CN112327820A - Control method, device, system and storage medium for automatic guided vehicle AGV - Google Patents
Control method, device, system and storage medium for automatic guided vehicle AGV Download PDFInfo
- Publication number
- CN112327820A CN112327820A CN202010536360.9A CN202010536360A CN112327820A CN 112327820 A CN112327820 A CN 112327820A CN 202010536360 A CN202010536360 A CN 202010536360A CN 112327820 A CN112327820 A CN 112327820A
- Authority
- CN
- China
- Prior art keywords
- agv
- parking area
- warehouse
- parking
- positions
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0234—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using optical markers or beacons
- G05D1/0236—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using optical markers or beacons in combination with a laser
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0214—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory in accordance with safety or protection criteria, e.g. avoiding hazardous areas
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0276—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle
- G05D1/0285—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle using signals transmitted via a public communication network, e.g. GSM network
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Optics & Photonics (AREA)
- Electromagnetism (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
技术领域technical field
本申请实施例涉及仓储避障技术领域,尤其涉及一种自动导引车AGV的控制方法、装置、系统及存储介质。The embodiments of the present application relate to the technical field of warehousing obstacle avoidance, and in particular, to a control method, device, system and storage medium for an AGV of an automatic guided vehicle.
背景技术Background technique
自动导引车(Automatic Guided Vehicle,AGV)是一种以电池为动力,装有非接触导向装置和独立寻址系统的无人驾驶自动化搬运车辆。其系统技术和产品已经成为柔性生产线、柔性装配线、仓储物流自动化系统的重要设备和技术。An Automatic Guided Vehicle (AGV) is a battery-powered, unmanned automated handling vehicle equipped with a non-contact guiding device and an independent addressing system. Its system technology and products have become important equipment and technologies for flexible production lines, flexible assembly lines, and warehousing and logistics automation systems.
目前AGV的自主导航技术发展成熟,AGV可自主执行一部分搬运、牵引货物的任务。在仓储管理过程中,工作人员有时需要进入AGV的工作区域,为了防止运行的AGV碰撞到入场的工作人员,目前最常用的技术是在AGV上安装避障传感器,当识别到有障碍物时,AGV自主停车。At present, the autonomous navigation technology of AGV is mature, and AGV can autonomously perform some tasks of handling and towing goods. In the process of warehouse management, staff sometimes need to enter the working area of AGV. In order to prevent the running AGV from colliding with the entering staff, the most commonly used technology is to install obstacle avoidance sensors on the AGV. When an obstacle is identified , AGV autonomous parking.
为了提升AGV避障效果,需要在AGV车身的多个方位安装避障传感器,对于需要大量AGV运行的仓库而言,构建AGV系统的成本很高。In order to improve the AGV obstacle avoidance effect, it is necessary to install obstacle avoidance sensors in multiple positions of the AGV body. For warehouses that require a large number of AGVs to operate, the cost of building an AGV system is very high.
发明内容SUMMARY OF THE INVENTION
本申请实施例提供一种自动导引车AGV的控制方法、装置、系统及存储介质,避免AGV对人员的碰撞,提高系统的安全性。Embodiments of the present application provide a control method, device, system and storage medium for an AGV of an automatic guided vehicle, so as to avoid the collision of the AGV with a person and improve the safety of the system.
第一方面,本申请实施例提供一种AGV的控制方法,包括:In a first aspect, an embodiment of the present application provides an AGV control method, including:
接收仓库在线的多个AGV在第一时刻上报的多个第一位置,以及进入仓库的用户持有的移动终端在所述第一时刻上报的第二位置;Receive multiple first positions reported by multiple AGVs online in the warehouse at the first moment, and second positions reported at the first moment by the mobile terminal held by the user entering the warehouse;
根据所述多个第一位置和所述第二位置,控制位于第一停车区域内的第一AGV停车,所述第二位置在所述第一停车区域内。According to the plurality of first positions and the second positions, the first AGV located in the first parking area is controlled to park, and the second position is in the first parking area.
在一种可能的实施方式中,所述根据所述第一位置和所述第二位置,控制位于第一停车区域内的第一AGV停车,包括:In a possible implementation manner, the controlling the parking of the first AGV located in the first parking area according to the first position and the second position includes:
根据所述第二位置确定仓库中以所述第二位置为中心、预设距离为半径的第一停车区域;determining the first parking area in the warehouse with the second position as the center and the preset distance as the radius according to the second position;
根据所述第一停车区域和所述多个第一位置,确定当前位于所述第一停车区域内的第一AGV;determining a first AGV currently located in the first parking area according to the first parking area and the plurality of first positions;
向所述第一AGV发送停车指令。Send a parking instruction to the first AGV.
可选地,所述预设距离大于或等于所述AGV的最大停车距离与所述移动终端定位误差值之和。Optionally, the preset distance is greater than or equal to the sum of the maximum parking distance of the AGV and the positioning error value of the mobile terminal.
在一种可能的实施方式中,所述方法还包括:In a possible implementation, the method further includes:
根据所述多个第一位置和所述第二位置,控制仓库中第二AGV避开所述第一停车区域,所述第二AGV位于所述第一停车区域之外的预设范围内,且所述第二AGV的预设运行路线经过所述第一停车区域。controlling the second AGV in the warehouse to avoid the first parking area according to the plurality of first positions and the second positions, and the second AGV is located within a preset range outside the first parking area, And the preset running route of the second AGV passes through the first parking area.
在一种可能的实施方式中,所述根据所述多个第一位置和所述第二位置,控制仓库中第二AGV避开所述第一停车区域,包括:In a possible implementation manner, the controlling the second AGV in the warehouse to avoid the first parking area according to the plurality of first locations and the second locations includes:
根据所述第二位置确定仓库中以所述第二位置为中心、预设距离为半径的第一停车区域;determining the first parking area in the warehouse with the second position as the center and the preset distance as the radius according to the second position;
根据所述第一停车区域和所述多个第一位置,确定当前位于所述第一停车区域之外预设范围内的第三AGV,从所述第三AGV中筛选出预设运行路径经过所述第一停车区域的第二AGV;According to the first parking area and the plurality of first positions, a third AGV currently located within a preset range outside the first parking area is determined, and a preset running path is selected from the third AGV to pass through a second AGV in the first parking area;
对所述第二AGV的运行路径进行重新规划,向所述第二AGV发送新的路径控制指令。The running path of the second AGV is re-planned, and a new path control instruction is sent to the second AGV.
在一种可能的实施方式中,所述方法还包括:In a possible implementation, the method further includes:
接收仓库在线的多个AGV在第二时刻上报的多个第三位置,以及所述移动终端在所述第二时刻上报的第四位置;Receive multiple third positions reported by multiple AGVs online at the warehouse at the second moment, and the fourth position reported by the mobile terminal at the second moment;
根据所述多个第三位置和所述第四位置,控制位于第二停车区域内的第四AGV停车,所述第四位置在所述第二停车区域内。A fourth AGV located in a second parking area is controlled to park according to the plurality of third positions and the fourth position, the fourth position being in the second parking area.
可选地,所述第二停车区域包括与所述第一停车区域不重叠的第一子区域。Optionally, the second parking area includes a first sub-area that does not overlap with the first parking area.
在一种可能的实施方式中,所述根据所述多个第三位置和所述第四位置,控制第四AGV停车,包括:In a possible implementation manner, the controlling the fourth AGV to stop according to the plurality of third positions and the fourth positions includes:
根据所述第四位置确定仓库中以所述第四位置为中心、所述预设距离为半径的第二停车区域;determining a second parking area in the warehouse with the fourth position as the center and the preset distance as the radius according to the fourth position;
根据所述第二停车区域、所述第一停车区域以及所述多个第三位置,确定当前位于所述第一子区域的第四AGV;determining a fourth AGV currently located in the first sub-area according to the second parking area, the first parking area, and the plurality of third locations;
向所述第四AGV发送停车指令。A parking instruction is sent to the fourth AGV.
可选地,所述第一停车区域包括与所述第二停车区域不重叠的第二子区域。Optionally, the first parking area includes a second sub-area that does not overlap with the second parking area.
在一种可能的实施方式中,所述方法还包括:In a possible implementation, the method further includes:
控制当前位于所述第二子区域的第五AGV启动。The fifth AGV currently located in the second sub-area is controlled to be activated.
在一种可能的实施方式中,若在预设时间段内未接收到所述移动终端上报的位置更新,所述方法还包括:In a possible implementation manner, if the location update reported by the mobile terminal is not received within a preset time period, the method further includes:
向所有在线AGV发送停车指令。Send parking instructions to all online AGVs.
第二方面,本申请实施例提供一种AGV的控制装置,包括:In a second aspect, an embodiment of the present application provides an AGV control device, including:
接收模块,用于接收仓库在线的多个AGV在第一时刻上报的多个第一位置,以及进入仓库的用户持有的移动终端在所述第一时刻上报的第二位置;a receiving module, configured to receive multiple first positions reported by multiple AGVs online in the warehouse at the first moment, and second positions reported by the mobile terminal held by the user entering the warehouse at the first moment;
处理模块,用于根据所述多个第一位置和所述第二位置,控制位于第一停车区域内的第一AGV停车,所述第二位置在所述第一停车区域内。The processing module is configured to control the parking of the first AGV located in the first parking area according to the plurality of first positions and the second positions, and the second position is in the first parking area.
在一种可能的实施方式中,所述处理模块,具体用于根据所述第二位置确定仓库中以所述第二位置为中心、预设距离为半径的第一停车区域;In a possible implementation manner, the processing module is specifically configured to determine, according to the second position, a first parking area in the warehouse with the second position as a center and a preset distance as a radius;
根据所述第一停车区域和所述多个第一位置,确定当前位于所述第一停车区域内的第一AGV;determining a first AGV currently located in the first parking area according to the first parking area and the plurality of first positions;
所述装置还包括:发送模块,用于向所述第一AGV发送停车指令。The device further includes: a sending module for sending a parking instruction to the first AGV.
所述预设距离大于或等于所述AGV的最大停车距离与所述移动终端定位误差值之和。The preset distance is greater than or equal to the sum of the maximum parking distance of the AGV and the positioning error value of the mobile terminal.
在一种可能的实施方式中,所述处理模块,还用于:In a possible implementation manner, the processing module is further configured to:
根据所述多个第一位置和所述第二位置,控制仓库中第二AGV避开所述第一停车区域,所述第二AGV位于所述第一停车区域之外的预设范围内,且所述第二AGV的预设运行路线经过所述第一停车区域。controlling the second AGV in the warehouse to avoid the first parking area according to the plurality of first positions and the second positions, and the second AGV is located within a preset range outside the first parking area, And the preset running route of the second AGV passes through the first parking area.
在一种可能的实施方式中,所述处理模块,具体用于:In a possible implementation manner, the processing module is specifically used for:
根据所述第二位置确定仓库中以所述第二位置为中心、预设距离为半径的第一停车区域;determining the first parking area in the warehouse with the second position as the center and the preset distance as the radius according to the second position;
根据所述第一停车区域和所述多个第一位置,确定当前位于所述第一停车区域之外预设范围内的第三AGV,从所述第三AGV中筛选出预设运行路径经过所述第一停车区域的第二AGV;According to the first parking area and the plurality of first positions, a third AGV currently located within a preset range outside the first parking area is determined, and a preset running path is selected from the third AGV to pass through a second AGV in the first parking area;
对所述第二AGV的运行路径进行重新规划;re-plan the running path of the second AGV;
发送模块,还用于向所述第二AGV发送新的路径控制指令。The sending module is further configured to send a new path control instruction to the second AGV.
在一种可能的实施方式中,所述接收模块,还用于接收仓库在线的多个AGV在第二时刻上报的多个第三位置,以及所述移动终端在所述第二时刻上报的第四位置;In a possible implementation manner, the receiving module is further configured to receive a plurality of third positions reported by a plurality of online AGVs in the warehouse at a second moment, and a number of third positions reported by the mobile terminal at the second moment. four positions;
所述处理模块,还用于根据所述多个第三位置和所述第四位置,控制位于第二停车区域内的第四AGV停车,所述第四位置在所述第二停车区域内。The processing module is further configured to control a fourth AGV located in a second parking area to park according to the plurality of third positions and the fourth position, and the fourth position is in the second parking area.
可选地,所述第二停车区域包括与所述第一停车区域不重叠的第一子区域。Optionally, the second parking area includes a first sub-area that does not overlap with the first parking area.
在一种可能的实施方式中,所述处理模块,具体用于:In a possible implementation manner, the processing module is specifically used for:
根据所述第四位置确定仓库中以所述第四位置为中心、所述预设距离为半径的第二停车区域;determining a second parking area in the warehouse with the fourth position as the center and the preset distance as the radius according to the fourth position;
根据所述第二停车区域、所述第一停车区域以及所述多个第三位置,确定当前位于所述第一子区域的第四AGV;determining a fourth AGV currently located in the first sub-area according to the second parking area, the first parking area, and the plurality of third locations;
所述发送模块,还用于向所述第四AGV发送停车指令。The sending module is further configured to send a parking instruction to the fourth AGV.
可选地,所述第一停车区域包括与所述第二停车区域不重叠的第二子区域。Optionally, the first parking area includes a second sub-area that does not overlap with the second parking area.
在一种可能的实施方式中,所述处理模块,还用于控制当前位于所述第二子区域的第五AGV启动。In a possible implementation manner, the processing module is further configured to control the activation of the fifth AGV currently located in the second sub-area.
在一种可能的实施方式中,若在预设时间段内未接收到所述移动终端上报的位置更新,所述发送模块,还用于向所有在线AGV发送停车指令。In a possible implementation manner, if the location update reported by the mobile terminal is not received within a preset time period, the sending module is further configured to send a parking instruction to all online AGVs.
第三方面,本申请实施例提供一种AGV的控制装置,包括:In a third aspect, an embodiment of the present application provides an AGV control device, including:
至少一个处理器;以及at least one processor; and
与所述至少一个处理器通信连接的存储器;其中,a memory communicatively coupled to the at least one processor; wherein,
所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述控制装置能够执行第一方面中任一项所述的方法。The memory stores instructions executable by the at least one processor, the instructions being executed by the at least one processor to enable the control device to perform the method of any one of the first aspects.
第四方面,本申请实施例提供一种AGC的控制系统,包括:AGV的控制装置、仓库在线的多个AGV以及进入仓库的用户持有的移动终端,所述AGV控制装置分别与所述多个AGV、所述移动终端通信连接;In a fourth aspect, an embodiment of the present application provides an AGC control system, including: an AGV control device, a plurality of AGVs on-line in a warehouse, and a mobile terminal held by a user entering the warehouse, wherein the AGV control device is respectively connected with the multiple AGVs. AGV, the mobile terminal communication connection;
其中,所述控制装置用于执行如第一方面中任一项所述的方法,控制所述多个AGV停车或启动。Wherein, the control device is configured to execute the method according to any one of the first aspect, and control the multiple AGVs to stop or start.
在一种可能的实施方式中,所述控制系统还包括:In a possible implementation, the control system further includes:
至少三个定位发射器,所述定位发射器用于发射广播信号,所述移动终端用于接收所述至少三个定位发射器发射的广播信号,根据所述广播信号确定所述移动终端的实时位置,并将所述实时位置上报至所述AGV的控制装置。At least three positioning transmitters, the positioning transmitters are used for transmitting broadcast signals, the mobile terminal is used for receiving the broadcast signals transmitted by the at least three positioning transmitters, and the real-time position of the mobile terminal is determined according to the broadcast signals , and report the real-time position to the control device of the AGV.
第五方面,本申请实施例提供一种计算机可读存储介质,包括:用于存储计算机程序,当所述计算机程序在计算机上执行时,使得所述计算机执行第一方面中任一项所述的方法。In a fifth aspect, an embodiment of the present application provides a computer-readable storage medium, including: a computer program for storing a computer program, which, when the computer program is executed on a computer, causes the computer to execute any one of the first aspects. Methods.
本申请实施例提供一种自动导引车AGV的控制方法、装置、系统及存储介质。该方法包括:接收仓库在线的多个AGV在第一时刻上报的多个第一位置,以及进入仓库的用户持有的移动终端在第一时刻上报的第二位置;根据多个第一位置和第二位置,控制位于第一停车区域内的第一AGV停车,其中第二位置在第一停车区域内。上述控制方法可避免AGV对人员的碰撞,提高系统的安全性。与现有方案相比,由于不需要给每一个AGV安装多个方位的避障传感器,降低了构建AGV系统的成本。Embodiments of the present application provide a control method, device, system, and storage medium for an automatic guided vehicle AGV. The method includes: receiving multiple first positions reported at the first moment by multiple AGVs online in the warehouse, and second positions reported at the first moment by a mobile terminal held by a user entering the warehouse; according to the multiple first positions and In the second position, the first AGV located in the first parking area is controlled to park, wherein the second position is in the first parking area. The above control method can avoid the collision of the AGV with the personnel and improve the safety of the system. Compared with the existing solution, since there is no need to install obstacle avoidance sensors in multiple directions for each AGV, the cost of building an AGV system is reduced.
附图说明Description of drawings
图1a为本申请实施例提供的一种AGV系统的架构示意图;FIG. 1a is a schematic diagram of the architecture of an AGV system provided by an embodiment of the application;
图1b为本申请实施例提供的一种AGV系统的架构示意图;FIG. 1b is a schematic diagram of the architecture of an AGV system provided by an embodiment of the application;
图2为本申请实施例提供的一种AGV的控制方法的流程图;FIG. 2 is a flowchart of a control method of an AGV provided by an embodiment of the present application;
图3为本申请实施例提供的第一时刻的仓库俯视图;3 is a top view of a warehouse at the first moment provided by an embodiment of the present application;
图4为本申请实施例提供的一种AGV的控制方法的流程图;FIG. 4 is a flowchart of an AGV control method provided by an embodiment of the present application;
图5为本申请实施例提供的第一时刻的仓库俯视图;5 is a top view of a warehouse at the first moment provided by an embodiment of the present application;
图6为本申请实施例提供的一种AGV的控制方法的流程图;FIG. 6 is a flowchart of an AGV control method provided by an embodiment of the present application;
图7为本申请实施例提供的连续两个时刻的停车区域的示意图;7 is a schematic diagram of a parking area at two consecutive times provided by an embodiment of the present application;
图8为本申请实施例提供的连续两个时刻的仓库俯视图;8 is a top view of a warehouse at two consecutive moments provided by an embodiment of the present application;
图9为本申请实施例提供的一种AGV的控制装置的结构示意图;FIG. 9 is a schematic structural diagram of an AGV control device provided by an embodiment of the present application;
图10为本申请实施例提供的一种AGV的控制装置的硬件结构示意图。FIG. 10 is a schematic diagram of a hardware structure of an AGV control apparatus provided by an embodiment of the present application.
具体实施方式Detailed ways
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。The technical solutions in the embodiments of the present application will be clearly and completely described below with reference to the drawings in the embodiments of the present application. Obviously, the described embodiments are only a part of the embodiments of the present application, but not all of the embodiments. Based on the embodiments in the present application, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present application.
本申请的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本申请的实施例例如能够以除了在这里图示或描述的那些以外的顺序实施。The terms "first", "second" and the like in the description and claims of the present application and the above drawings are used to distinguish similar objects, and are not necessarily used to describe a specific order or sequence. It is to be understood that the data so used may be interchanged under appropriate circumstances such that the embodiments of the application described herein can, for example, be practiced in sequences other than those illustrated or described herein.
此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。Furthermore, the terms "comprising" and "having" and any variations thereof, are intended to cover non-exclusive inclusion, for example, a process, method, system, product or device comprising a series of steps or units is not necessarily limited to those expressly listed Rather, those steps or units may include other steps or units not expressly listed or inherent to these processes, methods, products or devices.
目前电商仓库已使用AGV进行货物搬运,自动化程度高。然而,由于AGV故障或者仓库其他管理需求,工作人员有时需要进入AGV工作区域,为了防止AGV碰撞工作人员,通常在AGV上安装避障传感器,该避障传感器用于识别AGV附近的障碍物,障碍物包括工作人员以及其他AGV。通常情况下,在AGV的前方安装避障传感器,由于识别范围有限,避障效果不佳。为了增强AGV的识别能力,可以在AGV的多个方位上安装避障传感器,该方案适用于AGV数量较少的场景。然而,对于需要大量AGV运行的仓库而言,采用上述方案的成本很高。At present, e-commerce warehouses have used AGVs for cargo handling, with a high degree of automation. However, due to AGV failure or other management needs of the warehouse, workers sometimes need to enter the AGV work area. In order to prevent the AGV from colliding with workers, an obstacle avoidance sensor is usually installed on the AGV, which is used to identify obstacles near the AGV, obstacles Objects include staff and other AGVs. Usually, an obstacle avoidance sensor is installed in front of the AGV. Due to the limited recognition range, the obstacle avoidance effect is not good. In order to enhance the recognition ability of the AGV, obstacle avoidance sensors can be installed in multiple directions of the AGV. This solution is suitable for scenarios with a small number of AGVs. However, for warehouses that require a large number of AGVs to operate, the cost of adopting the above solutions is high.
为了解决上述问题,本申请实施例提供一种AGV的控制方法,该方法可应用于AGV系统的控制平台,该平台基于多个AGV以及工作人员持有的定位装置上报的位置信息,控制工作人员所在位置附近的预设范围内的AGV停车。上述方案可有效防止AGV对进入仓库的工作人员的碰撞,提高整个系统的安全性。需要说明的是,上述方案适用于大、中、小型仓库,平台控制的各AGV上只需安装一个低精度低成本的避障传感器(用于辅助检测障碍物或人)即可,大幅降低构建AGV系统的成本。In order to solve the above problems, an embodiment of the present application provides an AGV control method, which can be applied to a control platform of an AGV system. The AGV stops within a preset range near the location. The above solution can effectively prevent the AGV from colliding with the staff entering the warehouse and improve the safety of the entire system. It should be noted that the above solution is suitable for large, medium and small warehouses. Only one low-precision and low-cost obstacle avoidance sensor (used to assist in detecting obstacles or people) is required on each AGV controlled by the platform, which greatly reduces the construction cost. The cost of the AGV system.
首先结合附图1a、附图1b对本申请实施例提供的AGV控制方法的系统架构进行详细介绍。First, the system architecture of the AGV control method provided by the embodiment of the present application is introduced in detail with reference to FIG. 1a and FIG. 1b.
图1a为本申请实施例提供的一种AGV系统的架构示意图,如图1a所示,本实施例提供的AGV系统100包括控制平台110、多个AGV120以及进入仓库的用户持有的移动终端130。控制平台110分别与多个AGV120、移动终端130通信连接。FIG. 1a is a schematic diagram of the architecture of an AGV system provided by an embodiment of the application. As shown in FIG. 1a, the
基于图1a所示的系统架构,控制平台110在同一时刻接收多个AGV120以及移动终端130上报的实时位置,移动终端上报的实时位置即为工作人员在仓库中的实时位置,控制平台110基于多个AGV120以及移动终端130上报的实时位置,确定与工作人员距离小于预设安全距离的一部分AGV,控制这部分AGV停车,防止AGV运行过程中碰撞到工作人员。其中,AGV120可通过识别仓库地面上的铺设的二维码来确定自身位置,并实时向控制平台110上报位置。移动终端130可采用任意一种室内定位技术确定自身位置,对此本申请实施例不作任何限制。Based on the system architecture shown in FIG. 1a, the
图1b为本申请实施例提供的一种AGV系统的架构示意图,如图1b所示,本实施例提供的AGV系统100包括控制平台110、多个AGV120、进入仓库的用户持有的移动终端130、定位发射器140。控制平台110分别与多个AGV120、移动终端130通信连接。在仓库布置至少3个定位发射器140,各定位发射器140在仓库的位置固定不变,定位发射器140通过固定的功率发射信号。在实际应用中,可根据仓库的大小设置更多的定位发射器,实现发射信号的全覆盖。FIG. 1b is a schematic diagram of the architecture of an AGV system provided by an embodiment of the application. As shown in FIG. 1b, the
基于图1b所示的系统架构,移动终端130通过接收各个定位发射器140发射的广播信号,确定移动终端130到各个定位发射器140的距离,再通过空间坐标计算得到移动终端130在仓库中的实时位置。可选地,移动终端130可采用多种方法计算与各个定位发射器140的距离,例如接收信号强度(received signal strength indication,RSSI)测距定位法或者时间到达法等。控制平台110在同一时刻接收多个AGV120以及移动终端130上报的实时位置,移动终端上报的实时位置即为工作人员在仓库中的实时位置,控制平台110基于多个AGV120以及移动终端130上报的实时位置,确定与工作人员距离小于预设安全距离的一部分AGV,控制这部分AGV停车,防止AGV运行过程中碰撞到工作人员。Based on the system architecture shown in FIG. 1b, the
在一些实施例中,控制平台110可通过路由器交换机连接无线接入点AP,控制平台110可通过wifi与多个AGV120进行通信,AGV120接收并执行控制平台110发送的各种指令,进行各种动作处理,例如启动、停车、加减速等。In some embodiments, the
本申请实施例对移动终端的类型不作任何限制,只要具备定位功能即可,例如移动终端130可以是智能手机、IPAD、手提电脑、可穿戴设备(例如智能手表、手环、眼镜)等。This embodiment of the present application does not impose any restrictions on the type of the mobile terminal, as long as it has a positioning function.
下面以具体地实施例对本申请的技术方案进行详细说明。下面这几个具体的实施例可以相互结合,对于相同或相似的概念或过程可能在某些实施例不再赘述。The technical solutions of the present application will be described in detail below with specific examples. The following specific embodiments may be combined with each other, and the same or similar concepts or processes may not be repeated in some embodiments.
图2为本申请实施例提供的一种AGV的控制方法的流程图,如图2所示,本实施例提供的控制方法包括如下步骤:FIG. 2 is a flowchart of an AGV control method provided by an embodiment of the present application. As shown in FIG. 2 , the control method provided by this embodiment includes the following steps:
步骤210、接收仓库在线的多个AGV在第一时刻上报的多个第一位置,以及进入仓库的用户持有的移动终端在第一时刻上报的第二位置。Step 210: Receive multiple first positions reported at the first moment by multiple AGVs online in the warehouse, and second positions reported at the first moment by the mobile terminal held by the user entering the warehouse.
步骤220、根据多个第一位置和第二位置,控制位于第一停车区域内的第一AGV停车。Step 220: Control the parking of the first AGV located in the first parking area according to the plurality of first positions and the second positions.
其中,第二位置在第一停车区域内。在一种可能的实施方式中,第二位置作为第一停车区域的中心位置,第一停车区域可以是以第二位置为中心、预设距离为半径的圆形区域,也可以是以第二位置为中心的方形区域,还可以是其他形状的区域,对此本申请实施例不作任何限制。Wherein, the second location is within the first parking area. In a possible implementation manner, the second position is used as the center position of the first parking area, and the first parking area may be a circular area with the second position as the center and the preset distance as the radius, or the second position as the center. The square area with the position as the center may also be an area of other shapes, which is not limited in this embodiment of the present application.
在一种可能的实施方式中,步骤220具体包括如下步骤:根据第二位置确定仓库中以第二位置为中心、预设距离为半径的第一停车区域。再根据第一停车区域和多个第一位置,确定当前位于第一停车区域内的第一AGV。最后向第一AGV发送停车指令。In a possible implementation manner, step 220 specifically includes the following steps: determining, according to the second position, a first parking area in the warehouse with the second position as the center and the preset distance as the radius. Then, according to the first parking area and the plurality of first positions, determine the first AGV currently located in the first parking area. Finally, a parking instruction is sent to the first AGV.
本实施例中的预设距离可根据经验值设定,还可以采用如下方式设定:The preset distance in this embodiment can be set according to empirical values, and can also be set in the following ways:
预设距离大于或等于AGV的最大停车距离与移动终端定位误差值之和。其中,AGV的最大停车距离是指AGV在接收到停车指令到最终停车AGV的行驶距离。例如,AGV的最大停车距离为5m,移动终端定位误差值为0.5m,预设距离大于或等于5.5m,为了防止AGV碰撞到工作人员,可以将预设距离扩大,例如设置为8m,即第一停车区域为以第二位置为中心,8m为半径的区域。The preset distance is greater than or equal to the sum of the maximum parking distance of the AGV and the positioning error of the mobile terminal. Among them, the maximum parking distance of the AGV refers to the driving distance of the AGV after receiving the parking instruction to the final parking of the AGV. For example, the maximum parking distance of the AGV is 5m, the positioning error of the mobile terminal is 0.5m, and the preset distance is greater than or equal to 5.5m. In order to prevent the AGV from colliding with the staff, the preset distance can be expanded, for example, set to 8m, that is, the first A parking area is an area with a second location as the center and a radius of 8m.
图3为本申请实施例提供的第一时刻的仓库俯视图,如图3所示,在第一时刻,控制平台接收到用户持有的移动终端上报的第二位置310,以第二位置310为中心、预设距离r1为半径的第一停车区域320内有两台在线运行的AGV,分别为AGV331和AGV332,控制平台向这两台AGV发送停车指令。FIG. 3 is a top view of the warehouse at the first moment provided by an embodiment of the present application. As shown in FIG. 3 , at the first moment, the control platform receives the
本实施例提供的AGV的控制方法,通过用户持有的移动终端上报的位置获取进入仓库人员的实时位置,根据该位置控制该位置附近预设范围内的AGV停车,避免AGV对人员的碰撞,提高系统的安全性。与现有方案相比,由于不需要给每一个AGV安装多个方位的避障传感器,大幅降低构建AGV系统的成本。In the AGV control method provided by this embodiment, the real-time position of the personnel entering the warehouse is obtained through the position reported by the mobile terminal held by the user, and the AGV parking within a preset range near the position is controlled according to the position, so as to avoid the collision of the AGV with the personnel, Improve system security. Compared with the existing solution, since there is no need to install obstacle avoidance sensors in multiple directions for each AGV, the cost of building an AGV system is greatly reduced.
图4为本申请实施例提供的一种AGV的控制方法的流程图,如图4所示,本实施例提供的控制方法包括如下步骤:FIG. 4 is a flowchart of an AGV control method provided by an embodiment of the present application. As shown in FIG. 4 , the control method provided by this embodiment includes the following steps:
步骤410、接收仓库在线的多个AGV在第一时刻上报的多个第一位置以及进入仓库的用户持有的移动终端在第一时刻上报的第二位置。Step 410: Receive multiple first positions reported at the first moment by multiple AGVs online in the warehouse and second positions reported at the first moment by the mobile terminal held by the user entering the warehouse.
步骤420、根据多个第一位置和第二位置,控制仓库中第二AGV避开第一停车区域。Step 420: Control the second AGV in the warehouse to avoid the first parking area according to the plurality of first positions and the second positions.
其中,第二AGV位于第一停车区域之外的预设范围内,且第二AGV的预设运行路线经过第一停车区域。第一停车区域同上述实施例,此处不再赘述。Wherein, the second AGV is located within a preset range outside the first parking area, and the preset running route of the second AGV passes through the first parking area. The first parking area is the same as that in the above-mentioned embodiment, and details are not repeated here.
在一种可能的实施方式中,第一停车区域设定为以第二位置为中心、预设距离为半径的圆形区域。步骤420,具体包括以下步骤:In a possible implementation manner, the first parking area is set as a circular area with the second position as the center and the preset distance as the radius. Step 420 specifically includes the following steps:
根据第二位置确定仓库中以第二位置为中心、预设距离为半径的第一停车区域。再根据第一停车区域和多个第一位置,确定当前位于第一停车区域之外预设范围内的第三AGV。然后从第三AGV中筛选出预设运行路径经过第一停车区域的第二AGV。最后对第二AGV的运行路径进行重新规划,向第二AGV发送新的路径控制指令。A first parking area in the warehouse with the second position as the center and the preset distance as the radius is determined according to the second position. Then, according to the first parking area and the plurality of first positions, determine the third AGV currently located within the preset range outside the first parking area. Then, the second AGV whose preset running path passes through the first parking area is selected from the third AGV. Finally, the running path of the second AGV is re-planned, and a new path control instruction is sent to the second AGV.
上述示例中考虑到第一停车区域之外预设范围内的部分第三AGV有可能不会经过第一停车区域,那么就无需对这些AGC进行重新路径规划。为了避免不必要的路径调整,控制平台需要对第三AGV作进一步筛选,最终得到需要重新规划路径的第二AGV,控制平台只需要对第二AGV重新规划路径,控制即将进入第一停车区域的第二AGC绕开第一停车区域。需要说明的是,本实施例中的第一停车区域在一定时间段内不会发生变化。In the above example, considering that some third AGVs within the preset range outside the first parking area may not pass through the first parking area, there is no need to re-route these AGCs. In order to avoid unnecessary path adjustment, the control platform needs to further screen the third AGV, and finally obtain the second AGV whose path needs to be re-planned. The second AGC bypasses the first parking area. It should be noted that the first parking area in this embodiment will not change within a certain period of time.
图5为本申请实施例提供的第一时刻的仓库俯视图,如图5所示,在第一时刻,控制平台接收到用户持有的移动终端上报的第二位置310,以第二位置310为中心、预设距离r1为半径的第一停车区域320内有两台在线运行的AGV,分别为AGV331和AGV332,控制平台向这两台AGV发送停车指令。除此之外,在以第二位置310为中心,半径分别为r1和r2的两个圆环组成的环形区域内,有三台在线运行的AGV,分别为AGV333、AGV334、AGV335。控制平台根据这三台AGV的预设运行路径,可以确定其中两台AGV,分别为AGV333以及AGV334的预设运行路径会经过第一停车区域320,为了提高在线AGV的运行效率,控制平台可以调度即将进入第一停车区域320的AGV333以及AGV334,对这两台AGV进行重新的路径规划,使其绕开第一停车区域320。由于环形区域内的AGV335不会经过第一停车区域320,控制平台无需对该AGV进行指令控制。FIG. 5 is a top view of the warehouse at the first moment provided by this embodiment of the application. As shown in FIG. 5 , at the first moment, the control platform receives the
本实施例提供的AGV的控制方法,通过用户持有的移动终端上报的位置获取进入仓库人员的实时位置,根据该位置控制该位置附近预设范围内的AGV停车,除此之外,还可以对预设范围之外的一定范围内的AGV的运行路径进行适当调整,使得即将进入预设范围的AGV绕行,避免更多AGV停车,提高系统在线AGV的运行效率。In the AGV control method provided in this embodiment, the real-time position of the personnel entering the warehouse is obtained through the position reported by the mobile terminal held by the user, and the AGV parking within a preset range near the position is controlled according to the position. Appropriately adjust the running path of AGVs within a certain range outside the preset range, so that the AGVs that are about to enter the preset range bypass, avoid more AGV parking, and improve the operating efficiency of the system online AGV.
图6为本申请实施例提供的一种AGV的控制方法的流程图。在图2所示实施例的基础上,如图6所示,本实施例提供的控制方法还包括:FIG. 6 is a flowchart of an AGV control method provided by an embodiment of the present application. On the basis of the embodiment shown in FIG. 2 , as shown in FIG. 6 , the control method provided by this embodiment further includes:
步骤510、接收仓库在线的多个AGV在第二时刻上报的多个第三位置,以及移动终端在第二时刻上报的第四位置。Step 510: Receive multiple third positions reported by multiple AGVs online in the warehouse at the second moment, and fourth positions reported by the mobile terminal at the second moment.
在本申请实施例中,第二时刻为与第一时刻连续的下一时刻。AGV以及移动终端可基于相同的上报周期,向控制平台上报位置,例如每隔2s上报一次位置。其中,上报周期为第二时刻与第一时刻的时间差。In this embodiment of the present application, the second time is the next time that is continuous with the first time. The AGV and the mobile terminal can report the position to the control platform based on the same reporting period, for example, report the position every 2s. The reporting period is the time difference between the second moment and the first moment.
步骤520、根据多个第三位置和第四位置,控制位于第二停车区域内的第四AGV停车。Step 520: Control the fourth AGV located in the second parking area to park according to the plurality of third positions and the fourth positions.
其中,第四位置在第二停车区域内。Wherein, the fourth location is within the second parking area.
与图2实施例中的第一停车区域类似,在一种可能的实施方式中,第四位置作为第二停车区域的中心位置,第二停车区域可以是以第四位置为中心、预设距离为半径的圆形区域,也可以是以第四位置为中心的方形区域,还可以是其他形状的区域,对此本申请实施例不作任何限制。Similar to the first parking area in the embodiment of FIG. 2 , in a possible implementation manner, the fourth position is used as the center position of the second parking area, and the second parking area may be centered on the fourth position with a preset distance. is a circular area with a radius, may also be a square area with the fourth position as the center, or may be an area of other shapes, which is not limited in this embodiment of the present application.
第一时刻与第二时刻为连续的两个时刻,第一时刻对应第一停车区域,第二时刻对应第二停车区域,第一停车区域与第二停车区域存在两种位置关系:相互独立,或者,部分区域重叠。The first moment and the second moment are two consecutive moments. The first moment corresponds to the first parking area, and the second moment corresponds to the second parking area. There are two positional relationships between the first parking area and the second parking area: independent of each other, Or, some areas overlap.
在一种可能的情况下,第一停车区域与第二停车区域相互独立。In a possible situation, the first parking area and the second parking area are independent of each other.
步骤520,具体包括如下步骤:根据第四位置确定仓库中以第四位置为中心、预设距离为半径的第二停车区域,再根据第二停车区域以及多个第三位置,确定当前位于第二停车区域的第四AGV,最后向第四AGV发送停车指令。Step 520 specifically includes the following steps: determining a second parking area in the warehouse with the fourth location as the center and the preset distance as the radius according to the fourth location, and then determining the current location in the warehouse according to the second parking area and a plurality of third locations. The fourth AGV in the second parking area finally sends a parking instruction to the fourth AGV.
在一种可能的情况下,第一停车区域与第二停车区域存在部分区域重叠。其中,第二停车区域包括与第一停车区域不重叠的第一子区域,第一停车区域包括与第二停车区域不重叠的第二子区域,第二停车区域与第一停车区域均包括第三子区域,第三子区域为重叠区域。In a possible situation, the first parking area and the second parking area have a partial overlap. The second parking area includes a first sub-area that does not overlap with the first parking area, the first parking area includes a second sub-area that does not overlap with the second parking area, and both the second parking area and the first parking area include a first parking area. There are three sub-regions, and the third sub-region is an overlapping region.
步骤520,具体包括如下步骤:根据第四位置确定仓库中以第四位置为中心、预设距离为半径的第二停车区域,再根据第二停车区域、第一停车区域以及多个第三位置,确定当前位于第一子区域的第四AGV,最后向第四AGV发送停车指令。Step 520 specifically includes the following steps: according to the fourth position, determine a second parking area in the warehouse with the fourth position as the center and the preset distance as the radius, and then according to the second parking area, the first parking area and a plurality of third positions , determine the fourth AGV currently located in the first sub-area, and finally send a parking instruction to the fourth AGV.
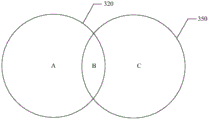
图7为本申请实施例提供的连续两个时刻的停车区域的示意图,如图7所示,第一时刻对应第一停车区域320,第二时刻对应第二停车区域350。第二停车区域350包括与第一停车区域320不重叠的区域C(即第一子区域),以及与第一停车区域320重叠的区域B(即第三子区域)。第一停车区域320包括与第二停车区域350不重叠的区域A(即第二子区域),以及与第二停车区域350重叠的区域B。FIG. 7 is a schematic diagram of a parking area at two consecutive times provided by an embodiment of the present application. As shown in FIG. 7 , the first time corresponds to the
图8为本申请实施例提供的连续两个时刻的仓库俯视图,如图8所示,在第一时刻,控制平台接收到用户持有的移动终端上报的第二位置310,以第二位置310为中心,预设距离r1为半径的第一停车区域320内有两台在线运行的AGV,分别为AGV331和AGV332,控制平台向这两台AGV发送停车指令。在第二时刻,控制平台接收到移动终端上报的第四位置340,以第四位置340为中心、预设距离r1为半径的第二停车区域350内有三台AGV,分别为AGV332、AGV361、AGV362。由于上一时刻控制平台已经向AGV332发送停车指令,因此控制平台可以仅向AGV361和AGV362发送停车指令,减小控制平台的信令消耗。FIG. 8 is a top view of the warehouse at two consecutive times provided by this embodiment of the application. As shown in FIG. 8 , at the first moment, the control platform receives the
可选地,在一些实施例中,控制方法还可以包括如下步骤:Optionally, in some embodiments, the control method may further include the following steps:
控制当前位于第二子区域的第五AGV启动。该示例实现对上一时刻停止的AGV的动态调度,若已停止的AGV不在当前停车区域,控制平台可控制其重新运行,提高系统在线AGV的运行效率。The fifth AGV currently located in the second sub-area is controlled to start. This example implements dynamic scheduling of the AGV that stopped at the last moment. If the stopped AGV is not in the current parking area, the control platform can control it to re-run, improving the operating efficiency of the system's online AGV.
如图8所示,在第一停车区域320中与第二停车区域350不重叠的第二子区域内有一台AGV331,由于AGV331不在当前的第二停车区域350(即更新后的停车区域)内,因此控制平台可以向AGV331发送启动指令。As shown in FIG. 8 , there is an
可选地,在一些实施例中,控制平台在控制当前位于第二子区域的第五AGV运行之前,还可以包括如下步骤:Optionally, in some embodiments, before controlling the operation of the fifth AGV currently located in the second sub-area, the control platform may further include the following steps:
确定位于第二子区域的第五AGV的预设运行路径是否经过当前的第二停车区域。具体的,若第五AGV不经过第二停车区域,向第五AGV发送启动指令。若经过第二停车区域,可以对第五AGV的运行路径进行重新规划,向第五AGV发送新的路径控制指令。It is determined whether the preset running path of the fifth AGV located in the second sub-area passes through the current second parking area. Specifically, if the fifth AGV does not pass through the second parking area, a start instruction is sent to the fifth AGV. If passing through the second parking area, the running path of the fifth AGV can be re-planned, and a new path control instruction can be sent to the fifth AGV.
上述示例实现对已停止AGV的动态调度,基于已停止AGV与当前停车区域的位置关系,控制其继续运行,或按照新的路径控制指令运行,提高系统在线AGV的运行效率。The above example realizes dynamic scheduling of stopped AGVs, and controls the stopped AGVs to continue to run based on the positional relationship between the stopped AGVs and the current parking area, or to run according to new path control instructions to improve the operating efficiency of the system online AGVs.
本实施例提供的AGV的控制方法,通过对连续两个时刻的停车区域的位置分析,根据停车区域的变化,动态调整新旧停车区域中的各个AGV的动作。如果新旧停车区域没有重叠区域,则控制位于新的停车区域内的AGV停车,控制旧的停车区域内的AGV重新启动。如果新旧停车区域存在重叠区域,则控制除重叠区域之外的新的停车区域内的AGV停车,控制除重叠区域之外的旧的停车区域内的AGV重新启动。上述方案实现对AGV的动态调度,提高系统在线AGV的运行效率。The AGV control method provided by this embodiment dynamically adjusts the actions of each AGV in the old and new parking areas according to the changes of the parking areas by analyzing the positions of the parking areas at two consecutive times. If there is no overlapping area between the old and new parking areas, the AGV located in the new parking area is controlled to park, and the AGV in the old parking area is controlled to restart. If there is an overlapping area between the old and new parking areas, control the AGV in the new parking area except the overlapping area to park, and control the AGV in the old parking area except the overlapping area to restart. The above scheme realizes dynamic scheduling of AGVs and improves the operation efficiency of online AGVs in the system.
可选地,在上述各实施例的基础上,若在预设时间段内未接收到移动终端上报的位置更新,控制方法还包括:Optionally, on the basis of the foregoing embodiments, if the location update reported by the mobile terminal is not received within a preset time period, the control method further includes:
向所有在线AGV发送停车指令。Send parking instructions to all online AGVs.
上述示例中,控制平台如果长时间未接收到移动终端的信号,则可以确定移动终端出现故障,为了防止事故发生,控制平台将启动应急响应,控制仓库在线的所有AGV停车,以保证人员的安全。In the above example, if the control platform does not receive a signal from the mobile terminal for a long time, it can be determined that the mobile terminal is faulty. In order to prevent accidents, the control platform will initiate an emergency response and control the parking of all AGVs online in the warehouse to ensure the safety of personnel. .
图9为本申请实施例提供的一种AGV的控制装置的结构示意图。如图9所示,本实施例提供的AGV的控制装置600,包括:FIG. 9 is a schematic structural diagram of an AGV control device according to an embodiment of the present application. As shown in FIG. 9 , the AGV control device 600 provided in this embodiment includes:
接收模块610,用于接收仓库在线的多个AGV在第一时刻上报的多个第一位置,以及进入仓库的用户持有的移动终端在所述第一时刻上报的第二位置;The receiving
处理模块620,用于根据所述多个第一位置和所述第二位置,控制位于第一停车区域内的第一AGV停车,所述第二位置在所述第一停车区域内。The
在一种可能的实施方式中,处理模块620,具体用于:In a possible implementation manner, the
根据所述第二位置确定仓库中以所述第二位置为中心、预设距离为半径的第一停车区域;determining the first parking area in the warehouse with the second position as the center and the preset distance as the radius according to the second position;
根据所述第一停车区域和所述多个第一位置,确定当前位于所述第一停车区域内的第一AGV;determining a first AGV currently located in the first parking area according to the first parking area and the plurality of first positions;
发送模块630,用于向所述第一AGV发送停车指令。The sending
可选地,所述预设距离大于或等于所述AGV的最大停车距离与所述移动终端定位误差值之和。Optionally, the preset distance is greater than or equal to the sum of the maximum parking distance of the AGV and the positioning error value of the mobile terminal.
在一种可能的实施方式中,处理模块620,还用于:In a possible implementation manner, the
根据所述多个第一位置和所述第二位置,控制仓库中第二AGV避开所述第一停车区域,所述第二AGV位于所述第一停车区域之外的预设范围内,且所述第二AGV的预设运行路线经过所述第一停车区域。controlling the second AGV in the warehouse to avoid the first parking area according to the plurality of first positions and the second positions, and the second AGV is located within a preset range outside the first parking area, And the preset running route of the second AGV passes through the first parking area.
在一种可能的实施方式中,处理模块620,具体用于:In a possible implementation manner, the
根据所述第二位置确定仓库中以所述第二位置为中心、预设距离为半径的第一停车区域;determining the first parking area in the warehouse with the second position as the center and the preset distance as the radius according to the second position;
根据所述第一停车区域和所述多个第一位置,确定当前位于所述第一停车区域之外预设范围内的第三AGV,从所述第三AGV中筛选出预设运行路径经过所述第一停车区域的第二AGV;According to the first parking area and the plurality of first positions, a third AGV currently located within a preset range outside the first parking area is determined, and a preset running path is selected from the third AGV to pass through a second AGV in the first parking area;
对所述第二AGV的运行路径进行重新规划;re-plan the running path of the second AGV;
发送模块630,还用于向所述第二AGV发送新的路径控制指令。The sending
在一种可能的实施方式中,接收模块610,还用于:In a possible implementation manner, the receiving
接收仓库在线的多个AGV在第二时刻上报的多个第三位置,以及所述移动终端在所述第二时刻上报的第四位置;Receive multiple third positions reported by multiple AGVs online at the warehouse at the second moment, and the fourth position reported by the mobile terminal at the second moment;
处理模块620,还用于根据所述多个第三位置和所述第四位置,控制位于第二停车区域内的第四AGV停车,所述第四位置在所述第二停车区域内。The
可选地,所述第二停车区域包括与所述第一停车区域不重叠的第一子区域。Optionally, the second parking area includes a first sub-area that does not overlap with the first parking area.
在一种可能的实施方式中,处理模块620,具体用于:In a possible implementation manner, the
根据所述第四位置确定仓库中以所述第四位置为中心、所述预设距离为半径的第二停车区域;determining a second parking area in the warehouse with the fourth position as the center and the preset distance as the radius according to the fourth position;
根据所述第二停车区域、所述第一停车区域以及所述多个第三位置,确定当前位于所述第一子区域的第四AGV;determining a fourth AGV currently located in the first sub-area according to the second parking area, the first parking area, and the plurality of third locations;
发送模块,具体用于向所述第四AGV发送停车指令。The sending module is specifically configured to send a parking instruction to the fourth AGV.
可选地,所述第一停车区域包括与所述第二停车区域不重叠的第二子区域。Optionally, the first parking area includes a second sub-area that does not overlap with the second parking area.
在一种可能的实施方式中,处理模块620,还用于控制当前位于所述第二子区域的第五AGV启动。In a possible implementation manner, the
在一种可能的实施方式中,若在预设时间段内未接收到所述移动终端上报的位置更新,发送模块630,还用于向所有在线AGV发送停车指令。In a possible implementation manner, if the location update reported by the mobile terminal is not received within a preset time period, the sending
本申请实施例提供的AGV的控制装置,用于执行前述任一方法实施例中的技术方案,其实现原理和技术效果类似,在此不再赘述。The AGV control device provided in the embodiment of the present application is used to execute the technical solution in any of the foregoing method embodiments, and the implementation principle and technical effect thereof are similar, and are not repeated here.
需要说明的是,应理解以上装置的各个模块的划分仅仅是一种逻辑功能的划分,实际实现时可以全部或部分集成到一个物理实体上,也可以物理上分开。且这些模块可以全部以软件通过处理元件调用的形式实现;也可以全部以硬件的形式实现;还可以部分模块通过处理元件调用软件的形式实现,部分模块通过硬件的形式实现。例如,处理模块可以为单独设立的处理元件,也可以集成在上述装置的某一个芯片中实现,此外,也可以以程序代码的形式存储于上述装置的存储器中,由上述装置的某一个处理元件调用并执行以上处理模块的功能。其它模块的实现与之类似。此外这些模块全部或部分可以集成在一起,也可以独立实现。这里所述的处理元件可以是一种集成电路,具有信号的处理能力。在实现过程中,上述方法的各步骤或以上各个模块可以通过处理器元件中的硬件的集成逻辑电路或者软件形式的指令完成。It should be noted that it should be understood that the division of each module of the above apparatus is only a division of logical functions, and may be fully or partially integrated into a physical entity in actual implementation, or may be physically separated. And these modules can all be implemented in the form of software calling through processing elements; they can also all be implemented in hardware; some modules can also be implemented in the form of calling software through processing elements, and some modules can be implemented in hardware. For example, the processing module may be a separately established processing element, or may be integrated into a certain chip of the above-mentioned device to be implemented, in addition, it may also be stored in the memory of the above-mentioned device in the form of program code, and a certain processing element of the above-mentioned device Call and execute the function of the above processing module. The implementation of other modules is similar. In addition, all or part of these modules can be integrated together, and can also be implemented independently. The processing element described here may be an integrated circuit with signal processing capability. In the implementation process, each step of the above-mentioned method or each of the above-mentioned modules can be completed by an integrated logic circuit of hardware in the processor element or an instruction in the form of software.
例如,以上这些模块可以是被配置成实施以上方法的一个或多个集成电路,例如:一个或多个特定集成电路(application specific integrated circuit,ASIC),或,一个或多个微处理器(digital signal processor,DSP),或,一个或者多个现场可编程门阵列(field programmable gate array,FPGA)等。再如,当以上某个模块通过处理元件调度程序代码的形式实现时,该处理元件可以是通用处理器,例如中央处理器(centralprocessing unit,CPU)或其它可以调用程序代码的处理器。再如,这些模块可以集成在一起,以片上系统(system-on-a-chip,SOC)的形式实现。For example, the above modules may be one or more integrated circuits configured to implement the above methods, such as: one or more application specific integrated circuits (ASIC), or one or more digital microprocessors (digital) signal processor, DSP), or, one or more field programmable gate array (field programmable gate array, FPGA) and so on. For another example, when one of the above modules is implemented in the form of a processing element scheduling program code, the processing element may be a general-purpose processor, such as a central processing unit (CPU) or other processors that can invoke program codes. For another example, these modules can be integrated together and implemented in the form of a system-on-a-chip (SOC).
图10为本申请实施例提供的一种AGV的控制装置的硬件结构示意图。如图10所示,本实施例提供的AGV的控制装置700,包括:FIG. 10 is a schematic diagram of a hardware structure of an AGV control apparatus provided by an embodiment of the present application. As shown in FIG. 10 , the AGV control device 700 provided in this embodiment includes:
至少一个处理器710(图7中仅示出了一个处理器);以及at least one processor 710 (only one processor is shown in Figure 7); and
与所述至少一个处理器通信连接的存储器720;其中,a
所述存储器720存储有可被所述至少一个处理器710执行的指令,所述指令被所述至少一个处理器710执行,以使控制装置700能够执行前述任一方法实施例中的技术方案。The
可选的,存储器720既可以是独立的,也可以跟处理器710集成在一起。Optionally, the
当存储器720是独立于处理器710之外的器件时,控制装置700还包括:总线730,用于连接存储器720和处理器710。When the
本申请实施例还提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,当所述计算机执行指令被处理器执行时用于实现前述任一方法实施例中的技术方案。Embodiments of the present application further provide a computer-readable storage medium, where computer-executable instructions are stored in the computer-readable storage medium, and when the computer-executable instructions are executed by a processor, are used to implement any of the foregoing method embodiments. Technical solutions.
本申请实施例还提供了一种芯片,包括:处理模块与通信接口,该处理模块能执行前述任一方法实施例中的技术方案。An embodiment of the present application further provides a chip, including: a processing module and a communication interface, where the processing module can execute the technical solutions in any of the foregoing method embodiments.
进一步地,该芯片还包括存储模块(如,存储器),存储模块用于存储指令,处理模块用于执行存储模块存储的指令,并且对存储模块中存储的指令的执行使得处理模块执行前述任一方法实施例中的技术方案。Further, the chip also includes a storage module (eg, memory), the storage module is used for storing instructions, the processing module is used for executing the instructions stored in the storage module, and the execution of the instructions stored in the storage module causes the processing module to execute any of the foregoing. The technical solutions in the method examples.
应理解,上述处理器可以是中央处理单元(英文:Central Processing Unit,简称:CPU),还可以是其他通用处理器、数字信号处理器(英文:Digital Signal Processor,简称:DSP)、专用集成电路(英文:Application Specific Integrated Circuit,简称:ASIC)等。通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器等。结合发明所公开的方法的步骤可以直接体现为硬件处理器执行完成,或者用处理器中的硬件及软件模块组合执行完成。It should be understood that the above processor may be a central processing unit (English: Central Processing Unit, referred to as: CPU), and may also be other general-purpose processors, digital signal processors (English: Digital Signal Processor, referred to as: DSP), application-specific integrated circuits (English: Application Specific Integrated Circuit, referred to as: ASIC) and so on. A general purpose processor may be a microprocessor or the processor may be any conventional processor or the like. The steps of the method disclosed in conjunction with the invention can be directly embodied as executed by a hardware processor, or executed by a combination of hardware and software modules in the processor.
存储器可能包含高速RAM存储器,也可能还包括非易失性存储NVM,例如至少一个磁盘存储器,还可以为U盘、移动硬盘、只读存储器、磁盘或光盘等。The memory may include high-speed RAM memory, and may also include non-volatile storage NVM, such as at least one magnetic disk memory, and may also be a U disk, a removable hard disk, a read-only memory, a magnetic disk or an optical disk, and the like.
总线可以是工业标准体系结构(Industry Standard Architecture,ISA)总线、外部设备互连(Peripheral Component,PCI)总线或扩展工业标准体系结构(ExtendedIndustry Standard Architecture,EISA)总线等。总线可以分为地址总线、数据总线、控制总线等。为便于表示,本申请附图中的总线并不限定仅有一根总线或一种类型的总线。The bus may be an industry standard architecture (Industry Standard Architecture, ISA) bus, a Peripheral Component (Peripheral Component, PCI) bus, or an extended industry standard architecture (Extended Industry Standard Architecture, EISA) bus, or the like. The bus can be divided into address bus, data bus, control bus and so on. For convenience of representation, the buses in the drawings of the present application are not limited to only one bus or one type of bus.
上述存储介质可以是由任何类型的易失性或非易失性存储设备或者它们的组合实现,如静态随机存取存储器(SRAM),电可擦除可编程只读存储器(EEPROM),可擦除可编程只读存储器(EPROM),可编程只读存储器(PROM),只读存储器(ROM),磁存储器,快闪存储器,磁盘或光盘。存储介质可以是通用或专用计算机能够存取的任何可用介质。The above-mentioned storage medium may be implemented by any type of volatile or non-volatile storage device or a combination thereof, such as static random access memory (SRAM), electrically erasable programmable read only memory (EEPROM), erasable Except programmable read only memory (EPROM), programmable read only memory (PROM), read only memory (ROM), magnetic memory, flash memory, magnetic disk or optical disk. A storage medium can be any available medium that can be accessed by a general purpose or special purpose computer.
一种示例性的存储介质耦合至处理器,从而使处理器能够从该存储介质读取信息,且可向该存储介质写入信息。当然,存储介质也可以是处理器的组成部分。处理器和存储介质可以位于专用集成电路(Application Specific Integrated Circuits,简称:ASIC)中。当然,处理器和存储介质也可以作为分立组件存在于控制装置中。An exemplary storage medium is coupled to the processor, such that the processor can read information from, and write information to, the storage medium. Of course, the storage medium can also be an integral part of the processor. The processor and the storage medium may be located in application specific integrated circuits (Application Specific Integrated Circuits, ASIC for short). Of course, the processor and the storage medium may also be present in the control device as discrete components.
最后应说明的是:以上各实施例仅用以说明本申请的技术方案,而非对其限制;尽管参照前述各实施例对本申请进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本申请各实施例技术方案的范围。Finally, it should be noted that the above embodiments are only used to illustrate the technical solutions of the present application, but not to limit them; although the present application has been described in detail with reference to the foregoing embodiments, those of ordinary skill in the art should understand that: It is still possible to modify the technical solutions recorded in the foregoing embodiments, or perform equivalent replacements on some or all of the technical features; and these modifications or replacements do not make the essence of the corresponding technical solutions deviate from the technical solutions of the embodiments of the present application. scope.
Claims (14)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010536360.9A CN112327820B (en) | 2020-06-12 | 2020-06-12 | Automatic guided vehicle AGV control method, device, system and storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010536360.9A CN112327820B (en) | 2020-06-12 | 2020-06-12 | Automatic guided vehicle AGV control method, device, system and storage medium |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN112327820A true CN112327820A (en) | 2021-02-05 |
| CN112327820B CN112327820B (en) | 2025-02-25 |
Family
ID=74304148
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010536360.9A Active CN112327820B (en) | 2020-06-12 | 2020-06-12 | Automatic guided vehicle AGV control method, device, system and storage medium |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112327820B (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113298294A (en) * | 2021-04-30 | 2021-08-24 | 成都飞机工业(集团)有限责任公司 | Logistics path planning method based on intelligent production line |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002132348A (en) * | 2000-10-25 | 2002-05-10 | Dainippon Printing Co Ltd | Automatic guided vehicle collision prevention system |
| EP2330434A1 (en) * | 2009-09-07 | 2011-06-08 | BAE Systems PLC | Saftey system |
| CN106781700A (en) * | 2017-03-21 | 2017-05-31 | 中国矿业大学(北京) | Coal mine underground transport vehicle personnel injure early warning system |
| CN107248250A (en) * | 2017-08-11 | 2017-10-13 | 李易东 | Limit monitoring method and system are invaded in a kind of rail yard construction |
| CN108898832A (en) * | 2018-06-28 | 2018-11-27 | 深圳市口袋网络科技有限公司 | Judgment method, device, terminal and the storage medium of unsafe condition |
| CN208283808U (en) * | 2018-06-26 | 2018-12-25 | 江苏华章物流科技股份有限公司 | A kind of AGV trolley combination anti-collision system |
| CN109298714A (en) * | 2018-11-09 | 2019-02-01 | 浙江国自机器人技术有限公司 | Robot movement control method, system, equipment and computer readable storage medium |
| CN109947102A (en) * | 2019-03-18 | 2019-06-28 | 深兰科技(上海)有限公司 | A kind of mobile device regulation method, terminal and mobile device |
| CN110341695A (en) * | 2018-04-02 | 2019-10-18 | 现代自动车株式会社 | Controller of vehicle, the system and method including the device |
| JP6650988B1 (en) * | 2018-11-14 | 2020-02-19 | 株式会社東芝 | Control system, control method, program, and storage medium |
| US20210263520A1 (en) * | 2018-07-16 | 2021-08-26 | Siemens Mobility GmbH | Method for preventing a collision between an autonomous vehicle and a user in a movement range of the autonomous vehicle and system |
-
2020
- 2020-06-12 CN CN202010536360.9A patent/CN112327820B/en active Active
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002132348A (en) * | 2000-10-25 | 2002-05-10 | Dainippon Printing Co Ltd | Automatic guided vehicle collision prevention system |
| EP2330434A1 (en) * | 2009-09-07 | 2011-06-08 | BAE Systems PLC | Saftey system |
| CN106781700A (en) * | 2017-03-21 | 2017-05-31 | 中国矿业大学(北京) | Coal mine underground transport vehicle personnel injure early warning system |
| CN107248250A (en) * | 2017-08-11 | 2017-10-13 | 李易东 | Limit monitoring method and system are invaded in a kind of rail yard construction |
| CN110341695A (en) * | 2018-04-02 | 2019-10-18 | 现代自动车株式会社 | Controller of vehicle, the system and method including the device |
| CN208283808U (en) * | 2018-06-26 | 2018-12-25 | 江苏华章物流科技股份有限公司 | A kind of AGV trolley combination anti-collision system |
| CN108898832A (en) * | 2018-06-28 | 2018-11-27 | 深圳市口袋网络科技有限公司 | Judgment method, device, terminal and the storage medium of unsafe condition |
| US20210263520A1 (en) * | 2018-07-16 | 2021-08-26 | Siemens Mobility GmbH | Method for preventing a collision between an autonomous vehicle and a user in a movement range of the autonomous vehicle and system |
| CN109298714A (en) * | 2018-11-09 | 2019-02-01 | 浙江国自机器人技术有限公司 | Robot movement control method, system, equipment and computer readable storage medium |
| JP6650988B1 (en) * | 2018-11-14 | 2020-02-19 | 株式会社東芝 | Control system, control method, program, and storage medium |
| CN109947102A (en) * | 2019-03-18 | 2019-06-28 | 深兰科技(上海)有限公司 | A kind of mobile device regulation method, terminal and mobile device |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113298294A (en) * | 2021-04-30 | 2021-08-24 | 成都飞机工业(集团)有限责任公司 | Logistics path planning method based on intelligent production line |
Also Published As
| Publication number | Publication date |
|---|---|
| CN112327820B (en) | 2025-02-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6898394B2 (en) | Vehicle automatic driving control assist method, vehicle automatic driving control assist device, equipment, computer readable storage medium and lane cooperation system | |
| US10802505B2 (en) | Driverless transport system | |
| US11438830B2 (en) | Task execution system, radio connection method, and program | |
| KR20130047544A (en) | Method for controlling at least two robots having respective working spaces including at least one common region | |
| CN110852244A (en) | Vehicle control method, device and computer readable storage medium | |
| CN108027615A (en) | Method and apparatus for running vehicle | |
| EP3570134A1 (en) | System for evacuating one or more mobile robots | |
| JP7761593B2 (en) | Automated guided vehicle, method and system for controlling an automated guided vehicle, and non-transitory computer-readable storage medium | |
| KR20230095588A (en) | Method and system for controlling robot using reinforcement learning based algorithm and path planning based algorithm, and building in which the robot is disposed | |
| JP2715202B2 (en) | Wireless monitoring communication method and apparatus for unmanned self-propelled body | |
| CN116166029A (en) | Multi-AGV navigation method and system compatible with local obstacle avoidance function | |
| KR20120072043A (en) | Apparatus, method and system for automatic vehicle induction | |
| CN115185286A (en) | Autonomous obstacle-detouring planning method for mobile robot and task scheduling system thereof | |
| US20220371589A1 (en) | Vehicle control device and vehicle control method | |
| CN114179078A (en) | A robot control method, device, system and readable storage medium | |
| CN112327820A (en) | Control method, device, system and storage medium for automatic guided vehicle AGV | |
| US11142205B2 (en) | System and method to notify operator of host-vehicle of takeover-event in another-vehicle | |
| KR20240039826A (en) | Heterogeneous logistics robots integrated operation system and method therefor | |
| CN118295387A (en) | AGV vehicle scheduling method, system and computer readable storage medium | |
| JP7669804B2 (en) | ROBOT CONTROL SYSTEM, INFORMATION PROCESSING APPARATUS, INFORMATION PROCESSING METHOD, AND PROGRAM | |
| US11835949B2 (en) | Autonomous device safety system | |
| CN112433199B (en) | Fault detection method and device for safety sensor | |
| CN108675145B (en) | Anti-collision method and device for crane, crane and storage medium | |
| CN116048018B (en) | Cross-building scheduling method and device for robot, terminal equipment and storage medium | |
| CN207164592U (en) | A kind of mobile robot collision avoidance system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |