CN113739683A - Zero calibration device, striker with zero calibration device, zero calibration method and striking method - Google Patents
Zero calibration device, striker with zero calibration device, zero calibration method and striking method Download PDFInfo
- Publication number
- CN113739683A CN113739683A CN202111310674.8A CN202111310674A CN113739683A CN 113739683 A CN113739683 A CN 113739683A CN 202111310674 A CN202111310674 A CN 202111310674A CN 113739683 A CN113739683 A CN 113739683A
- Authority
- CN
- China
- Prior art keywords
- conductor
- striking
- lever
- contact
- zero calibration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/003—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring position, not involving coordinate determination
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61D—VETERINARY INSTRUMENTS, IMPLEMENTS, TOOLS, OR METHODS
- A61D1/00—Surgical instruments for veterinary use
Landscapes
- Health & Medical Sciences (AREA)
- Veterinary Medicine (AREA)
- Life Sciences & Earth Sciences (AREA)
- Zoology (AREA)
- Engineering & Computer Science (AREA)
- Wood Science & Technology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Catching Or Destruction (AREA)
Abstract
本发明提供一种校零装置,包括:支架;通过旋转轴与支架连接的杠杆;设置于杠杆的第二端的触头;设置于杠杆的第一端的第一导体;以及固定于支架、与支架绝缘的第二导体;支架和第二导体分别与电源连接,当触头到达打击位置受力时,第一导体和第二导体断开连接。本发明在支架上设置杠杆,杠杆的一端设置用于接触打击位置的触头,杠杆的另一端设置与触头形成杠杆平衡的第一导体,第一导体与支架上的第二导体接触,构成支架、杠杆、第一导体、第二导体和电源的电回路,当触头到达打击位置受力时,通过电路通断和杠杆力学相结合的方式定位打击位置,避免了打击位置覆盖有组织液时校零不准的问题,保证建立动物损伤模型的准确性。
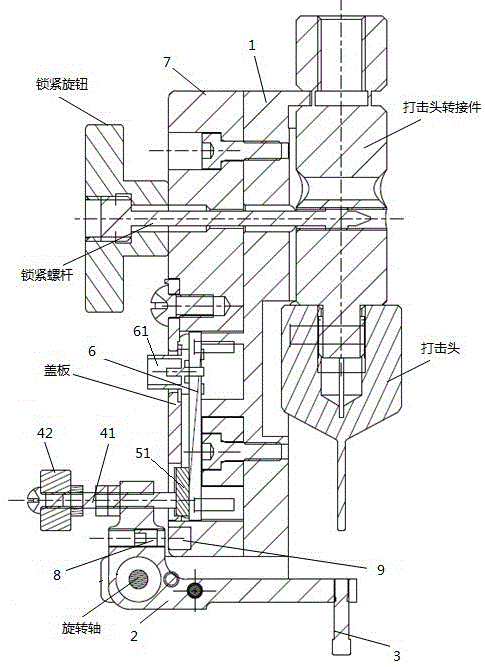
The invention provides a zero calibration device, comprising: a bracket; a lever connected with the bracket through a rotating shaft; a contact arranged at the second end of the lever; a first conductor arranged at the first end of the lever; The second conductor insulated by the bracket; the bracket and the second conductor are respectively connected with the power supply, and when the contact reaches the striking position and is stressed, the first conductor and the second conductor are disconnected. In the present invention, a lever is arranged on the bracket, one end of the lever is arranged with a contact for contacting the striking position, the other end of the lever is arranged with a first conductor that forms a lever balance with the contact, and the first conductor is in contact with the second conductor on the bracket. The electrical circuit of the bracket, lever, first conductor, second conductor and power supply, when the contact reaches the striking position and is stressed, the striking position is positioned by the combination of circuit on-off and lever mechanics, avoiding the situation when the striking position is covered with tissue fluid The problem of inaccurate calibration ensures the accuracy of establishing animal injury models.
Description
Claims (10)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111310674.8A CN113739683B (en) | 2021-11-08 | 2021-11-08 | Zero calibration device and striker having the same, zero calibration method and strike method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111310674.8A CN113739683B (en) | 2021-11-08 | 2021-11-08 | Zero calibration device and striker having the same, zero calibration method and strike method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN113739683A true CN113739683A (en) | 2021-12-03 |
| CN113739683B CN113739683B (en) | 2022-03-15 |
Family
ID=78727700
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202111310674.8A Active CN113739683B (en) | 2021-11-08 | 2021-11-08 | Zero calibration device and striker having the same, zero calibration method and strike method |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113739683B (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| IT202300001932A1 (en) | 2023-02-07 | 2024-08-07 | Sissa Scuola Int Superiore Di Studi Avanzati | DEVICE FOR MECHANICALLY STIMULATING BIOLOGICAL MATERIAL AND RELATED PROCEDURE |
Citations (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB650953A (en) * | 1947-11-12 | 1951-03-07 | William Frederick Toynbee | Apparatus for determining the thickness of hair |
| US5888247A (en) * | 1995-04-10 | 1999-03-30 | Cardiothoracic Systems, Inc | Method for coronary artery bypass |
| DE20017949U1 (en) * | 2000-10-20 | 2001-11-22 | jojumarie Intelligente Instrumente GmbH, 13125 Berlin | Device for linear and / or rotational guidance of an object such as a probe and instrument guidance |
| JP2002355261A (en) * | 2001-05-31 | 2002-12-10 | Morita Mfg Co Ltd | Medical arm support device |
| CN1967759A (en) * | 2005-11-18 | 2007-05-23 | 比亚迪股份有限公司 | Induction system for breaking circuit by bump |
| CN101185589A (en) * | 2007-12-04 | 2008-05-28 | 中山大学 | A new electronically controlled multi-purpose spinal cord percussion device |
| CN201153990Y (en) * | 2007-12-04 | 2008-11-26 | 中山大学 | A new electronically controlled multi-purpose spinal cord percussion device |
| CN101375810A (en) * | 2008-09-17 | 2009-03-04 | 北京航空航天大学 | Device for causing injury of laboratory animal |
| CN201219932Y (en) * | 2008-06-16 | 2009-04-15 | 李林合 | Rack for preparing animal spinal cord damage model |
| CN201328880Y (en) * | 2008-11-17 | 2009-10-21 | 徐帆 | Simple model preparer for animals with spinal cord injuries |
| CN101779987A (en) * | 2010-03-16 | 2010-07-21 | 胡建中 | Acute spinal cord injury animal model modeling impactor |
| CN105853012A (en) * | 2016-05-10 | 2016-08-17 | 福建中医药大学 | Spinal cord injury impactor precise in positioning and adjustable in strike force |
| CN207055567U (en) * | 2017-12-27 | 2018-03-02 | 中国人民解放军陆军军医大学第一附属医院 | Cause minitype animal experiment brainpan damage percussion device |
| CN207487544U (en) * | 2017-12-07 | 2018-06-12 | 华中科技大学 | Magnetic suspension contact pilotage displacement sensor |
| CN209019028U (en) * | 2018-08-27 | 2019-06-25 | 李宽新 | Make the percussion device of animal model with spinal cord damnification |
| CN209091699U (en) * | 2018-07-14 | 2019-07-12 | 肯维捷斯(武汉)科技有限公司 | A kind of toy spinal cord impact damage modeling impactor |
| CN112891009A (en) * | 2021-03-02 | 2021-06-04 | 西安市红会医院 | Fine-adjustment type spinal cord injury animal model making device |
-
2021
- 2021-11-08 CN CN202111310674.8A patent/CN113739683B/en active Active
Patent Citations (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB650953A (en) * | 1947-11-12 | 1951-03-07 | William Frederick Toynbee | Apparatus for determining the thickness of hair |
| US5888247A (en) * | 1995-04-10 | 1999-03-30 | Cardiothoracic Systems, Inc | Method for coronary artery bypass |
| DE20017949U1 (en) * | 2000-10-20 | 2001-11-22 | jojumarie Intelligente Instrumente GmbH, 13125 Berlin | Device for linear and / or rotational guidance of an object such as a probe and instrument guidance |
| JP2002355261A (en) * | 2001-05-31 | 2002-12-10 | Morita Mfg Co Ltd | Medical arm support device |
| CN1967759A (en) * | 2005-11-18 | 2007-05-23 | 比亚迪股份有限公司 | Induction system for breaking circuit by bump |
| CN101185589A (en) * | 2007-12-04 | 2008-05-28 | 中山大学 | A new electronically controlled multi-purpose spinal cord percussion device |
| CN201153990Y (en) * | 2007-12-04 | 2008-11-26 | 中山大学 | A new electronically controlled multi-purpose spinal cord percussion device |
| CN201219932Y (en) * | 2008-06-16 | 2009-04-15 | 李林合 | Rack for preparing animal spinal cord damage model |
| CN101375810A (en) * | 2008-09-17 | 2009-03-04 | 北京航空航天大学 | Device for causing injury of laboratory animal |
| CN201328880Y (en) * | 2008-11-17 | 2009-10-21 | 徐帆 | Simple model preparer for animals with spinal cord injuries |
| CN101779987A (en) * | 2010-03-16 | 2010-07-21 | 胡建中 | Acute spinal cord injury animal model modeling impactor |
| CN105853012A (en) * | 2016-05-10 | 2016-08-17 | 福建中医药大学 | Spinal cord injury impactor precise in positioning and adjustable in strike force |
| CN207487544U (en) * | 2017-12-07 | 2018-06-12 | 华中科技大学 | Magnetic suspension contact pilotage displacement sensor |
| CN207055567U (en) * | 2017-12-27 | 2018-03-02 | 中国人民解放军陆军军医大学第一附属医院 | Cause minitype animal experiment brainpan damage percussion device |
| CN209091699U (en) * | 2018-07-14 | 2019-07-12 | 肯维捷斯(武汉)科技有限公司 | A kind of toy spinal cord impact damage modeling impactor |
| CN209019028U (en) * | 2018-08-27 | 2019-06-25 | 李宽新 | Make the percussion device of animal model with spinal cord damnification |
| CN112891009A (en) * | 2021-03-02 | 2021-06-04 | 西安市红会医院 | Fine-adjustment type spinal cord injury animal model making device |
Non-Patent Citations (2)
| Title |
|---|
| EDUARDO MARTIN MORAUD等: "Closed-loop control of trunk posture improves locomotion through the regulation of leg proprioceptive feedback after spinal cord injury", 《SCIENTIFIC REPORTS》 * |
| 双卫兵等: "自制脊髓损伤动物模型实验台的结构与使用", 《实用医技杂志》 * |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| IT202300001932A1 (en) | 2023-02-07 | 2024-08-07 | Sissa Scuola Int Superiore Di Studi Avanzati | DEVICE FOR MECHANICALLY STIMULATING BIOLOGICAL MATERIAL AND RELATED PROCEDURE |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113739683B (en) | 2022-03-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN113739683B (en) | Zero calibration device and striker having the same, zero calibration method and strike method | |
| US4193293A (en) | Apparatus for determining blood elasticity parameters | |
| EP3262434B1 (en) | Vibration inducing apparatus for magnetic resonance elastography | |
| CN219996152U (en) | A detection platform | |
| US2122556A (en) | Vibratory massager | |
| CN103919627A (en) | Randomly-inserted corrector used on stereotaxic apparatus | |
| KR20110104392A (en) | Signal transmission characteristic measuring device of fine pitch transmission line | |
| CN114347213B (en) | An adjustable vibrator with stable extraction function | |
| CN118712962A (en) | A wire harness stripping device capable of cutting to a fixed length | |
| CN213813921U (en) | Magnetostrictive micro deformation measurement experimental device | |
| US1175360A (en) | Massage apparatus. | |
| Kanabus et al. | Excursion of vibrating microelectrodes in tissue | |
| CN104546210B (en) | A kind of animal used as test brain solid fixing device used under microscope | |
| JP2000080545A (en) | Device for adjusting distance between trick plates in double raschel loom | |
| CN214623174U (en) | Operating microscope lens angle adjusting device | |
| CN222549840U (en) | An electronically controlled infusion stand for neurosurgery | |
| CN220016620U (en) | An instrument mounting bracket | |
| JP2733216B2 (en) | Non-magnetic near reaction measurement method and apparatus | |
| CN119635791A (en) | A stress relief device for special ceramic materials | |
| CN222398781U (en) | A conveniently adjustable medical imaging device fixing bracket | |
| CN221686818U (en) | Remote debugging stand display device of photoetching machine | |
| CN221830736U (en) | Spinal puncture outfit | |
| CN223307777U (en) | A vibration platform for polyethylene barrel experiments | |
| TW202033244A (en) | Apparatus for measuring the flexibility of a golf club head | |
| CN223564973U (en) | Round steel verticality detection device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CP03 | Change of name, title or address | ||
| CP03 | Change of name, title or address |
Address after: 518057, Room 1901, Building A, Building 7, Shenzhen International Innovation Valley, Dashi Road, Xili Community, Xili Street, Nanshan District, Shenzhen City, Guangdong Province (9th, 19th, 20th, and 9th floors of Building A) Patentee after: Shenzhen Ruiwode Life Technology Co.,Ltd. Country or region after: China Address before: 518057 room 1901, block a, building 9, area C, Wanke Yuncheng phase III, Liuxin 4th Road, Xili community, Xili street, Nanshan District, Shenzhen City, Guangdong Province Patentee before: RWD LIFE SCIENCE Co.,Ltd. Country or region before: China |
|
| PE01 | Entry into force of the registration of the contract for pledge of patent right | ||
| PE01 | Entry into force of the registration of the contract for pledge of patent right |
Denomination of invention: Zeroing device and striker with it, zeroing method, striking method Granted publication date: 20220315 Pledgee: China Construction Bank Co.,Ltd. Shenzhen Branch Pledgor: Shenzhen Ruiwode Life Technology Co.,Ltd. Registration number: Y2025980044048 |