CN114117261B - 轨迹检测方法、装置、电子设备及存储介质 - Google Patents
轨迹检测方法、装置、电子设备及存储介质 Download PDFInfo
- Publication number
- CN114117261B CN114117261B CN202210111008.XA CN202210111008A CN114117261B CN 114117261 B CN114117261 B CN 114117261B CN 202210111008 A CN202210111008 A CN 202210111008A CN 114117261 B CN114117261 B CN 114117261B
- Authority
- CN
- China
- Prior art keywords
- track
- road
- determining
- road section
- tracks
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/90—Details of database functions independent of the retrieved data types
- G06F16/95—Retrieval from the web
- G06F16/953—Querying, e.g. by the use of web search engines
- G06F16/9537—Spatial or temporal dependent retrieval, e.g. spatiotemporal queries
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/22—Matching criteria, e.g. proximity measures
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Data Mining & Analysis (AREA)
- Databases & Information Systems (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Evolutionary Computation (AREA)
- Evolutionary Biology (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Bioinformatics & Computational Biology (AREA)
- Artificial Intelligence (AREA)
- Life Sciences & Earth Sciences (AREA)
- Traffic Control Systems (AREA)
- Navigation (AREA)
Abstract
本申请实施例提供一种轨迹检测方法、装置、电子设备及存储介质,可以应用于地图等领域,该方法包括:基于预设时间段内所上报的M个轨迹点,构造N条轨迹;确定N条轨迹中每条轨迹所匹配的路段;根据每条轨迹所匹配的路段的属性信息和路段对应的轨迹点的运动信息中的至少一个,确定每条轨迹的关键路段;根据N条轨迹中每条轨迹的关键路段,确定N条轨迹中的异常轨迹。即本申请通过确定轨迹的关键路段,确定异常轨迹,由于轨迹的关键路段的数量较少,且可以表示该轨迹的主要特征,这样基于轨迹的关键路段,进行异常轨迹检测时,可以提高检测效率和检测准确性。
Description
技术领域
本申请实施例涉及智能出行技术领域,尤其涉及一种轨迹检测方法、装置、电子设备及存储介质。
背景技术
在智能交通等技术领域中,为保证地图或路网信息的准确性和时效性,需要获取有效的轨迹数据对地图或路网信息进行更新。在一些情况下,轨迹数据提供方由于一些原因,可能会对原始轨迹数据进行作弊处理,生成作弊轨迹数据,因此,在使用轨迹数据对地图或路网信息进行更新之前,首先需要对这些轨迹数据进行检测,以剔除异常轨迹数据。
目前,通过确定两条轨迹之间的相似度来确定异常轨迹,例如通过计算两条轨迹坐标序列的距离,来确定两条轨迹之间的相似度;或者,基于神经网络的相似度度量,确定两条轨迹之间的相似度;或者,基于语义信息的相似度计算,确定两条轨迹之间的相似度。
但是,上述各方法在确定两条轨迹之间的相似度时,均存在计算量大,且计算不准确的问题。
发明内容
本申请实施例提供一种轨迹检测方法、装置、电子设备及存储介质,以降低轨迹检测的计算量,提高检测准确性。
第一方面,本申请实施例提供一种轨迹检测方法,包括:
基于预设时间段内所上报的M个轨迹点,构造N条轨迹,所述M、N均为大于1的正整数;
确定所述N条轨迹中每条轨迹所匹配的路段;
根据所述每条轨迹所匹配的路段的属性信息和所述路段对应的轨迹点的运动信息中的至少一个,确定每条轨迹的关键路段;
根据所述N条轨迹中每条轨迹的关键路段,确定所述N条轨迹中的异常轨迹。
第二方面,本申请实施例提供一种轨迹检测装置,包括:
构造单元,用于基于预设时间段内所上报的M个轨迹点,构造N条轨迹,所述M、N均为大于1的正整数;
路段确定单元,用于确定所述N条轨迹中每条轨迹所匹配的路段;
关键路段确定单元,用于根据所述每条轨迹所匹配的路段的属性信息和所述路段对应的轨迹点的运动信息中的至少一个,确定每条轨迹的关键路段;
异常轨迹确定单元,用于根据所述N条轨迹中每条轨迹的关键路段,确定所述N条轨迹中的异常轨迹。
在一些实施例中,关键路段确定单元,具体用于针对所述N条轨迹中的第i条轨迹,根据所述第i条轨迹所匹配的K个路段中每个路段的属性信息,确定所述K个路段中每个路段的第一重要度,所述i为从1到N的正整数;根据所述K个路段中每个路段对应的轨迹点的运动信息,确定所述K个路段中每个路段的第二重要度;根据所述K个路段中每个路段的第一重要度和第二重要度中的至少一个,确定所述第i条轨迹的关键路段。
在一些实施例中,所述路段的属性信息包括与所述路段相连的路段数量、所述路段的功能等级、所述路段与下一相邻路段之间的角度、所述路段的周围预设范围内的路段数量中的至少一个,关键路段确定单元,具体用于针对所述K个路段中的第j个路段,确定与所述第j个路段相连的第一路段数量、所述第j个路段的功能等级、所述第j个路段与下一相邻路段之间的角度、所述第j个路段的周围预设范围内的第二路段数量中的至少一个,所述j为从1到K的正整数;根据所述第一路段数量、所述功能等级、所述角度和所述第二路段数量中的至少一个,确定所述第j个路段的第一重要度。
在一些实施例中,关键路段确定单元,具体用于将所述第一路段数量、所述功能等级、所述角度和所述第二路段数量中的至少一个的加权和,确定为所述第j个路段的第一重要度。
在一些实施例中,关键路段确定单元,具体用于对所述第一路段数量、所述功能等级、所述角度和所述第二路段数量中的至少一个进行标准化处理;将标准化处理后的所述第一路段数量、所述功能等级、所述角度、所述第二路段数量中的至少一个的加权和,确定为所述第j个路段的第一重要度。
在一些实施例中,关键路段确定单元,具体用于分别确定所述第j个路段的第一方向角和所述下一相邻路段的第二方向角;若所述第一方向角与所述第二方向角之间的第一差值小于或等于第一预设值,则将所述第一差值确定为所述第j个路段与所述下一相邻路段之间的角度;若所述第一差值大于所述第一预设值,则将第二预设值与所述第一差值之间的第二差值,确定为所述第j个路段与所述下一相邻路段之间的角度。
在一些实施例中,关键路段确定单元,具体用于针对所述K个路段中的第j个路段,若所述第j个路段对应的各轨迹点中至少一个轨迹点的运动信息大于预设阈值,则确定所述第j个路段的第二重要度为第一数值,所述j为从1到K的正整数;若所述第j个路段对应的各轨迹点的运动信息均小于或等于所述预设阈值,则确定所述第j个路段的第二重要度为第二数值,所述第二数值小于所述第二数值。
在一些实施例中,所述轨迹点的运动信息包括速度、加速度、方向角、转角中的至少一个。
可选的,所述第一数值为1,所述第二数值为0。
在一些实施例中,关键路段确定单元,具体用于将所述K个路段中所述第一重要度大于预设阈值,且所述第二重要度等于第一数值的路段,确定为所述第i条轨迹的关键路段。
在一些实施例中,异常轨迹确定单元,具体用于根据所述N条轨迹中每条轨迹的关键路段,确定所述N条轨迹中每两条轨迹之间的相似度;将所述N条轨迹中所述相似度大于预设值的轨迹,确定为所述异常轨迹。
在一些实施例中,异常轨迹确定单元,具体用于针对所述N条轨迹中的第一轨迹和第二轨迹,确定所述第一轨迹的关键路段与所述第二轨迹的关键路段之间的相似度,所述第一轨迹和第二轨道均为所述N条轨迹中的任一轨迹,且所述第一轨迹与所述第二轨迹不同;将所述第一轨迹的关键路段与所述第二轨迹的关键路段之间的相似度,确定为所述第一轨迹与所述第二轨迹之间的相似度。
在一些实施例中,异常轨迹确定单元,具体用于确定所述第一轨迹的关键路段与所述第二轨迹的关键路段之间的距离;根据所述距离,确定所述第一轨迹的关键路段与所述第二轨迹的关键路段之间的相似度。
在一些实施例中,所述距离为编辑距离、余弦距离、杰卡德距离中的任意一个。
在一些实施例中,构造单元,具体用于根据所述预设时间段内所上报的轨迹点所包括的时间信息和标识,将同一个标识下的各轨迹点按照时间顺序进行排列构成一个轨迹,得到所述N条轨迹。
在一些实施例中,构造单元,具体用于剔除所述M个轨迹点中的异常轨迹点,得到P个正常轨迹点,所述P为大于1且小于或等于M的正整数;基于所述P个正常轨迹点,构造所述N条轨迹。
第三方面,提供了一种计算设备,包括处理器和存储器。所述存储器用于存储计算机程序,所述处理器用于调用并运行所述存储器中存储的计算机程序,以执行上述第一方面或其各实现方式中的方法。
第四方面,提供了一种芯片,用于实现上述第一方面中任一方面或其各实现方式中的方法。具体地,所述芯片包括:处理器,用于从存储器中调用并运行计算机程序,使得安装有所述芯片的设备执行如上述第一方面中任一方面或其各实现方式中的方法。
第五方面,提供了一种计算机可读存储介质,用于存储计算机程序,所述计算机程序使得计算机执行上述第一方面中任一方面或其各实现方式中的方法。
第六方面,提供了一种计算机程序产品,包括计算机程序指令,所述计算机程序指令使得计算机执行上述第一方面中任一方面或其各实现方式中的方法。
第七方面,提供了一种计算机程序,当其在计算机上运行时,使得计算机执行上述第一方面中任一方面或其各实现方式中的方法。
综上,本申请基于预设时间段内所上报的M个轨迹点,构造N条轨迹,M、N均为大于1的正整数;确定N条轨迹中每条轨迹所匹配的路段;根据每条轨迹所匹配的路段的属性信息和路段对应的轨迹点的运动信息中的至少一个,确定每条轨迹的关键路段;根据N条轨迹中每条轨迹的关键路段,确定N条轨迹中的异常轨迹。即本申请实施例,通过确定轨迹的关键路段,确定异常轨迹,由于轨迹的关键路段的数量较少,且可以表示该轨迹的特征,这样基于轨迹的关键路段,进行异常轨迹检测时,可以降低待处理的数据量,进而提高检测效率,且上述关键路段可以表示该轨迹的主要特征,基于关键路径进行异常轨迹检测时,可以提高检测的准确性。
附图说明
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本申请的实施例,并与说明书一起用于解释本申请的原理。
图1为本申请实施例的一种应用场景示意图;
图2为本申请一实施例提供的轨迹检测方法流程示意图;
图3为一轨迹示意图;
图4为本申请实施例涉及的轨迹点纠正示意图;
图5为本申请实施例涉及路网匹配示意图;
图6为本申请实施例涉及的一种道路示例图;
图7为本申请一实施例提供的轨迹检测方法流程示意图;
图8为本申请实施例提供的轨迹检测装置的一种结构示意图;
图9是本申请实施例提供的计算设备的示意性框图。
具体实施方式
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行描述。
本申请实施例应用于地图等技术领域。
应理解,在本发明实施例中,“与A对应的B”表示B与A相关联。在一种实现方式中,可以根据A确定B。但还应理解,根据A确定B并不意味着仅仅根据A确定B,还可以根据A和/或其它信息确定B。
在本申请的描述中,除非另有说明,“多个”是指两个或多于两个。
另外,为了便于清楚描述本申请实施例的技术方案,在本申请的实施例中,采用了“第一”、“第二”等字样对功能和作用基本相同的相同项或相似项进行区分。本领域技术人员可以理解“第一”、“第二”等字样并不对数量和执行次序进行限定,并且“第一”、“第二”等字样也并不限定一定不同。
本申请实施例可以应用于地图、交通、自动驾驶、车载等领域。
智能交通系统(Intelligent Traffic System,ITS)又称智能运输系统(Intelligent Transportation System),是将先进的科学技术(信息技术、计算机技术、数据通信技术、传感器技术、电子控制技术、自动控制理论、运筹学、人工智能等)有效地综合运用于交通运输、服务控制和车辆制造,加强车辆、道路、使用者三者之间的联系,从而形成一种保障安全、提高效率、改善环境、节约能源的综合运输系统。
对本申请实施例涉及的相关概念进行介绍。
GPS轨迹点:具有GPS模块设备实时接收GPS信号进行定位并生成坐标点,并通过网络回传至后台,通常由端上设备将轨迹进行上报至渠道商,渠道商进行匿名,合规处理后上传给大数据购买方。
GPS轨迹:将GPS轨迹点按时间先后顺序连接在一起形成轨迹线(串)。
道路更新:利用轨迹或图片对地图中要素的属性进行更新,或者添加删除要素等。
路段(link):在电子地图中对现实路网进行抽象,每一段路网抽象成一个link,该link具有坐标点串标识其所在位置,同时具有系列属性,标记该路段上的属性(如车信,交通标志,车道数,长度,宽度等)。
轨迹作弊:渠道商接收到智能设备端上GPS轨迹点后,将一个设备的轨迹进行偏移变化,生成多条轨迹,进行上传至轨迹数据购买方。
图1为本申请实施例的一种应用场景示意图,如图1所示包括:多个终端设备101、渠道商设备102和服务器103。
在该图1所示的应用场景中,上述多个终端设备101将采集的轨迹点数据,例如GPS轨迹点数据发送给渠道商设备102。渠道商设备102对这些定位轨迹数据进行匿名,合规处理,可选的,渠道商设备102可能还会对终端设备101上报的轨迹点进行作弊处理,以增加数据量,例如增加噪声、进行偏移等处理,生成作弊数据。接着,渠道商设备102将处理后的定位轨迹数据上报给服务器103。服务器103根据本申请实施例提供的轨迹检测方法对渠道商设备102上报的定位轨迹数据进行检测。可选的,服务器103还可以使用检测合格后的定位轨迹数据进行地图或路网等数据的更新。可选的,数据购买方还可以根据服务器103的检测结果,向渠道商进行追责。
也就是说,在图1所示的场景中,由渠道商设备102对定位轨迹数据进行处理后上报给服务器103。
在一些实施例中,本申请实施例的多个终端设备101可以是同一个渠道商下的智能设备,也可以是不同渠道商下的智能设备。上述终端设备101主要用于定位,形成轨迹点。
可选的,上述终端设备101可以为车载设备,例如为智能行车记录仪,车机,后视镜等。可选的,该终端设备101还可以其他具有定位功能的设备,例如智能手机、平板电脑(Pad)、带无线收发功能的电脑、虚拟现实(Virtual Reality,VR)用户设备、增强现实(Augmented Reality,AR)用户设备等等,在此不作限定。
渠道商设备102可以是服务器,也可以是其他计算设备,例如为智能终端等,本申请实施例对此不作限制,只要是具有数据处理功能的设备即可。
在一些实施例中,服务器103可以是一台或多台。服务器103是多台时,存在至少两台服务器103用于提供不同的服务,和/或,存在至少两台服务器103用于提供相同的服务,比如以负载均衡方式提供同一种服务,本申请实施例对此不加以限定。其中,上述服务器103可以是独立的物理服务器103,也可以是多个物理服务器103构成的服务器103集群或者分布式系统,还可以是提供云服务、云数据库、云计算、云函数、云存储、网络服务、云通信、中间件服务、域名服务、安全服务、CDN(Content Delivery Network,内容分发网络)、以及大数据和人工智能平台等基础云计算服务的云服务器103。服务器103也可以成为区块链的节点。
需要说明的是,本申请实施例的应用场景包括但不限于图1所示,例如,还可以是终端设备101直接对定位轨迹数据进行匿名、合规和作弊处理后,直接上报给服务器103,省去渠道商设备102。
目前,利用海量智能设备的轨迹数据更新道路,或者利用轨迹数据挖掘现实世界规律时,轨迹原始数据特别重要,如果有作弊轨迹,假轨迹不仅影响挖掘数据的准确性,还会影响设备众包更新道路的有效率,更新周期,甚至会引起更新错误,所以需要检测出作弊轨迹,确保质量和成本。目前轨迹数据中不带有唯一的设备标识,所以需要通过轨迹间的相似度进行检测。
目前的轨迹的相似度检测方法主要分为3类,第一类通过两条轨迹坐标序列的距离计算;第二类基于神经网络的相似度度量;第四类基于语义信息的相似度计算。
基于两条轨迹坐标序列的距离计算,距离计算方法包括:欧式距离,豪斯多夫距离、LCSS(Longest Common Subsequence,最长公共字串)、EPR、EDR(Edit Distance onReal,编辑距离)、DTW(Dynamic Time Warping,动态时间规整),椭圆不定运动都是结合欧式距离的基础上进行度量,利用时空关系匹配轨迹间的坐标点进行计算。
基于神经网络的相似度度量方法,是利用深度学习的算法用嵌入向量来标识轨迹,并计算轨迹间的相似度。
基于语义信息的相似度计算方法,是将轨迹上的停留点,POI(兴趣点)等信息作为语义信息进行计算。
但是,面对低精度的轨迹数据或者轨迹数据存在漂移和混乱的情况下,上述基于神经网络的相似度度量方法和基于语义信息的相似度计算方法会存在较大的偏差,两条作弊轨迹,其中一条加入部分跳点后,语义信息和神经网络序列化信息变化很大,导致最后结果差距大。
而基于两条轨迹坐标序列的距离计算方法,当作弊轨迹为原始轨迹的片段时,会出现较大误差,导致部分作弊轨迹无法识别出来。同时面对噪声数据,其抗噪能力差,在行车记录仪等设备在城市峡谷中使用时其轨迹质量本来就差,加上任务的作弊,导致轨迹更难被识别出来。
另外,上述各方法计算效率低,计算速度慢且复杂度高,在设备众包的业务场景下,由于轨迹数据量大且多,导致计算资源消耗大。
为了解决目前轨迹数据检测中检测不准确且计算量大的问题,本申请实施例根据轨迹所匹配的路段的属性信息和路段对应的轨迹点的运动信息中的至少一个,确定轨迹的关键路段,根据轨迹的关键路段,确定异常轨迹,进而降低了轨迹数据检测的计算量,且提高了检测准确性。
下面通过一些实施例对本申请实施例的技术方案进行详细说明。下面这几个实施例可以相互结合,对于相同或相似的概念或过程可能在某些实施例不再赘述。
图2为本申请一实施例提供的轨迹检测方法流程示意图,本申请实施例的执行主体为具有轨迹检测功能的装置,例如轨迹检测装置,该轨迹检测装置可以为上述图1所示的服务器101的一部分,也可以为上述服务器101。为了便于描述,下面实施例以执行主体为服务器101为例。
如图3所示,本申请实施例的轨迹检测方法包括如下步骤:
S201、基于预设时间段内所上报的M个轨迹点,构造N条轨迹。
其中,M、N均为大于1的正整数,且M大于N,每一条轨迹包括至少两个轨迹点。
本申请实施例的轨迹点也称为定位点,即终端设备在运动过程中,终端设备的运动位置点。
本申请实施例对定位系统不做限制,例如可以为GPS定位系统、北斗定位系统等。
若本申请实施例使用的定位系统为GPS定位系统,则上述轨迹点也称为GPS轨迹点。
若本申请实施例使用的定位系统为北斗定位系统,则上述轨迹点也称为北斗轨迹点。
轨迹作为一种时空数据,指的是某物体在空间中的移动路段,通常表示为离散的轨迹点序列构成的曲线,如图3所示。其中轨迹点pi=(lat,lng,t),表示该物体在t时刻位于地理坐标位置(lat,lng)上,其中lat和lng分别表示纬度和经度。
以图1所示的应用场景为例,终端设备101将采集的轨迹点数据发送给渠道商设备102。渠道商设备102对这些轨迹点数据进行匿名,合规处理后发送给服务器103。可选的,渠道商设备102在数据处理时,可能还会对终端设备101上报的轨迹点数据进行作弊处理,以增加数据量获取更多回报,例如增加噪声、进行偏移等处理,生成作弊数据。接着,渠道商设备102将处理后的轨迹点数据上报给服务器103。服务器103根据本申请实施例提供的轨迹检测方法对渠道商设备102上报的轨迹点数据进行检测。
在一些实施例中,终端设备101实时将轨迹点数据发送给渠道商设备102,渠道商设备102按照预设的时间周期向服务器103上报处理后的轨迹点数据。
在一些实施例中,终端设备101按照预设的时间周期向渠道商设备102上报采集的轨迹点数据。渠道商设备102对轨迹点数据处理后实时发给服务器103。
也就是说,服务器103获得的轨迹点数据为预设时间段内的轨迹点数据。本申请实施例对该预设时间段的具体取值不做限制,例如为10分钟,5分钟等。
上述以图1所示的场景为例进行说明,在一些实施例中,终端设备101还可以直接将轨迹点数据直接上报给服务器103,不需要通过中间的渠道商设备102。
服务器获得预设时间段内所上报的M个轨迹点后,基于这M个轨迹点构造N条轨迹。
本申请实施例的各轨迹点包括时间信息和标志,其中时间信息可以理解为终端设备处于该轨迹点时的时间,标志可以理解为轨迹标志或者为设备标志,用于指示该轨迹点属于哪条轨迹。本申请实施例在构建轨迹时,基于轨迹点的时间信息和标志来构建,具体包括如下步骤:
S201-A、根据预设时间段内所上报的轨迹点所包括的时间信息和标识,将同一个标识下的各轨迹点按照时间顺序进行排列构成一个轨迹,得到N条轨迹。
具体是,根据轨迹点所包括的标识,将同一个标识下的轨迹点分在一个轨迹点组中,这样可以将获得的M个轨迹点分成N个轨迹点组。针对N个轨迹点组中的每一个轨迹点组,将该轨迹点组中的各轨迹点按照时间信息和位置信息进行排序,可以绘制出该轨迹点组对应的一个轨迹,进而可以得到N条轨迹。
在一些实施例中,在轨迹点采集过程中由于网络或设备等原因,存在采集不准确的问题,因此为了提高轨迹的构建准确性,在构建轨迹之前,本申请实施例先对获得的M个轨迹点进行预处理。
也就是说,在执行上述S201之前,本申请实施例还包括如下预处理的步骤:
S200、剔除M个轨迹点中的异常轨迹点,得到P个正常轨迹点。
其中, P为大于1且小于或等于M的正整数。
本申请实施例中,剔除M个轨迹点中的异常轨迹点的方式至少包括如下各示例中的一个示例。
示例1,剔除M个轨迹点中没有时间信息和/或没有坐标信息和/或没有标识的轨迹点。
示例2,对轨迹点中时间信息错乱的轨迹点进行纠正,例如如图4所示,b点时间信息错误时,可以利用前后a点和c点进行纠正。
示例性的,通过如下面公式(1)进行时间信息纠正:
Tb = Ta + (Tc-Ta)* (dis(a,b)/dis(a,c))(1)
其中,Tb为纠正后的b点的时间信息,Ta为a点的时间信息,Tc为c点的时间信息,dis(a,b)为a点与b点之间的距离,可以根据a点的坐标(xa,ya),以及b点的坐标(xb,yb)确定,dis(a,c)为a点与c点之间的距离,可以根据a点的坐标(xa,ya),以及c点的坐标(xc,yc)确定。根据上述公式(1)可以对M个轨迹点中时间信息错误的点进行纠正。
示例3,若同一个轨迹点组中,前后两个轨迹点的所有属性都一致,则删除后面一个轨迹点。
需要说明的是,上述S200中剔除M个轨迹点中的异常轨迹点,得到P个正常轨迹点的方式,除了上述各示例外,还可以包括其他的方式,本申请实施例对此不作限制。
服务器根据上述方式,中剔除M个轨迹点中的异常轨迹点,得到P个正常轨迹点后,基于P个正常轨迹点,构造N条轨迹。其中,基于P个正常轨迹点,构造N条轨迹的过程与上述S201-A的方式相同,参照上述S201-A的描述,在此不再赘述。
根据上述步骤,得到M个轨迹点对应的N条轨迹后,执行如下S202的步骤。
S202、确定N条轨迹中每条轨迹所匹配的路段。
路网数据由多个路段(link)组成,路段可以理解为道路的中心线,可以表征一段道路。
根据上述步骤,得到N条轨迹后,将这N条轨迹与路网进行匹配,可以得到N条轨迹中每一条轨迹所匹配的路段(link)。
本申请实施例对确定N条轨迹中每一条轨迹所匹配的路段的方法不做限制。
在一种可能的实现方式中,可以使用HMM算法得到轨迹所吸附的对应的路段,得到轨迹对应的时序路段串。接着,遍历轨迹上的每个轨迹点,计算距离每个轨迹点最近的路段,得到轨迹点与路段的关系。
例如图5所示,通过路网匹配,将原始轨迹与路网数据进行匹配,得到该轨迹所匹配的路段包括两个路段,分别为路段1和路段2。
S203、根据每条轨迹所匹配的路段的属性信息和路段对应的轨迹点的运动信息中的至少一个,确定每条轨迹的关键路段。
本申请实施例中,N条轨迹中每一条轨迹确定关键路段的方式相同。为例便于描述,本申请实施例以N条轨迹中的任意一条轨迹为例进行说明。
本申请实施例中,确定轨迹的关键路段的方式包括但不限于如下几种方式:
方式一,根据该轨迹所匹配的路段的属性信息,从该轨迹所匹配的各路段中确定关键路段。
方式二,根据该轨迹所匹配的路段对应的轨迹点的运动信息,从该轨迹所匹配的各路段中确定关键路段。
方式三,根据该轨迹所匹配的路段的属性信息和路段对应的轨迹点的运动信息,从该轨迹所匹配的各路段中确定关键路段。
在一些实施例中,路段的属性信息包括基础属性,例如道路等级,属性,功能,路口等。
在一些实施例中,路段对应的轨迹点的运动信息包括速度、角加速度等信息。
本申请实施例,根据轨迹所匹配的路段的属性信息和路段对应的轨迹点的运动信息中的至少一个,确定该轨迹的关键路段,轨迹的关键路段的数量较少,且可以表示该轨迹的特征,这样基于轨迹的关键路段,进行异常轨迹检测时,可以降低待处理的数据量,进而提高检测效率,且上述关键路段可以表示该轨迹的主要特征,基于关键路径进行异常轨迹检测时,可以提高检测的准确性。
在一些实施例中,上述S203包括如下S203-A至S203-C的步骤:
S203-A、针对N条轨迹中的第i条轨迹,根据第i条轨迹所匹配的K个路段中每个路段的属性信息,确定K个路段中每个路段的第一重要度。
其中,i为从1到N的正整数。
为了便于描述,在此以N条轨迹中的第i条轨迹为例进行说明。
本申请实施例中,首先根据第i个轨迹所匹配的各路段的属性信息,确定每个路段的第一重要度,以及,根据各路段所对应的轨迹点的运动信息,确定每个路段的第二重要度,根据每个路段的第一重要度和第二重要度中的至少一个,确定出该第i条轨迹的关键路段。
本申请实施例中根据第i条轨迹所匹配的K个路段中每个路段的属性信息,确定K个路段中每个路段的第一重要度的方式包括但不限于如下几种:
方式一,根据路段的属性信息中的道路等级,根据道路等级,确定路段的第一重要度,其中道路等级越高,对应的路段的第一重要度越高。
方式二,路段的属性信息包括与路段相连的路段数量、路段的功能等级、路段与下一相邻路段之间的角度、路段的周围预设范围内的路段数量中的至少一个,则上述S203-A包括如下步骤:
S203-A1、针对K个路段中的第j个路段,确定与第j个路段相连的第一路段数量、第j个路段的功能等级、第j个路段与下一相邻路段之间的角度、第j个路段的周围预设范围内的第二路段数量中的至少一个,j为从1到K的正整数;
S203-A2、根据第一路段数量、功能等级、角度和第二路段数量中的至少一个,确定第j个路段的第一重要度。
本申请实施例中,第i个轨迹所匹配的路段包括K个路段,确定这K个路段中每个路段的第一重要度的方式一致,为了便于描述,本申请实施例,以K个路段中的第j个路段为例进行说明。
本申请实施例的路段的属性信息包括与路段相连的路段数量、路段的功能等级、路段与下一相邻路段之间的角度、路段的周围预设范围内的路段数量中的至少一个,因此,在确定第j个路段的第一重要度之前,首先需要确定该第j个路段的属性信息,即确定与第j个路段相连的第一路段数量、第j个路段的功能等级、第j个路段与下一相邻路段之间的角度、第j个路段的周围预设范围内的第二路段数量中的至少一个。
以第j个路段为图6所示的路段A为例。
与路段A连接的路段为路段D、路段C和路段B,因此,与路段A连接的路段数量LO_num为3。本申请实施例为了便于描述,将与路段A连接的路段数量LO_num记为第一路段数量。
示例性的,路段功能等级KindA分别为1到5共5个等级,等级越高其越重要,等级5通常为高速,城市快速路等。
路段A的周围预设范围内的路段为路段D、路段C、路段B和路段E,共4个路段,因此,路段A周围预设范围内的路段数量AR_num为4。本申请实施例为了便于描述,将路段A周围预设范围内的路段数量AR_num记为第二路段数量。
路段A的下一相邻路段为路段B,确定路段A与路段B之间的角度angleAB,以确定路段A是直线路段、转弯路段还是掉头路段等。例如图6所示,路段A与路段B之间的角度为0,表示,路段A不是转弯路段。
在一些实施例中,可以根据如下方式确定出第j个路段与相邻的下一相邻路段之间的角度:
步骤1,分别确定第j个路段的第一方向角和下一相邻路段的第二方向角。
可选的,路网数据中包括各路段的方向角,这样服务器可以从路网数据中获得第j个路段的第一方向角,以及第j个路段的下一相邻路段的第二方向角。
步骤2,若第一方向角与第二方向角之间的第一差值小于或等于第一预设值,则将第一差值确定为第j个路段与下一相邻路段之间的角度;
步骤3,若第一差值大于第一预设值,则将第二预设值与第一差值之间的第二差值,确定为第j个路段与下一相邻路段之间的角度。
本申请实施例对第一预设值和第二预设值的具体取值不做限制。
可选的,第一预设值为180度,第二预设值为360度。
在一种可能的实现方式中,根据如下公式(2)确定第j个路段与下一相邻路段之间的角度:

其中,angle为第j个路段与下一相邻路段之间的角度,Aangle为第j个路段的方向角,记为第一方向角,Bangle为下一相邻路段的方向角,记为第二方向角。
根据上述方法,确定出第j个路段的属性信息,即确定出与第j个路段相连的第一路段数量、第j个路段的功能等级、第j个路段与下一相邻路段之间的角度、第j个路段的周围预设范围内的第二路段数量中的至少一个后,根据上述确定的第一路段数量、功能等级、角度和第二路段数量中的至少一个,确定第j个路段的第一重要度。
本申请实施例中S203-A2的实现方式包括但不限于如下几种:
方式一,将第一路段数量、第j个路段的功能等级、第j个路段与下一相邻路段之间的角度和第二路段数量中的至少一个的和,确定为第j个路段的第一重要度。
方式二,将第一路段数量、第j个路段的功能等级、第j个路段与下一相邻路段之间的角度和第二路段数量中的至少一个的平均值,确定为第j个路段的第一重要度。
方式三,将第一路段数量、第j个路段的功能等级、第j个路段与下一相邻路段之间的角度和第二路段数量中的至少一个的加权和,确定为第j个路段的第一重要度。
例如,将第一路段数量、第j个路段的功能等级、第j个路段与下一相邻路段之间的角度和第二路段数量的加权和,确定为第j个路段的第一重要度。
示例性的,根据如下公式(3),确定出第j个路段的第一重要度:
Link_VA=w1*LO_NumA+w2*kindA +w3*AR_NumA+w4*angleAB(3)
其中,Link_VA为第j个路段的第一重要度,LO_NumA为与第j个路段相连的第一路段数量,kindA为第j个路段的功能等级,AR_NumA为第j个路段的周围预设范围内的第二路段数量,angleAB为第j个路段与下一相邻路段之间的角度。
上述各信息对应的权重可以为预设值,或者为经验值,本申请对此不做限制。
在一些实施例中,上述各信息对应的权重的和为1,即w1+w2+w3+ w4+w5=1。
在一些实施例中,在执行上述方式三之前,本申请实施例还包括对第一路段数量、功能等级、角度和第二路段数量中的至少一个进行标准化处理,将标准化处理后的第一路段数量、功能等级、角度、第二路段数量中的至少一个的加权和,确定为第j个路段的第一重要度。
在一种可能的实现方式中,可以使用如下公式(4)所示的标准化公式对上述各信息进行标准化处理。
以对第j个路段的第一路段数量进行标准化为例,x为第j个路段的第一路段数量,min为K个路段的第一路段数量中的最小值,max为K个路段的第一路段数量中的最大值,根据上述公式(4),可以确定出标准化后的第j个路段的第一路段数量x*。其他信息的标准化过程与该第一路段数量的标准化过程一致,参照即可。
根据上述方法对第j个路段的第一路段数量、功能等级、角度和第二路段数量中的至少一个进行标准化处理,将第j个路段标准化处理后的第一路段数量、功能等级、角度、第二路段数量中的至少一个的加权和,确定为第j个路段的第一重要度。
可选的,在一些实施例中,还可以通过投票或阈值法确定路段的第一重要度。
S203-B、根据K个路段中每个路段对应的轨迹点的运动信息,确定K个路段中每个路段的第二重要度。
本申请实施例的轨迹点不仅包括时间信息、位置信息和标识,还包括运动信息。其中轨迹点的运动信息可以理解为终端设备在该轨迹点时的速度、加速度等运动信息。
本申请实施例的轨迹由轨迹点依次连接而成,在确定出轨迹匹配的路段后,可以确定出各路段对应的轨迹点,如图5所示,路段1对应的轨迹点为图5所示的轨迹中位于图5上方接近水平方向的轨迹点。这样,本申请实施例可以根据K个路段中每个路段对应的轨迹点的运动信息,确定K个路段中每个路段的第二重要度。
上述S203-B中根据K个路段中每个路段对应的轨迹点的运动信息,确定K个路段中每个路段的第二重要度的方式包括但不限于如下几种:
方式一,针对K个路段中的每个路段,将该路段对应的轨迹点的运动信息的平均值,确定为该路段的第二重要度。
方式二,将该路段对应的轨迹点的运动信息中的最大值,确定为该路段的第二重要度。
方式三,上述S203-B包括如下步骤:
S203-B1、针对K个路段中的第j个路段,若第j个路段对应的各轨迹点中至少一个轨迹点的运动信息大于预设阈值,则确定第j个路段的第二重要度为第一数值,j为从1到K的正整数;
S203-B2、若第j个路段对应的各轨迹点的运动信息均小于或等于预设阈值,则确定第j个路段的第二重要度为第二数值,第二数值小于第二数值。
该方式三中,将路段的第二重要度分为两个值,一个是第一数值,另一个是第二数值。
具体的,若第j个路段对应的各轨迹点中至少一个轨迹点的运动信息大于预设阈值,则说明终端设备在运动信息大于预设阈值的轨迹点处行为发生突变,例如突然加速或突然减速,或者突然转向等,将该第j个路段记为该轨迹的关键路段,此时确定第j个路段的第二重要度为第一数值。
若第j个路段对应的各轨迹点的运动信息均小于或等于预设阈值,则说明终端设备在第j个路段处行为未发生突变,将该第j个路段记为该轨迹的非关键路段,此时确定第j个路段的第二重要度为第二数值。
本申请实施例对轨迹点的运动信息的具体取值不做限制。
在一种示例中,轨迹点的运动信息包括速度、加速度、方向角、转角、距离等中的至少一个。
本申请实施例对第一数值和第二数值的具体取值不做限制,只是保证第一数值和第二数值均为正数,且第一数值大于第二数值即可。
在一种可能的示例中,第一数值为1,第二数值为0。
在一些实施例中,可以根据如下公式(5)确定路段的第二重要度:

其中,Link_UA为第j个路段的第二重要度,本申请实施例中,若第j个路段对应的轨迹点中存在至少一个加速度异常,即加速度大于预设加速度阈值,或速度异常,即速度大于预设速度阈值,则确定该第j个路段的第二重要度为1。若第j个路段对应的各轨迹点的运动信息均正常,例如速度和加速度等均小于对应的预设阈值,则确定该第j个路段的第二重要度为0。
根据上述方式,确定出第i条轨迹所匹配的K个路段中每个路段的第一重要度和第二重要度,接着,执行如下S203-C。
S203-C、根据K个路段中每个路段的第一重要度和第二重要度中的至少一个,确定第i条轨迹的关键路段。
本申请实施例中,S203-C中根据K个路段中每个路段的第一重要度和第二重要度中的至少一个,确定第i条轨迹的关键路段至少包括如下几种示例:
示例1,根据K个路段中每个路段的第一重要度,确定第i条轨迹的关键路段,例如将K个路段中第一重要度大于某一预设值的路段,确定为第i条轨迹的关键路段。
示例2,根据K个路段中每个路段的第二重要度,确定第i条轨迹的关键路段,例如将K个路段中第二重要度大于某一预设值的路段,确定为第i条轨迹的关键路段。
示例3,根据K个路段中每个路段的第一重要度和第二重要度,确定第i条轨迹的关键路段。
在示例3的一种实现方式中,将K个路段中第一重要度大于预设值1,且第二重要度大于预设值2的路段,确定为第i条轨迹的关键路段。
在示例3的一种实现方式中,将K个路段中所述第一重要度大于预设阈值,且第二重要度等于第一数值的路段,确定为第i条轨迹的关键路段。
本申请实施例对上述预设阈值的具体取值不做限制,具体根据实际需要确定。
可选的,上述预设阈值为0.8。
可选的,上述第一数值为1。
示例性的,从第i条轨迹匹配的K个路段中,筛选出Link_UA=1且Link_UA>0.8的路段,确定为第i条轨迹的关键路段。
上述实施例以确定N条轨迹中的第i条轨迹的关键路段为例,其他轨迹的关键路段的确定过程参照第i条轨迹即可。
S204、根据N条轨迹中每条轨迹的关键路段,确定N条轨迹中的异常轨迹。
根据上述方法,确定出N条轨迹中每条轨迹的关键路段后,根据N条轨迹中每条轨迹的关键路段,确定N条轨迹中的异常轨迹。
本申请实施例对根据N条轨迹中每条轨迹的关键路段,确定N条轨迹中的异常轨迹的方式不做限制。
在一些实施例中,上述S204包括:将N条轨迹的关键路段进行相互比较,判断两两轨迹之间的关键路段是否相同,若两条轨迹的关键路段相同,则确定这两条轨迹为异常轨迹。
在一些实施例中,上述S204包括如下步骤:
S204-A1、根据N条轨迹中每条轨迹的关键路段,确定N条轨迹中每两条轨迹之间的相似度;
S204-A2、将N条轨迹中相似度大于预设值的轨迹,确定为异常轨迹。
在该实施例中,轨迹的关键路段为轨迹所匹配的众多路段中的少数路段,例如第i个轨迹匹配的路段为40个,关键路段为4个。也就是说,轨迹的关键路段所包括的数据量少,基于少量数据的轨迹关键路段,确定轨迹之间的相似度时,可以大大降低计算复杂度,提高计算效率。
另外,轨迹的关键路段可以体现轨迹的主要特征,这样基于轨迹的关键路段进行轨迹的相似度计算时,可以提高相似度计算的准确性,进而提高异常轨迹的检测准确性。
在一些实施例中,上述S204-A1包括:
S204-A11、针对N条轨迹中的第一轨迹和第二轨迹,确定第一轨迹的关键路段与第二轨迹的关键路段之间的相似度。
其中,第一轨迹和第二轨道均为N条轨迹中的任一轨迹,且第一轨迹与第二轨迹不同。
S204-A12、将第一轨迹的关键路段与第二轨迹的关键路段之间的相似度,确定为第一轨迹与第二轨迹之间的相似度。
本申请实施例中,对于N条轨迹中任意两条轨迹,例如第一轨迹和第二轨迹,计算第一轨迹的关键路段组成的路段串1,与第二轨迹的关键路段组成的路段串2之间的相似度,将该相似度确定为第一轨迹与第二轨迹之间的相似度。
本申请实施例对确定第一轨迹的关键路段与第二轨迹的关键路段之间的相似度的方式不做限制。例如可以使用任意确定两个串之间相似度的方式。
在一种可能的实现方式中,上述S204-A12包括如下步骤:
S204-A121、确定第一轨迹的关键路段与第二轨迹的关键路段之间的距离;
S204-A122、根据该距离,确定第一轨迹的关键路段与第二轨迹的关键路段之间的相似度。
可选的,上述距离为编辑距离、余弦距离、杰卡德距离中的任意一个。
例如,确定第一轨迹的关键路段与第二轨迹的关键路段之间的编辑距离、余弦距离或杰卡德距离,根据该距离确定第一轨迹的关键路段与第二轨迹的关键路段之间的相似度,由于距离越小,表示越相似,因此,可以将某一预设值与距离的差值确定为第一轨迹的关键路段与第二轨迹的关键路段之间的相似度。
以编辑距离为例,可以根据如下公式(6),确定第一轨迹的关键路段与第二轨迹的关键路段之间的编辑距离。
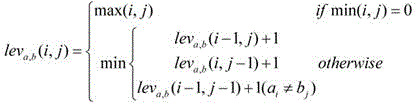
其中,第一轨迹的关键路段与第二轨迹的关键路段之间的编辑距离可以理解为将第一轨迹的关键路段变化为第二轨迹的关键路段,需要经过多少个步骤,步骤越小表示第一轨迹与第二轨迹越相似。
leva,b(i,j)指的是第一轨迹的关键路段串a中前 i 个轨迹点和第二轨迹的关键路段串b 中前 j 个轨迹点之间的距离。
根据上述公式(6)确定出第一轨迹的关键路段与第二轨迹的关键路段之间的编辑距离,根据该编辑距离确定为第一轨迹的关键路段与第二轨迹的关键路段之间的相似度,即编辑距离越小,表示第一轨迹的关键路段与第二轨迹的关键路段越相似。
本申请实施例还可以采用其他的距离计算方法,确定第一轨迹的关键路段与第二轨迹的关键路段之间的距离,本申请实施例对此不作限制。
本申请实施例,通过计算N条轨迹中,每两条轨迹的关键路段之间的相似度,确定每两条轨迹之间的相似度,将N条轨迹中相似度大于预设值的轨迹,确定为异常轨迹。整个计算过程待处理的数据量少,计算速度快。
本申请实施例提供的轨迹检测方法,通过基于预设时间段内所上报的M个轨迹点,构造N条轨迹,M、N均为大于1的正整数;确定N条轨迹中每条轨迹所匹配的路段;根据每条轨迹所匹配的路段的属性信息和路段对应的轨迹点的运动信息中的至少一个,确定每条轨迹的关键路段;根据N条轨迹中每条轨迹的关键路段,确定N条轨迹中的异常轨迹。即本申请实施例,通过确定轨迹的关键路段,确定异常轨迹,由于轨迹的关键路段的数量较少,且可以表示该轨迹的特征,这样基于轨迹的关键路段,进行异常轨迹检测时,可以降低待处理的数据量,进而提高检测效率,且上述关键路段可以表示该轨迹的主要特征,基于关键路径进行异常轨迹检测时,可以提高检测的准确性。
图7为本申请一实施例提供的轨迹检测方法流程示意图,图7可以理解为上述图2所示方法的一具体实施例。如图7所示,本申请实施例的方法包括:
S701、剔除M个轨迹点中的异常轨迹点,得到P个正常轨迹点。
S702、基于P个正常轨迹点,构造N条轨迹。
例如,根据预设时间段内所上报的轨迹点所包括的时间信息和标识,将同一个标识下的各轨迹点按照时间顺序进行排列构成一个轨迹,得到N条轨迹。
上述S701和S702的具体实现过程参照上述S201的描述,在此不再赘述。
S703、确定N条轨迹中每条轨迹所匹配的路段。
上述S703的具体实现过程参照上述S202的描述,在此不再赘述。
S704、针对N条轨迹中的第i条轨迹,根据第i条轨迹所匹配的K个路段中每个路段的属性信息,确定K个路段中每个路段的第一重要度。
例如,针对K个路段中的第j个路段,确定与第j个路段相连的第一路段数量、第j个路段的功能等级、第j个路段与下一相邻路段之间的角度、第j个路段的周围预设范围内的第二路段数量中的至少一个,j为从1到K的正整数;根据第一路段数量、功能等级、角度和第二路段数量中的至少一个,确定第j个路段的第一重要度。例如,将第一路段数量、功能等级、角度和第二路段数量中的至少一个的加权和,确定为第j个路段的第一重要度。或者,对第一路段数量、功能等级、角度和第二路段数量中的至少一个进行标准化处理;将标准化处理后的第一路段数量、功能等级、角度、第二路段数量中的至少一个的加权和,确定为第j个路段的第一重要度。
S705、根据K个路段中每个路段对应的轨迹点的运动信息,确定K个路段中每个路段的第二重要度。
例如,针对K个路段中的第j个路段,若第j个路段对应的各轨迹点中至少一个轨迹点的运动信息大于预设阈值,则确定第j个路段的第二重要度为第一数值,j为从1到K的正整数;若第j个路段对应的各轨迹点的运动信息均小于或等于预设阈值,则确定第j个路段的第二重要度为第二数值,第二数值小于第二数值。
可选的,轨迹点的运动信息包括速度、加速度、方向角、转角中的至少一个。
可选的,第一数值为1,第二数值为0。
S706、将K个路段中第一重要度大于预设阈值,且第二重要度等于第一数值的路段,确定为第i条轨迹的关键路段。
上述S706的具体实现过程参照上述S203的描述,在此不再赘述。
S707、根据N条轨迹中每条轨迹的关键路段,确定N条轨迹中每两条轨迹之间的相似度。
例如,针对N条轨迹中的第一轨迹和第二轨迹,确定第一轨迹的关键路段与第二轨迹的关键路段之间的相似度,其中,第一轨迹和第二轨道均为N条轨迹中的任一轨迹,且第一轨迹与第二轨迹不同;将第一轨迹的关键路段与第二轨迹的关键路段之间的相似度,确定为第一轨迹与第二轨迹之间的相似度。
示例性的,确定第一轨迹的关键路段与第二轨迹的关键路段之间的相似度,包括:确定第一轨迹的关键路段与第二轨迹的关键路段之间的距离;根据距离,确定第一轨迹的关键路段与第二轨迹的关键路段之间的相似度。
可选得,上述距离可以为编辑距离、余弦距离、杰卡德距离中的任意一个。
S708、将N条轨迹中相似度大于预设值的轨迹,确定为异常轨迹。
本申请实施例,针对N条轨迹中每条轨迹,确定每条轨迹所匹配的路段的第一重要度和第二重要度,并根据路段的第一重要度和第二重要度,确定每个轨迹的关键路段。通过计算N条轨迹中每两条轨迹的关键路段之间的相似度,得到N条轨迹中每两条轨迹之间的相似度,将相似度大于预设值的轨迹确定为异常轨迹,整个过程计算量小,提高轨迹检测效率,且关键路段可以表示该轨迹的主要特征,基于关键路径进行异常轨迹检测时,可以提高检测的准确性。
以上结合附图详细描述了本申请的优选实施方式,但是,本申请并不限于上述实施方式中的具体细节,在本申请的技术构思范围内,可以对本申请的技术方案进行多种简单变型,这些简单变型均属于本申请的保护范围。例如,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本申请对各种可能的组合方式不再另行说明。又例如,本申请的各种不同的实施方式之间也可以进行任意组合,只要其不违背本申请的思想,其同样应当视为本申请所公开的内容。
还应理解,在本申请的各种方法实施例中,上述各过程的序号的大小并不意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本申请实施例的实施过程构成任何限定。
上文结合图2至图7,详细描述了本申请的方法实施例,下文结合图8至图9,详细描述本申请的装置实施例。
图8为本申请实施例提供的轨迹检测装置的一种结构示意图。该轨迹检测装置可以是计算设备,也可以是计算设备的部件(例如,集成电路,芯片等等),该计算设备可以为图1所示的服务器。
如图8所示,该轨迹检测装置10包括:
构造单元11,用于基于预设时间段内所上报的M个轨迹点,构造N条轨迹,所述M、N均为大于1的正整数;
路段确定单元12,用于确定所述N条轨迹中每条轨迹所匹配的路段;
关键路段确定单元13,用于根据所述每条轨迹所匹配的路段的属性信息和所述路段对应的轨迹点的运动信息中的至少一个,确定每条轨迹的关键路段;
异常轨迹确定单元14,用于根据所述N条轨迹中每条轨迹的关键路段,确定所述N条轨迹中的异常轨迹。
在一些实施例中,关键路段确定单元13,具体用于针对所述N条轨迹中的第i条轨迹,根据所述第i条轨迹所匹配的K个路段中每个路段的属性信息,确定所述K个路段中每个路段的第一重要度,所述i为从1到N的正整数;根据所述K个路段中每个路段对应的轨迹点的运动信息,确定所述K个路段中每个路段的第二重要度;根据所述K个路段中每个路段的第一重要度和第二重要度中的至少一个,确定所述第i条轨迹的关键路段。
在一些实施例中,所述路段的属性信息包括与所述路段相连的路段数量、所述路段的功能等级、所述路段与下一相邻路段之间的角度、所述路段的周围预设范围内的路段数量中的至少一个,关键路段确定单元13,具体用于针对所述K个路段中的第j个路段,确定与所述第j个路段相连的第一路段数量、所述第j个路段的功能等级、所述第j个路段与下一相邻路段之间的角度、所述第j个路段的周围预设范围内的第二路段数量中的至少一个,所述j为从1到K的正整数;根据所述第一路段数量、所述功能等级、所述角度和所述第二路段数量中的至少一个,确定所述第j个路段的第一重要度。
在一些实施例中,关键路段确定单元13,具体用于将所述第一路段数量、所述功能等级、所述角度和所述第二路段数量中的至少一个的加权和,确定为所述第j个路段的第一重要度。
在一些实施例中,关键路段确定单元13,具体用于对所述第一路段数量、所述功能等级、所述角度和所述第二路段数量中的至少一个进行标准化处理;将标准化处理后的所述第一路段数量、所述功能等级、所述角度、所述第二路段数量中的至少一个的加权和,确定为所述第j个路段的第一重要度。
在一些实施例中,关键路段确定单元13,具体用于分别确定所述第j个路段的第一方向角和所述下一相邻路段的第二方向角;若所述第一方向角与所述第二方向角之间的第一差值小于或等于第一预设值,则将所述第一差值确定为所述第j个路段与所述下一相邻路段之间的角度;若所述第一差值大于所述第一预设值,则将第二预设值与所述第一差值之间的第二差值,确定为所述第j个路段与所述下一相邻路段之间的角度。
在一些实施例中,关键路段确定单元13,具体用于针对所述K个路段中的第j个路段,若所述第j个路段对应的各轨迹点中至少一个轨迹点的运动信息大于预设阈值,则确定所述第j个路段的第二重要度为第一数值,所述j为从1到K的正整数;若所述第j个路段对应的各轨迹点的运动信息均小于或等于所述预设阈值,则确定所述第j个路段的第二重要度为第二数值,所述第二数值小于所述第二数值。
在一些实施例中,所述轨迹点的运动信息包括速度、加速度、方向角、转角中的至少一个。
可选的,所述第一数值为1,所述第二数值为0。
在一些实施例中,关键路段确定单元13,具体用于将所述K个路段中所述第一重要度大于预设阈值,且所述第二重要度等于第一数值的路段,确定为所述第i条轨迹的关键路段。
在一些实施例中,异常轨迹确定单元14,具体用于根据所述N条轨迹中每条轨迹的关键路段,确定所述N条轨迹中每两条轨迹之间的相似度;将所述N条轨迹中所述相似度大于预设值的轨迹,确定为所述异常轨迹。
在一些实施例中,异常轨迹确定单元14,具体用于针对所述N条轨迹中的第一轨迹和第二轨迹,确定所述第一轨迹的关键路段与所述第二轨迹的关键路段之间的相似度,所述第一轨迹和第二轨道均为所述N条轨迹中的任一轨迹,且所述第一轨迹与所述第二轨迹不同;将所述第一轨迹的关键路段与所述第二轨迹的关键路段之间的相似度,确定为所述第一轨迹与所述第二轨迹之间的相似度。
在一些实施例中,异常轨迹确定单元14,具体用于确定所述第一轨迹的关键路段与所述第二轨迹的关键路段之间的距离;根据所述距离,确定所述第一轨迹的关键路段与所述第二轨迹的关键路段之间的相似度。
在一些实施例中,所述距离为编辑距离、余弦距离、杰卡德距离中的任意一个。
在一些实施例中,构造单元11,具体用于根据所述预设时间段内所上报的轨迹点所包括的时间信息和标识,将同一个标识下的各轨迹点按照时间顺序进行排列构成一个轨迹,得到所述N条轨迹。
在一些实施例中,构造单元11,具体用于剔除所述M个轨迹点中的异常轨迹点,得到P个正常轨迹点,所述P为大于1且小于或等于M的正整数;基于所述P个正常轨迹点,构造所述N条轨迹。
应理解的是,装置实施例与方法实施例可以相互对应,类似的描述可以参照方法实施例。为避免重复,此处不再赘述。具体地,图8所示的装置可以执行上述方法的实施例,并且装置中的各个模块的前述和其它操作和/或功能分别为了实现计算设备对应的方法实施例,为了简洁,在此不再赘述。
上文中结合附图从功能模块的角度描述了本申请实施例的装置。应理解,该功能模块可以通过硬件形式实现,也可以通过软件形式的指令实现,还可以通过硬件和软件模块组合实现。具体地,本申请实施例中的方法实施例的各步骤可以通过处理器中的硬件的集成逻辑电路和/或软件形式的指令完成,结合本申请实施例公开的方法的步骤可以直接体现为硬件译码处理器执行完成,或者用译码处理器中的硬件及软件模块组合执行完成。可选地,软件模块可以位于随机存储器,闪存、只读存储器、可编程只读存储器、电可擦写可编程存储器、寄存器等本领域的成熟的存储介质中。该存储介质位于存储器,处理器读取存储器中的信息,结合其硬件完成上述方法实施例中的步骤。
图9是本申请实施例提供的计算设备的示意性框图,该计算设备用于执行上述方法实施例。
如图9所示,该计算设备30可包括:
存储器31和处理器32,该存储器31用于存储计算机程序33,并将该程序代码33传输给该处理器32。换言之,该处理器32可以从存储器31中调用并运行计算机程序33,以实现本申请实施例中的方法。
例如,该处理器32可用于根据该计算机程序33中的指令执行上述方法步骤。
在本申请的一些实施例中,该处理器32可以包括但不限于:
通用处理器、数字信号处理器(Digital Signal Processor,DSP)、专用集成电路(Application Specific Integrated Circuit,ASIC)、现场可编程门阵列(FieldProgrammable Gate Array,FPGA)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等等。
在本申请的一些实施例中,该存储器31包括但不限于:
易失性存储器和/或非易失性存储器。其中,非易失性存储器可以是只读存储器(Read-Only Memory,ROM)、可编程只读存储器(Programmable ROM,PROM)、可擦除可编程只读存储器(Erasable PROM,EPROM)、电可擦除可编程只读存储器(Electrically EPROM,EEPROM)或闪存。易失性存储器可以是随机存取存储器(Random Access Memory,RAM),其用作外部高速缓存。通过示例性但不是限制性说明,许多形式的RAM可用,例如静态随机存取存储器(Static RAM,SRAM)、动态随机存取存储器(Dynamic RAM,DRAM)、同步动态随机存取存储器(Synchronous DRAM,SDRAM)、双倍数据速率同步动态随机存取存储器(Double DataRate SDRAM,DDR SDRAM)、增强型同步动态随机存取存储器(Enhanced SDRAM,ESDRAM)、同步连接动态随机存取存储器(synch 连接 DRAM,SLDRAM)和直接内存总线随机存取存储器(Direct Rambus RAM,DR RAM)。
在本申请的一些实施例中,该计算机程序33可以被分割成一个或多个模块,该一个或者多个模块被存储在该存储器31中,并由该处理器32执行,以完成本申请提供的录制页面的方法。该一个或多个模块可以是能够完成特定功能的一系列计算机程序指令段,该指令段用于描述该计算机程序33在该计算设备中的执行过程。
如图9所示,该计算设备30还可包括:
收发器34,该收发器34可连接至该处理器32或存储器31。
其中,处理器32可以控制该收发器34与其他设备进行通信,具体地,可以向其他设备发送信息或数据,或接收其他设备发送的信息或数据。收发器34可以包括发射机和接收机。收发器34还可以进一步包括天线,天线的数量可以为一个或多个。
应当理解,该计算设备30中的各个组件通过总线系统相连,其中,总线系统除包括数据总线之外,还包括电源总线、控制总线和状态信号总线。
根据本申请的一个方面,提供了一种计算机存储介质,其上存储有计算机程序,该计算机程序被计算机执行时使得该计算机能够执行上述方法实施例的方法。或者说,本申请实施例还提供一种包含指令的计算机程序产品,该指令被计算机执行时使得计算机执行上述方法实施例的方法。
根据本申请的另一个方面,提供了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算设备的处理器从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算设备执行上述方法实施例的方法。
换言之,当使用软件实现时,可以全部或部分地以计算机程序产品的形式实现。该计算机程序产品包括一个或多个计算机指令。在计算机上加载和执行该计算机程序指令时,全部或部分地产生按照本申请实施例该的流程或功能。该计算机可以是通用计算机、专用计算机、计算机网络、或者其他可编程装置。该计算机指令可以存储在计算机可读存储介质中,或者从一个计算机可读存储介质向另一个计算机可读存储介质传输,例如,该计算机指令可以从一个网站站点、计算机、服务器或数据中心通过有线(例如同轴电缆、光纤、数字用户线(digital subscriber line,DSL))或无线(例如红外、无线、微波等)方式向另一个网站站点、计算机、服务器或数据中心进行传输。该计算机可读存储介质可以是计算机能够存取的任何可用介质或者是包含一个或多个可用介质集成的服务器、数据中心等数据存储设备。该可用介质可以是磁性介质(例如,软盘、硬盘、磁带)、光介质(例如数字视频光盘(digital video disc,DVD))、或者半导体介质(例如固态硬盘(solid state disk,SSD))等。
本领域普通技术人员可以意识到,结合本文中所公开的实施例描述的各示例的模块及算法步骤,能够以电子硬件、或者计算机软件和电子硬件的结合来实现。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本申请的范围。
在本申请所提供的几个实施例中,应该理解到,所揭露的系统、装置和方法,可以通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如,该模块的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个模块或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,装置或模块的间接耦合或通信连接,可以是电性,机械或其它的形式。
作为分离部件说明的模块可以是或者也可以不是物理上分开的,作为模块显示的部件可以是或者也可以不是物理模块,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。例如,在本申请各个实施例中的各功能模块可以集成在一个处理模块中,也可以是各个模块单独物理存在,也可以两个或两个以上模块集成在一个模块中。
以上内容,仅为本申请的具体实施方式,但本申请的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本申请揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本申请的保护范围之内。因此,本申请的保护范围应以该权利要求的保护范围为准。
Claims (18)
1.一种轨迹检测方法,其特征在于,包括:
基于预设时间段内所上报的M个轨迹点,构造N条轨迹,所述M、N均为大于1的正整数;
确定所述N条轨迹中每条轨迹所匹配的路段;
根据所述每条轨迹所匹配的路段的属性信息和所述路段对应的轨迹点的运动信息中的至少一个,确定所述每条轨迹的关键路段;
根据所述N条轨迹中每条轨迹的关键路段,确定所述N条轨迹中的异常轨迹;
所述根据每条轨迹所匹配的路段的属性信息和所述路段对应的轨迹点的运动信息中的至少一个,确定所述每条轨迹的关键路段,包括:
针对所述N条轨迹中的第i条轨迹,根据所述第i条轨迹所匹配的K个路段中每个路段的属性信息,确定所述K个路段中每个路段的第一重要度,所述i为从1到N的正整数;
根据所述K个路段中每个路段对应的轨迹点的运动信息,确定所述K个路段中每个路段的第二重要度;
根据所述K个路段中每个路段的第一重要度和第二重要度中的至少一个,确定所述第i条轨迹的关键路段。
2.根据权利要求1所述的方法,其特征在于,所述路段的属性信息包括与所述路段相连的路段数量、所述路段的功能等级、所述路段与下一相邻路段之间的角度、所述路段的周围预设范围内的路段数量中的至少一个,所述根据所述第i条轨迹所匹配的K个路段中每个路段的属性信息,确定所述K个路段中每个路段的第一重要度,包括:
针对所述K个路段中的第j个路段,确定与所述第j个路段相连的第一路段数量、所述第j个路段的功能等级、所述第j个路段与下一相邻路段之间的角度、所述第j个路段的周围预设范围内的第二路段数量中的至少一个,所述j为从1到K的正整数;
根据所述第一路段数量、所述功能等级、所述角度和所述第二路段数量中的至少一个,确定所述第j个路段的第一重要度。
3.根据权利要求2所述的方法,其特征在于,所述根据所述第一路段数量、所述功能等级、所述角度和所述第二路段数量中的至少一个,确定所述第j个路段的第一重要度,包括:
将所述第一路段数量、所述功能等级、所述角度和所述第二路段数量中的至少一个的加权和,确定为所述第j个路段的第一重要度。
4.根据权利要求3所述的方法,其特征在于,所述将所述第一路段数量、所述功能等级、所述角度和所述第二路段数量中的至少一个的加权和,确定为所述第j个路段的第一重要度,包括:
对所述第一路段数量、所述功能等级、所述角度和所述第二路段数量中的至少一个进行标准化处理;
将标准化处理后的所述第一路段数量、所述功能等级、所述角度、所述第二路段数量中的至少一个的加权和,确定为所述第j个路段的第一重要度。
5.根据权利要求2所述的方法,其特征在于,确定所述第j个路段与相邻的下一相邻路段之间的角度,包括:
分别确定所述第j个路段的第一方向角和所述下一相邻路段的第二方向角;
若所述第一方向角与所述第二方向角之间的第一差值小于或等于第一预设值,则将所述第一差值确定为所述第j个路段与所述下一相邻路段之间的角度;
若所述第一差值大于所述第一预设值,则将第二预设值与所述第一差值之间的第二差值,确定为所述第j个路段与所述下一相邻路段之间的角度。
6.根据权利要求1所述的方法,其特征在于,所述根据所述K个路段中每个路段对应的轨迹点的运动信息,确定所述K个路段中每个路段的第二重要度,包括:
针对所述K个路段中的第j个路段,若所述第j个路段对应的各轨迹点中至少一个轨迹点的运动信息大于预设阈值,则确定所述第j个路段的第二重要度为第一数值,所述j为从1到K的正整数;
若所述第j个路段对应的各轨迹点的运动信息均小于或等于所述预设阈值,则确定所述第j个路段的第二重要度为第二数值,所述第二数值小于所述第二数值。
7.根据权利要求6所述的方法,其特征在于,所述轨迹点的运动信息包括速度、加速度、方向角、转角中的至少一个。
8.根据权利要求6所述的方法,其特征在于,所述第一数值为1,所述第二数值为0。
9.根据权利要求1-8任一项所述的方法,其特征在于,所述根据所述K个路段中每个路段的第一重要度和第二重要度中的至少一个,确定所述第i条轨迹的关键路段,包括:
将所述K个路段中所述第一重要度大于预设阈值,且所述第二重要度等于第一数值的路段,确定为所述第i条轨迹的关键路段。
10.根据权利要求1-8任一项所述的方法,其特征在于,所述根据所述N条轨迹中每条轨迹的关键路段,确定所述N条轨迹中的异常轨迹,包括:
根据所述N条轨迹中每条轨迹的关键路段,确定所述N条轨迹中每两条轨迹之间的相似度;
将所述N条轨迹中所述相似度大于预设值的轨迹,确定为所述异常轨迹。
11.根据权利要求10所述的方法,其特征在于,所述根据所述N条轨迹中每条轨迹的关键路段,确定所述N条轨迹中每两条轨迹之间的相似度,包括:
针对所述N条轨迹中的第一轨迹和第二轨迹,确定所述第一轨迹的关键路段与所述第二轨迹的关键路段之间的相似度,所述第一轨迹和第二轨道均为所述N条轨迹中的任一轨迹,且所述第一轨迹与所述第二轨迹不同;
将所述第一轨迹的关键路段与所述第二轨迹的关键路段之间的相似度,确定为所述第一轨迹与所述第二轨迹之间的相似度。
12.根据权利要求11所述的方法,其特征在于,所述确定所述第一轨迹的关键路段与所述第二轨迹的关键路段之间的相似度,包括:
确定所述第一轨迹的关键路段与所述第二轨迹的关键路段之间的距离;
根据所述距离,确定所述第一轨迹的关键路段与所述第二轨迹的关键路段之间的相似度。
13.根据权利要求12所述的方法,其特征在于,所述距离为编辑距离、余弦距离、杰卡德距离中的任意一个。
14.根据权利要求1-8任一项所述的方法,其特征在于,所述基于预设时间段内所上报的M个轨迹点,构造N条轨迹,包括:
根据所述预设时间段内所上报的轨迹点所包括的时间信息和标识,将同一个标识下的各轨迹点按照时间顺序进行排列构成一个轨迹,得到所述N条轨迹。
15.根据权利要求1-8任一项所述的方法,其特征在于,所述基于预设时间段内所上报的M个轨迹点,构造N条轨迹之前,所述方法包括:
剔除所述M个轨迹点中的异常轨迹点,得到P个正常轨迹点,所述P为大于1且小于或等于M的正整数;
所述基于预设时间段内所上报的M个轨迹点,构造N条轨迹,包括:
基于所述P个正常轨迹点,构造所述N条轨迹。
16.一种轨迹检测装置,其特征在于,包括:
构造单元,用于基于预设时间段内所上报的M个轨迹点,构造N条轨迹,所述M、N均为大于1的正整数;
路段确定单元,用于确定所述N条轨迹中每条轨迹所匹配的路段;
关键路段确定单元,用于根据所述每条轨迹所匹配的路段的属性信息和所述路段对应的轨迹点的运动信息中的至少一个,确定每条轨迹的关键路段;
异常轨迹确定单元,用于根据所述N条轨迹中每条轨迹的关键路段,确定所述N条轨迹中的异常轨迹;
所述关键路段确定单元,具体用于针对所述N条轨迹中的第i条轨迹,根据所述第i条轨迹所匹配的K个路段中每个路段的属性信息,确定所述K个路段中每个路段的第一重要度,所述i为从1到N的正整数;根据所述K个路段中每个路段对应的轨迹点的运动信息,确定所述K个路段中每个路段的第二重要度;根据所述K个路段中每个路段的第一重要度和第二重要度中的至少一个,确定所述第i条轨迹的关键路段。
17.一种计算设备,其特征在于,包括:存储器,处理器;
所述存储器,用于存储计算机程序;
所述处理器,用于执行所述计算机程序以实现如上述权利要求1至15任一项所述的方法。
18.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如权利要求1至15任一项所述的方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210111008.XA CN114117261B (zh) | 2022-01-29 | 2022-01-29 | 轨迹检测方法、装置、电子设备及存储介质 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210111008.XA CN114117261B (zh) | 2022-01-29 | 2022-01-29 | 轨迹检测方法、装置、电子设备及存储介质 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN114117261A CN114117261A (zh) | 2022-03-01 |
| CN114117261B true CN114117261B (zh) | 2022-04-22 |
Family
ID=80361768
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210111008.XA Active CN114117261B (zh) | 2022-01-29 | 2022-01-29 | 轨迹检测方法、装置、电子设备及存储介质 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN114117261B (zh) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114925049B (zh) * | 2022-05-10 | 2025-04-18 | 青岛海信网络科技股份有限公司 | 一种轨迹校正方法 |
| CN116092037B (zh) * | 2023-02-13 | 2023-07-28 | 长沙理工大学 | 融合轨迹空间-语义特征的车辆类型识别方法 |
| CN118583185B (zh) * | 2024-07-31 | 2024-11-26 | 浙江吉利控股集团有限公司 | 导航路径规划方法、电子设备、存储介质及程序产品 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110379163A (zh) * | 2019-07-26 | 2019-10-25 | 银江股份有限公司 | 一种基于轨迹数据的车辆异常减速区域检测方法及系统 |
| CN110751531A (zh) * | 2018-11-13 | 2020-02-04 | 北京嘀嘀无限科技发展有限公司 | 轨迹识别方法、装置及电子设备 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7912628B2 (en) * | 2006-03-03 | 2011-03-22 | Inrix, Inc. | Determining road traffic conditions using data from multiple data sources |
| US20160260450A1 (en) * | 2015-03-04 | 2016-09-08 | Kabushiki Kaisha Toshiba | Magnetic disk device and control method |
| CN107038168A (zh) * | 2016-02-03 | 2017-08-11 | 中兴通讯股份有限公司 | 一种用户通勤轨迹管理方法、装置及系统 |
| CN108242145B (zh) * | 2016-12-26 | 2020-10-16 | 阿里巴巴(中国)有限公司 | 异常轨迹点检测方法和装置 |
| CN107146386B (zh) * | 2017-05-05 | 2019-12-31 | 广东小天才科技有限公司 | 一种异常行为检测方法及装置、用户设备 |
| CN110471999B (zh) * | 2019-08-05 | 2022-03-18 | 北京百度网讯科技有限公司 | 轨迹处理方法、装置、设备和介质 |
| CN111475544B (zh) * | 2020-03-30 | 2023-06-30 | 智慧航海(青岛)科技有限公司 | 船舶轨迹数据中离群点的检测方法和装置 |
| CN111815946A (zh) * | 2020-04-17 | 2020-10-23 | 北京嘀嘀无限科技发展有限公司 | 一种异常路段的确定方法、装置、存储介质和电子设备 |
| CN111242521B (zh) * | 2020-04-24 | 2020-07-31 | 中国人民解放军国防科技大学 | 轨迹异常检测方法和系统 |
| CN113762043B (zh) * | 2021-04-30 | 2025-07-18 | 腾讯科技(深圳)有限公司 | 异常轨迹识别方法及装置 |
| CN113946546B (zh) * | 2021-12-20 | 2022-05-17 | 阿里云计算有限公司 | 异常检测方法、计算机存储介质及程序产品 |
-
2022
- 2022-01-29 CN CN202210111008.XA patent/CN114117261B/zh active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110751531A (zh) * | 2018-11-13 | 2020-02-04 | 北京嘀嘀无限科技发展有限公司 | 轨迹识别方法、装置及电子设备 |
| CN110379163A (zh) * | 2019-07-26 | 2019-10-25 | 银江股份有限公司 | 一种基于轨迹数据的车辆异常减速区域检测方法及系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN114117261A (zh) | 2022-03-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN114117261B (zh) | 轨迹检测方法、装置、电子设备及存储介质 | |
| US10663305B2 (en) | Map matched aggregation for K-anonymity in trajectory data | |
| US11562168B2 (en) | Clustering for K-anonymity in location trajectory data | |
| US11042648B2 (en) | Quantification of privacy risk in location trajectories | |
| US10546043B1 (en) | Triangulation for K-anonymity in location trajectory data | |
| CN109974718B (zh) | 地图匹配方法、装置、设备和介质 | |
| US9043138B2 (en) | System and method for automated updating of map information | |
| CN111856521B (zh) | 数据处理方法、装置、电子设备和存储介质 | |
| US11421996B2 (en) | Method, apparatus, and system for comparing and assimilating road lane representations using geospatial data and attribute data | |
| CN114234991B (zh) | 导航路径规划方法、装置、计算机设备和存储介质 | |
| CN111737377B (zh) | 一种漂移轨迹的识别方法、装置及计算设备、存储介质 | |
| CN101561494A (zh) | 智能型定位校正系统与方法 | |
| CN110109165B (zh) | 行驶轨迹中异常点的检测方法及装置 | |
| CN110345950B (zh) | 一种道路编码方法及道路匹配方法 | |
| Zhang et al. | Vehicle positioning system with multi‐hypothesis map matching and robust feedback<? show [AQ ID= Q1]?> | |
| CN114216467A (zh) | 道路定位方法、装置、计算机设备和存储介质 | |
| US20150260533A1 (en) | Navigation system with error detection mechanism and method of operation thereof | |
| US20230118627A1 (en) | Processing apparatus and method for determining road names | |
| CN119830906B (zh) | 地理信息词汇的敏感性确定方法和装置 | |
| HK40065988B (zh) | 轨迹检测方法、装置、电子设备及存储介质 | |
| HK40065988A (zh) | 轨迹检测方法、装置、电子设备及存储介质 | |
| CN114490675B (zh) | 一种地图更新方法、相关装置、可读存储介质和系统 | |
| CN111343582B (zh) | 一种防止里程作弊的方法及装置 | |
| CN118585832B (zh) | 车辆轨迹的识别方法、装置、设备、存储介质及程序产品 | |
| CN113869715A (zh) | 站点分组方法、归属站点确定方法、装置和计算机设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| REG | Reference to a national code |
Ref country code: HK Ref legal event code: DE Ref document number: 40065988 Country of ref document: HK |