This is the unofficial pytorch implementation of CVPR2020 paper "VectorNet: Encoding HD Maps and Agent Dynamics from Vectorized Representation". (And it's a part of test of the summer camp 2020 organized by IIIS, Tsinghua University.)
https://eval.ai/challenge/454/overview
-
运行环境
python 3.7, Pytorch1.1.0, torchvision0.3.0, cuda9.0
-
文件说明
----- VectorNet
+--- ArgoverseDataset.py 数据集读取、预处理、转换为tensor
+--- subgraph_net.py polyline subgraph相关类实现
+--- gnn.py 带Attention机制的GCN,因为图是全连接,所以没有用dgl
+--- vectornet.py 把subgraph和GNN合并起来的model,loss计算
+--- train.py 网络训练入口,会保存checkpoint
+--- test.py 网络测试入口,同时实现了评估函数,会保存inference结果
+--- Visualization.ipynb 可视化vectorize的HD map
-
运行准备
- 安装argoverse-api且按照说明,将HD map数据放置到指定位置
- 下载forecast数据集,将train.py和test.py中
cfg['data_locate']修改为解压位置
-
代码函数解读
-
ArgoverseDataset.py
定义了类
class ArgoverseForecastDataset(torch.utils.data.Dataset)-
def __init__(self, cfg)类初始化,主要步骤有self.axis_range = self.get_map_range(self.am) #用于normalize坐标 self.city_halluc_bbox_table, self.city_halluc_tableidx_to_laneid_map = self.am.build_hallucinated_lane_bbox_index() self.vector_map, self.extra_map = self.generate_vector_map()
调用argoverse api读取HD map数据,重点是
generate_vector_map函数 -
def generate_vector_map(self)读取HD map并转换成vector利用argoverse api的
get_lane_segment_polygon(key, city_name)获取道路边沿的采样点,以论文指定的vector的方式拼接,该api是得到polygon,而我们只要两个边沿,因此做了一些处理同时将相关semantic label获取,返回至extra_map,待后续组装进vector内
-
def __getitem__(self, index)迭代获取数据函数,在该函数中读取了trajectory数据,同时对坐标进行了一系列预处理,最后转换为tensor获取trajectory同样利用argoverse api,数据预处理主要分为3个步骤
(1)平移坐标使last_observe移到中心
(2)rotate利用齐次坐标旋转矩阵实现,夹角利用向量内积获得
(3)normalize这里通过线性变换把坐标normalize到一定范围,这里认为last_observe的位置就是数据集分布的中心,即 $$ x = \frac{x}{max-min} $$
-
__getitem__返回self.traj_feature, self.map_feature
其中
self.traj_feature是$N\times feature$ 维的tensor指示轨迹polyline的vector集合self.map_feature是一个有三个key的dict,map_feature['PIT']和map_feature['MIA']是list,分别是两座城市道路的polyline的list,即list的每一个元素是一个$N\times feature$ 维的tensor,指示一条道路的polyline,map_feature['city_name']保存该trajectory所在的城市def get_trajectory(self, index)与generate_vector_map类似,区别在于trajectory是针对timestamp进行轨迹拼接,同时需要将timestamp装入向量中作为semantic label的信息
-
-
subgraph_net.py
定义了类
class SubgraphNet(nn.Module)和class SubgraphNet_Layer(nn.Module)-
类
class SubgraphNet_Layer输入:$N\times feature$ 维的单polyline tensor
输出:$N\times (feature+global\ feature)$ 维的单polyline tensor
实现了单层的SubgraphNet,按照文章叙述,encoder是一个MLP,具体由一个全连接层、一个layer_norm 和一个RELU激发层组成,随后是max_pool提取全局信息,最后concatenate将信息整合,与Point R-CNN相似
-
类
class SubgraphNet输入:$N\times feature$ 维的单polyline tensor
输出:$1\times (feature+global\ feature)$ 维的单polyline tensor
将 3 层SubgraphNet_Layer组合,最后max_pool提取代表性信息
-
-
gnn.py
定义了类
class GraphAttentionNet(nn.Module)-
类
class GraphAttentionNet输入:$K\times (feature+global\ feature)$ 维的全图特征信息
输出:$K\times value\ dims$ 维的传播后全图特征信息
因为在本论文中,将邻接矩阵定义为全连接矩阵,因此没有建图实现消息传播的必要性。Attention机制在本类中加以实现,公式即为 $$ GNN(P)=softmax(P_QP_K^T)P_V $$ 注意:这里进行的都是矩阵计算。$P_Q$是查询,$P_K$是key,$P_V$是值,softmax一步是获得各value的权重
具体的实现参考了论文Attention is All you need
-
-
vectornet.py
定义了类
class VectorNet(nn.Module)-
类
class VectorNet本类的 forward 分 train 和 evaluate 两种情况输入:trajectory_batch, mapfeature_batch
输出:train时输出loss,evaluate时输出预测结果predictions和真值label
- 由于不同道路的polyline采样点数不同,因此在dataset数据读取时把它放入了list中,因此在本类中会首先完成对数据的拆包
- 然后构造两个SubgraphNet类,
traj_subgraphnet,和map_subgraphnet将不同polyline的信息,都处理为$1\times (feature+global\ feature)$ 维的polyline信息,然后concatenate起来 - 此后会进行L2 normalize以有效训练后面的GNN,正则化后直接传入GNN,并得到传播后的vector信息
$1\times value\ dims$ 维,decoder使用了MLP与subgraph_net参数相似,但多加了一层全连接网络以生成回归坐标 - 如果是train则使用torch.nn.MSEloss计算损失,可以证明在误差服从标准高斯分布时,Gaussian Negative Likelihood Loss就是MSEloss,它们本质上是等价的。如果是evaluate则把prediction和label一起输出,在test.py中实现Average Displacement Error的计算
-
-
train.py
网络训练入口
-
def main()首先初始化一些参数,为代码简便,这里把配置(cfg)直接编码在代码中,更合适的做法应是利用 argparse 通过命令行传入。然后实例化dataset,利用dataloader打包为minibatch,初始化model,设置优化器,和步长自调节器
另外这里使用tensorboard可视化损失,文件保存在 ./run/文件夹下,因此需要初始化SummaryWriter
-
def do_train(model, cfg, train_loader, optimizer, scheduler, writer)较为常见的主训练循环,每 5 个epoch调节一次步长,每10个epoch保存一次模型参数,训练结束保存一次模型参数,输出每2个iteration(minibatch)输出一次信息,采用logger保存日志文件
-
-
test.py
网络推断入口
-
def main()与train.py几乎相同,注意cfg['model_path']模型参数文件路径和cfg['save_path']推理结果存储路径两个参数
-
def inference(model, cfg, val_loader)较do_train有所简化,因为无需再处理vector_map数据,已经被编码进网络里(只使用了一层的GNN),将输出的result和label用list保存起来,调用
evaluate()函数计算ADE指标 -
def evaluate(dataset, predictions, labels)传入dataset是因为需要把预处理过的数据,变换回原始坐标,即先反归一化,然后逆向旋转,最后平移,ADE loss即是预测点和真值点间欧氏距离的平均,inference的结果保存在路径cfg['save_path']下
-
-
-
一些可视化的结果(详见visualization.ipynb)
- loss 收敛(150组数据,训练了25个epoch,adadelta优化器,有点过拟合)


- baseline的结果(150组数据,训练了10个epoch,9步预测)

- 地图矢量化


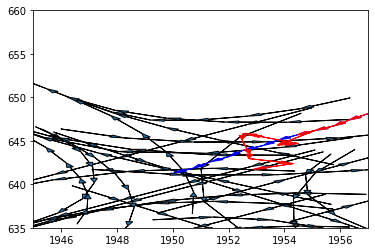
- 轨迹预测(蓝色的是label,红色是预测,十字路口场景呈现回归现象)
- loss 收敛(150组数据,训练了25个epoch,adadelta优化器,有点过拟合)