CN113155145B - A lane-level path planning method for lane-level navigation of autonomous driving - Google Patents
A lane-level path planning method for lane-level navigation of autonomous driving Download PDFInfo
- Publication number
- CN113155145B CN113155145B CN202110417450.0A CN202110417450A CN113155145B CN 113155145 B CN113155145 B CN 113155145B CN 202110417450 A CN202110417450 A CN 202110417450A CN 113155145 B CN113155145 B CN 113155145B
- Authority
- CN
- China
- Prior art keywords
- lane
- road
- intersection
- level
- crossing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3407—Route searching; Route guidance specially adapted for specific applications
- G01C21/3415—Dynamic re-routing, e.g. recalculating the route when the user deviates from calculated route or after detecting real-time traffic data or accidents
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3446—Details of route searching algorithms, e.g. Dijkstra, A*, arc-flags or using precalculated routes
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Traffic Control Systems (AREA)
- Navigation (AREA)
Abstract
本发明涉及自动驾驶导航,电子地图领域,具体的说涉及一种面向自动驾驶车道级导航的车道级路径规划方法。包括:步骤一、建立面向自动驾驶导航的车道级路网模型,模型形式简洁直观方便规划;步骤二、基于步骤一建立的车道级路网模型进行基于道路—车道组—车道的分层双向车道级路径规划。本发明能使车辆快速准确地规划出从起点到终点的最优车道序列即车辆从起点到终点依次要行驶的车道,有效地服务于自动驾驶导航系统。
The invention relates to the fields of automatic driving navigation and electronic maps, in particular to a lane-level path planning method for automatic driving lane-level navigation. Including: Step 1. Establish a lane-level road network model for automatic driving navigation. The model form is simple, intuitive and convenient for planning; Step 2. Based on the lane-level road network model established in Step 1, perform hierarchical two-way lanes based on road-lane group-lane Level path planning. The invention enables the vehicle to quickly and accurately plan the optimal lane sequence from the starting point to the ending point, that is, the lanes that the vehicle will drive sequentially from the starting point to the ending point, and effectively serves the automatic driving navigation system.
Description
技术领域technical field
本发明涉及自动驾驶导航,电子地图领域,具体的说涉及一种面向自动驾驶车道级导航的车道级路径规划方法。The invention relates to the fields of automatic driving navigation and electronic maps, in particular to a lane-level path planning method for automatic driving lane-level navigation.
背景技术Background technique
越来越多的驾驶员依靠车辆或手机上的数字地图导航系统来选择最佳行驶路线,以节省时间和提高安全性。目前,大多数车辆导航系统基于道路级别的地图,信息有限且精度较低。近年来,先进的驾驶员辅助系统和自动驾驶技术的发展需要来自数字地图的越来越多的帮助。在不久的将来,数字地图导航系统将在交通运输系统中发挥越来越重要的作用。为了将现有的导航系统扩展到更多的应用中,必须解决两个基本问题:车道级地图模型和车道级路径规划。许多基于数字地图的智能驾驶功能已经开发出来。这些地图支持的智能驾驶功能可以进一步分为以下两类:More and more drivers rely on digital map navigation systems in vehicles or mobile phones to choose the best driving route to save time and improve safety. Currently, most vehicle navigation systems are based on road-level maps with limited information and low accuracy. In recent years, the development of advanced driver assistance systems and autonomous driving technology requires more and more help from digital maps. In the near future, the digital map navigation system will play an increasingly important role in the transportation system. In order to extend existing navigation systems to more applications, two fundamental problems must be solved: lane-level map models and lane-level path planning. Many smart driving functions based on digital maps have been developed. The intelligent driving functions supported by these maps can be further divided into the following two categories:
1、道路级别的功能:这些功能通常是为辅助人类驾驶员而设计的,所需的精度通常约为10米,它们所需的信息存储在道路级地图中,忽略了车道的细节。1. Road-level functions: These functions are usually designed to assist human drivers, the required accuracy is usually about 10 meters, and the information they need is stored in the road-level map, ignoring the details of the lane.
2、车道级别的功能:这些功能可以从数字地图中获取车道级别的交通环境细节,从而提高车辆的智能水平。当地图精确到车道级别时,导航系统可以提供更精确的驾驶辅助。2. Lane-level functions: These functions can obtain lane-level traffic environment details from digital maps, thereby improving the intelligence level of vehicles. When the map is accurate down to the lane level, the navigation system can provide more precise driving assistance.
为了更好地支持自动驾驶系统,设计基于车道级地图的车道级路径规划系统是必要的。传统导航系统的目标应用是人类驾驶员,他们负责实时选择轨迹。然而,当目标用户是一辆自动驾驶汽车时,导航系统必须提供更详细的指导,帮助车辆完成驾驶任务。现有成熟的导航是在道路级别规划的路线,缺少精确到车道级的路径规划,更像是一系列驾驶任务指令,而不是自动驾驶汽车可以遵循的特定轨迹。这样的指导对人类驾驶员来说已经足够精确了。然而,为了实现自动驾驶,有必要更多地了解车辆应该继续直线行驶或转弯的确切位置 (即明确车辆所在的车道,例如,车辆在前方路口左转的时候,传统道路级导航不能明确规划车辆进入到左转车道,只是告诉驾驶员需要左转的指令,而车道级路径规划则明确了车辆必须进入的左转车道,使得全局路径规划的路线精确到车道级别,大大降低负载运算负担,提高整个自动驾驶系统稳定性)。传统导航支持的自动驾驶汽车必须配备强大的实时感知和决策系统,这大大增加了车载计算负担。相比之下,车道级导航能够提供一个参考车道,在没有其他车辆或障碍物的情况下,自动驾驶汽车可以沿着规划出的车道行驶。车道级别的导航和道路级别的导航的关键区别在于前者能够提供精确的车道作为控制输入,而不需要环境感知系统的帮助。车道级导航系统虽然不能代替实时感知和决策系统,但可以大大减轻其计算负担,降低系统故障风险。In order to better support the automatic driving system, it is necessary to design a lane-level path planning system based on the lane-level map. The target application of traditional navigation systems is the human driver, who is responsible for selecting the trajectory in real time. However, when the target user is a self-driving car, the navigation system must provide more detailed guidance to help the vehicle complete the driving task. The existing mature navigation is a route planned at the road level, lacking accurate path planning at the lane level, and is more like a series of driving task instructions rather than a specific trajectory that an autonomous vehicle can follow. Such guidance is precise enough for human drivers. However, in order to achieve autonomous driving, it is necessary to know more about the exact location where the vehicle should continue to drive straight or turn (i.e. to know the lane the vehicle is in, for example, when the vehicle is turning left at the intersection ahead, traditional road-level navigation cannot clearly plan the vehicle Entering the left-turn lane only tells the driver the instruction to turn left, while the lane-level path planning specifies the left-turn lane that the vehicle must enter, making the route of the global path planning accurate to the lane level, greatly reducing the load calculation burden and improving stability of the entire autopilot system). Autonomous vehicles supported by traditional navigation must be equipped with powerful real-time perception and decision-making systems, which greatly increases the burden of on-board computing. In contrast, lane-level navigation provides a reference lane along which a self-driving car can drive in the absence of other vehicles or obstacles. The key difference between lane-level navigation and road-level navigation is that the former can provide precise lanes as control inputs without the help of a situational awareness system. Although the lane-level navigation system cannot replace the real-time perception and decision-making system, it can greatly reduce its computational burden and reduce the risk of system failure.
对于面向车道级导航的车道级路径规划方法,过去的方法以车道为单元进行搜索,而在路网较大的情况下车道数目较多,车道之间的连接关系复杂,搜索效率低下,很难满足车辆运行的实时性要求。For the lane-level path planning method for lane-level navigation, the previous method used the lane as a unit to search, but in the case of a large road network, there are many lanes, the connection relationship between lanes is complicated, and the search efficiency is low. Meet the real-time requirements of vehicle operation.
发明内容Contents of the invention
本发明提供了一种面向自动驾驶车道级导航的车道级路径规划方法,能使车辆快速准确的规划出从起点到终点的最优车道序列即车辆从起点到终点依次要行驶的车道,有效地服务于自动驾驶导航系统。The present invention provides a lane-level path planning method for lane-level navigation of automatic driving, which enables the vehicle to quickly and accurately plan the optimal lane sequence from the start point to the end point, that is, the lanes that the vehicle will drive sequentially from the start point to the end point, effectively Serving the automatic driving navigation system.
本发明技术方案结合附图说明如下:The technical scheme of the present invention is described as follows in conjunction with accompanying drawing:
一种面向自动驾驶车道级导航的车道级路径规划方法,包括以下步骤:A lane-level path planning method for lane-level navigation of automatic driving, comprising the following steps:
步骤一、建立面向自动驾驶导航的车道级路网模型,为后续车道级规划服务;
步骤二、针对步骤一中面向自动驾驶导航建立的车道级路网模型,进行基于道路—车道组—车道的分层双向车道级路径规划。
所述步骤一的具体方法如下:The concrete method of described step one is as follows:
G=(R,I) (1)G=(R,I) (1)
其中,G为整个路网;R为道路集合

r为由一个或多个车道组组成的道路,而车道组则由行驶方向相同的车道组成;r表示如下:r is a road composed of one or more lane groups, and a lane group is composed of lanes with the same driving direction; r is expressed as follows:
r=(LG,qr,f,b) (2)r=(LG,q r ,f,b) (2)
其中,LG是车道组集合

其中,
l=(lg,seq,pre,suc,p,q) (4)l=(lg, seq, pre, suc, p, q) (4)
其中,lg是该车道所属的车道组;seq是lg中该车道的序列号,从靠近道路中心线的一侧开始,序列号从1开始顺序增加;pre是与车道起点相连的由ipre表示的路口或由lpre表示的车道;suc为与车道末尾连接的由isuc表示的路口或由lsuc表示的车道;p包含代表车道的离散点集,包括描述几何形状和反映车道属性变化的点;q包含与车道相对应的属性,包括车道的宽度,长度,速度限制,拥堵程度,左右车道线类型;Among them, lg is the lane group to which the lane belongs; seq is the serial number of the lane in lg, starting from the side close to the centerline of the road, the serial number increases sequentially from 1; pre is connected to the starting point of the lane, represented by i pre The intersection or the lane represented by l pre ; suc is the intersection represented by i suc or the lane represented by l suc connected to the end of the lane; p contains the discrete point set representing the lane, including describing the geometric shape and reflecting the change of lane attributes point; q contains attributes corresponding to lanes, including lane width, length, speed limit, congestion level, left and right lane line types;
路口i定义为:Intersection i is defined as:
i=(VL,sig) (5)i=(VL,sig) (5)
其中,VL为虚拟车道的集合
vl=(lf,lr,rf,rb,w,pvl) (6)vl=(l f ,l r ,r f ,r b ,w,p vl ) (6)
其中,lf,lr分别为进入和离开交叉路口的车道;rf,rb分别为进入和离开交叉路口的道路;w为通过的方式,包括直行,左转,右转,掉头;pvl为描述虚拟车道形状的离散点集。Among them, l f , l r are the lanes entering and leaving the intersection; r f , r b are the roads entering and leaving the intersection respectively; w is the way of passing, including going straight, turning left, turning right, and turning around; p vl is a set of discrete points describing the shape of the virtual lane.
所述步骤二的具体方法如下:The concrete method of described
21)在道路层进行路径规划;21) Path planning is performed at the road layer;
用于路径规划的有向图GR表示为:The directed graph G R for path planning is expressed as:
GR=(VR,ER) (7)G R =(V R , E R ) (7)
其中,VR为GR中顶点的集合;ER是GR边的集合,边描述了顶点之间的连接关系(包含哪个顶点与哪个顶点相连,顶点之间边的属性);在道路层进行路径规划时,将路口作为节点,路口之间的道路作为边,利用公式(1)—(6) 得出(7)描述的有向图。Among them, V R is the collection of vertices in G R ; E R is the collection of G R edges, and the edges describe the connection relationship between vertices (including which vertex is connected to which vertex, and the attributes of the edges between vertices); in the road layer In path planning, intersections are taken as nodes, roads between intersections are taken as edges, and the directed graph described in (7) is obtained by using formulas (1)-(6).
