CN101276415A - Device and method for realizing multi-resolution image acquisition with multiple fixed-focus cameras - Google Patents
Device and method for realizing multi-resolution image acquisition with multiple fixed-focus cameras Download PDFInfo
- Publication number
- CN101276415A CN101276415A CNA200810101241XA CN200810101241A CN101276415A CN 101276415 A CN101276415 A CN 101276415A CN A200810101241X A CNA200810101241X A CN A200810101241XA CN 200810101241 A CN200810101241 A CN 200810101241A CN 101276415 A CN101276415 A CN 101276415A
- Authority
- CN
- China
- Prior art keywords
- camera
- image
- scene
- cameras
- video cameras
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Landscapes
- Studio Devices (AREA)
Abstract
一种采用多定焦摄像机实现多分辨率图像采集的装置及方法,包括5台具有位置约束关系的定焦摄像机,其中4台摄像机处于同一水平面上,位于同一个正方形的4个顶点上,且4台摄像机的焦距相同,设为fs;另外1台摄像机位于上述4台摄像机的一方,该一台摄像机的轴心线垂直于4台摄像机面且经过正方形的中心点O,且该第5台摄像机到其余4台摄像机所在平面的距离为d,设该摄像机的焦距为ft,对5台定焦摄像机的参数和位置作初始化设置,其位置关系满足如下约束:ft=fs+d。本发明实现了多定焦摄像机无损变焦拍摄的功能,场景图像细节可调整,灵活可控,在较大可视场景中快速采集多分辨率图像。
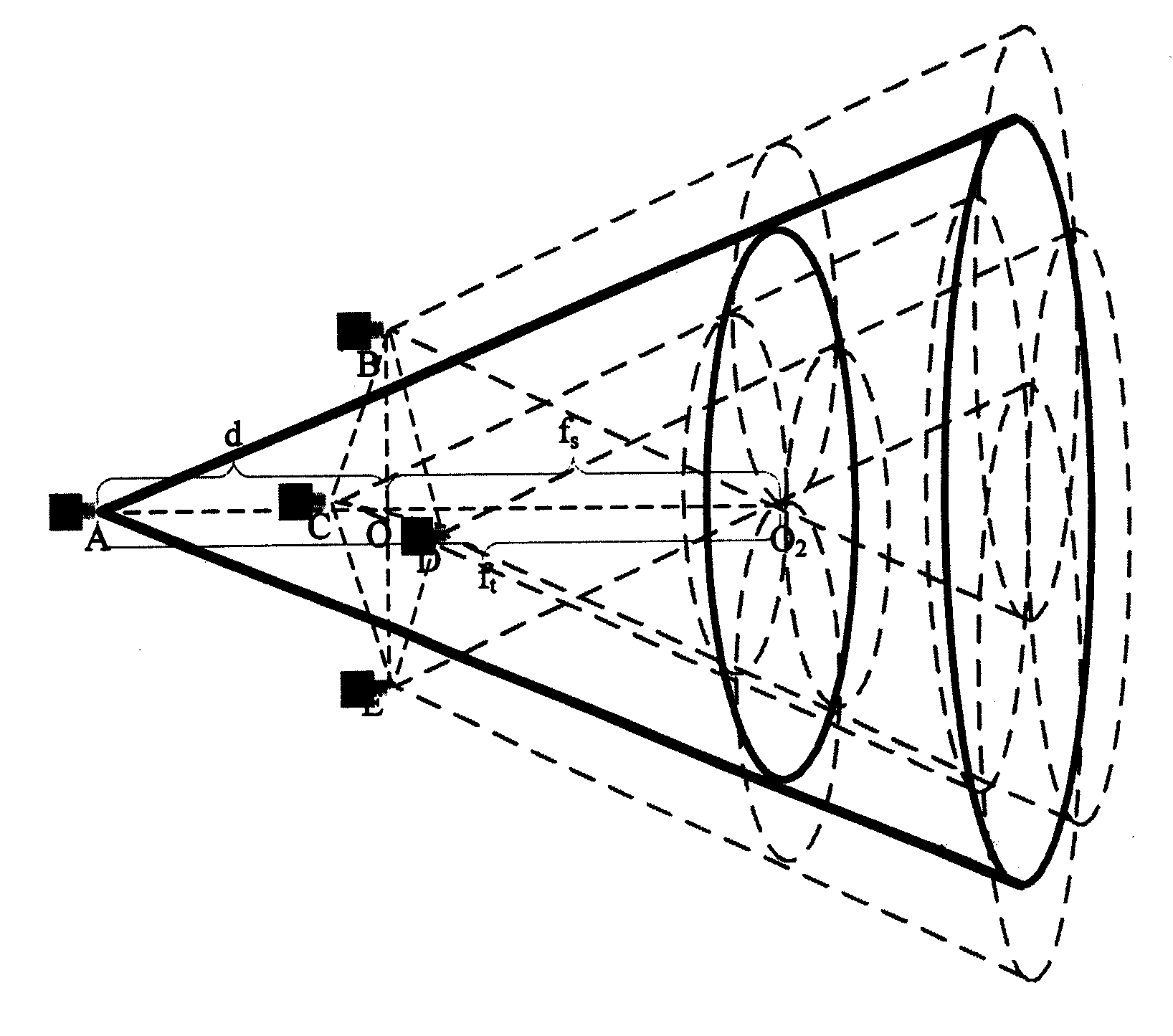
A device and method for realizing multi-resolution image acquisition by using multiple fixed-focus cameras, including five fixed-focus cameras with position constraints, wherein four cameras are on the same horizontal plane, and are located on four vertices of the same square, and The focal lengths of the 4 cameras are the same, set as f s ; the other camera is located on one side of the above 4 cameras, the axis of the camera is perpendicular to the plane of the 4 cameras and passes through the center point O of the square, and the 5th camera The distance between one camera and the plane where the other four cameras are located is d, and the focal length of the camera is set as f t , and the parameters and positions of the five fixed-focus cameras are initialized, and their positional relationship satisfies the following constraints: f t = f s + d. The invention realizes the function of non-destructive zoom shooting of multiple fixed-focus cameras, the details of scene images can be adjusted, it is flexible and controllable, and multi-resolution images can be quickly collected in larger visible scenes.
Description
技术领域technical field
本发明属于视频处理领域,具体地说是一种应用于计算机视觉的场景图像获取的装置和方法。The invention belongs to the field of video processing, in particular to a device and method for acquiring scene images applied to computer vision.
背景技术Background technique
多分辨率图像采集是指在不同的分辨率细节上对同一场景的图像数据进行一致的采集的过程。强调的是根据用户对图像细节的需求,人为的调节拍摄场景图像分辨率。已有的方法和装置是使用变焦摄像机实现多分辨率图像采集。Multi-resolution image acquisition refers to the process of consistent acquisition of image data of the same scene at different resolution details. The emphasis is on artificially adjusting the image resolution of the shooting scene according to the user's needs for image details. Existing methods and devices use zoom cameras to achieve multi-resolution image acquisition.
变焦摄像机是指摄像机的镜头焦距可以调节改变,这样可以通过改变镜头焦距来获得不同的视觉和拍摄效果的摄像机,包括单摄像机光学变焦拍摄、单摄像机数字变焦拍摄。A zoom camera refers to a camera whose lens focal length can be adjusted and changed, so that different visual and shooting effects can be obtained by changing the lens focal length, including single-camera optical zoom shooting and single-camera digital zoom shooting.
单摄像机光学变焦是依靠光学镜头结构来实现变焦,通过摄像头的镜片移动来放大与缩小需要拍摄的景物,光学变焦倍数越大,能拍摄的景物就越远。一般的光学变焦摄像机价格昂贵,且在变焦后,虽然场景分辨率提高,但可视场景却成倍减小。Single-camera optical zoom relies on the structure of the optical lens to achieve zooming. The camera lens moves to zoom in and out of the scene to be photographed. The larger the optical zoom factor, the farther the scene can be photographed. General optical zoom cameras are expensive, and after zooming, although the scene resolution is improved, the visible scene is reduced exponentially.
单摄像机数字变焦的原理与光学变焦不同,它是把原来CCD影像传感器上的一部份像素使用“插值”处理手段做放大,将CCD影像传感器上的像素用插值算法将画面放大到整个画面。实际上是画面的电子放大,虽然拍摄的场景放大,但其场景分辨率没有实质意义上的提高。同时,单摄像机数字变焦方法也存在变焦后可视场景变小的不足。The principle of single-camera digital zoom is different from optical zoom. It uses "interpolation" processing method to enlarge some pixels on the original CCD image sensor, and uses interpolation algorithm to enlarge the picture to the whole picture. In fact, it is an electronic magnification of the picture. Although the captured scene is enlarged, the resolution of the scene has not been substantially improved. At the same time, the single-camera digital zoom method also has the disadvantage that the visible scene becomes smaller after zooming.
国内外一些专利也提出多分辨率图像采集的装置和方法,中国专利CN1176351C提出的双声光照明发射器、CN2476040Y提出的反射镜组、CN1164962C提出的总光程变化装置、美国专利申请20060077475提出的使用玻璃镜、电路、透镜杆和光敏传感器阵列组合装置,都试图解决多分辨率图像采集,但由于其装置属于单摄像机类型,并未解决可视场景自动缩小的问题。美国专利申请20050111754提出一种多分辨率图像融合的方法,但并未给出图像采集装置及控制参数约束关系。Some patents at home and abroad also propose devices and methods for multi-resolution image acquisition. Chinese patent CN1176351C proposes a dual acousto-optic lighting transmitter, CN2476040Y proposes a reflector group, CN1164962C proposes a total optical path changing device, and U.S. patent application 20060077475 proposes Using glass mirrors, circuits, lens rods and photosensitive sensor array combination devices, all try to solve multi-resolution image acquisition, but because the device is a single camera type, it does not solve the problem of automatic zooming out of the visible scene. US Patent Application No. 20050111754 proposes a method for multi-resolution image fusion, but does not provide constraints on image acquisition devices and control parameters.
此外,根据单摄像机光学变焦存在可视场景变小的不足,可以考虑多光学变焦摄像机拍摄采集的情况。虽然可以解决可视场景大小的问题,但有引入图像分辨率不易控制的缺点,且装置成本会更昂贵。In addition, according to the disadvantage that the visual scene becomes smaller due to the optical zoom of a single camera, the situation of shooting and collecting by multiple optical zoom cameras can be considered. Although it can solve the problem of the size of the visible scene, it has the disadvantage that the image resolution is not easy to control, and the cost of the device will be more expensive.
总的来说,现有的多分辨率图像采集装置和方法存在可视场景小或不易采集控制的不足。Generally speaking, the existing multi-resolution image acquisition devices and methods have the disadvantages of small visible scene or difficult acquisition control.
发明内容Contents of the invention
本发明的目的之一是:克服现有技术的不足,提供一种实现较大可视场景的多分辨率图像采集装置;目的之二是提出在上述装置基础上多分辨率图像采集的控制方法。One of the purposes of the present invention is: to overcome the deficiencies in the prior art, to provide a multi-resolution image acquisition device that realizes a larger visual scene; the second purpose is to propose a control method for multi-resolution image acquisition based on the above-mentioned device .
本发明的技术解决方案:一种采用多定焦摄像机实现多分辨率图像采集的装置,包括5台具有位置约束关系的定焦摄像机,其中4台摄像机处于同一水平面上,位于同一个正方形的4个顶点上,且4台摄像机的焦距相同,设为fs;另外1台摄像机位于上述4台摄像机的一方,该一台摄像机的轴心线垂直于4台摄像机面且经过正方形的中心点O,且该第5台摄像机到其余4台摄像机所在平面的距离为d,设该摄像机的焦距为ft,对5台定焦摄像机的参数和位置作初始化设置,其位置关系满足如下约束:ft=fs+d。The technical solution of the present invention: a device that adopts multiple fixed-focus cameras to realize multi-resolution image acquisition, including 5 fixed-focus cameras with position constraints, of which 4 cameras are on the same horizontal plane, located in the same square 4 vertex, and the focal lengths of the four cameras are the same, set it as f s ; another camera is located on one side of the above four cameras, and the axis line of this camera is perpendicular to the plane of the four cameras and passes through the center point O of the square , and the distance from the fifth camera to the plane where the other four cameras are located is d, and the focal length of the camera is f t , the parameters and positions of the five fixed-focus cameras are initialized, and their positional relationship satisfies the following constraints: f t =f s +d.
本发明装置的工作原理是:5台定焦摄像机分为全场景采集摄像机和细节采集摄像机两组。全场景采集摄像机1台且位置固定,保证获取全场景的图像信息,且场景范围不会因图像分辨率调整变化;细节采集摄像机4台,分别采集4个子正方形场景区域的图像,根据摄像机成像原理和摄像机间几何位置关系,将细节采集摄像机的数据映射到全场景采集摄像机拍摄的图像中,实现较大可视场景的多分辨率图像采集装置。设细节采集摄像机采集图像坐标为(u1,v1),(u2,v2),(u3,v3),(u4,v4),映射到全场景图像坐标变为
本发明提出的一种使用多定焦摄像机实现多分辨率场景采集的控制方法,包括以下步骤:A control method for realizing multi-resolution scene acquisition by using multiple fixed-focus cameras proposed by the present invention comprises the following steps:
(1)自动指定场景中的可见目标对象,或者通过人工操作人为的指定场景中的可见目标对象;(1) Automatically specify the visible target objects in the scene, or manually specify the visible target objects in the scene;
(2)根据目标对象的范围进行背景剔除,得到目标对象前景;(2) Perform background elimination according to the scope of the target object to obtain the foreground of the target object;
(3)根据目标对象前景,确定目标对象成像显示子区域,并在子区域内布置场景细节采集摄像机和全场景采集摄像机;(3) Determine the imaging display sub-area of the target object according to the foreground of the target object, and arrange the scene detail acquisition camera and the whole scene acquisition camera in the sub-area;
(4)通过子区域内的摄像机采集图像数据,生成高分辨率场景概观图;(5)对高分辨率场景概观图,指定其中的目标对象无损分辨率放大倍数;(4) Collect image data through cameras in the sub-area to generate a high-resolution scene overview; (5) specify the lossless resolution magnification of the target object in the high-resolution scene overview;
(6)对放大后的目标对象边缘与背景差值进行融合;(6) Fusing the edge of the enlarged target object with the background difference;
(7)判断融合的目标对象是否移动,如果移动则转步骤(2);如果未移动则转步骤(4),重复采集图像信息。(7) Judging whether the fused target object moves, if it moves, go to step (2); if it does not move, go to step (4), and repeatedly collect image information.
本发明方法的原理是:使用背景分割等图像处理方法确定目标对象,通过子区域内布置的细节采集摄像机采集数据按像素位移公式进行变化,完成目标对象的无损分辨率放大,应用插值融合算法使目标对象与场景图像融合,实现多分辨率场景采集控制。The principle of the method of the present invention is: use image processing methods such as background segmentation to determine the target object, change the data collected by the detail acquisition camera arranged in the sub-region according to the pixel displacement formula, complete the lossless resolution amplification of the target object, and apply the interpolation fusion algorithm to make The target object is fused with the scene image to realize multi-resolution scene acquisition control.
本发明与现有技术相比的有益效果是:The beneficial effect of the present invention compared with prior art is:
(1)本发明装置设置了全场景采集摄像机和细节采集摄像机对同一拍摄场景进行图像采集,获得的目标对象信息包括场景概观信息和子场景细节信息,使用场景概观信息可保证可视场景范围不发生变化,有效避免单摄像机变焦拍摄时,获取高分辨率图像时可视场景变小的不足,实现多定焦摄像机在较大可视场景中“变焦”拍摄功能。并且对同一场景有两份图像采集信息互为备份,成像质量更稳定。(1) The device of the present invention is equipped with a full-scene capture camera and a detail capture camera to capture images of the same shooting scene, and the obtained target object information includes scene overview information and sub-scene detail information. Using the scene overview information can ensure that the visible scene range does not occur Changes, effectively avoiding the problem that the visible scene becomes smaller when the high-resolution image is obtained when a single camera is zoomed, and realize the "zoom" shooting function of multiple fixed-focus cameras in a larger visible scene. And there are two sets of image acquisition information for the same scene as mutual backup, and the imaging quality is more stable.
(2)本发明装置设置的细节采集摄像机获得目标对象的子场景信息,可对场景的细节信息做进一步描绘,且是真实的采集数据,克服了数字变焦摄像机电子放大的变焦方法会影响图像的精确度的缺点。(2) The detail acquisition camera that the device of the present invention is provided with obtains the sub-scene information of the target object, can further describe the detail information of the scene, and is real acquisition data, overcomes the problem that the zoom method of digital zoom camera electronic amplification can affect the image The disadvantage of precision.
(3)本发明方法相对于其它图像采集方法,无需手工调节摄像机的焦距或光圈,只需在发明方法的第1步中手工或自动选定目标对象,在第5步中设定无损分辨率放大倍数,便可自动完成多分辨率场景图像快速采集,具有手工操作步骤简单,目标对象选定灵活,图像细节可调整、易控制的优势。(3) Compared with other image acquisition methods, the method of the present invention does not need to manually adjust the focal length or aperture of the camera, only needs to manually or automatically select the target object in the first step of the inventive method, and set the lossless resolution in the fifth step The magnification can automatically complete the rapid acquisition of multi-resolution scene images. It has the advantages of simple manual operation steps, flexible selection of target objects, adjustable image details, and easy control.
附图说明Description of drawings
图1为本发明的多定焦摄像机装置示意图;Fig. 1 is a schematic diagram of a multi-focus camera device of the present invention;
图2为本发明实例中5台摄像机焦点所形成的几何关系图;Fig. 2 is the geometric relation figure that 5 camera focal points form in the example of the present invention;
图3为本发明的摄像机成像分辨率与焦距的关系示意图;Fig. 3 is a schematic diagram of the relationship between camera imaging resolution and focal length of the present invention;
图4为本发明的多分辨率图像采集方法流程图。FIG. 4 is a flow chart of the multi-resolution image acquisition method of the present invention.
具体实施方式Detailed ways
如图1所示,本发明设置5台定焦摄像机,右侧4台摄像机处于同一水平面上,位于同一个正方形的4个顶点上,分别对应图中的B、C、D、E四点,且4台摄像机的焦距相同,设为fs;另外一台摄像机位于上述4台摄像机的左方,对应图中A点,其轴心线垂直于4摄像机面且经过正方形的中心点,对应图中O点,且到该点的距离为d,设该摄像机的焦距为ft。对5台定焦摄像机的参数和位置作初始化设置,其位置关系满足如下约束:ft=fs+d。As shown in Figure 1, the present invention is provided with 5 fixed-focus cameras, and the 4 cameras on the right are on the same horizontal plane, located on the 4 vertices of the same square, corresponding to the four points B, C, D, and E in the figure, And the focal lengths of the four cameras are the same, which is set to f s ; another camera is located on the left of the above four cameras, corresponding to point A in the figure, and its axis line is perpendicular to the plane of the four cameras and passes through the center point of the square, corresponding to Point O in the middle, and the distance to this point is d, let the focal length of the camera be f t . The parameters and positions of the five fixed-focus cameras are initialized, and their positional relationship satisfies the following constraints: f t =f s +d.
本发明装置的工作原理和过程是:5台定焦摄像机分为全场景采集摄像机和细节采集摄像机两组。全场景采集摄像机1台且位置固定,保证获取全场景的图像信息,且场景范围不会因图像分辨率调整变化;细节采集摄像机4台,分别采集4个子正方形场景区域的图像,根据摄像机成像原理和摄像机间几何位置关系,将细节采集摄像机的数据映射到全场景采集摄像机拍摄的图像中,实现较大可视场景的多分辨率图像采集装置。全场景采集摄像机首先开始采集图像,其余的4台细节采集摄像机根据多分辨率图像采集控制方法自主工作,由此获得被拍摄对象表面不同分辨率像素表示,完成多分辨率调节。The working principle and process of the device of the present invention are as follows: five fixed-focus cameras are divided into two groups of full-scene acquisition cameras and detail acquisition cameras. One full-scene acquisition camera with a fixed position ensures that the image information of the entire scene can be obtained, and the scene range will not change due to image resolution adjustment; four detail acquisition cameras collect images of four sub-square scene areas respectively, according to the camera imaging principle According to the geometric position relationship between the camera and the camera, the data of the detail acquisition camera is mapped to the image captured by the full scene acquisition camera, so as to realize the multi-resolution image acquisition device of a larger visual scene. The full-scene capture camera starts to capture images first, and the remaining four detail capture cameras work autonomously according to the multi-resolution image capture control method, thereby obtaining different resolution pixel representations of the surface of the object to be photographed, and completing multi-resolution adjustment.
如图2所示,在步骤1初始化设置后,5台摄像机在场景中的焦点共面,且存在图2所示的几何关系。取右侧4台摄像机的成像平面左下角为图像坐标系原点,对应图中点O1,O2,O3,O4,并且每台摄像机视点中心到原点的距离为m。5台定焦摄像机的可视场景空间为右侧4台摄像机自焦点到后景深区间内的锥平台并集与左方摄像机可视锥平台的交集空间。As shown in Figure 2, after the initial settings in
如图3所示,根据摄像机成像原理:Oc-XcYcZc是摄像机坐标系,O-XY是成像平面坐标系,O′-UV是图像平面坐标系。P点在摄像机坐标系下的坐标为(Xc,Yc,Zc),P′点坐标为(x,y,f);P′点在图像坐标系下的坐标为(u,v)。根据立体几何比例关系有:As shown in Figure 3, according to the camera imaging principle: O c -X c Y c Z c is the camera coordinate system, O-XY is the imaging plane coordinate system, and O′-UV is the image plane coordinate system. The coordinates of point P in the camera coordinate system are (X c , Y c , Z c ), the coordinates of point P′ are (x, y, f); the coordinates of point P′ in the image coordinate system are (u, v) . According to the three-dimensional geometric proportion relationship:
设摄像机在x轴上的视角为θx,分辨率为ux,在y轴上的视角为θy,分辨率为uy,则P′在图像上的像素坐标为(u,v)为:Suppose the viewing angle of the camera on the x-axis is θ x , the resolution is u x , the viewing angle on the y-axis is θ y , and the resolution is u y , then the pixel coordinates of P′ on the image are (u, v) :
其中,fx,fy代表摄像机在x,y两个方向上的焦距,dx,dy是每一个像素在图像平面x轴和y轴上的物理尺寸。(u0,v0)为摄像机光轴与图像平面的物理交点。Among them, f x and f y represent the focal length of the camera in the x and y directions, and dx and dy are the physical dimensions of each pixel on the x-axis and y-axis of the image plane. (u 0 , v 0 ) is the physical intersection of the camera optical axis and the image plane.
如图2所示,设右侧4台摄像机的图像平面坐标系原点分别为O1,O2,O3,O4,右方摄像机的图像平面坐标系原点为O3,并令其为统一坐标系的坐标原点。设右侧4台摄像机据上层摄像机光轴距离为m,则右侧4台摄像机在原坐标系下的任一点(u1,v1),(u2,v2),(u3,v3),(u4,v4)分别对应统一坐标系的坐标为
如图4所示,给出一种多分辨率图像采集方法的流程示意图,实现场景图像分辨率的调节和控制,包括(1)自动或人工指定观察的目标对象;(2)目标对象的背景剔除;(3)划分目标对象的成像显示子区域;(4)子区域摄像机采集图像数据,生成高分辨率场景概观图;(5)指定目标对象无损分辨率放大;(6)目标对象边缘与背景差值融合;(7)判断目标对象是否移动,重复采集图像信息共七个步骤,以下分别展开说明:As shown in Figure 4, a flow diagram of a multi-resolution image acquisition method is given to realize the adjustment and control of the scene image resolution, including (1) automatically or manually specifying the target object for observation; (2) the background of the target object Eliminate; (3) Divide the imaging display sub-region of the target object; (4) Collect image data from the sub-region camera to generate a high-resolution scene overview; (5) Specify the lossless resolution of the target object to enlarge; (6) Target object edge and Background difference fusion; (7) Determine whether the target object is moving, and repeat the seven steps of collecting image information, which are explained separately as follows:
步骤4.1,通过模式识别的方法自动指定场景中的可见目标对象,或者通过人工操作人为的指定场景中的可见目标对象。当背景图像和目标对象图像色差明显时,采用与背景颜色一致的软件过滤器将背景剔除,自动选定剩余的可见目标对象图像。当背景较为复杂,或目标对象与图像色差相近时,人工的在场景概观图像中设置关键点,关键点彼此相连形成一凸多边形,作为指定的可见目标对象。In step 4.1, the visible target objects in the scene are automatically specified by means of pattern recognition, or the visible target objects in the scene are specified manually by manual operation. When the color difference between the background image and the target object image is obvious, use a software filter with the same color as the background to remove the background, and automatically select the remaining visible target object images. When the background is complex, or the color difference between the target object and the image is similar, key points are manually set in the scene overview image, and the key points are connected to each other to form a convex polygon as the specified visible target object.
步骤4.2,根据4.1确定的目标对象范围,将目标对象前景与背景相分离。如果在步骤4.1用自动指定目标对象方法,已经将背景剔除,此步骤可略;如果是人为指定目标对象方法,将凸多边形外部的图像作为背景剔除,剩余部分图像即为目标对象前景。In step 4.2, the foreground of the target object is separated from the background according to the range of the target object determined in 4.1. If the background has been eliminated by the method of automatically specifying the target object in step 4.1, this step can be omitted; if the method of manually specifying the target object is used, the image outside the convex polygon is used as the background to be removed, and the remaining part of the image is the foreground of the target object.
步骤4.3,根据4.2确定的目标对象前景,按图2所示的图像分块中,确定目标对象成像的显示子区域。在场景概观图像中,按图2将图像划分为4块大小相等对称的正方形子场景,并保证每个子场景有一台子场景细节图像采集摄像机负责。目标对象图像在场景划分的过程中也被划分为4个显示子区域,当然,也包括部分子区域不含有目标对象像素点的情况。Step 4.3, according to the foreground of the target object determined in 4.2, according to the image block shown in FIG. 2, determine the display sub-region of the target object imaging. In the scene overview image, divide the image into four equal-sized and symmetrical square sub-scenes according to Figure 2, and ensure that each sub-scene has a sub-scene detail image acquisition camera. The target object image is also divided into four display sub-regions during the scene division process, and of course, the case that some sub-regions do not contain target object pixels is also included.
步骤4.4,根据4.3计算的目标对象成像显示子区域,确定负责该区域成像的摄像机开始采集数据。以场景概观图像像素坐标为基础,子场景图像采集摄像机采集所得图像坐标为(u1,v1),(u2,v2),(u3,v3),(u4,v4),对应到场景概观图像坐标位置分别为
步骤4.5,根据输入参数放大或调整4.4确定的目标对象成像区域象素点。输入目标对象的放大倍数α,最小为1,表示不放大。以目标对象区域的中心为原点,调整目标对象区域像素点的距离,每个原像素点朝上下左右四个方向平移原先象素点距离的α倍。设上下两个相邻像素点的距离为m;左右两个相邻像素点的距离为n,则放大后的距离分别变为α·m和α·n。Step 4.5, enlarge or adjust the pixel points of the imaging area of the target object determined in 4.4 according to the input parameters. Input the magnification α of the target object, the minimum is 1, which means no zoom. Taking the center of the target object area as the origin, adjust the distance of the pixel points in the target object area, and each original pixel point translates α times of the original pixel point distance in the four directions of up, down, left, and right. Suppose the distance between the upper and lower adjacent pixels is m; the distance between the left and right adjacent pixels is n, then the enlarged distances become α·m and α·n respectively.
步骤4.6,根据4.4对目标对象放大或调整,当α倍数大于1时,必然会遮挡原有背景。将放大的目标对象作为新目标对象,使用图形学中常用的线性插值算法,做新目标对象边缘和新背景的插值融合运算,实现放大目标对象与背景的平滑过渡。设新目标对象像素点的RGB信息为NR,NG,NB,与其相邻的背景像素点的RGB信息为NR′,NG′,NB′,则插入的n-1个融合像素点的RGB信息依次为:In step 4.6, the target object is enlarged or adjusted according to 4.4. When the α multiple is greater than 1, the original background must be blocked. The enlarged target object is used as a new target object, and the linear interpolation algorithm commonly used in graphics is used to perform interpolation and fusion operations on the edge of the new target object and the new background to achieve a smooth transition between the enlarged target object and the background. Suppose the RGB information of the pixel of the new target object is N R , N G , N B , and the RGB information of the adjacent background pixel is N R ′, N G ′, N B ′, then the inserted n-1 fusion The RGB information of the pixel is as follows:
……
步骤4.7,通过视频帧做差的方法判定指定目标对象是否移动,如果前后两帧图像中,目标对象的象素点位置发生偏移,即视频帧做差的结果大于一定阀值(如N=10)时,说明目标对象移动,则转到步骤4.2;否则转到步骤4.4。设采集的视频前后两帧图像对应象素点的RGB信息值为NR,NG,NB和「,则视频帧做差的结果为N=(NR′-NR)+(NG′-NG)+(NB′-NB)。Step 4.7, determine whether the specified target object moves by the method of video frame difference, if in the two frame images before and after, the pixel point position of the target object deviates, that is, the result of video frame difference is greater than a certain threshold (as N= 10), it means that the target object is moving, then go to step 4.2; otherwise go to step 4.4. Assuming that the RGB information values of the pixels corresponding to the two frames before and after the collected video are N R , N G , N B and ", then the result of video frame difference is N=(N R ′ -NR )+(N G '-N G )+(N B '-N B ).
由于图像采集过程是一个循环过程,在图4中没有给出流程结束的示意表示。Since the image acquisition process is a cyclic process, no schematic representation of the end of the process is given in FIG. 4 .
最后应说明的是,以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明利用多定焦摄像机实现多分辨率图像采集的原理前提下,还可以做出若干改进或等同替换,这些改进和等同替换也应视为本发明的保护范围。Finally, it should be noted that the above description is only a preferred embodiment of the present invention, and it should be pointed out that, for those of ordinary skill in the art, without departing from the principle of using multiple fixed-focus cameras to realize multi-resolution image acquisition in the present invention Under the premise, several improvements or equivalent replacements can also be made, and these improvements and equivalent replacements should also be regarded as the protection scope of the present invention.
Claims (9)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CNA200810101241XA CN101276415A (en) | 2008-03-03 | 2008-03-03 | Device and method for realizing multi-resolution image acquisition with multiple fixed-focus cameras |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CNA200810101241XA CN101276415A (en) | 2008-03-03 | 2008-03-03 | Device and method for realizing multi-resolution image acquisition with multiple fixed-focus cameras |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN101276415A true CN101276415A (en) | 2008-10-01 |
Family
ID=39995844
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNA200810101241XA Pending CN101276415A (en) | 2008-03-03 | 2008-03-03 | Device and method for realizing multi-resolution image acquisition with multiple fixed-focus cameras |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN101276415A (en) |
Cited By (53)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101789123B (en) * | 2010-01-27 | 2011-12-07 | 中国科学院半导体研究所 | Method for creating distance map based on monocular camera machine vision |
| CN103561236A (en) * | 2013-10-31 | 2014-02-05 | 厦门龙谛信息系统有限公司 | Building surrounding monitoring system and method |
| CN105205796A (en) * | 2014-06-30 | 2015-12-30 | 华为技术有限公司 | Wide-area image acquisition method and apparatus |
| US10156706B2 (en) | 2014-08-10 | 2018-12-18 | Corephotonics Ltd. | Zoom dual-aperture camera with folded lens |
| US10225479B2 (en) | 2013-06-13 | 2019-03-05 | Corephotonics Ltd. | Dual aperture zoom digital camera |
| US10230898B2 (en) | 2015-08-13 | 2019-03-12 | Corephotonics Ltd. | Dual aperture zoom camera with video support and switching / non-switching dynamic control |
| US10250797B2 (en) | 2013-08-01 | 2019-04-02 | Corephotonics Ltd. | Thin multi-aperture imaging system with auto-focus and methods for using same |
| US10284780B2 (en) | 2015-09-06 | 2019-05-07 | Corephotonics Ltd. | Auto focus and optical image stabilization with roll compensation in a compact folded camera |
| US10288896B2 (en) | 2013-07-04 | 2019-05-14 | Corephotonics Ltd. | Thin dual-aperture zoom digital camera |
| US10288897B2 (en) | 2015-04-02 | 2019-05-14 | Corephotonics Ltd. | Dual voice coil motor structure in a dual-optical module camera |
| US10488631B2 (en) | 2016-05-30 | 2019-11-26 | Corephotonics Ltd. | Rotational ball-guided voice coil motor |
| US10534153B2 (en) | 2017-02-23 | 2020-01-14 | Corephotonics Ltd. | Folded camera lens designs |
| US10578948B2 (en) | 2015-12-29 | 2020-03-03 | Corephotonics Ltd. | Dual-aperture zoom digital camera with automatic adjustable tele field of view |
| US10616484B2 (en) | 2016-06-19 | 2020-04-07 | Corephotonics Ltd. | Frame syncrhonization in a dual-aperture camera system |
| CN111008602A (en) * | 2019-12-06 | 2020-04-14 | 青岛海之晨工业装备有限公司 | Two-dimensional and three-dimensional visual combined lineation feature extraction method for small-curvature thin-wall part |
| US10645286B2 (en) | 2017-03-15 | 2020-05-05 | Corephotonics Ltd. | Camera with panoramic scanning range |
| US10694168B2 (en) | 2018-04-22 | 2020-06-23 | Corephotonics Ltd. | System and method for mitigating or preventing eye damage from structured light IR/NIR projector systems |
| US10706518B2 (en) | 2016-07-07 | 2020-07-07 | Corephotonics Ltd. | Dual camera system with improved video smooth transition by image blending |
| US10845565B2 (en) | 2016-07-07 | 2020-11-24 | Corephotonics Ltd. | Linear ball guided voice coil motor for folded optic |
| US10884321B2 (en) | 2017-01-12 | 2021-01-05 | Corephotonics Ltd. | Compact folded camera |
| US10904512B2 (en) | 2017-09-06 | 2021-01-26 | Corephotonics Ltd. | Combined stereoscopic and phase detection depth mapping in a dual aperture camera |
| USRE48444E1 (en) | 2012-11-28 | 2021-02-16 | Corephotonics Ltd. | High resolution thin multi-aperture imaging systems |
| US10951834B2 (en) | 2017-10-03 | 2021-03-16 | Corephotonics Ltd. | Synthetically enlarged camera aperture |
| US10976567B2 (en) | 2018-02-05 | 2021-04-13 | Corephotonics Ltd. | Reduced height penalty for folded camera |
| US11125975B2 (en) | 2015-01-03 | 2021-09-21 | Corephotonics Ltd. | Miniature telephoto lens module and a camera utilizing such a lens module |
| US11268830B2 (en) | 2018-04-23 | 2022-03-08 | Corephotonics Ltd | Optical-path folding-element with an extended two degree of freedom rotation range |
| US11287081B2 (en) | 2019-01-07 | 2022-03-29 | Corephotonics Ltd. | Rotation mechanism with sliding joint |
| US11315276B2 (en) | 2019-03-09 | 2022-04-26 | Corephotonics Ltd. | System and method for dynamic stereoscopic calibration |
| US11333955B2 (en) | 2017-11-23 | 2022-05-17 | Corephotonics Ltd. | Compact folded camera structure |
| US11363180B2 (en) | 2018-08-04 | 2022-06-14 | Corephotonics Ltd. | Switchable continuous display information system above camera |
| US11368631B1 (en) | 2019-07-31 | 2022-06-21 | Corephotonics Ltd. | System and method for creating background blur in camera panning or motion |
| CN114727009A (en) * | 2017-04-13 | 2022-07-08 | 弗劳恩霍夫应用研究促进协会 | Apparatus for imaging a local field of view, multi-aperture imaging apparatus and methods of providing these apparatus |
| US11635596B2 (en) | 2018-08-22 | 2023-04-25 | Corephotonics Ltd. | Two-state zoom folded camera |
| US11637977B2 (en) | 2020-07-15 | 2023-04-25 | Corephotonics Ltd. | Image sensors and sensing methods to obtain time-of-flight and phase detection information |
| US11659135B2 (en) | 2019-10-30 | 2023-05-23 | Corephotonics Ltd. | Slow or fast motion video using depth information |
| US11770618B2 (en) | 2019-12-09 | 2023-09-26 | Corephotonics Ltd. | Systems and methods for obtaining a smart panoramic image |
| US11770609B2 (en) | 2020-05-30 | 2023-09-26 | Corephotonics Ltd. | Systems and methods for obtaining a super macro image |
| US11832018B2 (en) | 2020-05-17 | 2023-11-28 | Corephotonics Ltd. | Image stitching in the presence of a full field of view reference image |
| US11910089B2 (en) | 2020-07-15 | 2024-02-20 | Corephotonics Lid. | Point of view aberrations correction in a scanning folded camera |
| US11949976B2 (en) | 2019-12-09 | 2024-04-02 | Corephotonics Ltd. | Systems and methods for obtaining a smart panoramic image |
| US11946775B2 (en) | 2020-07-31 | 2024-04-02 | Corephotonics Ltd. | Hall sensor—magnet geometry for large stroke linear position sensing |
| US11968453B2 (en) | 2020-08-12 | 2024-04-23 | Corephotonics Ltd. | Optical image stabilization in a scanning folded camera |
| US12007668B2 (en) | 2020-02-22 | 2024-06-11 | Corephotonics Ltd. | Split screen feature for macro photography |
| US12007671B2 (en) | 2021-06-08 | 2024-06-11 | Corephotonics Ltd. | Systems and cameras for tilting a focal plane of a super-macro image |
| US12081856B2 (en) | 2021-03-11 | 2024-09-03 | Corephotonics Lid. | Systems for pop-out camera |
| US12101575B2 (en) | 2020-12-26 | 2024-09-24 | Corephotonics Ltd. | Video support in a multi-aperture mobile camera with a scanning zoom camera |
| US12174272B2 (en) | 2020-04-26 | 2024-12-24 | Corephotonics Ltd. | Temperature control for hall bar sensor correction |
| US12328523B2 (en) | 2018-07-04 | 2025-06-10 | Corephotonics Ltd. | Cameras with scanning optical path folding elements for automotive or surveillance |
| US12328505B2 (en) | 2022-03-24 | 2025-06-10 | Corephotonics Ltd. | Slim compact lens optical image stabilization |
| US12352931B2 (en) | 2018-02-12 | 2025-07-08 | Corephotonics Ltd. | Folded camera with optical image stabilization |
| US12366762B2 (en) | 2016-12-28 | 2025-07-22 | Corephotonics Ltd. | Folded camera structure with an extended light- folding-element scanning range |
| US12520025B2 (en) | 2021-07-21 | 2026-01-06 | Corephotonics Ltd. | Pop-out mobile cameras and actuators |
| US12547055B2 (en) | 2024-01-10 | 2026-02-10 | Corephotonics Ltd. | Actuators for providing an extended two-degree of freedom rotation range |
-
2008
- 2008-03-03 CN CNA200810101241XA patent/CN101276415A/en active Pending
Cited By (167)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101789123B (en) * | 2010-01-27 | 2011-12-07 | 中国科学院半导体研究所 | Method for creating distance map based on monocular camera machine vision |
| USRE48945E1 (en) | 2012-11-28 | 2022-02-22 | Corephotonics Ltd. | High resolution thin multi-aperture imaging systems |
| USRE48477E1 (en) | 2012-11-28 | 2021-03-16 | Corephotonics Ltd | High resolution thin multi-aperture imaging systems |
| USRE49256E1 (en) | 2012-11-28 | 2022-10-18 | Corephotonics Ltd. | High resolution thin multi-aperture imaging systems |
| USRE48444E1 (en) | 2012-11-28 | 2021-02-16 | Corephotonics Ltd. | High resolution thin multi-aperture imaging systems |
| USRE48697E1 (en) | 2012-11-28 | 2021-08-17 | Corephotonics Ltd. | High resolution thin multi-aperture imaging systems |
| US10225479B2 (en) | 2013-06-13 | 2019-03-05 | Corephotonics Ltd. | Dual aperture zoom digital camera |
| US12262120B2 (en) | 2013-06-13 | 2025-03-25 | Corephotonics Ltd. | Dual aperture zoom digital camera |
| US10904444B2 (en) | 2013-06-13 | 2021-01-26 | Corephotonics Ltd. | Dual aperture zoom digital camera |
| US10841500B2 (en) | 2013-06-13 | 2020-11-17 | Corephotonics Ltd. | Dual aperture zoom digital camera |
| US10326942B2 (en) | 2013-06-13 | 2019-06-18 | Corephotonics Ltd. | Dual aperture zoom digital camera |
| US11838635B2 (en) | 2013-06-13 | 2023-12-05 | Corephotonics Ltd. | Dual aperture zoom digital camera |
| US12069371B2 (en) | 2013-06-13 | 2024-08-20 | Corephotonics Lid. | Dual aperture zoom digital camera |
| US11470257B2 (en) | 2013-06-13 | 2022-10-11 | Corephotonics Ltd. | Dual aperture zoom digital camera |
| US12265234B2 (en) | 2013-07-04 | 2025-04-01 | Corephotonics Ltd. | Thin dual-aperture zoom digital camera |
| US11852845B2 (en) | 2013-07-04 | 2023-12-26 | Corephotonics Ltd. | Thin dual-aperture zoom digital camera |
| US12164115B2 (en) | 2013-07-04 | 2024-12-10 | Corephotonics Ltd. | Thin dual-aperture zoom digital camera |
| US11614635B2 (en) | 2013-07-04 | 2023-03-28 | Corephotonics Ltd. | Thin dual-aperture zoom digital camera |
| US11287668B2 (en) | 2013-07-04 | 2022-03-29 | Corephotonics Ltd. | Thin dual-aperture zoom digital camera |
| US10288896B2 (en) | 2013-07-04 | 2019-05-14 | Corephotonics Ltd. | Thin dual-aperture zoom digital camera |
| US10620450B2 (en) | 2013-07-04 | 2020-04-14 | Corephotonics Ltd | Thin dual-aperture zoom digital camera |
| US10250797B2 (en) | 2013-08-01 | 2019-04-02 | Corephotonics Ltd. | Thin multi-aperture imaging system with auto-focus and methods for using same |
| US12114068B2 (en) | 2013-08-01 | 2024-10-08 | Corephotonics Ltd. | Thin multi-aperture imaging system with auto-focus and methods for using same |
| US11470235B2 (en) | 2013-08-01 | 2022-10-11 | Corephotonics Ltd. | Thin multi-aperture imaging system with autofocus and methods for using same |
| US11991444B2 (en) | 2013-08-01 | 2024-05-21 | Corephotonics Ltd. | Thin multi-aperture imaging system with auto-focus and methods for using same |
| US11856291B2 (en) | 2013-08-01 | 2023-12-26 | Corephotonics Ltd. | Thin multi-aperture imaging system with auto-focus and methods for using same |
| US11716535B2 (en) | 2013-08-01 | 2023-08-01 | Corephotonics Ltd. | Thin multi-aperture imaging system with auto-focus and methods for using same |
| US10469735B2 (en) | 2013-08-01 | 2019-11-05 | Corephotonics Ltd. | Thin multi-aperture imaging system with auto-focus and methods for using same |
| US12267588B2 (en) | 2013-08-01 | 2025-04-01 | Corephotonics Ltd. | Thin multi-aperture imaging system with auto-focus and methods for using same |
| US10694094B2 (en) | 2013-08-01 | 2020-06-23 | Corephotonics Ltd. | Thin multi-aperture imaging system with auto-focus and methods for using same |
| CN103561236A (en) * | 2013-10-31 | 2014-02-05 | 厦门龙谛信息系统有限公司 | Building surrounding monitoring system and method |
| CN105205796A (en) * | 2014-06-30 | 2015-12-30 | 华为技术有限公司 | Wide-area image acquisition method and apparatus |
| US10609282B2 (en) | 2014-06-30 | 2020-03-31 | Huawei Technologies Co., Ltd. | Wide-area image acquiring method and apparatus |
| US10509209B2 (en) | 2014-08-10 | 2019-12-17 | Corephotonics Ltd. | Zoom dual-aperture camera with folded lens |
| US11703668B2 (en) | 2014-08-10 | 2023-07-18 | Corephotonics Ltd. | Zoom dual-aperture camera with folded lens |
| US11543633B2 (en) | 2014-08-10 | 2023-01-03 | Corephotonics Ltd. | Zoom dual-aperture camera with folded lens |
| US12105268B2 (en) | 2014-08-10 | 2024-10-01 | Corephotonics Ltd. | Zoom dual-aperture camera with folded lens |
| US11982796B2 (en) | 2014-08-10 | 2024-05-14 | Corephotonics Ltd. | Zoom dual-aperture camera with folded lens |
| US12007537B2 (en) | 2014-08-10 | 2024-06-11 | Corephotonics Lid. | Zoom dual-aperture camera with folded lens |
| US11262559B2 (en) | 2014-08-10 | 2022-03-01 | Corephotonics Ltd | Zoom dual-aperture camera with folded lens |
| US10156706B2 (en) | 2014-08-10 | 2018-12-18 | Corephotonics Ltd. | Zoom dual-aperture camera with folded lens |
| US11042011B2 (en) | 2014-08-10 | 2021-06-22 | Corephotonics Ltd. | Zoom dual-aperture camera with folded lens |
| US10976527B2 (en) | 2014-08-10 | 2021-04-13 | Corephotonics Ltd. | Zoom dual-aperture camera with folded lens |
| US10571665B2 (en) | 2014-08-10 | 2020-02-25 | Corephotonics Ltd. | Zoom dual-aperture camera with folded lens |
| US11002947B2 (en) | 2014-08-10 | 2021-05-11 | Corephotonics Ltd. | Zoom dual-aperture camera with folded lens |
| US11994654B2 (en) | 2015-01-03 | 2024-05-28 | Corephotonics Ltd. | Miniature telephoto lens module and a camera utilizing such a lens module |
| US12259524B2 (en) | 2015-01-03 | 2025-03-25 | Corephotonics Ltd. | Miniature telephoto lens module and a camera utilizing such a lens module |
| US12216246B2 (en) | 2015-01-03 | 2025-02-04 | Corephotonics Ltd. | Miniature telephoto lens module and a camera utilizing such a lens module |
| US11125975B2 (en) | 2015-01-03 | 2021-09-21 | Corephotonics Ltd. | Miniature telephoto lens module and a camera utilizing such a lens module |
| US12405448B2 (en) | 2015-01-03 | 2025-09-02 | Corephotonics Ltd. | Miniature telephoto lens module and a camera utilizing such a lens module |
| US10288897B2 (en) | 2015-04-02 | 2019-05-14 | Corephotonics Ltd. | Dual voice coil motor structure in a dual-optical module camera |
| US10558058B2 (en) | 2015-04-02 | 2020-02-11 | Corephontonics Ltd. | Dual voice coil motor structure in a dual-optical module camera |
| US12231772B2 (en) | 2015-08-13 | 2025-02-18 | Corephotonics Ltd. | Dual aperture zoom camera with video support and switching/non-switching dynamic control |
| US10917576B2 (en) | 2015-08-13 | 2021-02-09 | Corephotonics Ltd. | Dual aperture zoom camera with video support and switching / non-switching dynamic control |
| US11770616B2 (en) | 2015-08-13 | 2023-09-26 | Corephotonics Ltd. | Dual aperture zoom camera with video support and switching / non-switching dynamic control |
| US10567666B2 (en) | 2015-08-13 | 2020-02-18 | Corephotonics Ltd. | Dual aperture zoom camera with video support and switching / non-switching dynamic control |
| US10230898B2 (en) | 2015-08-13 | 2019-03-12 | Corephotonics Ltd. | Dual aperture zoom camera with video support and switching / non-switching dynamic control |
| US10356332B2 (en) | 2015-08-13 | 2019-07-16 | Corephotonics Ltd. | Dual aperture zoom camera with video support and switching / non-switching dynamic control |
| US11350038B2 (en) | 2015-08-13 | 2022-05-31 | Corephotonics Ltd. | Dual aperture zoom camera with video support and switching / non-switching dynamic control |
| US11546518B2 (en) | 2015-08-13 | 2023-01-03 | Corephotonics Ltd. | Dual aperture zoom camera with video support and switching / non-switching dynamic control |
| US12022196B2 (en) | 2015-08-13 | 2024-06-25 | Corephotonics Ltd. | Dual aperture zoom camera with video support and switching / non-switching dynamic control |
| US12401904B2 (en) | 2015-08-13 | 2025-08-26 | Corephotonics Ltd. | Dual aperture zoom camera with video support and switching / non-switching dynamic control |
| US10284780B2 (en) | 2015-09-06 | 2019-05-07 | Corephotonics Ltd. | Auto focus and optical image stabilization with roll compensation in a compact folded camera |
| US10498961B2 (en) | 2015-09-06 | 2019-12-03 | Corephotonics Ltd. | Auto focus and optical image stabilization with roll compensation in a compact folded camera |
| US10578948B2 (en) | 2015-12-29 | 2020-03-03 | Corephotonics Ltd. | Dual-aperture zoom digital camera with automatic adjustable tele field of view |
| US11392009B2 (en) | 2015-12-29 | 2022-07-19 | Corephotonics Ltd. | Dual-aperture zoom digital camera with automatic adjustable tele field of view |
| US11726388B2 (en) | 2015-12-29 | 2023-08-15 | Corephotonics Ltd. | Dual-aperture zoom digital camera with automatic adjustable tele field of view |
| US11314146B2 (en) | 2015-12-29 | 2022-04-26 | Corephotonics Ltd. | Dual-aperture zoom digital camera with automatic adjustable tele field of view |
| US11599007B2 (en) | 2015-12-29 | 2023-03-07 | Corephotonics Ltd. | Dual-aperture zoom digital camera with automatic adjustable tele field of view |
| US10935870B2 (en) | 2015-12-29 | 2021-03-02 | Corephotonics Ltd. | Dual-aperture zoom digital camera with automatic adjustable tele field of view |
| US12372758B2 (en) | 2016-05-30 | 2025-07-29 | Corephotonics Ltd. | Rotational ball-guided voice coil motor |
| US11650400B2 (en) | 2016-05-30 | 2023-05-16 | Corephotonics Ltd. | Rotational ball-guided voice coil motor |
| US10488631B2 (en) | 2016-05-30 | 2019-11-26 | Corephotonics Ltd. | Rotational ball-guided voice coil motor |
| US11977210B2 (en) | 2016-05-30 | 2024-05-07 | Corephotonics Ltd. | Rotational ball-guided voice coil motor |
| US10616484B2 (en) | 2016-06-19 | 2020-04-07 | Corephotonics Ltd. | Frame syncrhonization in a dual-aperture camera system |
| US11689803B2 (en) | 2016-06-19 | 2023-06-27 | Corephotonics Ltd. | Frame synchronization in a dual-aperture camera system |
| US12200359B2 (en) | 2016-06-19 | 2025-01-14 | Corephotonics Ltd. | Frame synchronization in a dual-aperture camera system |
| US11172127B2 (en) | 2016-06-19 | 2021-11-09 | Corephotonics Ltd. | Frame synchronization in a dual-aperture camera system |
| US11550119B2 (en) | 2016-07-07 | 2023-01-10 | Corephotonics Ltd. | Linear ball guided voice coil motor for folded optic |
| US11977270B2 (en) | 2016-07-07 | 2024-05-07 | Corephotonics Lid. | Linear ball guided voice coil motor for folded optic |
| US11048060B2 (en) | 2016-07-07 | 2021-06-29 | Corephotonics Ltd. | Linear ball guided voice coil motor for folded optic |
| US12298590B2 (en) | 2016-07-07 | 2025-05-13 | Corephotonics Ltd. | Linear ball guided voice coil motor for folded optic |
| US10706518B2 (en) | 2016-07-07 | 2020-07-07 | Corephotonics Ltd. | Dual camera system with improved video smooth transition by image blending |
| US10845565B2 (en) | 2016-07-07 | 2020-11-24 | Corephotonics Ltd. | Linear ball guided voice coil motor for folded optic |
| US12124106B2 (en) | 2016-07-07 | 2024-10-22 | Corephotonics Ltd. | Linear ball guided voice coil motor for folded optic |
| US12366762B2 (en) | 2016-12-28 | 2025-07-22 | Corephotonics Ltd. | Folded camera structure with an extended light- folding-element scanning range |
| US11693297B2 (en) | 2017-01-12 | 2023-07-04 | Corephotonics Ltd. | Compact folded camera |
| US10884321B2 (en) | 2017-01-12 | 2021-01-05 | Corephotonics Ltd. | Compact folded camera |
| US12038671B2 (en) | 2017-01-12 | 2024-07-16 | Corephotonics Ltd. | Compact folded camera |
| US11815790B2 (en) | 2017-01-12 | 2023-11-14 | Corephotonics Ltd. | Compact folded camera |
| US12259639B2 (en) | 2017-01-12 | 2025-03-25 | Corephotonics Ltd. | Compact folded camera |
| US11809065B2 (en) | 2017-01-12 | 2023-11-07 | Corephotonics Ltd. | Compact folded camera |
| US10571644B2 (en) | 2017-02-23 | 2020-02-25 | Corephotonics Ltd. | Folded camera lens designs |
| US10534153B2 (en) | 2017-02-23 | 2020-01-14 | Corephotonics Ltd. | Folded camera lens designs |
| US10670827B2 (en) | 2017-02-23 | 2020-06-02 | Corephotonics Ltd. | Folded camera lens designs |
| US12309496B2 (en) | 2017-03-15 | 2025-05-20 | Corephotonics Ltd. | Camera with panoramic scanning range |
| US11671711B2 (en) | 2017-03-15 | 2023-06-06 | Corephotonics Ltd. | Imaging system with panoramic scanning range |
| US10645286B2 (en) | 2017-03-15 | 2020-05-05 | Corephotonics Ltd. | Camera with panoramic scanning range |
| CN114727009A (en) * | 2017-04-13 | 2022-07-08 | 弗劳恩霍夫应用研究促进协会 | Apparatus for imaging a local field of view, multi-aperture imaging apparatus and methods of providing these apparatus |
| US10904512B2 (en) | 2017-09-06 | 2021-01-26 | Corephotonics Ltd. | Combined stereoscopic and phase detection depth mapping in a dual aperture camera |
| US10951834B2 (en) | 2017-10-03 | 2021-03-16 | Corephotonics Ltd. | Synthetically enlarged camera aperture |
| US11695896B2 (en) | 2017-10-03 | 2023-07-04 | Corephotonics Ltd. | Synthetically enlarged camera aperture |
| US11619864B2 (en) | 2017-11-23 | 2023-04-04 | Corephotonics Ltd. | Compact folded camera structure |
| US11333955B2 (en) | 2017-11-23 | 2022-05-17 | Corephotonics Ltd. | Compact folded camera structure |
| US12189274B2 (en) | 2017-11-23 | 2025-01-07 | Corephotonics Ltd. | Compact folded camera structure |
| US12007672B2 (en) | 2017-11-23 | 2024-06-11 | Corephotonics Ltd. | Compact folded camera structure |
| US12372856B2 (en) | 2017-11-23 | 2025-07-29 | Corephotonics Ltd. | Compact folded camera structure |
| US11809066B2 (en) | 2017-11-23 | 2023-11-07 | Corephotonics Ltd. | Compact folded camera structure |
| US10976567B2 (en) | 2018-02-05 | 2021-04-13 | Corephotonics Ltd. | Reduced height penalty for folded camera |
| US12007582B2 (en) | 2018-02-05 | 2024-06-11 | Corephotonics Ltd. | Reduced height penalty for folded camera |
| US11686952B2 (en) | 2018-02-05 | 2023-06-27 | Corephotonics Ltd. | Reduced height penalty for folded camera |
| US12352931B2 (en) | 2018-02-12 | 2025-07-08 | Corephotonics Ltd. | Folded camera with optical image stabilization |
| US10911740B2 (en) | 2018-04-22 | 2021-02-02 | Corephotonics Ltd. | System and method for mitigating or preventing eye damage from structured light IR/NIR projector systems |
| US10694168B2 (en) | 2018-04-22 | 2020-06-23 | Corephotonics Ltd. | System and method for mitigating or preventing eye damage from structured light IR/NIR projector systems |
| US11733064B1 (en) | 2018-04-23 | 2023-08-22 | Corephotonics Ltd. | Optical-path folding-element with an extended two degree of freedom rotation range |
| US12085421B2 (en) | 2018-04-23 | 2024-09-10 | Corephotonics Ltd. | Optical-path folding-element with an extended two degree of freedom rotation range |
| US11268830B2 (en) | 2018-04-23 | 2022-03-08 | Corephotonics Ltd | Optical-path folding-element with an extended two degree of freedom rotation range |
| US11359937B2 (en) | 2018-04-23 | 2022-06-14 | Corephotonics Ltd. | Optical-path folding-element with an extended two degree of freedom rotation range |
| US11976949B2 (en) | 2018-04-23 | 2024-05-07 | Corephotonics Lid. | Optical-path folding-element with an extended two degree of freedom rotation range |
| US12379230B2 (en) | 2018-04-23 | 2025-08-05 | Corephotonics Ltd. | Optical-path folding-element with an extended two degree of freedom rotation range |
| US11268829B2 (en) | 2018-04-23 | 2022-03-08 | Corephotonics Ltd | Optical-path folding-element with an extended two degree of freedom rotation range |
| US11867535B2 (en) | 2018-04-23 | 2024-01-09 | Corephotonics Ltd. | Optical-path folding-element with an extended two degree of freedom rotation range |
| US12328523B2 (en) | 2018-07-04 | 2025-06-10 | Corephotonics Ltd. | Cameras with scanning optical path folding elements for automotive or surveillance |
| US11363180B2 (en) | 2018-08-04 | 2022-06-14 | Corephotonics Ltd. | Switchable continuous display information system above camera |
| US11635596B2 (en) | 2018-08-22 | 2023-04-25 | Corephotonics Ltd. | Two-state zoom folded camera |
| US11852790B2 (en) | 2018-08-22 | 2023-12-26 | Corephotonics Ltd. | Two-state zoom folded camera |
| US11287081B2 (en) | 2019-01-07 | 2022-03-29 | Corephotonics Ltd. | Rotation mechanism with sliding joint |
| US12025260B2 (en) | 2019-01-07 | 2024-07-02 | Corephotonics Ltd. | Rotation mechanism with sliding joint |
| US11527006B2 (en) | 2019-03-09 | 2022-12-13 | Corephotonics Ltd. | System and method for dynamic stereoscopic calibration |
| US11315276B2 (en) | 2019-03-09 | 2022-04-26 | Corephotonics Ltd. | System and method for dynamic stereoscopic calibration |
| US11368631B1 (en) | 2019-07-31 | 2022-06-21 | Corephotonics Ltd. | System and method for creating background blur in camera panning or motion |
| US12177596B2 (en) | 2019-07-31 | 2024-12-24 | Corephotonics Ltd. | System and method for creating background blur in camera panning or motion |
| US12495119B2 (en) | 2019-07-31 | 2025-12-09 | Corephotonics Ltd. | System and method for creating background blur in camera panning or motion |
| US11659135B2 (en) | 2019-10-30 | 2023-05-23 | Corephotonics Ltd. | Slow or fast motion video using depth information |
| CN111008602A (en) * | 2019-12-06 | 2020-04-14 | 青岛海之晨工业装备有限公司 | Two-dimensional and three-dimensional visual combined lineation feature extraction method for small-curvature thin-wall part |
| US11949976B2 (en) | 2019-12-09 | 2024-04-02 | Corephotonics Ltd. | Systems and methods for obtaining a smart panoramic image |
| US12075151B2 (en) | 2019-12-09 | 2024-08-27 | Corephotonics Ltd. | Systems and methods for obtaining a smart panoramic image |
| US11770618B2 (en) | 2019-12-09 | 2023-09-26 | Corephotonics Ltd. | Systems and methods for obtaining a smart panoramic image |
| US12328496B2 (en) | 2019-12-09 | 2025-06-10 | Corephotonics Ltd. | Systems and methods for obtaining a smart panoramic image |
| US12007668B2 (en) | 2020-02-22 | 2024-06-11 | Corephotonics Ltd. | Split screen feature for macro photography |
| US12443091B2 (en) | 2020-02-22 | 2025-10-14 | Corephotonics Ltd. | Split screen feature for macro photography |
| US12174272B2 (en) | 2020-04-26 | 2024-12-24 | Corephotonics Ltd. | Temperature control for hall bar sensor correction |
| US11832018B2 (en) | 2020-05-17 | 2023-11-28 | Corephotonics Ltd. | Image stitching in the presence of a full field of view reference image |
| US12096150B2 (en) | 2020-05-17 | 2024-09-17 | Corephotonics Ltd. | Image stitching in the presence of a full field of view reference image |
| US12167130B2 (en) | 2020-05-30 | 2024-12-10 | Corephotonics Ltd. | Systems and methods for obtaining a super macro image |
| US11770609B2 (en) | 2020-05-30 | 2023-09-26 | Corephotonics Ltd. | Systems and methods for obtaining a super macro image |
| US11962901B2 (en) | 2020-05-30 | 2024-04-16 | Corephotonics Ltd. | Systems and methods for obtaining a super macro image |
| US12395733B2 (en) | 2020-05-30 | 2025-08-19 | Corephotonics Ltd. | Systems and methods for obtaining a super macro image |
| US11910089B2 (en) | 2020-07-15 | 2024-02-20 | Corephotonics Lid. | Point of view aberrations correction in a scanning folded camera |
| US11637977B2 (en) | 2020-07-15 | 2023-04-25 | Corephotonics Ltd. | Image sensors and sensing methods to obtain time-of-flight and phase detection information |
| US12003874B2 (en) | 2020-07-15 | 2024-06-04 | Corephotonics Ltd. | Image sensors and sensing methods to obtain Time-of-Flight and phase detection information |
| US12192654B2 (en) | 2020-07-15 | 2025-01-07 | Corephotonics Ltd. | Image sensors and sensing methods to obtain time-of-flight and phase detection information |
| US12368975B2 (en) | 2020-07-15 | 2025-07-22 | Corephotonics Ltd. | Image sensors and sensing methods to obtain time-of-flight and phase detection information |
| US11832008B2 (en) | 2020-07-15 | 2023-11-28 | Corephotonics Ltd. | Image sensors and sensing methods to obtain time-of-flight and phase detection information |
| US12108151B2 (en) | 2020-07-15 | 2024-10-01 | Corephotonics Ltd. | Point of view aberrations correction in a scanning folded camera |
| US11946775B2 (en) | 2020-07-31 | 2024-04-02 | Corephotonics Ltd. | Hall sensor—magnet geometry for large stroke linear position sensing |
| US12247851B2 (en) | 2020-07-31 | 2025-03-11 | Corephotonics Ltd. | Hall sensor—magnet geometry for large stroke linear position sensing |
| US12442665B2 (en) | 2020-07-31 | 2025-10-14 | Corephotonics Ltd. | Hall sensor—magnet geometry for large stroke linear position sensing |
| US12184980B2 (en) | 2020-08-12 | 2024-12-31 | Corephotonics Ltd. | Optical image stabilization in a scanning folded camera |
| US11968453B2 (en) | 2020-08-12 | 2024-04-23 | Corephotonics Ltd. | Optical image stabilization in a scanning folded camera |
| US12101575B2 (en) | 2020-12-26 | 2024-09-24 | Corephotonics Ltd. | Video support in a multi-aperture mobile camera with a scanning zoom camera |
| US12439142B2 (en) | 2021-03-11 | 2025-10-07 | Corephotonics Ltd . | Systems for pop-out camera |
| US12081856B2 (en) | 2021-03-11 | 2024-09-03 | Corephotonics Lid. | Systems for pop-out camera |
| US12007671B2 (en) | 2021-06-08 | 2024-06-11 | Corephotonics Ltd. | Systems and cameras for tilting a focal plane of a super-macro image |
| US12520025B2 (en) | 2021-07-21 | 2026-01-06 | Corephotonics Ltd. | Pop-out mobile cameras and actuators |
| US12328505B2 (en) | 2022-03-24 | 2025-06-10 | Corephotonics Ltd. | Slim compact lens optical image stabilization |
| US12547055B2 (en) | 2024-01-10 | 2026-02-10 | Corephotonics Ltd. | Actuators for providing an extended two-degree of freedom rotation range |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101276415A (en) | Device and method for realizing multi-resolution image acquisition with multiple fixed-focus cameras | |
| CN101272511B (en) | Method and device for acquiring image depth information and image pixel information | |
| US10425638B2 (en) | Equipment and method for promptly performing calibration and verification of intrinsic and extrinsic parameters of a plurality of image capturing elements installed on electronic device | |
| CN110211043B (en) | Registration method based on grid optimization for panoramic image stitching | |
| CN102148965B (en) | Multi-target tracking close-up shooting video monitoring system | |
| CN102984453B (en) | Single camera is utilized to generate the method and system of hemisphere full-view video image in real time | |
| US8189089B1 (en) | Methods and apparatus for reducing plenoptic camera artifacts | |
| CN106412426B (en) | All-focus photography device and method | |
| CN104065859B (en) | A kind of acquisition methods and camera head of full depth image | |
| WO2018201809A1 (en) | Double cameras-based image processing device and method | |
| CN111818304B (en) | Image fusion method and device | |
| CN110782394A (en) | Panoramic video rapid splicing method and system | |
| CN111641775A (en) | Multi-shooting zoom control method, device and electronic system | |
| CN102291527B (en) | Panoramic video roaming method and device based on single fisheye lens | |
| US20110025830A1 (en) | Methods, systems, and computer-readable storage media for generating stereoscopic content via depth map creation | |
| CN107659774A (en) | A kind of video imaging system and method for processing video frequency based on multiple dimensioned camera array | |
| CN206563985U (en) | 3-D imaging system | |
| WO2014023231A1 (en) | Wide-view-field ultrahigh-resolution optical imaging system and method | |
| CN104867125B (en) | Obtain the method and device of image | |
| WO2011014421A2 (en) | Methods, systems, and computer-readable storage media for generating stereoscopic content via depth map creation | |
| CN114331835A (en) | Panoramic image splicing method and device based on optimal mapping matrix | |
| CN111770326B (en) | Indoor three-dimensional monitoring method for panoramic video projection | |
| CN105137606B (en) | Stereo vision imaging apparatus and method based on DMD | |
| CN106067937A (en) | Lens module array, image sensing device and digital zoom image fusion method | |
| CN108198132A (en) | The method of integration imaging image reconstruction based on Block- matching |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C12 | Rejection of a patent application after its publication | ||
| RJ01 | Rejection of invention patent application after publication |
Open date: 20081001 |