CN108876712B - Spherical closed cabin panoramic display method based on double projection transformation - Google Patents
Spherical closed cabin panoramic display method based on double projection transformation Download PDFInfo
- Publication number
- CN108876712B CN108876712B CN201810641964.2A CN201810641964A CN108876712B CN 108876712 B CN108876712 B CN 108876712B CN 201810641964 A CN201810641964 A CN 201810641964A CN 108876712 B CN108876712 B CN 108876712B
- Authority
- CN
- China
- Prior art keywords
- spherical
- image
- projection transformation
- display
- images
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T3/00—Geometric image transformations in the plane of the image
- G06T3/40—Scaling of whole images or parts thereof, e.g. expanding or contracting
- G06T3/4038—Image mosaicing, e.g. composing plane images from plane sub-images
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T3/00—Geometric image transformations in the plane of the image
- G06T3/08—Projecting images onto non-planar surfaces, e.g. geodetic screens
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/60—Analysis of geometric attributes
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/90—Determination of colour characteristics
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/55—Optical parts specially adapted for electronic image sensors; Mounting thereof
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
- H04N7/181—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast for receiving images from a plurality of remote sources
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2200/00—Indexing scheme for image data processing or generation, in general
- G06T2200/32—Indexing scheme for image data processing or generation, in general involving image mosaicing
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Geometry (AREA)
- Stereoscopic And Panoramic Photography (AREA)
- Image Processing (AREA)
- Studio Devices (AREA)
Abstract
本发明公开一种基于双投影变换的球形封闭式座舱全景显示方法,包括S01、图像采集:采集得到至少M组图像;S02、全景拼接:包括柱面投影变换和球面贴合投影变换;S03、球形显示,包括:球面分割:得到N份等大的多边形图像;分块存储:将所述多边形图像分块存储于缓冲区;链式寻址:在每块多边形图像内部对像素按照链式顺序进行寻址,重新编码;链式扫描:按照链式顺序扫描驱动物理屏幕;分块显示:读取缓冲区所述多边形图像的存储内容,显示在本区域对应的物理屏幕上。本方法提出了一种新的适用于任意异形屏幕的寻址扫描方式,适用于任意拼接式球形显示器,适用于封闭环境下的球形全景显示场合,对于各种封闭驾驶舱或模拟训练舱可带来更出色的沉浸式体验。

The invention discloses a method for panoramic display of spherical enclosed cockpit based on double projection transformation. , spherical display, including: spherical segmentation: obtaining N equal-sized polygon images; block storage: storing the polygon images in the buffer in blocks; chain addressing: in each polygon image, the pixels are chained according to the chain. Sequence addressing and recoding; chain scan: scan and drive the physical screen in a chain sequence; block display: read the storage content of the polygon image in the buffer, and display it on the physical screen corresponding to this area. This method proposes a new addressing scanning method suitable for any special-shaped screen, suitable for any splicing spherical display, suitable for spherical panoramic display occasions in a closed environment, and can be used for various closed cockpits or simulated training cabins. for a better immersive experience.
Description
技术领域technical field
本发明属于全景显示技术领域,尤其涉及一种基于双投影变换的球形封闭座舱全景显示方法。The invention belongs to the technical field of panoramic display, and in particular relates to a method for panoramic display of a spherical closed cockpit based on double projection transformation.
背景技术Background technique
目前,传统的座舱显示系统多采用多单元显示方法,即多组屏幕拼接形成大屏显示效果。此方法需要多屏显卡处理原始图像,将分割后的图像分屏输出到多路显示器中显示。这种方法显示区域只能为观看者前视区域,很难通过拼接的方式产生360度的全景显示,不能在封闭环境下带来优越的沉浸式体验。At present, the traditional cockpit display system mostly adopts the multi-unit display method, that is, multiple sets of screens are spliced together to form a large-screen display effect. This method requires a multi-screen graphics card to process the original image, and output the split image to a multi-channel display for display. The display area of this method can only be the front-view area of the viewer, and it is difficult to generate a 360-degree panoramic display by splicing, and it cannot bring a superior immersive experience in a closed environment.
基于虚拟现实的全景显示系统是现有方案中较为火热的全景显示方法,但使用者必须佩戴VR眼镜,十分不便,且该方法也存在显示视角狭小的问题。如果显示存在延迟极易对使用者带来眩晕感的不良体验。The panoramic display system based on virtual reality is a relatively popular panoramic display method in the existing solutions, but the user must wear VR glasses, which is very inconvenient, and the method also has the problem of a narrow display viewing angle. If there is a delay in the display, it is easy to bring a bad experience of dizziness to the user.
其他较为成熟的全景显示技术为投影式全景显示,如CAVE沉浸式投影显示系统。这是一种大型的VR显示系统,具有较好的沉浸感和良好的交互手段,但其显示原理较为复杂,需要高端的图形处理系统与之配合,往往造价昂贵,无法广泛推广,不适用于封闭式座舱显示。投影式显示在环绕式圆柱形或圆顶屏幕这种大型的应用场合上体验效果更好,可以提供更广的视场范围和更优越的沉浸体验。但在座舱显示系统中,由于空间较为狭小,投影显示方式很容易因为人员走动产生遮挡,影响观看效果。Other more mature panoramic display technologies are projection panoramic displays, such as the CAVE immersive projection display system. This is a large-scale VR display system with good immersion and good interactive means, but its display principle is complex and requires a high-end graphics processing system to cooperate with it, which is often expensive, cannot be widely promoted, and is not suitable for Enclosed cockpit display. Projection displays have better experience in large-scale applications such as wrap-around cylindrical or dome screens, which can provide a wider field of view and a better immersive experience. However, in the cockpit display system, due to the narrow space, the projection display method is easily blocked by the movement of people, which affects the viewing effect.
发明内容SUMMARY OF THE INVENTION
本发明所要解决的技术问题是:The technical problem to be solved by the present invention is:
为了解决现有封闭座舱全景显示系统实施困难,沉浸式体验不强等技术不足,本发明提供一种基于双投影变换的球形封闭座舱全景显示方法。In order to solve the technical deficiencies of the existing closed cockpit panoramic display system such as difficult implementation and weak immersive experience, the present invention provides a spherical closed cockpit panoramic display method based on double projection transformation.
本发明为解决上述技术问题采用以下技术方案:The present invention adopts the following technical solutions for solving the above-mentioned technical problems:
本发明提出一种基于双投影变换的球形封闭座舱全景显示方法,步骤包括:The present invention provides a method for displaying panorama of spherical enclosed cockpit based on double projection transformation, and the steps include:
S01、图像采集:采集得到至少M组图像;S01, image acquisition: acquire at least M groups of images;
S02、全景拼接:所述M组图像经过投影变换,得到完整的球形全景图像;所述投影变换包括柱面投影变换和球面贴合投影变换;S02, panoramic stitching: the M groups of images are subjected to projection transformation to obtain a complete spherical panoramic image; the projection transformation includes cylindrical projection transformation and spherical fitting projection transformation;
S03、球形显示,具体依次包括:S03, spherical display, specifically including:
球面分割:对所述球形全景图像进行分割,得到N份等大的多边形图像;Spherical segmentation: segment the spherical panoramic image to obtain N equal-sized polygon images;
分块存储:将所述多边形图像分块存储于缓冲区;Block storage: store the polygon image in the buffer in blocks;
链式寻址:在每块多边形图像内部对像素按照链式顺序进行寻址,重新编码;Chain addressing: address the pixels in a chain sequence within each polygon image and re-encode;
链式扫描:按照链式顺序扫描驱动物理屏幕;Chain Scan: Scan and drive the physical screen in a chain sequence;
分块显示:读取缓冲区所述多边形图像的存储内容,显示在本区域对应的物理屏幕上。Block display: read the storage content of the polygon image in the buffer, and display it on the physical screen corresponding to this area.
如前所述的一种基于双投影变换的球形封闭座舱全景显示方法,进一步地,S01.图像采集所述的M组图像,分别由M台摄像机采集,所述摄像机互成β夹角平均分布在圆周结构上。A kind of spherical closed cockpit panorama display method based on bi-projection transformation as mentioned above, further, S01. Image collection said M groups of images are collected by M cameras respectively, and the cameras form an average β angle with each other distributed on a circular structure.
如前所述的一种基于双投影变换的球形封闭座舱全景显示方法,进一步地,S01.图像采集中,除了用于投影到柱面上的M组图像,还包括顶面图像和底面图像,所述图像分别由上拍摄像机和下拍摄像机采集。A method for panoramic display of spherical enclosed cockpit based on double projection transformation as mentioned above, further, S01. In the image acquisition, in addition to the M groups of images used to project on the cylinder, it also includes a top image and a bottom image , the images are collected by the up-shooting camera and the down-shooting camera respectively.
如前所述的一种基于双投影变换的球形封闭座舱全景显示方法,进一步地,S01图像采集所述的M组图像由三轴云台搭载普通镜头摄像机等时隙拍摄而成。As mentioned above, a spherical closed cockpit panorama display method based on double projection transformation, further, the M groups of images in S01 image acquisition are captured by a three-axis pan/tilt head equipped with a common lens camera and other time slots.
如前所述的一种基于双投影变换的球形封闭座舱全景显示方法,进一步地,,S02全景拼接所述的柱面投影变换具体包括:将M组图像投影到圆柱侧面上,再在图像与图像的边缘进行线性融合,得到柱面环景图像。As mentioned above, a spherical closed cockpit panorama display method based on double projection transformation, further, the cylindrical projection transformation described in S02 panorama splicing specifically includes: projecting the M groups of images on the side of the cylinder, and then adding the image Linear fusion is performed with the edge of the image to obtain a cylindrical surround image.
如前所述的一种基于双投影变换的球形封闭座舱全景显示方法,进一步地,所述圆柱的截面半径为摄像头焦距加镜头至圆心距离。As mentioned above, a spherical closed cockpit panorama display method based on double projection transformation, further, the cross-sectional radius of the cylinder is the focal length of the camera plus the distance from the lens to the center of the circle.
如前所述的一种基于双投影变换的球形封闭座舱全景显示方法,进一步地,S02.全景拼接所述的球面贴合投影变换具体包括:以球面为承影面,将柱面和圆柱上下底面投影至与所述柱面相切的球面上,得到球面全景图像。A kind of spherical enclosed cockpit panorama display method based on double projection transformation as mentioned above, further, S02. The spherical fitting projection transformation described in panorama stitching specifically includes: taking the spherical surface as the shadow-bearing surface, and placing the cylindrical surface and the cylindrical surface up and down The bottom surface is projected onto the spherical surface tangent to the cylindrical surface to obtain a spherical panoramic image.
如前所述的一种基于双投影变换的球形封闭座舱全景显示方法,进一步地,所述球面贴合投影变换过程在球面的低纬地区采用等角正轴圆柱反投影变换,高纬地区采用球面投影变换。As mentioned above, a spherical closed cockpit panoramic display method based on double projection transformation, further, the spherical fitting projection transformation process adopts the equiangular positive axis cylindrical back projection transformation in the low latitude area of the spherical surface, and adopts the high latitude area. Spherical projection transformation.
如前所述的一种基于双投影变换的球形封闭座舱全景显示方法,进一步地,S03球形显示中,球面分割部分所述多边形图像包括三角形,平行四边形,正五边形。As described above, a spherical closed cabin panoramic display method based on double projection transformation, further, in S03 spherical display, the polygonal image of the spherical segmented part includes triangles, parallelograms, and regular pentagons.
如前所述的一种基于双投影变换的球形封闭座舱全景显示方法,进一步地,S03.球形显示中,像素之间按照链式顺序寻址,每个像素的地址由低位到高位进行编码。As mentioned above, a spherical closed cockpit panorama display method based on double projection transformation, further, S03. In spherical display, the pixels are addressed in a chain sequence, and the address of each pixel is encoded from the low order to the high order.
如前所述的一种基于双投影变换的球形封闭座舱全景显示方法,进一步地,所述链式顺序包括:下一地址指向同行相邻的像素;如果当前识别的像素地址到达一行的边界,则下一地址指向下一行同侧边界的像素。As mentioned above, a spherical closed cockpit panorama display method based on double projection transformation, further, the chain sequence includes: the next address points to a pixel adjacent to a row; if the currently identified pixel address reaches the boundary of a row, Then the next address points to the pixel on the same side boundary of the next row.
如前所述的一种基于双投影变换的球形封闭座舱全景显示方法,进一步地,S03球形显示中,所述的内球面显示系统包括相机组,图像处理器,地址转换器,信号控制器,一组屏幕驱动和一组多边形屏幕,其中:A spherical closed cockpit panoramic display method based on double projection transformation as mentioned above, further, in S03 spherical display, the inner spherical display system includes a camera group, an image processor, an address converter, and a signal controller, A set of screen drivers and a set of polygon screens, where:
相机组输出多路图像至图像处理器;The camera group outputs multiple images to the image processor;
图像处理器输出图像信息至地址转换器,输出像素数据信号至屏幕驱动;The image processor outputs the image information to the address converter, and outputs the pixel data signal to the screen driver;
地址转换器,用于转换图像地址格式,同时输出地址数据信号至屏幕驱动;The address converter is used to convert the image address format and output the address data signal to the screen driver at the same time;
信号控制器输出屏幕同步信号至图像处理器、地址转换器和屏幕驱动;The signal controller outputs the screen synchronization signal to the image processor, the address converter and the screen driver;
亮度颜色均衡器输出亮度颜色校准信号至屏幕驱动,同时从一组多边形屏幕接收亮度颜色信息作为反馈;The luminance-color equalizer outputs luminance-color calibration signals to the screen driver, and receives luminance-color information as feedback from a group of polygonal screens;
一组屏幕驱动,用于驱动所述多边形屏幕;a set of screen drivers for driving the polygon screen;
一组多边形屏幕,用于拼接成类球形显示器,显示全景图像。A set of polygonal screens that are stitched together into a spherical-like display that displays panoramic images.
如前所述的一种基于双投影变换的球形封闭座舱全景显示方法,进一步地,所述多边形屏幕的形状包括三角形,平行四边形和正五边形。As mentioned above, a spherical closed cabin panoramic display method based on double projection transformation, further, the shape of the polygonal screen includes triangle, parallelogram and regular pentagon.
本发明采用以上技术方案与现有技术相比,具有以下技术效果:Compared with the prior art, the present invention adopts the above technical scheme, and has the following technical effects:
1.本发明采用双投影变换实现球面投影,根据纬度采用不同的投影算法,大大减小了图像在投影过程中的失真程度;本发明将类球形图像分割为多边形图像进行存储,将顺序过程变成并行过程,便于存储和读取,提高了加载速度;本发明按照链式顺序对像素进行寻址,可适应任意多边形屏幕;;本发明采用链式扫描,一方面减少传统行列扫描方式中的行同步信号,只用像素信号和场同步信号控制屏幕刷新图像;另一方面可适应任意多边形屏幕驱动,实现任意多边形拼接式球形显示。1. The present invention adopts double projection transformation to realize spherical projection, and adopts different projection algorithms according to the latitude, which greatly reduces the degree of distortion of the image in the projection process; the present invention divides the spherical image into polygonal images for storage, and changes the sequential process into It is a parallel process, which is convenient for storage and reading, and improves the loading speed; the present invention addresses the pixels according to the chain sequence, and can adapt to any polygonal screen; Line synchronization signal, only use pixel signal and field synchronization signal to control the screen to refresh the image; on the other hand, it can adapt to arbitrary polygon screen drive, and realize arbitrary polygon splicing spherical display.
2.与传统多组屏幕拼接形成大屏的方案相比,本发明可实现大曲率等视距的内球面显示;与基于VR设备的虚拟现实显示技术相比,本发明不需要使用者佩戴设备的同时能提供360°宽广的视野,而且所有多边形屏幕同时加载显示,解决了延迟所致的眩晕问题。2. Compared with the traditional scheme of splicing multiple sets of screens to form a large screen, the present invention can realize the inner spherical display with large curvature and equal viewing distance; compared with the virtual reality display technology based on VR equipment, the present invention does not require users to wear equipment At the same time, it can provide a 360° wide field of view, and all polygonal screens are loaded and displayed at the same time, which solves the problem of vertigo caused by delay.
3.本发明提供用于拼接方式的全景显示系统的图像采集、图像变换、图像显示全套方法。克服现有设备的缺点,提供全新的通用性全景显示方法。3. The present invention provides a complete set of methods for image acquisition, image transformation, and image display for a splicing-style panoramic display system. Overcome the shortcomings of the existing equipment and provide a new universal panoramic display method.
附图说明Description of drawings
图1是总流程图。Figure 1 is an overall flow chart.
图2是M=3时多路摄像机组结构示意图。FIG. 2 is a schematic diagram of the structure of a multi-channel camera group when M=3.
图3是转动式摄像机三轴云台结构示意图。FIG. 3 is a schematic diagram of the structure of a three-axis pan/tilt of a rotating camera.
图4是柱面投影变换算法平面图像到柱面图像映射关系俯视图。FIG. 4 is a top view of the mapping relationship from a plane image to a cylindrical image by a cylindrical projection transformation algorithm.
图5是柱面投影变换算法平面图像到柱面图像映射关系3D示意图。FIG. 5 is a 3D schematic diagram of a mapping relationship between a plane image and a cylindrical image by a cylindrical projection transformation algorithm.
图6是球面贴合投影变换算法柱面图像到球面图像映射关系3D示意图。FIG. 6 is a 3D schematic diagram of the mapping relationship between a cylindrical image and a spherical image by the spherical fitting projection transformation algorithm.
图7是球面贴合投影变换算法高纬区映射关系3D示意图。FIG. 7 is a 3D schematic diagram of the mapping relationship in the high latitude region of the spherical fit projection transformation algorithm.
图8是球面五边形屏幕以及三角形屏幕链式扫描方式示意图。FIG. 8 is a schematic diagram of a spherical pentagonal screen and a chain scanning mode of a triangular screen.
图9是内球面显示系统模块关系示意图。FIG. 9 is a schematic diagram of the relationship between the modules of the inner spherical display system.
具体实施方式Detailed ways
下面结合附图对本发明的技术方案做进一步的详细说明:Below in conjunction with accompanying drawing, the technical scheme of the present invention is described in further detail:
本技术领域技术人员可以理解的是,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。It will be understood by those skilled in the art that, unless otherwise defined, all terms (including technical and scientific terms) used herein have the same meaning as commonly understood by one of ordinary skill in the art to which this invention belongs. It should also be understood that terms such as those defined in general dictionaries should be understood to have meanings consistent with their meanings in the context of the prior art and, unless defined as herein, are not to be taken in an idealized or overly formal sense. explain.
本发明提供的方法适用于多种硬件方案,这里示例性给出其中两种硬件解决方案作为实施例,但并不限于此硬件方案范围。图1示出本方法的图像采集部分包含多路摄像机组采集和转动式摄像头采集两种方法,可根据需要选择其中任意一种图像采集方法。The method provided by the present invention is applicable to a variety of hardware solutions, and two of the hardware solutions are exemplarily given here as examples, but are not limited to the scope of the hardware solutions. Figure 1 shows that the image acquisition part of the method includes two methods: multi-channel camera group acquisition and rotary camera acquisition, and any one of the image acquisition methods can be selected according to needs.
实施例一、使用多路摄像机组进行图像采集
图2是M=3时多路摄像机组结构示意图。本实施例中,将M组(M≥3)视角为α的摄像机,互成β夹角平均分布在圆周上,视角α须大于夹角β。如果有需要,在所述圆周的圆心上下分别增加上拍摄像机和下拍摄像机。其中,当3≤M≤6时,分布在圆周上的摄像机采用广角镜头;此时,拍摄出的图像需经过桶形畸变矫正,以校正广角镜头造成拍摄画面的透视失真;当M>6时,采用常规镜头。(r:镜头至圆心距离;f:摄像头焦距;R=r+f:上述圆周的半径)FIG. 2 is a schematic diagram of the structure of a multi-channel camera group when M=3. In this embodiment, M groups (M≧3) of cameras with a viewing angle α are evenly distributed on the circumference forming an included angle β, and the viewing angle α must be greater than the included angle β. If necessary, an up-shooting camera and a down-shooting camera are respectively added up and down the center of the circle. Among them, when 3≤M≤6, the cameras distributed on the circumference use wide-angle lenses; at this time, the captured images need to undergo barrel distortion correction to correct the perspective distortion of the captured images caused by the wide-angle lens; when M>6, use regular lens. (r: the distance from the lens to the center of the circle; f: the focal length of the camera; R=r+f: the radius of the above circle)
镜头至圆心距离r,摄像头焦距f,上述圆周的半径R,摄像机视角α,夹角β与摄像机组数M之间的关系为:The relationship between the distance r from the lens to the center of the circle, the focal length of the camera f, the radius R of the above circle, the camera angle of view α, the included angle β and the number of camera groups M is:
本实施例中M=3,即包括三个在圆周互成120度角安装的广角摄像机;本实施例还包括两个在圆心上下镜像安装的普通摄像机作为上拍摄像机和下拍摄像机。图2示例性的示出M=3时的结构示意图。In this embodiment, M=3, that is, it includes three wide-angle cameras installed at a 120-degree angle on the circumference; this embodiment also includes two ordinary cameras mirrored above and below the center of the circle as up-cameras and down-cameras. FIG. 2 exemplarily shows a schematic structural diagram when M=3.
此时可一次采集到M张图像和A(上)、B(下)两张底面图像;多次采集,得到M组图像和A(上)、B(下)两组底面图像。其中M组图像先经过柱面投影变换,投影到横截面半径为R的圆柱侧面上(所述圆柱横截面的半径R等于摄像头焦距f加镜头至圆心距离r)。然后,对柱面图像运用球面贴合投影变换算法,完成将柱面图像投影到球面的过程。At this time, M images and two bottom images of A (top) and B (bottom) can be collected at one time; after multiple acquisitions, M images and two bottom images of A (top) and B (bottom) can be obtained. The M group images are first transformed by cylindrical projection and projected onto the side of a cylinder with a cross-sectional radius R (the radius R of the cylindrical cross-section is equal to the focal length f of the camera plus the distance r from the lens to the center of the circle). Then, the spherical fitting projection transformation algorithm is applied to the cylindrical image to complete the process of projecting the cylindrical image to the spherical surface.
(一)柱面投影变换算法(1) Cylindrical projection transformation algorithm
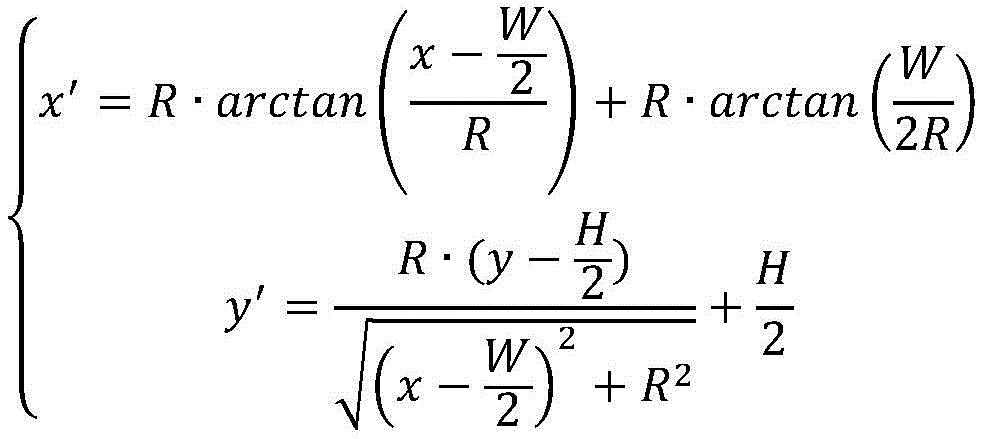
图4和图5分别是柱面投影变换算法中,平面图像到柱面图像映射关系的俯视图和3D示意图。首先对M张平面图像进行柱面投影变换。在笛卡尔直角坐标系下,将平面图像(x,y,z)投影到圆柱曲面上,z=-R,圆柱面沿母线可展开为一平面,建立平面直角坐标系,则承影面可表示为(x′,y′)。当M=3时其平面示意图如图4所示,3D示意图如图5所示。相机视域ABB′A′为待投影面,其宽度为W,高度为H,柱面DEE′D′为承影面,柱面半径为R(R=r+f,r:镜头至圆心距离,f:相机焦距),其映射关系如下式表示:FIG. 4 and FIG. 5 are respectively a top view and a 3D schematic diagram of a mapping relationship between a plane image and a cylindrical image in the cylindrical projection transformation algorithm. First, perform cylindrical projection transformation on M plane images. In the Cartesian rectangular coordinate system, the plane image (x, y, z) is projected onto the cylindrical surface, z=-R, the cylindrical surface can be expanded into a plane along the generatrix, and the plane rectangular coordinate system is established, then the shadow-bearing surface can be Denoted as (x', y'). When M=3, the schematic plan view is shown in FIG. 4 , and the 3D schematic diagram is shown in FIG. 5 . The camera's field of view ABB'A' is the surface to be projected, its width is W, its height is H, the cylinder DEE'D' is the shadow-bearing surface, and the cylinder radius is R (R=r+f, r: the distance from the lens to the center of the circle , f: camera focal length), and its mapping relationship is expressed as follows:
柱面投影变换后的M组图像满足视觉一致性原则,在对相邻图像做图像特征提取,将重叠域进行图像配准,最后采用渐入渐出的方式进行图像拼接,这样M组图像经过线性融合,最终可以得到360°柱面环景图像。The M groups of images after cylindrical projection transformation meet the principle of visual consistency. After extracting image features from adjacent images, performing image registration in the overlapping domain, and finally stitching images in a fade-in and fade-out manner, so that M groups of images After the image is linearly fused, a 360° cylindrical surround image can finally be obtained.
(二)球面贴合投影变换算法(2) Spherical Fitting Projection Transformation Algorithm
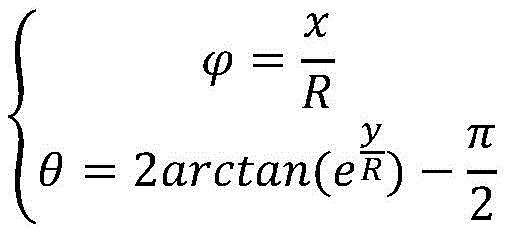
经过柱面变换的图像还只是柱面全景图像,还需经过球面变换才能得到球面全景图像,柱面到球面的贴合采用等角正轴圆柱反投影变换,但此类变换在高纬区域将产生变形失真,且随纬度增加变形程度加大,一般为防止高纬严重失真,纬度需低于60度,即θ>60°。因此将承影球面按纬度换分为A、B、C三个区域,如图6所示。其中南纬θ度到北纬θ度为低纬B区,采用等角正轴圆柱反投影变换;北纬θ度以上为高纬A区,南纬θ度以下为高纬C区,均采用球面投影变换。The image that has undergone cylindrical transformation is only a cylindrical panoramic image, and a spherical panoramic image can only be obtained after spherical transformation. The equiangular positive-axis cylindrical backprojection transformation is used to fit the cylindrical surface to the spherical surface. Deformation distortion occurs, and the degree of deformation increases with the increase of latitude. Generally, in order to prevent serious distortion at high latitudes, the latitude should be lower than 60 degrees, that is, θ>60°. Therefore, the bearing sphere is divided into three regions A, B, and C according to the latitude, as shown in Figure 6. Among them, the south latitude θ degrees to the north latitude θ degrees is the low latitude B area, and the equiangular positive axis cylindrical back projection transformation is used; the north latitude θ degrees above is the high latitude area A, and the south latitude θ degrees is the high latitude area C, both of which use spherical projection. transform.
具体的球面贴合投影变换算法如下所述:The specific spherical fitting projection transformation algorithm is as follows:
首先,在低纬区采用等角正轴圆柱反投影变换:在笛卡尔直角坐标系下,承影面为球面,球面以经纬线表示为(

然后,在高纬区采用球面投影变换:在笛卡尔直角坐标系下,承影面为球面,球面以经纬线表示为(

投影图像与待投影图像之间经过双线性插值,使待投影图像像素可以均匀分布在承影面上。最后由三块投影域拼接成完整球面全景图,三者也必须满足视觉一致原则,即上拍摄像机和下拍摄像机的视角α需满足:Bilinear interpolation is performed between the projected image and the to-be-projected image, so that the pixels of the to-be-projected image can be evenly distributed on the image-bearing surface. Finally, the three projection domains are spliced into a complete spherical panorama, and the three must also meet the principle of visual consistency, that is, the viewing angle α of the upper camera and the lower camera must meet:

其中,H=2hAmong them, H=2h
经过上述步骤,我们得到了球形全景图像。After the above steps, we get a spherical panorama image.
球形全景图像需要按照球形显示器的拼接方式进行对应分割,并重新编址,分片存储。球面图像分割方法包括三角形分割,平行四边形分割,正五边形分割等多边形分割方式,将球面图像分割为N份多边形图像。The spherical panorama image needs to be segmented according to the splicing method of the spherical display, re-addressed, and stored in slices. The spherical image segmentation method includes polygonal segmentation methods such as triangle segmentation, parallelogram segmentation, and regular pentagon segmentation, and the spherical image is divided into N polygonal images.
为方便异形屏幕显示,分割的图像存储前需对像素数据地址按照链式顺序进行重新排序。所述链式顺序指,下一地址指向同行相邻的像素;如果当前识别的像素地址到达一行的边界,则下一地址指向下一行同侧边界的像素。一个像素的地址内部,转换顺序是由低位到高位。最终将二维矩阵编码转化成链式数组编码,示意图如图8所示。In order to facilitate the display of special-shaped screens, the pixel data addresses need to be reordered in a chained order before the divided images are stored. The chain sequence means that the next address points to a pixel adjacent to a row; if the currently identified pixel address reaches the boundary of a row, the next address points to a pixel on the same side boundary of the next row. Within the address of a pixel, the conversion sequence is from low to high. Finally, the two-dimensional matrix encoding is converted into a chained array encoding, as shown in Figure 8.
相应的屏幕拼接方式,可分为三角形拼接,平行四边形拼接,正五边形拼接等多边形拼接方式构成类球形显示器。屏幕刷新显示时从缓冲区读取相应片区图像块,按照链式顺序扫描方式依次点亮像素单元。The corresponding screen splicing methods can be divided into triangle splicing, parallelogram splicing, regular pentagon splicing and other polygon splicing methods to form a spherical display. When the screen is refreshed and displayed, the corresponding image blocks are read from the buffer area, and the pixel units are sequentially lit up according to the chain sequential scanning method.
内球面显示系统的组成如图9所示,包括一个图像处理器,用于对输入全景图进行球面贴合、球面分割、图像存储等处理;一个亮度颜色均衡器,校正各个屏幕之间的颜色和亮度不均匀性,使拼接屏达到整体的亮度与颜色的一致;一个信号控制装置,控制屏幕刷新显示,以及同步多个屏幕的时序;一个地址转换器,将二维矩阵地址编码转换成链式地址编码;一组屏幕驱动,用于驱动异形多边形屏幕的特殊扫描方式;一组多边形屏幕,用于拼接球形显示器,显示全景图像。The composition of the inner spherical display system is shown in Figure 9, including an image processor for spherical fitting, spherical segmentation, image storage and other processing for the input panorama; a brightness and color equalizer to correct the color between each screen and brightness unevenness, so that the overall brightness and color of the splicing screen are consistent; a signal control device controls the screen refresh display and synchronizes the timing of multiple screens; an address converter converts the two-dimensional matrix address code into a chain address coding; a set of screen drivers, which are used to drive special scanning methods for special-shaped polygon screens; a set of polygon screens, which are used for splicing spherical displays to display panoramic images.
实施例二、使用转动式摄像头采集图像
如图3所示,转动式摄像头结构为三轴无刷云台搭载单摄像机,摄像机镜头为普通镜头。其中云台Roll轴和Pitch轴可为相机增稳,防止拍摄画面出现果冻;Yaw轴可以360度转动。Yaw轴每转过β角同时相机拍摄一张图像,转动一圈拍摄M张图像,最后经图像拼接即可生成全景图像。转动多圈后,在M个机位上共留下M组图像,生成多张全景图像。后续的图像拼接、球形显示的具体步骤与实施例一所述的对应内容相同。As shown in Figure 3, the structure of the rotating camera is a three-axis brushless PTZ equipped with a single camera, and the camera lens is an ordinary lens. Among them, the Roll axis and Pitch axis of the gimbal can stabilize the camera to prevent jelly from appearing in the shooting picture; the Yaw axis can be rotated 360 degrees. Each time the Yaw axis rotates through the β angle, the camera captures an image, rotates one circle to capture M images, and finally generates a panoramic image through image stitching. After rotating for many times, a total of M groups of images are left on the M camera positions to generate multiple panoramic images. The specific steps of subsequent image stitching and spherical display are the same as those described in the first embodiment.
以上所述仅是本发明的部分实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。The above are only some embodiments of the present invention. It should be pointed out that for those skilled in the art, without departing from the principles of the present invention, several improvements and modifications can be made. It should be regarded as the protection scope of the present invention.
Claims (8)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201810641964.2A CN108876712B (en) | 2018-06-21 | 2018-06-21 | Spherical closed cabin panoramic display method based on double projection transformation |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201810641964.2A CN108876712B (en) | 2018-06-21 | 2018-06-21 | Spherical closed cabin panoramic display method based on double projection transformation |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN108876712A CN108876712A (en) | 2018-11-23 |
| CN108876712B true CN108876712B (en) | 2022-09-02 |
Family
ID=64340302
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201810641964.2A Active CN108876712B (en) | 2018-06-21 | 2018-06-21 | Spherical closed cabin panoramic display method based on double projection transformation |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN108876712B (en) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110211028B (en) * | 2019-05-09 | 2023-04-07 | 东南大学 | Fisheye image display method based on spherical panoramic display |
| CN114331834B (en) * | 2021-12-08 | 2025-01-03 | 中国人民解放军63861部队 | A panoramic image stitching method in an optical simulation training system |
| CN116958174B (en) * | 2023-08-10 | 2025-10-24 | 卡莱特云科技股份有限公司 | Spherical screen display method, device, electronic device and storage medium |
| CN118488151B (en) * | 2024-07-11 | 2024-11-22 | 广州卓远虚拟现实科技股份有限公司 | Video playback method, device, equipment and storage medium for LED special-shaped screen |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002277958A (en) * | 2001-03-21 | 2002-09-25 | Ricoh Co Ltd | Projector and image forming method |
| WO2017130353A1 (en) * | 2016-01-28 | 2017-08-03 | Necディスプレイソリューションズ株式会社 | Multi-display device and method for controlling multi-display device |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1266582C (en) * | 2001-05-06 | 2006-07-26 | 中兴通讯股份有限公司 | Large-view blocking and buffering display method |
| CN105677283B (en) * | 2016-03-02 | 2018-10-09 | 广东农工商职业技术学院(农业部华南农垦干部培训中心) | A kind of video-signal transmission method and device shown applied to multi-screen splicing |
| CN108122191B (en) * | 2016-11-29 | 2021-07-06 | 成都美若梦景科技有限公司 | Method and device for splicing fisheye images into panoramic image and panoramic video |
-
2018
- 2018-06-21 CN CN201810641964.2A patent/CN108876712B/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002277958A (en) * | 2001-03-21 | 2002-09-25 | Ricoh Co Ltd | Projector and image forming method |
| WO2017130353A1 (en) * | 2016-01-28 | 2017-08-03 | Necディスプレイソリューションズ株式会社 | Multi-display device and method for controlling multi-display device |
Also Published As
| Publication number | Publication date |
|---|---|
| CN108876712A (en) | 2018-11-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7123777B2 (en) | System and method for panoramic imaging | |
| CN108876712B (en) | Spherical closed cabin panoramic display method based on double projection transformation | |
| JP5116416B2 (en) | Panorama video generation apparatus and method | |
| TWI451358B (en) | Banana codec | |
| US20030095338A1 (en) | System and method for panoramic imaging | |
| CN101968890B (en) | 360-degree full-view simulation system based on spherical display | |
| CN107424118A (en) | Based on the spherical panorama mosaic method for improving Lens Distortion Correction | |
| CN107924556B (en) | Image generation device and image display control device | |
| US20030095131A1 (en) | Method and apparatus for processing photographic images | |
| CN101132535A (en) | Multi-projection large-screen splicing method based on turntable | |
| CN103327217B (en) | A kind of method for processing video frequency and device | |
| CN107197135B (en) | Video generation method and video generation device | |
| CN107274341A (en) | Quick binocular flake Panorama Mosaic method based on fixed splicing parameter | |
| JP2020502893A (en) | Oriented image stitching for spherical image content | |
| CN114926612A (en) | Aerial panoramic image processing and immersive display system | |
| WO2022141781A1 (en) | Method and system for playing panoramic video, storage medium, and playback device | |
| CN105809729B (en) | A kind of spherical panorama rendering method of virtual scene | |
| CN110211028B (en) | Fisheye image display method based on spherical panoramic display | |
| CN108765582B (en) | Panoramic picture display method and device | |
| CN105915885A (en) | 3D interaction display method and system of fish-eye image | |
| CN116739885A (en) | Data storage method of panoramic image | |
| CN111145660A (en) | Immersive system based on LED main body | |
| WO2018092992A1 (en) | Real-time panoramic image production system on basis of lookup table and real-time panoramic image production method using same | |
| CN111080523B (en) | Infrared peripheral vision search system and infrared peripheral vision image splicing method based on angle information | |
| CN203078415U (en) | Intelligent vehicle-mounted panoramic imaging system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |