CN111308475A - Method and apparatus for sensing the surroundings of a vehicle and a vehicle having the same - Google Patents
Method and apparatus for sensing the surroundings of a vehicle and a vehicle having the same Download PDFInfo
- Publication number
- CN111308475A CN111308475A CN201911272995.6A CN201911272995A CN111308475A CN 111308475 A CN111308475 A CN 111308475A CN 201911272995 A CN201911272995 A CN 201911272995A CN 111308475 A CN111308475 A CN 111308475A
- Authority
- CN
- China
- Prior art keywords
- vehicle
- sensor
- acoustic
- signal
- surroundings
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/539—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 using analysis of echo signal for target characterisation; Target signature; Target cross-section
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/93—Sonar systems specially adapted for specific applications for anti-collision purposes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/93—Sonar systems specially adapted for specific applications for anti-collision purposes
- G01S15/931—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/521—Constructional features
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/523—Details of pulse systems
- G01S7/526—Receivers
- G01S7/527—Extracting wanted echo signals
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/534—Details of non-pulse systems
- G01S7/536—Extracting wanted echo signals
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/003—Bistatic sonar systems; Multistatic sonar systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/93—Sonar systems specially adapted for specific applications for anti-collision purposes
- G01S15/931—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2015/937—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles sensor installation details
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Acoustics & Sound (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
- Traffic Control Systems (AREA)
Abstract
本发明涉及一种用于感测车辆周围环境的方法,该方法包括以下步骤:借助至少一个受车辆束缚的声学传感器(14)从车辆周围环境(30)中接收至少一个声学信号(36,46);分析评估所接收的信号并且根据该分析评估确定周围环境(30)的至少一个特性;其特征在于,至少一个受车辆束缚的声学传感器(14)这样布置在车辆(10)的车底(12)的区域中,使得所接收的声学信号(16)至少部分地被行车道表面(20)从车辆(10)的周围环境(30)的区域反射至受车辆束缚的声学传感器(14),其中,车辆(10)的周围环境(30)尤其包括处于车身周围的附近区域中的行车道和/或包括处于车辆(10)下方的区域。本发明还涉及一种设备和具有该设备的车辆。
The invention relates to a method for sensing a vehicle surroundings, the method comprising the steps of receiving at least one acoustic signal (36, 46) from the vehicle surroundings (30) by means of at least one vehicle-bound acoustic sensor (14). ); the received signal is evaluated and at least one characteristic of the surrounding environment (30) is determined based on this analysis; characterized in that at least one vehicle-bound acoustic sensor (14) is arranged in the underbody of the vehicle (10) ( 12) such that the received acoustic signal (16) is at least partially reflected by the roadway surface (20) from an area of the surrounding environment (30) of the vehicle (10) to the vehicle-bound acoustic sensor (14), In this case, the surroundings ( 30 ) of the vehicle ( 10 ) include, in particular, the roadway in the vicinity of the vehicle body and/or the area below the vehicle ( 10 ). The invention also relates to a device and a vehicle having the device.
Description
技术领域technical field
本发明涉及一种用于感测车辆的周围环境的方法,其方式是:借助至少一个声学传感器和/或借助受车辆束缚的附加接收器接收至少一个从车辆周围环境反射的声学信号并且对所接收的回波信号进行分析评估并且根据所述分析评估确定该周围环境的至少一个特性。本发明还涉及一种设备,其构造为用于执行本发明的方法。此外本发明还涉及一种具有这样的设备的车辆。The present invention relates to a method for sensing the surroundings of a vehicle by receiving at least one acoustic signal reflected from the surroundings of the vehicle by means of at least one acoustic sensor and/or by means of an additional receiver bound to the vehicle and for all the acoustic signals reflected from the surroundings of the vehicle. The received echo signals are evaluated and at least one property of the surrounding environment is determined based on the evaluation. The invention also relates to a device configured for carrying out the method of the invention. Furthermore, the invention relates to a vehicle having such a device.
背景技术Background technique
当今,对于自主行驶而言需要大量传感器,其中有激光雷达传感器,摄像机传感器,雷达传感器和超声波传感器。超声波传感器通常可被看到地安装在车辆的保险杠上。Today, a large number of sensors are required for autonomous driving, among which are lidar sensors, camera sensors, radar sensors and ultrasonic sensors. Ultrasonic sensors are usually visibly mounted on the bumper of the vehicle.
由DE 10 2014 221 990 A1已知的是,借助基于车辆的周围环境传感装置感测车辆的周围环境,测量周围环境中的行车道表面的与碰撞相关的结构的几何形状,将所述与碰撞相关的结构的几何形状与车辆的当前配置进行比较,并且如果该比较得出在所述结构与车辆的轮辋和/或车辆底面和/或车辆的扰流板之间预计存在碰撞,那么输出信号。在此,周围环境传感装置优选布置车辆外壳上,即布置在车辆保险杠的区域中,并且可以构型为超声波传感器。It is known from
发明内容SUMMARY OF THE INVENTION
对于自主行驶而言,应通过尽可能低成本的传感器来改进环境识别。此外,应更好地确保特殊状况的安全,例如自主行驶的开始。For autonomous driving, environmental recognition should be improved by sensors that are as inexpensive as possible. In addition, the safety of special situations, such as the start of autonomous driving, should be better ensured.
根据本发明的第一方面,提出一种用于感测车辆周围环境的方法,该方法包括以下步骤:According to a first aspect of the present invention, a method for sensing a surrounding environment of a vehicle is proposed, the method comprising the following steps:
-借助至少一个受车辆束缚的声学传感器并且可选地借助受车辆束缚的附加接收器从所述车辆周围环境中接收至少一个声学信号,- receiving at least one acoustic signal from the surroundings of the vehicle by means of at least one vehicle-bound acoustic sensor and optionally by means of an additional vehicle-bound receiver,
-分析评估所接收的信号并且根据所述分析评估确定所述周围环境的至少一个特性,- analyzing and evaluating the received signal and determining at least one characteristic of the surrounding environment based on the analyzing and evaluating,
其中,根据本发明,至少一个受车辆束缚的声学传感器这样布置在车辆的车底区域中,使得所接收的声学信号至少部分地被行车道表面从车辆周围环境的区域反射至受车辆束缚的声学传感器。Thereby, according to the invention, at least one vehicle-bound acoustic sensor is arranged in the underbody area of the vehicle in such a way that the received acoustic signal is at least partially reflected by the road surface from the area of the vehicle surroundings to the vehicle-bound acoustic sensor sensor.
优选,在从车辆周围环境中接收至少一个声学信号的步骤之前,借助至少一个受车辆束缚的声学传感器发送声学信号,其中,进行发送的声学传感器这样布置在车辆的车底区域中,使得所发送的声学信号至少部分地被行车道表面反射到车辆周围环境的区域中,其中,所接收的信号包括所发送的信号的回波信号。尤其,进行发送的声学传感器也可以用于从车辆的周围环境中接收声学信号。换言之,传感器单元既可以用作发送器又可以用作接收器。Preferably, before the step of receiving at least one acoustic signal from the vehicle surroundings, the acoustic signal is transmitted by means of at least one vehicle-bound acoustic sensor, wherein the transmitting acoustic sensor is arranged in the underbody area of the vehicle such that the transmitted acoustic signal is transmitted The acoustic signal is at least partially reflected by the road surface into the region of the vehicle surroundings, wherein the received signal comprises an echo signal of the transmitted signal. In particular, the transmitting acoustic sensor can also be used to receive acoustic signals from the surroundings of the vehicle. In other words, the sensor unit can function as both a transmitter and a receiver.
在此,车辆的周围环境尤其指的是在车身周围或者说车辆的外轮廓周围的附近区域中的行车道。车辆的周围环境也可以包括与该附近区域邻接的面和/或包括车辆下方的区域,例如在行驶方向上在轮胎(所谓的待驶过的轮胎轨迹(Reifenspur))前面的区域。所述周围环境的特性例如可以是关于以下方面的信息:在该周围环境中是否存在障碍物,并且这些障碍物是何种类型和/或这些障碍物相对于本车辆的间距有多大并且相对于本车辆位于哪个位置上。替代或附加地,周围环境的特性也可以包括行车道表面的当前状态,例如粗糙度和/或摩擦值和/或潮湿和/或雪和/或冰。In this context, the surroundings of the vehicle refer in particular to the roadway in the vicinity of the body or the outer contour of the vehicle. The surroundings of the vehicle can also include the area adjoining the vicinity and/or the area below the vehicle, for example the area in front of the tires (the so-called tire track to be driven) in the direction of travel. The properties of the surrounding environment can be, for example, information on whether obstacles are present in the surrounding environment, and what type these obstacles are and/or how far apart these obstacles are from the host vehicle and relative to the vehicle. Where the vehicle is located. Alternatively or additionally, the properties of the surrounding environment can also include the current state of the road surface, such as roughness and/or friction value and/or wetness and/or snow and/or ice.
因此,尤其可以构造为超声波传感器的所述声学传感器固定在车辆的车底上并且这样定向,使得该声学传感器的声锥(Schallkegel)或者说它的接收范围这样定向到行车道上,使得所接收的和必要时所发送的声音被行车道表面至少部分地反射。因此,声学信号可以很大程度不受阻地从车辆的车身区域到达车辆的周围环境中并且从周围环境到达传感器。所述声学传感器尤其不是垂直指向下方,而是具有方位角或者说倾角,所发送的声学信号由于所述方位角或者说倾角而被行车道表面反射到车辆的周围环境中。如果声学信号在那里例如碰到一个对象上,那么产生回波信号,该回波信号基本在相同路径上被反射回到传感器。Therefore, the acoustic sensor, which can be designed in particular as an ultrasonic sensor, is fastened to the underbody of the vehicle and oriented such that its sound cone or its receiving area is directed onto the roadway such that the received And if necessary the transmitted sound is at least partially reflected by the road surface. Therefore, the acoustic signal can travel largely unhindered from the body region of the vehicle into the surroundings of the vehicle and from the surroundings to the sensor. In particular, the acoustic sensor does not point vertically downwards, but has an azimuth or inclination angle, due to which the transmitted acoustic signal is reflected by the road surface into the surroundings of the vehicle. If the acoustic signal hits an object there, for example, an echo signal is generated, which is reflected back to the sensor substantially on the same path.
优选,对所接收的声学信号的分析评估包括确定行车道表面的至少一个特性。特别优选,通过求取所接收的信号的噪声级来确定行车道表面的特性。从所述噪声级可以确定行车道表面的特性、尤其行车道表面的粗糙度和/或湿度和或行车道表面的其它特性。Preferably, the analytical evaluation of the received acoustic signal comprises the determination of at least one characteristic of the road surface. Particularly preferably, the properties of the road surface are determined by determining the noise level of the received signal. The characteristics of the road surface, in particular the roughness and/or the humidity of the road surface and/or other characteristics of the road surface can be determined from the noise level.
也特别有益的是,声学传感器这样布置,使得它的声锥至少部分地对准待驶过的轮胎轨迹。由此,可以特别有效地感测行车道状态(例如通过轮胎噪声和散射的地面回波来感测潮湿、冰和雪)。此外可以感测,在待驶过的轮胎轨迹中是否存在障碍物(例如小动物,石头,人的脚尖)。此外,可以感测不同的行车道覆盖物(例如水泥,闭孔性或开孔性沥青),其中,可以减少路肩、铁路轨道或行车道标记的影响。此外,可以区分并识别行车道状态(例如潮湿、结冰、下雪、污染等),这些行车道状态对于与轮胎的摩擦接触是决定性的。It is also particularly advantageous if the acoustic sensor is arranged such that its sound cone is at least partially aligned with the track of the tire to be driven over. Thereby, roadway conditions can be sensed particularly effectively (eg wetness, ice and snow through tire noise and scattered ground echoes). Furthermore, it is possible to sense whether obstacles (eg small animals, stones, human toes) are present in the tire track to be driven. In addition, different roadway coverings (eg cement, closed-cell or open-cell asphalt) can be sensed, wherein the influence of road shoulders, railway tracks or roadway markings can be reduced. Furthermore, roadway conditions (eg wet, icy, snowy, polluted, etc.) which are decisive for the frictional contact with the tire can be distinguished and identified.
在本发明的一个优选实施方式中,对所接收的回波信号的分析评估包括确定信号渡越时间,其中,尤其对车辆周围环境中的对象进行识别。在此充分利用的是,当声锥部分地直接对准待识别的对象时,这造成传感器的特别大的作用范围,因为声音既可以直接到达传感器本身又可以通过从行车道表面的反射到达所述对象,其中,从所述对象处的反射同样既直接地又经由行车道反射间接地回到传感器。因此,优选可以通过对所发送的声学信号的第一信号组成部分的第一回波信号进行分析评估和对所发送的声学信号的第二信号组成部分的第二回波信号进行分析评估来识别对象,其中,所述第一信号组成部分在其碰到所述对象之前在行车道表面上被反射,其中,第二信号组成部分直接碰到所述对象。In a preferred embodiment of the invention, the evaluation of the received echo signals includes the determination of the signal transit time, wherein in particular objects in the surroundings of the vehicle are identified. The advantage here is that when the sound cone is partially directed directly at the object to be recognized, this results in a particularly large range of action of the sensor, since the sound can both directly reach the sensor itself and all objects by reflection from the road surface. the object, wherein the reflections from the object also return to the sensor both directly and indirectly via roadway reflections. Therefore, the identification can preferably be achieved by evaluating the first echo signal of the first signal component of the transmitted acoustic signal and evaluating the second echo signal of the second signal component of the transmitted acoustic signal Object, wherein the first signal component is reflected on the road surface before it hits the object, wherein the second signal component directly hits the object.
此外有利的是,除了车底中的声学传感器以外附加地还利用例如车辆的保险杠中或一侧中例如门槛或车门中的、位置更高的传感器,以便因此通过行车道表面的散射的十字回波感测对象和道路状态。这具有以下优点:不仅可以测量行车道的直接反射特性,而且还可以测量间接反射特性,并且可以从这两个部分的比例关系获得关于道路状态的进一步信息并且由此可以更精确和更可靠地确定道路状态。此外,由于不同的声音传播路径,在道路表面处反射的声音可以与直接传递的声音发生正叠加或负叠加(干涉)。通过附加地对这些所谓的十字回波进行分析评估,以下机会会更大:可以从有利于更大作用范围的声波正干涉效应、即正叠加获益。It is also advantageous to use, in addition to the acoustic sensors in the vehicle body, higher-positioned sensors, for example in the bumper of the vehicle or on one side, for example in the door sills or in the doors, in order to thereby pass the scattered crosses of the road surface. Echo senses objects and road conditions. This has the advantage that not only the direct reflection properties of the roadway, but also the indirect reflection properties can be measured, and further information about the state of the road can be obtained from the proportional relationship of the two parts and thus more precise and reliable Determine the road state. Furthermore, due to the different sound propagation paths, the sound reflected at the road surface can have positive or negative superposition (interference) with the directly transmitted sound. By additionally evaluating these so-called cross echoes, there is a greater opportunity to benefit from the positive interference effect of the acoustic waves, ie positive superposition, which favors a larger range.
进一步优选,可以由至少一个第一接收器接收反射的声学回波信号并且可以确定第一渡越时间,并且可以由至少一个第二接收器接收反射的声学信号并且可以确定第二渡越时间。第一接收器可以是进行发送的传感器本身,第二接收器可以是附加的声学传感器,该声学传感器设置在车辆上的另一位置上。通过对第一渡越时间和第二渡越时间进行分析评估,可以确定进行反射的对象相对于发送器和/或接收器的相对位置。例如,第一接收器作为声学传感器的一部分布置在车辆的车底区域中,第二接收器布置在车辆的外表面上,尤其车辆的侧面上。Further preferably, the reflected acoustic echo signal can be received by at least one first receiver and the first transit time can be determined, and the reflected acoustic signal can be received by at least one second receiver and the second transit time can be determined. The first receiver may be the transmitting sensor itself, and the second receiver may be an additional acoustic sensor arranged at another location on the vehicle. The relative position of the reflecting object with respect to the transmitter and/or the receiver can be determined by evaluating the first and second transit times. For example, the first receiver is arranged as part of the acoustic sensor in the underbody area of the vehicle, and the second receiver is arranged on the outer surface of the vehicle, in particular on the side of the vehicle.
根据本发明的第二方面,提出一种用于感测车辆周围环境的设备,其中,所述设备构造为用于执行如前所述构造的方法。所述设备包括:According to a second aspect of the present invention, an apparatus for sensing the surroundings of a vehicle is proposed, wherein the apparatus is configured to carry out a method as configured as described above. The device includes:
-至少一个受车辆束缚的声学传感器,尤其超声波传感器,其构造为用于发送声学信号、尤其超声波信号并且用于接收声学信号、尤其超声波信号;- at least one vehicle-bound acoustic sensor, in particular an ultrasonic sensor, which is designed for transmitting acoustic signals, in particular ultrasonic signals, and for receiving acoustic signals, in particular ultrasonic signals;
-控制单元,其构造为用于操控声学传感器;- a control unit configured to actuate the acoustic sensor;
-计算单元,其构造为用于分析评估所接收的声学回波信号并且根据所述分析评估确定周围环境的至少一个特性。- a computing unit, which is designed to analyze and evaluate the received acoustic echo signals and to determine at least one property of the surrounding environment based on the evaluation.
根据本发明设置,所述至少一个声学传感器可以这样布置在车辆的车底区域中,使得所发送的声学信号至少部分地被行车道表面反射到车辆周围环境的区域中。According to the invention, the at least one acoustic sensor can be arranged in the underbody area of the vehicle in such a way that the transmitted acoustic signal is at least partially reflected by the road surface into the area of the vehicle surroundings.
根据本发明的另一方面,提出一种具有这种设备的车辆。According to another aspect of the present invention, a vehicle with such a device is proposed.
特别有利的是声学传感器在车辆的车底中这样的位置:在该位置中,传感器不超过车底覆盖件突出。因此,离地间隙得到保留并且传感器不会被行车道上的障碍物剐蹭。根据本发明,传感器表面,即传感器的辐射出声学信号并且接收经反射的声学信号的面(通常是膜片),不是平坦地被安装到车底的水平面中,而是相对于行车道表面这样倾斜地布置,使得相应的声锥至少部分地被行车道表面反射到车辆周围环境的区域中。Particularly advantageous is the position of the acoustic sensor in the underbody of the vehicle in which the sensor does not protrude beyond the underbody cover. As a result, ground clearance is preserved and the sensor is not scratched by obstacles in the roadway. According to the invention, the sensor surface, ie the surface of the sensor which radiates the acoustic signal and receives the reflected acoustic signal (usually the diaphragm), is not mounted flat in the horizontal plane of the vehicle floor, but relative to the road surface The oblique arrangement is such that the corresponding sound cone is at least partially reflected by the road surface into the region of the vehicle surroundings.
优选,围绕传感器面或膜片面还设置有喇叭筒(Trichter),该喇叭筒将所接收的回波信号引导至传感器面。喇叭筒例如可以以兽角状的形式成型。出于空间原因,所述兽角状的构件可以围绕自己本身卷起或折叠。因此,声音借助指数线路(Exponentialleitung)通过处于传感器和周围环境之间的在横截面中持续增大的声音通道被耦合。在此,优选使传感器的波阻抗匹配于周围空气的声音特征阻抗。由此,可以在回波定位时并从而在感测对象时实现更高的作用范围并且还可以更准确地区分道路状态。Preferably, a horn is also arranged around the sensor surface or the membrane surface, which horn directs the received echo signals to the sensor surface. The horn can, for example, be shaped like an animal horn. For space reasons, the horn-like element can be rolled or folded around itself. Therefore, the sound is coupled by means of the exponential line through the sound channel between the sensor and the surroundings, which increases continuously in cross-section. Here, it is preferable to match the wave impedance of the sensor to the acoustic characteristic impedance of the surrounding air. As a result, a higher range of coverage can be achieved during echo localization and thus during object sensing, and a more accurate distinction of road states can also be achieved.
在汽车中典型使用的声学传感器具有膜片作为传感器面,该膜片既用于产生声学信号又用于接收声学信号。为了产生声学信号,膜片被换能器元件激励发生振动,由此产生声学信号。为了接收声学信号,借助换能器元件来感测由入射的声音引起的膜片振动。在产生声学信号之后,在能够借助该膜片接收到进入的声学信号之前,膜片必须首先返回到静止状态中。从膜片激励结束直至达到静止状态的时长称为振动衰减时间(Ausschwingzeit)。膜片的振动衰减时间引起,特别靠近声学传感器的对象不能够被识别出或者仅能够以很低的可靠性被识别出。然而首先,在自主行驶开始之前应能够可靠地识别,例如在待驶过的轮胎轨迹或非常靠近车辆处是否存在对象,使得可以防止所述对象被辗过。因此例如在行驶开始前倚靠车辆的人员被识别到,以便因此可以避免该人被辗过。出于该原因,有利的是,在水平平面上尽量远地离开车辆轮廓向着中轴线方向移动声学传感器,使得传感器或者说传感器面或者说膜片与待识别的对象之间的间距大于用于对象识别的最小间距,该最小间距以已知的方式从传感器在发送声学信号之后的振动衰减时长得出。最小间距与传感器的结构以及发送频率和发送模式有关并且在常见的超声波传感器中例如可以为12cm至19cm。声学传感器优选这样布置在车辆的车底上,使得传感器面或者说传感器的膜片相对于车辆的外轮廓或者待驶过的轮胎轨迹具有确定的最小间距,其中,所述最小间距通过声学传感器的振动衰减时长来确定。Acoustic sensors typically used in automobiles have a diaphragm as sensor surface, which is used both for generating and receiving acoustic signals. To generate the acoustic signal, the diaphragm is excited by the transducer element to vibrate, thereby generating the acoustic signal. In order to receive acoustic signals, the diaphragm vibrations caused by the incident sound are sensed by means of transducer elements. After generating the acoustic signal, the diaphragm must first return to a resting state before the incoming acoustic signal can be received by means of the diaphragm. The time period from the end of the excitation of the diaphragm until the stationary state is reached is called the vibration damping time (Ausschwingzeit). Due to the vibration decay time of the diaphragm, objects that are particularly close to the acoustic sensor cannot be detected or can be detected only with low reliability. First, however, it should be possible to reliably detect, for example, the presence of objects in the tire tracks to be driven or very close to the vehicle before autonomous driving begins, so that they can be prevented from being run over. Thus, for example, a person leaning on the vehicle before the start of the journey is detected, so that the person can thus be prevented from being run over. For this reason, it is advantageous to move the acoustic sensor in the horizontal plane as far away from the vehicle contour as possible in the direction of the center axis, so that the distance between the sensor or the sensor surface or the membrane and the object to be detected is greater than that for the object. The identified minimum distance, which is derived in a known manner from the vibration damping time of the sensor after sending the acoustic signal. The minimum distance depends on the structure of the sensor as well as on the transmission frequency and transmission mode and can be, for example, 12 cm to 19 cm in conventional ultrasonic sensors. The acoustic sensor is preferably arranged on the underbody of the vehicle in such a way that the sensor surface or the membrane of the sensor has a defined minimum distance from the outer contour of the vehicle or the track of the tires to be driven, wherein the minimum distance is determined by the acoustic sensor. The vibration damping time is determined.
优选,声学传感器布置在车底覆盖件的缺口中和/或车辆的车底上的加强元件上。因此有利地,车底防护板中的已存在的凹槽和表面部分(它们的法向向量大致指向希望的传播方向)可以被选择为传感器位置。在此,用于形成可选的喇叭筒的偏移(Abweichung)也比在平行于行车道定向的表面上更容易实现,由此,必须实现用于喇叭筒的附加的大凹槽。有利地,选择很少受如在发动机和废气系统附近出现的大的温度波动影响的安装位置。由此,可以实现传感器的更好的抗疲劳强度。Preferably, the acoustic sensor is arranged in a recess in the underbody cover and/or on a reinforcing element on the underbody of the vehicle. Advantageously, therefore, existing grooves and surface portions in the underbody fenders, whose normal vectors point approximately in the desired direction of propagation, can be selected as sensor locations. Here, too, the offset for forming the optional horn is easier to implement than on surfaces oriented parallel to the roadway, as a result of which additional large grooves for the horn must be implemented. Advantageously, a mounting location is chosen that is less affected by large temperature fluctuations as occurs in the vicinity of the engine and exhaust system. Thereby, a better fatigue resistance of the sensor can be achieved.
优选,多个声学传感器布置在车辆的车底上,其中,至少一个第一传感器布置在车辆的车底上的车辆前部区域中,并且至少一个第二传感器布置在车辆的车底上的车辆后部区域中。至少一个第三传感器布置在车辆的车底上的车辆第一侧面区域中,至少一个第四传感器布置在车辆的车底上的车辆第二侧面区域中。通过这种布置,得到车辆周围环境被声学传感器很大程度完全覆盖。Preferably, a plurality of acoustic sensors are arranged on the underbody of the vehicle, wherein at least one first sensor is arranged in the vehicle front region on the underbody of the vehicle, and at least one second sensor is arranged at the vehicle underbody of the vehicle in the rear area. At least one third sensor is arranged on the underbody of the vehicle in the region of the first side of the vehicle, and at least one fourth sensor is arranged in the region of the second side of the vehicle on the underbody of the vehicle. With this arrangement, it is obtained that the surroundings of the vehicle are largely completely covered by the acoustic sensor.
通过本发明尤其得到以下优点:The following advantages are obtained in particular by the present invention:
-传感器在观察车辆时从常见位置看不可见并且由此不会限制车辆的设计。- The sensor is not visible from common positions when viewing the vehicle and thus does not limit the design of the vehicle.
-本发明的方法或者设备的功能能力与车辆设计无关,由此在将该系统应用到不同车辆变型方案中时降低了成本。- The functional capability of the method or the device of the invention is independent of the vehicle design, thereby reducing costs when applying the system to different vehicle variants.
-车辆制造者在构型可见的车辆外壳时获得自由度,其方式是,可以将声学传感器从可见的保险杠区域转移到不可见的车底区域中。- The vehicle manufacturer gains degrees of freedom in the configuration of the visible vehicle shell in that the acoustic sensor can be transferred from the visible bumper region into the invisible underbody region.
-声学传感器更好地受到保护以防泊车剐蹭和破坏。-Acoustic sensors are better protected from parking scratches and vandalism.
-通过使用安装在车辆上的更高位置处的另外的声学传感器,可以总体上提高作用范围,因为在行车道表面上反射的信号分量增大并且尤其在借助位置较高的传感器与安装高度较低的声学传感器进行的组合式分析评估的情况下发生正干涉的机会增大。- By using additional acoustic sensors mounted higher on the vehicle, the range of action can be increased overall, since the signal component reflected on the road surface is increased and, in particular, with the aid of the higher sensor compared to the mounting height The chance of positive interference occurring increases in the case of combined analytical evaluations performed by low acoustic sensors.
-声学传感器在附近区域中的打开角度更大,因为在行车道表面发生散射的声音分量随着更低的高度而增大。- The opening angle of the acoustic sensor is greater in the vicinity, since the sound component scattered at the surface of the roadway increases with lower heights.
-失明探测(也就是说识别各个传感器是否有缺陷或受污)更稳健,因为地面和车辆部件返回更清楚的回波和多次回波,所述多次回波可以被考虑用于比较测量。- Blindness detection (that is to say identifying whether individual sensors are defective or contaminated) is more robust, as ground and vehicle components return clearer echoes and multiple echoes that can be considered for comparative measurements.
-能够使用加强声音的喇叭筒,由此普遍能够实现声学传感器的更高灵敏度并且附加地能够实现更强的对焦并从而能够实现明显更高的作用范围。- A loudspeaker that intensifies the sound can be used, whereby in general a higher sensitivity of the acoustic sensor and additionally a stronger focus and thus a significantly higher range can be achieved.
-可以在紧邻进行反射的行车道表面附近实现特别有效和可靠的对象识别,因为既可以通过直接回波又可以通过间接地经由道路表面反射的回波来识别这些对象。- A particularly effective and reliable object recognition can be achieved in the immediate vicinity of the road surface which is reflecting, since these objects can be detected both by direct echoes and by indirect echoes reflected via the road surface.
-与没有安装在车底中的传感器一起,也可以通过三角测量计算对象的高度位置。因此可以更好地区分可驶越的障碍物和不能驶越的障碍物。- Together with sensors not installed in the underbody, the height position of objects can also be calculated by triangulation. It is thus possible to better distinguish between obstacles that can be passed and obstacles that cannot be passed.
-针对由特殊的行车道结构例如井盖引起的所谓的伪对象(Geisterobjekt)的感测稳健性更高。因为远离的井盖对于没有安装在车底上的声学传感器而言常常显现为一个对象并且从而错误地显现为障碍物。- Higher sensing robustness against so-called pseudo-objects caused by special roadway structures such as manhole covers. For acoustic sensors that are not mounted on the vehicle floor, the remote manhole cover often appears as an object and thus erroneously appears as an obstacle.
-也可以识别以非常小的间距紧靠车辆的对象或者与车辆接触的对象。- It is also possible to detect objects that are in close proximity to the vehicle or that are in contact with the vehicle.
附图说明Description of drawings
图1以正视图示意性示出根据本发明第一实施例的车辆。Figure 1 schematically shows a vehicle according to a first embodiment of the invention in a front view.
图2以正视图示意性示出根据本发明第二实施例的车辆。Figure 2 schematically shows a vehicle according to a second embodiment of the invention in a front view.
图3以正视图示意性示出根据本发明第三实施例的车辆。Figure 3 schematically shows a vehicle according to a third embodiment of the invention in a front view.
图4以正视图示意性示出根据本发明第四实施例的车辆。Figure 4 schematically shows a vehicle according to a fourth embodiment of the invention in a front view.
图5示意性示出根据本发明第五实施例的车辆的车底视图。FIG. 5 schematically shows a bottom view of a vehicle according to a fifth embodiment of the present invention.
图6带有用于根据本发明的声学传感器的安装位置地示意性示出机动车的典型车底。FIG. 6 schematically shows a typical underbody of a motor vehicle with mounting positions for the acoustic sensor according to the invention.
参照附图详细说明本发明的实施方式。Embodiments of the present invention will be described in detail with reference to the accompanying drawings.
在下面对本发明实施例的说明中,相同元件用相同的附图标记标注,其中,必要时省去对这些元件的重复说明。附图仅示意性示出本发明的主题。In the following description of the embodiments of the present invention, the same elements are denoted by the same reference numerals, wherein the repeated description of these elements is omitted if necessary. The drawings show only schematically the subject-matter of the invention.
具体实施方式Detailed ways
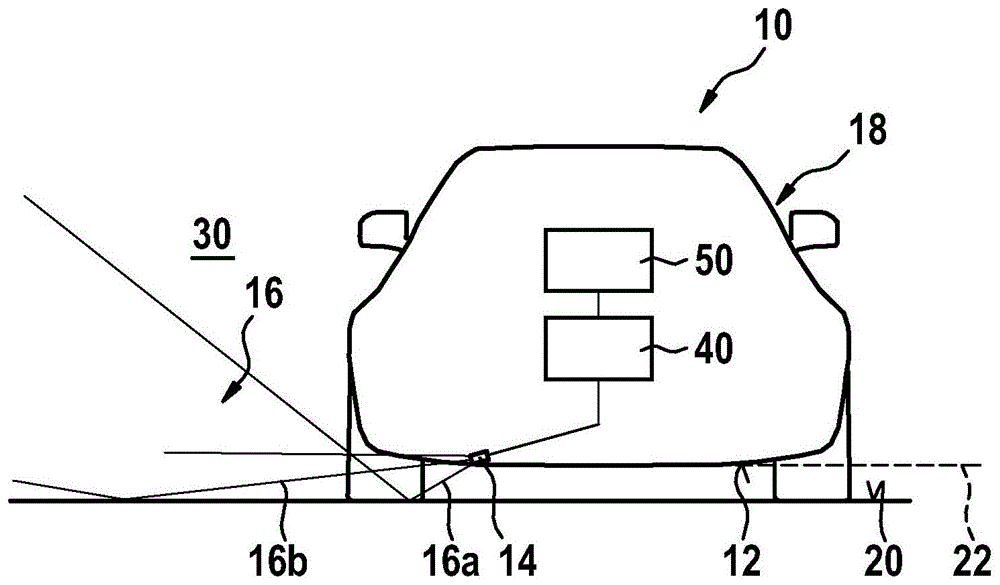
图1以正视图示出车辆10。该车辆具有构造为超声波传感器的声学传感器14,该声学传感器布置在车辆10的车底12上。受车辆束缚的声学传感器14这样固定在车辆10的车底12上,使得该声学传感器不超过车辆10的外轮廓18突出。声学传感器14相对于车辆10的车底平面22这样倾斜,使得由传感器14发送的声学信号16至少部分地被行车道表面20反射到车辆的周围环境30中。超声波传感器通常将声音发送到大致呈锥形的区域中。在该示图中,所发送的信号16通过限界声锥的线16a和16b示意性示出。由于所发送的信号16在行车道表面20上发生反射,声锥扩大,从而引起测量作用范围的提高。可以从整个声锥接收回波信号。回波信号返回到传感器14,其方式是,回波信号必要时再次在行车道表面20上发生反射。因此,所示系统例如感测车辆10的周围环境30中的对象和/或通过对由行车道20产生的回波信号进行分析评估来确定当前的行车道状态。为此,设置控制单元40,其构造为用于操控声学传感器14,以及设置计算单元50,其构造为用于分析评估所接收的声学回波信号并且根据所述分析评估确定周围环境30的至少一个特性。FIG. 1 shows the
图2以正视图示出车辆10。该车辆具有构造为超声波传感器的声学传感器14,该声学传感器布置在车辆10的车底12上。与根据图1的实施例相比,在该实施例中,这样选择传感器14的安装地点和安装角度亦或倾角,使得由传感器14发送的声学信号16部分地被行车道表面20反射到车辆的周围环境30中并且部分地被直接发送到车辆10的周围环境30中。为此,在根据图1的实施例中选择较小的安装角以及较靠近车辆的外轮廓18的安装地点。在此,传感器14的安装角亦或倾角指的是车底平面22和声学传感器14的主辐射方向之间的角度。在车辆10的周围环境30中存在对象80。该对象80可以通过以下方式被识别出:对所发送的声学信号的第一信号组成部分16c的第一回波信号进行分析评估,其中,第一信号组成部分16c在其碰到对象80之前在行车道表面20上发生反射。此外,对所发送的声学信号16的第二信号组成部分16d的第二回波信号进行分析评估,其中,第二信号组成部分16d直接碰到对象80。通过这种布置,该信号可以通过正叠加被增强,并且尤其在例如在道路潮湿和速度高的情况下由轮胎产生的周围环境噪声强的情况下仍能感测到远处的对象或弱反射的对象的回波。FIG. 2 shows the
图3以正视图示出车辆10。该车辆具有构造为超声波传感器的声学传感器14,该声学传感器布置在车辆10的车底12上,具体而言以与在图1中所示相同的方式布置。附加地,在该实施例中,车辆10在车辆10的侧面25上还具有第二声学传感器44。该声学传感器14相对于车辆10的车底平面22这样倾斜,使得由传感器14发送的声学信号16至少部分地被行车道表面20反射到车辆的周围环境30中。例如在行车道表面的区域26中由该行车道表面产生的回波信号46返回到第一声学传感器14并且可以借助计算单元50被分析评估。附加地,通过到达行车道表面20上的声音,第二回波信号46被反射至第二声学传感器44。借助计算单元50也可以分析评估第二回波信号46。通过组合式分析评估,可以获得关于行车道表面20在区域26中的当前状态的准确信息。FIG. 3 shows the
在车辆10的周围环境30中还存在对象80。该对象80可以通过以下方式被识别到:通过声学传感器14接收所发送的声学信号16的第一回波信号36’并且接下来通过计算单元50分析评估该回波信号,其中,回波信号36’在其碰到传感器14之前被行车道表面20反射。该计算单元例如可以确定信号的渡越时间。此外,所发送的声学信号16的第二回波信号46’由接收器44接收并且也被计算单元50分析评估,其中,也可以组合式地分析评估两个回波信号36’和46’。尤其,通过这种布置不仅可以确定相对于处于车辆10的周围环境30中的对象80的间距,而且还可以确定该对象80相对于声学传感器14和44的高度和/或相对位置。
图4以正视图示出车辆10。该车辆具有构造为超声波传感器的声学传感器14,该声学传感器布置在车辆10的车底12上。与根据图1的实施例相比,在该实施例中,传感器14的安装地点向车辆中轴线11的方向被移动。由此得到以下优点:也可以可靠地识别非常靠近车辆10的对象,因为相对于声学传感器14的间距始终足够大,使得在声学传感器14的传感器膜片的振动衰减时长之后这样的对象的回波信号才碰到传感器14。FIG. 4 shows the
在本发明的在图5中示出的实施例中,例如可以构造为超声波传感器的多个声学传感器14a,14b,14c,14d布置在车辆的车底上。在此,在车辆10的车底12上,五个传感器14a布置在车辆10的前部区域中。这五个传感器14a相对于车辆纵轴线13以不同的角度取向,并因此以其测量范围面状地覆盖处于车辆10前方的区域。以类似的方式,在车辆10的车底12上,另外五个超声传感器14b还布置在车辆10的后部区域中。这些传感器14b也相对于车辆纵轴线13以不同的角度取向,并因此以其测量范围面状地覆盖处于车辆10后方的区域。在车辆10的车底12上,另外三个传感器14c布置在车辆10的第一侧面区域中。这三个传感器14c相对于车辆横轴线17以不同的角度取向,并因此以其测量范围面状地覆盖处于车辆右侧的区域。在车辆10的车底12上,另外三个传感器14d布置在车辆10的第二侧面区域中。这三个传感器14d同样相对于车辆横轴线17以不同的角度取向,并因此以其测量范围面状地覆盖处于车辆10左侧的区域。In the embodiment of the invention shown in FIG. 5 , a plurality of
位于所述传感器之一的声锥区域内的车辆部件,例如车轮15,产生持续的回波信号,并且部分地产生多次回波。这些部件由于是已知的而可以在识别对象时被隐没(ausblenden),但是它们可以被用于失明探测(Blindheitsdetektion),以便例如识别由于污染而对传感器作用范围的不利影响,并且必要时也能够补偿所述不利影响。Vehicle components, such as
在图6中示出典型的机动车10的车底12。车底12以已知的方式具有车底覆盖件64和各自不同的遮盖元件65并具有加强元件66、声音衰减元件69和流动成形元件68。这些元件又可以具有或构成缺口62,所述缺口适用于容纳声学传感器14,以便构造本发明的设备。The
Claims (16)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102018221517.0A DE102018221517A1 (en) | 2018-12-12 | 2018-12-12 | Method and device for detecting a road surface |
| DE102018221517.0 | 2018-12-12 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111308475A true CN111308475A (en) | 2020-06-19 |
| CN111308475B CN111308475B (en) | 2024-06-04 |
Family
ID=70858736
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201911272995.6A Active CN111308475B (en) | 2018-12-12 | 2019-12-12 | Method and device for sensing the surroundings of a vehicle and vehicle having such a device |
Country Status (2)
| Country | Link |
|---|---|
| CN (1) | CN111308475B (en) |
| DE (1) | DE102018221517A1 (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102020213492A1 (en) | 2020-10-27 | 2022-04-28 | Robert Bosch Gesellschaft mit beschränkter Haftung | Method and device for detecting a road surface |
| DE102021121854A1 (en) | 2021-08-24 | 2023-03-02 | Valeo Schalter Und Sensoren Gmbh | PROCEDURE FOR MONITORING A GROUND CLEARANCE |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040201462A1 (en) * | 2001-05-04 | 2004-10-14 | Markus Hartlieb | Sensor system for determination of environment for motor vehicles |
| CN104094134A (en) * | 2012-01-19 | 2014-10-08 | 罗伯特·博世有限公司 | Method and environment detection device for determining the position and/or the movement of at least one object in the environment of vehicle by means of acoustic signals reflected by the object |
| CN104412121A (en) * | 2012-06-29 | 2015-03-11 | 罗伯特·博世有限公司 | Method for operating a surrounding environment detecting system of a vehicle and surrounding environment detecting system |
| DE102014224605A1 (en) * | 2014-03-31 | 2015-10-01 | Mitsubishi Electric Corporation | Vehicle ultrasonic sensor |
| CN105321353A (en) * | 2014-06-24 | 2016-02-10 | 罗伯特·博世有限公司 | Method for detecting a roadway and corresponding detection systems |
| DE102015106402A1 (en) * | 2015-04-27 | 2016-10-27 | Valeo Schalter Und Sensoren Gmbh | Method for detecting a state of a roadway based on an echo signal of an ultrasonic sensor, sensor arrangement, driver assistance system and motor vehicle |
| DE102015106403A1 (en) * | 2015-04-27 | 2016-10-27 | Valeo Schalter Und Sensoren Gmbh | Method for detecting a state of a roadway based on an echo signal of an ultrasonic sensor, sensor arrangement, driver assistance system and motor vehicle |
| CN106537175A (en) * | 2014-07-09 | 2017-03-22 | 罗伯特·博世有限公司 | Device and method for the acoustic examination of objects in the environment of a means of conveyance |
| DE102017120670B3 (en) * | 2017-09-07 | 2018-11-29 | Valeo Schalter Und Sensoren Gmbh | Method for detecting the height of an object in an environmental area of a vehicle with an underbody sensor and driver assistance system |
| DE102017111932A1 (en) * | 2017-05-31 | 2018-12-06 | Valeo Schalter Und Sensoren Gmbh | A method of operating an ultrasonic sensor device for a motor vehicle for monitoring a floor area below the motor vehicle, ultrasonic sensor device, driver assistance system and motor vehicle |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102014221990B4 (en) | 2014-10-29 | 2021-08-12 | Robert Bosch Gmbh | Device and method for avoiding damage to a vehicle |
-
2018
- 2018-12-12 DE DE102018221517.0A patent/DE102018221517A1/en active Pending
-
2019
- 2019-12-12 CN CN201911272995.6A patent/CN111308475B/en active Active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040201462A1 (en) * | 2001-05-04 | 2004-10-14 | Markus Hartlieb | Sensor system for determination of environment for motor vehicles |
| CN104094134A (en) * | 2012-01-19 | 2014-10-08 | 罗伯特·博世有限公司 | Method and environment detection device for determining the position and/or the movement of at least one object in the environment of vehicle by means of acoustic signals reflected by the object |
| CN104412121A (en) * | 2012-06-29 | 2015-03-11 | 罗伯特·博世有限公司 | Method for operating a surrounding environment detecting system of a vehicle and surrounding environment detecting system |
| DE102014224605A1 (en) * | 2014-03-31 | 2015-10-01 | Mitsubishi Electric Corporation | Vehicle ultrasonic sensor |
| CN105321353A (en) * | 2014-06-24 | 2016-02-10 | 罗伯特·博世有限公司 | Method for detecting a roadway and corresponding detection systems |
| CN106537175A (en) * | 2014-07-09 | 2017-03-22 | 罗伯特·博世有限公司 | Device and method for the acoustic examination of objects in the environment of a means of conveyance |
| DE102015106402A1 (en) * | 2015-04-27 | 2016-10-27 | Valeo Schalter Und Sensoren Gmbh | Method for detecting a state of a roadway based on an echo signal of an ultrasonic sensor, sensor arrangement, driver assistance system and motor vehicle |
| DE102015106403A1 (en) * | 2015-04-27 | 2016-10-27 | Valeo Schalter Und Sensoren Gmbh | Method for detecting a state of a roadway based on an echo signal of an ultrasonic sensor, sensor arrangement, driver assistance system and motor vehicle |
| DE102017111932A1 (en) * | 2017-05-31 | 2018-12-06 | Valeo Schalter Und Sensoren Gmbh | A method of operating an ultrasonic sensor device for a motor vehicle for monitoring a floor area below the motor vehicle, ultrasonic sensor device, driver assistance system and motor vehicle |
| DE102017120670B3 (en) * | 2017-09-07 | 2018-11-29 | Valeo Schalter Und Sensoren Gmbh | Method for detecting the height of an object in an environmental area of a vehicle with an underbody sensor and driver assistance system |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111308475B (en) | 2024-06-04 |
| DE102018221517A1 (en) | 2020-06-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106461779B (en) | Method for detecting a blocking state of an ultrasonic sensor of a motor vehicle, ultrasonic sensor device and motor vehicle | |
| US10859697B2 (en) | Method for detecting an object in a surrounding region of a motor vehicle with the aid of an ultrasonic sensor with improved filtering of ground reflections, control device, ultrasonic sensor apparatus and motor vehicle | |
| CN100504438C (en) | Method and device for detecting objects in a motor vehicle environment | |
| CN103930794B (en) | Method for operating a sensor | |
| US20210018621A1 (en) | Ultrasonic sensor system and method for detecting objects in the environment of a vehicle, and vehicle having an ultrasonic sensor system | |
| CN114207469B (en) | Method for classifying objects in the surroundings of a vehicle and driver assistance system | |
| US10254390B2 (en) | Method for operating an ultrasonic sensor apparatus of a motor vehicle, ultrasonic sensor apparatus, and motor vehicle | |
| CN110568444B (en) | Method for detecting obstacles by reflecting ultrasonic waves | |
| US12228688B2 (en) | Method and a device for classifying an object, in particular in the surroundings of a motor vehicle | |
| JP7602024B2 (en) | Method for characterizing objects in the vicinity of a vehicle - Patents.com | |
| CN111308475B (en) | Method and device for sensing the surroundings of a vehicle and vehicle having such a device | |
| JP6942254B2 (en) | Obstacle detection device or driving support device | |
| US12339358B2 (en) | Method for operating an ultrasonic sensor device for monitoring an underbody region of a motor vehicle, computer program product, computer-readable storage medium, and ultrasonic sensor device | |
| US11391827B2 (en) | Method for the improved detection of a ground echo signal in an ultrasonic sensor of a vehicle | |
| US7084745B2 (en) | Sensor system for determination of environment for motor vehicles | |
| CN101169479A (en) | Reversing radar for preventing misjudgment and method thereof | |
| CN101375180A (en) | Apparatus and method for supporting a vehicle parking process | |
| JP7719953B2 (en) | Method for characterizing objects in the vicinity of a motorized vehicle - Patents.com | |
| CN113950629B (en) | Method for high-level classification of objects in the vehicle's surroundings and driver assistance system | |
| US11789145B2 (en) | Method and apparatus for detecting at least partial flooding of a motor vehicle | |
| CN115552283A (en) | Method for detecting traffic jam conditions in motor vehicles | |
| JP7525232B2 (en) | OBJECT DETECTION DEVICE, VEHICLE, AND METHOD FOR SETTING WAVE-RECEPTION PERIOD IN OBJECT DETECTION DEVICE | |
| JP7554029B2 (en) | Object detection device, vehicle, and method for setting detection sensitivity in object detection device | |
| JPWO2022068999A5 (en) | ||
| GB2486558A (en) | Parking aid which estimates a distance to the curb from vehicle width plus lateral offset to a parked vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |