CN114511546A - A method for obtaining diameter at breast height of trees from laser point cloud based on DBSCAN clustering and four quadrants - Google Patents
A method for obtaining diameter at breast height of trees from laser point cloud based on DBSCAN clustering and four quadrants Download PDFInfo
- Publication number
- CN114511546A CN114511546A CN202210137082.9A CN202210137082A CN114511546A CN 114511546 A CN114511546 A CN 114511546A CN 202210137082 A CN202210137082 A CN 202210137082A CN 114511546 A CN114511546 A CN 114511546A
- Authority
- CN
- China
- Prior art keywords
- point
- tree
- center
- points
- point cloud
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images







Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/08—Measuring arrangements characterised by the use of optical techniques for measuring diameters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/43—Determining position using carrier phase measurements, e.g. kinematic positioning; using long or short baseline interferometry
- G01S19/44—Carrier phase ambiguity resolution; Floating ambiguity; LAMBDA [Least-squares AMBiguity Decorrelation Adjustment] method
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/23—Clustering techniques
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/24—Classification techniques
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10028—Range image; Depth image; 3D point clouds
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30181—Earth observation
- G06T2207/30188—Vegetation; Agriculture
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02A—TECHNOLOGIES FOR ADAPTATION TO CLIMATE CHANGE
- Y02A90/00—Technologies having an indirect contribution to adaptation to climate change
- Y02A90/10—Information and communication technologies [ICT] supporting adaptation to climate change, e.g. for weather forecasting or climate simulation
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Data Mining & Analysis (AREA)
- Theoretical Computer Science (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Bioinformatics & Computational Biology (AREA)
- Evolutionary Computation (AREA)
- General Engineering & Computer Science (AREA)
- Evolutionary Biology (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Electromagnetism (AREA)
- Computer Networks & Wireless Communication (AREA)
- Artificial Intelligence (AREA)
- Life Sciences & Earth Sciences (AREA)
- Quality & Reliability (AREA)
- Image Analysis (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Image Processing (AREA)
Abstract
本发明公开了一种基于DBSCAN聚类和四象限的激光点云林木胸径获取方法,包括以下步骤:一)采集测区林木激光点云数据;二)获取测区林木胸径处指定厚度点云,生成林木胸径点云文件;三)采用DBSCAN聚类方法对不同林木的胸径点云进行分组,获取单株林木胸径处及其支撑棍的点云集合;四)采用DBSCAN聚类方法进行分类,剔除单株林木周边支撑棍的噪声点,获得单株林木胸径处的点云集合;五)过滤噪声点,获取单株林木胸径最优点云集合;六)采用最小二乘计算法计算最优圆,获得树径和林木中心。本发明可以自动快速地分离每株林木胸径点云,并分割出单株林木最优胸径点集,然后进行计算,计算精确,智能化程度高,效率高。
The invention discloses a method for obtaining a diameter at breast height of a laser point cloud based on DBSCAN clustering and four quadrants, comprising the following steps: 1) collecting laser point cloud data of trees in a survey area; Generate tree diameter at breast height point cloud files; 3) Use DBSCAN clustering method to group the DBH point clouds of different trees, and obtain the point cloud collection of the diameter at breast height of a single tree and its supporting rods; 4) Use DBSCAN clustering method to classify and eliminate The noise points of the support rods around a single tree are obtained to obtain the point cloud set at the DBH of a single tree; 5) filter the noise points to obtain the optimal point cloud set of the DBH of a single tree; 6) use the least squares calculation method to calculate the optimal circle, Get tree trails and tree centers. The invention can automatically and quickly separate the DBH point cloud of each forest tree, and segment the optimal DBH point set of a single tree tree, and then perform the calculation, with accurate calculation, high intelligence and high efficiency.
Description
技术领域technical field
本发明涉及城市绿化林木调查测量技术领域,特别是一种基于DBSCAN聚类和四象限的激光点云林木胸径获取方法。The invention relates to the technical field of survey and measurement of urban greening forest trees, in particular to a method for obtaining the diameter at breast height of a laser point cloud based on DBSCAN clustering and four quadrants.
背景技术Background technique
随着社会的发展,人们对生活环境的要求越来越高,而城市绿化的功能也逐步被人们所熟知,这些功能与人们的身心健康、生存环境质量的改善和提高密切相关。城市绿化在城市中已经具有不可替代和估量的作用。而林木在城市绿化中占据着重要地位,为了对城市绿化资源进行维护,必须定期进行城市绿化资源调查,城市绿化资源调查的重点是城市绿化林木资源的调查。对林木资源的调查以测量林木的直径最为关键。在城市绿化工程中,林木直径也直接影响工程造价。With the development of society, people's requirements for living environment are getting higher and higher, and the functions of urban greening are gradually known by people. These functions are closely related to people's physical and mental health and the improvement and improvement of living environment quality. Urban greening has played an irreplaceable and measurable role in the city. Forests play an important role in urban greening. In order to maintain urban greening resources, it is necessary to conduct regular surveys of urban greening resources. In the investigation of forest resources, it is most critical to measure the diameter of the trees. In urban greening projects, the tree diameter also directly affects the project cost.
随着三维激光扫描技术的发展,三维激光扫描仪被广泛应用到林木胸径的获取工作中,通过对三维激光扫描数据进行数据处理得到林木胸径的激光点云数据,而针对激光点云的林木胸径提取工作目前主要采用人工在计算机及其图形设备(CAD)中判读出林木胸径点云所在位置,人工剔除噪声点,然后进行单株计算[基于单站三维激光扫描数据的林木胸径提取方法,柯敏等,浙江林业科技,2019,39(2),87-91],这种方法需要大量的人工参与,过滤噪声点,筛选点云数据,效率较低。With the development of 3D laser scanning technology, 3D laser scanners have been widely used in the acquisition of tree diameter at breast height. At present, the extraction work mainly uses the computer and its graphics equipment (CAD) to determine the location of the DBH point cloud, manually remove the noise points, and then calculate the individual tree [Diameter at breast height extraction method based on single-station 3D laser scanning data, Ke. Min et al., Zhejiang Forestry Science and Technology, 2019, 39(2), 87-91], this method requires a lot of manual participation, filtering noise points, filtering point cloud data, and the efficiency is low.
发明内容SUMMARY OF THE INVENTION
本发明为解决公知技术中存在的技术问题而提供一种基于DBSCAN聚类和四象限的激光点云林木胸径获取方法,该方法可以自动快速地分离每株林木胸径点云,并分割出单株林木最优胸径点集,然后进行计算,计算精确,智能化程度高,效率高。In order to solve the technical problems existing in the known technology, the present invention provides a method for obtaining the DBH of a laser point cloud based on DBSCAN clustering and four quadrants. The method can automatically and quickly separate the DBH point cloud of each tree, and segment a single tree The optimal DBH point set of forest trees is then calculated. The calculation is accurate, the degree of intelligence is high, and the efficiency is high.
本发明为解决公知技术中存在的技术问题所采取的技术方案是:一种基于DBSCAN聚类和四象限的激光点云林木胸径获取方法,包括以下步骤:The technical scheme adopted by the present invention to solve the technical problems existing in the known technology is: a method for obtaining the diameter at breast height of a laser point cloud based on DBSCAN clustering and four quadrants, comprising the following steps:
一)采用站式三维激光扫描仪,采集测区林木激光点云数据;1) Using a station-type 3D laser scanner to collect laser point cloud data of forest trees in the survey area;
二)对林木激光点云数据进行拼接、裁切、截取,获取测区林木胸径处指定厚度点云,生成林木胸径点云文件;2) Splicing, cutting and intercepting the laser point cloud data of trees, obtaining the point cloud of the specified thickness at the DBH of the tree in the survey area, and generating the DBH point cloud file;
三)采用DBSCAN聚类方法对不同林木的胸径点云进行分组,获取单株林木胸径处及其支撑棍的点云集合;3) The DBSCAN clustering method is used to group the DBH point clouds of different trees, and obtain the point cloud set of DBH of a single tree and its support rods;
四)采用DBSCAN聚类方法进行分类,剔除单株林木周边支撑棍的噪声点,获得单株林木胸径处的点云集合;4) The DBSCAN clustering method is used for classification, and the noise points of the support sticks around the single tree are removed to obtain the point cloud set at the DBH of the single tree;
五)过滤噪声点,获取单株林木胸径最优点云集合;5) Filter the noise points to obtain the cloud set of the optimal point at breast height of a single tree;
六)以最优点集为点集,以圆方程为基础方程,采用最小二乘计算法,计算该点集的最优圆,该最优圆半径即为林木直径,该最优圆中心即为林木中心。6) Taking the optimal point set as the point set and the circle equation as the basic equation, the least squares calculation method is used to calculate the optimal circle of the point set, the radius of the optimal circle is the diameter of the tree, and the center of the optimal circle is Forest Center.
所述步骤四)的方法为,对单株林木及林木支撑棍的点云集合,根据DBSCAN聚类方法,设定扫描半径为0.04米,最少扫描点数为7点,对单株林木与林木周边支撑棍点云数据进行分类,当点云分为一类时,则该点集为单株林木点集;当点集分为两类时,则点集点数较多的为单株林木点集;当点集分为三类时,首先判断是否有一类点集的点数是其他两类点集的5倍以上,如果是,则该点集为单株林木点集;如果否,计算三个分类点集中心点,形成三角形,角度最大的点集即为单株林木点集;当点集数量为四个以上时,计算各个类别点集的中心点和所有类别点集的中心点,接近所有类别点集中心点的点集为单株林木点集。The method of described step 4) is, to the point cloud collection of individual forest trees and forest support sticks, according to the DBSCAN clustering method, the setting scanning radius is 0.04 meters, and the minimum number of scanning points is 7 points. Support stick point cloud data for classification, when the point cloud is divided into one category, the point set is a single tree point set; when the point set is divided into two categories, the point set with more points is a single tree tree point set ; When the point set is divided into three categories, first determine whether there is one type of point set with more than 5 times the number of points of the other two types of point sets, if so, the point set is a single tree point set; if not, calculate three The center point of the classified point set forms a triangle, and the point set with the largest angle is the single tree point set; when the number of point sets is more than four, calculate the center point of each category point set and the center point of all category point sets, close to The point set of the center point of all category point sets is the single tree tree point set.
所述步骤五)的方法为,对单株林木点云集合求取均值,获取单株林木点云集合均值点,以均值点为中心点,将单株林木点云数据划分至四个象限;计算各象限中与中心点距离最远的点,将各象限离中心点最远的点与中心点按顺序构建三角形;计算各三角形单位面积内的点数,确定单位面积内点数最少的三角形为单株林木胸径圆心所在的三角形;The method of the step 5) is to obtain the mean value of the point cloud set of a single tree tree, obtain the mean value point of the point cloud set of a single tree tree tree, and take the mean value point as a center point, and divide the point cloud data of a single tree tree tree into four quadrants; Calculate the point that is farthest from the center point in each quadrant, and construct a triangle with the point farthest from the center point in each quadrant and the center point in order; The triangle where the center of the tree diameter at breast height is located;
计算单位面积内点数最少的三角形的外接圆,获得外接圆圆心和半径;以外接圆圆心为圆心,以外接圆半径扩大0.03米为新半径,形成外接新圆,计算落入外接新圆的点,然后判断该点集占单株林木胸径点集的比例是否大于80%,如果是,该点集为最优点集;如果否,以中心点为圆心,以外接圆半径为半径,形成中心圆,计算单株林木点集中同时落入中心圆和外接新圆的点,以该点集为新林木点集;Calculate the circumcircle of the triangle with the least number of points per unit area, and obtain the center and radius of the circumcircle; take the center of the circumcircle as the center, expand the radius of the circumcircle by 0.03 meters as the new radius, form a new circumscribed circle, and calculate the points that fall into the new circumscribed circle , and then judge whether the ratio of the point set to the DBH point set of a single tree is greater than 80%, if so, the point set is the optimal point set; , calculate the points that fall into the center circle and the circumscribed new circle at the same time in a single tree point set, and take this point set as the new tree point set;
以外接圆圆心为初始振动中心,以外接圆圆心和中心点的连线为对角线构建矩形区域,以X/Y方向分别移动0.003米,在矩形区域内形成振动中心集合;构建振动中心集合时,扣除距中心点0.01米的点;以振动中心为圆心,以振动中心与中心点的距离为半径构建振动圆,以振动圆半径内外各0.01米构建振动环;Taking the center of the circumscribed circle as the initial vibration center, and taking the connecting line between the center of the circumcircle and the center point as the diagonal line to construct a rectangular area, move 0.003 meters in the X/Y directions respectively to form a set of vibration centers in the rectangular area; construct a set of vibration centers When , deduct the point 0.01 meters away from the center point; take the vibration center as the center, construct the vibration circle with the distance between the vibration center and the center point as the radius, and construct the vibration ring with the radius of the vibration circle 0.01 meters inside and outside;
在振动中心集合内移动振动中心,构建不同的振动环,计算新林木点集中落入各个振动环内的点,当整个振动中心集合循环一遍后,落入点数最多的振动环为最优振动环,该振动环内的点集为最优点集。Move the vibration center in the vibration center set, build different vibration rings, and calculate the points that fall into each vibration ring in the new tree point set. When the whole vibration center set is cycled once, the vibration ring with the most points is the optimal vibration ring , the point set in the vibration ring is the optimal point set.
所述步骤六)的方法为,计算最优点集的中值,求取所有点坐标与中值的差,然后根据该差值,按最小二乘法,计算出该点集的最优拟合圆,从而获得单株林木的位置和胸径。The method of described step 6) is to calculate the median value of the optimal point set, obtain the difference between the coordinates of all points and the median value, and then according to the difference value, according to the least squares method, calculate the optimal fitting circle of the point set. , so as to obtain the position and DBH of a single tree.
所述步骤三)的方法为,加载林木胸径点云文件,采用DBSCAN聚类方法,设定扫描半径为0.4米,最少扫描点数为30点,对整个区域林木数据进行分割,滤除点数少于30点的噪声点,从而分割出每株林木及林木支撑棍的点云数据。The method of the described step 3) is to load the tree diameter point cloud file, adopt the DBSCAN clustering method, set the scanning radius to be 0.4 meters, and the minimum number of scanning points is 30 points, and the forest tree data in the entire area is divided, and the number of filtered points is less than 30 points. 30 points of noise points, so as to segment the point cloud data of each tree and tree support sticks.
综上所述,本发明提出了一种基于DBSCAN聚类和四象限的激光点云林木胸径获取方法,首先采集林木三维激光点云数据,裁切出林木胸径处点云数据,基于DBSCAN聚类,对林木数据进行单株分割,对单株林木数据和林木支撑棍数据进行分隔,获得单株林木胸径点云数据,然后基于四象限法,过滤噪声点,获得林木胸径最优点集,最后,利用最小二乘法,计算林木位置及胸径。To sum up, the present invention proposes a method for obtaining diameter at breast height of forest trees based on DBSCAN clustering and four-quadrant laser point cloud. First, the three-dimensional laser point cloud data of trees is collected, and the point cloud data at breast height of trees is cut out. Based on the DBSCAN clustering , perform single tree segmentation on the tree data, separate the single tree tree data and the tree support stick data, obtain the point cloud data of single tree tree diameter at breast height, and then filter the noise points based on the four-quadrant method to obtain the optimal point set of tree diameter at breast height. Finally, Use the least squares method to calculate the tree position and DBH.
本发明具有的优点和积极效果是:通过将DBSCAN聚类方法应用于林木胸径激光点云数据的分类,和单株林木胸径激光点云数据的获取,可以自动快速分离每株林木胸径点云,有助于提高林木胸径计算效率。通过采用四象限法过滤噪声点,获取单株林木最优胸径激光点云,然后进行计算,计算精确,智能化程度高,使用方便,效率高,可以直接得出林木的位置和胸径数值。The advantages and positive effects of the present invention are: by applying the DBSCAN clustering method to the classification of the DBH laser point cloud data of trees, and the acquisition of the DBH laser point cloud data of individual trees, the DBH point cloud of each tree can be automatically and quickly separated, Helps to improve the calculation efficiency of tree diameter at breast height. By using the four-quadrant method to filter the noise points, the optimal diameter at breast height laser point cloud of a single tree is obtained, and then the calculation is carried out. The calculation is accurate, the degree of intelligence is high, the use is convenient, and the efficiency is high.
附图说明Description of drawings
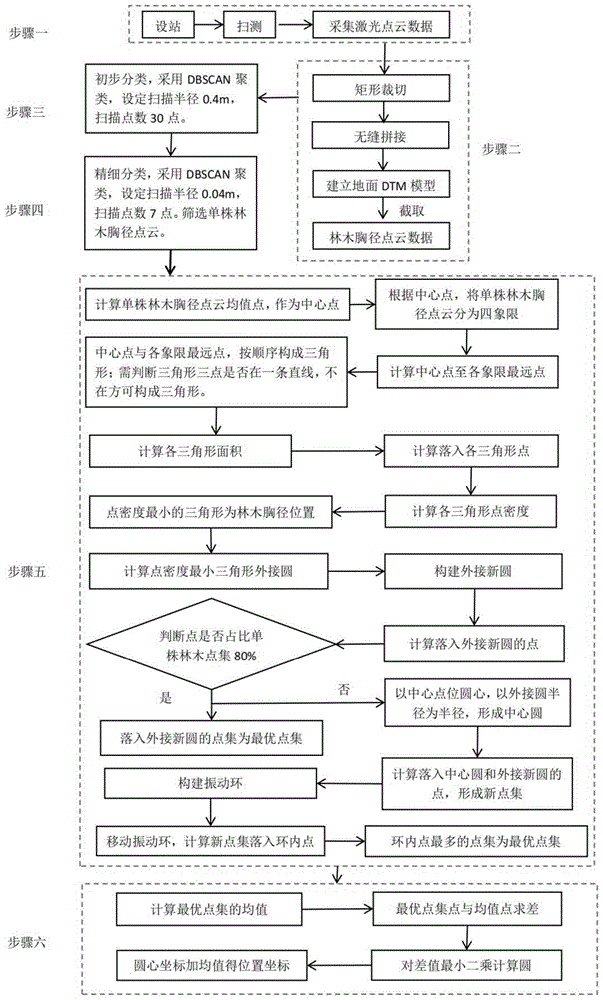
图1为本发明的流程图;Fig. 1 is the flow chart of the present invention;
图2为三维激光扫描仪扫描的林木激光点云数据示意图;Fig. 2 is a schematic diagram of forest tree laser point cloud data scanned by a three-dimensional laser scanner;
图3为截取的林木胸径激光点云示意图;Figure 3 is a schematic diagram of the intercepted tree diameter at breast height laser point cloud;
图4为林木初步分类后不同的单株林木及其支撑棍的点云集合示意图;Figure 4 is a schematic diagram of the point cloud collection of different individual trees and their support rods after the initial classification of forest trees;
图5为精细分类后的单株林木点云集合示意图;Figure 5 is a schematic diagram of the point cloud collection of a single tree tree after fine classification;
图6为四象限法去除噪声点后的胸径点集示意图;Figure 6 is a schematic diagram of the DBH point set after the four-quadrant method has removed noise points;
图7为根据最小二乘法拟合的最优圆示意图。FIG. 7 is a schematic diagram of the optimal circle fitted according to the least squares method.
具体实施方式Detailed ways
为能进一步了解本发明的发明内容、特点及功效,兹例举以下实施例,并配合附图详细说明如下:In order to further understand the content of the invention, features and effects of the present invention, the following embodiments are exemplified and described in detail with the accompanying drawings as follows:
请参阅图1~图7,本发明为解决在CAD中人工判读林木胸径点云效率低的问题,而提供一种基于DBSCAN聚类和四象限的激光点云林木胸径获取方法,包括以下步骤:Please refer to FIGS. 1 to 7. In order to solve the problem of low efficiency in manually interpreting the DBH point cloud of trees in CAD, the present invention provides a DBSCAN clustering and four-quadrant laser point cloud DBH acquisition method, which includes the following steps:
一)采用站式三维激光扫描仪,采集测区林木激光点云数据1) Using a station-type 3D laser scanner to collect laser point cloud data of forest trees in the survey area
采用站式激光扫描仪,采集林木的激光点云,从而获取整个测区林木从地面到树冠的激光点云。The station laser scanner is used to collect the laser point cloud of the forest tree, so as to obtain the laser point cloud of the forest tree from the ground to the canopy in the entire survey area.
使用前,将扫描仪器放置在观测环境中30分钟以上,然后进行连接并通电测试,确认无误后开始作业。扫描作业时,设置测站间的间距为50m,逐次设站扫描获取数据。Before use, place the scanner in the observation environment for more than 30 minutes, then connect and power on the test, and start the operation after confirming that it is correct. During the scanning operation, set the distance between the stations to 50m, and set up the stations one by one to scan to obtain data.
二)对林木激光点云数据进行拼接、裁切、截取,获取林木胸径处指定厚度点云,生成林木胸径点云文件2) Splicing, cutting, and intercepting the tree laser point cloud data, obtaining the point cloud with the specified thickness at the DBH of the tree, and generating the DBH point cloud file
以外业扫描相邻两站点连线的中垂线为界线,与城市绿化林木两侧边界构成的封闭区域为单站点云数据裁切范围,裁切出矩形单站点云数据,然后将各测站经裁切后的点云数据,利用设站点坐标进行拼接,得到整个测区点云数据;根据整个测区地面激光点云数据,建立测区DTM模型,截取林木胸径处指定厚度点云数据,生成林木胸径点云数据文件。The vertical line connecting the two adjacent stations is the boundary line, and the closed area formed by the borders on both sides of the urban greening trees is the single-site cloud data cropping range, and the rectangular single-site cloud data is cut out. The cut point cloud data is spliced with the coordinates of the set site to obtain the point cloud data of the entire survey area; according to the ground laser point cloud data of the entire survey area, the DTM model of the survey area is established, and the point cloud data of the specified thickness at the DBH of the tree is intercepted. Generate a tree DBH point cloud data file.
