Fastest-lap is a vehicle dynamics simulator. It can be used to understand vehicle dynamics, to learn about driving techniques, to design car prototypes, or just for fun!




-
Numerical G-G diagram: given a vehicle, and a speed, to compute its ax-ay diagram. The G-G diagram is a useful technique in vehicle design and parameters exploration.
This is solved as an optimization problem: for a given lateral acceleration, find the minimum/maximum feasible longitudinal acceleration.
-
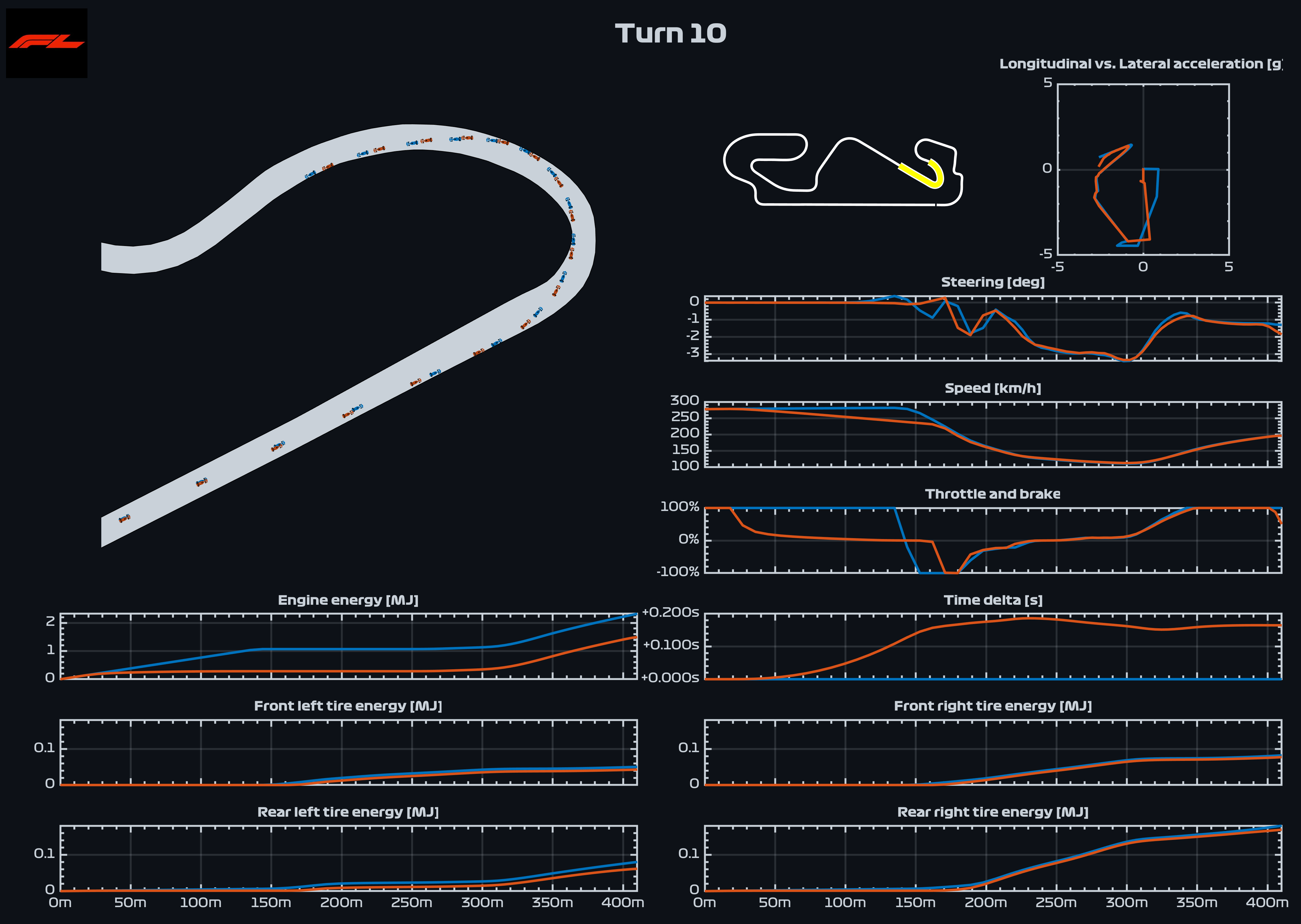
Optimal laptime simulation: given a vehicle, and a circuit, to compute the optimal controls that minimize the laptime.
This problem is solved using a first order collocation method, the trapezoidal rule, with higher-order methods planned to be implemented soon. The NLP is solved using Ipopt, and CppAD to enhance its performance (a lap-time around Circuit de Catalunya can be obtained with 500 points in approximately 1 minute).
This is not a quasi-steady-state simulation. The model solves the fully transient states as in the dynamic equations without steady-state assumptions.
ferrari-2022-australia.mp4
The core of the software is a C++ library, that can be used through a Python API. Full documentation is not yet available but some examples can be found in examples/python. Fastest-lap is very efficient, being able to compute a full optimal lap in less than 1 minute.
The code implements two car models:
- A 3DOF car model (longitudinal, lateral, and yaw), currently used for F1 simulations. The default parameters used can be found in ./database/limebeer-2014-f1.xml
- A 6DOF car model (longitudinal, lateral, vertial, yaw, pitch and roll), currently used for Go-kart simulations. The default parameters used can be found in ./database/roberto-lot-2016-kart.xml
Circuits are modeled from paths created from google earth, for example, the right track limit of Catalunya is included in this repository (database/google_earth/Catalunya_right.kml). Circuits are then preprocessed with a tool included herein to extract a reference line, its curvature, and the distance to the left/right track limits (database/catalunya_discrete.xml).
Fastest-lap uses several open-source libraries:
- Ipopt: Interior Point OPTimizer, is an open source software package for large-scale nonlinear optimization. Used within this project to obtain the solution to optimal laptime problems written as NLP (Non-linear programming problem).
- CppAD: C++ Algorithmic Differentiation. Distributed alongside Ipopt, it is used to compute analytical derivatives.
- Tinyxml2: TinyXML-2 is a simple, small, efficient, C++ XML parser, used to read XML files (e.g. model parameters, tracks,...)
- logger-cpp: a simple logger in C++, to handle print levels, and other interesting add-ons
- lion-cpp: lightweigh interfaces for optimization and numerics, a C++ package manager for all the libraries mentioned above, plus other numerical methods such as mechanical frames, vector algebra, and Runge--Kutta schemes
Precompiled binaries are available to download for every release.
Download and unzip. The contents of the zip folder are:
- bin: the dynamic libraries. Fastest-lap C++ core is there. If fastest-lap is used from MATLAB, point
loadlibrary()to this directory. - include: fastestlapc.h and fastest_lap.py. To use python scripts, make sure this folder is on the
PYTHONPATH - examples: python notebook examples.
- database: car and track data
This project uses CMake to build the source code and produce the binaries.
The canonical steps to compile a CMake project are: (assume $FASTESTLAP is the source code top level.)
- Create a build folder.
mkdir ${FASTESTLAP}/build
- From the build folder, run cmake
cd ${FASTESTLAP}/build && cmake ..
The options available for cmake are:
-DCMAKE_BUILD_TYPE=Debug/Release
-DCMAKE_INSTALL_PREFIX=/path/to/install/dir
-DCODE_COVERAGE=Yes/No: enables code coverage (if so, use with -DCMAKE_BUILD_TYPE=Debug)
-DBUILD_DOC=Yes/No: builds doxygen documentation
At this stage, CMake will download and install all the thirdparty dependencies.
- Compile
make
- Test (optional but recommended)
ctest --verbose
- Install (optional)
make install
A Docker build environment is provided and can be used to compile the shared library and generate the Python bindings.
sh ./src/scripts/linux/docker_compile.shRead the latest fastest-lap online documentation
[1] Tremlett, A. J., and D. J. N. Limebeer. "Optimal tyre usage for a formula one car." Vehicle System Dynamics 54.10 (2016): 1448-1473.
[2] Lot, Roberto, and Nicola Dal Bianco. "Lap time optimisation of a racing go-kart." Vehicle System Dynamics 54.2 (2016): 210-230.
[3] Dal Bianco, Nicola, Roberto Lot, and Marco Gadola. "Minimum time optimal control simulation of a GP2 race car." Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering 232.9 (2018): 1180-1195.
[4] Lot, Roberto, and Matteo Massaro. "A symbolic approach to the multibody modeling of road vehicles." International Journal of Applied Mechanics 9.05 (2017): 1750068.
[5] Kelly, Daniel P., and Robin S. Sharp. "Time-optimal control of the race car: a numerical method to emulate the ideal driver." Vehicle System Dynamics 48.12 (2010): 1461-1474.
[6] Piccinini, Mattia. "Path planning and control of self-driving vehicles at the limits of handling"
[7] Casanova, D. "On minimum time vehicle manoeuvring: the theoretical optimal lap"
[8] Perantoni, G. et al. "Optimal Control for a Formula One Car with Variable Parameters"