CN111506190A - Real-time continuous prediction method for human motion intention based on myoelectricity - Google Patents
Real-time continuous prediction method for human motion intention based on myoelectricity Download PDFInfo
- Publication number
- CN111506190A CN111506190A CN202010245346.3A CN202010245346A CN111506190A CN 111506190 A CN111506190 A CN 111506190A CN 202010245346 A CN202010245346 A CN 202010245346A CN 111506190 A CN111506190 A CN 111506190A
- Authority
- CN
- China
- Prior art keywords
- angle
- real
- knee joint
- time
- joint angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/011—Arrangements for interaction with the human body, e.g. for user immersion in virtual reality
- G06F3/015—Input arrangements based on nervous system activity detection, e.g. brain waves [EEG] detection, electromyograms [EMG] detection, electrodermal response detection
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/044—Recurrent networks, e.g. Hopfield networks
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/045—Combinations of networks
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- General Health & Medical Sciences (AREA)
- Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Biomedical Technology (AREA)
- Computing Systems (AREA)
- Mathematical Physics (AREA)
- Data Mining & Analysis (AREA)
- Molecular Biology (AREA)
- Computational Linguistics (AREA)
- Biophysics (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- Software Systems (AREA)
- Life Sciences & Earth Sciences (AREA)
- Dermatology (AREA)
- Neurology (AREA)
- Neurosurgery (AREA)
- Human Computer Interaction (AREA)
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
- Measurement And Recording Of Electrical Phenomena And Electrical Characteristics Of The Living Body (AREA)
Abstract
本发明是一种基于肌电的人体运动意图实时连续预测方法。所述方法具体为:提取人体单侧下肢EMG信号和IMU信号,设定评价阈值;分别选择大腿和小腿任意一个电极采集到的IMU信号,通过下肢运动学解算算法求得当前时刻膝关节角度;采用滑动时间窗法对下肢EMG信号和当前时刻膝关节角度进行重采样;建立五个相同网络结构的LSTM角度预测器,与实时膝关节角度进行对比,得到评价标准均方根误差RMSE,当评价标准均方根误差RMSE小于设定的阈值时,预测器输出角度准确。本发明的训练数据均以样本为单位进行随机混洗(shuffle),可以减小固定数据顺序对预测模型参数的过拟合影响。
The invention is a real-time continuous prediction method of human body motion intention based on myoelectricity. The method is specifically as follows: extracting the EMG signal and the IMU signal of the unilateral lower limb of the human body, and setting the evaluation threshold; respectively selecting the IMU signal collected by any electrode of the thigh and the calf, and obtaining the knee joint angle at the current moment through the lower limb kinematics solution algorithm. ; Use the sliding time window method to resample the lower limb EMG signal and the knee joint angle at the current moment; establish five LSTM angle predictors with the same network structure, and compare them with the real-time knee joint angle to obtain the evaluation standard root mean square error RMSE, when When the root mean square error RMSE of the evaluation standard is less than the set threshold, the output angle of the predictor is accurate. The training data of the present invention is randomly shuffled in units of samples, which can reduce the influence of overfitting of the parameters of the prediction model caused by the fixed data sequence.
Description
技术领域technical field
本发明涉及人体运动意图实时连续预测技术领域,是一种基于肌电的人体运动意图实时连续预测方法。The invention relates to the technical field of real-time continuous prediction of human motion intention, and is a real-time continuous prediction method of human motion intention based on myoelectricity.
背景技术Background technique
机器人作为各领域学科高度融合的产物,自诞生以来,便极大解放了生产力。辅助机器人,即外骨骼机器人与动力假肢等,在养老助残,军事等领域都有着极大的研究开发价值。外骨骼机器人的独特之处在于,其工作空间与人体高度重合,机器人本体需要与人体高度协同。当外骨骼机械臂运行速度或运行轨迹与人体运动意图出现偏差时,极易阻碍人体的正常活动甚至造成伤害,这就要求基于运动意图感知的人机交互具有较高的精度与合理的助力策略。传统的外骨骼成为被动式外骨骼,它只能被动地接受外来控制指令,无法主动去判断助力时机。人机交互(Human-robot Interaction,HRI)技术通过对人体相关运动信息的处理,使得外骨骼从被动式过渡成主动理解人体的运动意图,并按照人体运动意图进行适当的辅助。As a product of a high degree of integration of disciplines in various fields, robots have greatly liberated productivity since their birth. Auxiliary robots, that is, exoskeleton robots and powered prosthetics, have great research and development value in the fields of elderly care and disabled, military and other fields. The uniqueness of the exoskeleton robot is that its working space is highly overlapped with the human body, and the robot body needs to be highly coordinated with the human body. When the running speed or trajectory of the exoskeleton manipulator deviates from the human body's motion intention, it is easy to hinder the normal activities of the human body and even cause injury. . The traditional exoskeleton becomes a passive exoskeleton, which can only passively accept external control instructions and cannot actively judge the timing of assistance. Human-robot Interaction (HRI) technology makes the exoskeleton transition from passive to active understanding of the human body's movement intention by processing human-related movement information, and provide appropriate assistance according to the human body's movement intention.
目前备受关注的生物电信号主要有脑电(Electroencephalography,EEG)、眼电(Electrooculography,EOG)以及肌电(Electromyography,EMG),相比较其它两种电信号,EMG信号具有高度相关性及相对稳定性等特点,且具有可表面无创采集等便利条件,已经广泛应用于医疗诊断,运动分析以及交互游戏等相关领域之中。At present, the bioelectric signals that have attracted much attention mainly include electroencephalography (EEG), electrooculography (EOG) and electromyography (EMG). Compared with the other two electrical signals, EMG signals are highly correlated and relatively It has the characteristics of stability, and has convenient conditions such as non-invasive surface acquisition. It has been widely used in related fields such as medical diagnosis, motion analysis and interactive games.
利用EMG信号对人体行为意图进行感知,在国内外的人机交互研究领域一直占有重要席位。人体存在肌电-机械延迟现象,即EMG信号早于动作的发生,提前时间约为25-125ms,该特性为先于动作发生前对人体关节运动学参数进行预测提供了一种可能。Brantley等人在2017年提出,连续EMG信号可用作下肢膝关节与踝关节运动学参数的预估。Jimson等人在2014年基于EMG时域特征与信号包络对手指关节的角度进行预估时,将EMD引入参考项,结果显示引入EMD后,关节角度的预估精度获得提高。国内方面,2015年,沈阳自动化研究所的韩建达等人基于Hill的肌肉模型,仅利用肱二头肌单通道EMG信号的波长和过零率特征,借助IMU传感器对上肢运动进行了角度预估,在闭环预估中,其拟合效果非常好,而在开环预估中其最终趋于发散。2017年,上海交通大学的夏鹏等人使用肱二头肌、肱三头肌、前三角肌、后三角肌与中三角肌的EMG信号,采用卷积神经网络(ConvolutionalNeural Network,CNN)与递归神经网络(Recurrent Neural Network,RNN)的组合模型,对人体上肢动作轨迹进行了估计,达到了较好的效果。The use of EMG signals to perceive human behavior intentions has always occupied an important seat in the field of human-computer interaction research at home and abroad. The human body has an electromyography-mechanical delay phenomenon, that is, the EMG signal is earlier than the action, and the lead time is about 25-125ms. This feature provides a possibility to predict the kinematic parameters of the human joint before the action. Brantley et al. proposed in 2017 that continuous EMG signals can be used to estimate the kinematic parameters of the lower extremity knee and ankle joints. In 2014, Jimson et al. introduced EMD into the reference item when estimating the angle of the finger joint based on the EMG time-domain feature and signal envelope. The results show that the estimation accuracy of the joint angle is improved after the introduction of EMD. Domestically, in 2015, based on Hill's muscle model, Han Jianda and others from Shenyang Institute of Automation used only the wavelength and zero-crossing rate characteristics of the single-channel EMG signal of the biceps brachii to estimate the angle of the upper limb movement with the help of the IMU sensor. In closed-loop prediction, it fits very well, while in open-loop prediction it eventually tends to diverge. In 2017, Xia Peng et al. of Shanghai Jiaotong University used the EMG signals of the biceps, triceps, anterior deltoid, posterior deltoid, and middle deltoid, using Convolutional Neural Network (CNN) and recursion. The combined model of neural network (Recurrent Neural Network, RNN) has estimated the motion trajectory of the upper limbs of the human body, and achieved good results.
在EMG信号的处理过程中,鲁棒特征的提取、相关程序的运行都会占用时间,且采样时刻对应的EMG信号分析结果对于结果输出时刻时的运动状态不能良好匹配。除此之外,助行设备本身的机械迟滞与控制迟滞,会加剧该问题。In the process of EMG signal processing, the extraction of robust features and the running of related programs will take time, and the EMG signal analysis results corresponding to the sampling time cannot be well matched to the motion state at the time of outputting the results. In addition, the mechanical and control hysteresis of the mobility aid itself can exacerbate the problem.
发明内容SUMMARY OF THE INVENTION
本发明为解决EMG信号分析结果对于结果输出时刻时的运动状态不能良好匹配,存在机械迟滞与控制迟滞的问题,本发明提供了一种基于肌电的人体运动意图实时连续预测方法,本发明提供了以下技术方案:In order to solve the problem that the EMG signal analysis result cannot be well matched with the motion state at the time of outputting the result, and there is mechanical hysteresis and control hysteresis, the present invention provides a real-time continuous prediction method of human motion intention based on electromyography. The following technical solutions have been proposed:
一种基于肌电的人体运动意图实时连续预测方法,包括以下步骤;A method for real-time continuous prediction of human motion intention based on electromyography, comprising the following steps;
步骤1:提取人体单侧下肢EMG信号和IMU信号,设定评价阈值;Step 1: Extract the EMG signal and IMU signal of the unilateral lower limb of the human body, and set the evaluation threshold;
步骤2:分别选择大腿和小腿任意一个电极采集到的IMU信号,通过下肢运动学解算算法求得当前时刻膝关节角度;Step 2: Select the IMU signal collected by any electrode of the thigh and calf respectively, and obtain the knee joint angle at the current moment through the lower limb kinematics solution algorithm;
步骤3:采用滑动时间窗法对下肢EMG信号和当前时刻膝关节角度进行重采样;Step 3: Use the sliding time window method to resample the lower limb EMG signal and the knee joint angle at the current moment;
步骤4:建立五个相同网络结构的LSTM角度预测器,并与五种运动模式相对应;将EMG信号与当前时刻膝关节角度根据标记的运动模式标签放入对应的LSTM角度预测器进行训练,将时间戳向后推移一定时间后的同数据长度膝关节角度向量作为预测器训练标签;Step 4: Establish five LSTM angle predictors with the same network structure and correspond to the five motion modes; put the EMG signal and the knee joint angle at the current moment into the corresponding LSTM angle predictor for training according to the labeled motion mode label, The knee joint angle vector of the same data length after the timestamp is shifted back by a certain time is used as the predictor training label;
步骤5:根据训练完毕的LSTM角度预测器,通过运动模式分类算法确定当前的运动模式,并根据当前的运动模式将数据输入至对应的LSTM预测器进行实时角度预测;Step 5: According to the trained LSTM angle predictor, determine the current motion mode through the motion mode classification algorithm, and input the data to the corresponding LSTM predictor for real-time angle prediction according to the current motion mode;
步骤6:将预测器输出角度值时间戳整体向前推移一定时间,并与实时膝关节角度进行对比,得到评价标准均方根误差RMSE,当评价标准均方根误差RMSE小于设定的阈值时,预测器输出角度准确。Step 6: Move the time stamp of the predictor output angle value forward for a certain time as a whole, and compare it with the real-time knee joint angle to obtain the evaluation standard root mean square error RMSE, when the evaluation standard root mean square error RMSE is less than the set threshold , the predictor output angle is accurate.
优选地,所述步骤1具体为:Preferably, the
将信号采集设备贴在人体单侧下的肢股直肌、股外侧肌、股内侧肌、胫骨前肌、半腱肌、股二头肌长头、外侧腓肠肌及内侧腓肠肌八块肌肉提取EMG信号和IMU信号,并设定评价阈值;Attach the signal acquisition device to the rectus femoris, vastus lateralis, vastus medialis, tibialis anterior muscle, semitendinosus, long head of biceps femoris, lateral gastrocnemius and medial gastrocnemius muscle to extract EMG signals and IMU signal, and set the evaluation threshold;
进行视频录制,通过视频判断每个数据点对应的运动模式标签,所述运动模式分为平地、上楼梯、下楼梯、上斜坡和下斜坡五种模式。Video recording is performed, and the motion mode label corresponding to each data point is judged through the video.
优选地,所述信号采集设备采用Delsys Trigno肌电采集系统,所述系统包含无线通信基站与16个无线肌电电极,每个电极内置有EMG及IMU信号采集器。Preferably, the signal acquisition device adopts the Delsys Trigno EMG acquisition system, the system includes a wireless communication base station and 16 wireless EMG electrodes, and each electrode has a built-in EMG and IMU signal collector.
优选地,所述步骤2具体为:Preferably, the step 2 is specifically:
分别选择大腿和小腿任意一个电极采集到的IMU信号,将采集到的IMU信号每采集固定长度数据通过无线模块传输至开发板卡,搭载在开发板卡的下肢运动学解算算法求得当前时刻膝关节角度,所述当前时刻膝关节角度频率与IMU信号频率一致。Select the IMU signal collected by any one of the electrodes on the thigh and calf respectively, and transmit the collected fixed length data of the IMU signal to the development board through the wireless module. Knee joint angle, the frequency of the knee joint angle at the current moment is consistent with the frequency of the IMU signal.
优选地,滑动时间窗两端均对应EMG信号与关节角度信号的同步点,滑动时间窗的步进长度保滑动后的时间窗内EMG及角度数据互相同步,采用滑动时间窗法对下肢EMG信号和当前时刻膝关节角度进行重采样。Preferably, both ends of the sliding time window correspond to the synchronization points of the EMG signal and the joint angle signal, and the step length of the sliding time window ensures that the EMG and angle data in the sliding time window are synchronized with each other. and resample the knee joint angle at the current moment.
优选地,建立五个相同网络结构的LSTM角度预测器,并与五种运动模式相对应;将EMG信号与当前时刻膝关节角度根据标记的运动模式标签放入对应的LSTM角度预测器进行训练,将时间戳向后推移27ms-300ms后的同数据长度膝关节角度向量作为预测器训练标签,采用k折交叉验证法,每次取一个样本作为测试集,其余k-1个样本作为训练集,重复k次实验,使得每个样本均可作为一次测试集数。Preferably, five LSTM angle predictors with the same network structure are established and correspond to five motion modes; the EMG signal and the knee joint angle at the current moment are put into the corresponding LSTM angle predictor for training according to the labeled motion mode label, The knee joint angle vector of the same data length after the timestamp is shifted back by 27ms-300ms is used as the predictor training label, and the k-fold cross-validation method is used. One sample is taken as the test set each time, and the remaining k-1 samples are used as the training set. Repeat the experiment k times, so that each sample can be used as a test set.
优选地,在每次训练开始前,训练数据均以样本为单位进行随机混洗。Preferably, before each training starts, the training data are randomly shuffled in units of samples.
优选地,所述步骤5具体为:所述EMG信号与IMU信号每采集固定长度数据通过无线模块传输至开发板卡,通过搭载在板卡的运动模式分类器根据EMG及IMU信号判断运动模式并保存,通过搭载开发板卡的下肢运动学解算算法求解实时膝关节角度并保存,将解算得到的实时膝关节角度及对应的EMG信号通过分类出的运动模式输入到对应的LSTM角度预测器进行角度预测,并保存结果。Preferably, the step 5 is specifically as follows: each time the EMG signal and the IMU signal collect fixed-length data, the data is transmitted to the development board through the wireless module, and the motion pattern is determined according to the EMG and IMU signals by the motion pattern classifier mounted on the board. Save, solve the real-time knee joint angle through the lower limb kinematics solution algorithm equipped with the development board and save it, and input the calculated real-time knee joint angle and the corresponding EMG signal to the corresponding LSTM angle predictor through the classified motion mode Make an angle prediction and save the result.
优选地,所述步骤6具体为:提取LSTM角度预测器的预测结果和下肢运动学解算算法求解实时膝关节角度,将LSTM角度预测器输出角度值时间戳整体向前推移27ms-300ms,并与下肢运动学解算算法求解实时膝关节角度,得到评价标准均方根误差RMSE,通过下式表示评价标准均方差:Preferably, the step 6 is specifically: extracting the prediction result of the LSTM angle predictor and the lower limb kinematics solution algorithm to solve the real-time knee joint angle, moving the time stamp of the angle value output by the LSTM angle predictor forward by 27ms-300ms as a whole, and Calculate the real-time knee joint angle with the lower extremity kinematics solution algorithm, and obtain the evaluation standard root mean square error RMSE, which is expressed by the following formula:
其中,θp为LSTM角度预测器的预测结果,θr表示实时膝关节角度,n为试验次数;Among them, θ p is the prediction result of the LSTM angle predictor, θ r is the real-time knee joint angle, and n is the number of trials;
当评价标准均方根误差RMSE小于设定的阈值时,预测器输出角度准确;当评价标准均方根误差RMSE大于设定的阈值时,重新采集数据进行训练。When the evaluation standard root mean square error RMSE is less than the set threshold, the predictor output angle is accurate; when the evaluation standard root mean square error RMSE is greater than the set threshold, re-collect data for training.
优选地,所述开发板卡搭载NVIDIA Pascal架构GPU、2个Denver 64位CPU以及四核A57复合处理器,配有Linux Ubuntu操作系统和通信接口。Preferably, the development board is equipped with an NVIDIA Pascal architecture GPU, two Denver 64-bit CPUs and a quad-core A57 composite processor, and is equipped with a Linux Ubuntu operating system and a communication interface.
本发明具有以下有益效果:The present invention has the following beneficial effects:
本发明实时解算得到的膝关节角度预测27-300ms的膝关节角度,该预测值的作用是提供运动参数输出的同时弥补决策命令传输过程中的系统延迟。本发明的训练数据均以样本为单位进行随机混洗(shuffle),可以减小固定数据顺序对预测模型参数的过拟合影响。LSTM通过设置“门结构”对相关信息进行筛选,以解决递归神经网络中的长期依赖问题,同时也在很大程度上消除了递归神经网络模型训练过程中的梯度爆炸与梯度消失的问题。The knee joint angle obtained by the real-time calculation of the present invention predicts the knee joint angle of 27-300 ms, and the function of the predicted value is to provide motion parameter output and at the same time make up for the system delay in the decision command transmission process. The training data of the present invention is randomly shuffled in units of samples, which can reduce the influence of overfitting of the parameters of the prediction model due to the fixed data sequence. LSTM filters relevant information by setting a "gate structure" to solve the long-term dependency problem in recurrent neural networks, and at the same time, it also largely eliminates the problems of gradient explosion and gradient disappearance during the training process of recurrent neural network models.
附图说明Description of drawings
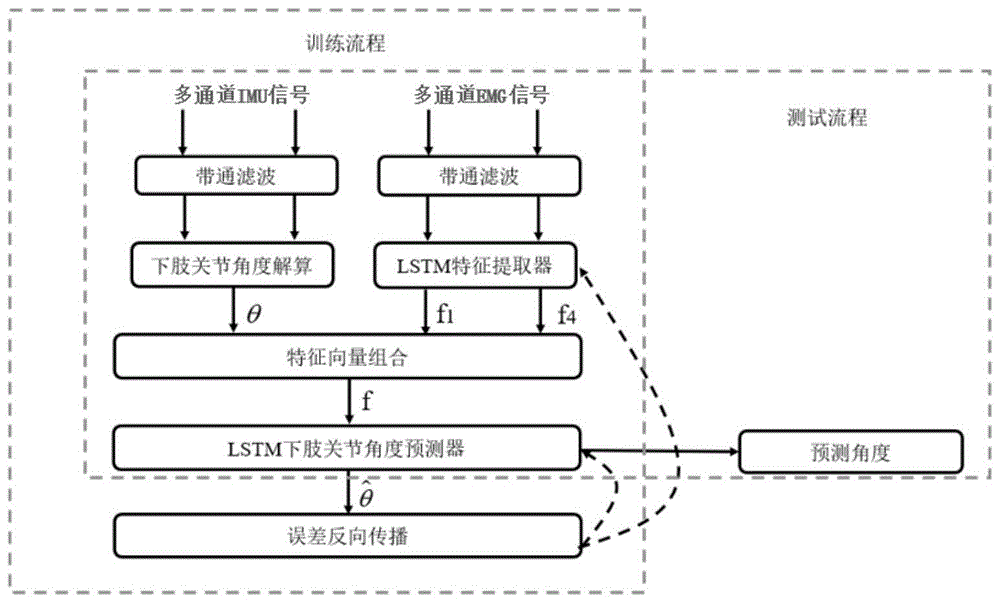
图1为基于肌电的人体运动意图实时连续预测方法流程图;Fig. 1 is the flow chart of the real-time continuous prediction method of human motion intention based on myoelectricity;
图2为将信号采集设备粘贴位置示意图;Fig. 2 is a schematic diagram of the position where the signal acquisition device is pasted;
图3为验证实验环境;Figure 3 is the verification experimental environment;
图4为基于LSTM构建的下肢关节角度预测模型网络。Figure 4 shows the lower limb joint angle prediction model network constructed based on LSTM.
具体实施方式Detailed ways
以下结合具体实施例,对本发明进行了详细说明。The present invention is described in detail below with reference to specific embodiments.
具体实施例一:Specific embodiment one:
根据图1所示,本发明提供一种基于肌电的人体运动意图实时连续预测方法,包括以下步骤:As shown in FIG. 1 , the present invention provides a method for real-time continuous prediction of human motion intention based on myoelectricity, comprising the following steps:
一种基于肌电的人体运动意图实时连续预测方法,包括以下步骤;A method for real-time continuous prediction of human motion intention based on electromyography, comprising the following steps;
步骤1:提取人体单侧下肢EMG信号和IMU信号,设定评价阈值;所述步骤1具体为:Step 1: Extract the EMG signal and IMU signal of the unilateral lower limb of the human body, and set the evaluation threshold; the
根据图2所示,将信号采集设备贴在人体单侧下的肢股直肌、股外侧肌、股内侧肌、胫骨前肌、半腱肌、股二头肌长头、外侧腓肠肌及内侧腓肠肌八块肌肉提取EMG信号和IMU信号,并设定评价阈值;As shown in Figure 2, the signal acquisition device is attached to the rectus femoris, vastus lateralis, vastus medialis, tibialis anterior, semitendinosus, biceps femoris long head, lateral gastrocnemius and medial gastrocnemius muscles on the unilateral lower limb of the human body Eight muscles extract EMG signals and IMU signals, and set evaluation thresholds;
进行视频录制,通过视频判断每个数据点对应的运动模式标签,所述运动模式分为平地、上楼梯、下楼梯、上斜坡或者下斜坡五种模式。Video recording is performed, and the motion mode label corresponding to each data point is judged through the video.
根据图3所示,本发明针对五种下肢运动模式,分别为平地、上楼梯、下楼梯、上斜坡及下斜坡,基于长短期记忆神经网络开发了针对于不同运动模式的膝关节角度预测模型,可以实现基于当前时刻的EMG信号与膝关节角度预测未来膝关节角度,在定量分析角度对人体下肢运动意图进行感知与预测。As shown in FIG. 3 , the present invention aims at five lower limb movement modes, namely flat ground, up stairs, down stairs, up slope and down slope, and develops knee joint angle prediction models for different movement modes based on long short-term memory neural network. , which can predict the future knee joint angle based on the EMG signal at the current moment and the knee joint angle, and perceive and predict the motion intention of the lower limbs of the human body from the perspective of quantitative analysis.
长短期记忆神经网络(Long Short-term Memory,LSTM)是递归神经网络的变体之一,在语音识别以及语言翻译领域内都有较为成熟的应用,非常适合处理时序信息。LSTM通过设置“门结构”对相关信息进行筛选,以解决递归神经网络中的长期依赖问题,同时也在很大程度上消除了递归神经网络模型训练过程中的梯度爆炸与梯度消失的问题。本发明提出的基于LSTM构建的下肢关节角度预测模型网络,由EMG信号特征提取器与LSTM角度预测器,模型网络结构根据图4所示,EMG信号特征提取器使用,线性层输出提取到的EMG特征向量。LSTM角度预测器作为下肢关节角度预测器使用,将当前关节角度及第一部分得出的特征向量作为输入,输出为未来时刻关节角度Long Short-term Memory (LSTM) neural network is one of the variants of recurrent neural network. It has relatively mature applications in the fields of speech recognition and language translation, and is very suitable for processing time series information. LSTM filters relevant information by setting a "gate structure" to solve the long-term dependency problem in recurrent neural networks, and at the same time, it also largely eliminates the problems of gradient explosion and gradient disappearance during the training process of recurrent neural network models. The lower limb joint angle prediction model network based on LSTM proposed by the present invention consists of an EMG signal feature extractor and an LSTM angle predictor. The model network structure is shown in Figure 4. The EMG signal feature extractor is used, and the linear layer outputs the extracted EMG Feature vector. The LSTM angle predictor is used as a lower limb joint angle predictor. The current joint angle and the feature vector obtained in the first part are used as input, and the output is the joint angle at the future time.
所述信号采集设备采用Delsys Trigno肌电采集系统,所述系统包含无线通信基站与16个无线肌电电极,每个电极内置有EMG及IMU信号采集器。The signal acquisition device adopts the Delsys Trigno EMG acquisition system, the system includes a wireless communication base station and 16 wireless EMG electrodes, and each electrode has a built-in EMG and IMU signal collector.
步骤2:分别选择大腿和小腿任意一个电极采集到的IMU信号,通过下肢运动学解算算法求得当前时刻膝关节角度;Step 2: Select the IMU signal collected by any electrode of the thigh and calf respectively, and obtain the knee joint angle at the current moment through the lower limb kinematics solution algorithm;
所述步骤2具体为:The step 2 is specifically:
分别选择大腿和小腿任意一个电极采集到的IMU信号,将采集到的IMU信号每采集固定长度数据通过无线模块传输至NVIDIA Jetson TX2开发板卡,搭载在NVIDIA JetsonTX2开发板卡的下肢运动学解算算法求得当前时刻膝关节角度,所述当前时刻膝关节角度频率与IMU信号频率一致。所述NVIDIA Jetson TX2开发板卡搭载NVIDIA Pascal架构GPU、2个Denver 64位CPU以及四核A57复合处理器,配有Linux Ubuntu操作系统和通信接口。Select the IMU signal collected by any electrode of the thigh and calf, and transmit the collected fixed-length data of the collected IMU signal to the NVIDIA Jetson TX2 development board through the wireless module, and carry it on the lower limb kinematics solution of the NVIDIA Jetson TX2 development board. The algorithm obtains the knee joint angle at the current moment, and the frequency of the knee joint angle at the current moment is consistent with the frequency of the IMU signal. The NVIDIA Jetson TX2 development board is equipped with an NVIDIA Pascal architecture GPU, 2 Denver 64-bit CPUs and a quad-core A57 composite processor, and is equipped with a Linux Ubuntu operating system and a communication interface.
步骤3:采用滑动时间窗法对下肢EMG信号和当前时刻膝关节角度进行重采样;滑动时间窗两端均对应EMG信号与关节角度信号的同步点,滑动时间窗的步进长度保滑动后的时间窗内EMG及角度数据互相同步,采用滑动时间窗法对下肢EMG信号和当前时刻膝关节角度进行重采样。Step 3: Use the sliding time window method to resample the lower limb EMG signal and the knee joint angle at the current moment; both ends of the sliding time window correspond to the synchronization points of the EMG signal and the joint angle signal, and the step length of the sliding time window ensures the The EMG and angle data in the time window are synchronized with each other, and the sliding time window method is used to resample the lower limb EMG signal and the knee joint angle at the current moment.
步骤4:建立五个相同网络结构的LSTM角度预测器,并与五种运动模式相对应;将EMG信号与当前时刻膝关节角度根据标记的运动模式标签放入对应的LSTM角度预测器进行训练,将时间戳向后推移27ms-300ms后的同数据长度膝关节角度向量作为预测器训练标签;建立五个相同网络结构的LSTM角度预测器,并与五种运动模式相对应;将EMG信号与当前时刻膝关节角度根据标记的运动模式标签放入对应的LSTM角度预测器进行训练,将时间戳向后推移27ms-300ms后的同数据长度膝关节角度向量作为预测器训练标签,采用k折交叉验证法,每次取一个样本作为测试集,其余k-1个样本作为训练集,重复k次实验,使得每个样本均可作为一次测试集数。在每次训练开始前,训练数据均以样本为单位进行随机混洗,可以减小固定数据顺序对预测模型参数的过拟合影响。Step 4: Establish five LSTM angle predictors with the same network structure and correspond to the five motion modes; put the EMG signal and the knee joint angle at the current moment into the corresponding LSTM angle predictor for training according to the labeled motion mode label, The knee joint angle vector of the same data length after the timestamp is shifted back by 27ms-300ms is used as the predictor training label; five LSTM angle predictors with the same network structure are established and correspond to the five motion patterns; the EMG signal is compared with the current The knee joint angle at the moment is put into the corresponding LSTM angle predictor for training according to the marked motion mode label, and the knee joint angle vector of the same data length after the timestamp is moved back by 27ms-300ms is used as the predictor training label, and k-fold cross-validation is used. method, each time a sample is taken as the test set, the remaining k-1 samples are used as the training set, and the experiment is repeated k times, so that each sample can be used as a test set. Before each training starts, the training data is randomly shuffled in units of samples, which can reduce the overfitting effect of the fixed data sequence on the parameters of the prediction model.
步骤5:将训练完毕的LSTM角度预测器,通过运动模式分类算法确定当前的运动模式,并根据当前的运动模式将数据输入至对应的LSTM预测器进行实时角度预测;Step 5: Determine the current motion pattern of the trained LSTM angle predictor through the motion pattern classification algorithm, and input the data to the corresponding LSTM predictor for real-time angle prediction according to the current motion pattern;
所述步骤5具体为:所述EMG信号与IMU信号每采集固定长度数据通过无线模块传输至NVIDIA Jetson TX2开发板卡,通过搭载在NVIDIA Jetson TX2板卡的运动模式分类器根据EMG及IMU信号判断运动模式并保存,通过搭载NVIDIA Jetson TX2开发板卡的下肢运动学解算算法求解实时膝关节角度并保存,将解算得到的实时膝关节角度及对应的EMG信号通过分类出的运动模式输入到对应的LSTM角度预测器进行角度预测,并保存结果。The step 5 is specifically: the EMG signal and the IMU signal are each collected fixed-length data and transmitted to the NVIDIA Jetson TX2 development board through the wireless module, and judged according to the EMG and IMU signals by the motion mode classifier mounted on the NVIDIA Jetson TX2 board. The motion mode is saved, and the real-time knee joint angle is solved and saved by the lower limb kinematics solution algorithm equipped with the NVIDIA Jetson TX2 development board. The corresponding LSTM angle predictor performs angle prediction and saves the result.
步骤6:将预测器输出角度值时间戳整体向前推移27ms-300ms,并与实时膝关节角度进行对比,得到评价标准均方根误差RMSE,当评价标准均方根误差RMSE小于设定的阈值时,预测器输出角度准确。Step 6: Move the time stamp of the predictor output angle value forward by 27ms-300ms as a whole, and compare it with the real-time knee joint angle to obtain the evaluation standard root mean square error RMSE. When the evaluation standard root mean square error RMSE is less than the set threshold , the predictor output angle is accurate.
所述步骤6具体为:提取LSTM角度预测器的预测结果和下肢运动学解算算法求解实时膝关节角度,将LSTM角度预测器输出角度值时间戳整体向前推移27ms-300ms,并与下肢运动学解算算法求解实时膝关节角度,得到评价标准均方根误差RMSE,通过下式表示评价标准均方差:The step 6 is specifically: extracting the prediction result of the LSTM angle predictor and the lower limb kinematics solution algorithm to solve the real-time knee joint angle, moving the time stamp of the angle value output by the LSTM angle predictor forward as a whole by 27ms-300ms, and combining it with the lower limb movement. Learn the solution algorithm to solve the real-time knee joint angle, and obtain the evaluation standard root mean square error RMSE, which is expressed by the following formula:
其中,θp为LSTM角度预测器的预测结果,θr表示实时膝关节角度,n=k;Among them, θ p is the prediction result of the LSTM angle predictor, θ r represents the real-time knee joint angle, n=k;
当评价标准均方根误差RMSE小于设定的阈值时,预测器输出角度准确;当评价标准均方根误差RMSE大于设定的阈值时,重新采集数据进行训练。When the evaluation standard root mean square error RMSE is less than the set threshold, the predictor output angle is accurate; when the evaluation standard root mean square error RMSE is greater than the set threshold, re-collect data for training.
所述NVIDIA Jetson TX2开发板卡搭载NVIDIA Pascal架构GPU、2个Denver 64位CPU以及四核A57复合处理器,配有Linux Ubuntu操作系统和通信接口。The NVIDIA Jetson TX2 development board is equipped with an NVIDIA Pascal architecture GPU, 2 Denver 64-bit CPUs and a quad-core A57 composite processor, and is equipped with a Linux Ubuntu operating system and a communication interface.
以上所述仅是一种基于肌电的人体运动意图实时连续预测方法的优选实施方式,一种基于肌电的人体运动意图实时连续预测方法的保护范围并不仅局限于上述实施例,凡属于该思路下的技术方案均属于本发明的保护范围。应当指出,对于本领域的技术人员来说,在不脱离本发明原理前提下的若干改进和变化,这些改进和变化也应视为本发明的保护范围。The above is only a preferred embodiment of a method for real-time continuous prediction of human motion intention based on myoelectricity. The technical solutions under the idea all belong to the protection scope of the present invention. It should be pointed out that for those skilled in the art, some improvements and changes without departing from the principle of the present invention should also be regarded as the protection scope of the present invention.
Claims (10)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010245346.3A CN111506190A (en) | 2020-03-31 | 2020-03-31 | Real-time continuous prediction method for human motion intention based on myoelectricity |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010245346.3A CN111506190A (en) | 2020-03-31 | 2020-03-31 | Real-time continuous prediction method for human motion intention based on myoelectricity |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN111506190A true CN111506190A (en) | 2020-08-07 |
Family
ID=71864769
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010245346.3A Pending CN111506190A (en) | 2020-03-31 | 2020-03-31 | Real-time continuous prediction method for human motion intention based on myoelectricity |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN111506190A (en) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112434630A (en) * | 2020-12-01 | 2021-03-02 | 深圳先进技术研究院 | Training method of continuous motion information prediction model and training device and equipment thereof |
| CN113534960A (en) * | 2021-07-29 | 2021-10-22 | 中国科学技术大学 | Upper arm prosthesis control method and system based on IMU and surface electromyographic signals |
| CN114767463A (en) * | 2022-03-11 | 2022-07-22 | 上海电机学院 | Consciousness control exercise rehabilitation system and method based on surface myoelectricity |
| CN114983446A (en) * | 2022-06-16 | 2022-09-02 | 杭州电子科技大学 | A method for continuous motion estimation of finger multi-joint based on EMG signals |
| CN115120471A (en) * | 2022-05-23 | 2022-09-30 | 中国科学院深圳先进技术研究院 | Motion mode detection method and device for lower limb exoskeleton and readable storage medium |
| CN115399791A (en) * | 2022-06-28 | 2022-11-29 | 天津大学 | Stroke lower limb function assessment method and system based on myoelectric motion multi-data fusion |
| CN115416023A (en) * | 2022-08-30 | 2022-12-02 | 华中科技大学 | Somatosensory teleoperation robot system control method based on 5G network |
| CN116649958A (en) * | 2023-05-04 | 2023-08-29 | 北京天翔睿翼科技有限公司 | Method and system for judging accuracy of model prediction knee joint angle |
| CN118873125A (en) * | 2024-07-08 | 2024-11-01 | 煤炭科学研究总院有限公司 | A gait parameter adaptive optimization method and system based on LSTM |
| CN119626451A (en) * | 2024-11-28 | 2025-03-14 | 安徽哈工标致医疗健康产业有限公司 | A non-invasive brain-computer interface rehabilitation robot |
| CN120392125A (en) * | 2025-07-03 | 2025-08-01 | 浙江科技大学 | Lower limb movement intention recognition method and system based on electromyographic signals |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20180307314A1 (en) * | 2012-06-14 | 2018-10-25 | Medibotics Llc | Circumferential Array of Electromyographic (EMG) Sensors |
| CN109657651A (en) * | 2019-01-16 | 2019-04-19 | 杭州电子科技大学 | A kind of continuous method for estimating of lower limb knee joint based on electromyography signal |
| CN109940584A (en) * | 2019-03-25 | 2019-06-28 | 杭州程天科技发展有限公司 | The detection method that a kind of exoskeleton robot and its detection human motion are intended to |
-
2020
- 2020-03-31 CN CN202010245346.3A patent/CN111506190A/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20180307314A1 (en) * | 2012-06-14 | 2018-10-25 | Medibotics Llc | Circumferential Array of Electromyographic (EMG) Sensors |
| CN109657651A (en) * | 2019-01-16 | 2019-04-19 | 杭州电子科技大学 | A kind of continuous method for estimating of lower limb knee joint based on electromyography signal |
| CN109940584A (en) * | 2019-03-25 | 2019-06-28 | 杭州程天科技发展有限公司 | The detection method that a kind of exoskeleton robot and its detection human motion are intended to |
Non-Patent Citations (1)
| Title |
|---|
| 郭浩: "基于EMG的人体下肢运动意图感知与预测研究", 《中国优秀硕士学位论文全文数据库信息科技辑》 * |
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112434630B (en) * | 2020-12-01 | 2022-08-16 | 深圳先进技术研究院 | Training method of continuous motion information prediction model and training device and equipment thereof |
| CN112434630A (en) * | 2020-12-01 | 2021-03-02 | 深圳先进技术研究院 | Training method of continuous motion information prediction model and training device and equipment thereof |
| CN113534960A (en) * | 2021-07-29 | 2021-10-22 | 中国科学技术大学 | Upper arm prosthesis control method and system based on IMU and surface electromyographic signals |
| CN113534960B (en) * | 2021-07-29 | 2024-05-28 | 中国科学技术大学 | Upper arm prosthesis control method and system based on IMU and surface electromyography signal |
| CN114767463A (en) * | 2022-03-11 | 2022-07-22 | 上海电机学院 | Consciousness control exercise rehabilitation system and method based on surface myoelectricity |
| CN115120471A (en) * | 2022-05-23 | 2022-09-30 | 中国科学院深圳先进技术研究院 | Motion mode detection method and device for lower limb exoskeleton and readable storage medium |
| CN115120471B (en) * | 2022-05-23 | 2025-03-21 | 中国科学院深圳先进技术研究院 | Method, device and readable storage medium for detecting motion pattern of lower limb exoskeleton |
| CN114983446A (en) * | 2022-06-16 | 2022-09-02 | 杭州电子科技大学 | A method for continuous motion estimation of finger multi-joint based on EMG signals |
| CN115399791A (en) * | 2022-06-28 | 2022-11-29 | 天津大学 | Stroke lower limb function assessment method and system based on myoelectric motion multi-data fusion |
| CN115416023B (en) * | 2022-08-30 | 2024-12-27 | 华中科技大学 | Control method of somatosensory teleoperation robot system based on 5G network |
| CN115416023A (en) * | 2022-08-30 | 2022-12-02 | 华中科技大学 | Somatosensory teleoperation robot system control method based on 5G network |
| CN116649958A (en) * | 2023-05-04 | 2023-08-29 | 北京天翔睿翼科技有限公司 | Method and system for judging accuracy of model prediction knee joint angle |
| CN118873125A (en) * | 2024-07-08 | 2024-11-01 | 煤炭科学研究总院有限公司 | A gait parameter adaptive optimization method and system based on LSTM |
| CN119626451A (en) * | 2024-11-28 | 2025-03-14 | 安徽哈工标致医疗健康产业有限公司 | A non-invasive brain-computer interface rehabilitation robot |
| CN120392125A (en) * | 2025-07-03 | 2025-08-01 | 浙江科技大学 | Lower limb movement intention recognition method and system based on electromyographic signals |
| CN120392125B (en) * | 2025-07-03 | 2025-10-14 | 浙江科技大学 | Electromyographic signal-based lower limb movement intention recognition method and system |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111506190A (en) | Real-time continuous prediction method for human motion intention based on myoelectricity | |
| CN109259739B (en) | Myoelectricity estimation method of wrist joint movement moment | |
| KR101666399B1 (en) | Human joint kinematics information extraction method from multi-channel surface electromyogram signals, recording medium and device for performing the method | |
| CN110801226A (en) | Human knee joint moment testing system method based on surface electromyographic signals and application | |
| CN111506189B (en) | Motion pattern prediction and switching control method for complex human motion | |
| Kwon et al. | Real-time upper limb motion estimation from surface electromyography and joint angular velocities using an artificial neural network for human–machine cooperation | |
| Koch et al. | A recurrent neural network for hand gesture recognition based on accelerometer data | |
| CN114897012A (en) | Intelligent prosthetic arm control method based on vital machine interface | |
| CN119367682A (en) | Integrated rehabilitation training system based on motion capture and electromyography feedback | |
| CN114983446A (en) | A method for continuous motion estimation of finger multi-joint based on EMG signals | |
| CN106110587A (en) | Lower limb exoskeleton rehabilitation system based on man-computer cooperation and method | |
| Zeng et al. | Motion prediction based on sEMG-transformer for lower limb exoskeleton robot control | |
| Tao et al. | Multi-channel sEMG based human lower limb motion intention recognition method | |
| Li et al. | Prediction of knee joint moment by surface electromyography of the antagonistic and agonistic muscle pairs | |
| CN111259699A (en) | A method and device for human action recognition and prediction | |
| Pang et al. | A surface EMG signals-based real-time continuous recognition for the upper limb multi-motion | |
| Zhang et al. | Real‐time gait intention recognition for active control of unilateral knee exoskeleton | |
| Tong et al. | BP-AR-based human joint angle estimation using multi-channel sEMG | |
| Wang et al. | Enhancing locomotion-mode recognition and transition prediction with (bio) mechanical sensor fusion for intelligent prosthetic knees | |
| Messaoui et al. | Deep learning-based efficient human joint movement prediction using surface electromyography data | |
| CN117398264A (en) | Lower limb rehabilitation system capable of automatically switching active control modes and control method | |
| Su et al. | A Recurrent Neural Network Based Prediction Method for Continuous Joint Angle Movement | |
| Shen et al. | Simultaneous gait event intention detection using single semg sensor for lower limb exoskeleton | |
| Chongzaijiao et al. | Prediction of finger motions based on high-density electromyographic signals using two-dimensional convolutional neural networks | |
| Qi et al. | Active learning strategy of finger flexion tracking using sEMG for robot hand control |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |