Update:
-
demostration video: https://youtu.be/q81QQVIy3yA?feature=shared
-
Some old opencv api has been updated.
-
Disable
show_trackin configuration yaml if it start up with a remote ssh. -
Rebundent dictionary file has removed.
- Memory leak problem is fixed.
- We trained a DBOW vocabulary with LIP6Indoor dataset. This model achieves 95% of the performance of the original model, and much smaller.
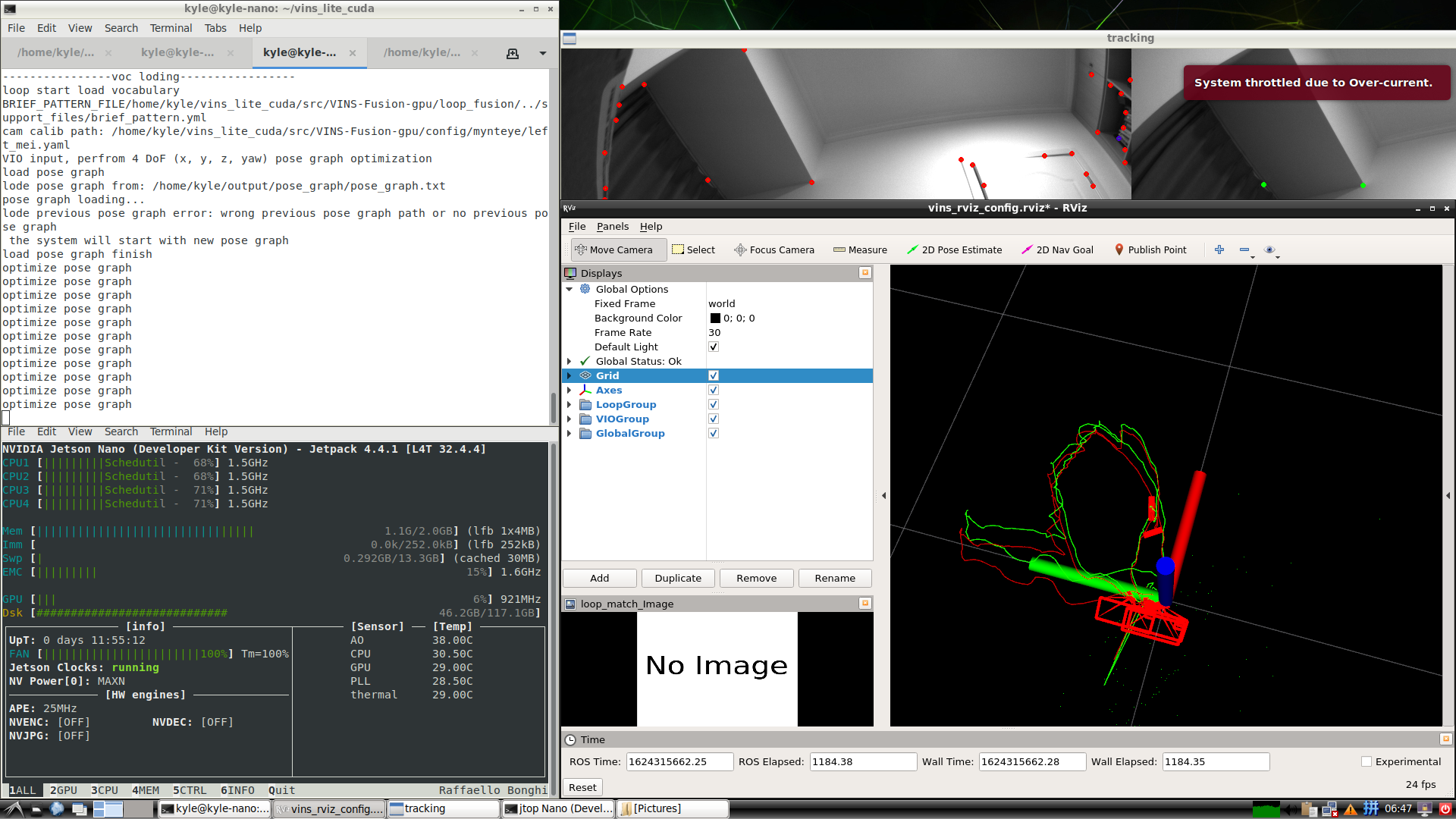
- We have test this model on Nvidia Jetson Nano 2GB version with MYNTEYE s1030-ir. The RAM consumption is about 60MB when program starts up. The usage of RAM will increase with the number of keyframe or running time. The GPU consumption is about 20%.
It can be very easy to reach 30fps on Jetson Nano 2GB with half feature number cut down. Please check the pose_graph in RVIZ rather than tracking image view. The pose_graph is realtime, but the tracking image view has a serious delay. Here is my configuration:
multiple_thread: 4
max_cnt: 75
freq: 30 # frequence (Hz) of publish tracking result. At least 10Hz for good estimation.
max_solver_time: 0.02 # max solver itration time (ms), to guarantee real time
max_num_iterations: 4 # max solver itrations, to guarantee real timePlease follow original VINS FUSION GPU. The installation process is identical. You may need vitrual memory to compile the program.
The Jetson devices in our experiment is supported by NVIDIA Jetson Nano 2GB Developer Kit Grant Program.