当在GR中给出起点O和终点D时,使用A*算法,则获得由一系列道路交叉口组成的结果VR,用以下等式表示:When the starting point O and the ending point D are given in G R , using the A* algorithm, the result V R consisting of a series of road intersections is obtained, expressed by the following equation:
VR=(O,i1,…,ik…,in,D) (8)V R =(O,i 1 ,...,i k ...,i n ,D) (8)
其中,i1,ik,in分别是在道路层路线确定后获得的一系列路口中的第1个,第k个和最后1个路口,n是节点数(即路口数);Among them, i 1 , i k , i n are respectively the first, kth and last intersections in a series of intersections obtained after the road layer route is determined, and n is the number of nodes (that is, the number of intersections);
一系列交叉点之间的道路表示为:A road between a series of intersections is represented as:
ER=(r0,r1,…,rk…,rn) (9)E R =(r 0 ,r 1 ,…,r k …,r n ) (9)
其中,r0为点O所在的道路;rn是点D所在的道路;r1是第1个路口i1和第2 个路口i2之间的道路;rk是路口ik和ik+1之间的道路;Among them, r 0 is the road where point O is located; r n is the road where point D is located; r 1 is the road between the first intersection i 1 and the second intersection i 2 ; r k is the intersection i k and i k Roads between +1 ;
22)在车道组层进行路径规划;22) Carry out path planning at the lane group layer;
车道组级别的路径规划使用车道组和道路之间的对应关系,将道路级别的规划结果细化为基于车道组的结果;Path planning at the lane group level uses the correspondence between lane groups and roads to refine the planning results at the road level into lane group-based results;
根据式(3)中的is_equal属性,获取与集合ER中的道路的行驶方向一致的一组车道组如下式所示:According to the is_equal attribute in formula (3), obtain a set of lane groups consistent with the driving direction of the road in the set E R as shown in the following formula:
Vlg=(lgO-1,…,lg(k-1)-k,…,lgn-D) (10)V lg =(lg O-1 ,…,lg (k-1)-k ,…,lg nD ) (10)
其中,lgO-1为起点O与第一个路口之间的车道组;lgn-D为第n个路口与目的地D之间的车道组;lg(k-1)-k为第(k-1)个路口与第k个路口之间的车道组, k=2,3,…,n;Among them, lg O-1 is the lane group between the starting point O and the first intersection; lg nD is the lane group between the nth intersection and the destination D; lg (k-1)-k is the (k- 1) the lane group between the intersection and the kth intersection, k=2,3,...,n;
23)在车道层进行路径规划;23) Path planning is performed at the lane level;
根据等式(3)和车道组层的路径规划结果,确定要选择的车道层节点;According to the path planning result of equation (3) and lane group layer, determine the lane layer node to be selected;
车道层节点的确定是在确定的一组车道组Vlg=(lgO-1,…,lg(k-1)-k,… ,lgn-D)中根据车道级代价找到最佳的车道层节点,分别从起点和终点开始进行双向搜索,在每一个车道组中找到代价最小的节点;The determination of the lane layer node is to find the best lane layer node according to the lane-level cost in the determined group of lanes V lg = (lg O-1 ,...,lg (k-1)-k ,... ,lg nD ) , start a two-way search from the starting point and the end point respectively, and find the node with the least cost in each lane group;
将节点从起点到终点顺序组合形成规划出的车道级路径如下所示:Combine the nodes sequentially from the start point to the end point to form the planned lane-level path as follows:
Vl=(lo-1,…,l(k-1)-k,…,ln-D) (11)V l =(l o-1 ,…,l (k-1)-k ,…,l nD ) (11)
其中,lO-1为起点O与第一个路口之间的车道;ln-D为第n个路口与目的地 D之间的车道;l(k-1)-k为第(k-1)个路口与第k个路口之间的车道,k=2,3,…,n。Among them, l O-1 is the lane between the starting point O and the first intersection; l nD is the lane between the nth intersection and the destination D; l (k-1)-k is the (k-1)th The lane between the intersection and the kth intersection, k=2,3,...,n.
所述步骤22)中双向搜索的具体方法如下:The concrete method of two-way search in described step 22) is as follows:
221)从起点开始正向搜索,并且同步从终点开始反向搜索,每一步均搜索一个车道组,根据公式(4)中包含对应车道属性信息的q,利用车道长度,限速信息,拥堵程度生成各个车道的代价,选取代价最低的车道作为目标车道;第1步,正向搜索确定起点O与第一个路口之间的最优车道,反向搜索确定第n 个路口与目的地D之间的最优车道;从第k(k>1)步开始,正向搜索确定了第k-1 个路口与第k个路口之间的最优车道,反向搜索确定了第n-k+1个路口与第 n-k+2个路口之间的最优车道;221) Start forward search from the starting point, and synchronize reverse search from the end point, each step searches for a lane group, according to the q that contains the corresponding lane attribute information in formula (4), using the lane length, speed limit information, and congestion level Generate the cost of each lane, and select the lane with the lowest cost as the target lane;
222)当n为奇数时,当正向搜索确定路口






223)当n为偶数的时候,对于路口



本发明的有益效果为:The beneficial effects of the present invention are:
本发明包含一种面向自动驾驶车道级导航的车道级路网模型及针对模型提出的车道级路径规划方法,能够快速准确地规划车辆从起点到终点的车道级别的路径,有效地服务于自动驾驶车道级导航。The present invention includes a lane-level road network model for lane-level navigation of automatic driving and a lane-level path planning method proposed for the model, which can quickly and accurately plan the lane-level path of a vehicle from the starting point to the end point, and effectively serve the automatic driving Lane level navigation.
附图说明Description of drawings
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。In order to illustrate the technical solutions of the embodiments of the present invention more clearly, the accompanying drawings used in the embodiments will be briefly introduced below. It should be understood that the following drawings only show some embodiments of the present invention, and thus It should be regarded as a limitation on the scope, and those skilled in the art can also obtain other related drawings based on these drawings without creative work.
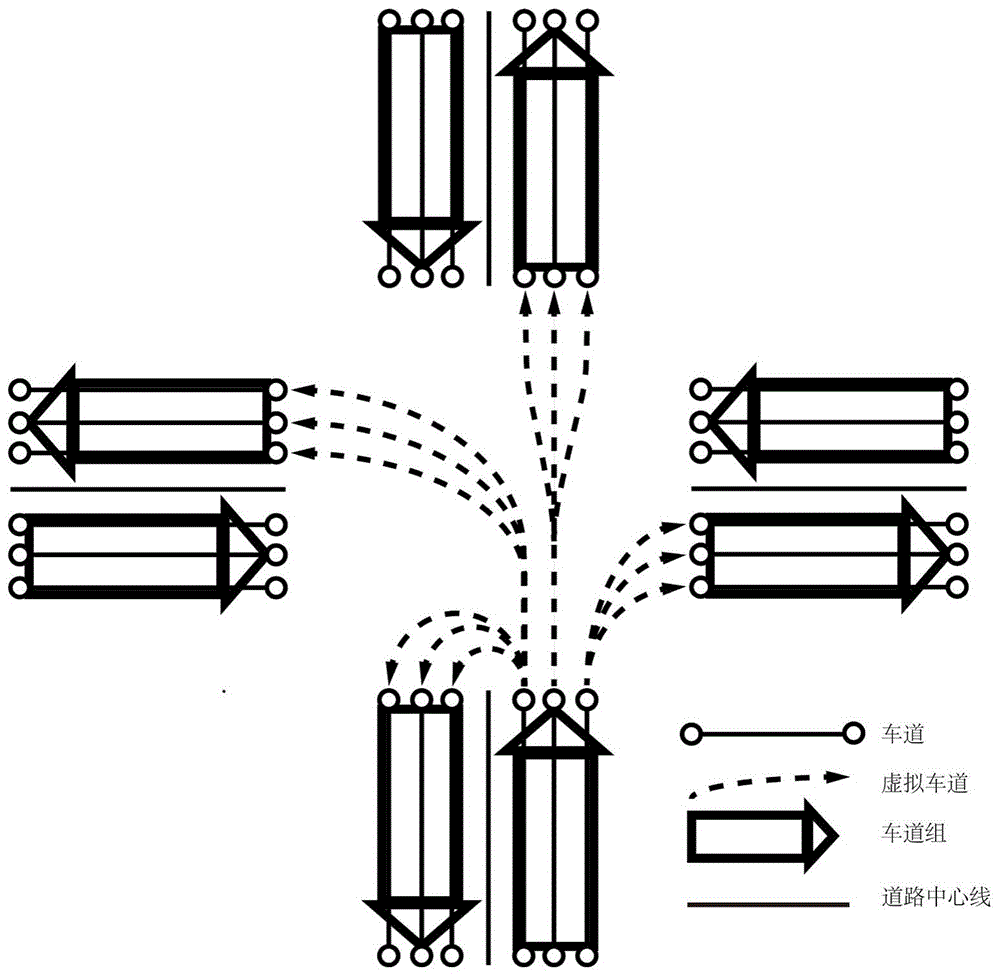
图1为车道级路网模型示意图;Figure 1 is a schematic diagram of a lane-level road network model;
图2为车道级规划系统框图;Fig. 2 is a block diagram of the lane-level planning system;
图3为建立的测试路网示意图;Figure 3 is a schematic diagram of the established test road network;
图4为规划出的路径在路网中的展示图。FIG. 4 is a display diagram of the planned path in the road network.
具体实施方式Detailed ways
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
下面结合附图和实施例对本发明作进一步的详细说明。The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
步骤一、首先建立一种面向自动驾驶导航的车道级路网模型;
在本发明中,将同一道路中相同方向上的车道集合定义为一个车道组,本发明建立的模型涉及道路,车道组,以及车道的关系,为了便于理解三者关系,首先以附图1为例进行说明:图中描述了一个四条道路汇入的十字路口,每条道路中间的直线表示道路中心线,道路中心线左右两侧的三根线分别表示三个车道,箭头表示车道的行驶方向,可以看出每条道路的车道总共有两个不同的行驶方向,其中相同行驶方向的车道位于道路中心线同一侧,也就是说,每条道路有两个车道组分别位于中心线两侧,每个车道组有三条车道。同时在路口,有多条用虚线表示的虚拟车道,它们连接进入路口的车道和离开路口的车道,表达它们的连接关系。In the present invention, the set of lanes on the same road in the same direction is defined as a lane group. The model established by the present invention involves the relationship between roads, lane groups, and lanes. Example to illustrate: the figure depicts a crossroad where four roads converge, the straight line in the middle of each road represents the road centerline, the three lines on the left and right sides of the road centerline represent three lanes respectively, and the arrows represent the driving direction of the lanes. It can be seen that the lanes of each road have two different driving directions in total, and the lanes with the same driving direction are located on the same side of the road centerline, that is to say, each road has two lane groups located on both sides of the centerline, each A lane group has three lanes. At the same time, at the intersection, there are multiple virtual lanes represented by dotted lines, which connect the lanes entering the intersection and the lanes leaving the intersection to express their connection relationship.
建立一种面向自动驾驶车道级导航的车道级路网模型,该模型形式简洁直观,能够利用模型进行高效率的车道级路径规划。具体如下:A lane-level road network model for autonomous driving lane-level navigation is established. The model is simple and intuitive, and can be used for efficient lane-level path planning. details as follows:
G=(R,I) (1)G = (R, I) (1)
其中,G为整个路网;R为道路集合
r=(LG,qr,f,b) (2)r = (LG, q r , f, b) (2)
其中,LG是车道组集合

其中,
l=(lg,seq,pre,suc,p,q) (4)l=(lg, seq, pre, suc, p, q) (4)
其中,lg是该车道所属的车道组;seq是lg中该车道的序列号,从靠近道路中心线的一侧开始,序列号从1开始顺序增加;pre是与车道起点相连的由ipre表示的路口或由lpre表示的车道;suc为与车道末尾连接的由isuc表示的路口或由lsuc表示的车道;p包含代表车道的离散点集,包括描述几何形状和反映车道属性变化的点;q包含与车道相对应的属性,包括车道的宽度,长度,速度限制,拥堵程度,左右车道线类型;Among them, lg is the lane group to which the lane belongs; seq is the serial number of the lane in lg, starting from the side close to the centerline of the road, the serial number increases sequentially from 1; pre is connected to the starting point of the lane, represented by i pre The intersection or the lane represented by l pre ; suc is the intersection represented by i suc or the lane represented by l suc connected to the end of the lane; p contains the discrete point set representing the lane, including describing the geometric shape and reflecting the change of lane attributes point; q contains attributes corresponding to lanes, including lane width, length, speed limit, congestion level, left and right lane line types;
路口i定义为:Intersection i is defined as:
i=(VL,sig) (5)i=(VL,sig) (5)
其中,VL为虚拟车道的集合
vl=(lf,lr,rf,rb,w,pvl) (6)vl=(l f ,l r ,r f ,r b ,w,p vl ) (6)
其中,lf和lr分别为进入和离开交叉路口的车道;rf,rb分别为进入和离开交叉路口的道路;w为通过的方式,包括直行,左转,右转,掉头等;pvl为描述虚拟车道形状的离散点集。Among them, l f and l r are the lanes entering and leaving the intersection respectively; r f and r b are the roads entering and leaving the intersection respectively; w is the way of passing, including going straight, turning left, turning right, turning around, etc.; p vl is a set of discrete points describing the shape of the virtual lane.
步骤二、基于步骤一建立的车道级路网模型,进行基于道路—车道组—车道的分层双向车道级路径规划;
该方法可以利用在道路网络上开发的成熟的导航技术来实现快速有效的路径规划。通过道路,车道组和车道之间的对应关系,可以加快车道级别的路径规划,从而降低直接车道级路径规划的复杂性。The method can leverage mature navigation techniques developed on road networks for fast and efficient path planning. Through the correspondence between roads, lane groups, and lanes, lane-level path planning can be accelerated, thereby reducing the complexity of direct lane-level path planning.
参阅图2,在步骤一建立的车道级路网模型的基础上,所述步骤二的具体方法如下:Referring to Fig. 2, on the basis of the lane-level road network model established in
21)在道路层进行路径规划;21) Path planning is performed at the road layer;
当进行在道路层面的远距离规划时,此时路口的代价影响比较小,可以忽略路口代价将路口视为节点,道路作为有向图的边。When performing long-distance planning at the road level, the cost of intersections has relatively little influence at this time, and the intersection cost can be ignored and the intersections can be regarded as nodes and roads as edges of the directed graph.
道路层有向图GR表示为:The road layer directed graph G R is expressed as:
GR=(VR,ER) (7)G R =(V R , E R ) (7)
其中,VR为GR中节点的集合;ER是GR边的集合;边描述了顶点之间的连接关系(包含哪个顶点与哪个顶点相连,顶点之间边的属性);在道路层进行路径规划时,将路口作为节点,路口之间的道路作为边,利用公式(1)—(6) 得出(7)描述的有向图。当在GR中给出起点O和终点D时,使用A*算法,则获得由一系列道路交叉口组成的结果VR,用以下等式表示:Among them, V R is the set of nodes in GR ; E R is the set of GR edges; the edge describes the connection relationship between vertices (including which vertex is connected to which vertex, and the attributes of the edges between vertices); in the road layer In path planning, intersections are taken as nodes, roads between intersections are taken as edges, and the directed graph described in (7) is obtained by using formulas (1)-(6). When the starting point O and the ending point D are given in G R , using the A* algorithm, the result V R consisting of a series of road intersections is obtained, expressed by the following equation:
VR=(O,i1,…,ik…,in,D) (8)V R =(O,i 1 ,...,i k ...,i n ,D) (8)
其中,i1,ik,in分别是在道路层路线确定后获得的一系列路口中的第1个,第k个和最后1个路口,n是节点数(即路口数);Among them, i 1 , i k , i n are respectively the first, kth and last intersections in a series of intersections obtained after the road layer route is determined, and n is the number of nodes (that is, the number of intersections);
一系列交叉点之间的道路表示为:A road between a series of intersections is represented as:
ER=(r0,r1,…,rk…,rn) (9)E R =(r 0 ,r 1 ,…,r k …,r n ) (9)
其中,r0为点O所在的道路;rn是点D所在的道路;r1是第1个路口i1和第2 个路口i2之间的道路;rk是路口ik和ik+1之间的道路。Among them, r 0 is the road where point O is located; r n is the road where point D is located; r 1 is the road between the first intersection i 1 and the second intersection i 2 ; r k is the intersection i k and i k +1 for the road between.
22)在车道组层进行路径规划;22) Carry out path planning at the lane group layer;
车道组级别的路径规划使用车道组和道路之间的对应关系,将道路级别的规划结果细化为基于车道组的结果;Path planning at the lane group level uses the correspondence between lane groups and roads to refine the planning results at the road level into lane group-based results;
根据式(3)中的is_equal属性,获取与集合ER中的道路的行驶方向一致的一组车道组如下式所示:According to the is_equal attribute in formula (3), obtain a set of lane groups consistent with the driving direction of the road in the set E R as shown in the following formula:
Vlg=(lgO-1,…,lg(k-1)-k,…,lgn-D) (10)V lg =(lg O-1 ,…,lg (k-1)-k ,…,lg nD ) (10)
其中,lgO-1为起点O与第一个路口之间的车道组;lgn-D为第n个路口与目的地D之间的车道组;lg(k-1)-k为第(k-1)个路口与第k个路口之间的车道组, k=2,3,…,n;Among them, lg O-1 is the lane group between the starting point O and the first intersection; lg nD is the lane group between the nth intersection and the destination D; lg (k-1)-k is the (k- 1) the lane group between the intersection and the kth intersection, k=2,3,...,n;
24)在车道层进行路径规划;24) Carry out path planning at the lane level;
根据等式(3)和车道组层的路径规划结果,确定要选择的车道层节点;According to the path planning result of equation (3) and lane group layer, determine the lane layer node to be selected;
然后,应考虑交通规则或路况所引入的约束。想象一下,在一个交叉路口,左转弯由车道组节点序列确定,并且该车道组节点包括三个车道层节点。根据交通规则,最左侧的车道层节点是唯一可行的车道层节点。为了在路径规划中考虑类似情况,有必要根据有关交通规则和车道连通性的信息来消除不可行的节点。Then, constraints introduced by traffic rules or road conditions should be considered. Imagine an intersection where left turns are determined by a sequence of lane group nodes, and that lane group node includes three lane layer nodes. According to traffic rules, the leftmost lane layer node is the only feasible lane layer node. To consider similar situations in path planning, it is necessary to eliminate infeasible nodes based on information about traffic rules and lane connectivity.
车道层节点的确定是在确定的一组车道组Vlg=(lgO-1,…,lg(k-1)-k,… ,lgn-D)中根据车道级代价找到最佳的车道层节点,分别从起点和终点开始进行双向搜索,在每一个车道组中找到代价最小的节点;The determination of the lane layer node is to find the best lane layer node according to the lane-level cost in the determined group of lanes V lg = (lg O-1 ,...,lg (k-1)-k ,... ,lg nD ) , start a two-way search from the starting point and the end point respectively, and find the node with the least cost in each lane group;
所述双向搜索的具体方法如下:The specific method of the two-way search is as follows:
221)从起点开始正向搜索,并且同步从终点开始反向搜索,每一步均搜索一个车道组,根据公式(4)中包含对应车道属性信息的q,利用车道长度,限速信息,拥堵程度生成各个车道的代价,选取代价最低的车道作为目标车道;第1步,正向搜索确定起点O与第一个路口之间的最优车道,反向搜索确定第n 个路口与目的地D之间的最优车道;从第k(k>1)步开始,正向搜索确定了第k-1 个路口与第k个路口之间的最优车道,反向搜索确定了第n-k+1个路口与第 n-k+2个路口之间的最优车道;221) Start forward search from the starting point, and synchronize reverse search from the end point, each step searches for a lane group, according to the q that contains the corresponding lane attribute information in formula (4), using the lane length, speed limit information, and congestion level Generate the cost of each lane, and select the lane with the lowest cost as the target lane;
222)当n为奇数时,当正向搜索确定路口





223)当n为偶数的时候,对于路口

将节点从起点到终点顺序组合形成规划出的车道级路径如下所示:Combine the nodes sequentially from the start point to the end point to form the planned lane-level path as follows:
Vl=(lO-1,…,l(k-1)-k,…,ln-D) (11)V l = (l O-1 , ..., l (k-1)-k , ..., l nD ) (11)
其中,lO-1为起点O与第一个路口之间的车道;ln-D为第n个路口与目的地 D之间的车道;l(k-1)-k为第(k-1)个路口与第k个路口之间的车道,k=2,3,…,n。Among them, l O-1 is the lane between the starting point O and the first intersection; l nD is the lane between the nth intersection and the destination D; l (k-1)-k is the (k-1)th The lane between the intersection and the kth intersection, k=2,3,...,n.
为了说明本发明的有效性,建立了一个路网如图3所示,图中共有16个顶点和24条边,其中顶点代表交叉路口,边代表道路,顶点均是边的交叉点, x轴上共四个顶点分别位于x坐标为0,2,9,15处,y轴上共四个顶点分别位于y坐标为0,3,7,12处。单个交叉口横向的道路与x轴平行,最下边的三条道路与x轴重合,纵向的道路与y轴平行,最左边的三条道路与y轴重合。图的右侧圆圈描绘了左侧路网圆圈处的交叉点(交叉路口)内部的情况,可以看出有四条道路进入这个交叉口,序号1-6代表了车道编号,其中箭头代表了车道的行驶方向,点划线表示道路中心线,可以看出进入路口的每条道路都有两个车道组,每个车道组有三条车道,我们设定车道的行驶规则为:左车道左转,中间车道直行,右侧车道右转。In order to illustrate the effectiveness of the present invention, a road network has been established as shown in Figure 3, in which there are 16 vertices and 24 edges in total, wherein the vertices represent intersections, and the edges represent roads, and the vertices are all intersections of edges, and the x axis A total of four vertices on the above are located at the x coordinates of 0, 2, 9, and 15, and a total of four vertices on the y axis are located at the y coordinates of 0, 3, 7, and 12 respectively. The horizontal roads of a single intersection are parallel to the x-axis, the three bottommost roads coincide with the x-axis, the vertical roads are parallel to the y-axis, and the three leftmost roads coincide with the y-axis. The circle on the right side of the figure depicts the situation inside the intersection (intersection) at the road network circle on the left. It can be seen that there are four roads entering this intersection. The serial numbers 1-6 represent the lane numbers, and the arrows represent the lanes. Driving direction, the dotted line indicates the center line of the road. It can be seen that each road entering the intersection has two lane groups, and each lane group has three lanes. We set the driving rules of the lanes as follows: left lane turn left, middle lane Go straight in the lane and turn right in the right lane.
每条纵向的边(道路)右侧的数值以及每条横向的边(道路)上方的数值均为道路平均速度Vroad,单位为km/h。每条道路长度可由坐标系上的刻度值得知,整个道路为方形,横向总长为15km,纵向总长为12km。对于车道内平均行驶速度Vlane,我们设定最靠近道路中心线的两条车道(如图中右侧圆圈内的3和4车道)的Vlane为Vroad+10,每个车道组中间车道(如图中右侧圆圈内的2和5车道)的Vlane为Vroad,最远离道路中心线的两条车道(如图中右侧圆圈内的1和6车道)的Vlane为Vroad-10。The value on the right side of each longitudinal side (road) and the value above each horizontal side (road) are the average road speed V road , and the unit is km/h. The length of each road can be known from the scale value on the coordinate system. The entire road is square, with a total length of 15km in the horizontal direction and 12km in the vertical direction. For the average driving speed V lane in the lane, we set the V lane of the two lanes closest to the centerline of the road (the 3 and 4 lanes in the circle on the right in the figure) as V road +10, and the middle lane of each lane group (
以总时间最短为目标,运用本发明所述的车道级路径规划方法规划出从左下方顶点A到右上方顶点B的时间最短路径。如图4所示,规划出的路径用加粗的线条表示。Aiming at the shortest total time, use the lane-level path planning method of the present invention to plan the shortest path from the lower left vertex A to the upper right vertex B. As shown in Figure 4, the planned path is represented by a bold line.
从图4中可以看出,使用本发明阐述的车道级路径规划方法,规划出的路径所经过的道路平均速度都较高,用道路距离除以平均速度可以验证,用粗黑线表示的规划路径满足时间最短的目标,图4右图圆圈中为所指路口处的放大图,用点划线表示的箭头为规划出的车道,可以看出,由于从下方道路到上方道路要直行通过,所以进入路口的时候规划出要走中间车道,满足了交通规则指定的直行要走中间车道的要求;另一方面,由于靠近道路中心线的车道平均速度更高,所以离开路口驶入的是图中靠近道路中心线的4车道,满足了行驶时间最短的目标。As can be seen from Fig. 4, using the lane-level path planning method described in the present invention, the average speed of the roads passed by the planned path is all higher, which can be verified by dividing the road distance by the average speed, and the planning represented by the thick black line The path satisfies the goal of the shortest time. The circle on the right of Figure 4 is an enlarged view of the indicated intersection, and the arrow indicated by a dotted line is the planned lane. It can be seen that since the road from the bottom to the top road has to go straight through, Therefore, when entering the intersection, it is planned to use the middle lane, which satisfies the requirement of the traffic rules to go straight. The 4 lanes close to the centerline of the road meet the goal of the shortest driving time.
结合实施例可以看出本发明提出的一种面向自动驾驶车道级导航的车道级路径规划方法,包含一种面向自动驾驶车道级导航的车道级路网模型及针对模型提出的车道级路径规划方法能够有效准确地规划车辆从起点到终点的车道级别的路径,有效地服务于自动驾驶导航系统。Combining the embodiments, it can be seen that a lane-level path planning method for automatic driving lane-level navigation proposed by the present invention includes a lane-level road network model for automatic driving lane-level navigation and a lane-level path planning method proposed for the model It can effectively and accurately plan the lane-level path of the vehicle from the starting point to the ending point, and effectively serve the automatic driving navigation system.
以上结合附图详细描述了本发明的优选实施方式,但是,本发明的保护范围并不局限于上述实施方式中的具体细节,在本发明的技术构思范围内,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,这些简单变型均属于本发明的保护范围。The preferred implementation of the present invention has been described in detail above in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited to the specific details of the above-mentioned implementation. Within the scope of the technical concept of the present invention, any person skilled in the art Within the technical scope disclosed in the present invention, equivalent replacements or changes are made according to the technical solutions and the inventive concepts of the present invention, and these simple modifications all belong to the protection scope of the present invention.
另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。In addition, it should be noted that the various specific technical features described in the above specific embodiments can be combined in any suitable way if there is no contradiction. The combination method will not be described separately.
此外,本发明的各种不同的实施方式之间也可以进行任意组合,只要其不违背本发明的思想,其同样应当视为本发明所公开的内容。In addition, various combinations of different embodiments of the present invention can also be combined arbitrarily, as long as they do not violate the idea of the present invention, they should also be regarded as the disclosed content of the present invention.
Claims (1)




















Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110417450.0A CN113155145B (en) | 2021-04-19 | 2021-04-19 | A lane-level path planning method for lane-level navigation of autonomous driving |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110417450.0A CN113155145B (en) | 2021-04-19 | 2021-04-19 | A lane-level path planning method for lane-level navigation of autonomous driving |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN113155145A CN113155145A (en) | 2021-07-23 |
| CN113155145B true CN113155145B (en) | 2023-01-31 |
Family
ID=76868456
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110417450.0A Active CN113155145B (en) | 2021-04-19 | 2021-04-19 | A lane-level path planning method for lane-level navigation of autonomous driving |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113155145B (en) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113593238B (en) * | 2021-08-06 | 2022-09-23 | 吉林大学 | Intersection virtual lane modeling method for automatic driving navigation |
| CN113968243B (en) * | 2021-11-11 | 2024-02-23 | 北京三快在线科技有限公司 | Obstacle track prediction method, device, equipment and storage medium |
| CN114264313B (en) * | 2021-12-23 | 2024-10-29 | 上海逐路智能科技发展有限公司 | Potential energy-based lane-level path planning method, system, equipment and storage medium |
| CN115031715A (en) * | 2022-03-10 | 2022-09-09 | 阿里巴巴(中国)有限公司 | Navigation method and device |
| CN114674331B (en) * | 2022-03-10 | 2025-11-07 | 北京百度网讯科技有限公司 | Path planning method, path planning device, electronic equipment and readable storage medium |
| CN115127564B (en) * | 2022-06-29 | 2023-03-10 | 吉林大学 | A hierarchical map model for multi-level automatic driving navigation system |
| CN115547033A (en) * | 2022-08-25 | 2022-12-30 | 安徽仓擎机器人有限公司 | Traffic Signal Cooperative Control Method Based on Traffic Conditions |
