CN112232161B - Complex motion continuous estimation method based on electromyography mapping model switching - Google Patents
Complex motion continuous estimation method based on electromyography mapping model switching Download PDFInfo
- Publication number
- CN112232161B CN112232161B CN202011066204.7A CN202011066204A CN112232161B CN 112232161 B CN112232161 B CN 112232161B CN 202011066204 A CN202011066204 A CN 202011066204A CN 112232161 B CN112232161 B CN 112232161B
- Authority
- CN
- China
- Prior art keywords
- model
- estimation
- lstm
- joint angle
- signals
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2218/00—Aspects of pattern recognition specially adapted for signal processing
- G06F2218/12—Classification; Matching
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/044—Recurrent networks, e.g. Hopfield networks
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/045—Combinations of networks
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/049—Temporal neural networks, e.g. delay elements, oscillating neurons or pulsed inputs
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2218/00—Aspects of pattern recognition specially adapted for signal processing
- G06F2218/02—Preprocessing
- G06F2218/04—Denoising
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Artificial Intelligence (AREA)
- General Engineering & Computer Science (AREA)
- General Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Data Mining & Analysis (AREA)
- Evolutionary Computation (AREA)
- Biophysics (AREA)
- Molecular Biology (AREA)
- Computing Systems (AREA)
- Computational Linguistics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Mathematical Physics (AREA)
- Software Systems (AREA)
- Health & Medical Sciences (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Signal Processing (AREA)
- Measurement And Recording Of Electrical Phenomena And Electrical Characteristics Of The Living Body (AREA)
- Image Analysis (AREA)
Abstract
本发明公开一种基于肌电映射模型切换的复杂运动连续估计方法,属于人机交互领域,先根据待估计的关节角度以及对应关节运动的表层肌肉,采集关节角度信号以及多通道肌电信号,根据复杂任务的特性将任务分成多个子任务,然后,对采集的肌电信号和关节角度信号分别进行预处理,采用LSTM深度学习网络建立肌电信号和关节角度信号的映射子关系,得到估计子模型,接着,使用RF集成学习算法对肌电信号与各个估计子模型之间建立映射关系,得到RF切换模型,利用RF切换模型对肌电信号特征进行分类,判断当前运动所属的估计子模型,最后,将肌电特征输入相应的估计子模型获取关节角度估计值。本发明有效提高了复杂任务下的各关节角度估计精度。
The invention discloses a complex motion continuous estimation method based on myoelectric mapping model switching, which belongs to the field of human-computer interaction. First, according to the joint angle to be estimated and the surface muscles corresponding to the joint movement, joint angle signals and multi-channel myoelectric signals are collected. According to the characteristics of complex tasks, the task is divided into multiple subtasks, and then the collected EMG signals and joint angle signals are preprocessed respectively, and the LSTM deep learning network is used to establish the mapping sub-relationship between EMG signals and joint angle signals, and the estimator is obtained. Model, then, use the RF integrated learning algorithm to establish a mapping relationship between the EMG signal and each estimated sub-model, obtain the RF switching model, use the RF switching model to classify the EMG signal features, and determine the estimated sub-model to which the current motion belongs, Finally, the EMG features are input into the corresponding estimation sub-model to obtain the joint angle estimation. The invention effectively improves the estimation accuracy of each joint angle under complex tasks.
Description
技术领域technical field
本发明属于人机交互领域,更具体地,涉及一种基于肌电映射模型切换的复杂运动连续估计方法。The invention belongs to the field of human-computer interaction, and more specifically relates to a complex motion continuous estimation method based on myoelectric mapping model switching.
背景技术Background technique
目前,肌电接口是临床上唯一可行的一种神经接口形式。其使用表层肌肉肌电信号作为信号源来估计人体各个关节的运动,这已经成为临床上切实可行的一种方案,但是,真正投入应用的仅仅是基于肌电信号的运动模式识别。基于肌电信号的运动连续估计并控制外部设备(如机械手、机械臂、外骨骼)已有许多学者投入了大量的研究并取得一定的成果,但距离真正投入临床应用仍然存在许多问题,其中一个主要问题就是肌电控制的外部设备的功能无法适应现实生活中的复杂任务——例如我们能够轻松的调配上肢各个关节完成伸臂(手达到水杯位置),抓握(手指抓握水杯),屈臂(拿回水杯),抬臂翻腕(喝水)等一系列的动作,完成喝水这个任务。但是,这一系列动作涉及多个关节在时间空间上的精准配合、调度。再比如,日常生活中我们有时需要抓握纸杯这样柔软且轻的物体,有时需要抓握锅柄这样比较硬且重的物体,我们会自适应根据抓握物体的不同使用不同大小的力进行抓握。Currently, the EMG interface is the only clinically feasible form of neural interface. It uses the surface muscle electromyography signal as a signal source to estimate the movement of each joint of the human body, which has become a clinically feasible solution, but what is really put into application is only the motion pattern recognition based on the electromyography signal. The continuous motion estimation and control of external devices (such as manipulators, manipulators, and exoskeletons) based on electromyographic signals have been invested in a lot of research and achieved certain results, but there are still many problems in the actual clinical application. One of them is The main problem is that the functions of external devices controlled by myoelectricity cannot adapt to complex tasks in real life-for example, we can easily deploy various joints of the upper limbs to complete arm extension (hand reaches the position of the water cup), grasp (finger grasps the water cup), flexion, etc. A series of actions such as raising the arm (taking back the water cup), raising the arm and turning the wrist (drinking water), etc., complete the task of drinking water. However, this series of actions involves the precise coordination and scheduling of multiple joints in time and space. For another example, in daily life, we sometimes need to grasp soft and light objects such as paper cups, and sometimes we need to grasp relatively hard and heavy objects such as pot handles. We will adaptively use different sizes of force to grasp according to the different grasping objects grip.
上述任务中涉及到力、姿态、速度等因素的变化会使得任务变得复杂,特别是对于使用肌电信号对任务进行连续估计就变得异常困难,与此同时在复杂任务中人体在不同的时间或空间激活不同的肌肉群驱动不同的关节运动,其本身各个阶段肌电信号与关节运动之间的映射关系就是不同的。由此可知,使用单一的估计模型建立肌电信号与上述复杂任务的关节角度的映射关系往往得不到好的结果,模型鲁棒性较差,无法顺利完成整个任务的精准估计。Changes in factors such as force, posture, and speed involved in the above tasks will make the task more complicated, especially for the continuous estimation of the task using EMG signals. Different muscle groups are activated in time or space to drive different joint movements, and the mapping relationship between EMG signals and joint movements at each stage is different. It can be seen that using a single estimation model to establish the mapping relationship between the EMG signal and the joint angles of the above-mentioned complex tasks often fails to obtain good results, and the model is not robust enough to successfully complete the accurate estimation of the entire task.
因此,需要开发一种新型的复杂运动连续估计方法,以能顺利完成复杂任务的精准估计。Therefore, it is necessary to develop a new complex motion continuous estimation method to successfully complete the accurate estimation of complex tasks.
发明内容Contents of the invention
针对现有技术的缺陷和改进需求,本发明的目的在于提供一种基于肌电映射模型切换的复杂运动连续估计方法,旨在解决现有技术中存在无法连续估计复杂任务的技术问题。In view of the defects and improvement needs of the prior art, the purpose of the present invention is to provide a complex motion continuous estimation method based on EMG model switching, which aims to solve the technical problem in the prior art that complex tasks cannot be continuously estimated.
为实现上述目的,本发明提供了一种基于肌电映射模型切换的复杂运动连续估计方法,其包括如下步骤:In order to achieve the above object, the present invention provides a complex motion continuous estimation method based on myoelectric mapping model switching, which includes the following steps:
S1:根据待估计的关节角度以及驱动对应关节运动的表层肌肉,采集关节角度信号以及多通道肌电信号,根据复杂任务的特性将任务分成多个子任务,多个子任务组合成整个复杂任务,S1: According to the joint angle to be estimated and the superficial muscles that drive the corresponding joint movement, collect joint angle signals and multi-channel EMG signals, divide the task into multiple subtasks according to the characteristics of the complex task, and combine multiple subtasks into the entire complex task.
S2:对采集的肌电信号和关节角度信号分别进行预处理,S2: Preprocessing the collected EMG signals and joint angle signals respectively,
S3:利用预处理后的肌电信号和关节角度信号,采用LSTM深度学习网络建立肌电信号和关节角度信号的映射子关系,得到估计子模型,S3: Using the preprocessed myoelectric signal and joint angle signal, the LSTM deep learning network is used to establish the mapping sub-relationship between the myoelectric signal and the joint angle signal, and the estimation sub-model is obtained.
S4:使用RF集成学习算法对肌电信号与各个估计子模型之间建立映射关系,得到RF切换模型,S4: Use the RF integrated learning algorithm to establish a mapping relationship between the EMG signal and each estimated sub-model to obtain the RF switching model,
S5:利用RF切换模型对肌电信号特征进行分类,判断当前运动所属的估计子模型,然后将肌电特征输入相应的估计子模型获取此时的关节角度估计值。S5: Use the RF switching model to classify the EMG signal features, determine the estimation sub-model to which the current motion belongs, and then input the EMG features into the corresponding estimation sub-model to obtain the estimated value of the joint angle at this time.
进一步的,步骤S2中,对肌电信号进行预处理包括肌电信号的滤波、特征提取和归一化,具体为,对肌电信号进行陷波滤波处理以消除工频干扰,还对肌电信号进行20Hz~460Hz的带通滤波处理以消除低频噪声和高频噪声,对经过降噪处理的肌电信号进行特征提取,采用滑动窗的方法对肌电信号取特征值,得到肌电特征之后按照各通道特征值的最大值、最小值分别对各通道肌电特征进行归一化,得到各通道归一化之后的肌电特征。Further, in step S2, the preprocessing of the electromyographic signal includes filtering, feature extraction and normalization of the electromyographic signal, specifically, performing notch filter processing on the electromyographic signal to eliminate power frequency interference, and further processing the electromyographic signal The signal is subjected to 20Hz-460Hz band-pass filter processing to eliminate low-frequency noise and high-frequency noise, and feature extraction is performed on the EMG signal after noise reduction processing, and the sliding window method is used to obtain the eigenvalue of the EMG signal, and after the EMG feature is obtained The myoelectric characteristics of each channel are normalized according to the maximum value and the minimum value of the characteristic value of each channel, and the normalized myoelectric characteristics of each channel are obtained.
进一步的,步骤S2中,对关节角度信号进行预处理是指,对实测关节角度信号与估计关节角度信号分别进行滤波处理,使实测关节角度与估计关节角度以相对平滑的角度输入、输出到相应模型。Further, in step S2, preprocessing the joint angle signal refers to performing filtering processing on the measured joint angle signal and the estimated joint angle signal respectively, so that the measured joint angle and the estimated joint angle are input and output to the corresponding joint angle at a relatively smooth angle. Model.
进一步的,步骤S3中,得到的估计子模型为LSTM估计子模型,获得LSTM估计子模型的具体过程为:首先,初始化LSTM深度学习网络的参数,将候选态的权重矩阵WC和偏置bC、输入门的权重矩阵Wi和偏置bi、遗忘门的权重矩阵Wf和偏置bf、输出门的权重矩阵Wo和偏置bo初始化为0~1之间的随机数,设置LSTM深度学习网络的输入层神经元个数为M,层数设置为i,每一层的输出作为下一层的输入,LSTM网络初始化完成之后,对LSTM网络进行训练,将预处理之后的肌电信号以及关节角度信号输入LSTM模型,采用反向传播算法对上述多个权重矩阵和多个偏置进行优化,得到LSTM估计子模型。Further, in step S3, the estimated sub-model obtained is the LSTM estimated sub-model, and the specific process of obtaining the LSTM estimated sub-model is as follows: first, initialize the parameters of the LSTM deep learning network, and set the weight matrix W C and bias b of the candidate state C. The weight matrix W i and bias b i of the input gate, the weight matrix W f and bias b f of the forget gate, the weight matrix W o and the bias b o of the output gate are initialized to random numbers between 0 and 1 , set the number of neurons in the input layer of the LSTM deep learning network to M, the number of layers to i, and the output of each layer is used as the input of the next layer. After the initialization of the LSTM network is completed, the LSTM network is trained, and the preprocessed The myoelectric signal and joint angle signal of the input LSTM model, using the backpropagation algorithm to optimize the above multiple weight matrices and multiple offsets, to obtain the LSTM estimation sub-model.
进一步的,步骤S5中,使用RF集成学习算法对肌电信号与各个LSTM估计子模型之间建立映射关系,得到RF切换模型,具体为:将预处理之后的肌电信号以及所对应的LSTM模型的标签作为输入,训练获得RF切换模型,RF切换模型的输出为LSTM估计子模型的标签,LSTM模型的标签为数字1~n,共生成n个LSTM估计子模型。Further, in step S5, the RF integrated learning algorithm is used to establish a mapping relationship between the EMG signal and each LSTM estimation sub-model to obtain the RF switching model, specifically: the preprocessed EMG signal and the corresponding LSTM model The label of the LSTM model is used as input, and the RF switching model is obtained through training. The output of the RF switching model is the label of the LSTM estimation sub-model. The label of the LSTM model is the
进一步的,关节角度信号中所述关节为人体复合关节如人手各个关节、肩肘关节等,多通道肌电信号为驱动复合关节运动的相关表层肌肉所产生的肌电信号,肌电信号通道数的选取根据需要估计的复合关节角度目标确定。Further, the joints described in the joint angle signal are compound joints of the human body such as various joints of the human hand, shoulder and elbow joints, etc., and the multi-channel electromyographic signal is the electromyographic signal generated by the relevant superficial muscles that drive the movement of the compound joint. The number of channels of the electromyographic signal is Select Target determination based on the compound joint angles that need to be estimated.
进一步的,还包括步骤S6,步骤S6为:采用皮尔森相关系数以及均方根误差作为实测关节角度和估计关节角度的评价指标,以评价估计关节角度的估计精度。Further, step S6 is also included, and step S6 is: using the Pearson correlation coefficient and the root mean square error as the evaluation indexes of the measured joint angle and the estimated joint angle, so as to evaluate the estimation accuracy of the estimated joint angle.
总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下有益效果:Generally speaking, compared with the prior art, the above technical solution conceived by the present invention has the following beneficial effects:
本发明利用LSTM深度学习网络对于肌电信号中长期记忆性强的优势,提高了单个估计子模型的估计精度。采用模型切换机制,解决了在复杂任务中单一模型无法准确估计的缺陷,实现复杂任务下的精准估计。实验结果表明,本发明有效提高了复杂任务下的各关节角度估计精度。The invention utilizes the advantage of the LSTM deep learning network for the strong long-term memory of the electromyographic signal, and improves the estimation accuracy of a single estimation sub-model. The model switching mechanism is adopted to solve the defect that a single model cannot be accurately estimated in complex tasks, and realize accurate estimation under complex tasks. Experimental results show that the present invention effectively improves the estimation accuracy of each joint angle under complex tasks.
附图说明Description of drawings
图1是本发明基于肌电映射模型切换的复杂运动连续估计方法的实现流程图;Fig. 1 is the realization flowchart of the complex motion continuous estimation method based on myoelectric mapping model switching of the present invention;
图2是本发明采用的LSTM深度学习网络的原理示意图;Fig. 2 is the principle schematic diagram of the LSTM deep learning network that the present invention adopts;
图3是本发明采用的RF切换模型的原理示意图;Fig. 3 is the schematic diagram of the principle of the RF switching model adopted by the present invention;
图4是本发明LSTM子模型应用于五个手指的估计精度曲线图;Fig. 4 is the estimation accuracy curve chart that LSTM sub-model of the present invention is applied to five fingers;
图5是本发明使用结合模型切换机制的LSTM混合估计模型与单一的LSTM子模型在复杂抓握任务时的估计精度对比曲线图。Fig. 5 is a comparison graph of the estimation accuracy between the LSTM hybrid estimation model combined with the model switching mechanism and the single LSTM sub-model in complex grasping tasks according to the present invention.
具体实施方式Detailed ways
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
本发明涉及一种基于肌电信号结合模型切换机制与LSTM深度学习网络在复杂任务下的复合运动连续估计方法。提出结合模型切换机制的LSTM混合估计模型实现复杂任务下的人体关节复合运动连续估计。LSTM在处理时间序列问题上具有很大的优势,引入细胞态保存长期记忆,改进了RNN循环神经网络只能保存短期记忆的缺陷。使用LSTM深度学习网络构建肌电信号与人体关节运动之间的映射模型能够相较于其他机器学习提高估计精度。The invention relates to a compound motion continuous estimation method under complex tasks based on an electromyographic signal combined with a model switching mechanism and an LSTM deep learning network. A LSTM hybrid estimation model combined with a model switching mechanism is proposed to realize continuous estimation of human joint compound motion under complex tasks. LSTM has great advantages in dealing with time series problems. The introduction of cell state to save long-term memory improves the defect that RNN cyclic neural network can only save short-term memory. Using LSTM deep learning network to build a mapping model between EMG signals and human joint motion can improve the estimation accuracy compared with other machine learning.
具体的,针对现实生活中不同的任务情景,根据任务复杂特性将任务分成多个子任务,比如分解成n个任务,不同的子任务分别使用LSTM深度学习网络进行训练得到多个LSTM估计子模型。使用随机森林(RF)集成学习算法对肌电信号与其所属的LSTM估计子模型进行训练,得到切换模型。Specifically, for different task scenarios in real life, the task is divided into multiple sub-tasks according to the complex characteristics of the task, such as decomposing into n tasks, and different sub-tasks are trained using the LSTM deep learning network to obtain multiple LSTM estimation sub-models. The random forest (RF) ensemble learning algorithm is used to train the EMG signal and its LSTM estimation sub-model to obtain the switching model.
本发明采取的技术方案包括如下步骤:The technical scheme that the present invention takes comprises the steps:
S1:根据待估计的关节角度以及驱动对应关节运动的表层肌肉,采集关节角度信号以及多通道肌电信号。根据复杂任务的特性将任务分成多个子任务,多个子任务组合成整个复杂任务。根据复杂任务分解出的n个子任务的需求选取多自由度人体关节角度作为估计目标,采集多通道肌电信号作为系统输入。S1: Collect joint angle signals and multi-channel EMG signals according to the joint angles to be estimated and the superficial muscles that drive the corresponding joint movements. According to the characteristics of the complex task, the task is divided into multiple subtasks, and the multiple subtasks are combined into the whole complex task. According to the requirements of n subtasks decomposed from the complex task, the multi-degree-of-freedom human joint angle is selected as the estimation target, and the multi-channel EMG signal is collected as the system input.
S2:对肌电信号进行预处理,包括肌电信号的滤波、特征提取、归一化。具体的,由于表面肌电信号过于微弱容易受到周围电磁场的干扰,在实际测量肌电信号的过程中容易受到关节角度测量设备以及其他电气设备的工频干扰,干扰频率分布为50Hz及其整数倍频率。因此,需要对肌电信号进行消除工频干扰处理。根据肌电信号所处的主要频率进行带通滤波处理以消除运动伪迹噪声(低频)以及其他高频噪声。对经过降噪处理过的肌电信号进行特征提取,根据不同的任务选取不同的单一特征或组合特征,如均方根(RMS)、波形长度(WL)、绝对值积分平均值(IAV)、平均绝对值(MAV)、过零点系数(ZC)、斜率符号变化(SSC)和平均振幅变化率(AAC)等。按照各通道特征值的最大值、最小值分别对各通道肌电特征进行归一化,得到各通道归一化之后的肌电特征作为RF切换模型和LSTM模型输入信号。S2: Preprocessing the EMG signal, including filtering, feature extraction, and normalization of the EMG signal. Specifically, because the surface electromyography signal is too weak to be interfered by the surrounding electromagnetic field, in the process of actually measuring the electromyography signal, it is easy to be interfered by the power frequency of the joint angle measurement equipment and other electrical equipment, and the interference frequency distribution is 50Hz and its integer multiples frequency. Therefore, it is necessary to eliminate power frequency interference on the EMG signal. Bandpass filtering is performed according to the main frequency of the EMG signal to eliminate motion artifact noise (low frequency) and other high frequency noise. Feature extraction is performed on the noise-reduced EMG signal, and different single features or combined features are selected according to different tasks, such as root mean square (RMS), waveform length (WL), absolute value integral average (IAV), Mean absolute value (MAV), zero-crossing coefficient (ZC), slope sign change (SSC) and average amplitude change rate (AAC), etc. The EMG features of each channel were normalized according to the maximum and minimum eigenvalues of each channel, and the normalized EMG features of each channel were obtained as the input signals of the RF switching model and the LSTM model.
对关节角度信号进行预处理,对实测关节角度信号与估计关节角度信号进行滤波处理,使关节角度以相对平滑的角度输入、输出到模型。The joint angle signal is preprocessed, and the measured joint angle signal and the estimated joint angle signal are filtered, so that the joint angle is input and output to the model at a relatively smooth angle.
S3:将每个子任务的肌电特征以及对应关节角度信号作为输入分别训练LSTM估计子模型。S3: The EMG features of each subtask and the corresponding joint angle signals are used as input to train the LSTM estimation submodel respectively.
初始化LSTM深度学习网络的参数:将候选态的权重矩阵WC和偏置bC、输入门的权重矩阵Wi和偏置bi、遗忘门的权重矩阵Wf和偏置bf、输出门的权重矩阵Wo和偏置bo初始化为0~1之间的随机数。设置LSTM深度学习网络的输入层神经元个数为M,层数设置为i,每一层的输出作为下一层的输入。Initialize the parameters of the LSTM deep learning network: the weight matrix W C and bias b C of the candidate state, the weight matrix W i and bias b i of the input gate, the weight matrix W f and bias b f of the forget gate, and the output gate The weight matrix W o and bias b o are initialized as random numbers between 0 and 1. The number of neurons in the input layer of the LSTM deep learning network is set to M, the number of layers is set to i, and the output of each layer is used as the input of the next layer.
LSTM网络初始化完成之后对LSTM网络进行训练,将预处理之后的肌电信号以及关节角度信号输入LSTM模型,采用反向传播算法对上述权重矩阵和偏置进行优化,得到LSTM估计子模型。LSTM模型也即LSTM网络。After the LSTM network initialization is completed, the LSTM network is trained, and the preprocessed EMG signal and joint angle signal are input into the LSTM model, and the backpropagation algorithm is used to optimize the above weight matrix and bias to obtain the LSTM estimation sub-model. The LSTM model is also the LSTM network.
其中设置训练迭代次数为epoch,损失函数为loss,优化器为optimizer,一次训练所选取的样本数为batch size。Among them, set the number of training iterations as epoch, the loss function as loss, the optimizer as optimizer, and the number of samples selected for one training as batch size.
S4:训练RF切换模型,将预处理之后的肌电信号以及所对应的LSTM模型的标签作为模型输入以训练RF切换模型,RF切换模型的输出为LSTM估计子模型的标签。对输入样本进行bootstrap抽样得到k个样本集,分别对这k个样本集使用决策树模型进行训练得到k个树分类器,其中,LSTM模型的标签为数字1~n,共生成n个LSTM估计子模型,每个树分类器的最大深度设置成m,判断节点是否继续分裂采用gini函数的计算方法,节点分裂所需的最小样本数设置为f,不限制最大叶节点数,节点分裂时参与判断的最大特征数等于所有特征数。S4: Training the RF switching model, the preprocessed EMG signal and the label of the corresponding LSTM model are used as model input to train the RF switching model, and the output of the RF switching model is the label of the LSTM estimation sub-model. Perform bootstrap sampling on the input samples to obtain k sample sets, respectively use the decision tree model to train the k sample sets to obtain k tree classifiers, in which the labels of the LSTM model are
S5:训练好RF切换模型以及各个LSTM估计子模型之后,整个结合模型切换机制的LSTM混合估计模型就训练完成了,测试阶段使用此混合模型对新输入肌电信号数据进行复杂任务下的运动连续估计。特别的,估计阶段使用训练阶段各通道肌电特征最大值最小值对各通道肌电特征进行归一化,将归一化的肌电特征输入RF切换模型,输出对应肌电信号所属的LSTM估计子模型,然后归一化的肌电特征输入对应的LSTM估计子模型进行估计,输出各关节角度估计值。S5: After training the RF switching model and each LSTM estimation sub-model, the entire LSTM hybrid estimation model combined with the model switching mechanism is trained. In the test phase, this hybrid model is used to perform continuous motion under complex tasks on the new input EMG data. estimate. In particular, in the estimation phase, the maximum and minimum values of the EMG features of each channel in the training phase are used to normalize the EMG features of each channel, and the normalized EMG features are input into the RF switching model, and the LSTM estimation corresponding to the EMG signal is output. sub-model, and then the normalized EMG features are input to the corresponding LSTM estimation sub-model for estimation, and the estimated value of each joint angle is output.
在实际工程实践中,会对本发明提出的结合模型切换机制的LSTM混合估计模型在复杂任务下的复合运动连续估计效果进行评估,评估时,首先,评估单一的LSTM模型在各个估计子模型中的估计精度以验证各个估计子模型的估计精度,其次对比使用单一LSTM模型与结合模型切换机制的LSTM混合估计模型在复杂任务下的估计效果比较,以验证结合模型切换机制的LSTM混合估计模型是否能更好的适应任务情景的变化,对复杂任务的估计具有更高的估计精度以及鲁棒性。评价指标为皮尔森相关系数(CC)以及均方根误差(RMSE)。结果表明,本发明方法能够有效提高了复杂任务下的各关节角度估计精度。In actual engineering practice, the compound motion continuous estimation effect of the LSTM hybrid estimation model combined with the model switching mechanism proposed in the present invention will be evaluated under complex tasks. When evaluating, first, evaluate the performance of a single LSTM model in each estimation sub-model Estimate the accuracy to verify the estimation accuracy of each estimation sub-model, and then compare the estimation effect of the single LSTM model and the LSTM hybrid estimation model combined with the model switching mechanism under complex tasks to verify whether the LSTM hybrid estimation model combined with the model switching mechanism can It better adapts to changes in task scenarios, and has higher estimation accuracy and robustness for complex task estimation. The evaluation indicators are Pearson's correlation coefficient (CC) and root mean square error (RMSE). The results show that the method of the invention can effectively improve the estimation accuracy of each joint angle under complex tasks.
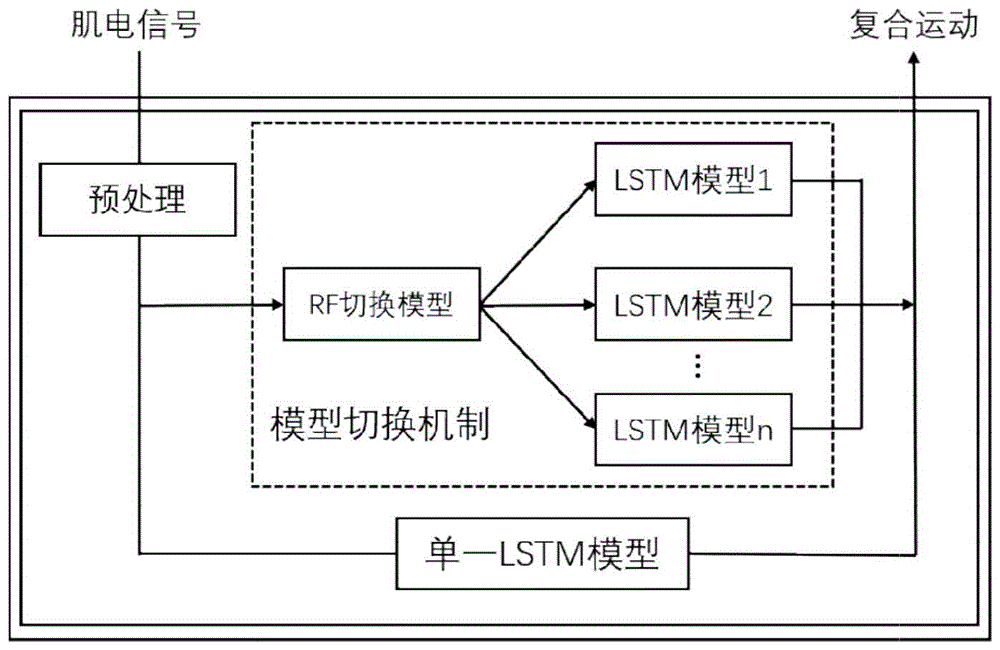
本发明在估计时的整个流程图如图1所示,肌电信号首先经过预处理得到肌电特征,肌电特征输入RF切换模型得到分类结果,输出LSTM估计子模型的标签,然后肌电特征进入对应LSTM估计子模型输出估计复合运动角度。由于需要进行结果的对比,肌电信号经过预处理之后得到的特征值也会直接经过单一的LSTM模型直接得到复合运动角度输出。两个模型分别得到的角度输出会在CC、RMSE两个维度上做对比,以突出结合模型切换机制的LSTM混合估计模型在复杂任务下的良好估计效果。The whole flow chart of the present invention when estimating is shown in Figure 1. The myoelectric signal is first preprocessed to obtain the myoelectric feature, and the myoelectric feature is input into the RF switching model to obtain the classification result, and the label of the LSTM estimation sub-model is output, and then the myoelectric feature Enter the corresponding LSTM estimation sub-model to output the estimated compound motion angle. Due to the need to compare the results, the eigenvalues obtained after the EMG signal is preprocessed will also directly pass through a single LSTM model to directly obtain the compound motion angle output. The angle outputs obtained by the two models will be compared in the two dimensions of CC and RMSE to highlight the good estimation effect of the LSTM hybrid estimation model combined with the model switching mechanism under complex tasks.
下面结合附图和具体实施例,对本发明做进一步的详细描述。特别的,具体实施例所包含的复杂任务为日常生活中人们需要使用不同的力对不同的物体进行抓握,例如抓握纸杯时需要保证抓握时使用较小的力,对于抓握锅柄以拿起烹饪锅时需要使用较大的力,而平常生活中拿一瓶水则只需要适中的力。The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments. In particular, the complex task included in the specific embodiment is that people need to use different forces to grasp different objects in daily life, for example, when grasping a paper cup, it is necessary to ensure that a small force is used when grasping, and for grasping a pot handle So when you pick up a cooking pot, you need to use a lot of force, but you only need moderate force to hold a bottle of water in daily life.
(1)根据复杂任务的特性将任务分成多个子任务,多个子任务组合成整个复杂任务。根据上述日常生活情境中对于不同的物体人们会采取不同的力进行抓握的特性,选取五自由度人手关节角度作为估计目标、六通道肌电信号作为系统输入。五自由度人手关节分别为拇指掌指关节、食指掌指关节、中指掌指关节、无名指掌指关节、小拇指掌指关节。所选六通道肌肉信号分别为拇长屈肌,指浅屈肌,指深屈肌,指伸肌,示指伸肌,拇长伸肌。根据待估计的关节角度以及驱动对应关节运动的表层肌肉,采集关节角度信号以及多通道肌电信号。(1) According to the characteristics of the complex task, the task is divided into multiple subtasks, and the multiple subtasks are combined into the whole complex task. According to the characteristics that people will use different forces to grasp different objects in the above-mentioned daily life situations, the five-degree-of-freedom human hand joint angle is selected as the estimation target, and the six-channel EMG signal is used as the system input. The five-degree-of-freedom human hand joints are the metacarpophalangeal joint of the thumb, the metacarpophalangeal joint of the index finger, the metacarpophalangeal joint of the middle finger, the metacarpophalangeal joint of the ring finger, and the metacarpophalangeal joint of the little finger. The selected six-channel muscle signals are flexor hallucis longus, flexor digitorum superficiale, flexor digitorum deep, extensor digitorum, extensor digitorum longus, and extensor hallucis longus. According to the joint angle to be estimated and the superficial muscles that drive the corresponding joint movement, the joint angle signal and the multi-channel EMG signal are collected.
(2)对肌电信号进行预处理,包括肌电信号的滤波、特征提取、归一化。(2) Preprocessing the EMG signal, including filtering, feature extraction, and normalization of the EMG signal.
(2a)滤波:由于表面肌电信号过于微弱容易受到周围电磁场的干扰,在实际测量肌电信号的过程中受到了手指角度测量设备以及其他电气设备的工频干扰,干扰频率分布为50Hz及其整数倍频率。因此,对肌电信号进行了陷波滤波处理(Comb-Notching Filter)以消除工频干扰。由于肌电信号的主要频率集中在20~460Hz,对肌电信号进行20~460Hz的带通滤波处理以消除运动伪迹噪声(低频)以及其他高频噪声。(2a) Filtering: Since the surface electromyography signal is too weak to be interfered by the surrounding electromagnetic field, in the process of actually measuring the electromyography signal, it is subjected to power frequency interference from finger angle measurement equipment and other electrical equipment, and the interference frequency distribution is 50Hz and above. Integer multiple frequency. Therefore, a notch filter (Comb-Notching Filter) was performed on the EMG signal to eliminate power frequency interference. Since the main frequency of EMG is concentrated at 20-460 Hz, the EMG signal is processed by band-pass filtering at 20-460 Hz to eliminate motion artifact noise (low frequency) and other high-frequency noise.
(2b)对经过降噪处理过的肌电信号进行特征提取,复杂情境任务中主要变化因素为力,肌电信号的平均绝对值特征表征肌肉的活动水平的大小从而能一定程度反应抓握力的大小,因此选取平均绝对值(MAV)作为特征。采用滑动窗的方法对肌电信号取特征值,滑动窗口的大小设置为200ms,每次向后滑动50ms,相邻的窗口之间具有75%的重叠数据。(2b) Feature extraction is performed on the noise-reduced EMG signal. The main change factor in complex situational tasks is force. The average absolute value feature of the EMG signal represents the activity level of the muscle, which can reflect the grip force to a certain extent. size, so the mean absolute value (MAV) is chosen as the feature. The sliding window method is used to obtain the eigenvalues of the EMG signal. The size of the sliding window is set to 200ms, and each time slides backward for 50ms. There is 75% overlapping data between adjacent windows.
(2c)得到肌电特征之后按照各通道特征值的最大值、最小值分别对各通道肌电特征进行归一化,得到各通道归一化之后的肌电特征作为后续的RF切换模型和LSTM模型(后续两个模型)输入信号。(2c) After obtaining the myoelectric features, normalize the myoelectric features of each channel according to the maximum and minimum values of the feature values of each channel, and obtain the normalized myoelectric features of each channel as the subsequent RF switching model and LSTM model (the next two models) input signal.
对五自由度手指掌指关节角度信号进行预处理,对实测角度信号进行Butterworth低通滤波处理(截止频率2Hz,4阶),使关节角度以相对平滑的角度输入LSTM估计模型。The five-degree-of-freedom finger metacarpophalangeal joint angle signal is preprocessed, and the measured angle signal is subjected to Butterworth low-pass filtering (cutoff frequency 2Hz, 4th order), so that the joint angle can be input into the LSTM estimation model at a relatively smooth angle.
(3)根据任务复杂程度将任务分成3个子任务,分别为任务一:以较小的力抓握物体,任务二:以适中的力抓握物体,任务三:以较大的力抓握物体。每个子任务的肌电特征以及对应关节角度信号作为输入分别训练LSTM估计子模型,即训练三个不同等级力对应的三个LSTM估计子模型。单个LSTM深度学习网络原理示意图如图2所示,在训练每个模型时,将预处理之后的肌电信号与关节角度信号输入到LSTM深度学习网络中的输入门,遗忘门,输出门和候选态中,得到t时刻的LSTM深度学习网络的候选态的输出值
it=σ(Wi·[ht-1,xt]+bi)i t =σ(W i ·[h t-1 ,x t ]+b i )
ft=σ(Wf·[ht-1,xt]+bf)f t =σ(W f ·[h t-1 ,x t ]+b f )
ot=σ(Wo·[ht-1,xt]+bo)o t =σ(W o ·[h t-1 ,x t ]+b o )

ht=ot*tanh(Ct)h t =o t *tanh(C t )

其中,xt为经过预处理之后的肌电信号,代表模型的输入。WC和bC分别表示候选态的权重矩阵和偏置,Wi和bi分别表示输入门的权重矩阵和偏置,Wf和bf分别表示遗忘门的权重矩阵和偏置,Wo和bo分别表示输出门的权重矩阵和偏置,Ct、Ct-1分别表示储存长期记忆的细胞态在t、t-1时刻的输出,

初始化LSTM深度学习网络的参数:将候选态的权重矩阵WC和偏置bC、输入门的权重矩阵Wi和偏置bi、遗忘门的权重矩阵Wf和偏置bf、输出门的权重矩阵Wo和偏置bo初始化为0~1之间的随机数。设置LSTM深度学习网络的输入层神经元个数为M,层数设置为i,每一层的输出作为下一层的输入。Initialize the parameters of the LSTM deep learning network: the weight matrix W C and bias b C of the candidate state, the weight matrix W i and bias b i of the input gate, the weight matrix W f and bias b f of the forget gate, and the output gate The weight matrix W o and bias b o are initialized as random numbers between 0 and 1. The number of neurons in the input layer of the LSTM deep learning network is set to M, the number of layers is set to i, and the output of each layer is used as the input of the next layer.
LSTM网络初始化完成之后对LSTM网络进行训练:将预处理之后的肌电信号以及关节角度信号输入LSTM模型,采用反向传播算法对上述权重矩阵和偏置进行优化,得到LSTM训练模型,三个LSTM模型进行同样的操作得到三个不同的LSTM估计子模型。其中设置训练迭代次数为epoch,损失函数为loss,优化器为optimizer,一次训练所选取的样本数为batch size。本实施例中取M=256,i=2,epoch=150,loss=mae(平均绝对误差),optimizer=Adam(Adam优化器),batch size=16。After the LSTM network initialization is completed, train the LSTM network: input the preprocessed EMG signal and joint angle signal into the LSTM model, and use the backpropagation algorithm to optimize the above weight matrix and bias to obtain the LSTM training model, three LSTM The model performs the same operation to obtain three different LSTM estimation sub-models. Among them, set the number of training iterations as epoch, the loss function as loss, the optimizer as optimizer, and the number of samples selected for one training as batch size. In this embodiment, M=256, i=2, epoch=150, loss=mae (mean absolute error), optimizer=Adam (Adam optimizer), batch size=16.
(4)训练RF切换模型:将预处理之后的肌电信号以及所对应的LSTM模型的标签作为模型输入以训练RF切换模型,RF切换模型的输出作为LSTM估计子模型的标签。其中RF切换模型的原理示意图如图3所示,对输入样本进行bootstrap抽样得到k个样本集,分别对这k个样本集使用决策树模型进行训练得到k个树分类器,其中,LSTM子模型的标签为数字1~n(共生成n个LSTM估计子模型),每个树分类器的最大深度设置成m,采用gini函数的计算方法判断节点是否继续分裂,分裂所需的最小样本数设置为f,不限制最大叶节点数,节点分裂时参与判断的最大特征数等于所有特征数。本实施例中将样本集按照bootstrap采样分成10个样本集即k=10,共有三个LSTM估计子模型故n=3,每棵树分类器的最大深度设置为2即m=2,分裂所需的最小样本数设置为2即f=2。(4) Training RF switching model: the preprocessed EMG signal and the label of the corresponding LSTM model are used as model input to train the RF switching model, and the output of the RF switching model is used as the label of the LSTM estimation sub-model. The schematic diagram of the RF switching model is shown in Figure 3. The input samples are sampled by bootstrap to obtain k sample sets, and the k sample sets are trained using the decision tree model to obtain k tree classifiers. Among them, the LSTM sub-model The labels of each tree are numbered from 1 to n (a total of n LSTM estimation sub-models are generated), the maximum depth of each tree classifier is set to m, the calculation method of the gini function is used to judge whether the node continues to split, and the minimum number of samples required for splitting is set For f, there is no limit to the maximum number of leaf nodes, and the maximum number of features involved in judging when a node splits is equal to the number of all features. In this embodiment, the sample set is divided into 10 sample sets according to bootstrap sampling, that is, k=10, there are three LSTM estimation sub-models, so n=3, the maximum depth of each tree classifier is set to 2, that is, m=2, and the split The minimum number of samples required is set to 2, ie f=2.
(5)训练好RF切换模型以及各个LSTM估计子模型之后,结合模型切换机制的LSTM混合估计模型就训练完成了,使用此模型对新输入肌电信号数据进行复杂任务下的复合运动连续估计。估计阶段使用训练阶段各通道肌电特征最大值最小值对各通道肌电特征进行归一化,将归一化的肌电特征输入RF切换模型,输出对应肌电特征所属的LSTM估计子模型,然后归一化的肌电特征输入对应的LSTM估计子模型进行估计,输出各关节角度估计值。(5) After training the RF switching model and each LSTM estimation sub-model, the LSTM hybrid estimation model combined with the model switching mechanism is trained, and this model is used to continuously estimate compound motion under complex tasks for new input EMG data. In the estimation phase, the maximum value and minimum value of the EMG features of each channel in the training phase are used to normalize the EMG features of each channel, and the normalized EMG features are input into the RF switching model, and the LSTM estimation sub-model corresponding to the EMG features is output. Then the normalized EMG feature is input into the corresponding LSTM estimation sub-model for estimation, and the estimated value of each joint angle is output.
对本发明提出的集合模型切换机制的LSTM混合估计模型在复杂任务下的肌电复合运动连续估计效果进行评估。The LSTM hybrid estimation model with the ensemble model switching mechanism proposed by the present invention is evaluated on the continuous estimation effect of myoelectric compound motion under complex tasks.
评估单一的LSTM模型在各个估计子模型中的估计精度,评价指标为皮尔森相关系数(CC)以及均方根误差(RMSE)。以下通过本实施例中适度的力情境下的构建的单一LSTM深度学习网络来说明LSTM深度学习网络的估计精度:平均CC=0.944,平均RMSE=11.63°。CC>0.8表示估计角度与实测角度之间具有极强相关性,如图4所示,RMSE表示五指角度的均方根误差为11.63°。Evaluate the estimation accuracy of a single LSTM model in each estimation sub-model, and the evaluation indicators are Pearson correlation coefficient (CC) and root mean square error (RMSE). The following describes the estimation accuracy of the LSTM deep learning network through a single LSTM deep learning network constructed under a moderate force situation in this embodiment: average CC=0.944, average RMSE=11.63°. CC>0.8 indicates that there is a strong correlation between the estimated angle and the measured angle. As shown in Figure 4, RMSE indicates that the root mean square error of the five-finger angle is 11.63°.
对比使用单一LSTM模型与结合模型切换机制的LSTM混合估计模型在复杂任务下的估计效果比较,可知,结果表明单一的LSTM深度学习网络无法适应复杂任务下的准确估计,而结合模型切换机制的LSTM混合估计模型能够适应情景变化实现在复杂任务下的准确估计。以下通过本实施例中力变化的复杂任务下单一LSTM与结合模型切换机制的LSTM混合估计模型的估计效果做进一步说明。Comparing the estimation effects of the single LSTM model and the LSTM hybrid estimation model combined with the model switching mechanism under complex tasks, it can be seen that the results show that the single LSTM deep learning network cannot adapt to accurate estimation under complex tasks, while the LSTM combined with the model switching mechanism The hybrid estimation model can adapt to the scene change to achieve accurate estimation under complex tasks. The estimation effect of the single LSTM and the LSTM hybrid estimation model combined with the model switching mechanism under the complex task of force change in this embodiment will be further explained below.
使用不同力等级条件下训练得到的单一LSTM子模型分别对不同的力等级条件下的抓握运动进行交叉估计,与使用结合模型切换机制的LSTM混合估计模型对不同力等级条件下的抓握运动连续估计进行对比,各个模型的估计效果如下表一,表二所示,其中L、M、H模型分别代表使用低等级力、中等级力、高等级力训练得到的LSTM子模型,S模型代表结合模型切换机制的LSTM混合估计模型。L、M、H力分别代表估计时输入的力为低等级力、中等级力、高等级力。其中表一对估计结果的评价指标为皮尔森相关系数(CC),表二对估计结果的评价指标为均方根误差(RMSE)。Use the single LSTM sub-model trained under different force levels to perform cross-estimation of the grasping motion under different force levels, and use the LSTM hybrid estimation model combined with the model switching mechanism to estimate the grasping motion under different force levels. Continuous estimation is compared, and the estimation effects of each model are shown in Table 1 and Table 2 below, where the L, M, and H models represent the LSTM sub-models trained using low-level force, medium-level force, and high-level force, respectively, and the S model represents LSTM Hybrid Estimation Model with Model Switching Mechanism. L, M, and H forces respectively represent the low-level force, middle-level force, and high-level force input during estimation. Among them, the evaluation index of the estimated results in Table 1 is the Pearson correlation coefficient (CC), and the evaluation index of the estimated results in Table 2 is the root mean square error (RMSE).
表一 估计结果的评价指标为皮尔森相关系数的结果Table 1 The evaluation index of the estimated results is the result of the Pearson correlation coefficient

表二 估计结果的评价指标为均方根误差的结果Table 2 The evaluation index of the estimated results is the result of the root mean square error

表一、表二显示了各个模型对于不同等级的力的估计效果,从表中可以看出各个力等级条件下的单一LSTM模型仅对该模型下的力等级条件有较好的估计效果,对于其他等级力条件下的估计效果变差。而结合模型切换机制的LSTM混合估计模型对不同等级力条件都有较好的估计效果,对比结果表明结合模型切换机制的LSTM混合估计模型对于复杂任务具有更好的鲁棒性以及估计精度。低等级力条件下训练得到的估计模型与结合模型切换机制的LSTM的混合估计模型分别对三种力等级条件下的抓握进行估计效果对比图如图5所示。由图5可知,在三种力等级混合的情况下结合模型切换机制的LSTM的混合估计模型估计出的角度曲线很好的拟合实测角度曲线,而低等级力条件下训练得到的单一LSTM估计模型估计出的角度曲线在中等级力、高等级力条件下的估计角度曲线与实测角度曲线严重不拟合。因此,单一的LSTM深度学习网络无法适应复杂任务下的准确估计,而结合模型切换机制的LSTM混合估计模型能够适应情景变化实现在复杂任务下的准确估计。Table 1 and Table 2 show the estimation effect of each model for different levels of force. It can be seen from the table that the single LSTM model under each force level condition has a good estimation effect only for the force level condition under this model. For Estimated effects become worse for other levels of force. The LSTM hybrid estimation model combined with the model switching mechanism has better estimation results for different levels of force conditions. The comparison results show that the LSTM hybrid estimation model combined with the model switching mechanism has better robustness and estimation accuracy for complex tasks. Figure 5 shows the comparison between the estimation model trained under low-level force conditions and the LSTM hybrid estimation model combined with the model switching mechanism for estimating the grip under three force level conditions. It can be seen from Figure 5 that the angle curve estimated by the LSTM hybrid estimation model combined with the model switching mechanism in the case of three kinds of force levels mixed fits the measured angle curve well, while the single LSTM estimated by training under low-level force conditions The angle curves estimated by the model under the conditions of medium force and high force are seriously inconsistent with the measured angle curves. Therefore, a single LSTM deep learning network cannot adapt to accurate estimation under complex tasks, while the LSTM hybrid estimation model combined with the model switching mechanism can adapt to scene changes to achieve accurate estimation under complex tasks.
本发明方法能够在不同的情景下进行自动切换,确定情景之后使用LSTM估计子模型进行精准的估计,保证在复杂任务下的算法鲁棒性,实现基于肌电信号完成复杂任务下的复合运动连续估计。The method of the present invention can automatically switch under different scenarios, and use the LSTM estimation sub-model to perform accurate estimation after the scenario is determined, to ensure the robustness of the algorithm under complex tasks, and to realize the continuous compound movement under complex tasks based on electromyographic signals estimate.
本发明中为了准确的区分训练阶段、估计阶段以及不同的估计模型,在发明中使用了LSTM深度学习网络、LSTM模型、LSTM子模型。在得到准确的估计模型之前即在训练好模型的所有参数之前使用LSTM深度学习网络,LSTM模型是指将LSTM深度学习网络中所有参数已经训练好之后的估计模型,LSTM子模型是指特指本发明中涉及的同一复杂任务中不同情景下分别对应的估计模型,RF切换模型是指使用RF集成学习算法将肌电特征准确识别为复杂任务中某一情景的估计模型,LSTM是LongShort-TermMemory的首字母缩写。RF为RandomForest的首字母缩写,表示随机森林分类器。In the present invention, in order to accurately distinguish between the training phase, the estimation phase and different estimation models, the LSTM deep learning network, LSTM model, and LSTM sub-model are used in the invention. Use the LSTM deep learning network before getting an accurate estimation model, that is, before training all the parameters of the model. The LSTM model refers to the estimation model after all the parameters in the LSTM deep learning network have been trained. The LSTM sub-model refers to the specific The estimation models corresponding to different scenarios in the same complex task involved in the invention, the RF switching model refers to the estimation model that uses the RF integrated learning algorithm to accurately identify the myoelectric feature as a certain scenario in a complex task, LSTM is LongShort-TermMemory Acronym. RF is an acronym for RandomForest, which means Random Forest Classifier.
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。It is easy for those skilled in the art to understand that the above descriptions are only preferred embodiments of the present invention, and are not intended to limit the present invention. Any modifications, equivalent replacements and improvements made within the spirit and principles of the present invention, All should be included within the protection scope of the present invention.
Claims (6)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011066204.7A CN112232161B (en) | 2020-09-30 | 2020-09-30 | Complex motion continuous estimation method based on electromyography mapping model switching |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011066204.7A CN112232161B (en) | 2020-09-30 | 2020-09-30 | Complex motion continuous estimation method based on electromyography mapping model switching |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN112232161A CN112232161A (en) | 2021-01-15 |
| CN112232161B true CN112232161B (en) | 2023-04-07 |
Family
ID=74119337
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202011066204.7A Active CN112232161B (en) | 2020-09-30 | 2020-09-30 | Complex motion continuous estimation method based on electromyography mapping model switching |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112232161B (en) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114055461B (en) * | 2021-08-20 | 2023-02-14 | 华中科技大学 | Robot force and position synchronous teleoperation control method and device based on myoelectric interface |
| CN114733160B (en) * | 2022-04-14 | 2022-10-18 | 福州大学 | A kind of muscle strength training equipment control method based on EMG signal |
| CN114983446A (en) * | 2022-06-16 | 2022-09-02 | 杭州电子科技大学 | A method for continuous motion estimation of finger multi-joint based on EMG signals |
| CN120452678A (en) * | 2025-04-29 | 2025-08-08 | 首都医科大学附属北京天坛医院 | A dysphagia rehabilitation training method based on VR equipment |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108874149A (en) * | 2018-07-28 | 2018-11-23 | 华中科技大学 | A method of continuously estimating human synovial angle based on surface electromyogram signal |
| CN109171707A (en) * | 2018-10-24 | 2019-01-11 | 杭州电子科技大学 | A kind of intelligent cardiac figure classification method |
| CN109262618A (en) * | 2018-12-12 | 2019-01-25 | 武汉理工大学 | Upper limb multi-joint synchronous proportional electromyography control method and system based on muscle synergy |
| CN109833031A (en) * | 2019-03-12 | 2019-06-04 | 西安交通大学 | It is a kind of that the sleep mode automatically method by stages of more physiological signals is utilized based on LSTM |
| CN110464348A (en) * | 2019-07-10 | 2019-11-19 | 深圳市智能机器人研究院 | The continuous amount of exercise recognition methods of joint of lower extremity and system based on electromyography signal |
| CN111079590A (en) * | 2019-12-04 | 2020-04-28 | 东北大学 | Peripheral vehicle behavior pre-judging method of unmanned vehicle |
| CN111134666A (en) * | 2020-01-09 | 2020-05-12 | 中国科学院软件研究所 | Emotion recognition method and electronic device based on multi-channel EEG data |
-
2020
- 2020-09-30 CN CN202011066204.7A patent/CN112232161B/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108874149A (en) * | 2018-07-28 | 2018-11-23 | 华中科技大学 | A method of continuously estimating human synovial angle based on surface electromyogram signal |
| CN109171707A (en) * | 2018-10-24 | 2019-01-11 | 杭州电子科技大学 | A kind of intelligent cardiac figure classification method |
| CN109262618A (en) * | 2018-12-12 | 2019-01-25 | 武汉理工大学 | Upper limb multi-joint synchronous proportional electromyography control method and system based on muscle synergy |
| CN109833031A (en) * | 2019-03-12 | 2019-06-04 | 西安交通大学 | It is a kind of that the sleep mode automatically method by stages of more physiological signals is utilized based on LSTM |
| CN110464348A (en) * | 2019-07-10 | 2019-11-19 | 深圳市智能机器人研究院 | The continuous amount of exercise recognition methods of joint of lower extremity and system based on electromyography signal |
| CN111079590A (en) * | 2019-12-04 | 2020-04-28 | 东北大学 | Peripheral vehicle behavior pre-judging method of unmanned vehicle |
| CN111134666A (en) * | 2020-01-09 | 2020-05-12 | 中国科学院软件研究所 | Emotion recognition method and electronic device based on multi-channel EEG data |
Non-Patent Citations (1)
| Title |
|---|
| "Simultaneous and Proportional Estimation of Multijoint Kinematics From EMG Signals for Myocontrol of Robotic Hands";Qin Zhang et al;《IEEE/ASME TRANSACTIONS ON MECHATRONICS》;20200831;第1953-1960页 * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN112232161A (en) | 2021-01-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112232161B (en) | Complex motion continuous estimation method based on electromyography mapping model switching | |
| Huang et al. | Development of a myoelectric discrimination system for a multi-degree prosthetic hand | |
| Phinyomark et al. | Surface electromyography (EMG) signal processing, classification, and practical considerations | |
| CN108874149B (en) | A method for continuous estimation of human joint angles based on surface EMG signals | |
| Ibrahimy et al. | Design and optimization of Levenberg-Marquardt based neural network classifier for EMG signals to identify hand motions | |
| Al-Qaness et al. | TCNN-KAN: Optimized CNN by Kolmogorov-Arnold network and pruning techniques for sEMG gesture recognition | |
| CN101859377A (en) | EMG signal classification method based on multi-core support vector machine | |
| CN113534960A (en) | Upper arm prosthesis control method and system based on IMU and surface electromyographic signals | |
| CN114707539A (en) | Hand joint angle estimation method, hand joint angle estimation device, storage medium and equipment | |
| WO2024103371A1 (en) | Hand joint angle estimation method | |
| CN114983446A (en) | A method for continuous motion estimation of finger multi-joint based on EMG signals | |
| Lin et al. | A normalisation approach improves the performance of inter-subject sEMG-based hand gesture recognition with a ConvNet | |
| Bao et al. | CNN confidence estimation for rejection-based hand gesture classification in myoelectric control | |
| CN106845348B (en) | A gesture recognition method based on arm surface EMG signals | |
| CN113536954A (en) | Gesture recognition method based on human body electromyographic signals | |
| Esaa et al. | Hand movements classification based on Myo armband signals | |
| Al-Sharu et al. | Enhancing prediction of prosthetic fingers movement based on sEMG using mixtures of features and random forest | |
| Kan et al. | EMG pattern recognition based on particle swarm optimization and recurrent neural network | |
| CN116108337A (en) | Hand joint angle estimation method | |
| Fu et al. | Identification of finger movements from forearm surface EMG using an augmented probabilistic neural network | |
| CN109662710A (en) | A kind of EMG Feature Extraction based on convolutional neural networks | |
| Lu et al. | Time series modeling of surface EMG based hand manipulation identification via expectation maximization algorithm | |
| Zheng et al. | Dexterous force estimation during finger flexion and extension using motor unit discharge information | |
| Orban et al. | An approach for accurate pattern recognition of four hand gestures based on sEMG signals | |
| CN117150292A (en) | A method for training gesture recognition models based on incremental learning |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |