
A Novel V2V Cooperative Collision Warning System Using UWB/DR for Intelligent Vehicles


<p>Vehicle axis system.</p> "> Figure 2
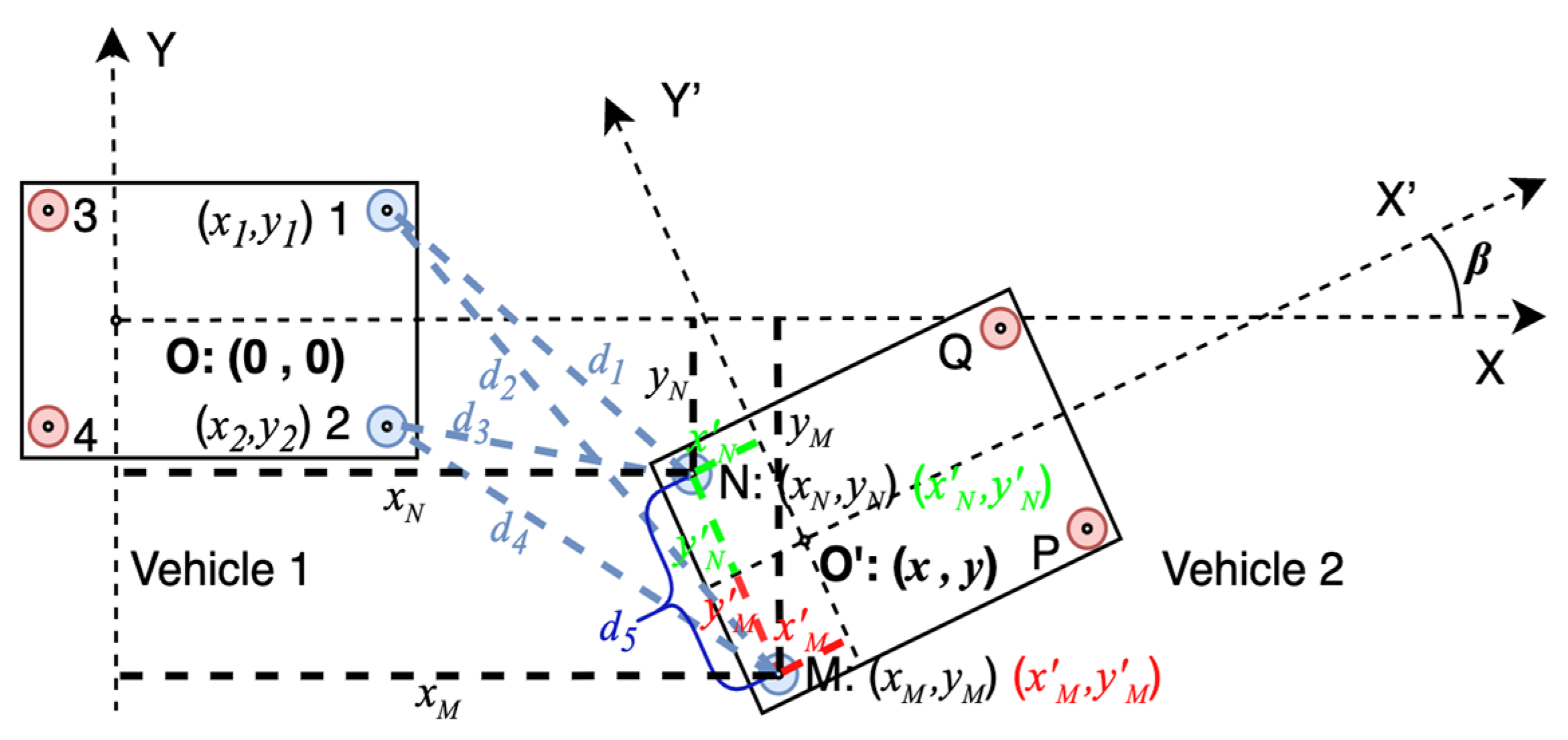
<p>The UWB based relative positioning system model.</p> "> Figure 3
<p>Two sets of solutions.</p> "> Figure 4
<p>Ackerman steering model.</p> "> Figure 5
<p>The relative kinematic model.</p> "> Figure 6
<p>Collision types. (<b>a</b>) Point-to-edge collision; (<b>b</b>) Edge-to-edge collision; (<b>c</b>) Point-to-point collision.</p> "> Figure 7
<p>The collision warning model.</p> "> Figure 8
<p>The virtual scenario in the driving scenario designer.</p> "> Figure 9
<p>Comparison of relative positioning and directing algorithm with and without the constraint of <span class="html-italic">d</span><sub>5</sub>: (<b>a</b>) The relative longitudinal position <span class="html-italic">x</span>; (<b>b</b>) The relative lateral position <span class="html-italic">y</span>; (<b>c</b>) The relative orientation <span class="html-italic">β</span>.</p> "> Figure 10
<p>Comparison of positioning and directing performance using UWB and fusion of UWB/DR: (<b>a</b>) The relative longitudinal position <span class="html-italic">x</span>; (<b>b</b>) The relative lateral position <span class="html-italic">y</span>; (<b>c</b>) The relative orientation <span class="html-italic">β</span>.</p> "> Figure 11
<p>Comparison of yaw rates measured by DR and estimated by UWB/DR: (<b>a</b>) Yaw rate of vehicle 1; (<b>b</b>) Yaw rate of vehicle 2.</p> "> Figure 12
<p>Comparison of velocities measured by DR and estimated by UWB/DR: (<b>a</b>) Velocity of vehicle 1; (<b>b</b>) Velocity of vehicle 2.</p> "> Figure 13
<p>TTC simulating scenarios.</p> "> Figure 14
<p>TTC estimation error.</p> "> Figure 15
<p>Experimental Equipment.</p> "> Figure 16
<p>The testing ground and vehicle driving routes.</p> "> Figure 17
<p>Vehicle state display software.</p> "> Figure 18
<p>Test 1 in the straight driving experiments.</p> "> Figure 19
<p>Test 2 in the straight driving experiments.</p> "> Figure 20
<p>Test 3 in the straight driving experiments.</p> "> Figure 21
<p>The transformation from Cartesian coordinates to polar coordinates.</p> "> Figure 22
<p>The results of the middle-distance experiments. (<b>a</b>) Relative distance; (<b>b</b>) Relative azimuth angle; (<b>c</b>) Relative velocity; (<b>d</b>) Relative orientation.</p> "> Figure 23
<p>The results of the long-distance experiments. (<b>a</b>) Relative distance; (<b>b</b>) Relative azimuth angle; (<b>c</b>) Relative velocity; (<b>d</b>) Relative orientation.</p> ">
Abstract
:1. Introduction
2. Algorithm and Modeling
2.1. The Relative Positioning and Directing System
2.2. The DR System Based on Wheel Speed Sensors
2.3. The EKF Based UWB/DR Fusion Model

2.4. The Collision Warning Model
3. Simulation
3.1. Simulation of the Overconstrained UWB Positioning and Directing System
3.2. Simulation of the UWB/DR Fusion Algorithm
3.3. Simulation of CWS based on TTC Estimation
- “Failed” denotes warning too late or not warning;
- “Correct” denotes warning in the proper time period;
- “False” denotes warning too early or warning by mistake.
4. Experiments
4.1. Experimental Equipment and Environment
4.2. Straight Driving Experiments
4.2.1. Test 1
4.2.2. Test 2
4.2.3. Test 3
4.2.4. Results Analysis of the Straight Driving Experiments
4.3. Curved Driving Experiments
4.3.1. Middle-Distance Experiments
4.3.2. Long-Distance Experiments
4.3.3. Results Analysis of the Curved Experiments
5. Conclusions
- The fusion method significantly improves the relative positioning/directing accuracy and slightly improves the velocity accuracy according to the simulation and experiment results.
- The proposed CWS passes the regulated tests in JT/T883-2014 published by MOT, which proves the feasibility of the proposed system.
- In middle-distance mode up to 50 m, compared to the MMWR, the proposed system improves the relative positioning/directing accuracy by 44%, 69%, and 8%, respectively, in the relative distance, azimuth angle, and velocity. As for in long-distance mode, the enhanced rate is 66% and 38%, respectively, for the relative distance and azimuth angle. The relative velocity accuracy of the proposed system is similar to the MMWR.
- In both middle and long-distance modes, the proposed system can provide relative orientations with errors no more than 0.4° RMSE, which is not available directly in MMWR systems, but it is very beneficial to the CWS.
Author Contributions
Funding
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- World Health Organization (WHO). Global Status Report on Road Safety 2018. Available online: https://www.who.int/violence_injury_prevention/road_safety_status/2018/en/ (accessed on 7 October 2020).
- Kusano, K.D.; Gabler, H.C. Safety Benefits of Forward Collision Warning, Brake Assist, and Autonomous Braking Systems in Rear-End Collisions. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1546–1555. [Google Scholar] [CrossRef]
- Owens, J.M.; Dingus, T.A.; Guo, F.; Fang, Y.; Perez, M.; McClafferty, J.; Tefft, B. Prevalence of Drowsy Driving Crashes: Estimates from a Large-Scale Naturalistic Driving Study. AAA Foundation for Traffic Safety: Wahsington, WA., USA, 2018. [Google Scholar]
- Ewald, A.; Willhoeft, V. Laser Scanners for Obstacle Detection in Automotive Applications. In Proceedings of the IEEE Intelligent Vehicles Symposium 2000 (Cat. No.00TH8511), Dearborn, MI, USA, 5 October 2000; pp. 682–687. [Google Scholar]
- Chen, S.-K.; Parikh, J.S. Developing a Forward Collision Warning System Simulation. In Proceedings of the IEEE Intelligent Vehicles Symposium 2000 (Cat. No.00TH8511), Dearborn, MI, USA, 5 October 2000; pp. 338–343. [Google Scholar]
- Kim, J.; Han, D.S.; Senouci, B. Radar and Vision Sensor Fusion for Object Detection in Autonomous Vehicle Surroundings. In Proceedings of the 2018 Tenth International Conference on Ubiquitous and Future Networks (ICUFN), Prague, Czech Republic, 3–6 July 2018; pp. 76–78. [Google Scholar]
- Peng, W.; Zhiqiang, L. The Study of Intelligent Vehicle Anti-Collision Forewarning Technology by Multi-Information Detection. In Proceedings of the 2013 Third International Conference on Intelligent System Design and Engineering Applications, Hong Kong, China, 16–18 January 2013; pp. 1557–1561. [Google Scholar]
- Srinivasa, N. Vision-Based Vehicle Detection and Tracking Method for Forward Collision Warning in Automobiles. In Proceedings of the Intelligent Vehicle Symposium, 2002. IEEE, Versailles, France, 17–21 June 2003; Volume 2, pp. 626–631. [Google Scholar]
- Liu, J.-F.; Su, Y.-F.; Ko, M.-K.; Yu, P.-N. Development of a Vision-Based Driver Assistance System with Lane Departure Warning and Forward Collision Warning Functions. In Proceedings of the 2008 Digital Image Computing: Techniques and Applications, Canberra, Australia, 1–3 December 2008; pp. 480–485. [Google Scholar]
- Shieh, W.-Y.; Hsu, C.-C.J.; Chen, H.-C.; Wang, T.-H.; Chen, C.-C. Construction of Infrared Signal-Direction Discriminator for Intervehicle Communication. IEEE Trans. Veh. Technol. 2015, 64, 2436–2447. [Google Scholar] [CrossRef]
- Sanberg, W.P.; Dubbelman, G. From Stixels to Asteroids: Towards a Collision Warning System Using Stereo Vision. Electron. Imaging 2019, 2019, 34-1–34-7. [Google Scholar] [CrossRef]
- Hernandez, D.C.; Filonenko, A.; Hariyono, J.; Shahbaz, A. Kang-Hyun Jo Laser Based Collision Warning System for High Conflict Vehicle-Pedestrian Zones. In Proceedings of the 2016 IEEE 25th International Symposium on Industrial Electronics (ISIE), Santa Clara, CA, USA, 8–10 June 2016; pp. 935–939. [Google Scholar]
- Coelingh, E.; Jakobsson, L.; Lind, H.; Lindman, M. Collision Warning with Auto Brake—A Real-Life Safety Perspective, Innovations for Safety: Opportunities and Challenges. In Proceedings of the 20th International Technical Conference on the Enhanced Safety of Vehicles (ESV), Lyon, France, 18–21 June 2017. [Google Scholar]
- Coelingh, E.; Eidehall, A.; Bengtsson, M. Collision Warning with Full Auto Brake and Pedestrian Detection—A Practical Example of Automatic Emergency Braking. In Proceedings of the 13th International IEEE Conference on Intelligent Transportation Systems, Funchal, Portugal, 19–22 September 2010; pp. 155–160. [Google Scholar]
- Srinivasa, N.; Chen, Y.; Daniell, C. A Fusion System for Real-Time Forward Collision Warning in Automobiles. In Proceedings of the 2003 IEEE International Conference on Intelligent Transportation Systems, Shanghai, China, 12–15 October 2003; pp. 457–462. [Google Scholar]
- Huang, C.; Lv, C.; Hang, P.; Xing, Y. Toward Safe and Personalized Autonomous Driving: Decision-Making and Motion Control with DPF and CDT Techniques. IEEE ASME Trans. Mechatron. 2021, 26, 611–620. [Google Scholar] [CrossRef]
- Huang, C.; Lv, C.; Hang, P.; Hu, Z.; Xing, Y. Human-Machine Adaptive Shared Control for Safe Automated Driving under Automation Degradation. arXiv 2021, arXiv:2103.04563. [Google Scholar]
- Huang, C.; Huang, H.; Hang, P.; Gao, H.; Wu, J.; Huang, Z.; Lv, C. Personalized Trajectory Planning and Control of Lane-Change Maneuvers for Autonomous Driving. IEEE Trans. Veh. Technol. 2021, 1. [Google Scholar] [CrossRef]
- Hang, P.; Lv, C. Human-Like Decision Making for Autonomous Driving: A Noncooperative Game Theoretic Approach. arXiv 2020, arXiv:2005.11064. [Google Scholar] [CrossRef]
- Hang, P.; Lv, C.; Huang, C.; Xing, Y.; Hu, Z. Cooperative Decision Making of Connected Automated Vehicles at Multi-Lane Merging Zone: A Coalitional Game Approach. arXiv 2021, arXiv:210307887. [Google Scholar]
- Chen, J.; Tian, S.; Xu, H.; Yue, R.; Sun, Y.; Cui, Y. Architecture of Vehicle Trajectories Extraction with Roadside LiDAR Serving Connected Vehicles. IEEE Access 2019, 7, 100406–100415. [Google Scholar] [CrossRef]
- Yang, W.; Wan, B.; Qu, X. A Forward Collision Warning System Using Driving Intention Recognition of the Front Vehicle and V2V Communication. IEEE Access 2020, 8, 11268–11278. [Google Scholar] [CrossRef]
- Xiang, X.; Qin, W.; Xiang, B. Research on a DSRC-Based Rear-End Collision Warning Model. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1054–1065. [Google Scholar] [CrossRef]
- Yang, T.; Zhang, Y.; Tan, J.; Qiu, T.Z. Research on Forward Collision Warning System Based on Connected Vehicle V2V Communication. In Proceedings of the 2019 5th International Conference on Transportation Information and Safety (ICTIS), Liverpool, UK, 14–17 July 2019; pp. 1174–1181. [Google Scholar]
- Patra, S.; Veelaert, P.; Calafate, C.; Cano, J.-C.; Zamora, W.; Manzoni, P.; González, F. A Forward Collision Warning System for Smartphones Using Image Processing and V2V Communication. Sensors 2018, 18, 2672. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Marano, S.; Gifford, W.; Wymeersch, H.; Win, M. NLOS Identification and Mitigation for Localization Based on UWB Experimental Data. IEEE J. Sel. Areas Commun. 2010, 28, 1026–1035. [Google Scholar] [CrossRef] [Green Version]
- Lu, Y.; Yi, J.; He, L.; Zhu, X.; Liu, P. A Hybrid Fusion Algorithm for Integrated INS/UWB Navigation and Its Application in Vehicle Platoon Formation Control. In Proceedings of the 2018 International Conference on Computer Science, Electronics and Communication Engineering (CSECE 2018); Wuhan, China, 7–8 February 2018, Atlantis Press: Sanya, China, 2018. [Google Scholar]
- Wang, M.; Zhou, A.; Chen, X.; Shen, Y.; Li, Z. A Novel Asynchronous UWB Positioning System for Autonomous Trucks in an Automated Container Terminal. SAE Int. J. Adv. Curr. Pract. Mobil. 2020, 2, 3413–3422. [Google Scholar] [CrossRef]
- Sun, S.; Hu, J.; Li, J.; Liu, R.; Shu, M.; Yang, Y. An INS-UWB Based Collision Avoidance System for AGV. Algorithms 2019, 12, 40. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Jin, F.; Lv, X.; Zhan, Y.S.; Zhang, D. Design and Development of Vehicle Collision-Avoidance System Based on UWB Wireless Sensor Networks. In Proceedings of the 7th International Conference on Computer Engineering and Networks—PoS (CENet2017); Shanghai, China, 22–23 July 2017, Sissa Medialab: Shanghai, China, 2017; p. 037. [Google Scholar]
- Pittokopiti, M.; Grammenos, R. Infrastructureless UWB Based Collision Avoidance System for the Safety of Construction Workers. In Proceedings of the 2019 26th International Conference on Telecommunications (ICT), Hanoi, Vietnam, 8–10 April 2019; pp. 490–495. [Google Scholar]
- Kianfar, A.E.; Uth, F.; Baltes, R.; Clausen, E. Development of a Robust Ultra-Wideband Module for Underground Positioning and Collision Avoidance. Min. Metall. Explor. 2020, 37, 1821–1825. [Google Scholar] [CrossRef]
- ISO 8855:2011. Available online: https://www.iso.org/cms/render/live/en/sites/isoorg/contents/data/standard/05/11/51180.html (accessed on 6 April 2021).
- Forkenbrock, G.J.; O’hara, B. A Forward Collision Warning (FCW) Performance Evaluation. In Proceedings of the International Technical Conference on the Enhanced Safety of Vehicles; Stuttgart, Germany, 15–18 June 2009, National Highway Traffic Safety Administration: Washington, DC, USA, 2009; Volume 2009. [Google Scholar]
- Transportation Industry Standard of the People’s Republic of China. In JT/T 883-2014: Commercial Vehicle Driving Dangerous Warning System Technical Requirements and Test Procedures; China Communications Press: Beijing, China, 2014.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | RMSEx (m) | RMSEy (m) | RMSEβ (°) |
|---|---|---|---|
| With d5 | 0.70 | 0.73 | 46.29 |
| Without d5 | 0.21 | 0.58 | 2.42 |
| Algorithm | RMSEx (m) | RMSEy (m) | RMSEβ (°) |
|---|---|---|---|
| UWB | 0.21 | 0.58 | 2.42 |
| UWB + DR (EKF) | 0.06 | 0.17 | 0.83 |
| Algorithm | ||||
|---|---|---|---|---|
| DR | 8.92 | 8.71 | 0.14 | 0.15 |
| UWB + DR (EKF) | 5.07 | 4.60 | 0.12 | 0.08 |
| Parameters | Range |
|---|---|
| v1&v2 (km/h) | 0~75 |
| x (m) | −200~200 |
| y (m) | −15~15 |
| β (°) | 0~360 |
| Evaluation | Quantity |
|---|---|
| Failed | 0 |
| Correct | 194 |
| False | 2 |
| Evaluation | Quantity |
|---|---|
| Failed | 0 |
| Correct | 10,596 |
| False | 227 |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | |
|---|---|---|---|---|---|---|---|
| TTC(CWS) | 2.9987 | 2.9907 | 2.9759 | 2.9814 | 2.9729 | 2.9722 | 2.9799 |
| TTC(Real) | 3.0047 | 3.0069 | 2.9925 | 2.9963 | 2.9902 | 3.0136 | 3.0219 |
| Evaluation | Pass | Pass | Pass | Pass | Pass | Pass | Pass |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | |
|---|---|---|---|---|---|---|---|
| TTC(CWS) | 2.9863 | 2.9810 | 2.9987 | 2.9804 | 2.9954 | 2.9899 | 2.9673 |
| TTC(Real) | 3.0423 | 3.1166 | 3.0245 | 3.0354 | 3.1283 | 3.1269 | 3.0226 |
| Evaluation | Pass | Pass | Pass | Pass | Pass | Pass | Pass |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | |
|---|---|---|---|---|---|---|---|
| TTC(CWS) | 2.9782 | 2.9905 | 2.9947 | 2.9789 | 2.9942 | 2.8623 | 2.8958 |
| TTC(Real) | 2.7560 | 2.8110 | 2.7877 | 2.6851 | 2.6511 | 2.5831 | 2.8975 |
| Evaluation | Pass | Pass | Pass | Pass | Pass | Pass | Pass |
| Mode | Coverage (m) | RMSEρ (m) | RMSEθ (°) | RMSEv (m/s) |
|---|---|---|---|---|
| Middle Distance | 50 | 0.25 | 1 | 0.12 |
| Long Distance | 100 | 0.5 | 0.5 | 0.12 |
| Mode | RMSEρ (m) | RMSEθ (°) | RMSEv (m/s) | RMSEβ (°) |
|---|---|---|---|---|
| No Fusion | 0.14 | 0.76 | 0.22 | 1.84 |
| Fusion | 0.14 | 0.31 | 0.11 | 0.39 |
| Mode | RMSEρ (m) | RMSEθ (°) | RMSEv (m/s) | RMSEβ (°) |
|---|---|---|---|---|
| No Fusion | 0.18 | 0.77 | 0.22 | 1.86 |
| Fusion | 0.17 | 0.31 | 0.12 | 0.40 |
| Mode | System | RMSEρ (m) | RMSEθ (°) | RMSEv (m/s) | RMSEβ (°) |
|---|---|---|---|---|---|
| Middle Distance | MMWR | 0.25 | 1 | 0.12 | None |
| Proposed System (No Fusion) | 0.14 | 0.76 | 0.22 | 1.84 | |
| Proposed System (Fusion) | 0.14 | 0.31 | 0.11 | 0.39 | |
| Long Distance | MMWR | 0.5 | 0.5 | 0.12 | None |
| Proposed System (No Fusion) | 0.18 | 0.77 | 0.24 | 1.86 | |
| Proposed System (Fusion) | 0.17 | 0.31 | 0.12 | 0.40 |
| Mode | RMSEρ (m) | RMSEθ (°) | RMSEv (m/s) |
|---|---|---|---|
| Middle Distance | 44% | 69% | 8% |
| Long Distance | 66% | 38% | 0% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, M.; Chen, X.; Jin, B.; Lv, P.; Wang, W.; Shen, Y. A Novel V2V Cooperative Collision Warning System Using UWB/DR for Intelligent Vehicles. Sensors 2021, 21, 3485. https://doi.org/10.3390/s21103485
Wang M, Chen X, Jin B, Lv P, Wang W, Shen Y. A Novel V2V Cooperative Collision Warning System Using UWB/DR for Intelligent Vehicles. Sensors. 2021; 21(10):3485. https://doi.org/10.3390/s21103485
Chicago/Turabian StyleWang, Mingyang, Xinbo Chen, Baobao Jin, Pengyuan Lv, Wei Wang, and Yong Shen. 2021. "A Novel V2V Cooperative Collision Warning System Using UWB/DR for Intelligent Vehicles" Sensors 21, no. 10: 3485. https://doi.org/10.3390/s21103485