三)采用DBSCAN聚类方法,对不同林木的胸径点云进行分组,获取单株林木胸径处及其支撑棍的点云集合3) Using the DBSCAN clustering method, the DBH point clouds of different trees are grouped, and the point cloud collection of the DBH of a single tree and its supporting rods is obtained.
加载林木胸径点云文件,采用DBSCAN聚类方法,设定扫描半径为0.4米,最少扫描点数为30点,对整个区域林木数据进行分割,滤除点数少于30点的噪声点,从而分割出每株林木及林木支撑棍的点云数据。Load the tree diameter at breast height point cloud file, use the DBSCAN clustering method, set the scanning radius to 0.4 meters, and set the minimum number of scanning points to 30 points. Point cloud data for each tree and tree support.
四)采用DBSCAN聚类方法分类,剔除单株林木周边支撑棍的噪声点,获得单株林木胸径处的点云集合4) The DBSCAN clustering method is used for classification, and the noise points of the support sticks around a single tree are removed to obtain the point cloud set at the DBH of a single tree.
对单株林木及林木支撑棍的点云集合,根据DBSCAN聚类方法,设定扫描半径为0.04米,最少扫描点数为7点,对单株林木与林木周边支撑棍点云数据进行分类,获得单株林木胸径处的点云集合。For the point cloud collection of a single tree and tree support rods, according to the DBSCAN clustering method, set the scanning radius to 0.04 meters and the minimum number of scanning points to 7 points. A collection of point clouds at DBH of a single tree.
单株林木及其支撑棍的点云具有以下特点,单株林木胸径的点云一般居中,单株林木胸径的点云较为密集,点数较多;支撑棍的点云居于边缘,点数较少,支撑棍一般为三个,对称分布;The point cloud of a single tree and its support rod has the following characteristics. The point cloud of the DBH of a single tree is generally in the middle, the point cloud of the DBH of a single tree is denser and has more points; the point cloud of the support rod is at the edge and has fewer points. , the support rods are generally three, symmetrically distributed;
根据单株林木及其支撑棍的点云特点,当点云分为一类时,则该点集为单株林木点集;当点集分为两类时,则点集点数较多的为单株林木点集;当点集分为三类时,首先判断是否有一类点集的点数是其他两类点集的5倍以上,如果是,则该点集为单株林木点集;如果否,计算三个分类点集中心点,形成三角形,角度最大的点集即为单株林木点集;当点集数量为四个以上时,计算各个类别点集的中心点和所有类别点集的中心点,接近所有类别点集中心点的点集为单株林木点集。According to the point cloud characteristics of a single tree and its supporting rods, when the point cloud is divided into one category, the point set is a single tree point set; when the point set is divided into two categories, the point set with more points is Single tree point set; when the point set is divided into three categories, first determine whether there is one type of point set with more than 5 times the number of points of the other two types of point sets, if so, the point set is a single tree tree point set; if No, calculate the center point of three classification point sets to form a triangle, the point set with the largest angle is the single tree point set; when the number of point sets is more than four, calculate the center point of each category point set and all category point sets The center point of , and the point set close to the center point of all category point sets is the single tree point set.
五)过滤噪声点,获取单株林木胸径最优点云集合5) Filter the noise points to obtain the optimal point cloud set for the DBH of a single tree
对单株林木点云集合求取均值,获取单株林木点云集合均值点,以均值点为中心点,将单株林木点云数据划分至四个象限;计算各象限中与中心点距离最远的点,将各象限离中心点最远的点与中心点按顺序构建三角形;计算各三角形单位面积内的点数,确定单位面积内点数最少的三角形为单株林木胸径圆心所在的三角形;Take the mean value of the point cloud set of a single tree tree to obtain the mean point of the point cloud set of a single tree tree, take the mean point as the center point, and divide the point cloud data of a single tree tree into four quadrants; calculate the distance between each quadrant and the center point. For the farthest point, construct a triangle with the points farthest from the center point in each quadrant and the center point in sequence; calculate the number of points per unit area of each triangle, and determine the triangle with the least number of points per unit area as the triangle with the center of the diameter at breast height of a single tree;
计算单位面积内点数最少的三角形的外接圆,获得外接圆圆心和半径;以外接圆圆心为圆心,以外接圆半径扩大0.03米为新半径,形成外接新圆,计算落入外接新圆的点,然后判断该点集占单株林木胸径点集的比例是否大于80%,如果是,该点集为最优点集;如果否,以中心点为圆心,以外接圆半径为半径,形成中心圆,计算单株林木点集中同时落入中心圆和外接新圆的点,以该点集为新林木点集;Calculate the circumcircle of the triangle with the least number of points per unit area, and obtain the center and radius of the circumcircle; take the center of the circumcircle as the center, expand the radius of the circumcircle by 0.03 meters as the new radius, form a new circumscribed circle, and calculate the points that fall into the new circumscribed circle , and then judge whether the ratio of the point set to the DBH point set of a single tree is greater than 80%, if so, the point set is the optimal point set; , calculate the points that fall into the center circle and the circumscribed new circle at the same time in a single tree point set, and take this point set as the new tree point set;
以外接圆圆心为初始振动中心,以外接圆圆心和中心点的连线为对角线构建矩形区域,以X/Y方向分别移动0.003米,在矩形区域内形成振动中心集合;构建振动中心集合时,扣除距中心点0.01米的点;以振动中心为圆心,以振动中心与中心点的距离为半径构建振动圆,以振动圆半径内外各0.01米构建振动环;Taking the center of the circumscribed circle as the initial vibration center, and taking the connecting line between the center of the circumcircle and the center point as the diagonal line to construct a rectangular area, move 0.003 meters in the X/Y directions respectively to form a set of vibration centers in the rectangular area; construct a set of vibration centers When , deduct the point 0.01 meters away from the center point; take the vibration center as the center, construct the vibration circle with the distance between the vibration center and the center point as the radius, and construct the vibration ring with the radius of the vibration circle 0.01 meters inside and outside;
在振动中心集合内移动振动中心,构建不同的振动环,计算新林木点集中落入各个振动环内的点,当整个振动中心集合循环一遍后,落入点数最多的振动环为最优振动环,该振动环内的点集为最优点集。Move the vibration center in the vibration center set, build different vibration rings, and calculate the points that fall into each vibration ring in the new tree point set. When the whole vibration center set is cycled once, the vibration ring with the most points is the optimal vibration ring , the point set in the vibration ring is the optimal point set.
采用四象限法,筛选出单株林木圆心所在位置,然后运用占比法、交集法和移动圆心法,过滤噪声点,获得单株林木胸径处的最优点集。The four-quadrant method was used to screen out the position of the center of a single tree, and then the proportion method, intersection method and moving center method were used to filter noise points to obtain the optimal point set at DBH of a single tree.
六)以最优点集为点集,以圆方程为基础方程,采用最小二乘计算法,计算该点集的最优圆,该最优圆半径即为林木直径,该最优圆中心即为林木中心。6) Taking the optimal point set as the point set and the circle equation as the basic equation, the least squares calculation method is used to calculate the optimal circle of the point set, the radius of the optimal circle is the diameter of the tree, and the center of the optimal circle is Forest Center.
为防止计算过程中出现奇异矩阵,计算最优点集的均值,求取所有点坐标与中值的差,然后根据该差值,按最小二乘法,计算出该点集的最优拟合圆,从而获得单株林木的位置和胸径。In order to prevent singular matrices from appearing in the calculation process, calculate the mean value of the optimal point set, find the difference between the coordinates of all points and the median value, and then calculate the optimal fitting circle of the point set according to the difference according to the least square method, Thus, the position and DBH of individual trees were obtained.
城市绿化林木调查具有数量多,密度大,通视条件差,调查精度高等特点。站式三维激光扫描仪具有扫描精度高,扫描距离远的特点。采用站式三维激光扫描仪,可以快速获取林木激光点云数据。The survey of urban greening trees has the characteristics of large number, high density, poor visibility and high survey accuracy. The stand-type 3D laser scanner has the characteristics of high scanning accuracy and long scanning distance. The station-type 3D laser scanner can quickly obtain forest tree laser point cloud data.
根据扫描后的激光点云数据,进行相应的裁切、拼接和截取,获取需要的林木激光点云数据。According to the scanned laser point cloud data, the corresponding cutting, splicing and interception are performed to obtain the required forest tree laser point cloud data.
初步分类,这一步骤依赖于计算机程序处理。对林木胸径激光点云数据,根据DBSCAN聚类方法,设定扫描半径为0.4米,最少扫描点数为30点,将数据分割,分割出单株林木及林木支撑棍的点云集合。Preliminary classification, this step relies on computer program processing. For the laser point cloud data of tree diameter at breast height, according to the DBSCAN clustering method, the scanning radius is set to 0.4 meters, and the minimum number of scanning points is 30 points.
精细分类,这一步骤依赖于计算机程序处理。对分割出的单株林木及林木支撑棍的点云集合,基于DBSCAN聚类方法,设定扫描半径为0.04米,最少扫描点数为7点,对单株林木与林木周边支撑棍数据分割;并根据单株林木和支撑棍点云特点,筛选出单株林木胸径点云数据。For fine-grained classification, this step relies on computer program processing. For the point cloud set of the segmented single tree and tree support rods, based on the DBSCAN clustering method, the scanning radius is set to 0.04 meters, and the minimum number of scanning points is 7 points, and the data of the single tree tree and the surrounding support rods are segmented; and According to the point cloud characteristics of individual trees and support rods, the DBH point cloud data of individual trees were screened out.
对精细分类后的胸径点云,提出了四象限法过滤掉噪声点,确定最优点集。计算均值作为中心点;根据中心点,将点云分为四象限;然后根据中心点距四象限最远点,按顺序构建三角形,确定点密度最小的三角形为林木中心所在位置,然后按照一定的半径构成外接新圆,然后运用占比判断、交集计算、移动圆心滤除噪声点,获得最优点集。For the finely classified DBH point cloud, a four-quadrant method is proposed to filter out the noise points and determine the optimal point set. Calculate the mean as the center point; divide the point cloud into four quadrants according to the center point; then construct triangles in order according to the farthest point from the center point to the four quadrants, determine the triangle with the smallest point density as the location of the tree center, and then follow a certain The radius forms a new circumscribed circle, and then uses proportion judgment, intersection calculation, and moving the center of the circle to filter out noise points to obtain the optimal point set.
对获得的最优点集,计算均值,对最优点集与均值求差,然后采用最小二乘法求取圆心和直径,圆心坐标与均值相加即得林木位置,直径即为林木胸径。For the obtained optimal point set, calculate the mean value, calculate the difference between the optimal point set and the mean value, and then use the least squares method to obtain the center and diameter of the circle.
结合数值的实施例:Examples incorporating numerical values:
以天津市某道路绿化区域为例,区域位于天津市滨海新区,区域成带状,区域内林木众多、分布密集。其中西侧为乔木,东侧为灌木,本次仅对乔木进行数据采集。乔木间距约为2.5m×2.5m,苗木树龄约为3a。Take a road greening area in Tianjin as an example. The area is located in Tianjin Binhai New Area. Among them, there are trees on the west side and shrubs on the east side. Only trees are collected this time. The arbor spacing is about 2.5m×2.5m, and the age of the seedlings is about 3a.
步骤1,采用Maptek I-Site 8820型三维激光扫描仪进行扫描测量,采用TrimbleR8GPS双频接收机采集数据。将扫描仪器放置在观测环境中30分钟以上,然后进行连接并通电测试,确认无误后开始作业。描作业步骤如下:Step 1, use Maptek I-Site 8820 3D laser scanner to scan and measure, and use Trimble R8GPS dual-frequency receiver to collect data. Place the scanner in the observation environment for more than 30 minutes, then connect and power on the test, and start the operation after confirming that it is correct. The steps of the scanning operation are as follows:
用GPS-RTK获取扫描设站点及后视点的三维坐标信息。将三维激光扫描仪架设在设计站位,对仪器进行整平,然后找准三维激光扫描仪的后视点,并将扫描设站点及后视点坐标信息输入三维激光扫描仪控制手簿中,扫描区域角度设置为360°,扫描质量设置为中档,开始扫描测量。Use GPS-RTK to obtain the three-dimensional coordinate information of the scanning site and the backsight point. Set up the 3D laser scanner at the design station, level the instrument, then locate the backsight point of the 3D laser scanner, and enter the scanning site and the coordinate information of the backsight point into the 3D laser scanner control handbook, and scan the area. The angle is set to 360°, the scan quality is set to medium, and the scan measurement is started.
扫描完成后,检查数据完整性,如有缺失则补充扫描,如没有则换站,直至完成整个测区扫描作业。扫描后测区的林木点云效果如图2所示。After the scan is completed, check the data integrity, supplement the scan if it is missing, and switch stations if not, until the scan of the entire survey area is completed. The tree point cloud effect in the survey area after scanning is shown in Figure 2.
步骤2,以外业扫描相邻两站点连线的中垂线为界线,与城市绿化林木两侧边界构成的封闭区域为单站点云数据裁切宽度,裁切长度设置为50米,裁切出矩形单站点云数据,然后将各测站经裁切后的点云数据,利用设站点坐标进行拼接,得到整个区域点云数据;根据测区地面激光点云数据,建立测区DTM模型,截取距地面13米处0.04米厚度点云数据,生成林木胸径点云数据文件。如图3所示,为了清晰美观,示意图只展示4棵林木的点云数据Step 2: The vertical line connecting the two adjacent sites is the boundary line, and the closed area formed by the borders on both sides of the urban greening trees is the single-site cloud data cutting width, and the cutting length is set to 50 meters. Rectangular single-site cloud data, and then splicing the cut point cloud data of each station using the site coordinates to obtain the point cloud data of the entire area; The point cloud data of the thickness of 0.04 meters at a distance of 13 meters from the ground is used to generate the point cloud data file of tree diameter at breast height. As shown in Figure 3, for the sake of clarity and beauty, the schematic diagram only shows the point cloud data of 4 trees.
步骤3,初步分类,采用DBSCAN聚类算法,根据林木之间的距离大于0.4米,设定分类半径为0.4米,最少点数为30点,对整个区域林木数据进行分割,滤除点数少于30点的噪声点,从而分割出每株林木及林木支撑棍的点云数据。如图4所示,展示了初步分类后的4颗林木数据。Step 3: Preliminary classification, using DBSCAN clustering algorithm, according to the distance between trees is greater than 0.4 meters, set the classification radius to 0.4 meters, the minimum number of points is 30 points, segment the forest tree data in the entire area, and filter out the number of points less than 30 points. The noise points of the points are divided into the point cloud data of each tree and tree support rods. As shown in Figure 4, the data of 4 forest trees after preliminary classification are shown.
DBSCAN(Density-Based Spatial Clustering of Applications with Noise)是一个基于密度的聚类算法。与划分和层次聚类方法不同,它将簇定义为密度相连的点的最大集合,能够把具有足够高密度的区域划分为簇,并可在噪声的空间数据库中发现任意形状的聚类。DBSCAN (Density-Based Spatial Clustering of Applications with Noise) is a density-based clustering algorithm. Unlike partitioning and hierarchical clustering methods, it defines a cluster as the largest set of densely connected points, can divide regions with high enough density into clusters, and can find clusters of arbitrary shapes in noisy spatial databases.
步骤4,精细分类,设定扫描半径为0.04米,最少扫描点数为7点,对单株林木与林木周边支撑棍数据分类;筛选出每株林木的点云数据。如图5所示,过滤掉了支撑棍的点云数据,获得了单株林木点云数据。Step 4, fine classification, set the scanning radius to 0.04 meters, and the minimum number of scanning points to 7 points, classify the data of a single tree and the surrounding support sticks of the tree; filter out the point cloud data of each tree. As shown in Figure 5, the point cloud data of the support rods were filtered out, and the point cloud data of a single tree was obtained.
单株林木和支撑棍的点云具有以下特点,单株林木胸径的点云一般居中,单株林木胸径的点云较为密集,数量较多,支撑棍的点云居于边缘,数量较少,支撑棍一般为三个或四个,对称分布;根据单株林木和支撑棍的点云特点,当点云分为一类时,则该点集为单株林木点集;当点集分为两类时,则点集数目较多的为单株林木点集;当点集分为三类时,首先判断是否有一类点集数量在其他两类的5倍以上,是的话则该点集为单株林木点集;否则,计算三个分类点集中心点,形成三角形,角度最大的点集即为单株林木点集;当点集数量四个以上时,计算各个类别点集的中心点和所有类别点集的中心点,接近所有点集中心点的点集为单株林木点集。The point cloud of a single tree and support rod has the following characteristics. The point cloud of the DBH of a single tree is generally in the middle, the point cloud of the DBH of a single tree is denser and more numerous, and the point cloud of the support rod is located at the edge and has a small number. There are generally three or four supporting rods, symmetrically distributed; according to the point cloud characteristics of a single tree and supporting rods, when the point cloud is divided into one category, the point set is a single tree point set; when the point set is divided into In the case of two types, the number of point sets is the single tree point set; when the point set is divided into three types, first determine whether there is one type of point set more than 5 times the number of the other two types, if yes, then the point set is a single tree point set; otherwise, calculate the center points of three classification point sets to form a triangle, and the point set with the largest angle is the single tree tree point set; when the number of point sets is more than four, calculate the center of each category point set point and the center point of all category point sets, and the point set close to the center point of all point sets is a single tree tree point set.
计算三角形钝角时,需要用到两点间距离公式和余弦定理。When calculating the obtuse angle of a triangle, you need to use the formula for the distance between two points and the law of cosines.
两点间距离公式如下:The formula for the distance between two points is as follows:

余弦定理:Cosine Theorem:
步骤5,对步骤4获得的单株林木点集,求平均值作为中心点(X0,Y0),根据点集中各个点的X/Y坐标与中心点(X0,Y0)的距离大小关系,将点集分为四象限点集。Step 5: Calculate the average value of the single tree point set obtained in step 4 as the center point (X 0 , Y 0 ), and according to the distance between the X/Y coordinates of each point in the point set and the center point (X 0 , Y 0 ) The size relationship divides the point set into four quadrant point sets.
求取各个象限中距中心点(X0,Y0)最远的点,将中心点与各象限距其最远的点按顺序构建三角形。例如中心点与第一象限最远点、第二象限最远点构建三角形,中心点与第二象限最远点、第三象限最远点构建三角形等等。如果某一象限无点,则跳过该象限,例如第二象限无点,则跳过该象限,中心点与第一象限、第三象限最远点构建三角形。Find the point farthest from the center point (X 0 , Y 0 ) in each quadrant, and construct a triangle by ordering the center point and the farthest point in each quadrant. For example, the center point and the farthest point in the first quadrant and the farthest point in the second quadrant construct a triangle, and the center point and the farthest point in the second quadrant and the farthest point in the third quadrant construct a triangle, and so on. If there is no point in a quadrant, skip this quadrant. For example, if there is no point in the second quadrant, skip this quadrant, and the center point and the farthest point in the first quadrant and the third quadrant construct a triangle.
根据斜率法,判断三点是否共线,当x2=x1、x3=x1,或
根据海伦公式,计算各个三角形的面积。海伦公式如下:假定三角形边长分别为a、b、c,三角形的面积S可由以下公式求得:Calculate the area of each triangle according to Heron's formula. Heron's formula is as follows: Assuming that the side lengths of the triangle are a, b, and c, respectively, the area S of the triangle can be obtained by the following formula:

根据点与三角形的位置关系,计算单株林木点集落入各个三角形的点的数量。According to the positional relationship between the point and the triangle, the number of points that fall into each triangle is calculated.
判断点与三角形位置关系的方法如下:假设三角形的三个点按照顺时针(或者逆时针)顺序是A,B,C。对于某一点P,求出三个向量PA、PB、PC,然后计算以下三个叉乘(^表示叉乘符号):t1=PA^PB、t2=PB^PC、t3=PC^PA,如果t1,t2,t3同号(同正或同负),那么P在三角形内部,否则在外部。The method for judging the positional relationship between a point and a triangle is as follows: Assume that the three points of the triangle are A, B, and C in a clockwise (or counterclockwise) order. For a certain point P, find three vectors PA, PB, PC, and then calculate the following three cross products (^ represents the symbol of cross product): t1=PA^PB, t2=PB^PC, t3=PC^PA, if t1, t2, t3 have the same sign (the same positive or the same negative), then P is inside the triangle, otherwise it is outside.
根据各个三角形的面积和落入三角形内的点的数量,计算每个三角形的点密度,点密度最小的三角形为单株林木胸径圆心坐落位置。According to the area of each triangle and the number of points falling into the triangle, the point density of each triangle is calculated.
根据外接圆公式,计算点密度最小的三角形的外接圆。According to the circumcircle formula, calculate the circumcircle of the triangle with the smallest point density.
计算外接圆公式如下:设三角形三个顶点为A(X0,Y0)、B(X1,Y1)、C(X2,Y2),The formula for calculating the circumcircle is as follows: Let the three vertices of the triangle be A(X0,Y0), B(X1,Y1), C(X2,Y2),
令a1=X1-X0,b1=Y1-Y0,c1=(a1*a1+b1*b1)/2,Let a1=X1-X0, b1=Y1-Y0, c1=(a1*a1+b1*b1)/2,
a2=X2-X0,b2=Y2-Y0,c2=(a2*a2+b2*b2)/2,a2=X2-X0, b2=Y2-Y0, c2=(a2*a2+b2*b2)/2,
d=a1*b2-a2*b1d=a1*b2-a2*b1
则:圆心(XC,YC)坐标为XC=x0+(c1*b2-c2*b1)/dThen: the coordinates of the center of the circle (XC, YC) are XC=x0+(c1*b2-c2*b1)/d
YC=y0+(a1*c2-a2*c1)/dYC=y0+(a1*c2-a2*c1)/d

以外接圆圆心(XC,YC)为圆心,以外接圆半径r扩大0.03米为新的半径,构建同心圆。Taking the center of the circumcircle (X C , Y C ) as the center, and expanding the radius r of the circumcircle by 0.03 meters as a new radius, construct concentric circles.
根据点与圆心的距离,计算单株林木点集中落入同心圆的点,判断外接新圆内的点的数量占单株林木点集数量的比例,如果占比超过80%,则外接新圆内的点为最优点集。According to the distance between the point and the center of the circle, calculate the points where the points of a single tree fall into the concentric circles, and determine the proportion of the points in the circumscribed new circle to the number of points in a single tree. If the proportion exceeds 80%, then the circumscribed new circle The points inside are the optimal point set.
如占比小于80%,则以中心点(X0,Y0)为圆心,以外接圆半径r为半径,构建中心圆,计算单株林木点集中同时落入中心圆和外接新圆的点,以该点集为新林木点集。If the proportion is less than 80%, take the center point (X 0 , Y 0 ) as the center of the circle and the radius of the circumscribed circle r as the radius to construct the central circle, and calculate the points that fall into the central circle and the circumscribed new circle at the same time for the points of a single tree. , take this point set as the new tree point set.
以外接圆圆心(XC,YC)为初始振动中心,以外接圆圆心(XC,YC)和中心点(X0,Y0)的连线为对角线构建矩形区域,以X/Y方向分别移动0.003米,在矩形区域内形成振动中心集合;构建振动中心集合时,扣除距中心点(X0,Y0)0.01米的点。Taking the center of the circumcircle (X C , Y C ) as the initial vibration center, and taking the connecting line between the center of the circumcircle (X C , Y C ) and the center point (X 0 , Y 0 ) as the diagonal line, a rectangular area is constructed, and a rectangular area is constructed with X Move 0.003 meters in the /Y direction respectively to form a vibration center set in a rectangular area; when constructing a vibration center set, deduct points 0.01 meters away from the center point (X 0 , Y 0 ).
以振动中心为圆心,以振动中心与中心点(X0,Y0)的距离为半径构建振动圆,以振动圆半径内外各0.01米构建振动环。Taking the vibration center as the center, the vibration circle is constructed with the distance between the vibration center and the center point (X 0 , Y 0 ) as the radius, and the vibration ring is constructed with 0.01 meters inside and outside the radius of the vibration circle.
在振动中心集合内移动振动中心,构建不同的振动环,计算新林木点集中落入各个振动环内的点。当整个振动中心集合循环一遍后,落入点数最多的振动环为最优振动环,该振动环内的点集为最优点集。Move the vibration center in the vibration center set, build different vibration rings, and calculate the points that fall into each vibration ring in the new tree point set. When the entire vibration center set is cycled once, the vibration ring with the most points is the optimal vibration ring, and the point set in the vibration ring is the optimal point set.
步骤6,根据步骤5计算的单株林木的最优点集,计算最优点集的均值,将最优点集中点与均值求差,然后根据最小二乘法计算最优圆,圆心坐标与均值相加即得林木位置,直径即为林木胸径。如图7所示。Step 6, according to the optimal point set of a single tree calculated in step 5, calculate the mean value of the optimal point set, calculate the difference between the optimal point concentration point and the mean value, and then calculate the optimal circle according to the least square method, and add the coordinates of the center of the circle to the mean value. The position of the tree is obtained, and the diameter is the tree diameter at breast height. As shown in Figure 7.
最小二乘法原理如下。假定圆心坐标为(x0,y0),半径为R,在圆上分布了n个二维坐标点,且坐标点位(xi,yi),i=1,2,...,n;The principle of least squares is as follows. Assuming that the coordinates of the center of the circle are (x 0 , y 0 ), the radius is R, n two-dimensional coordinate points are distributed on the circle, and the coordinate points are (x i , y i ), i=1,2,..., n;
圆曲线的基础方程为:The basic equation of a circular curve is:
R2=(x-x0)2+(y-y0)2 (1)R 2 =(xx 0 ) 2 +(yy 0 ) 2 (1)
展开可得:Expand to get:

令make

即which is

则(2)式变换后的为Then (2) is transformed into
x2+y2-ax-by+c=0 (5)x 2 +y 2 -ax-by+c=0 (5)
该公式推广到n个点后,写成矩阵形式可得:After the formula is extended to n points, it can be written in matrix form:

令:make:

则but
AX=L (8)AX=L (8)
根据最小二乘算法可得:According to the least squares algorithm, we can get:
X=(ATA)-1ATL (9)X=(A T A) -1 A T L (9)
根据公式(9),可求得a,b,c,代入到公式(4)中,即可求得圆心坐标和半径。According to formula (9), a, b, c can be obtained, and they can be substituted into formula (4) to obtain the coordinates of the center of the circle and the radius.
综上所述,本发明涉及一种基于DBSCAN聚类和四象限的激光点云林木胸径获取方法,采用三维激光扫描仪对城市绿化林木进行扫描,然后进行截取,获得林木胸径激光点云数据,提出了一种改进的林木胸径的快速获取方法,尤其涉及DBSCAN聚类和四象限过滤噪声点,经过初步分类、精细分类、四象限过滤噪声点、以及最小二乘的计算,具体包括以下步骤:1)采用站式三维激光扫描仪,采集林木激光点云数据;2)对林木激光点云数据进行拼接、裁切、截取,获取林木胸径处指定厚度点云,生成林木胸径点云文件;3)基于DBSCAN聚类方法,对不同林木的胸径点云进行分组,获取单株林木胸径处及林木支撑棍的点云集合。4)基于DBSCAN聚类方法,剔除单株林木周边支撑棍的噪声点,获得单株林木的点云集合;5)基于四象限法,过滤噪声点,获取单株林木胸径最优点云集合;6)采用最小二乘计算法,计算林木胸径。To sum up, the present invention relates to a method for obtaining the diameter of trees in a laser point cloud based on DBSCAN clustering and four quadrants. A three-dimensional laser scanner is used to scan the urban greening trees, and then intercepted to obtain the laser point cloud data of the diameter at breast height of the trees. An improved rapid acquisition method of tree diameter at breast height is proposed, especially involving DBSCAN clustering and four-quadrant filtering noise points. After preliminary classification, fine classification, four-quadrant filtering noise points, and least squares calculation, it includes the following steps: 1) Using a standing 3D laser scanner to collect the laser point cloud data of trees; 2) Splicing, cutting and intercepting the laser point cloud data of trees, obtaining the point cloud of the specified thickness at the DBH of the tree, and generating the DBH point cloud file; 3 ) based on the DBSCAN clustering method, grouped the DBH point clouds of different trees, and obtained the point cloud set of DBH of a single tree and tree support rods. 4) Based on the DBSCAN clustering method, the noise points of the support rods around the single tree are removed, and the point cloud set of the single tree is obtained; 5) Based on the four-quadrant method, the noise points are filtered to obtain the optimal point cloud set of the single tree diameter at breast height; 6 ) using the least squares method to calculate the tree diameter at breast height.
尽管上面结合附图对本发明的优选实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,并不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围的情况下,还可以做出很多形式,这些均属于本发明的保护范围之内。Although the preferred embodiments of the present invention have been described above with reference to the accompanying drawings, the present invention is not limited to the above-mentioned specific embodiments. Under the inspiration of the present invention, personnel can also make many forms without departing from the scope of the present invention and the protection scope of the claims, which all belong to the protection scope of the present invention.
Claims (5)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210137082.9A CN114511546A (en) | 2022-02-15 | 2022-02-15 | A method for obtaining diameter at breast height of trees from laser point cloud based on DBSCAN clustering and four quadrants |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210137082.9A CN114511546A (en) | 2022-02-15 | 2022-02-15 | A method for obtaining diameter at breast height of trees from laser point cloud based on DBSCAN clustering and four quadrants |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN114511546A true CN114511546A (en) | 2022-05-17 |
Family
ID=81551460
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210137082.9A Withdrawn CN114511546A (en) | 2022-02-15 | 2022-02-15 | A method for obtaining diameter at breast height of trees from laser point cloud based on DBSCAN clustering and four quadrants |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN114511546A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115937304A (en) * | 2023-03-13 | 2023-04-07 | 季华实验室 | A method and device for accurately estimating standing tree position and diameter at breast height through sparse point cloud |
| CN115953607A (en) * | 2023-01-04 | 2023-04-11 | 北京数字绿土科技股份有限公司 | Trunk diameter at breast height extraction method and system using point cloud data |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111709986A (en) * | 2020-05-18 | 2020-09-25 | 中国能源建设集团江苏省电力设计院有限公司 | Power transmission line forest tree statistical method based on laser point cloud |
| CN112070769A (en) * | 2020-09-18 | 2020-12-11 | 福州大学 | Layered point cloud segmentation method based on DBSCAN |
| CN112462347A (en) * | 2020-12-28 | 2021-03-09 | 长沙理工大学 | Laser radar point cloud rapid classification filtering algorithm based on density clustering |
| CN113269825A (en) * | 2021-04-06 | 2021-08-17 | 云南师范大学 | Forest breast diameter value extraction method based on foundation laser radar technology |
| CN113449733A (en) * | 2021-03-24 | 2021-09-28 | 西安理工大学 | Point cloud scene tree extraction method based on structural analysis |
| WO2021232467A1 (en) * | 2020-05-19 | 2021-11-25 | 北京数字绿土科技有限公司 | Point cloud single-tree segmentation method and apparatus, device and computer-readable medium |
-
2022
- 2022-02-15 CN CN202210137082.9A patent/CN114511546A/en not_active Withdrawn
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111709986A (en) * | 2020-05-18 | 2020-09-25 | 中国能源建设集团江苏省电力设计院有限公司 | Power transmission line forest tree statistical method based on laser point cloud |
| WO2021232467A1 (en) * | 2020-05-19 | 2021-11-25 | 北京数字绿土科技有限公司 | Point cloud single-tree segmentation method and apparatus, device and computer-readable medium |
| CN112070769A (en) * | 2020-09-18 | 2020-12-11 | 福州大学 | Layered point cloud segmentation method based on DBSCAN |
| CN112462347A (en) * | 2020-12-28 | 2021-03-09 | 长沙理工大学 | Laser radar point cloud rapid classification filtering algorithm based on density clustering |
| CN113449733A (en) * | 2021-03-24 | 2021-09-28 | 西安理工大学 | Point cloud scene tree extraction method based on structural analysis |
| CN113269825A (en) * | 2021-04-06 | 2021-08-17 | 云南师范大学 | Forest breast diameter value extraction method based on foundation laser radar technology |
Non-Patent Citations (1)
| Title |
|---|
| 周珺婕: "基于地面三维激光扫描数据的林木参数提取方法研究", 《博士论文电子数据库》, 15 April 2020 (2020-04-15) * |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115953607A (en) * | 2023-01-04 | 2023-04-11 | 北京数字绿土科技股份有限公司 | Trunk diameter at breast height extraction method and system using point cloud data |
| CN115953607B (en) * | 2023-01-04 | 2024-02-13 | 北京数字绿土科技股份有限公司 | Trunk breast diameter extraction method and system using point cloud data |
| CN115937304A (en) * | 2023-03-13 | 2023-04-07 | 季华实验室 | A method and device for accurately estimating standing tree position and diameter at breast height through sparse point cloud |
| CN115937304B (en) * | 2023-03-13 | 2023-06-16 | 季华实验室 | Method and device for accurately estimating stump position and breast diameter through sparse point cloud |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110111414B (en) | Orthographic image generation method based on three-dimensional laser point cloud | |
| CN112070769B (en) | A DBSCAN-based Hierarchical Point Cloud Segmentation Method | |
| CN116310192A (en) | Urban building three-dimensional model monomer reconstruction method based on point cloud | |
| CN112132840B (en) | A vehicle-mounted street tree point cloud classification and feature information extraction method | |
| CN114764871B (en) | Urban building attribute extraction method based on airborne laser point cloud | |
| CN103017739B (en) | Manufacturing method of true digital ortho map (TDOM) based on light detection and ranging (LiDAR) point cloud and aerial image | |
| CN112595258A (en) | Ground object contour extraction method based on ground laser point cloud | |
| CN106127857B (en) | The on-board LiDAR data modeling method of integrated data driving and model-driven | |
| CN106918311A (en) | Isolated tree crown mapping area automatic calculating method based on vehicle-mounted laser cloud data | |
| CN116051533B (en) | Construction quality detection method and device for electric power pole tower | |
| CN115984721B (en) | A Method for Rural Landscape Management Based on Oblique Photogrammetry and Image Recognition Technology | |
| CN110726998B (en) | A method of laser radar scanning to determine coal mining subsidence basins in mining areas | |
| CN116412759A (en) | A Method for Forestry Investigation Using 3D Laser Scanner | |
| CN116934678B (en) | Aircraft skin pit defect detection method at different scales based on point cloud data | |
| CN114898118A (en) | Automatic statistical method and system for power transmission line house removal amount based on multi-source point cloud | |
| CN114511546A (en) | A method for obtaining diameter at breast height of trees from laser point cloud based on DBSCAN clustering and four quadrants | |
| Zhao et al. | A 3D modeling method for buildings based on LiDAR point cloud and DLG | |
| CN104729529B (en) | The method and system that map surveying systematic error judges | |
| CN117036393B (en) | Building contour extraction method based on inclined live-action three-dimensional model | |
| CN118887366A (en) | A refined modeling method for underground structures based on laser radar scanning | |
| CN119984195A (en) | Forest plot survey and measurement method and system based on fusion of multiple point cloud technologies | |
| CN118066997A (en) | A method for measuring stockpile volume based on SLAM | |
| CN111444824A (en) | A survey method of vegetation spatial distribution pattern and vegetation classification method based on UAV technology | |
| CN115761382A (en) | ALS point cloud classification method based on random forest | |
| CN117332307B (en) | Functional area classification method, system, medium and equipment based on multi-source data fusion |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| WW01 | Invention patent application withdrawn after publication | ||
| WW01 | Invention patent application withdrawn after publication |
Application publication date: 20220517 |