| CN115437377A (en) * | 2022-08-31 | 2022-12-06 | 际络科技(上海)有限公司 | Automatic driving speed planning method, electronic device, vehicle and storage medium |
| CN115937812B (en) * | 2023-01-06 | 2023-05-16 | 河北博士林科技开发有限公司 | Method and system for generating virtual lane line of traffic intersection |
| CN115973197B (en) * | 2023-03-21 | 2023-08-11 | 宁波均胜智能汽车技术研究院有限公司 | Lane planning method and device, electronic equipment and readable storage medium |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5519619A (en) * | 1994-03-14 | 1996-05-21 | Motorola, Inc. | Route planning method for hierarchical map routing and apparatus therefor |
| CN102169637A (en) * | 2010-12-08 | 2011-08-31 | 北京大学 | Dynamic route guidance method oriented to urban traffic |
| CN108981741A (en) * | 2018-08-23 | 2018-12-11 | 武汉中海庭数据技术有限公司 | Path planning apparatus and method based on high-precision map |
| CN109976332A (en) * | 2018-12-29 | 2019-07-05 | 惠州市德赛西威汽车电子股份有限公司 | One kind being used for unpiloted accurately graph model and autonomous navigation system |
| CN110530393A (en) * | 2019-10-08 | 2019-12-03 | 北京邮电大学 | Lane grade paths planning method, device, electronic equipment and readable storage medium storing program for executing |
| CN111814286A (en) * | 2020-07-07 | 2020-10-23 | 吉林大学 | A lane-level map geometric model building method for autonomous driving |
| CN111947678A (en) * | 2020-08-27 | 2020-11-17 | 重庆智行者信息科技有限公司 | Automatic driving navigation method and system for structured road |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20150128712A (en) * | 2013-03-15 | 2015-11-18 | 칼리퍼 코포레이션 | Lane-level vehicle navigation for vehicle routing and traffic management |
-
2021
- 2021-04-19 CN CN202110417450.0A patent/CN113155145B/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5519619A (en) * | 1994-03-14 | 1996-05-21 | Motorola, Inc. | Route planning method for hierarchical map routing and apparatus therefor |
| CN102169637A (en) * | 2010-12-08 | 2011-08-31 | 北京大学 | Dynamic route guidance method oriented to urban traffic |
| CN108981741A (en) * | 2018-08-23 | 2018-12-11 | 武汉中海庭数据技术有限公司 | Path planning apparatus and method based on high-precision map |
| CN109976332A (en) * | 2018-12-29 | 2019-07-05 | 惠州市德赛西威汽车电子股份有限公司 | One kind being used for unpiloted accurately graph model and autonomous navigation system |
| CN110530393A (en) * | 2019-10-08 | 2019-12-03 | 北京邮电大学 | Lane grade paths planning method, device, electronic equipment and readable storage medium storing program for executing |
| CN111814286A (en) * | 2020-07-07 | 2020-10-23 | 吉林大学 | A lane-level map geometric model building method for autonomous driving |
| CN111947678A (en) * | 2020-08-27 | 2020-11-17 | 重庆智行者信息科技有限公司 | Automatic driving navigation method and system for structured road |
Non-Patent Citations (4)
| Title |
|---|
| 基于分层道路网络的新型路径规划算法;付梦印等;《计算机辅助设计与图形学学报》;20050420(第04期);719-722 * |
| 基于道路要素的多尺度路网数据模型;沙志仁等;《测绘科学》;20120520(第03期);82-84 * |
| 汽车导航用电子地图的高效路网模型;丁捷等;《汽车工程》;20030615(第03期);232-235 * |
| 车辆导航数字地图的蛛式路网模型;李挺等;《武汉理工大学学报(交通科学与工程版)》;20100615(第03期);439-442 * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113155145A (en) | 2021-07-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN113155145B (en) | A lane-level path planning method for lane-level navigation of autonomous driving | |
| US11933627B2 (en) | High-definition map building method and apparatus | |
| Jiang et al. | A flexible multi-layer map model designed for lane-level route planning in autonomous vehicles | |
| CN110081894B (en) | A real-time trajectory planning method for unmanned vehicles based on road structure weight fusion | |
| US6622085B1 (en) | Device and method for creating and using data on road map expressed by polygons | |
| CN116723970A (en) | Systems, methods and computer program products for autonomous driving topology planning using boundary representations | |
| CN114518122B (en) | Driving navigation method, device, computer equipment, storage medium and computer program product | |
| WO2020125686A1 (en) | Method for generating real-time relative map, intelligent driving device and computer storage medium | |
| CN115077550B (en) | A path planning method for unmanned vehicles based on matching navigation maps with high-precision maps | |
| CN106840178A (en) | A kind of map building based on ArcGIS and intelligent vehicle autonomous navigation method and system | |
| CN109959388A (en) | A refined route planning method for intelligent traffic based on grid extension model | |
| CN103499352B (en) | Mobile GPS real scene navigation system based on streetscape technology | |
| CN106530779B (en) | Path planning method and system based on urban traffic control signal lamp | |
| CN115042820A (en) | Automatic driving vehicle control method, device, device and storage medium | |
| CN117782126B (en) | Path planning decision method for autonomous driving guided by high-precision maps | |
| CN109974739A (en) | Global navigation system and guidance information generation method based on high-precision map | |
| CN104406590B (en) | A kind of shortest path planning method based on category of roads | |
| CN114987556A (en) | Automatic driving vehicle control method, device, device and storage medium | |
| CN115127564A (en) | Hierarchical map model for multi-level automatic driving navigation system | |
| CN110807931B (en) | Traffic network directed graph path model construction and solving method based on steering relation | |
| CN101424540B (en) | Map-matching method based on dynamic virtual crossing in vehicle navigation | |
| CN103258440A (en) | Algorithm for restoring wheel path based on road attributes and real-time road conditions | |
| Liu et al. | Lane-level route planning based on a multi-layer map model | |
| CN118640920A (en) | Vehicle path planning method, device, electronic device and storage medium | |
| CN108106619A (en) | Main and side road recognition methods and its system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |