cube, the object inside the cube is the target object, and the grid above the cube is a plurality of information units.
在上述实施例中,服务器利用目标立方体是因为要保证后面得到的目标基准面能覆盖整个目标对象。In the above embodiments, the reason why the server uses the target cube is to ensure that the target reference plane obtained later can cover the entire target object.
在一个实施例中,对满足目标条件的信息单元进行计算得到目标区域信息,包括:在各个信息单元的目标位置绘制铅垂线,得到铅垂线与三维模型的交点;当交点为目标交点时,判定目标交点所在的信息单元满足目标条件;提取目标交点所在的信息单元,并根据目标交点所在的信息单元进行计算得到目标区域信息。In one embodiment, calculating the information units satisfying the target condition to obtain the target area information includes: drawing a plumb line at the target position of each information unit to obtain the intersection point of the vertical line and the three-dimensional model; when the intersection point is the target intersection point , determine that the information unit where the target intersection is located satisfies the target condition; extract the information unit where the target intersection is located, and calculate according to the information unit where the target intersection is located to obtain the target area information.
其中,目标位置是指在信息单元上预先设定的位置,目标位置可以是每个信息单元的中心。Wherein, the target position refers to a preset position on the information unit, and the target position may be the center of each information unit.
服务器在各个信息单元的目标位置绘制预设长度的铅垂线,这样可以得到铅垂线与三维模型的交点。当交点为目标交点时,就可以判定目标交点所在的信息单元满足目标条件。然后,提取目标交点所在的信息单元,并根据目标交点所在的信息单元进行计算得到目标区域信息。The server draws a plumb line with a preset length at the target position of each information unit, so that the intersection point of the plumb line and the three-dimensional model can be obtained. When the intersection point is the target intersection point, it can be determined that the information unit where the target intersection point is located satisfies the target condition. Then, the information unit where the target intersection is located is extracted, and calculation is performed based on the information unit where the target intersection is located to obtain target area information.
示例性的,如果需要得到的目标区域信息是目标物体的建筑屋顶轮廓,那么目标条件可以设定为信息单元是否为屋顶单元,即是否是组成建筑物屋顶的信息单元,目标交点为屋顶交点,当信息单的铅垂线与三维模型的叫交点为屋顶交点时,判定目标交点所在的信息单元满足目标条件,即目标交点所在的信息单元为屋顶单元,然后根据目标交点所在的信息单元进行计算得到目标区域信息,例如,根据屋顶单元所包括的屋顶轮廓进行拼接,即可得到目标物体的建筑屋顶轮廓。Exemplarily, if the target area information to be obtained is the building roof outline of the target object, then the target condition can be set as whether the information unit is a roof unit, that is, whether it is an information unit that constitutes the roof of the building, and the target intersection is the roof intersection, When the intersection point between the plumb line of the information sheet and the 3D model is the roof intersection point, it is determined that the information unit where the target intersection point is located meets the target condition, that is, the information unit where the target intersection point is located is a roof unit, and then the calculation is performed based on the information unit where the target intersection point is located To obtain the target area information, for example, splicing according to the roof profile included in the roof unit, the building roof profile of the target object can be obtained.
结合图5所示,图5为一个实施例中的绘制铅垂线的示意图,图中垂直于信息单元的直线为铅垂线,这样通过绘制铅垂线的方式可以得到与三维模型的交点。As shown in FIG. 5 , FIG. 5 is a schematic diagram of drawing a plumb line in an embodiment. The straight line perpendicular to the information unit in the figure is a plumb line, so that the intersection point with the three-dimensional model can be obtained by drawing the plumb line.
在上述实施例中,服务器通过绘制铅垂线的方式可以得到与三维模型的交点,再对交点是否为目标交点进行判断,然后根据目标交点所在的信息单元进行计算,得到目标区域信息,提取出目标交点所在的信息单元进行计算可以减少计算量,以实现快速计算得到目标区域信息。In the above-mentioned embodiment, the server can obtain the intersection point with the 3D model by drawing a plumb line, and then judge whether the intersection point is the target intersection point, and then calculate according to the information unit where the target intersection point is located, obtain the target area information, and extract Calculation by the information unit where the target intersection point is located can reduce the amount of calculation, so as to achieve fast calculation to obtain the information of the target area.
在一个实施例中,目标交点的判定方式,包括:根据交点,得到基准面;根据基准面以及预设数值对交点进行判断;当交点与基准面的差值大于预设数值时,判定交点为目标交点。In one embodiment, the method for judging the target intersection includes: obtaining the reference plane according to the intersection point; judging the intersection point according to the reference plane and a preset value; when the difference between the intersection point and the reference plane is greater than the preset value, determining that the intersection point is target intersection.
其中,基准面是指根据交点得到的,用于判断交点是否为目标交点的平面,其可以是服务器根据交点计算得到的,数值最小的交点所在的平面。Wherein, the reference plane refers to a plane obtained according to the intersection point and used for judging whether the intersection point is a target intersection point, which may be a plane where the intersection point with the smallest value is located based on the calculation of the server according to the intersection points.
其中,预设数值是指预先设定的量值,其是用于衡量交点是否为目标交点的指标。Wherein, the preset value refers to a preset value, which is an index used to measure whether the intersection point is a target intersection point.
服务器会提取每个交点在Z平面上的数值,然后选取Z值最小的交点作为基准面,即将Z值最小的交点作为地面,然后计算交点与基准面之间差值,当交点与基准面之间的差值大于预设数值时,判定该交点作为目标交点。The server will extract the value of each intersection point on the Z plane, and then select the intersection point with the smallest Z value as the reference plane, that is, the intersection point with the smallest Z value as the ground, and then calculate the difference between the intersection point and the reference plane. When the difference between them is greater than the preset value, the intersection point is determined as the target intersection point.
在上述实施例中,服务器通过交点与基准面之间的差值即可判定当前交点是否为目标交点,以便于后续对目标交点所在的信息单元进行计算以得到目标区域信息。In the above embodiment, the server can determine whether the current intersection point is the target intersection point according to the difference between the intersection point and the reference plane, so as to obtain the target area information by subsequent calculation of the information unit where the target intersection point is located.
在一个实施例中,在各个信息单元的目标位置绘制铅垂线,得到铅垂线与三维模型的交点,包括:在各个信息单元的目标位置绘制铅垂线,得到至少一个铅垂线与三维模型的初始交点;根据预设方法从初始交点中进行筛选,得到铅垂线与模型的交点。In one embodiment, drawing a plumb line at the target position of each information unit to obtain the intersection point of the plumb line and the three-dimensional model includes: drawing a plumb line at the target position of each information unit to obtain at least one vertical line and the three-dimensional model The initial intersection point of the model; filter from the initial intersection points according to the preset method to obtain the intersection point between the plumb line and the model.
其中,初始交点为铅垂线与三维模型相交所得到的交点,每一个信息单元对应的铅垂线与三维模型相交可得到至少一个初始交点。Wherein, the initial intersection point is the intersection point obtained by intersecting the plumb line and the three-dimensional model, and at least one initial intersection point can be obtained by intersecting the plumb line corresponding to each information unit and the three-dimensional model.
其中,预设方法是指预先设定的从初始交点中筛选交点的方法,例如每一个单元中Z值最大的交点。Wherein, the preset method refers to a preset method of screening the intersection points from the initial intersection points, for example, the intersection point with the largest Z value in each unit.
在各个信息单元的目标位置绘制铅垂线,可得到至少一个铅垂线与三维模型相交的初始交点,然后根据预设方法从每一个信息单元对应的初始交点中进行筛选,得到铅垂线与三维模型的交点。Draw a plumb line at the target position of each information unit to obtain at least one initial intersection point where the plumb line intersects with the 3D model, and then filter from the initial intersection points corresponding to each information unit according to a preset method to obtain the vertical line and the 3D model. The intersection point of the 3D model.
可选地,服务器经过每个单元的中心绘制足够长的铅垂线,然后每根铅垂线与三维模型的交点,然后从每一个信息单元对应的初始交点中选择Z值最大的点作为铅垂线与模型的交点。Optionally, the server draws a long enough plumb line through the center of each unit, and then selects the point with the largest Z value from the initial intersection points corresponding to each information unit as the lead The intersection point of the vertical line with the model.
在上述实施例中,服务器通过预设方法从初始交点中筛选得到铅垂线与模型的交点,这样可以快速得到可以进行目标条件判断的交点。In the above embodiment, the server obtains the intersection points of the plumb line and the model from the initial intersection points through a preset method, so that the intersection points that can be used to judge the target condition can be quickly obtained.
在一个实施例中,基于三维模型,提取得到多个信息单元,并根据多个信息单元以及三维模型,得到目标区域信息是通过预先基于工作流构建的信息提取模型根据预设参数运行后得到的。In one embodiment, multiple information units are extracted based on the 3D model, and the information of the target area is obtained based on the multiple information units and the 3D model, which is obtained by running an information extraction model based on workflow in advance according to preset parameters. .
可选地,三维模型导入Rhino(Rhinoceros,一种3D造型软件),即可通过Rhino自带的可视化编程平台Grasshopper(一款可视化编程语言)对模型文件进行处理,实现对目标区域信息的提取。三维模型导入Rhino后为多个Mesh物件,Rhino和Grasshopper支持对Mesh物件的连接、炸开、相交等操作。Optionally, when the 3D model is imported into Rhino (Rhinoceros, a 3D modeling software), the model file can be processed through Rhino's built-in visual programming platform Grasshopper (a visual programming language) to realize the extraction of target area information. After the 3D model is imported into Rhino, it becomes multiple Mesh objects. Rhino and Grasshopper support operations such as connecting, exploding, and intersecting Mesh objects.
结合图6,图6为一个实施例中的利用工作流模型计算目标区域信息的流程示意图。为提取出屋顶轮廓,在Grasshopper中搭建Workflow,只要在Workflow的输入端选中导入的Obj模型,程序即可根据预先设定好的精度和高度阈值自动运行,并计算出屋顶轮廓和面积。其中,高度阈值用于保证目标基准面高于Mesh物件最高点。整个Workflow分为四个部分:构建并细分基准面、计算铅垂线交点、判断屋顶交点、筛选屋顶单元。With reference to FIG. 6 , FIG. 6 is a schematic flowchart of calculating target area information by using a workflow model in an embodiment. In order to extract the roof outline, a Workflow is built in Grasshopper. As long as the imported Obj model is selected at the input end of the Workflow, the program can automatically run according to the preset accuracy and height threshold, and calculate the roof outline and area. Among them, the height threshold is used to ensure that the target reference plane is higher than the highest point of the Mesh object. The entire Workflow is divided into four parts: building and subdividing the datum plane, calculating the intersection of plumb lines, judging the intersection of the roof, and screening the roof unit.
在上述实施例中,借助于预先基于工作流构建的信息提取模型可实现对目标区域信息的全自动提取。In the above embodiments, the fully automatic extraction of target area information can be realized by means of the information extraction model constructed in advance based on the workflow.
在一个实施例中,结合图7所示,图7为一个实施例中信息提取方法应用于建筑屋顶的步骤示意图。In one embodiment, with reference to FIG. 7 , FIG. 7 is a schematic diagram of steps in which the information extraction method is applied to a building roof in one embodiment.
S702,确定需要测算屋顶光伏潜力的建筑根据需要选定需要测算屋顶光伏潜力的建筑或区域(在本项目中称之为“目标建筑”),并在无人机航测地图上以封闭多边形的形式画出目标建筑所属的地理位置。S702. Determine the building that needs to measure the photovoltaic potential of the roof. Select the building or area that needs to measure the photovoltaic potential of the roof (referred to as the "target building" in this project) according to the needs, and form a closed polygon on the UAV aerial survey map. Draw the geographic location where the target building belongs.
S704,利用无人机对目标建筑进行倾斜摄影。在无人机遥控系统中设定飞行高度(飞行高度一般为目标建筑中最高点高度加10米以上)、航线重叠率等参数,进行倾斜摄影,部分倾斜摄影图片如图8所示。S704, using the UAV to take oblique photography of the target building. In the remote control system of the UAV, parameters such as the flight height (the flight height is generally the height of the highest point in the target building plus 10 meters or more), route overlap rate and other parameters are set, and oblique photography is performed. Some oblique photography pictures are shown in Figure 8.
S706,构建目标建筑的三维模型。将倾斜摄影拍摄的图片导入大疆智图软件,设定预期的三维模型格式(如OBJ格式)、精度等参数,进行三维建模,获得目标建筑的三维模型,如图3所示。S706, constructing a three-dimensional model of the target building. Import the pictures taken by oblique photography into Dajiang Zhitu software, set the expected 3D model format (such as OBJ format), precision and other parameters, carry out 3D modeling, and obtain the 3D model of the target building, as shown in Figure 3.
S708,提取目标建筑屋顶信息。将目标建筑的三维模型导入Rhino,即可通过Rhino自带的可视化编程平台Grasshopper对模型文件进行处理,实现对目标建筑屋顶边缘、面积等信息的提取。Obj模型导入Rhino后为多个Mesh物件,Rhino和Grasshopper支持对Mesh物件的连接、炸开、相交等操作。S708, extracting roof information of the target building. Import the 3D model of the target building into Rhino, and the model file can be processed through Grasshopper, a visual programming platform that comes with Rhino, to realize the extraction of information such as the edge and area of the roof of the target building. After the Obj model is imported into Rhino, it becomes multiple Mesh objects. Rhino and Grasshopper support operations such as connection, explosion, and intersection of Mesh objects.
S710,为提取出屋顶轮廓,在Grasshopper中搭建Workflow,只要在Workflow的输入端选中导入的Obj模型,程序即可根据预先设定好的精度和高度阈值自动运行,并计算出屋顶轮廓和面积。整个Workflow分为四个部分:构建并细分基准面、计算铅垂线交点、判断屋顶交点、筛选屋顶单元:S710, in order to extract the roof outline, build Workflow in Grasshopper, as long as the imported Obj model is selected at the input end of Workflow, the program can automatically run according to the preset accuracy and height threshold, and calculate the roof outline and area. The entire Workflow is divided into four parts: constructing and subdividing the datum plane, calculating the intersection of plumb lines, judging the intersection of the roof, and screening the roof unit:
1、构建并细分基准面。(1)运用Bounding box电池(即打包好的代码单元,通过该单元可以直接对三维模型进行目标检测得到边界立方体)求得Obj模型的边界立方体,并投影到世界XY平面上,得到包含Obj模型的水平矩形基准面;(2)根据设置的精度(如0.1m),将基准面划分为以所设精度为边长的单元(0.1m*0.1m)。1. Construct and subdivide the datum. (1) Use the Bounding box battery (that is, the packaged code unit, through which the target detection of the 3D model can be directly obtained to obtain the bounding cube) to obtain the bounding cube of the Obj model, and project it onto the world XY plane to obtain the Obj model (2) According to the set precision (such as 0.1m), divide the datum plane into units (0.1m*0.1m) with the set precision as the side length.
2、计算铅垂线交点。(1)经过每个单元的中心绘制足够长的铅垂线;(2)使用Mesh|Curve(即打包好的代码单元,通过该单元可以求出铅垂线与Mesh物件的交点)电池求出每根铅垂线与Obj网格物件的交点;(3)若一根线有多个交点,则以Z值最大的点(最高的点)为准。2. Calculate the intersection point of the plumb line. (1) Draw a long enough plumb line through the center of each unit; (2) Use Mesh|Curve (that is, the packaged code unit, through which the intersection point of the plumb line and the Mesh object can be obtained) battery to find out The intersection point between each vertical line and the Obj grid object; (3) If a line has multiple intersection points, the point with the largest Z value (the highest point) shall prevail.
3、判断屋顶交点。(1)提取每个交点的Z值,得到最小的Z值;(2)不妨认为最小的Z值为地面,根据设定的高度阈值(如24m),Z值>高度阈值的交点即可认为是与屋面的交点。3. Determine the roof intersection. (1) Extract the Z value of each intersection point to obtain the minimum Z value; (2) It may be considered that the minimum Z value is the ground, and according to the set height threshold (such as 24m), the intersection point with Z value > height threshold can be considered is the intersection with the roof.
4、筛选屋顶单元。(1)将屋顶交点对应的基准面单元提取出来,即得到所有屋顶单元;(2)根据提取出的单元计算面积、提取屋顶轮廓。4. Screen the roof unit. (1) Extract the datum unit corresponding to the intersection point of the roof, that is, get all the roof units; (2) Calculate the area and extract the roof outline according to the extracted unit.
需要说明的一点是,在本实施例中目标对象为目标建筑、屋顶信息为目标区域信息。It should be noted that, in this embodiment, the target object is the target building, and the roof information is the target area information.
在上述实施例中,首先,无需人工实地测量,即可实现对目标区域信息的提取;其次,可实现对城市大量密集建筑的屋顶边缘、面积等的快速、精准提取。In the above-mentioned embodiment, firstly, the information extraction of the target area can be realized without manual on-site measurement; secondly, the rapid and accurate extraction of roof edges and areas of a large number of dense buildings in the city can be realized.
应该理解的是,虽然如上所述的各实施例所涉及的流程图中的各个步骤按照箭头的指示依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非本文中有明确的说明,这些步骤的执行并没有严格的顺序限制,这些步骤可以以其它的顺序执行。而且,如上所述的各实施例所涉及的流程图中的至少一部分步骤可以包括多个步骤或者多个阶段,这些步骤或者阶段并不必然是在同一时刻执行完成,而是可以在不同的时刻执行,这些步骤或者阶段的执行顺序也不必然是依次进行,而是可以与其它步骤或者其它步骤中的步骤或者阶段的至少一部分轮流或者交替地执行。It should be understood that although the steps in the flow charts involved in the above embodiments are shown sequentially according to the arrows, these steps are not necessarily executed sequentially in the order indicated by the arrows. Unless otherwise specified herein, there is no strict order restriction on the execution of these steps, and these steps can be executed in other orders. Moreover, at least some of the steps in the flow charts involved in the above-mentioned embodiments may include multiple steps or stages, and these steps or stages are not necessarily executed at the same time, but may be performed at different times For execution, the execution order of these steps or stages is not necessarily performed sequentially, but may be executed in turn or alternately with other steps or at least a part of steps or stages in other steps.
基于同样的发明构思,本申请实施例还提供了一种用于实现上述所涉及的信息提取方法的信息提取装置。该装置所提供的解决问题的实现方案与上述方法中所记载的实现方案相似,故下面所提供的一个或多个信息提取装置实施例中的具体限定可以参见上文中对于信息提取方法的限定,在此不再赘述。Based on the same inventive concept, an embodiment of the present application further provides an information extraction device for implementing the above-mentioned information extraction method. The solution to the problem provided by the device is similar to the implementation described in the above method, so for the specific limitations in one or more embodiments of the information extraction device provided below, please refer to the above definition of the information extraction method, I won't repeat them here.
在一个实施例中,如图9所示,提供了一种信息提取装置,包括:接收模块100、构建模块200、单元提取模块300和计算模块400,其中:In one embodiment, as shown in FIG. 9 , an information extraction device is provided, including: a receiving
接收模块100,用于接收目标物体图像;A receiving
构建模块200,用于根据目标物体图像,构建与目标物体图像相对应的三维模型;A
单元提取模块300,用于基于三维模型得到目标基准面,并对目标基准面进行单元提取得到多个信息单元;A
计算模块400,用于对满足目标条件的信息单元进行计算得到目标区域信息。The
在一个实施例中,上述单元提取模块包括:In one embodiment, the above-mentioned unit extraction module includes:
检测单元,用于在三维模型中进行目标检测,得到目标立方体。The detection unit is used for detecting the target in the three-dimensional model to obtain the target cube.
投影单元,用于将目标立方体进行投影,得到目标基准面。The projection unit is configured to project the target cube to obtain the target reference plane.
切割单元,用于根据预设阈值对目标基准面进行切割,得到多个信息单元。The cutting unit is configured to cut the target reference plane according to a preset threshold to obtain a plurality of information units.
在一个实施例中,上述计算模块400包括:In one embodiment, the
绘制单元,用于在各个信息单元的目标位置绘制铅垂线,得到铅垂线与三维模型的交点。The drawing unit is configured to draw a plumb line at the target position of each information unit, and obtain an intersection point between the plumb line and the three-dimensional model.
判断单元,用于当交点为目标交点时,判定目标交点所在的信息单元满足目标条件。The judging unit is configured to judge that the information unit where the target intersection is located satisfies the target condition when the intersection is the target intersection.
目标提取单元,用于提取目标交点所在的信息单元,并根据目标交点所在的信息单元进行得到目标区域信息。The target extraction unit is configured to extract the information unit where the target intersection is located, and obtain target area information according to the information unit where the target intersection is located.
在一个实施例中,上述判断单元包括:In one embodiment, the above-mentioned judging unit includes:
交点子单元,用于根据交点,得到基准面。The intersection subunit is used to obtain the datum plane according to the intersection point.
阈值判断子单元,用于根据基准面以及预设数值对交点进行判断。The threshold judging subunit is used to judge the intersection point according to the reference plane and the preset value.
目标判断子单元,用于当交点与基准面的差值大于预设数值时,判定交点为目标交点。The target judging subunit is used for judging the intersection point as the target intersection point when the difference between the intersection point and the reference plane is greater than a preset value.
在一个实施例中,上述绘制单元包括:In one embodiment, the above-mentioned drawing unit includes:
预处理子单元,用于在各个信息单元的目标位置绘制铅垂线,得到至少一个铅垂线与三维模型的初始交点。The preprocessing subunit is used to draw a plumb line at the target position of each information unit, and obtain at least one initial intersection point between the plumb line and the 3D model.
筛选子单元,用于根据预设方法从初始交点中进行筛选,得到铅垂线与模型的交点。The screening subunit is used to screen the initial intersection points according to a preset method to obtain the intersection points between the plumb line and the model.
在一个实施例中,上述计算模块400是通过预先基于工作流构建的信息提取模型根据预设参数运行后得到的。In one embodiment, the
上述信息提取装置中的各个模块可全部或部分通过软件、硬件及其组合来实现。上述各模块可以硬件形式内嵌于或独立于计算机设备中的处理器中,也可以以软件形式存储于计算机设备中的存储器中,以便于处理器调用执行以上各个模块对应的操作。Each module in the above-mentioned information extraction device can be fully or partially realized by software, hardware and a combination thereof. The above-mentioned modules can be embedded in or independent of the processor in the computer device in the form of hardware, and can also be stored in the memory of the computer device in the form of software, so that the processor can invoke and execute the corresponding operations of the above-mentioned modules.
在一个实施例中,提供了一种计算机设备,该计算机设备可以是服务器,其内部结构图可以如图10所示。该计算机设备包括通过系统总线连接的处理器、存储器和网络接口。其中,该计算机设备的处理器用于提供计算和控制能力。该计算机设备的存储器包括非易失性存储介质和内存储器。该非易失性存储介质存储有操作系统、计算机程序和数据库。该内存储器为非易失性存储介质中的操作系统和计算机程序的运行提供环境。该计算机设备的数据库用于存储目标物体提取数据。该计算机设备的网络接口用于与外部的终端通过网络连接通信。该计算机程序被处理器执行时以实现一种信息提取方法。In one embodiment, a computer device is provided. The computer device may be a server, and its internal structure may be as shown in FIG. 10 . The computer device includes a processor, memory and a network interface connected by a system bus. Wherein, the processor of the computer device is used to provide calculation and control capabilities. The memory of the computer device includes a non-volatile storage medium and an internal memory. The non-volatile storage medium stores an operating system, computer programs and databases. The internal memory provides an environment for the operation of the operating system and computer programs in the non-volatile storage medium. The database of the computer device is used for storing target object extraction data. The network interface of the computer device is used to communicate with an external terminal via a network connection. When the computer program is executed by the processor, an information extraction method is realized.
本领域技术人员可以理解,图10中示出的结构,仅仅是与本申请方案相关的部分结构的框图,并不构成对本申请方案所应用于其上的计算机设备的限定,具体的计算机设备可以包括比图中所示更多或更少的部件,或者组合某些部件,或者具有不同的部件布置。Those skilled in the art can understand that the structure shown in Figure 10 is only a block diagram of a part of the structure related to the solution of this application, and does not constitute a limitation to the computer equipment on which the solution of this application is applied. The specific computer equipment can be More or fewer components than shown in the figures may be included, or some components may be combined, or have a different arrangement of components.
在一个实施例中,提供了一种计算机设备,包括存储器和处理器,存储器中存储有计算机程序,该处理器执行计算机程序时实现以下步骤:接收目标物体图像;根据目标物体图像,构建与目标物体图像相对应的三维模型;基于三维模型得到目标基准面,并对目标基准面进行单元提取得到多个信息单元;对满足目标条件的信息单元进行计算得到目标区域信息。In one embodiment, a computer device is provided, including a memory and a processor, a computer program is stored in the memory, and the processor implements the following steps when executing the computer program: receiving an image of a target object; The three-dimensional model corresponding to the object image; the target reference plane is obtained based on the three-dimensional model, and the target reference plane is extracted to obtain multiple information units; the information units that meet the target conditions are calculated to obtain the target area information.
在一个实施例中,处理器执行计算机程序时所实现的基于三维模型得到目标基准面,并对目标基准面进行提取得到多个信息单元,包括:在三维模型中进行目标检测,得到目标立方体;将目标立方体进行投影,得到目标基准面;根据预设阈值对目标基准面进行切割,得到多个信息单元。In one embodiment, when the processor executes the computer program, the target reference plane is obtained based on the three-dimensional model, and the target reference plane is extracted to obtain multiple information units, including: performing target detection in the three-dimensional model to obtain the target cube; Project the target cube to obtain the target reference plane; cut the target reference plane according to the preset threshold to obtain multiple information units.
在一个实施例中,处理器执行计算机程序时所实现的对满足目标条件的信息单元进行计算得到目标区域信息,包括:在各个信息单元的目标位置绘制铅垂线,得到铅垂线与三维模型的交点;当交点为目标交点时,判定目标交点所在的信息单元满足目标条件;提取目标交点所在的信息单元,并根据目标交点所在的信息单元进行得到目标区域信息。In one embodiment, when the processor executes the computer program, the calculation of the information units meeting the target conditions to obtain the target area information includes: drawing a plumb line at the target position of each information unit to obtain the plumb line and the three-dimensional model When the intersection point is the target intersection point, it is determined that the information unit where the target intersection point is located satisfies the target condition; the information unit where the target intersection point is located is extracted, and the target area information is obtained according to the information unit where the target intersection point is located.
在一个实施例中,处理器执行计算机程序时所实现的目标交点的判定方式,包括:根据交点,得到基准面;根据基准面以及预设数值对交点进行判断;当交点与基准面的差值大于预设数值时,判定交点为目标交点。In one embodiment, the judging method of the target intersection point realized when the processor executes the computer program includes: obtaining the reference plane according to the intersection point; judging the intersection point according to the reference plane and a preset value; when the difference between the intersection point and the reference plane When it is greater than the preset value, it is determined that the intersection point is the target intersection point.
在一个实施例中,处理器执行计算机程序时所实现的在各个信息单元的目标位置绘制铅垂线,得到铅垂线与三维模型的交点,包括:在各个信息单元的目标位置绘制铅垂线,得到至少一个铅垂线与三维模型的初始交点;根据预设方法从初始交点中进行筛选,得到铅垂线与模型的交点。In one embodiment, when the processor executes the computer program, drawing a plumb line at the target position of each information unit to obtain the intersection point of the plumb line and the three-dimensional model includes: drawing a plumb line at the target position of each information unit , to obtain at least one initial intersection point between the plumb line and the three-dimensional model; and filter the initial intersection points according to a preset method to obtain the intersection point between the plumb line and the model.
在一个实施例中,处理器执行计算机程序时所实现的基于三维模型,提取得到多个信息单元,并根据多个信息单元以及三维模型,得到目标区域信息是通过预先基于工作流构建的信息提取模型根据预设参数运行后得到的。In one embodiment, when the processor executes the computer program, extracting multiple information units based on the three-dimensional model, and obtaining the target area information based on the multiple information units and the three-dimensional model is through the information extraction based on the pre-built workflow. The model is obtained after running according to the preset parameters.
在一个实施例中,提供了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现以下步骤:接收目标物体图像;根据目标物体图像,构建与目标物体图像相对应的三维模型;基于三维模型得到目标基准面,并对目标基准面进行单元提取得到多个信息单元;对满足目标条件的信息单元进行计算得到目标区域信息。In one embodiment, a computer-readable storage medium is provided, on which a computer program is stored. When the computer program is executed by a processor, the following steps are implemented: receiving an image of a target object; The corresponding three-dimensional model; the target datum plane is obtained based on the three-dimensional model, and the unit extraction of the target datum plane is performed to obtain multiple information units; the information units satisfying the target conditions are calculated to obtain the target area information.
在一个实施例中,计算机程序被处理器执行时所实现的基于三维模型得到目标基准面,并对目标基准面进行提取得到多个信息单元,包括:在三维模型中进行目标检测,得到目标立方体;将目标立方体进行投影,得到目标基准面;根据预设阈值对目标基准面进行切割,得到多个信息单元。In one embodiment, when the computer program is executed by the processor, the target reference plane is obtained based on the three-dimensional model, and the target reference plane is extracted to obtain multiple information units, including: performing target detection in the three-dimensional model to obtain the target cube ;Project the target cube to obtain the target reference plane; cut the target reference plane according to the preset threshold to obtain multiple information units.
在一个实施例中,计算机程序被处理器执行时所实现的对满足目标条件的信息单元进行计算得到目标区域信息,包括:在各个信息单元的目标位置绘制铅垂线,得到铅垂线与三维模型的交点;当交点为目标交点时,判定目标交点所在的信息单元满足目标条件;提取目标交点所在的信息单元,并根据目标交点所在的信息单元进行得到目标区域信息。In one embodiment, when the computer program is executed by the processor, the calculation of the information units satisfying the target conditions to obtain the target area information includes: drawing a plumb line at the target position of each information unit to obtain the vertical line and the three-dimensional The intersection point of the model; when the intersection point is the target intersection point, it is determined that the information unit where the target intersection point is located meets the target condition; the information unit where the target intersection point is located is extracted, and the target area information is obtained according to the information unit where the target intersection point is located.
在一个实施例中,计算机程序被处理器执行时所实现的目标交点的判定方式,包括:根据交点,得到基准面;根据基准面以及预设数值对交点进行判断;当交点与基准面的差值大于预设数值时,判定交点为目标交点。In one embodiment, the method for judging the target intersection point realized when the computer program is executed by the processor includes: obtaining the reference plane according to the intersection point; judging the intersection point according to the reference plane and a preset value; when the difference between the intersection point and the reference plane When the value is greater than the preset value, it is judged that the intersection point is the target intersection point.
在一个实施例中,计算机程序被处理器执行时所实现的在各个信息单元的目标位置绘制铅垂线,得到铅垂线与三维模型的交点,包括:在各个信息单元的目标位置绘制铅垂线,得到至少一个铅垂线与三维模型的初始交点;根据预设方法从初始交点中进行筛选,得到铅垂线与模型的交点。In one embodiment, when the computer program is executed by the processor, drawing a plumb line at the target position of each information unit to obtain the intersection point of the plumb line and the three-dimensional model includes: drawing a plumb line at the target position of each information unit Lines to obtain at least one initial intersection point between the plumb line and the 3D model; filter the initial intersection points according to a preset method to obtain the intersection point between the plumb line and the model.
在一个实施例中,计算机程序被处理器执行时所实现的基于三维模型,提取得到多个信息单元,并根据多个信息单元以及三维模型,得到目标区域信息是通过预先基于工作流构建的信息提取模型根据预设参数运行后得到的。In one embodiment, when the computer program is executed by the processor, multiple information units are extracted based on the 3D model, and the information of the target area is obtained based on the multiple information units and the 3D model through the information constructed in advance based on the workflow The extraction model is obtained after running according to preset parameters.
在一个实施例中,提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:接收目标物体图像;根据目标物体图像,构建与目标物体图像相对应的三维模型;基于三维模型得到目标基准面,并对目标基准面进行单元提取得到多个信息单元;对满足目标条件的信息单元进行计算得到目标区域信息。In one embodiment, a computer program product is provided, including a computer program. When the computer program is executed by a processor, the following steps are implemented: receiving an image of a target object; constructing a three-dimensional model corresponding to the image of the target object according to the image of the target object ; The target datum plane is obtained based on the three-dimensional model, and a plurality of information units are obtained by unit extraction of the target datum plane; information units satisfying the target condition are calculated to obtain target area information.
在一个实施例中,计算机程序被处理器执行时所实现的接收目标物体图像;根据目标物体图像,构建与目标物体图像相对应的三维模型;基于三维模型得到目标基准面,并对目标基准面进行单元提取得到多个信息单元;对满足目标条件的信息单元进行计算得到目标区域信息。In one embodiment, when the computer program is executed by the processor, the image of the target object is received; according to the image of the target object, a three-dimensional model corresponding to the image of the target object is constructed; the target reference plane is obtained based on the three-dimensional model, and the target reference plane is Perform unit extraction to obtain multiple information units; calculate information units that meet the target conditions to obtain target area information.
在一个实施例中,计算机程序被处理器执行时所实现的基于三维模型得到目标基准面,并对目标基准面进行提取得到多个信息单元,包括:在三维模型中进行目标检测,得到目标立方体;将目标立方体进行投影,得到目标基准面;根据预设阈值对目标基准面进行切割,得到多个信息单元。In one embodiment, when the computer program is executed by the processor, the target reference plane is obtained based on the three-dimensional model, and the target reference plane is extracted to obtain multiple information units, including: performing target detection in the three-dimensional model to obtain the target cube ;Project the target cube to obtain the target reference plane; cut the target reference plane according to the preset threshold to obtain multiple information units.
在一个实施例中,计算机程序被处理器执行时所实现的对满足目标条件的信息单元进行计算得到目标区域信息,包括:在各个信息单元的目标位置绘制铅垂线,得到铅垂线与三维模型的交点;当交点为目标交点时,判定目标交点所在的信息单元满足目标条件;提取目标交点所在的信息单元,并根据目标交点所在的信息单元进行得到目标区域信息。In one embodiment, when the computer program is executed by the processor, the calculation of the information units satisfying the target conditions to obtain the target area information includes: drawing a plumb line at the target position of each information unit to obtain the vertical line and the three-dimensional The intersection point of the model; when the intersection point is the target intersection point, it is determined that the information unit where the target intersection point is located meets the target condition; the information unit where the target intersection point is located is extracted, and the target area information is obtained according to the information unit where the target intersection point is located.
在一个实施例中,计算机程序被处理器执行时所实现的目标交点的判定方式,包括:根据交点,得到基准面;根据基准面以及预设数值对交点进行判断;当交点与基准面的差值大于预设数值时,判定交点为目标交点。In one embodiment, the method for judging the target intersection point realized when the computer program is executed by the processor includes: obtaining the reference plane according to the intersection point; judging the intersection point according to the reference plane and a preset value; when the difference between the intersection point and the reference plane When the value is greater than the preset value, it is judged that the intersection point is the target intersection point.
在一个实施例中,计算机程序被处理器执行时所实现的在各个信息单元的目标位置绘制铅垂线,得到铅垂线与三维模型的交点,包括:在各个信息单元的目标位置绘制铅垂线,得到至少一个铅垂线与三维模型的初始交点;根据预设方法从初始交点中进行筛选,得到铅垂线与模型的交点。In one embodiment, when the computer program is executed by the processor, drawing a plumb line at the target position of each information unit to obtain the intersection point of the plumb line and the three-dimensional model includes: drawing a plumb line at the target position of each information unit Lines to obtain at least one initial intersection point between the plumb line and the 3D model; filter the initial intersection points according to a preset method to obtain the intersection point between the plumb line and the model.
在一个实施例中,计算机程序被处理器执行时所实现的基于三维模型,提取得到多个信息单元,并根据多个信息单元以及三维模型,得到目标区域信息是通过预先基于工作流构建的信息提取模型根据预设参数运行后得到的。In one embodiment, when the computer program is executed by the processor, multiple information units are extracted based on the 3D model, and the information of the target area is obtained based on the multiple information units and the 3D model through the information constructed in advance based on the workflow The extraction model is obtained after running according to preset parameters.
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一非易失性计算机可读取存储介质中,该计算机程序在执行时,可包括如上述各方法的实施例的流程。其中,本申请所提供的各实施例中所使用的对存储器、数据库或其它介质的任何引用,均可包括非易失性和易失性存储器中的至少一种。非易失性存储器可包括只读存储器(Read-OnlyMemory,ROM)、磁带、软盘、闪存、光存储器、高密度嵌入式非易失性存储器、阻变存储器(ReRAM)、磁变存储器(Magnetoresistive Random Access Memory,MRAM)、铁电存储器(Ferroelectric Random Access Memory,FRAM)、相变存储器(Phase Change Memory,PCM)、石墨烯存储器等。易失性存储器可包括随机存取存储器(Random Access Memory,RAM)或外部高速缓冲存储器等。作为说明而非局限,RAM可以是多种形式,比如静态随机存取存储器(Static Random Access Memory,SRAM)或动态随机存取存储器(Dynamic RandomAccess Memory,DRAM)等。本申请所提供的各实施例中所涉及的数据库可包括关系型数据库和非关系型数据库中至少一种。非关系型数据库可包括基于区块链的分布式数据库等,不限于此。本申请所提供的各实施例中所涉及的处理器可为通用处理器、中央处理器、图形处理器、数字信号处理器、可编程逻辑器、基于量子计算的数据处理逻辑器等,不限于此。Those of ordinary skill in the art can understand that all or part of the processes in the methods of the above embodiments can be implemented through computer programs to instruct related hardware, and the computer programs can be stored in a non-volatile computer-readable memory In the medium, when the computer program is executed, it may include the processes of the embodiments of the above-mentioned methods. Wherein, any reference to storage, database or other media used in the various embodiments provided in the present application may include at least one of non-volatile and volatile storage. Non-volatile memory can include read-only memory (Read-Only Memory, ROM), magnetic tape, floppy disk, flash memory, optical memory, high-density embedded non-volatile memory, resistive variable memory (ReRAM), magnetic variable memory (Magnetoresistive Random Access Memory, MRAM), Ferroelectric Random Access Memory (FRAM), Phase Change Memory (Phase Change Memory, PCM), graphene memory, etc. The volatile memory may include random access memory (Random Access Memory, RAM) or external cache memory. As an illustration and not a limitation, the RAM can be in various forms, such as static random access memory (Static Random Access Memory, SRAM) or dynamic random access memory (Dynamic Random Access Memory, DRAM). The databases involved in the various embodiments provided in this application may include at least one of a relational database and a non-relational database. The non-relational database may include a blockchain-based distributed database, etc., but is not limited thereto. The processors involved in the various embodiments provided by this application can be general-purpose processors, central processing units, graphics processors, digital signal processors, programmable logic devices, data processing logic devices based on quantum computing, etc., and are not limited to this.
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。The technical features of the above embodiments can be combined arbitrarily. To make the description concise, all possible combinations of the technical features in the above embodiments are not described. However, as long as there is no contradiction in the combination of these technical features, they should be It is considered to be within the range described in this specification.
以上所述实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本申请专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请的保护范围应以所附权利要求为准。The above-mentioned embodiments only express several implementation modes of the present application, and the description thereof is relatively specific and detailed, but should not be construed as limiting the patent scope of the present application. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present application, and these all belong to the protection scope of the present application. Therefore, the protection scope of the present application should be determined by the appended claims.
Claims (10)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211108952.6A CN115457413A (en) | 2022-09-13 | 2022-09-13 | Information extraction method, device, computer equipment, storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211108952.6A CN115457413A (en) | 2022-09-13 | 2022-09-13 | Information extraction method, device, computer equipment, storage medium |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN115457413A true CN115457413A (en) | 2022-12-09 |
Family
ID=84303494
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211108952.6A Pending CN115457413A (en) | 2022-09-13 | 2022-09-13 | Information extraction method, device, computer equipment, storage medium |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115457413A (en) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20090304227A1 (en) * | 2008-02-01 | 2009-12-10 | Daniel Ian Kennedy | Methods and Systems for Provisioning Energy Systems |
| US20170236024A1 (en) * | 2016-02-15 | 2017-08-17 | Pictometry International Corp. | Automated system and methodology for feature extraction |
| CN113409197A (en) * | 2021-07-15 | 2021-09-17 | 广州文悦信息科技有限公司 | Intelligent mapping data information processing method |
| CN114706868A (en) * | 2022-04-01 | 2022-07-05 | 深圳深略智慧信息服务有限公司 | Surveying and mapping data acquisition system and method based on geospatial information data surveying and mapping |
-
2022
- 2022-09-13 CN CN202211108952.6A patent/CN115457413A/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20090304227A1 (en) * | 2008-02-01 | 2009-12-10 | Daniel Ian Kennedy | Methods and Systems for Provisioning Energy Systems |
| US20170236024A1 (en) * | 2016-02-15 | 2017-08-17 | Pictometry International Corp. | Automated system and methodology for feature extraction |
| CN113409197A (en) * | 2021-07-15 | 2021-09-17 | 广州文悦信息科技有限公司 | Intelligent mapping data information processing method |
| CN114706868A (en) * | 2022-04-01 | 2022-07-05 | 深圳深略智慧信息服务有限公司 | Surveying and mapping data acquisition system and method based on geospatial information data surveying and mapping |
Non-Patent Citations (1)
| Title |
|---|
| TIM COX等: "Real Time Collision Dectection", vol. 1, 31 December 2005, MORGAN KAUFMANN, pages: 82 * |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12340525B2 (en) | High-definition map creation method and device, and electronic device | |
| CN111008422B (en) | A method and system for making a real-world map of a building | |
| CN111103595B (en) | Method and device for generating digital line drawing | |
| CN109934911B (en) | OpenGL-based three-dimensional modeling method for high-precision oblique photography of mobile terminal | |
| CN113112603A (en) | Method and device for optimizing three-dimensional model | |
| CN113743155A (en) | Method for constructing multi-detail level model of object and computer equipment | |
| CN115393240A (en) | Method, device, electronic equipment and readable storage medium for GIS and BIM integration | |
| US20180101981A1 (en) | Smoothing 3d models of objects to mitigate artifacts | |
| Ergun et al. | Level of detail (LoD) geometric analysis of relief mapping employing 3D modeling via UAV images in cultural heritage studies | |
| CN116630830A (en) | Method and system for presenting full-space information flow of power pipeline based on oblique photography | |
| CN116894912A (en) | Virtual construction sandbox construction method and device based on integration of 3D GIS and BIM | |
| CN119027607A (en) | Virtual geographic scene fusion modeling method, device and computer equipment | |
| CN115033728B (en) | Global satellite image search engine data crawling and normalization method and system | |
| CN103236083B (en) | Real-time three-dimensional measuring method based on stereo image library | |
| CN109405807B (en) | Partitioning method for three-dimensional reconstruction of large-scene oblique image | |
| CN110377776B (en) | Method and device for generating point cloud data | |
| CN119445006B (en) | Three-dimensional digital content generation method, device, system, equipment, medium and product | |
| CN116030116A (en) | Landfill volume analysis method and device, electronic equipment and storage medium | |
| CN113496550B (en) | DSM calculation method and device, computer equipment and storage medium | |
| CN115457413A (en) | Information extraction method, device, computer equipment, storage medium | |
| CN107833278B (en) | Terrain simulation method and device and electronic equipment | |
| CN119068410A (en) | A real-time monitoring method, device, equipment and medium for excavation volume | |
| CN115840927A (en) | Data fusion method and device of BIM model and GIS model and electronic equipment | |
| CN113343973A (en) | Depth estimation method, storage medium, and computer device | |
| CN112446959A (en) | Oblique photography model optimization method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |