CN101916284A - 3D Model Retrieval Method Based on Multi-resolution Analysis of Shape Orientation - Google Patents
3D Model Retrieval Method Based on Multi-resolution Analysis of Shape Orientation Download PDFInfo
- Publication number
- CN101916284A CN101916284A CN 201010258242 CN201010258242A CN101916284A CN 101916284 A CN101916284 A CN 101916284A CN 201010258242 CN201010258242 CN 201010258242 CN 201010258242 A CN201010258242 A CN 201010258242A CN 101916284 A CN101916284 A CN 101916284A
- Authority
- CN
- China
- Prior art keywords
- sampling
- shape
- function
- resolution
- sample plane
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Landscapes
- Information Retrieval, Db Structures And Fs Structures Therefor (AREA)
Abstract
本发明公开了一种基于形状朝向多分辨率分析的三维模型检索方法,采用三维形状的面片朝向主成分分析方法获取朝向采样平面;采样三维形状的朝向分布,生成朝向分布的采样函数;分析采样函数,提取采样函数的多分辨率低频小波系数;通过自适应多分辨率特征距离计算方法计算特征距离。本发明能够提高三维模型检索的精度和速度,可以应用于三维模型复用、模型识别、机器人视觉、虚拟现实等领域。

The invention discloses a three-dimensional model retrieval method based on multi-resolution analysis of shape orientation. The orientation sampling plane is obtained by using the principal component analysis method of the orientation of the three-dimensional shape patch; the orientation distribution of the three-dimensional shape is sampled to generate a sampling function of the orientation distribution; analysis The sampling function extracts the multi-resolution low-frequency wavelet coefficients of the sampling function; the feature distance is calculated by an adaptive multi-resolution feature distance calculation method. The invention can improve the accuracy and speed of three-dimensional model retrieval, and can be applied to the fields of three-dimensional model reuse, model recognition, robot vision, virtual reality and the like.
Description
技术领域technical field
本发明涉及一种三维模型检索方法。The invention relates to a three-dimensional model retrieval method.
背景技术Background technique
在过去的二十多年来,随着计算机的普及、硬件性能的提升、多媒体录制和拍摄设备的广泛应用,多媒体信息已经在各个领域迅速发展,让整个世界变得非常丰富和多彩。多媒体信息主要包括声音、图像、视频、三维模型。目前互联网上、个人和工业用户硬盘上已经充斥了海量的多媒体信息,造成了信息在各个媒介爆炸增长。如何帮助用户在海量内容中找到所需要的多媒体信息,成为多媒体匹配与检索技术的研究对象。每一件多媒体作品的设计和制作都需要很大努力和很长时间,设计人员可以通过多媒体检索与信息重用获取相似信息,并稍加修改制作新的数据,以此提高工作效率;机器人视觉通过多媒体匹配在机器人存储体中检索物体图像等识别物体;防范、验证、侦破等领域利用多媒体匹配技术来查询指纹库、二维/三维人脸库、三维头颅库等匹配相关信息;工业现场可以根据图像匹配自动判定控制信息、故障类型等;交通领域通过车牌识别等进行自动违章记录、高速路口收费等。然而多媒体内容的匹配与检索没有文本内容匹配与检索那样简单,从一篇文字中提取关键文字信息,和从一幅图像等多媒体中提取能代表该图像的描述信息相比,后者只有具有高级思维的人类才可以完全实现。通过计算机提取多媒体的特征是一件极为复杂的工作,是多媒体匹配与检索的核心技术。In the past two decades, with the popularization of computers, the improvement of hardware performance, and the wide application of multimedia recording and shooting equipment, multimedia information has developed rapidly in various fields, making the whole world very rich and colorful. Multimedia information mainly includes sound, image, video and three-dimensional model. At present, massive amounts of multimedia information have been flooded on the Internet and hard disks of individual and industrial users, resulting in explosive growth of information in various media. How to help users find the multimedia information they need in the mass content has become the research object of multimedia matching and retrieval technology. The design and production of each multimedia work requires a lot of effort and a long time. Designers can obtain similar information through multimedia retrieval and information reuse, and slightly modify and create new data to improve work efficiency; robot vision through Multimedia matching retrieves object images and other identification objects in the robot storage body; uses multimedia matching technology to query matching information such as fingerprint database, 2D/3D face database, and 3D skull database in fields such as prevention, verification, and detection; Image matching automatically determines control information, fault types, etc.; in the traffic field, automatic violation records, highway intersection tolls, etc. are carried out through license plate recognition. However, the matching and retrieval of multimedia content is not as simple as the matching and retrieval of text content. Compared with extracting key text information from a piece of text and extracting description information that can represent the image from multimedia such as an image, the latter only has advanced features. Thinking humans can only be fully realized. Extracting the features of multimedia by computer is an extremely complex task, and it is the core technology of multimedia matching and retrieval.
三维数字模型是一种比二维图像内容更为丰富真实、更加符合人类视觉特性、更能清楚地表达一个现实三维物体的多媒体数据类型,它的基础数据是三维数字形状,由形状来实现三维数字模型。近些年来,新型的三维形状获取设备不断更新、三维形状建模研究的进展和MAYA、3DMAX、Pro/E、CATIA等三维建模工具的大力推广使得三维形状的设计变得越来越简单,三维模型已经在多媒体领域、虚拟现实、工业设计和制造CAD/CAM、MRI医学三维图像、生物分子与基因结构、游戏、动画角色、人机交互等方面广泛应用。这些广泛应用使得每天有数以兆计的三维模型产生,同时在互联网技术作用下使迅速传播,存在着对三维模型进行匹配与检索的迫切需求。而且,三维模型匹配与检索技术可以应用在三维模型重用中,由于三维模型需要大量的建模工作,它可以帮助设计人员迅速找到相似模型并在现有模型基础上构造新的模型,节约建模时间。另外,还可以应用在多媒体信息检索、CAD模型匹配、机器人三维视觉、生物分子与医学器官模型匹配、机械模型设计支援、三维对象识别与验证、虚拟现实场景物体匹配、动画与游戏角色设计支援、月球与深空对象探测、故障诊断等领域。对基于内容的三维形状匹配与检索技术进行研究已变得非常重要。A 3D digital model is a multimedia data type that is richer and more realistic than a 2D image, more in line with human visual characteristics, and more clearly expressing a real 3D object. digital model. In recent years, the continuous update of new 3D shape acquisition equipment, the progress of 3D shape modeling research and the vigorous promotion of 3D modeling tools such as MAYA, 3DMAX, Pro/E, and CATIA have made the design of 3D shapes easier and easier. 3D models have been widely used in multimedia fields, virtual reality, industrial design and manufacturing CAD/CAM, MRI medical 3D images, biomolecular and genetic structures, games, animated characters, human-computer interaction, etc. These wide applications have resulted in the generation of trillions of 3D models every day, and at the same time, they have spread rapidly under the influence of Internet technology, and there is an urgent need for matching and retrieval of 3D models. Moreover, 3D model matching and retrieval technology can be applied to 3D model reuse. Since 3D models require a lot of modeling work, it can help designers quickly find similar models and construct new models based on existing models, saving modeling time. In addition, it can also be applied in multimedia information retrieval, CAD model matching, robot 3D vision, biomolecular and medical organ model matching, mechanical model design support, 3D object recognition and verification, virtual reality scene object matching, animation and game character design support, Lunar and deep space object detection, fault diagnosis and other fields. Research on content-based 3D shape matching and retrieval technology has become very important.
目前,实现高效快速的基于内容的三维模型匹配与检索技术已成为国内外多媒体信息识别与检索领域的一个研究热点。国内外公开的文献中,在T.Funkhouser,P.Min,M.Kazhdan,J.Chen,A.Halderman,D.Dobkin,and D.Jacobs,“A search engine for 3Dmodels,”ACM Transactions on Graphics,Vol.22,No.1,pp.83-105,2003.中提出了采用球面调和函数分析了体素化模型,提取了调和系数来描述三维形状的特征;H.Laga,H.Takahashi,and M.Nakajima,“Spherical wavelet descriptors for content-based 3D modelretrieval,”IEEE International Conference on Shape Modeling and Applications,Matsushima,Japan,pp.15-25,Jun.2006.中提出了采用球面小波系数分析了球面延长函数,并采用小波系数来进行描述三维形状的特征;T.Furuya and R.Ohbuchi,“DenseSampling and Fast Encoding for 3D Model Retrieval Using Bag-of-Visual Features,”ACMInternational Conference on Image and Video Retrieval,Santorini,Greece,pp.1-8,Jul.2009.中提出了深度缓存图的特征向量降维方法。At present, realizing efficient and fast content-based 3D model matching and retrieval technology has become a research hotspot in the field of multimedia information recognition and retrieval at home and abroad. In the published literature at home and abroad, in T.Funkhouser, P.Min, M.Kazhdan, J.Chen, A.Halderman, D.Dobkin, and D.Jacobs, "A search engine for 3Dmodels," ACM Transactions on Graphics, Vol.22, No.1, pp.83-105, 2003. Proposed the use of spherical harmonic functions to analyze the voxelization model, and extracted the harmonic coefficients to describe the characteristics of three-dimensional shapes; H.Laga, H.Takahashi, and M.Nakajima, "Spherical wavelet descriptors for content-based 3D model retrieval," IEEE International Conference on Shape Modeling and Applications, Matsushima, Japan, pp.15-25, Jun.2006. Proposed the use of spherical wavelet coefficients to analyze spherical extension function, and use wavelet coefficients to describe the characteristics of three-dimensional shapes; T.Furuya and R.Ohbuchi, "DenseSampling and Fast Encoding for 3D Model Retrieval Using Bag-of-Visual Features," ACMInternational Conference on Image and Video Retrieval, Santorini, Greece, pp.1-8, Jul.2009. proposed a feature vector dimensionality reduction method for depth buffer maps.
但上述文献提出的特征提取方法有几点不足:However, the feature extraction method proposed in the above literature has several shortcomings:
(1)以上方法通过计算距离来提取形状特征。然而,计算形状表面到质心的距离、或者形状表面到包围盒的深度缓存距离,如果质心或者包围盒发生微小变化,可以造成提取的距离函数发生很大变化,方法的稳定性差;(1) The above methods extract shape features by calculating distances. However, when calculating the distance from the shape surface to the centroid, or the depth cache distance from the shape surface to the bounding box, if the centroid or the bounding box changes slightly, the extracted distance function can change greatly, and the stability of the method is poor;
(2)有些方法的形状标准化过程采用了主成分分析PCA或者连续主成分分析CPCA方法,由于基于PCA和CPCA方法计算出来的主轴稳定性不够高,对于后续的特征提取方法造成影响;(2) The shape standardization process of some methods adopts the principal component analysis PCA or continuous principal component analysis CPCA method, because the stability of the main axis calculated based on the PCA and CPCA method is not high enough, which affects the subsequent feature extraction method;
(3)一些方法在特征提取算法的时间复杂度上考虑较少,使得提取特征的时间较长,失去了特征提取精度与特征提取时间的平衡,影响了实时的在线应用。(3) Some methods pay less attention to the time complexity of the feature extraction algorithm, which makes the feature extraction time longer, loses the balance between feature extraction accuracy and feature extraction time, and affects real-time online applications.
发明内容Contents of the invention
为了克服现有技术稳定性差、提取时间较长和特征区分力低的不足,本发明提供一种基于形状朝向多分辨率分析的三维形状特征提取方法,该方法增加了方法的稳定性,保证预处理对后期的特征提取尽量小的影响,提高了特征提取的速度,增强了特征的区分力。In order to overcome the shortcomings of poor stability, long extraction time and low feature discrimination in the prior art, the present invention provides a three-dimensional shape feature extraction method based on shape-oriented multi-resolution analysis, which increases the stability of the method and ensures the prediction The processing has as little impact on the later feature extraction as possible, which improves the speed of feature extraction and enhances the distinguishing power of features.
本发明解决其技术问题所采用的技术方案包括以下步骤:The technical solution adopted by the present invention to solve its technical problems comprises the following steps:
(1)采用三维形状的面片朝向主成分分析方法获取朝向采样平面:采用三维形状的面片朝向主成分分析方法获取三个朝向的主轴,并根据该三个垂直主轴设置六个形状朝向采样平面,该采样平面在空间上构成封闭,将三维形状封闭在内。该步骤需要计算三维形状各面片朝向的法向量和三维形状的平均法向量,由此构成的法向量协方差矩阵,在该矩阵中,对每一个面片的法向量进行面积大小加权,按大小顺序排序矩阵的特征值和相应的三个特征向量,从而根据确定的三个特征向量作为朝向主轴以计算形状朝向的采样平面。采样平面满足两个条件:(a)每个特征向量确定两个采样平面,该特征向量与两个采样平面垂直,而且这两个采样平面应该分别位于三维模型的两侧,不与三维模型相交,三个特征向量共确定出六个采样平面;(b)六个采样平面将三维模型完全包围在内,由于采样平面将采集三维形状的朝向参数,因此采样平面距离三维模型的远近可以任意设定,这与包围盒的概念不同。(1) Use the principal component analysis method of the three-dimensional shape to obtain the orientation sampling plane: use the principal component analysis method of the three-dimensional shape to obtain the three orientation principal axes, and set six shape orientation sampling according to the three vertical axes plane, the sampling plane constitutes a closure in space, enclosing the three-dimensional shape. This step needs to calculate the normal vector of each surface of the three-dimensional shape and the average normal vector of the three-dimensional shape, and thus form the normal vector covariance matrix. In this matrix, the normal vector of each surface is weighted by area size, according to The eigenvalues of the matrix and the corresponding three eigenvectors are sorted in order of magnitude, so that the sampling plane of the shape orientation is calculated according to the determined three eigenvectors as the orientation axis. The sampling plane satisfies two conditions: (a) each eigenvector determines two sampling planes, the eigenvector is perpendicular to the two sampling planes, and the two sampling planes should be located on both sides of the 3D model and do not intersect with the 3D model , the three eigenvectors determine a total of six sampling planes; (b) the six sampling planes completely surround the 3D model, since the sampling planes will collect the orientation parameters of the 3D shape, the distance between the sampling plane and the 3D model can be set arbitrarily Certainly, this is different from the concept of bounding box.
(2)采样三维形状的朝向分布,生成朝向分布的采样函数:通过步骤(1)生成的采样平面按照一定数量级均匀发射采样射线,与三维形状的表面相交,计算采样射线和与之相交的表面法线的内积,将内积值作为形状朝向函数的函数值,采样时采用2的指数倍进行均匀采样,以利于采用快速方法对采样函数进行分析。(2) Sampling the orientation distribution of the three-dimensional shape to generate a sampling function for the orientation distribution: the sampling plane generated by step (1) uniformly emits sampling rays according to a certain order of magnitude, intersects with the surface of the three-dimensional shape, and calculates the sampling rays and the intersecting surface For the inner product of the normal line, the inner product value is used as the function value of the shape orientation function, and the exponential multiple of 2 is used for uniform sampling when sampling, so as to facilitate the analysis of the sampling function by a fast method.
(3)分析采样函数,提取采样函数的多分辨率低频小波系数:选择简单高效的小波母函数,由于朝向函数是区域函数,对于区域运算比较擅长的是Daubechies等母函数,通过该母函数的位移和尺度变换,可以构成一组函数基,利用函数基并根据尺度函数和小波函数对朝向函数按照尺度进行分解,对于二维采样函数采用的是先进行行变换、再进行列变换的方法进行降维,获取多个分辨率下的多组低频小波系数,低频小波系数构成多分辨率的特征。(3) Analyze the sampling function and extract the multi-resolution low-frequency wavelet coefficients of the sampling function: choose a simple and efficient wavelet mother function. Since the orientation function is a regional function, the mother functions such as Daubechies are good at regional operations. Through the mother function Displacement and scale transformation can constitute a group of function bases, and use the function base to decompose the orientation function according to the scale function and wavelet function. For the two-dimensional sampling function, the method of row transformation and then column transformation is used. Dimensionality reduction, obtaining multiple sets of low-frequency wavelet coefficients at multiple resolutions, and the low-frequency wavelet coefficients constitute multi-resolution features.
(4)通过自适应多分辨率特征距离计算方法计算特征距离:利用多采样函数的最小Manhattan距离计算两个三维模型之间某分辨率下的特征距离,同时利用对分辨率加权方法计算所有分辨率下两个三维模型的特征距离。所采用的加权方法为自适应加权,利用样本数据库使检索理论中的First Tier参数最大化,以获取最优的多分辨率特征加权系数。通过这种距离衡量方法使特征距离最大化和最优化。(4) Calculate the feature distance through the adaptive multi-resolution feature distance calculation method: use the minimum Manhattan distance of the multi-sampling function to calculate the feature distance at a certain resolution between two 3D models, and use the resolution weighting method to calculate all resolutions Rate the characteristic distance of two 3D models. The weighting method adopted is adaptive weighting, using the sample database to maximize the First Tier parameter in the retrieval theory to obtain the optimal multi-resolution feature weighting coefficient. The feature distance is maximized and optimized by this distance measure.
本发明的有益效果是:本发明考虑了三维形状的朝向,而放弃了提取距离特征的传统方式,从而增加了方法的稳定性。针对三维形状特征提取前的预处理阶段进行了认真考虑和论证,发现基于主成分分析PCA和连续主成分分析CPCA的预处理方法对后续的特征提取有一定的影响,因此本发明提出了一种基于形状朝向主成分分析方法来获取形状采样平面,由于形状朝向的主成分相对稳定,与普通主成分分析PCA或者连续主成分分析CPCA的预处理过程相比,对后期特征提取影响较小。在获取原始特征时,本发明提出了形状朝向作为最原始的分析对象,与之前的基于距离原始特征的方法相比,在加强特征提取的鲁棒性的同时,可以在形状朝向很少的采样率下获取大量的特征。它采用了多分辨率小波分析方法对形状朝向函数进行了快速分析,提高了低频特征提取的速度,有利于将方法推向实时在线的应用场合。本发明提出了自适应多分辨率特征距离计算方法,以保证不同分辨率有着不同距离衡量方式,以保证特征距离的最大化和最优化,提高了特征区分力。The beneficial effect of the present invention is that: the present invention considers the orientation of the three-dimensional shape, and abandons the traditional method of extracting distance features, thereby increasing the stability of the method. Careful consideration and demonstration have been carried out on the preprocessing stage before the three-dimensional shape feature extraction, and it is found that the preprocessing method based on principal component analysis PCA and continuous principal component analysis CPCA has a certain influence on the subsequent feature extraction, so the present invention proposes a The shape sampling plane is obtained based on the shape-oriented principal component analysis method. Since the principal component of the shape orientation is relatively stable, compared with the preprocessing process of ordinary PCA or continuous principal component analysis CPCA, it has less impact on the later feature extraction. When acquiring the original features, the present invention proposes the shape orientation as the most original analysis object. Compared with the previous method based on distance original features, while enhancing the robustness of feature extraction, the shape orientation can be sampled with few Get a large number of features at a low rate. It adopts the multi-resolution wavelet analysis method to quickly analyze the shape orientation function, which improves the speed of low-frequency feature extraction and is conducive to pushing the method to real-time online applications. The present invention proposes an adaptive multi-resolution feature distance calculation method to ensure that different resolutions have different distance measurement methods, to ensure the maximization and optimization of feature distances, and to improve feature discrimination.
下面结合附图和实施实例对本发明进一步说明。The present invention will be further described below in conjunction with the accompanying drawings and implementation examples.
附图说明Description of drawings
图1为本发明所述三维模型检索的系统流程图;Fig. 1 is the system flowchart of three-dimensional model retrieval described in the present invention;
图2为本发明的三维模型特征提取的流程图;Fig. 2 is the flowchart of three-dimensional model feature extraction of the present invention;
图3为本发明的形状朝向采样方法的说明图;3 is an explanatory diagram of the shape orientation sampling method of the present invention;
图4为本发明的形状朝向采样方法的加速方法说明图;Fig. 4 is an explanatory diagram of the acceleration method of the shape orientation sampling method of the present invention;
图5为本发明的朝向采样函数的多分辨率系数获取的说明图。FIG. 5 is an explanatory diagram of multi-resolution coefficient acquisition towards a sampling function of the present invention.
具体实施方式Detailed ways
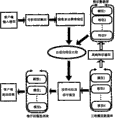
如图1所示详细的解释了三维模型检索的系统流程图。本发明的该项技术可以实现三维模型网络搜索的系统功能。通过用户在查询接口输入一个三维模型,计划搜索该模型的所有相似模型,检索系统将该模型的检索请求通过网络传送给搜索引擎,搜索引擎做出响应,将检索到符合条件的三维模型传送给用户,并按照相似度高低对三维模型进行排序。具体流程是,在系统接收到客户端用户发送到的三维模型的检索请求,首先经过特征提取算法获取三维模型的特征向量,该特征向量可以唯一的表达一个三维模型而且具有高度辨别力,可以区分出和其他三维模型的区别。特征提取算法分析形状朝向,获取多分辨率特征。系统采用自适应特征比较方法来逐一计算该特征向量与特征数据库的距离,获取与特征数据库相对应的三维模型数据库中的三维模型。三维模型数据库通过离线特征提取计算数据库中每一个模型的特征,并将这些特征存放在特征数据库。因此,特征数据库与三维模型数据库有着一一对应的关系,这项特征提取工作是离线进行的,不占用在线运行的时间。检索系统根据特征比较的结果生成相似度的排序,从而根据相似度由大到小来排序三维模型,排在最前面的代表最相似的三维模型,排序方法可以采用快速排序等成熟的方法。检索系统将排序的模型列表通过网络响应返回给客户端用户,该列表由二维缩略图组成,每一个缩略图都对应着相应的一个三维模型,同时将返回算法的检索时间,用户可以浏览到相似三维模型的二维缩略图,当点击二维缩略图后可以看到三维模型的三维视图,三维视图均可以通过鼠标滑动来观察三维模型的详细立体内容。The system flowchart of 3D model retrieval is explained in detail as shown in Fig. 1. The technology of the present invention can realize the system function of three-dimensional model network search. The user inputs a 3D model in the query interface and plans to search for all similar models of the model. The retrieval system sends the retrieval request of the model to the search engine through the network, and the search engine responds by sending the retrieved 3D models that meet the requirements to users, and sort the 3D models according to the degree of similarity. The specific process is that when the system receives the retrieval request of the 3D model sent by the client user, it first obtains the feature vector of the 3D model through a feature extraction algorithm. The feature vector can uniquely express a 3D model and has a high degree of discrimination, which can It is different from other 3D models. Feature extraction algorithms analyze shape orientation to obtain multi-resolution features. The system uses an adaptive feature comparison method to calculate the distance between the feature vector and the feature database one by one, and obtains the 3D model in the 3D model database corresponding to the feature database. The 3D model database calculates the features of each model in the database through offline feature extraction, and stores these features in the feature database. Therefore, there is a one-to-one correspondence between the feature database and the 3D model database. This feature extraction work is performed offline and does not take up the time of online operation. The retrieval system generates a similarity ranking based on the results of feature comparison, so that the 3D models are sorted from large to small according to the similarity. The top of the list represents the most similar 3D models. The sorting method can use mature methods such as quick sorting. The retrieval system will return the sorted model list to the client user through the network response. The list is composed of two-dimensional thumbnails, and each thumbnail corresponds to a corresponding three-dimensional model. At the same time, the retrieval time of the algorithm will be returned, and the user can browse to Similar to the 2D thumbnail of the 3D model, when you click the 2D thumbnail, you can see the 3D view of the 3D model, and the 3D view can be used to observe the detailed three-dimensional content of the 3D model by sliding the mouse.
如图2所示为本发明的三维模型特征提取的过程。先对三维模型进行面片朝向主成分分析,计算模型的面片法向量的三个垂直的主轴,获取与主轴垂直的六个相应的朝向采样平面。按照某一个分辨率均匀分割每一个朝向采样平面,从每一个朝向采样平面发射朝向采样射线,并生成朝向采样函数,并对该函数进行多分辨率分析获取多分辨率小波系数,最终作为朝向的多分辨率特征。需要注意的是该特征并不是单一特征,而是包含着多个不同分辨率的特征。As shown in Fig. 2, the process of feature extraction of the three-dimensional model of the present invention is shown. Firstly, the facet orientation principal component analysis is performed on the 3D model, the three perpendicular principal axes of the facet normal vector of the model are calculated, and six corresponding orientation sampling planes perpendicular to the principal axes are obtained. According to a certain resolution, each facing sampling plane is evenly divided, and the facing sampling ray is emitted from each facing sampling plane, and the heading sampling function is generated, and the multi-resolution analysis is performed on the function to obtain the multi-resolution wavelet coefficient, which is finally used as the heading Multiresolution features. It should be noted that this feature is not a single feature, but contains multiple features with different resolutions.
结合附图,具体实施步骤以下做详细说明。In conjunction with the accompanying drawings, the specific implementation steps are described in detail below.
一、采用三维形状的面片朝向主成分分析方法获取朝向采样平面。1. Obtain the orientation sampling plane by using the facet orientation principal component analysis method of the three-dimensional shape.
该步骤采用三维形状的面片朝向主成分分析方法获取三个朝向的主轴,并根据该三个垂直主轴设置六个形状朝向采样平面,该采样平面在空间上构成封闭,将三维形状封闭在内。该步骤需要计算三维形状各面片朝向的法向量和三维形状的平均法向量,由此构成的法向量协方差矩阵,在该矩阵中,对每一个面片的法向量进行面积大小加权,按大小顺序排序矩阵的特征值和相应的三个特征向量,从而根据确定的三个特征向量作为朝向主轴以计算形状朝向的采样平面。计算如下:In this step, the principal component analysis method of the three-dimensional shape is used to obtain three oriented principal axes, and six shape-oriented sampling planes are set according to the three vertical principal axes. The sampling plane forms a closed space and encloses the three-dimensional shape. . This step needs to calculate the normal vector of each surface of the three-dimensional shape and the average normal vector of the three-dimensional shape, and thus form the normal vector covariance matrix. In this matrix, the normal vector of each surface is weighted by area size, according to The eigenvalues of the matrix and the corresponding three eigenvectors are sorted in order of magnitude, so that the sampling plane of the shape orientation is calculated according to the determined three eigenvectors as the orientation axis. Calculated as follows:
假设任意一个三维形状,共有N个面片,任取一个面片Ti,面片面积为fi,代表面片朝向的法向量为ni,该法向量经过标准化处理,由法向量构成的协方差矩阵C为:Assuming any three-dimensional shape, there are N patches in total. Take any patch T i , the surface area is f i , and the normal vector representing the orientation of the patch is n i . The covariance matrix C is:
其中f为三维形状的表面总面积,表达式为:where f is the total surface area of the three-dimensional shape, expressed as:
其中n0是所有面片朝向的平均法向量。where n 0 is the average normal vector of all patch orientations.
将形状朝向的协方差矩阵进行特征运算,公式如下:Perform feature operations on the covariance matrix of the shape orientation, the formula is as follows:
Cei=λiei Ce i = λ i e i
求取特征值如下:Find the eigenvalues as follows:
{λ1,λ2,λ3}{λ 1 ,λ 2 ,λ 3 }
和对应的特征向量如下:And the corresponding eigenvectors are as follows:
{e1,e2,e3}{e 1 , e 2 , e 3 }
并根据特征值从大到小的顺序,排列特征向量。And arrange the eigenvectors according to the order of the eigenvalues from large to small.
根据确定的三个特征向量计算形状朝向的采样平面,该采样平面满足两个条件:According to the determined three eigenvectors, the sampling plane of the shape orientation is calculated, and the sampling plane satisfies two conditions:
(a)每个特征向量确定两个采样平面,该特征向量与两个采样平面垂直,而且这两个采样平面应该分别位于三维模型的两侧,不与三维模型相交,三个特征向量共确定出六个采样平面;(a) Each eigenvector determines two sampling planes, the eigenvector is perpendicular to the two sampling planes, and these two sampling planes should be located on both sides of the 3D model, not intersecting the 3D model, and the three eigenvectors are determined together Out of six sampling planes;
(b)六个采样平面将三维模型完全包围在内,由于采样平面将采集三维形状的朝向参数,因此采样平面相距三维模型的远近可以任意设定,这与包围盒的概念不同。(b) The six sampling planes completely surround the 3D model. Since the sampling planes will collect the orientation parameters of the 3D shape, the distance between the sampling planes and the 3D model can be set arbitrarily, which is different from the concept of a bounding box.
二、采样三维形状的朝向分布,生成朝向分布的采样函数。2. Sampling the orientation distribution of the three-dimensional shape and generating a sampling function of the orientation distribution.
通过步骤(1)生成的采样平面按照一定数量级均匀发射采样射线,与三维形状的表面相交,计算采样射线和与之相交的表面法线的内积,将内积值作为形状朝向函数的函数值,采样时采用2的指数倍进行均匀采样,以利于采用快速方法对采样函数进行分析。The sampling plane generated by step (1) uniformly emits sampling rays according to a certain order of magnitude, intersects with the surface of the three-dimensional shape, calculates the inner product of the sampling ray and the intersecting surface normal, and uses the inner product value as the function value of the shape orientation function , the exponential multiple of 2 is used for uniform sampling in order to facilitate the analysis of the sampling function with a fast method.
获取朝向分布的目的是:朝向分布是三维形状面片集的重要特征,人类可以根据任意一个三维形状的朝向将其区分,朝向具有三维形状特征的代表性。朝向特征具有不随采样距离远近而变化的特点,这与采样距离函数相比具有鲁棒性,例如如果一个三维形状发生轻微变化,那么立体包围盒就要发生变化,随之采集的深度缓存的距离就会变化,然而采样朝向不受远近距离的影响。The purpose of obtaining the orientation distribution is: the orientation distribution is an important feature of the three-dimensional shape patch set, and humans can distinguish any three-dimensional shape according to the orientation, and the orientation has the representativeness of the three-dimensional shape feature. The orientation feature has the characteristic that it does not change with the sampling distance, which is more robust than the sampling distance function. For example, if a three-dimensional shape changes slightly, the three-dimensional bounding box will change, and the distance of the acquired depth buffer will change, but the sampling orientation is not affected by the distance.
如图3,具体方法如下:As shown in Figure 3, the specific method is as follows:
(1)将每一个采样平面分割为N×N的小正方体,那么采样分辨率为N,为了进行快速运算和分析方便,N应该为2的任意指数倍,例如N=64,并且分割要均匀;(1) Divide each sampling plane into N×N small cubes, then the sampling resolution is N. For fast calculation and analysis convenience, N should be any exponential multiple of 2, such as N=64, and the division should be uniform ;
(2)从每一个小正方体的中心O发射一条射线V,与三维形状的第一个面片相交;(2) emit a ray V from the center O of each small cube, intersecting with the first facet of the three-dimensional shape;
(3)获取第一个面片的法向量L,并与射线法向量V求向量内积(L,-V),这里负号存在的原因是将射线方向取反,可以使用右手定则将L旋转至-V。(3) Obtain the normal vector L of the first surface, and calculate the vector inner product (L, -V) with the ray normal vector V. The reason for the negative sign here is to reverse the direction of the ray. You can use the right-hand rule to L rotates to -V.
(4)将向量内积(L,-V)值作为采样值赋予该小正方体中心,所有小正方体均做采样运算。在赋值之前两个向量必须预先标准化。(4) The vector inner product (L, -V) value is assigned to the center of the small cube as a sampling value, and all small cubes are subjected to sampling operations. Both vectors must be prenormalized before assignment.
(5)这样可以得到一个N×N的二维均匀采样函数f(x,y)。(5) In this way, an N×N two-dimensional uniform sampling function f(x, y) can be obtained.
最终二维采样函数的公式如下:The formula of the final two-dimensional sampling function is as follows:
由于采样平面共有六个,因此,采样函数也有六个相应的函数组成,如下所示:Since there are six sampling planes, the sampling function also consists of six corresponding functions, as follows:
fo(x,y),...,fl(x,y),...,fs(x,y),l ∈[0,5]f o (x, y), ..., f l (x, y), ..., f s (x, y), l ∈ [0, 5]
其中l表示第l个采样平面。where l represents the lth sampling plane.
在实际运算中,该发明设计了一种基于候选法的采样加速方法,图4给出了该方法。图中,任取一个三角形面片i,计算出采样平面内6个正方形组成的包围面,该包围面将该三角形最小包围,确定6条可能与之相交的采样射线,图4中两个实心圆和四个圆环表示6条射线的起点。该方法不再考虑其他采样射线,直接从6个采样点发射的射线中,通过计算判定2个真正与三角形面片相交的两条射线,图中所示的实心圆为两条射线的起点。计算相应2个采样点的采样内积值。这种基于候选法的采样加速方法可以大大节省采样时间。In actual operation, the invention designs a sampling acceleration method based on the candidate method, which is shown in FIG. 4 . In the figure, a triangular patch i is randomly selected, and the enclosing surface composed of 6 squares in the sampling plane is calculated. The enclosing surface encloses the triangle at a minimum, and 6 sampling rays that may intersect with it are determined. In Fig. 4, two solid The circle and four rings represent the origins of the 6 rays. This method no longer considers other sampling rays, and directly from the rays emitted by the six sampling points, two rays that actually intersect the triangle face are determined by calculation. The solid circle shown in the figure is the starting point of the two rays. Calculate the sampling inner product value of the corresponding 2 sampling points. This candidate method-based sampling acceleration method can greatly save sampling time.
三、分析采样函数,提取采样函数的多分辨率低频小波系数。3. Analyze the sampling function and extract the multi-resolution low-frequency wavelet coefficients of the sampling function.
该步骤选择简单高效的小波母函数,由于朝向函数是区域函数,对于区域运算比较擅长的是Daubechies等母函数,通过该母函数的位移和尺度变换,可以构成一组函数基,利用函数基并根据尺度函数和小波函数对朝向函数按照尺度进行分解,对于二维采样函数采用的是,先进行行变换、再进行列变换的方法进行降维,获取多个分辨率下的多组低频小波系数,低频小波系数构成多分辨率的特征。In this step, a simple and efficient wavelet mother function is selected. Since the orientation function is a regional function, mother functions such as Daubechies are good at regional operations. Through the displacement and scale transformation of this mother function, a set of function bases can be formed. Using the function base and combining According to the scale function and wavelet function, the orientation function is decomposed according to the scale. For the two-dimensional sampling function, the method of row transformation and then column transformation is used to reduce the dimension, and multiple sets of low-frequency wavelet coefficients at multiple resolutions are obtained. , the low-frequency wavelet coefficients constitute multi-resolution features.
本发明在处理采样函数的特点是,通过小波分解的方式获取低分辨率系数,来表征朝向采样函数具有的低频特征。获取低频特征有多种方法,例如傅里叶分析,首先傅里叶分析不能提供多分辨率模式,为下一步骤的自适应多分辨率特征距离计算不能提供支持;另外还有一个重要原因是,对于二维函数,傅里叶分析的计算复杂度是O(n2lgn),然而小波分析的计算复杂度是O(n2),选用傅里叶分析对于整个三维模型特征提取时间上有很大影响。因此本发明采用小波分解方式获取多分辨率低频特征。The feature of the present invention in processing the sampling function is that low-resolution coefficients are obtained by means of wavelet decomposition to characterize the low-frequency characteristics of the sampling function. There are many ways to obtain low-frequency features, such as Fourier analysis. First, Fourier analysis cannot provide multi-resolution mode, which cannot provide support for the adaptive multi-resolution feature distance calculation in the next step; another important reason is , for two-dimensional functions, the computational complexity of Fourier analysis is O(n 2 lgn), however, the computational complexity of wavelet analysis is O(n 2 ), choosing Fourier analysis has an advantage in the feature extraction time of the entire 3D model big impact. Therefore, the present invention adopts wavelet decomposition to obtain multi-resolution low-frequency features.
如图5,具体步骤如下:As shown in Figure 5, the specific steps are as follows:
(1)选择简单高效的小波母函数,由于朝向函数是区域函数,对于区域运算比较擅长的是Daubechies等母函数,通过该母函数的位移和尺度变换,可以构成一组函数基;(1) Choose a simple and efficient wavelet mother function. Since the orientation function is a regional function, Daubechies and other mother functions are good at regional operations. Through the displacement and scale transformation of this mother function, a set of function bases can be formed;
(2)根据尺度函数和小波函数对朝向函数按照尺度进行分解,一般对于二维函数采用的是,先进行行变换、再进行列变换的方法进行降维。(2) Decompose the orientation function according to the scale according to the scale function and wavelet function. Generally, for two-dimensional functions, the method of row transformation and then column transformation is used to reduce the dimension.
(3)获取多个分辨率(例如4-5个)下的多组低频小波系数。每组小波系数的维数为2s×2s,这里s表示第s个分辨率。当s=1时收敛成4个点,包含信息量过少,对特征表达有所影响,本发明从s=2开始算起,最低分辨率的维数应为4×4,如果s=5,那么高分辨率的维数应为32×32,依次类推。在实际应用中可以取出5组分辨率下的小波低频系数进行分析。(3) Obtain multiple sets of low-frequency wavelet coefficients at multiple resolutions (for example, 4-5). The dimension of each group of wavelet coefficients is 2 s ×2 s , where s represents the sth resolution. When s=1, it converges to 4 points, which contains too little information, which affects the feature expression. The present invention starts from s=2, and the dimension of the lowest resolution should be 4×4. If s=5 , then the dimension of high resolution should be 32×32, and so on. In practical application, the wavelet low-frequency coefficients under 5 sets of resolutions can be taken out for analysis.
由于存在六个采样平面和对应的六个采样函数,小波分解应该对每一个采样函数进行分别分析。Since there are six sampling planes and corresponding six sampling functions, wavelet decomposition should analyze each sampling function separately.
四、通过自适应多分辨率特征距离计算方法计算特征距离。Fourth, the feature distance is calculated by an adaptive multi-resolution feature distance calculation method.
该步骤利用多采样函数的最小Manhattan距离计算两个三维模型之间某分辨率下的特征距离,同时利用对分辨率加权方法计算所有分辨率下的两个三维模型的特征距离。所采用的加权方法为自适应加权,利用样本数据库使检索理论中的First Tier参数最大化,以获取最优的多分辨率特征加权系数。通过这种距离衡量方法使特征距离最大化和最优化。In this step, the minimum Manhattan distance of the multi-sampling function is used to calculate the feature distance between the two 3D models at a certain resolution, and at the same time, the feature distance of the two 3D models at all resolutions is calculated using a resolution weighting method. The weighting method adopted is adaptive weighting, using the sample database to maximize the First Tier parameter in the retrieval theory to obtain the optimal multi-resolution feature weighting coefficient. The feature distance is maximized and optimized by this distance measure.
该发明中设计了一种主要针对多分辨率特征的自适应特征距离计算方法,该方法根据不同分辨率下的特征具有不同的区分力,通过自适应加权的方式来提高具有高度区分力的某分辨率特征所占比重,从而提高整个多分辨率特征的距离区分度。In this invention, an adaptive feature distance calculation method is designed mainly for multi-resolution features. This method has different discrimination power according to the features at different resolutions, and improves a certain distance with high discrimination power through adaptive weighting. The proportion of resolution features, thereby improving the distance discrimination of the entire multi-resolution feature.
具体计算如下:The specific calculation is as follows:
(1)采用多采样函数的最小Manhattan距离计算两个三维模型之间的某分辨率下的特征距离。(1) The minimum Manhattan distance of the multi-sampling function is used to calculate the feature distance between two 3D models at a certain resolution.
设在任意一个分辨率k之下,采用多采样函数的最小Manhattan距离计算在该分辨率下两个三维模型之间的距离dk。其中l表示第l个采样平面函数,在这里共计采用六个采样平面,可以包围成一个封闭的立方体。在具体实施时,也可以采用12个或者24个采样平面组成一个封闭的十二面体或者二十四面体,目的是可以采样所有的形状朝向而不遗漏。在分辨率k下两个三维模型之间的距离为:Assuming that at any resolution k, the minimum Manhattan distance of the multi-sampling function is used to calculate the distance d k between two 3D models at this resolution. Among them, l represents the lth sampling plane function, here a total of six sampling planes are used, which can be surrounded by a closed cube. In a specific implementation, 12 or 24 sampling planes can also be used to form a closed dodecahedron or icosahedron, in order to sample all shape orientations without omission. The distance between two 3D models at resolution k is:
dk=min{dk,l},l∈[0,5]d k = min{d k, l }, l ∈ [0, 5]
dk从所有采样平面函数之间的距离中取最近距离。两个三维模型在分辨率k下任意一个采样平面函数l的距离可以依据如下特征距离计算公式: dk takes the closest distance from the distances between all sampled plane functions. The distance between any sampling plane function l of two 3D models at resolution k can be calculated according to the following characteristic distance formula:
dkl=||V1,k,l-V2,k,l||d kl =||V 1, k, l -V 2, k, l ||
其中V1,k,l表示第一个三维模型在分辨率k下第l个采样平面的小波低频系数,V2,k,l表示第二个三维模型在分辨率k下第l个采样平面的小波低频系数。小波低频系数可以与人的视觉相近,因此在相似距离量度上采用Manhattan距离。Among them, V 1, k, l represent the wavelet low-frequency coefficients of the lth sampling plane of the first 3D model at resolution k , and V2, k, l represent the lth sampling plane of the second 3D model at resolution k The wavelet low-frequency coefficients of . Wavelet low-frequency coefficients can be similar to human vision, so the Manhattan distance is used as the similarity distance measure.
(2)采用对分辨率加权方法计算两个三维模型的特征距离。(2) Calculate the characteristic distance of two 3D models by weighting the resolution.
由于不同分辨率下的小波低频系数具有不同的特征区分能力,如何衡量在某一分辨率下的特征区分能力,本发明设计了两种距离计算方法,第一种方法是固定加权方法,对不同分辨率下不同特征采用固定系数wk加权;第二种方法是自适应加权方法,根据查询内容和分类自动计算加权系数wk。第一种方法的缺陷是不会针对所有类的检索得出最优的结果。在本发明中采用第二种自适应加权方法对不同分辨率下的小波系数特征进行自适应加权。加权方法计算的距离公式如下:Since the wavelet low-frequency coefficients at different resolutions have different feature discrimination capabilities, how to measure the feature discrimination capabilities at a certain resolution, the present invention designs two distance calculation methods, the first method is a fixed weighting method, for different Different features under the resolution are weighted with a fixed coefficient w k ; the second method is an adaptive weighting method, which automatically calculates the weight coefficient w k according to the query content and classification. The disadvantage of the first method is that it does not yield optimal results for all classes of retrieval. In the present invention, the second adaptive weighting method is adopted to perform adaptive weighting on the wavelet coefficient features at different resolutions. The distance formula calculated by the weighting method is as follows:
(3)采用自适应加权的手段,利用样本数据库使检索理论中的First Tier参数最大化。(3) Using the method of self-adaptive weighting, using the sample database to maximize the First Tier parameter in the retrieval theory.
下面给出First Tier计算方法。假设在三维模型的样本数据库D中存在一个三维模型mi,该三维模型归属于类Cj,模型数据库大小即维数为N,类Cj的大小即维数为R,三维模型mi归属于类Cj,即The calculation method of First Tier is given below. Assuming that there is a 3D model mi in the sample database D of 3D models, the 3D model belongs to class C j , the size of the model database is N, the size of class C j is R, and the 3D model mi belongs to For class C j , ie
mi∈Cj m i ∈ C j
在该数据库中查询该模型,并将不包括该对象本身的查询结果按照距离从小到大进行排序,即最相似的模型排在最前面。现在只关心排序在前R-1的模型列表,R为该归属类的维数,R减去1的目的是不统计该对象本身。假设在前R-1的模型列表中有P个模型属于同一类别Cj,相对于该模型mi来说,The model is queried in the database, and the query results excluding the object itself are sorted in descending order of distance, that is, the most similar model is ranked first. Now we only care about the model list sorted in the first R-1, R is the dimension of the belonging class, and the purpose of subtracting 1 from R is not to count the object itself. Assuming that there are P models belonging to the same category C j in the model list of the previous R-1, relative to the model mi ,
FTi=P/(R-1)FT i =P/(R-1)
其中FTi表示该模型mi的First Tier参数值。理想的First Tier值应该为1.0,表现为输入检索对象时,前R-1个(不包括输入对象本身)全部属于同一类别,说明该特征距离具有最完全的区分能力。在小于1.0的情况下,First Tier值越大越好,说明距离区分能力越强。Where FT i represents the First Tier parameter value of the model mi . The ideal First Tier value should be 1.0, which means that when the retrieval object is input, the first R-1 (excluding the input object itself) all belong to the same category, indicating that the feature distance has the most complete discrimination ability. In the case of less than 1.0, the larger the First Tier value, the better, indicating that the distance discrimination ability is stronger.
通过上述方法统计所有模型的First Tier,并针对样本数据库维数N求出平均值。平均First Tier为,The First Tier of all models is counted by the above method, and the average value is calculated for the dimension N of the sample database. The average First Tier is,
公式中的First Tier参数为在某一个分辨率下的计算结果。The First Tier parameter in the formula is the calculation result at a certain resolution.
然后计算所有分辨率k下的First Tier值,赋给wk作为权重,从而为分辨率k下的距离加权。表达如下:Then calculate the First Tier value at all resolution k, and assign w k as the weight, thus weighting the distance at resolution k. The expression is as follows:
wk=FTk w k =FT k
这种自适应多分辨率特征距离计算方法最终计算的结果可以表达为:The final calculation result of this adaptive multi-resolution feature distance calculation method can be expressed as:
采用这种自适应加权方法来确定最优的特征距离分布。之后在实际在线检索时,通过计算输入模型与三维模型数据库之间的这种特征距离,可以排序相似的三维数据模型。This adaptive weighting method is used to determine the optimal feature distance distribution. Then, during actual online retrieval, by calculating this characteristic distance between the input model and the 3D model database, similar 3D data models can be sorted.
Claims (6)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2010102582422A CN101916284B (en) | 2010-08-19 | 2010-08-19 | Three-dimensional model searching method based on shape orientation multi-resolution analysis |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2010102582422A CN101916284B (en) | 2010-08-19 | 2010-08-19 | Three-dimensional model searching method based on shape orientation multi-resolution analysis |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN101916284A true CN101916284A (en) | 2010-12-15 |
| CN101916284B CN101916284B (en) | 2012-05-16 |
Family
ID=43323796
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2010102582422A Expired - Fee Related CN101916284B (en) | 2010-08-19 | 2010-08-19 | Three-dimensional model searching method based on shape orientation multi-resolution analysis |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN101916284B (en) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102063475A (en) * | 2010-12-22 | 2011-05-18 | 张丛喆 | Webpage user terminal presenting method of three-dimensional model |
| CN105320764A (en) * | 2015-10-26 | 2016-02-10 | 天津大学 | 3D model retrieval method and 3D model retrieval apparatus based on slow increment features |
| CN108549908A (en) * | 2018-04-13 | 2018-09-18 | 浙江科技学院 | Chemical process fault detection method based on more sampled probability core principle component models |
| CN110059213A (en) * | 2019-03-20 | 2019-07-26 | 杭州电子科技大学 | A kind of threedimensional model classification retrieving method based on Density Estimator |
| CN110555219A (en) * | 2018-05-31 | 2019-12-10 | 首都航天机械公司 | Three-dimensional CAD model similarity retrieval system and method based on image recognition |
| CN110737788A (en) * | 2019-10-16 | 2020-01-31 | 哈尔滨理工大学 | A Fast 3D Model Index Establishment and Retrieval Method |
| CN110930488A (en) * | 2019-11-15 | 2020-03-27 | 深圳市瑞立视多媒体科技有限公司 | Fish behavior simulation method, device, equipment and storage medium |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20080084413A1 (en) * | 2006-10-10 | 2008-04-10 | Samsung Electronics Co.; Ltd | Method for generating multi-resolution three-dimensional model |
| CN101196930A (en) * | 2008-01-04 | 2008-06-11 | 覃征 | Three-dimensional model searching system |
| CN101281545A (en) * | 2008-05-30 | 2008-10-08 | 清华大学 | A 3D Model Retrieval Method Based on Multi-Feature Correlation Feedback |
-
2010
- 2010-08-19 CN CN2010102582422A patent/CN101916284B/en not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20080084413A1 (en) * | 2006-10-10 | 2008-04-10 | Samsung Electronics Co.; Ltd | Method for generating multi-resolution three-dimensional model |
| CN101196930A (en) * | 2008-01-04 | 2008-06-11 | 覃征 | Three-dimensional model searching system |
| CN101281545A (en) * | 2008-05-30 | 2008-10-08 | 清华大学 | A 3D Model Retrieval Method Based on Multi-Feature Correlation Feedback |
Non-Patent Citations (2)
| Title |
|---|
| 《Journal of Information Processing》 20081231 ZHENBAO LIU等 A New 3D Shape Retrieval Method Using Spherical Healpix 190-200页 1-6 第16卷, 2 * |
| 《武汉大学学报(理学版)》 20090831 盛洁谞,陈琪 多层多分辨率的扩展高斯图像 486-490页 1-6 第55卷, 第4期 2 * |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102063475A (en) * | 2010-12-22 | 2011-05-18 | 张丛喆 | Webpage user terminal presenting method of three-dimensional model |
| CN102063475B (en) * | 2010-12-22 | 2012-10-10 | 张丛喆 | Webpage user terminal presenting method of three-dimensional model |
| CN105320764A (en) * | 2015-10-26 | 2016-02-10 | 天津大学 | 3D model retrieval method and 3D model retrieval apparatus based on slow increment features |
| CN105320764B (en) * | 2015-10-26 | 2019-05-07 | 天津大学 | A 3D model retrieval method and retrieval device based on incremental slow feature |
| CN108549908A (en) * | 2018-04-13 | 2018-09-18 | 浙江科技学院 | Chemical process fault detection method based on more sampled probability core principle component models |
| CN110555219A (en) * | 2018-05-31 | 2019-12-10 | 首都航天机械公司 | Three-dimensional CAD model similarity retrieval system and method based on image recognition |
| CN110555219B (en) * | 2018-05-31 | 2022-12-27 | 首都航天机械公司 | Three-dimensional CAD model similarity retrieval system and method based on image recognition |
| CN110059213A (en) * | 2019-03-20 | 2019-07-26 | 杭州电子科技大学 | A kind of threedimensional model classification retrieving method based on Density Estimator |
| CN110737788A (en) * | 2019-10-16 | 2020-01-31 | 哈尔滨理工大学 | A Fast 3D Model Index Establishment and Retrieval Method |
| CN110737788B (en) * | 2019-10-16 | 2022-05-31 | 哈尔滨理工大学 | Rapid three-dimensional model index establishing and retrieving method |
| CN110930488A (en) * | 2019-11-15 | 2020-03-27 | 深圳市瑞立视多媒体科技有限公司 | Fish behavior simulation method, device, equipment and storage medium |
Also Published As
| Publication number | Publication date |
|---|---|
| CN101916284B (en) | 2012-05-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111382300B (en) | Multi-view three-dimensional model retrieval method and system based on pairing depth feature learning | |
| CN107122396B (en) | Method for searching three-dimension model based on depth convolutional neural networks | |
| CN101916284B (en) | Three-dimensional model searching method based on shape orientation multi-resolution analysis | |
| CN102298649B (en) | Space trajectory retrieval method of body movement data | |
| CN113569979A (en) | Three-dimensional object point cloud classification method based on attention mechanism | |
| CN105868706A (en) | Method for identifying 3D model based on sparse coding | |
| CN102254338B (en) | Automatic obtaining method of three-dimensional scene optimal view angle based on maximized visual information | |
| CN114973418B (en) | Behavior recognition method of cross-mode three-dimensional point cloud sequence space-time characteristic network | |
| CN102024036A (en) | Three-dimensional object retrieval method and device based on hypergraphs | |
| CN113032613A (en) | Three-dimensional model retrieval method based on interactive attention convolution neural network | |
| CN105205135A (en) | 3D (three-dimensional) model retrieving method based on topic model and retrieving device thereof | |
| CN106599053A (en) | Three-dimensional model retrieval method | |
| CN106844620B (en) | View-based feature matching three-dimensional model retrieval method | |
| CN114782992B (en) | A super joint and multimodal network and its application in behavior recognition method | |
| CN102567465B (en) | Method for searching geometrical similarity of three-dimensional models on basis of compound eye vision | |
| Ning et al. | 3D CAD model dynamic clustering based on inertial feature encoder | |
| CN106778639A (en) | A kind of exercise data search method based on the description of attitude relative space-time characteristic statisticses | |
| CN103514276A (en) | Graphic target retrieval positioning method based on center estimation | |
| Nie et al. | Multi-scale CNNs for 3D model retrieval | |
| CN109857886B (en) | A 3D Model Retrieval Method Based on Minimax Game Theory View Approximation | |
| CN105868324B (en) | A Multi-View Target Retrieval Method Based on Hidden State Model | |
| CN103336781B (en) | A medical image clustering method | |
| CN101894267A (en) | A Method for Selecting Feature Views of 3D Objects | |
| Luo et al. | Real time 3D hand gesture recognition by weighted depth difference motion history image in networked HCI | |
| CN107067426B (en) | A kind of image texture characteristic extracting method based on nested three-legged structure |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| ASS | Succession or assignment of patent right |
Owner name: NANTONG JINNIU MACHINERY MANUFACTURE CO., LTD. Free format text: FORMER OWNER: NORTHWESTERN POLYTECHNICAL UNIVERSITY Effective date: 20141014 Owner name: NORTHWESTERN POLYTECHNICAL UNIVERSITY Effective date: 20141014 |
|
| C41 | Transfer of patent application or patent right or utility model | ||
| COR | Change of bibliographic data |
Free format text: CORRECT: ADDRESS; FROM: 710072 XI'AN, SHAANXI PROVINCE TO: 226600 NANTONG, JIANGSU PROVINCE |
|
| TR01 | Transfer of patent right |
Effective date of registration: 20141014 Address after: 226600, Jiangsu province Nantong city Haian county old dam Town Industrial Park Patentee after: NANTONG JINNIU MACHINERY MANUFACTURE CO., LTD. Patentee after: Northwestern Polytechnical University Address before: 710072 Xi'an friendship West Road, Shaanxi, No. 127 Patentee before: Northwestern Polytechnical University |
|
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20120516 Termination date: 20190819 |
|
| CF01 | Termination of patent right due to non-payment of annual fee |