CN111956960A - Dynamic positioning device of high-intensity focused ultrasound treatment system - Google Patents
Dynamic positioning device of high-intensity focused ultrasound treatment system Download PDFInfo
- Publication number
- CN111956960A CN111956960A CN202010837066.1A CN202010837066A CN111956960A CN 111956960 A CN111956960 A CN 111956960A CN 202010837066 A CN202010837066 A CN 202010837066A CN 111956960 A CN111956960 A CN 111956960A
- Authority
- CN
- China
- Prior art keywords
- flat plate
- main body
- plate
- positioning device
- dynamic positioning
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000009210 therapy by ultrasound Methods 0.000 title claims abstract description 8
- 230000007246 mechanism Effects 0.000 claims abstract description 48
- 238000006073 displacement reaction Methods 0.000 claims abstract description 6
- 238000002604 ultrasonography Methods 0.000 claims description 21
- 238000002560 therapeutic procedure Methods 0.000 claims description 15
- 230000003014 reinforcing effect Effects 0.000 claims description 4
- 229910000838 Al alloy Inorganic materials 0.000 claims description 2
- 230000033001 locomotion Effects 0.000 abstract description 13
- 238000000034 method Methods 0.000 abstract description 4
- 206010028980 Neoplasm Diseases 0.000 description 4
- 238000010586 diagram Methods 0.000 description 2
- 230000006698 induction Effects 0.000 description 2
- 239000000956 alloy Substances 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 244000309464 bull Species 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000000670 limiting effect Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 210000000056 organ Anatomy 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
Images



Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N7/00—Ultrasound therapy
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Surgical Instruments (AREA)
Abstract
本发明公开了一种高强度聚焦超声治疗系统动态定位装置,包括平板旋转机构和三周悬臂机构,平板旋转机构包括上层平板、中间平板、下层平板,下层平板固定在三周悬臂装置上。平板旋转机构包括绕X轴方向的转向机构和绕Y轴方向的转向机构;三周悬臂机构包括X’、Y’、Z’的三轴向移动机构。通过平板连接体使平板发生旋转,形成一个弧形机构;在相对垂直方向上,可以实现在垂直方向的旋转,形成垂直方向上的弧形机构;同时由三个电机分别控制三周悬臂机构给与其连接部分在可调范围内的空间位移。通过平板旋转产生的两个弧形机构和三周悬臂的空间移动,能实现治疗过程中动态定位装置的平稳运行,同时提高了定位的精度。
The invention discloses a dynamic positioning device for a high-intensity focused ultrasound treatment system, comprising a flat plate rotating mechanism and a three-circle cantilever mechanism. The plate rotation mechanism includes a steering mechanism around the X-axis direction and a steering mechanism around the Y-axis direction; the three-circle cantilever mechanism includes a three-axis moving mechanism of X', Y', and Z'. The plate is rotated through the plate connecting body to form an arc-shaped mechanism; in the relative vertical direction, the rotation in the vertical direction can be realized to form an arc-shaped mechanism in the vertical direction; at the same time, the three-round cantilever mechanism is controlled by three motors respectively. The spatial displacement of the connected part within the adjustable range. The space movement of the two arc-shaped mechanisms and the three-circle cantilever generated by the rotation of the flat plate can realize the smooth operation of the dynamic positioning device during the treatment process, and at the same time improve the positioning accuracy.
Description
技术领域technical field
本发明涉及一种动态定位装置,尤其涉及一种高强度聚焦超声治疗系统动态定位装置。The invention relates to a dynamic positioning device, in particular to a dynamic positioning device for a high-intensity focused ultrasound therapy system.
背景技术Background technique
高强度聚焦超声治疗系统是一种集成定位、聚焦、成像以及集中控制的复杂系统。治疗时,将超声源所发出声波能量,使用不同的方式进行聚焦,并将聚焦超声射向人体的病变组织,经过聚焦超声的照射,会让在焦域内的病变组织细胞被破坏,在不受照射的焦区外,其余的组织细胞基本上不会受到聚焦超声的影响而有损伤。High-intensity focused ultrasound therapy system is a complex system integrating positioning, focusing, imaging and centralized control. During the treatment, the sound wave energy emitted by the ultrasound source is focused in different ways, and the focused ultrasound is directed to the diseased tissue of the human body. Outside the irradiated focal area, the rest of the tissue cells are basically not damaged by the impact of focused ultrasound.
其中,动态定位系统是超声学和机器人学的结合,结构复杂,既需要满足系统的功能要求,又要具备一定的精度。高强度聚焦超声靶点小、强度高,人体内有很多重要的器官,为了避免损伤正常组织并提高治疗效率,需要根据图像处理结果将治疗系统的高强度换能器,精确定位到肿瘤发生部位。Among them, the dynamic positioning system is a combination of ultrasound and robotics, with a complex structure, which not only needs to meet the functional requirements of the system, but also has a certain accuracy. The high-intensity focused ultrasound has a small target and high intensity. There are many important organs in the human body. In order to avoid damage to normal tissues and improve the treatment efficiency, it is necessary to precisely locate the high-intensity transducer of the treatment system to the tumor site according to the image processing results. .
在治疗的定位过程中,患者是固定在治疗床上,如果治疗机构也相对固定位置,然后进行治疗的话,由于治疗时人体的固定姿势有限,因此治疗的部位是很有局限性的,而且将患者固定,对患者本人的精神和心理影响较大。因此先经过对肿瘤进行图像的采集和配准,再通过精细的机械运动定位控制,来引导换能器进行移动达到准确有效的治疗和监测。During the positioning process of the treatment, the patient is fixed on the treatment bed. If the treatment mechanism is also relatively fixed, and then the treatment is carried out, the fixed position of the human body during treatment is limited, so the treatment site is very limited, and the patient is placed in a relatively fixed position. Fixed, it has a greater impact on the patient's own spirit and psychology. Therefore, through the acquisition and registration of images of the tumor, and then through the precise mechanical motion positioning control, the transducer is guided to move to achieve accurate and effective treatment and monitoring.
现在的动态定位系统整体的结构大致分为三部分,上层的偏摆机构:让焦点的轨迹形成一个区曲线;中间层的旋转机构:使偏摆形成的圆弧曲线绕曲线中心旋转180°,圆弧可以形成一个球冠面;下层是升降机构:使形成的球冠面上下移动,形成了两个底面是球冠面的圆柱体。由于旋转和偏摆的配合使得整个机构运动时,不能一直对准病变部位进行检测,旋转时由于角度变化会引起对焦困难,而且旋转机构和偏摆机构的配合不良,整个动态定位机构精度太低。The overall structure of the current dynamic positioning system is roughly divided into three parts, the yaw mechanism on the upper layer: let the trajectory of the focus form a zone curve; the rotation mechanism on the middle layer: rotate the arc curve formed by the yaw by 180° around the center of the curve, The arc can form a spherical crown surface; the lower layer is a lifting mechanism: the formed spherical crown surface is moved up and down to form two cylinders whose bottom surfaces are spherical crown surfaces. Due to the combination of rotation and yaw, the entire mechanism cannot always be aligned with the diseased part for detection when it moves. During rotation, the angle change will cause difficulty in focusing, and the coordination between the rotation mechanism and the yaw mechanism is poor, and the accuracy of the entire dynamic positioning mechanism is too low. .
中国专利98100283.8所述的高强度聚焦超声肿瘤扫描治疗系统中的运动装置是三维直角坐标和一维或者二维转动的坐标构成,在治疗的过程中,病人在治疗床上是不完全水平的,可能和床体轴线有方向夹角,而且肿瘤的横截面一般是呈扇形结构。The motion device in the high-intensity focused ultrasound tumor scanning treatment system described in Chinese Patent 98100283.8 is composed of three-dimensional Cartesian coordinates and one-dimensional or two-dimensional rotating coordinates. During the treatment, the patient is not completely horizontal on the treatment bed, which may There is an included angle with the axis of the bed, and the cross-section of the tumor is generally a fan-shaped structure.
因此,需要一种装置使得换能器发出的焦点可以形成一个圆弧面,现有技术中的装置还实现不了该性能。Therefore, a device is required so that the focal point emitted by the transducer can form an arc surface, and the device in the prior art cannot achieve this performance.
发明内容SUMMARY OF THE INVENTION
本发明的目的是提供一种高强度聚焦超声治疗系统动态定位装置。The purpose of the present invention is to provide a dynamic positioning device for a high-intensity focused ultrasound treatment system.
本发明的目的是通过以下技术方案实现的:The purpose of this invention is to realize through the following technical solutions:
本发明的高强度聚焦超声治疗系统动态定位装置,包括上层平板、中间平板、下层平板,所述中间平板和下层平板上分别固定有拱形支架,所述拱形支架的拱顶下部固定有支架连接体,所述上层平板和中间平板的下部分别设有平板连接体;The dynamic positioning device of the high-intensity focused ultrasound treatment system of the present invention includes an upper flat plate, a middle flat plate, and a lower flat plate, and arched brackets are respectively fixed on the middle flat plate and the lower flat plate, and a bracket is fixed at the lower part of the dome of the arched bracket a connecting body, the lower parts of the upper flat plate and the middle flat plate are respectively provided with a flat plate connecting body;
所述上层平板的平板连接体与中间平板的支架连接体之间及所述中间平板的平板连接体与所述下层平板的支架连接体之间分别通过平板旋转机构连接,两个平板旋转机构的结构相同且其转动副相互垂直;The plate connecting body of the upper plate and the bracket connecting body of the middle plate and the plate connecting body of the middle plate and the bracket connecting body of the lower plate are respectively connected by a plate rotation mechanism. The structure is the same and its rotating pairs are perpendicular to each other;
所述下层平板固定在三周悬臂装置上。The lower flat plate is fixed on a three-circle cantilever device.
由上述本发明提供的技术方案可以看出,本发明实施例提供的高强度聚焦超声治疗系统动态定位装置,采用平板旋转机构和三周悬臂装置来对治疗系统进行动态定位,平板旋转机构能够绕X,Y轴方向进行小范围的旋转,形成的弧形机构使得安装在平板旋转机构上的装置发出的焦点可以形成一个圆弧面;三周悬臂装置可以实现在X’,Y’,Z’轴的轴向方向产生有限的移动,使得整个设备可以实现可调范围内的空间移动;通过三周悬臂装置和平板旋转机构能够实现空间范围内的移动,产生的弧形机构提高了整个治疗系统定位的精度。It can be seen from the above technical solutions provided by the present invention that the dynamic positioning device for the high-intensity focused ultrasound treatment system provided by the embodiment of the present invention adopts a flat plate rotation mechanism and a three-circle cantilever device to dynamically position the treatment system, and the flat plate rotation mechanism can rotate around the treatment system. A small range of rotation is performed in the X and Y axis directions to form an arc-shaped mechanism, so that the focal point emitted by the device installed on the plate rotating mechanism can form an arc surface; the three-circle cantilever device can be realized in X', Y', Z' The axial direction of the shaft produces limited movement, so that the entire device can achieve spatial movement within the adjustable range; through the three-circle cantilever device and the plate rotation mechanism, the movement within the spatial range can be achieved, and the resulting arc-shaped mechanism improves the entire treatment system. positioning accuracy.
附图说明Description of drawings
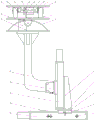
图1为本发明实施例提供的高强度聚焦超声治疗系统动态定位装置主视结构示意图;1 is a schematic front view of the structure of a dynamic positioning device for a high-intensity focused ultrasound therapy system provided by an embodiment of the present invention;
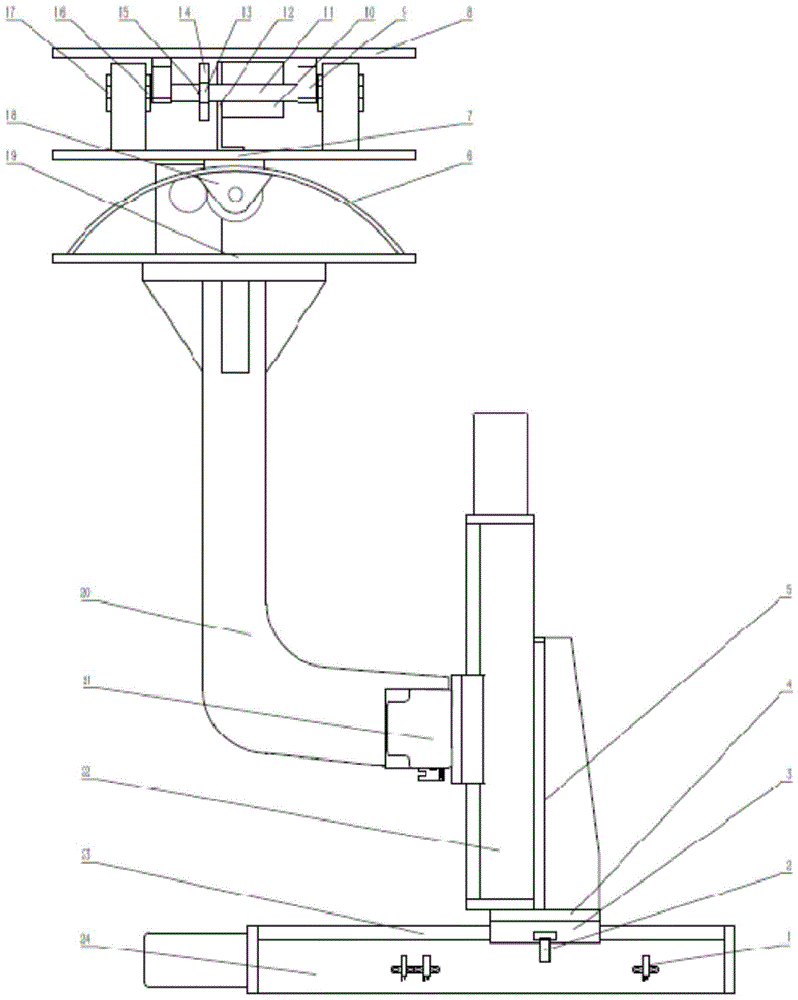
图2为本发明实施例提供的高强度聚焦超声治疗系统动态定位装置的侧视图;2 is a side view of a dynamic positioning device for a high-intensity focused ultrasound therapy system provided by an embodiment of the present invention;
图3为本发明实施例中平板旋转机构的结构图;Fig. 3 is the structure diagram of the plate rotating mechanism in the embodiment of the present invention;
图4为本发明实施例中三周悬臂装置的结构图。FIG. 4 is a structural diagram of a three-circle cantilever device in an embodiment of the present invention.
具体实施方式Detailed ways
下面将对本发明实施例作进一步地详细描述。本发明实施例中未作详细描述的内容属于本领域专业技术人员公知的现有技术。The embodiments of the present invention will be described in further detail below. Contents that are not described in detail in the embodiments of the present invention belong to the prior art known to those skilled in the art.
本发明的高强度聚焦超声治疗系统动态定位装置,其较佳的具体实施方式是:The preferred specific embodiment of the high-intensity focused ultrasound therapy system dynamic positioning device of the present invention is:
包括上层平板、中间平板、下层平板,所述中间平板和下层平板上分别固定有拱形支架,所述拱形支架的拱顶下部固定有支架连接体,所述上层平板和中间平板的下部分别设有平板连接体;It includes an upper flat plate, a middle flat plate, and a lower flat plate. An arch bracket is fixed on the middle flat plate and the lower flat plate, respectively, and a bracket connecting body is fixed at the lower part of the dome of the arched bracket. The lower part of the upper flat plate and the middle flat plate are respectively with a plate connector;
所述上层平板的平板连接体与中间平板的支架连接体之间及所述中间平板的平板连接体与所述下层平板的支架连接体之间分别通过平板旋转机构连接,两个平板旋转机构的结构相同且其转动副相互垂直;The plate connecting body of the upper plate and the bracket connecting body of the middle plate and the plate connecting body of the middle plate and the bracket connecting body of the lower plate are respectively connected by a plate rotation mechanism. The structure is the same and its rotating pairs are perpendicular to each other;
所述下层平板固定在三周悬臂装置上。The lower flat plate is fixed on a three-circle cantilever device.
所述平板旋转机构包括轴,所述轴上固定有大齿轮,所述轴的两端通过轴承安装在所述支架连接体上,所述平板连接体与所述轴固定连接;The plate rotating mechanism includes a shaft on which a large gear is fixed, two ends of the shaft are mounted on the bracket connecting body through bearings, and the plate connecting body is fixedly connected with the shaft;
所述中间平板和下层平板上分别通过安装板固定有步进电机,所述步进电机的输出轴上装有小齿轮,所述小齿轮与大齿轮啮合。A stepper motor is fixed on the middle plate and the lower plate respectively through a mounting plate, a pinion gear is mounted on the output shaft of the stepper motor, and the pinion gear is meshed with the large gear.
所述三周悬臂装置包括连接臂、X’主体、Y’主体和Z’主体,所述下层平板固定在所述连接臂的上端,所述连接臂的下端装于所述Y’主体的纵向滑槽上,所述Y’主体装于所述Z’主体的竖直滑槽上,所述Z’主体装于所述X’主体的横向滑槽上。The three-circle cantilever device includes a connecting arm, an X' main body, a Y' main body and a Z' main body, the lower flat plate is fixed on the upper end of the connecting arm, and the lower end of the connecting arm is installed in the longitudinal direction of the Y' main body. On the chute, the Y' body is mounted on the vertical chute of the Z' body, and the Z' body is mounted on the lateral chute of the X' body.
所述Z’主体的下部通过固定板和加强板固定在滑座上,所述滑座装于所述X’主体的滑槽中。The lower part of the Z' main body is fixed on the sliding seat through the fixing plate and the reinforcing plate, and the sliding seat is installed in the sliding groove of the X' main body.
所述上层平板、中层平板、下层平板采用铝合金材料。The upper flat plate, the middle flat plate and the lower flat plate are made of aluminum alloy materials.
所述上层平板与所述拱形支架之间的干涉部位开有两个长方形的槽。Two rectangular grooves are formed in the interference part between the upper flat plate and the arched bracket.
所述支架连接体焊接在所述拱形支架上,支架连接体上开有轴承安装孔并装有轴承端盖和内端盖。The bracket connecting body is welded on the arched bracket, and the bracket connecting body is provided with a bearing installation hole and is equipped with a bearing end cover and an inner end cover.
所述大齿轮通过键与所述轴固定在一起。The bull gear is keyed to the shaft.
所述轴与所述平板连接体刚性连接。The shaft is rigidly connected to the plate connector.
所述X’主体和Y’主体和Z’主体分别设有驱动电机,所述在X’主体和Y’主体和Z’主体的滑槽侧面分别安装有位移传感器,对应的滑座上装有感应片。The X' main body, the Y' main body and the Z' main body are respectively provided with driving motors, the displacement sensors are respectively installed on the sides of the chute of the X' main body, the Y' main body and the Z' main body, and the corresponding sliding seat is equipped with a sensor piece.
本发明高强度聚焦超声治疗系统动态定位装置,主要采用平板旋转机构和三周悬臂装置来对治疗系统进行动态定位。平板旋转机构能够绕X,Y轴方向进行小范围的旋转,形成的弧形机构使得安装在平板旋转机构上的装置发出的焦点可以形成一个圆弧面;三周悬臂装置可以实现在X’,Y’,Z’轴的轴向方向产生有限的移动,使得整个设备可以实现可调范围内的空间移动;通过三周悬臂装置和平板旋转机构能够实现空间范围内的移动,产生的弧形机构提高了整个治疗系统定位的精度。The dynamic positioning device of the high-intensity focused ultrasound treatment system of the present invention mainly adopts a flat plate rotation mechanism and a three-circle cantilever device to dynamically position the treatment system. The plate rotating mechanism can rotate in a small range around the X and Y axes, and the formed arc mechanism enables the focus emitted by the device installed on the plate rotating mechanism to form an arc surface; the three-circle cantilever device can be realized at X', The axial directions of the Y' and Z' axes produce limited movement, so that the entire equipment can achieve spatial movement within the adjustable range; through the three-round cantilever device and the plate rotation mechanism, the movement within the spatial range can be achieved, resulting in an arc-shaped mechanism. The positioning accuracy of the entire treatment system is improved.
具体实施例:Specific examples:
参考图1至图4,本发明所提供的一种高强度聚焦超声治疗系统动态定位装置,包括:上层平板8、中间平板7、下层平板19、拱形支架6、支架连接体18、大齿轮14、轴11、平板连接体9、连接臂20、步进电机10、X’主体24、Y’主体21、Z’主体22、滑座3、固定板4、加强板5、感应片2、位移传感器1、安装板12、轴承端盖17、内端盖16。1 to 4, a dynamic positioning device for a high-intensity focused ultrasound therapy system provided by the present invention includes: an upper flat plate 8, a middle flat plate 7, a lower
所述上层平板8、中间平板7、下层平板19,用以整个平板旋转机构中的支撑、固定;上层平板8、中间平板7开有两个长方形的槽,避免平板旋转机构在进行偏转时,上层平板8或者中间平板7与拱形支架6之间发生干涉。由于下层平板19不会旋转,因此不需要开槽。The upper flat plate 8, the middle flat plate 7, and the lower
所述拱形支架6焊接在中间平板7上,在整个平板旋转机构中起支撑的作用。The arched bracket 6 is welded on the middle plate 7 and plays a supporting role in the entire plate rotation mechanism.
所述支架连接体18焊接在拱形支架6上,支架连接体18上开有孔,通过轴承实现轴11在支架连接体18上的转动。The
所述轴承端盖17、内端盖16是轴承的一部分,用来配合轴11的运动。The bearing end cover 17 and the inner end cover 16 are part of the bearing and are used to match the movement of the shaft 11 .
所述大齿轮14通过键15与轴11固定在一起,大齿轮14和轴11是固定不变的,通过步进电机10驱动,先带动小齿轮13进行转动,小齿轮13作为传动轮带动大齿轮14的转动,由于大齿轮14同轴11固定在一起,此时轴11也进行转动。The large gear 14 is fixed with the shaft 11 through the key 15. The large gear 14 and the shaft 11 are fixed and unchanged. Driven by the stepping
所述轴11与平板连接体9刚性连接,两者之间固定不变,同时平板连接体9固定在上层平板8上,利用步进电机10的驱动,带动轴11的转动,同时固定在轴11上的平板连接体9随之进行转动,因此,通过平板连接体9实现上层平板8旋转的目的。The shaft 11 is rigidly connected with the plate connecting body 9, and the two are fixed and unchanged. At the same time, the plate connecting body 9 is fixed on the upper plate 8, and is driven by the stepping
所述安装板12对步进电机10起固定支撑的作用,固定安装在中间平板7或者下层平板19上。The mounting
进一步地,下层平板19上未开长方形的槽,让中间平板7旋转所使用的机械结构与上层平板8的旋转机构相同,但是两个机构的相对位置是垂直的。分别通过两个驱动电机的驱动,带动固定在轴上的平板连接体发生转动,实现平板旋转机构能够绕X,Y轴方向进行小范围的旋转。Further, the
进一步地,连接臂20用来连接平板旋转机构和三周悬臂装置,便于整体系统在工作时满足所需要的高度,同时避免平板旋转机构和三周悬臂装置之间相互干扰。Further, the connecting arm 20 is used to connect the plate rotating mechanism and the three-circle cantilever device, so that the overall system can meet the required height during operation, while avoiding mutual interference between the plate rotating mechanism and the three-circle cantilever device.
进一步地,X’主体24通过电机作为驱动,给予固定在X’主体24上的装置一个在X’方向上的移动;同样的Y’主体21、Z’22主体可以分别给予Y’、Z’方向上的移动。Further, the X'
进一步地,滑座3安装在主体上面,通过主体上的滑槽可以进行移动。Further, the sliding seat 3 is mounted on the main body, and can be moved through the chute on the main body.
进一步地,固定板4一侧固定在滑座3上,另一侧固定着其他的主体,起一个固定连接的作用。Further, one side of the fixing plate 4 is fixed on the sliding seat 3, and the other side is fixed with other main bodies, which play the role of a fixed connection.
进一步地,加强板5安装在X’主体24和Y’主体21之间的固定板上,对三周悬臂装置起固定支撑的作用。Further, the reinforcing plate 5 is installed on the fixed plate between the X'
进一步地,位移传感器1分别安装在X’主体24、Y’主体21和Z’主体22上,感应片2安装在滑座3上,分别对X’、Y’、Z’方向上的位移起一定调节限定作用。Further, the displacement sensor 1 is installed on the X'
此高强度聚焦超声治疗系统动态定位装置采用平板旋转机构和三周悬臂装置来对治疗系统进行动态定位。能够提供两个方向的小范围旋转和可调范围的空间移动,可以实现治疗过程中动态定位装置的平稳运行,同时提高了定位的精度。The dynamic positioning device of the high-intensity focused ultrasound treatment system adopts a flat plate rotation mechanism and a three-circle cantilever device to dynamically position the treatment system. It can provide a small range of rotation in two directions and an adjustable range of space movement, which can realize the smooth operation of the dynamic positioning device during the treatment process, and at the same time improve the positioning accuracy.
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求书的保护范围为准。The above is only a preferred embodiment of the present invention, but the protection scope of the present invention is not limited to this. Any person skilled in the art can easily think of changes or Substitutions should be covered within the protection scope of the present invention. Therefore, the protection scope of the present invention should be based on the protection scope of the claims.
Claims (10)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010837066.1A CN111956960B (en) | 2020-08-19 | 2020-08-19 | Dynamic positioning device of high-intensity focused ultrasound treatment system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010837066.1A CN111956960B (en) | 2020-08-19 | 2020-08-19 | Dynamic positioning device of high-intensity focused ultrasound treatment system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111956960A true CN111956960A (en) | 2020-11-20 |
| CN111956960B CN111956960B (en) | 2022-05-24 |
Family
ID=73388889
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010837066.1A Expired - Fee Related CN111956960B (en) | 2020-08-19 | 2020-08-19 | Dynamic positioning device of high-intensity focused ultrasound treatment system |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN111956960B (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117085267A (en) * | 2023-09-04 | 2023-11-21 | 金达威医疗科技(湖南)有限公司 | A focused ultrasonic energy output device |
Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR1454127A (en) * | 1966-02-04 | 1966-07-22 | Artashes Ervandovich Atovmian | Device for remote irradiation therapy |
| CA1055537A (en) * | 1975-06-12 | 1979-05-29 | Possis Corporation | Object positioning apparatus |
| FR2544191A1 (en) * | 1983-04-12 | 1984-10-19 | Thomson Csf | ISOCENTRIC EXPLORATION STATIVE |
| CN2404496Y (en) * | 2000-01-20 | 2000-11-08 | 北京大恒医疗设备有限公司 | Three-D adjustment positioing device for medical accelerator bed |
| US20040057557A1 (en) * | 2002-09-25 | 2004-03-25 | Peder Nafstadius | Body-supporting couch |
| US20050107702A1 (en) * | 2001-11-05 | 2005-05-19 | Shenxu He | External high-power focusing ultrasonic treatment |
| CA2616427A1 (en) * | 2005-07-29 | 2007-02-01 | Chongqing Ronghai Medical Ultrasound Industry Ltd. | Mri guided high-intensity focused ultrasonic therapeutic system |
| WO2008001003A2 (en) * | 2006-06-26 | 2008-01-03 | UNIVERSITE LOUIS PASTEUR (Etablissement Public à Caractère Scientifique, Culturel et Professionnel) | Robotized installation for the positioning and movement of a component or instrument, and treatment apparatus comprising such an installation |
| US20090036802A1 (en) * | 2005-12-27 | 2009-02-05 | Long Wang | Swing Type High-Intensity Focused Ultrasound Therapeutic Apparatus and Mri Guided High-Intensity Focused Ultrasound Therapeutic System Having Such a Swing Type Apparatus |
| CN103462631A (en) * | 2013-09-22 | 2013-12-25 | 江苏美伦影像系统有限公司 | Multi-angle cone beam CT (Computed Tomography) imager |
| CN205458742U (en) * | 2016-02-29 | 2016-08-17 | 邦盛医疗装备(天津)股份有限公司 | Take cantilever of dull and stereotyped rotational positioning mechanism |
| US20200057123A1 (en) * | 2018-08-20 | 2020-02-20 | Children's Hospital Medical Center | System and method for guiding an invasive device |
| CN210933476U (en) * | 2019-04-10 | 2020-07-07 | 连卫东 | Novel self-shielding medical electronic linear accelerator frame |
-
2020
- 2020-08-19 CN CN202010837066.1A patent/CN111956960B/en not_active Expired - Fee Related
Patent Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR1454127A (en) * | 1966-02-04 | 1966-07-22 | Artashes Ervandovich Atovmian | Device for remote irradiation therapy |
| CA1055537A (en) * | 1975-06-12 | 1979-05-29 | Possis Corporation | Object positioning apparatus |
| FR2544191A1 (en) * | 1983-04-12 | 1984-10-19 | Thomson Csf | ISOCENTRIC EXPLORATION STATIVE |
| CN2404496Y (en) * | 2000-01-20 | 2000-11-08 | 北京大恒医疗设备有限公司 | Three-D adjustment positioing device for medical accelerator bed |
| US20050107702A1 (en) * | 2001-11-05 | 2005-05-19 | Shenxu He | External high-power focusing ultrasonic treatment |
| US20040057557A1 (en) * | 2002-09-25 | 2004-03-25 | Peder Nafstadius | Body-supporting couch |
| CA2616427A1 (en) * | 2005-07-29 | 2007-02-01 | Chongqing Ronghai Medical Ultrasound Industry Ltd. | Mri guided high-intensity focused ultrasonic therapeutic system |
| US20090036802A1 (en) * | 2005-12-27 | 2009-02-05 | Long Wang | Swing Type High-Intensity Focused Ultrasound Therapeutic Apparatus and Mri Guided High-Intensity Focused Ultrasound Therapeutic System Having Such a Swing Type Apparatus |
| WO2008001003A2 (en) * | 2006-06-26 | 2008-01-03 | UNIVERSITE LOUIS PASTEUR (Etablissement Public à Caractère Scientifique, Culturel et Professionnel) | Robotized installation for the positioning and movement of a component or instrument, and treatment apparatus comprising such an installation |
| CN103462631A (en) * | 2013-09-22 | 2013-12-25 | 江苏美伦影像系统有限公司 | Multi-angle cone beam CT (Computed Tomography) imager |
| CN205458742U (en) * | 2016-02-29 | 2016-08-17 | 邦盛医疗装备(天津)股份有限公司 | Take cantilever of dull and stereotyped rotational positioning mechanism |
| US20200057123A1 (en) * | 2018-08-20 | 2020-02-20 | Children's Hospital Medical Center | System and method for guiding an invasive device |
| CN210933476U (en) * | 2019-04-10 | 2020-07-07 | 连卫东 | Novel self-shielding medical electronic linear accelerator frame |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117085267A (en) * | 2023-09-04 | 2023-11-21 | 金达威医疗科技(湖南)有限公司 | A focused ultrasonic energy output device |
| CN117085267B (en) * | 2023-09-04 | 2024-05-10 | 金达威医疗科技(湖南)有限公司 | A focused ultrasound energy output device |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111956960B (en) | 2022-05-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101217913B (en) | Robotic Arm for Patient Positioning Components | |
| CN100525716C (en) | High-strength focusing ultrasonic therapy locating scanning device | |
| JP4695231B2 (en) | Treatment table system | |
| CN1894577A (en) | Patient positioning system for radiation therapy system | |
| CN111821589B (en) | Ultrasonic treatment head motion control device with large-range target area focusing | |
| JP2004148103A (en) | Isocenter type constant velocity gantry apparatus for particle beam guidance and design method thereof | |
| JP4381422B2 (en) | Radiation therapy system | |
| CN105832362A (en) | Multi-freedom-degree cone-beam CT imaging system | |
| JP2015131088A (en) | X-ray diagnostic apparatus | |
| JPH06292675A (en) | Treatment device for treatment using focused sound waves | |
| CN111956960B (en) | Dynamic positioning device of high-intensity focused ultrasound treatment system | |
| CN105534597B (en) | Friction pulley TRUS image-guidances drive device and method | |
| CN101426432B (en) | Lithotripsy apparatus | |
| CN1925800A (en) | Installation used for image-assisted shockwave therapy | |
| US20130289400A1 (en) | Devices, apparatus and methods for analyzing, affecting and/or treating one or more anatomical structures | |
| JPH06292674A (en) | Medical treatment device for conducting treatment using converging sonic waves | |
| JP3751440B2 (en) | Particle beam therapy system | |
| CN111603691A (en) | A multi-nuclide MRI-guided HIFU focusing probe positioning device and using method thereof | |
| CN108079445A (en) | Cage radiotherapy unit | |
| JP2017029690A (en) | Collimator device, radiation therapy system using the same, control method and program | |
| JP3825384B2 (en) | Radiotherapy apparatus and method of operating the same | |
| CN109173100A (en) | Have the focused ultrasound devices of two-dimensional imaging and HIFU Treatment one for toy | |
| CN1051724C (en) | Stereo directional radiotherapy apparatus | |
| CN107890610B (en) | Patient support device with six degrees of freedom and method for tilting such a patient support device | |
| CN205697813U (en) | Multiple degrees of freedom cone-beam CT imaging system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20220524 |