CN109028234B - 一种能够对烟雾等级进行标识的油烟机 - Google Patents
一种能够对烟雾等级进行标识的油烟机 Download PDFInfo
- Publication number
- CN109028234B CN109028234B CN201811152666.3A CN201811152666A CN109028234B CN 109028234 B CN109028234 B CN 109028234B CN 201811152666 A CN201811152666 A CN 201811152666A CN 109028234 B CN109028234 B CN 109028234B
- Authority
- CN
- China
- Prior art keywords
- smoke
- area
- image
- picture
- frame
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24C—DOMESTIC STOVES OR RANGES ; DETAILS OF DOMESTIC STOVES OR RANGES, OF GENERAL APPLICATION
- F24C15/00—Details
- F24C15/20—Removing cooking fumes
- F24C15/2021—Arrangement or mounting of control or safety systems
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Closed-Circuit Television Systems (AREA)
- Image Analysis (AREA)
Abstract
一种能够对烟雾等级进行标识的油烟机,能够对烟雾等级进行标识的油烟机,视觉成像模块对灶台目标区域进行连续成像,并将成像图片发送至处理模块;处理模块接收视觉成像模块发送的成像图片并进行处理得到烟雾浓度等级,并根据烟雾浓度等级进行烟雾区域标识。能够对油烟进行分割,具有分割准确,分割效率高的特点,可应用于厨房油烟浓度识别,公共场合烟雾浓度识别等领域。
Description
技术领域
本发明涉及厨房油烟处理技术领域,特别是涉及一种能够对烟雾等级进行标识的油烟机。
背景技术
厨房是居家必备的配置之一,厨房油烟处理的效果直接影响人们的生活品质。传统吸抽油烟机通常都是设置按键控制风机进行抽风,不能自动判断灶台上方的油烟情况。
现有技术中,针对厨房油烟浓度的检测,主要有红外投射法和物理检测法。红外投射法通过一端发射红外光,另一端进行接收,通过接收到的红外光强度来判断油烟浓度大小。但是,由于油烟飘散具有不确定性,实际中还会存在人手遮挡等干扰,故,需在不同位置安装多个红外发射器才能保证油烟检测的相对准确,成本较高,对安装位置要求也较高。物理检测法类似于烟雾报警器的原理,通过检测空气中漂浮颗粒数来判断油烟浓度,但此法有两个缺点,一是必须当油烟接触到报警器时才能进行检测,不能实现远距离检测;二是当空气中飘浮的不是油烟而是水雾时就无法检测。
油烟图像浓度判断的关键在于对油烟图像的处理效果。图像分割是指根据相似和均匀的准则将图像分为互相不重叠、本身相连的图像组元的过程,是从图像处理到图像分析的关键步骤,图像分割质量的好坏,很大程度决定着后续图像分析的效果。现阶段无论是对彩色还是灰度图像的分割,通常是人为地将想要提取的颜色所对应的图像区域标记出来,再将标记出的图像区域与图像所在的坐标系统进行转换,从而确定出提取颜色所对应的图像区域的坐标位置,再根据坐标对标记出的区域进行分析处理。然而通过人工的方式确定出的标记区域会存在较大误差,对图像采集设备的稳定性的成像系统的精度也会造成影响,同时人工的方式效率并不高,极易受到干扰而出现标记错误和处理误差。
因此,针对现有技术不足,提供一种能够能够对烟雾等级进行标识的油烟机以克服现有技术不足甚为必要。
发明内容
本发明的目的在于避免现有技术的不足之处而提供一种能够对烟雾等级进行标识的油烟机,能够对灶台区域的烟雾等级进行分割标注显示。
本发明的目的通过以下技术措施实现。
提供一种能够对烟雾等级进行标识的油烟机,视觉成像模块对灶台目标区域进行连续成像,并将成像图片发送至处理模块;
处理模块接收视觉成像模块发送的成像图片并进行处理得到烟雾浓度等级,并根据烟雾浓度等级进行烟雾区域标识。
优选的,上述处理模块将所接收的成像图片按照成像时刻和帧序进行标记,第y帧成像图片P对应的成像时刻是Ty、对应的帧序是y,y为自然数;
相机采集的灶台目标区域以区域S表示,将灶台目标区域分成左烟雾区域、中间无烟雾区域和右烟雾区域,左烟雾区域以区域L表示,右烟雾区域以区域R表示;任意一帧成像图片为对应区域S的成像,每一帧成像图片对应区域L的部分命名为左图片,对应区域R的部分命名为右图片;
处理模块采集当前帧成像图片对应的左图片作为左图片对象、采集当前帧成像图片对应的右图片作为右图片对象,分别提取左图片对象、右图片对象的烟雾特征;
分别对左图片对象、右图片对象进行烟雾等级判断,并根据烟雾浓度等级结果分别对左图片对象、右图片对象进行烟雾区域标识。
优选的,上述的能够对烟雾等级进行标识的油烟机,对左图片对象进行烟雾等级判断的方法与对右图片对象进行烟雾等级判断的方法相同。
优选的,上述处理模块通过背景模型帧差法得到左图片对象的当前烟雾区域及当前烟雾区域对应的浓度。
优选的,左图片对象P由m*n个像素构成,左图片对象P的像素灰度值以矩阵PH表示,PH={Phi,j},phi,j代表左图片对象P中第i行、第j列像素对应的灰度值,m、n均为自然数,1≤i≤m,1≤j≤n;
所述处理模块通过背景模型帧差法得到左图片对象的当前烟雾区域及当前烟雾区域对应的浓度,并根据烟雾浓度结果对左图片对象进行烟雾区域标识,具体是这样处理的:
a.背景建模
选取连续F帧成像图片对应的左图片作为背景建模采样图像组,选取背景建模采样图像中每个像素点处的灰度最小值,组成背景模型图像M;
背景建模采样图像组包括背景建模采样图像B1、背景建模采样图像B2、......、背景建模采样图像BF,F为自然数且F不小于3,当前帧成像图片的帧序大于任意一个背景建模采样图像的帧序;
背景建模采样图像B1的像素灰度值以矩阵B1H表示,B1H={b1hi,j},b1hi,j代表背景建模采样图像B1中第i行、第j列像素对应的灰度值;
背景建模采样图像B2的像素灰度值以矩阵B2H表示,B2H={b2hi,j},b2hi,j代表背景建模采样图像B2中第i行、第j列像素对应的灰度值;
......
背景建模采样图像BF的像素灰度值以矩阵BFH表示,BFH={bFhi,j},bFhi,j代表背景建模采样图像BF中第i行、第j列像素对应的灰度值;
背景模型图像M的像素灰度值以矩阵MH表示,MH={mhi,j},mhi,j代表背背景模型图像M中第i行、第j列像素对应的灰度值;
mhi,j=min(b1hi,j、b2hi,j、......、bFhi,j);
b.做差处理
将左图片对象与背景模型图像M做差,得到左图片对象烟雾的区域与浓度,再根据烟雾的区域与浓度进行区域分割标识。
优选的,将左图片对象与背景模型图像M做差,得到当前帧成像图片的左图片烟雾的区域与浓度,再根据烟雾浓度进行烟雾区域分割标识,具体过程如下:
将左图片对象与与背景模型图像M进行帧差处理,得到帧差图像Z;
帧差图像Z的像素灰度值以矩阵ZH表示,ZH={zhi,j},zhi,j代表帧差图像Z中第i行、第j列像素对应的灰度值,
zhi,j={|phij-mhi,j|};
将帧差图像Z的灰度值为大于0且小于等于6.0范围的像素划为第一梯度区域,对应低油烟浓度区域;
将帧差图像Z的灰度值为大于6.0且小于等于12.0范围的像素划为第二梯度区域,对应中等油烟浓度区域;
将帧差图像Z的灰度值为大于12.0且小于等于20.0范围的像素划为第三梯度区域,对应高油烟浓度区域;
在左图片对象中分割出与第一梯度区域所对应的图像,使用单通道第一色彩标识,在目标图像中分割出与第二梯度区域所对应的图像,使用单通道第二色彩标识,在目标图像中分割出与第三梯度区域所对应的图像,使用单通道第三色彩标识,得到最终三色分割效果图。
优选的,上述的能够对烟雾等级进行标识的油烟机,第一色彩为绿色,第二色彩为蓝色,第三色彩为红色。
优选的,F大于等于10小于等于100。
优选的,连续F帧成像图片中帧数最大的图片与当前帧成像图片的帧序之间的差值不大于20。
优选的,连续F帧成像图片中帧数最大的图片与当前帧成像图片的帧序之间的差值不大于10。
本发明的能够对烟雾等级进行标识的油烟机,视觉成像模块对灶台目标区域进行连续成像,并将成像图片发送至处理模块;处理模块接收视觉成像模块发送的成像图片并进行处理得到烟雾浓度等级,并根据烟雾浓度等级进行烟雾区域标识。能够对油烟进行分割,具有分割准确,分割效率高的特点,可应用于厨房油烟浓度识别,公共场合烟雾浓度识别等领域。
说明书附图
利用附图对本发明作进一步的说明,但附图中的内容不构成对本发明的任何限制。
图1是通过本发明一种能够对烟雾等级进行标识的油烟机的结构示意图。
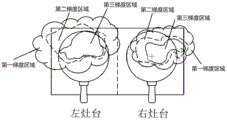
图2是通过本发明的方法对厨房双灶台油烟浓度灰度图像三色分割的效果示意图。
具体实施方式
结合以下实施例对本发明作进一步说明。
实施例1。
一种能够对烟雾等级进行标识的油烟机,视觉成像模块对灶台目标区域进行连续成像,并将成像图片发送至处理模块;
处理模块接收视觉成像模块发送的成像图片并进行处理得到烟雾浓度等级,并根据烟雾浓度等级进行烟雾区域标识。
视觉成像模块至少设置有相机,可以采用如图1所示的油烟机结构实现,相机200内置于烟机主体100的壳体,且相机的镜头正对灶台400目标区域,相机的输出端与处理模块电连接。相机用于对灶台区域进行拍摄成像,并将所拍摄的图片发送至处理模块进行处理。相机装配有防水、防雾、防烟镜片及防模糊玻璃,避免实际使用中烟罩上方的水汽、油烟对相机造成影响,防模糊玻璃能够确保相机在不同环境下都能够有效成像。处理模块可以为STM32型号的芯片。
需要说明的是,油烟机的视觉成像模块、处理模块不局限于附图1列举的情况,也可以根据需要灵活选择,在此不再赘述。
具体的,处理模块将所接收的成像图片按照成像时刻和帧序进行标记,第y帧成像图片P对应的成像时刻是Ty、对应的帧序是y,y为自然数。
相机采集的灶台目标区域以区域S表示,将灶台目标区域分成左烟雾区域、中间无烟雾区域和右烟雾区域,左烟雾区域以区域L表示,右烟雾区域以区域R表示;任意一帧成像图片为对应区域S的成像,每一帧成像图片对应区域L的部分命名为左图片,对应区域R的部分命名为右图片;
处理模块采集当前帧成像图片对应的左图片作为左图片对象、采集当前帧成像图片对应的右图片作为右图片对象,分别提取左图片对象、右图片对象的烟雾特征;
分别对左图片对象、右图片对象进行烟雾等级判断,并根据烟雾浓度等级结果分别对左图片对象、右图片对象进行烟雾区域标识。
其中,对左图片对象进行烟雾等级判断的方法与对右图片对象进行烟雾等级判断的方法相同。
以对左图片对象进行烟雾等级判断及分割为例,处理模块通过背景模型帧差法得到左图片对象的当前烟雾区域及当前烟雾区域对应的浓度。
左图片对象P由m*n个像素构成,左图片对象P的像素灰度值以矩阵PH表示,PH={Phi,j},phi,j代表左图片对象P中第i行、第j列像素对应的灰度值,m、n均为自然数,1≤i≤m,1≤j≤n。
处理模块通过背景模型帧差法得到左图片对象的当前烟雾区域及当前烟雾区域对应的浓度,并根据烟雾浓度结果对左图片对象进行烟雾区域标识,具体是这样处理的:
a.背景建模
选取连续F帧成像图片对应的左图片作为背景建模采样图像组,选取背景建模采样图像中每个像素点处的灰度最小值,组成背景模型图像M;优选的,F大于等于10小于等于100,连续F帧成像图片中帧数最大的图片与当前帧成像图片的帧序之间的差值不大于20,优选差值不大于10;
背景建模采样图像组包括背景建模采样图像B1、背景建模采样图像B2、......、背景建模采样图像BF,F为自然数且F不小于3,当前帧成像图片的帧序大于任意一个背景建模采样图像的帧序;
背景建模采样图像B1的像素灰度值以矩阵B1H表示,B1H={b1hi,j},b1hi,j代表背景建模采样图像B1中第i行、第j列像素对应的灰度值;
背景建模采样图像B2的像素灰度值以矩阵B2H表示,B2H={b2hi,j},b2hi,j代表背景建模采样图像B2中第i行、第j列像素对应的灰度值;
......
背景建模采样图像BF的像素灰度值以矩阵BFH表示,BFH={bFhi,j},bFhi,j代表背景建模采样图像BF中第i行、第j列像素对应的灰度值;
背景模型图像M的像素灰度值以矩阵MH表示,MH={mhi,j},mhi,j代表背背景模型图像M中第i行、第j列像素对应的灰度值;
mhi,j=min(b1hi,j、b2hi,j、......、bFhi,j)。
b.做差处理
将左图片对象与背景模型图像M做差,得到左图片对象烟雾的区域与浓度,再根据烟雾的区域与浓度进行区域分割标识,具体过程如下:
将左图片对象与与背景模型图像M进行帧差处理,得到帧差图像Z;
帧差图像Z的像素灰度值以矩阵ZH表示,ZH={zhi,j},zhi,j代表帧差图像Z中第i行、第j列像素对应的灰度值,
zhi,j={|phij-mhi,j|};
将帧差图像Z的灰度值为大于0且小于等于6.0范围的像素划为第一梯度区域,对应低油烟浓度区域;
将帧差图像Z的灰度值为大于6.0且小于等于12.0范围的像素划为第二梯度区域,对应中等油烟浓度区域;
将帧差图像Z的灰度值为大于12.0且小于等于20.0范围的像素划为第三梯度区域,对应高油烟浓度区域;
在左图片对象中分割出与第一梯度区域所对应的图像,使用单通道第一色彩标识,在目标图像中分割出与第二梯度区域所对应的图像,使用单通道第二色彩标识,在目标图像中分割出与第三梯度区域所对应的图像,使用单通道第三色彩标识,得到最终三色分割效果图。
本实施例中,第一色彩为绿色,第二色彩为蓝色,第三色彩为红色。需要说明的是,色彩的显示方式可以根据需要灵活设置,不局限于本实施例的情况。
图2示意图了通过本发明的方法得到的一种厨房油烟浓度三色分割结果示意图,从图中可以看出,本发明的方法能够准确将各个像素点出来的油烟等级进行划分。
本发明能够对油烟进行分割,具有分割准确,分割效率高的特点,可应用于厨房油烟浓度识别,公共场合烟雾浓度识别等领域。
最后应当说明的是,以上实施例仅用以说明本发明的技术方案而非对本发明保护范围的限制,尽管参照较佳实施例对本发明作了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的实质和范围。
Claims (6)
1.一种能够对烟雾等级进行标识的油烟机,其特征在于,视觉成像模块对灶台目标区域进行连续成像,并将成像图片发送至处理模块;
处理模块接收视觉成像模块发送的成像图片并进行处理得到烟雾浓度等级,并根据烟雾浓度等级进行烟雾区域标识;
所述处理模块将所接收的成像图片按照成像时刻和帧序进行标记,第y帧成像图片P对应的成像时刻是Ty、对应的帧序是y,y为自然数;
相机采集的灶台目标区域以区域S表示,将灶台目标区域分成左烟雾区域、中间无烟雾区域和右烟雾区域,左烟雾区域以区域L表示,右烟雾区域以区域R表示;任意一帧成像图片为对应区域S的成像,每一帧成像图片对应区域L的部分命名为左图片,对应区域R的部分命名为右图片;
处理模块采集当前帧成像图片对应的左图片作为左图片对象、采集当前帧成像图片对应的右图片作为右图片对象,分别提取左图片对象、右图片对象的烟雾特征;
分别对左图片对象、右图片对象进行烟雾等级判断,并根据烟雾浓度等级结果分别对左图片对象、右图片对象进行烟雾区域标识;
对左图片对象进行烟雾等级判断的方法与对右图片对象进行烟雾等级判断的方法相同;
所述处理模块通过背景模型帧差法得到左图片对象的当前烟雾区域及当前烟雾区域对应的浓度;
左图片对象P由m*n个像素构成,左图片对象P的像素灰度值以矩阵PH表示,PH={Phi,j},phi,j代表左图片对象P中第i行、第j列像素对应的灰度值,m、n均为自然数,1≤i≤m,1≤j≤n;
所述处理模块通过背景模型帧差法得到左图片对象的当前烟雾区域及当前烟雾区域对应的浓度,并根据烟雾浓度结果对左图片对象进行烟雾区域标识,具体是这样处理的:
a.背景建模
选取连续F帧成像图片对应的左图片作为背景建模采样图像组,选取背景建模采样图像中每个像素点处的灰度最小值,组成背景模型图像M;
背景建模采样图像组包括背景建模采样图像B1、背景建模采样图像B2、......、背景建模采样图像BF,F为自然数且F不小于3,当前帧成像图片的帧序大于任意一个背景建模采样图像的帧序;
背景建模采样图像B1的像素灰度值以矩阵B1H表示,B1H={b1hi,j},b1hi,j代表背景建模采样图像B1中第i行、第j列像素对应的灰度值;
背景建模采样图像B2的像素灰度值以矩阵B2H表示,B2H={b2hi,j},b2hi,j代表背景建模采样图像B2中第i行、第j列像素对应的灰度值;
......
背景建模采样图像BF的像素灰度值以矩阵BFH表示,BFH={bFhi,j},bFhi,j代表背景建模采样图像BF中第i行、第j列像素对应的灰度值;
背景模型图像M的像素灰度值以矩阵MH表示,MH={mhi,j},mhi,j代表背景模型图像M中第i行、第j列像素对应的灰度值;
mhi,j=min(b1hi,j、b2hi,j、......、bFhi,j);
b.做差处理
将左图片对象与背景模型图像M做差,得到左图片对象烟雾的区域与浓度,再根据烟雾的区域与浓度进行区域分割标识。
2.根据权利要求1所述的能够对烟雾等级进行标识的油烟机,其特征在于,
将左图片对象与背景模型图像M做差,得到当前帧成像图片的左图片烟雾的区域与浓度,再根据烟雾浓度进行烟雾区域分割标识,具体过程如下:
将左图片对象与背景模型图像M进行帧差处理,得到帧差图像Z;
帧差图像Z的像素灰度值以矩阵ZH表示,ZH={zhi,j},zhi,j代表帧差图像Z中第i行、第j列像素对应的灰度值,
zhi,j={|phij-mhi,j|};
将帧差图像Z的灰度值为大于0且小于等于6.0范围的像素划为第一梯度区域,对应低油烟浓度区域;
将帧差图像Z的灰度值为大于6.0且小于等于12.0范围的像素划为第二梯度区域,对应中等油烟浓度区域;
将帧差图像Z的灰度值为大于12.0且小于等于20.0范围的像素划为第三梯度区域,对应高油烟浓度区域;
在左图片对象中分割出与第一梯度区域所对应的图像,使用单通道第一色彩标识,在目标图像中分割出与第二梯度区域所对应的图像,使用单通道第二色彩标识,在目标图像中分割出与第三梯度区域所对应的图像,使用单通道第三色彩标识,得到最终三色分割效果图。
3.根据权利要求2所述的能够对烟雾等级进行标识的油烟机,其特征在于,第一色彩为绿色,第二色彩为蓝色,第三色彩为红色。
4.根据权利要求3所述的能够对烟雾等级进行标识的油烟机,其特征在于,F大于等于10小于等于100。
5.根据权利要求4所述的能够对烟雾等级进行标识的油烟机,其特征在于,连续F帧成像图片中帧数最大的图片与当前帧成像图片的帧序之间的差值不大于20。
6.根据权利要求5所述的能够对烟雾等级进行标识的油烟机,其特征在于,连续F帧成像图片中帧数最大的图片与当前帧成像图片的帧序之间的差值不大于10。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201811152666.3A CN109028234B (zh) | 2018-09-29 | 2018-09-29 | 一种能够对烟雾等级进行标识的油烟机 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201811152666.3A CN109028234B (zh) | 2018-09-29 | 2018-09-29 | 一种能够对烟雾等级进行标识的油烟机 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN109028234A CN109028234A (zh) | 2018-12-18 |
| CN109028234B true CN109028234B (zh) | 2020-11-10 |
Family
ID=64615497
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201811152666.3A Active CN109028234B (zh) | 2018-09-29 | 2018-09-29 | 一种能够对烟雾等级进行标识的油烟机 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN109028234B (zh) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109579096B (zh) * | 2018-12-29 | 2023-06-13 | 佛山市云米电器科技有限公司 | 一种带温度传感器的油烟机 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107726399A (zh) * | 2017-11-07 | 2018-02-23 | 佛山市云米电器科技有限公司 | 油烟收集系统、方法及装置 |
| CN108548199A (zh) * | 2018-03-08 | 2018-09-18 | 佛山市云米电器科技有限公司 | 一种智能抽油烟机风速调级方法及装置 |
| CN108550159A (zh) * | 2018-03-08 | 2018-09-18 | 佛山市云米电器科技有限公司 | 一种基于图像三色分割的烟气浓度标识方法 |
| CN108563991A (zh) * | 2018-03-08 | 2018-09-21 | 佛山市云米电器科技有限公司 | 厨房油烟浓度划分方法及油烟浓度检测与干扰排除方法 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ES2727929T3 (es) * | 2014-06-12 | 2019-10-21 | Eizo Corp | Dispositivo de eliminación de neblina y método de generación de imágenes |
| US9805472B2 (en) * | 2015-02-18 | 2017-10-31 | Sony Corporation | System and method for smoke detection during anatomical surgery |
| US9905000B2 (en) * | 2015-02-19 | 2018-02-27 | Sony Corporation | Method and system for surgical tool localization during anatomical surgery |
| WO2017084094A1 (zh) * | 2015-11-20 | 2017-05-26 | 富士通株式会社 | 烟雾检测装置、方法以及图像处理设备 |
| CN107101235B (zh) * | 2017-05-25 | 2019-03-08 | 珠海格力电器股份有限公司 | 一种油烟机控制方法、装置及油烟机 |
| CN108319964B (zh) * | 2018-02-07 | 2021-10-22 | 嘉兴学院 | 一种基于混合特征和流形学习的火灾图像识别方法 |
| CN108564091A (zh) * | 2018-03-08 | 2018-09-21 | 佛山市云米电器科技有限公司 | 目标区域弱边缘提取方法及油烟浓度检测与干扰排除方法 |
| CN108592134A (zh) * | 2018-08-15 | 2018-09-28 | 胡惠娟 | 一种吸油烟机控制方法及控制系统 |
-
2018
- 2018-09-29 CN CN201811152666.3A patent/CN109028234B/zh active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107726399A (zh) * | 2017-11-07 | 2018-02-23 | 佛山市云米电器科技有限公司 | 油烟收集系统、方法及装置 |
| CN108548199A (zh) * | 2018-03-08 | 2018-09-18 | 佛山市云米电器科技有限公司 | 一种智能抽油烟机风速调级方法及装置 |
| CN108550159A (zh) * | 2018-03-08 | 2018-09-18 | 佛山市云米电器科技有限公司 | 一种基于图像三色分割的烟气浓度标识方法 |
| CN108563991A (zh) * | 2018-03-08 | 2018-09-21 | 佛山市云米电器科技有限公司 | 厨房油烟浓度划分方法及油烟浓度检测与干扰排除方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN109028234A (zh) | 2018-12-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106548467B (zh) | 红外图像和可见光图像融合的方法及装置 | |
| CN109028233B (zh) | 厨房油烟浓度划分方法及油烟图像识别系统及油烟机 | |
| US5969753A (en) | Method and system for detecting errors in a sample image | |
| CN112149543B (zh) | 一种基于计算机视觉的建筑扬尘识别系统与方法 | |
| CN108550159B (zh) | 一种基于图像三色分割的烟气浓度标识方法 | |
| CN110570422B (zh) | 一种基于矩阵分析的胶囊缺陷视觉检测方法 | |
| CN112365467B (zh) | 一种基于单幅图像深度估计的雾天图像能见度估计方法 | |
| CN110751635B (zh) | 一种基于帧间差分和hsv颜色空间的口腔检测方法 | |
| CN117409010B (zh) | 漆面缺陷检测模型训练、检测、编码方法及检测系统 | |
| CN111582076A (zh) | 一种基于像素运动智能感知的画面冻结检测方法 | |
| CN114333047A (zh) | 一种基于双光感知信息融合的人体摔倒检测装置与方法 | |
| CN111985435B (zh) | 一种基于机器视觉的无人机水域监测巡航方法 | |
| CN109028234B (zh) | 一种能够对烟雾等级进行标识的油烟机 | |
| CN116721039B (zh) | 一种应用于自动化光学缺陷检测中的图像预处理方法 | |
| CN112927459A (zh) | 一种基于无人机视觉的九宫格火势预测方法及应用 | |
| CN116630332B (zh) | 一种基于图像处理的pvc塑料管口缺陷检测方法 | |
| CN109028236A (zh) | 一种自动识别油烟状况的抽油烟机 | |
| CN109461165A (zh) | 基于图像三色分割的厨房油烟浓度划分标识方法 | |
| CN109389075A (zh) | 智能烟机镜头模糊自检方法 | |
| Xiang et al. | A new model for daytime visibility index estimation fused average sobel gradient and dark channel ratio | |
| CN109345483A (zh) | 基于图像三色分割的厨房油烟浓度标识方法 | |
| CN104992418B (zh) | 一种适用于热像视频彩色化的异常色校正方法 | |
| CN109373375B (zh) | 智能烟机精度镜头模糊自检方法 | |
| CN109060831B (zh) | 一种基于底板拟合的自动脏污检测方法 | |
| CN113628131A (zh) | 雾天场景下变电站指针式油位表的智能识别方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |