CN114545864A - Friction compensation control method of electro-hydraulic servo system - Google Patents
Friction compensation control method of electro-hydraulic servo system Download PDFInfo
- Publication number
- CN114545864A CN114545864A CN202210222556.XA CN202210222556A CN114545864A CN 114545864 A CN114545864 A CN 114545864A CN 202210222556 A CN202210222556 A CN 202210222556A CN 114545864 A CN114545864 A CN 114545864A
- Authority
- CN
- China
- Prior art keywords
- friction
- electro
- hydraulic servo
- servo system
- control method
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form
- G05B19/414—Structure of the control system, e.g. common controller or multiprocessor systems, interface to servo, programmable interface controller
- G05B19/4142—Structure of the control system, e.g. common controller or multiprocessor systems, interface to servo, programmable interface controller characterised by the use of a microprocessor
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/34—Director, elements to supervisory
- G05B2219/34013—Servocontroller
Landscapes
- Engineering & Computer Science (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Human Computer Interaction (AREA)
- Manufacturing & Machinery (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Feedback Control In General (AREA)
Abstract
Description
技术领域technical field
本发明涉及一种电液伺服系统摩擦补偿控制方法,属于高精度伺服控制系统的技术领域。The invention relates to a friction compensation control method of an electro-hydraulic servo system, belonging to the technical field of high-precision servo control systems.
背景技术Background technique
随着对电液伺服系统控制精度要求的提高,摩擦已成为一个不可忽略的重要问题。非线性摩擦对系统的动态及静态性能的影响很大,主要表现为低速时的爬行现象、速度过零时的波形畸变现象、稳态时有较大的静差,甚至出现不期望的极限环振荡。因此,为提高电液伺服系统的位置控制精度和改变系统的低速性能,其控制器需要实现对摩擦的补偿控制。With the improvement of the control precision requirements of electro-hydraulic servo system, friction has become an important problem that cannot be ignored. Non-linear friction has a great influence on the dynamic and static performance of the system, mainly manifested as creeping phenomenon at low speed, waveform distortion when the speed crosses zero, large static error at steady state, and even unexpected limit cycles. oscillation. Therefore, in order to improve the position control accuracy of the electro-hydraulic servo system and change the low-speed performance of the system, its controller needs to realize the compensation control of friction.
为了消除摩擦带来的影响,提高系统的控制性能很大程度取决于所建立的数学模型能否准确地反映摩擦特性。现有的电液伺服系统控制器的摩擦模型一般采用简化的非线性摩擦模型,如:库伦模型、库伦加滑动摩擦模型或Stribeck模型等,但实际的摩擦具有更复杂的非线性特性,采用简化的摩擦模型难以描述真实的摩擦特性。In order to eliminate the influence of friction, improving the control performance of the system depends to a large extent on whether the established mathematical model can accurately reflect the friction characteristics. The friction model of the existing electro-hydraulic servo system controller generally adopts a simplified nonlinear friction model, such as the Coulomb model, the Coulomb sliding friction model or the Stribeck model, etc., but the actual friction has more complex nonlinear characteristics. The friction model is difficult to describe the real friction characteristics.
电液伺服系统作为一个多变量、非线性和强耦合的被控现象,具有非线性和不确定性等特性。欲实现高精度伺服控制,必须克服非线性摩擦对系统性能造成的影响。传统的反馈控制策略,如高增益PID控制方法,且有结构简单、易实现等优点,通常在参数匹配的情况下可获得较好的性能,但在实际工程中过高的增益会导致系统振荡,失稳。利用自抗扰控制器(Active Disturbance Rejection Control,简称ADRC)中的扩张状态观测器对摩擦进行估计并补偿,该补偿控制方法既不依赖对象模型又不依赖摩擦模型,算法简单,鲁棒性强,易于工程应用。As a multivariable, nonlinear and strongly coupled controlled phenomenon, electro-hydraulic servo system has the characteristics of nonlinearity and uncertainty. To achieve high-precision servo control, the impact of nonlinear friction on system performance must be overcome. Traditional feedback control strategies, such as high-gain PID control methods, have the advantages of simple structure and easy implementation. Usually, better performance can be obtained under the condition of parameter matching, but in practical engineering, excessive gain will lead to system oscillation. , unstable. The extended state observer in Active Disturbance Rejection Control (ADRC) is used to estimate and compensate for friction. The compensation control method does not depend on the object model nor the friction model, and the algorithm is simple and robust. , easy for engineering application.
发明内容SUMMARY OF THE INVENTION
针对现有技术的以上缺陷或改进需求,本发明提供了一种电液伺服系统摩擦补偿控制方法及其应用,由此解决现有的电液伺服系统存在低速运动时定位精度低、高速运动时跟随误差较大的技术问题。In view of the above defects or improvement requirements of the prior art, the present invention provides a friction compensation control method for an electro-hydraulic servo system and its application, thereby solving the problems of low positioning accuracy and high-speed motion in the existing electro-hydraulic servo system. Technical problems with large following errors.
为实现以上的技术目的,本发明将采样以下的技术方案:In order to realize the above technical purpose, the present invention will sample the following technical solutions:
一种电液伺服系统摩擦补偿控制方法,首先采集电液伺服系统的系统流量、供油压力、加速度等信号,利用改进LuGre摩擦模型对系统摩擦进行建模,应用遗传算法离线辨识其参数,并利用辨识模型产生的估计值进行前馈补偿,然后引入了平滑性更好的类双曲正弦函数设计变系数自抗扰控制器的非线性状态误差反馈和扩张状态观测器部分,并在此基础上结合模糊自适应控制方法,通过误差和误差微分对非线性状态反馈系数进行调节,实现电液伺服系统在摩擦影响下的控制。A friction compensation control method for an electro-hydraulic servo system. Firstly, the system flow, oil supply pressure, acceleration and other signals of the electro-hydraulic servo system are collected, and the system friction is modeled by the improved LuGre friction model. The estimated value generated by the identification model is used for feedforward compensation, and then the nonlinear state error feedback and the extended state observer part of the variable coefficient ADRC controller designed by the hyperbolic sine function with better smoothness are introduced. Combined with the fuzzy adaptive control method, the nonlinear state feedback coefficient is adjusted through the error and error differential to realize the control of the electro-hydraulic servo system under the influence of friction.
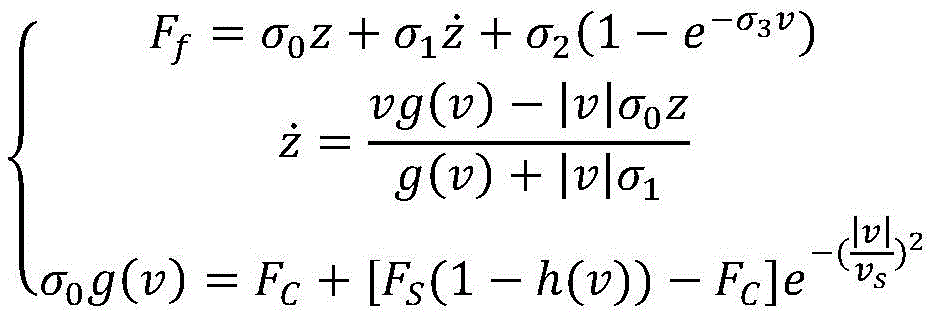
所述改进LuGre摩擦模型,其表达式为:The improved LuGre friction model is expressed as:
其中,v为两物体相对速度(m/s),σ0为刚性系数(N/m),σ1为阻尼系数(N·s/m),z为鬃毛的平均形变,σ2为黏性摩擦斜率因子(N),σ3为黏性摩擦变化因子(s/m),vs为Stribeck效应速度(m/s),h(v)为润滑油膜,其数学表达式如下:where v is the relative velocity of the two objects (m/s), σ 0 is the stiffness coefficient (N/m), σ 1 is the damping coefficient (N s/m), z is the average deformation of the bristles, and σ 2 is the viscosity The friction slope factor (N), σ3 is the viscous friction variation factor (s/m), v s is the Stribeck effect velocity (m/s), h(v) is the lubricating oil film, and its mathematical expression is as follows:

式中:fC为库仑摩擦力(N),FS为静摩擦力(N),γh为润滑厚度的时间常数,hss为稳态油膜厚度,只在负阻尼和外力保持不变的情况下可变,v1和v2为临界速度,且0<v1<v2。In the formula: f C is the Coulomb friction force (N), F S is the static friction force (N), γ h is the time constant of the lubrication thickness, h ss is the steady-state oil film thickness, only when the negative damping and external force remain unchanged Variable down, v 1 and v 2 are critical speeds, and 0<v 1 <v 2 .
所述改进LuGre摩擦模型中,各摩擦参数采用遗传算法进行离线辨识,并利用辨识模型产生的估计值进行前馈补偿。In the improved LuGre friction model, the genetic algorithm is used for offline identification of each friction parameter, and the estimated value generated by the identification model is used for feedforward compensation.
所述自抗扰控制器包括跟踪微分器、扩张状态观测器以及非线性控制率,所述跟踪微分器和非线性控制率为给定的位置信号安排过渡过程;所述扩张状态观测器观测和补偿摩擦前馈补偿量的过补偿和欠补偿、所述电液伺服系统摩擦建模误差所产生的不确定性以及外界扰动;以维持所述电液伺服系统的稳定性和有限时间收敛。The ADRC includes a tracking differentiator, an extended state observer and a nonlinear control rate, the tracking differentiator and the nonlinear control rate arrange a transition process for a given position signal; the extended state observer observes and Over-compensation and under-compensation of the friction feedforward compensation amount, the uncertainty generated by the friction modeling error of the electro-hydraulic servo system, and the external disturbance are compensated, so as to maintain the stability and finite-time convergence of the electro-hydraulic servo system.
进一步地,所述跟踪微分器基于以下公式建立:Further, the tracking differentiator is established based on the following formula:

其中,fh=fhan(x1,x2,r,h)是最优控制综合函数,其形式如下:Among them, fh=fhan(x 1 , x 2 , r, h) is the optimal control synthesis function, and its form is as follows:
式中,x1、x2为系统信号状态,r为控制量增益,u为输入信号,h为采样步长,h1为快速因子。对于不同系统,调节参数r和选择合适的h1,就可以以很高的精度逼近原信号,并获取相应的微分信号。In the formula, x 1 and x 2 are the system signal states, r is the gain of the control quantity, u is the input signal, h is the sampling step size, and h 1 is the fast factor. For different systems, by adjusting the parameter r and selecting an appropriate h 1 , the original signal can be approximated with high precision, and the corresponding differential signal can be obtained.
进一步地,所述非线性状态误差反馈基于以下公式建立:Further, the nonlinear state error feedback is established based on the following formula:
1.非线性组合1. Nonlinear combination
u0=kpatanh(x1,e1,δ1)+kd1atanh(x2,e2,δ2)+kd2atanh(x3,Z3,δ3)u 0 = k pa atanh(x 1 ,e 1 ,δ 1 )+k d1 atanh(x 2 ,e 2 ,δ 2 )+k d2 atanh(x 3 ,Z 3 ,δ 3 )
其中,δ为线性段的区间长度,e1为指令信号与被控对象输出的信号之差,e2为指令信号微分与输出微分之差,kp、kd1、kd2为非线性增益可调参数。Among them, δ is the interval length of the linear segment, e 1 is the difference between the command signal and the signal output by the controlled object, e 2 is the difference between the command signal differential and the output differential, k p , k d1 , and k d2 are the nonlinear gain. Adjust parameters.
2.非线性增益可调参数2. Non-linear gain adjustable parameters
考虑到存在摩擦干扰,位置传递函数简化为三阶,电液伺服系统理想模型为:Considering the existence of frictional interference, the position transfer function is simplified to the third order, and the ideal model of the electro-hydraulic servo system is:
考虑到存在干扰f,则上式可以写为:Considering the existence of interference f, the above formula can be written as:

其中,函数:Among them, the function:

Ff作为建模的摩擦力矩确知部分并入扩张状态观测器中,能够减轻观测器负担,起到模型辅助的作用。将表示实时作用量的状态反馈到控制端,非线性反馈参数比较多,为了使得参数容易选取,可以把所有的极点配置在同一处,使系统控制输入变为


将其代入上式,可得:Substituting it into the above formula, we get:

可得极点为:
由于实际执行器输出存在阈值,所以对控制器限幅:Limiting the controller due to the presence of a threshold on the actual actuator output:
式中,umax为适应执行器输出饱和特性设定的控制信号最大值。In the formula, u max is the maximum value of the control signal set to adapt to the output saturation characteristics of the actuator.
进一步地,所述扩张状态观测器基于以下公式建立:Further, the expanded state observer is established based on the following formula:

采用类双曲正弦函数抑制信号抖振Suppression of signal chattering by using quasi-hyperbolic sine function
式中,β1、β2、β3、β4为可调参数,作为状态误差的反馈增益,b0为放大系数。所述通过误差和误差微分对非线性状态反馈系数进行调节,非线性增益可调参数kp、kd1、kd2相当于比例和微分增益,对于任一通道,模糊自适应ADRC控制器以误差e1和误差微分e2作为输入,利用模糊控制规则在线对参数kp、kd1、kd2修正,以满足不同时刻的e1和e2对ADRC参数整定的要求。In the formula, β 1 , β 2 , β 3 , and β 4 are adjustable parameters, which are the feedback gain of the state error, and b 0 is the amplification factor. The nonlinear state feedback coefficient is adjusted through the error and error differentiation, and the nonlinear gain adjustable parameters k p , k d1 , and k d2 are equivalent to proportional and differential gains. For any channel, the fuzzy adaptive ADRC controller uses the error The parameters k p , k d1 , and k d2 are modified online by using the fuzzy control rules with e 1 and the error differential e 2 as input, so as to meet the requirements of e 1 and e 2 for ADRC parameter tuning at different times.
总体而言,通过本发明所构思的以上技术方案与现有技术相比,可以实现下列有益结果:In general, compared with the prior art, the following beneficial results can be achieved by the above technical solutions conceived by the present invention:
1)本发明应用遗传算法离线辨识摩擦模型参数,以仿真摩擦力与采集的摩擦力之差最小为目的优化摩擦模型的参数,辨识速度快,同时辨识后进一步判断参数是否符合要求,进一步提高辨识结果的准确率。不需要知道参数的具体初值,只要一个参数的范围即可进行优化搜索,同时又能避免局部极小,适应范围广,鲁棒性强。1) The present invention uses genetic algorithm to identify friction model parameters offline, and optimizes the parameters of the friction model for the purpose of minimizing the difference between the simulated friction force and the collected friction force, and the identification speed is fast. accuracy of the results. There is no need to know the specific initial value of the parameter, and the optimization search can be carried out as long as a range of parameters is required, and at the same time, the local minima can be avoided, the adaptability is wide, and the robustness is strong.
2)本发明基于LuGre摩擦模型进行改进,能较全面反映摩擦非线性特性,对电液伺服系统摩擦状态的拟合精度更高,提高动力学分析与仿真的精度,有效地节约时间和计算成本。2) The present invention is improved based on the LuGre friction model, which can reflect the nonlinear characteristics of friction more comprehensively, has higher fitting accuracy to the friction state of the electro-hydraulic servo system, improves the accuracy of dynamic analysis and simulation, and effectively saves time and calculation costs. .
3)本发明通过对电液伺服系统的摩擦力进行建模预测,进一步基于摩擦力的前馈补偿,可以提高速度的稳定性以及动作的位置精度,补偿摩擦特性漂移变化,弥补其在速度过零时补偿能力有限的缺陷,提高系统的鲁棒性,易于实现。3) By modeling and predicting the friction force of the electro-hydraulic servo system and further based on the feedforward compensation of the friction force, the present invention can improve the stability of the speed and the positional accuracy of the action, compensate for the drift change of the friction characteristics, and make up for its excessive speed. Zero-time compensation for the defects of limited ability, improve the robustness of the system, and easy to implement.
4)本发明通过ESO观测出系统中建模误差带来的不确定性、摩擦的过补偿或欠补偿和外界扰动,并用此观测值补偿,降低了基于摩擦模型的摩擦补偿方法对摩擦模型及其辨识精度的依赖,同时保证了系统抗扰动能力。4) The present invention observes the uncertainty, over-compensation or under-compensation of friction and external disturbances caused by modeling errors in the system through ESO, and uses this observation to compensate, reducing the friction model-based friction compensation method. It depends on the identification accuracy, and at the same time ensures the anti-disturbance capability of the system.
附图说明Description of drawings
图1为本发明方法中设计的电液伺服系统摩擦补偿控制方法系统框图;Fig. 1 is the system block diagram of the friction compensation control method of electro-hydraulic servo system designed in the method of the present invention;
图2为本发明实施例中实验和辨识摩擦模型力矩图;Fig. 2 is the torque diagram of experiment and identification friction model in the embodiment of the present invention;
图3为本发明中类双曲正弦函数示意图;3 is a schematic diagram of a hyperbolic sine function of the present invention;
图4为本发明中增益优化参数模糊规则图;Fig. 4 is gain optimization parameter fuzzy rule diagram in the present invention;
图5为本发明实施例中不同控制器对正弦信号位置跟踪误差曲线;Fig. 5 is the error curve of the sinusoidal signal position tracking by different controllers in the embodiment of the present invention;
图6为本发明实施例中不同控制器对三角波信号位置跟踪误差曲线。FIG. 6 is an error curve of the position tracking of the triangular wave signal by different controllers in the embodiment of the present invention.
具体实施方式Detailed ways
附图非限制地公开了本发明所涉及一个优选实施例的结构示意图,以下将结合附图详细地说明本发明的技术方案。The accompanying drawings disclose, without limitation, a schematic structural diagram of a preferred embodiment of the present invention, and the technical solutions of the present invention will be described in detail below with reference to the accompanying drawings.
如图1所示,其公开了本发明所述一种电液伺服系统摩擦补偿控制方法的系统框图,根据采集电液伺服系统的系统流量、供油压力、加速度等信号,利用改进LuGre摩擦模型对系统摩擦进行建模,应用遗传算法离线辨识其参数,并利用辨识模型产生的估计值进行前馈补偿,然后引入了平滑性更好的类双曲正弦函数设计自抗扰控制器的非线性状态误差反馈和扩张状态观测器部分,并在此基础上结合模糊自适应控制方法,通过误差和误差微分对非线性状态反馈系数进行调节,实现电液伺服系统在摩擦影响下的控制。As shown in Figure 1, it discloses a system block diagram of a friction compensation control method for an electro-hydraulic servo system according to the present invention. The system friction is modeled, the genetic algorithm is used to identify its parameters off-line, and the estimated value generated by the identification model is used for feedforward compensation, and then a smoother quasi-hyperbolic sine function is introduced to design the nonlinearity of the active disturbance rejection controller. The state error feedback and the expanded state observer are combined with the fuzzy adaptive control method, and the nonlinear state feedback coefficient is adjusted through the error and error differential to realize the control of the electro-hydraulic servo system under the influence of friction.
具体地说:所述的一种电液伺服系统摩擦补偿控制方法包括以下四个步骤:Specifically, the friction compensation control method for an electro-hydraulic servo system includes the following four steps:
第一步:选择系统摩擦模型Step 1: Select the system friction model
其中,v为两物体相对速度(m/s),σ0为刚性系数(N/m),σ1为阻尼系数(N·s/m),z为鬃毛的平均形变,σ2为黏性摩擦斜率因子(N),σ3为黏性摩擦变化因子(s/m),vs为Stribeck效应速度(m/s),h(v)为润滑油膜,其数学表达式如下:where v is the relative velocity of the two objects (m/s), σ 0 is the stiffness coefficient (N/m), σ 1 is the damping coefficient (N s/m), z is the average deformation of the bristles, and σ 2 is the viscosity The friction slope factor (N), σ3 is the viscous friction variation factor (s/m), v s is the Stribeck effect velocity (m/s), h(v) is the lubricating oil film, and its mathematical expression is as follows:


式中:FC为库仑摩擦力(N),FS为静摩擦力(N),γh为润滑厚度的时间常数,hss为稳态油膜厚度,只在负阻尼和外力保持不变的情况下可变,v1和v2为临界速度,且0<v1<v2。In the formula: F C is the Coulomb friction force (N), F S is the static friction force (N), γ h is the time constant of the lubrication thickness, h ss is the steady-state oil film thickness, only when the negative damping and external force remain unchanged Variable down, v 1 and v 2 are critical speeds, and 0<v 1 <v 2 .
第二步:摩擦模型参数辨识Step 2: Identification of friction model parameters
本发明采用遗传算法辨识系统摩擦参数。遗传算法是模拟生物在自然环境中的遗传和进化过程而形成的一种自适应全局优化的概率搜索算法。同基于梯度下降和最小二乘类优化方法对比,遗传算法在解决非线性问题时不要求对象的模型信息,只需要一个参数的范围即可进行优化搜索,同时又能避免局部极小,因此适应范围广,鲁棒性强。该方法具体如下:The invention adopts the genetic algorithm to identify the friction parameters of the system. Genetic algorithm is an adaptive global optimization probabilistic search algorithm formed by simulating the genetic and evolutionary process of organisms in the natural environment. Compared with the optimization methods based on gradient descent and least squares, the genetic algorithm does not require the model information of the object when solving nonlinear problems. Wide range and strong robustness. The method is as follows:
1.静态辨识(σ2、σ3、EC、FS、vs为待辨识静态参数)1. Static identification (σ 2 , σ 3 , E C , F S , and v s are the static parameters to be identified)
当系统处于稳态,即
稳态摩擦力Fss和速度v的关系表示为:The relationship between the steady state friction force F ss and the velocity v is expressed as:

确立采用遗传算法辨识获得的静态摩擦参数的辨识值为:It is established that the identification value of the static friction parameters obtained by the genetic algorithm identification is:

其中,M表示遗传算法的种群规模。Among them, M represents the population size of the genetic algorithm.
摩擦力的辨识值可以通过下式获得:The identification value of friction force can be obtained by the following formula:

则辨识误差为:Then the identification error is:

选取遗传算法的目标函数为:The objective function of the selected genetic algorithm is:
2.动态辨识(σ0、σ1、α、δ为待辨识动态参数)2. Dynamic identification (σ 0 , σ 1 , α, δ are dynamic parameters to be identified)
动力摩擦力参数辨识与静力摩擦力参数辨识的遗传算法程序几乎一样,在静力参数已知的情况下进行。The dynamic friction parameter identification is almost the same as the genetic algorithm procedure of the static friction parameter identification, and it is carried out under the condition that the static parameters are known.
遗传算法的步骤如下:The steps of the genetic algorithm are as follows:
步骤1初始化:种群规模设定为M=200,从而形成初始群体P(0),最大迭代次数取为i=20000;
步骤2个体评价:计算群体P(t)中每一组参数的适应度值;Step 2: Individual evaluation: Calculate the fitness value of each group of parameters in the population P(t);
步骤3选择运算:将选择算子作用于群体;Step 3 Selection operation: apply the selection operator to the group;
步骤4交叉运算:将交叉算子作用于群体;Step 4: Crossover operation: apply the crossover operator to the population;
步骤5变异运算:将变异算子作用于群体。群体P(t)经过选择、交叉、变异运算之后得到下一代群体P(t+1);
步骤6终止条件判断:判断是否符合终止条件,若符合则以进行过程中得到的具有最大适应度的个体作为最优解输出,终止计算;反正,则转到步骤2。Step 6: Judgment of termination conditions: Judging whether the termination conditions are met, if so, the individual with the largest fitness obtained in the process is used as the optimal solution output, and the calculation is terminated; otherwise, go to
第三步:基于摩擦模型前馈补偿Step 3: Feedforward compensation based on friction model
辨识结果如图2所示,由图1系统框图可知,根据辨识获得摩擦模型确定摩擦补偿值进行前馈补偿。The identification result is shown in Figure 2. From the system block diagram of Figure 1, it can be seen that the friction compensation value is determined according to the friction model obtained by the identification to perform feedforward compensation.
第四步:自抗扰控制器设计和实现Step 4: Active Disturbance Rejection Controller Design and Implementation
自抗扰控制器由三部分组成:跟踪微分器(TD),扩张状态观测器(ESO),非线性控制律(NLSEF)。Active disturbance rejection controller consists of three parts: tracking differentiator (TD), extended state observer (ESO), nonlinear control law (NLSEF).
1.跟踪微分器1. Tracking Differentiator
其中,fh=fhan(x1,x2,r,h)是最优控制综合函数,其形式如下:Among them, fh=fhan(x 1 , x 2 , r, h) is the optimal control synthesis function, and its form is as follows:
式中,x1、x2为系统信号状态,r为控制量增益,y为输入信号,h为采样步长,h1为快速因子。对于不同系统,调节参数r和选择合适的h1,就可以以很高的精度逼近原信号,并获取相应的微分信号。In the formula, x 1 and x 2 are the system signal states, r is the gain of the control quantity, y is the input signal, h is the sampling step size, and h 1 is the fast factor. For different systems, by adjusting the parameter r and selecting an appropriate h 1 , the original signal can be approximated with high precision, and the corresponding differential signal can be obtained.
2.非线性控制律2. Nonlinear control law
1)非线性组合1) Nonlinear combination
u0=kpatanh(x1,e1,δ1)+kd1atanh(x2,e2,δ2)+kd2atanh(x3,Z3,δ3)u 0 = k pa atanh(x 1 ,e 1 ,δ 1 )+k d1 atanh(x 2 ,e 2 ,δ 2 )+k d2 atanh(x 3 ,Z 3 ,δ 3 )

其中,δ为线性段的区间长度,e1为指令信号与被控对象输出的信号之差,e2为指令信号微分与输出微分之差,kp、kd1、kd2为非线性增益可调参数,atanh(x,e,δ)为类双曲正弦函数,其函数图像如图3所示。Among them, δ is the interval length of the linear segment, e 1 is the difference between the command signal and the signal output by the controlled object, e 2 is the difference between the command signal differential and the output differential, k p , k d1 , and k d2 are the nonlinear gain. Tuning parameters, atanh(x, e, δ) is a hyperbolic sine-like function, and its function image is shown in Figure 3.
2)非线性增益可调参数2) Nonlinear gain adjustable parameters
考虑到存在摩擦干扰,位置传递函数简化为三阶,电液伺服系统理想模型为:Considering the existence of frictional interference, the position transfer function is simplified to the third order, and the ideal model of the electro-hydraulic servo system is:

考虑到存在干扰f,则上式可以写为:Considering the existence of interference f, the above formula can be written as:

其中,函数:Among them, the function:

Ff作为建模的摩擦力矩确知部分并入扩张状态观测器中,能够减轻观测器负担,起到模型辅助的作用。将所有的极点配置在同一处,使系统控制输入变为


将其代入上式,可得:Substituting it into the above formula, we get:

可得极点为:
由于实际执行器输出存在阈值,所以对控制器限幅:Limiting the controller due to the presence of a threshold on the actual actuator output:

式中,umax为适应执行器输出饱和特性设定的控制信号最大值。In the formula, u max is the maximum value of the control signal set to adapt to the output saturation characteristics of the actuator.
3.扩张状态观测器3. Extended State Observer
采用类双曲正弦函数抑制信号抖振Suppression of signal chattering by using quasi-hyperbolic sine function
式中,β1、β2、β3、β4为可调参数,作为状态误差的反馈增益,b0为放大系数。In the formula, β 1 , β 2 , β 3 , and β 4 are adjustable parameters, which are the feedback gain of the state error, and b 0 is the amplification factor.
4.模糊自适应控制方法4. Fuzzy adaptive control method
假定非线性增益可调参数kp、kd1、kd2满足kp∈(kpmin,kpmax),kd1∈(kd1min,kd1max),kd2∈(kd2min,kd2max),为方便起见,将其归一化为0~1之间的数值。Assuming that the nonlinear gain adjustable parameters k p , k d1 , and k d2 satisfy k p ∈(k pmin ,k pmax ), k d1 ∈(k d1min ,k d1max ), k d2 ∈(k d2min ,k d2max ), as For convenience, it is normalized to a value between 0 and 1.
确立模糊规则如图4所示,其中e1论域为[-0.6,0.6],e2论域为[-0.06,0.06],{NBNS ZO PS PB}子集中各个元素分别表“负大,负小,零,正小,正大”,k1、k2、k3论域为[0,1],{S B}子集中各个元素分别表示“小,大”。解模糊器采用重心解模糊器,即可实时求出三通道的非线性增益优化参数kp、kd1、kd2。The establishment of fuzzy rules is shown in Figure 4, where the universe of discourse for e 1 is [-0.6, 0.6], the universe of discourse for e 2 is [-0.06, 0.06], and each element in the {NBNS ZO PS PB} subset represents "negative large, Negative small, zero, positive small, positive big", k 1 , k 2 , k 3 universes are [0,1], and each element in the {SB} subset represents "small, large" respectively. The defuzzifier adopts the centroid defuzzifier, and the three-channel nonlinear gain optimization parameters k p , k d1 , and k d2 can be obtained in real time.
优选地,给定期望轨迹为正弦曲线xid=20sin(0.4πt)mm,带摩擦时,典型自抗扰控制和本实施例控制方法(Fuzzy Variable Gain Active Disturbance Rejection ControlBased on Feedforward Friction Compensation,简称BFFAC)控制效果如图5所示,两者对比明显可见:采用典型自抗扰控制跟踪误差大,不能达到高精度控制;而本实施例方法的跟踪误差要小于典型自抗扰控制,满足高精度控制要求。给定期望轨迹为三角波曲线,带摩擦时,典型自抗扰控制和本实施例控制方法控制效果如图6所示,两者对比明显可见:采用典型自抗扰控制存在超调量变大的缺陷;而本实施例方法,由于ADRC事先安排了过渡过程,在提高系统响应快速性下还能同时保证具有较小的超调量。Preferably, the given desired trajectory is a sine curve x id =20sin(0.4πt)mm, with friction, the typical active disturbance rejection control and the control method of this embodiment (Fuzzy Variable Gain Active Disturbance Rejection ControlBased on Feedforward Friction Compensation, referred to as BFFAC ) control effect is shown in Figure 5, the comparison between the two is obvious: the tracking error of the typical ADRC control is large, and high-precision control cannot be achieved; while the tracking error of the method in this embodiment is smaller than that of the typical ADRC control, which satisfies high-precision control. Control requirements. Given the expected trajectory is a triangular wave curve, with friction, the control effect of the typical ADRC and the control method of this embodiment is shown in Figure 6. The comparison between the two is obvious: the use of the typical ADRC has the defect that the overshoot becomes larger. However, in the method of this embodiment, since ADRC arranges the transition process in advance, it can also ensure a small overshoot while improving the rapidity of the system response.
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,在不脱离本发明的精神和范围的情况下,本领域的普通技术人员还可以做出更多的变形和改进。因此所有等同的技术方案均应属于本发明的范畴并为本发明的各项权利要求所限定。Those skilled in the art can easily understand that the above are only preferred embodiments of the present invention and are not intended to limit the present invention. Without departing from the spirit and scope of the present invention, those of ordinary skill in the art can also Make more deformations and improvements. Therefore, all equivalent technical solutions should belong to the scope of the present invention and be defined by the various claims of the present invention.
Claims (7)










Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210222556.XA CN114545864B (en) | 2022-03-07 | 2022-03-07 | A friction compensation control method for electro-hydraulic servo system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210222556.XA CN114545864B (en) | 2022-03-07 | 2022-03-07 | A friction compensation control method for electro-hydraulic servo system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN114545864A true CN114545864A (en) | 2022-05-27 |
| CN114545864B CN114545864B (en) | 2025-02-25 |
Family
ID=81664280
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210222556.XA Active CN114545864B (en) | 2022-03-07 | 2022-03-07 | A friction compensation control method for electro-hydraulic servo system |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN114545864B (en) |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114738349A (en) * | 2022-06-09 | 2022-07-12 | 中国飞机强度研究所 | Loading compensation system and method in airplane vibration fatigue test |
| CN115729171A (en) * | 2022-11-23 | 2023-03-03 | 南京信息工程大学 | A Friction Compensation Control Method for Excavators Based on Stroke Characteristics |
| CN116236651A (en) * | 2022-12-29 | 2023-06-09 | 北京谊安医疗系统股份有限公司 | A pressure control system and method for a turbo ventilator |
| CN116300464A (en) * | 2023-03-27 | 2023-06-23 | 合肥工业大学 | A Neural Network Tracking Control Method for Two-Stage Inverted Pendulum System with Friction Compensation |
| CN117991719A (en) * | 2024-04-03 | 2024-05-07 | 华中科技大学 | Dynamic friction modeling and compensation method and system for robot grinding and polishing force control |
| CN119036470A (en) * | 2024-10-18 | 2024-11-29 | 江苏科技大学 | Mechanical arm joint friction identification method and system for ship bending plate forming |
| CN119356192A (en) * | 2024-12-23 | 2025-01-24 | 西安航晨机电科技股份有限公司 | A method and system for nonlinear electromechanical servo control based on orthogonal characteristics |
| CN119472506A (en) * | 2025-01-15 | 2025-02-18 | 深圳市拓智者科技有限公司 | Adaptive error compensation method and system for high-precision CNC machine tools |
| CN119526418A (en) * | 2024-12-20 | 2025-02-28 | 华中科技大学 | A force-stiffness closed-loop control method and system for variable stiffness actuator based on force feedback |
| CN119805931A (en) * | 2024-12-24 | 2025-04-11 | 国网湖北省电力有限公司宜城市供电公司 | A method for optimizing the gain of LADRC controller |
| CN119846958A (en) * | 2024-12-27 | 2025-04-18 | 华中科技大学 | Online identification method and equipment for friction model parameters of servo feeding system |
| CN121115469A (en) * | 2025-11-12 | 2025-12-12 | 重庆兰阀流体控制设备有限公司 | A smart control method and system based on electro-hydraulic linkage |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102208891A (en) * | 2010-11-18 | 2011-10-05 | 东南大学 | Method for controlling PMSM (permanent magnet synchronous motor) servo system based on friction and disturbance compensation |
| CN103401501A (en) * | 2013-04-15 | 2013-11-20 | 湖南大学 | Permanent magnet synchronous motor (PMSM) servo system control method based on fuzzy and active disturbance rejection control |
| JP2021002248A (en) * | 2019-06-24 | 2021-01-07 | 富士電機株式会社 | Friction compensation device |
| CN113325805A (en) * | 2021-06-09 | 2021-08-31 | 北京理工大学 | Active disturbance rejection controller and design method thereof |
| CN113934183A (en) * | 2021-11-22 | 2022-01-14 | 哈尔滨理工大学 | Electrohydraulic servo system friction compensation method based on improved firefly algorithm |
-
2022
- 2022-03-07 CN CN202210222556.XA patent/CN114545864B/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102208891A (en) * | 2010-11-18 | 2011-10-05 | 东南大学 | Method for controlling PMSM (permanent magnet synchronous motor) servo system based on friction and disturbance compensation |
| CN103401501A (en) * | 2013-04-15 | 2013-11-20 | 湖南大学 | Permanent magnet synchronous motor (PMSM) servo system control method based on fuzzy and active disturbance rejection control |
| JP2021002248A (en) * | 2019-06-24 | 2021-01-07 | 富士電機株式会社 | Friction compensation device |
| CN113325805A (en) * | 2021-06-09 | 2021-08-31 | 北京理工大学 | Active disturbance rejection controller and design method thereof |
| CN113934183A (en) * | 2021-11-22 | 2022-01-14 | 哈尔滨理工大学 | Electrohydraulic servo system friction compensation method based on improved firefly algorithm |
Non-Patent Citations (1)
| Title |
|---|
| 高炳微 等: "基于改进LuGre摩擦模型的阀控缸系统非线性控制策略研究", 《振动与冲击》, vol. 42, no. 11, 30 November 2023 (2023-11-30), pages 139 - 147 * |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114738349A (en) * | 2022-06-09 | 2022-07-12 | 中国飞机强度研究所 | Loading compensation system and method in airplane vibration fatigue test |
| CN114738349B (en) * | 2022-06-09 | 2022-08-26 | 中国飞机强度研究所 | Loading compensation system and method in airplane vibration fatigue test |
| CN115729171A (en) * | 2022-11-23 | 2023-03-03 | 南京信息工程大学 | A Friction Compensation Control Method for Excavators Based on Stroke Characteristics |
| CN116236651A (en) * | 2022-12-29 | 2023-06-09 | 北京谊安医疗系统股份有限公司 | A pressure control system and method for a turbo ventilator |
| CN116300464A (en) * | 2023-03-27 | 2023-06-23 | 合肥工业大学 | A Neural Network Tracking Control Method for Two-Stage Inverted Pendulum System with Friction Compensation |
| CN117991719A (en) * | 2024-04-03 | 2024-05-07 | 华中科技大学 | Dynamic friction modeling and compensation method and system for robot grinding and polishing force control |
| CN119036470A (en) * | 2024-10-18 | 2024-11-29 | 江苏科技大学 | Mechanical arm joint friction identification method and system for ship bending plate forming |
| CN119036470B (en) * | 2024-10-18 | 2025-10-21 | 江苏科技大学 | A method and system for identifying friction of manipulator joints for ship bending forming |
| CN119526418A (en) * | 2024-12-20 | 2025-02-28 | 华中科技大学 | A force-stiffness closed-loop control method and system for variable stiffness actuator based on force feedback |
| CN119356192A (en) * | 2024-12-23 | 2025-01-24 | 西安航晨机电科技股份有限公司 | A method and system for nonlinear electromechanical servo control based on orthogonal characteristics |
| CN119805931A (en) * | 2024-12-24 | 2025-04-11 | 国网湖北省电力有限公司宜城市供电公司 | A method for optimizing the gain of LADRC controller |
| CN119846958A (en) * | 2024-12-27 | 2025-04-18 | 华中科技大学 | Online identification method and equipment for friction model parameters of servo feeding system |
| CN119846958B (en) * | 2024-12-27 | 2025-11-21 | 华中科技大学 | A method and device for online identification of friction model parameters of a servo feed system |
| CN119472506A (en) * | 2025-01-15 | 2025-02-18 | 深圳市拓智者科技有限公司 | Adaptive error compensation method and system for high-precision CNC machine tools |
| CN121115469A (en) * | 2025-11-12 | 2025-12-12 | 重庆兰阀流体控制设备有限公司 | A smart control method and system based on electro-hydraulic linkage |
Also Published As
| Publication number | Publication date |
|---|---|
| CN114545864B (en) | 2025-02-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN114545864A (en) | Friction compensation control method of electro-hydraulic servo system | |
| CN113325805B (en) | Active disturbance rejection controller and design method thereof | |
| CN113934183B (en) | Electrohydraulic servo system friction compensation method based on improved firefly algorithm | |
| CN106094530B (en) | The Design of non-linear controllers method of inverted pendulum | |
| CN118502248B (en) | Data-driven five-degree-of-freedom overhead crane self-disturbance rejection sliding mode control method and system | |
| CN109828468B (en) | A control method for hysteresis nonlinear robot system | |
| CN115157238A (en) | Multi-degree-of-freedom robot dynamics modeling and trajectory tracking method | |
| CN113325716B (en) | Nonlinear Robust Control Method of Underwater Hydraulic Manipulator Based on Expanded Observer | |
| CN107263483B (en) | The control method for coordinating of two degrees of freedom articulated robot track | |
| CN109885077B (en) | Attitude control method and controller for four-rotor aircraft | |
| CN114047703A (en) | Model-free self-adaptive control method of piezoelectric ceramic micro-positioning platform | |
| CN111711407A (en) | A method for optimizing ADRC servo motor control based on RBF neural network | |
| CN115229798B (en) | Force impedance control method combining feedforward compensation and variable damping modeling | |
| CN116068893A (en) | Method, device and medium for self-adaptive fractional-order sliding mode control of a manipulator | |
| CN114412883A (en) | Hydraulic system control method, device, system and storage medium | |
| CN113110048A (en) | Nonlinear system output feedback adaptive control system and method adopting HOSM observer | |
| Zeng et al. | DDPG-based continuous thickness and tension coupling control for the unsteady cold rolling process | |
| CN117369271A (en) | Lithography machine workpiece stage motion control method based on adaptive adjustment and interference suppression | |
| CN112835295B (en) | Parameter identification and composite control method of piezoelectric ceramic actuator based on PI model | |
| CN113110305A (en) | Friction modeling method of electromechanical system and application thereof | |
| CN110440778B (en) | MEMS gyroscope non-overshoot protection performance fuzzy wavelet neural control method | |
| CN114211478B (en) | An optimal control method and system for coordinated operation of a modular manipulator | |
| CN117656084B (en) | Friction dynamics online identification method based on LuGre model | |
| CN119225180A (en) | Neural adaptive control method for hydraulic servo system based on state observer | |
| CN110788859B (en) | A Global Adaptive Adjustment System of Controller Parameters |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |