Proprioceptive Estimation of Forces Using Underactuated Fingers for Robot-Initiated pHRI

 ,
,  ,
,  ,
,  ,
, <p>The proposed approach estimates the forces applied by a human in a frontal plane when the forearm is grasped by a robot (<b>a</b>) with an underactuated gripper using only the proprioceptive information from servos and passive joint angles (<b>b</b>).</p> "> Figure 2
<p>Kinematic design of the gripper for pHRI showing the parameters and joint angles. For clarity, every finger has been partially labeled.</p> "> Figure 3
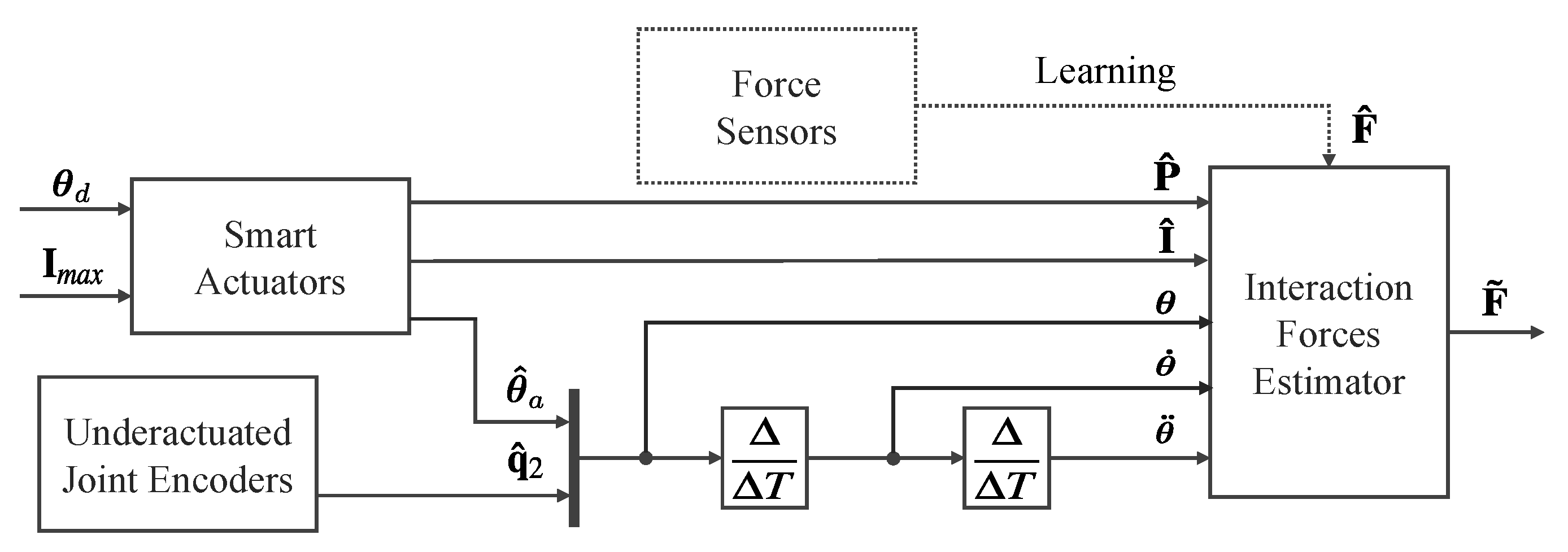
<p>Representative schematic of the intelligent perception system. The regression model uses the measurements from the proprioceptive sensors of the smart actuators and the underactuated joints to estimate external forces. The dotted line represents the supervised learning process, which uses ground-truth forces measured with force sensors for training.</p> "> Figure 4
<p>Illustration of the data collection process with the experimental force-sensing system (left side visible only) to record ground-truth data and gripper readings to train the regression methods. Please note that only three load cells (left finger) are visible in this picture as the other three (right finger) are hidden by the human forearm.</p> "> Figure 5
<p>Experimental setup (<b>a</b>) and calibration process for Y-axis (<b>b</b>) and X-axis (<b>c</b>) forces. A dummy forearm section is used to calibrate the force sensor used to get ground-truth values for the force estimation methods.</p> "> Figure 6
<p>Excerpt from the data collected during experiments: exerted forces (<math display="inline"><semantics> <msub> <mi>F</mi> <mi>x</mi> </msub> </semantics></math>, <math display="inline"><semantics> <msub> <mi>F</mi> <mi>y</mi> </msub> </semantics></math>) and the input parameters position (<math display="inline"><semantics> <msub> <mi>θ</mi> <mn>2</mn> </msub> </semantics></math>, <math display="inline"><semantics> <msub> <mi>θ</mi> <mi>a</mi> </msub> </semantics></math>), current (<span class="html-italic">I</span>), PWM (<span class="html-italic">P</span>), velocity (<math display="inline"><semantics> <msub> <mover accent="true"> <mi>θ</mi> <mo>˙</mo> </mover> <mn>2</mn> </msub> </semantics></math>, <math display="inline"><semantics> <msub> <mover accent="true"> <mi>θ</mi> <mo>˙</mo> </mover> <mi>a</mi> </msub> </semantics></math>), and acceleration (<math display="inline"><semantics> <msub> <mover accent="true"> <mi>θ</mi> <mo>¨</mo> </mover> <mn>2</mn> </msub> </semantics></math>, <math display="inline"><semantics> <msub> <mover accent="true"> <mi>θ</mi> <mo>¨</mo> </mover> <mi>a</mi> </msub> </semantics></math>), for left finger. Right finger data are analogous.</p> "> Figure 7
<p>Estimated vs. measured forces for two types of interaction experiments: (<b>a</b>) vertical and horizontal forces during 4 s, and (<b>b</b>) circular forces trying to describe a circle for 2.8 s.</p> "> Figure 8
<p>X (<b>left</b>) and Y (<b>right</b>) real Cartesian forces versus estimated forces using RFR (<b>top</b>) and SVR (<b>bottom</b>) methods.</p> ">
Abstract
:1. Introduction
2. The Underactuated Gripper
2.1. Design
2.2. Forward Kinematics
2.3. Dynamic Model
3. Force Estimation Method
4. Experimental Setup
5. Experimental Protocol and Results
5.1. Data Modelling
5.2. Performance Evaluation and Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Krishnaswamy, K.; Moorthy, S.; Oates, T. Survey Data Analysis for Repositioning, Transferring, and Personal Care Robots. In Proceedings of the International Conference on PErvasive Technologies Related to Assistive Environments (PETRA), Rhodes, Greece, 21–23 June 2017; pp. 45–51. [Google Scholar]
- Krishnan, R.H.; Pugazhenthi, S. Mobility assistive devices and self-transfer robotic systems for elderly, a review. Intell. Serv. Robot. 2014, 7, 37–49. [Google Scholar] [CrossRef]
- Nikolaidis, S.; Hsu, D.; Srinivasa, S. Human-robot mutual adaptation in collaborative tasks: Models and experiments. Int. J. Robot. Res. 2017, 36, 618–634. [Google Scholar] [CrossRef]
- ISO/TS 15066:2016. Robots and Robotic Devices—Collaborative Robots. Available online: https://www.iso.org/standard/62996.htm (accessed on 19 September 2019).
- Malm, T.; Viitaniemi, J.; Latokartano, J.; Lind, S.; Venho-Ahonen, O.; Schabel, J. Safety of Interactive Robotics—Learning from Accidents. Int. J. Soc. Robot. 2010, 2, 221–227. [Google Scholar] [CrossRef]
- Gandarias, J.M.; Wang, Y.; Stilli, A.; García-Cerezo, A.J.; Gómez-de-Gabriel, J.M.; Wurdemann, H.A. Open-loop position control in collaborative, modular Variable-Stiffness-Link (VSL) robots. IEEE Robot. Autom. Lett. 2020, 5, 1772–1779. [Google Scholar] [CrossRef]
- Stilli, A.; Cremoni, A.; Bianchi, M.; Ridolfi, A.; Gerii, F.; Vannetti, F.; Wurdemann, H.A.; Allotta, B.; Althoefer, K. AirExGlove—A novel pneumatic exoskeleton glove for adaptive hand rehabilitation in post-stroke patients. In Proceedings of the IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 579–584. [Google Scholar]
- Li, Z.; Huang, B.; Ye, Z.; Deng, M.; Yang, C. Physical Human–Robot Interaction of a Robotic Exoskeleton By Admittance Control. IEEE Trans. Ind. Electron. 2018, 65, 9614–9624. [Google Scholar] [CrossRef] [Green Version]
- Geethanjali, P. Myoelectric control of prosthetic hands: State-of-the-art review. Med Devices Evid. Res. 2016, 9, 247–255. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bowyer, S.A.; Baena, F.R. Dissipative control for physical human–robot interaction. IEEE Trans. Robot. 2015, 31, 1281–1293. [Google Scholar] [CrossRef]
- Stilli, A.; Grattarola, L.; Feldmann, H.; Wurdemann, H.A.; Althoefer, K. Variable Stiffness Link (VSL): Toward inherently safe robotic manipulators. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 4971–4976. [Google Scholar]
- Chow, K.; Kemp, C.C. Robotic repositioning of human limbs via model predictive control. In Proceedings of the IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), New York, NY, USA, 26–31 August 2016; pp. 473–480. [Google Scholar]
- Erickson, Z.; Clever, H.M.; Turk, G.; Liu, C.K.; Kemp, C.C. Deep haptic model predictive control for robot-assisted dressing. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 1–8. [Google Scholar]
- Gómez-de-Gabriel, J.M.; Gandarias, J.M.; Pérez-Maldonado, F.J.; García-Nunez, F.J.; Fernandez-Garcia, E.J.; Garcia-Cerezo, A.J. Methods for Autonomous Wristband Placement with a Search-and-Rescue Aerial Manipulator. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 7838–7844. [Google Scholar]
- Huang, Y.; Li, J.; Huang, Q.; Souères, P. Anthropomorphic robotic arm with integrated elastic joints for TCM remedial massage. Robotica 2015, 33, 348–365. [Google Scholar] [CrossRef] [Green Version]
- Kruse, D.; Radke, R.J.; Wen, J.T. Collaborative human-robot manipulation of highly deformable materials. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 3782–3787. [Google Scholar] [CrossRef]
- Wahrburg, A.; Bös, J.; Listmann, K.D.; Dai, F.; Matthias, B.; Ding, H. Motor-Current-Based Estimation of Cartesian Contact Forces and Torques for Robotic Manipulators and Its Application to Force Control. IEEE Trans. Autom. Sci. Eng. 2018, 15, 879–886. [Google Scholar] [CrossRef]
- Chawda, V.; Niemeyer, G. Toward torque control of a KUKA LBR IIWA for physical human-robot interaction. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 6387–6392. [Google Scholar] [CrossRef]
- Radó, J.; Dücső, C.; Földesy, P.; Szebényi, G.; Nawrat, Z.; Rohr, K.; Fürjes, P. 3D force sensors for laparoscopic surgery tool. Microsyst. Technol. 2018, 24, 519–525. [Google Scholar] [CrossRef]
- Guggenheim, J.W.; Jentoft, L.P.; Tenzer, Y.; Howe, R.D. Robust and Inexpensive Six-Axis Force–Torque Sensors Using MEMS Barometers. IEEE/ASME Trans. Mechatron. 2017, 22, 838–844. [Google Scholar] [CrossRef]
- Chen, S.; Wang, J.; Kazanzides, P. Integration of a Low-Cost Three-Axis Sensor for Robot Force Control. In Proceedings of the 2018 Second IEEE International Conference on Robotic Computing (IRC), Laguna Hills, CA, USA, 31 January–2 February 2018; pp. 246–249. [Google Scholar] [CrossRef]
- Yang, C.; Zeng, C.; Liang, P.; Li, Z.; Li, R.; Su, C.Y. Interface design of a physical human-robot interaction system for human impedance adaptive skill transfer. IEEE Trans. Autom. Sci. Eng. 2018, 15, 329–340. [Google Scholar] [CrossRef]
- Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft Robotic Grippers. Adv. Mater. 2018, 30, 1707035. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Choi, H.; Lee, S. Improving the performance of hand posture classification by perimeter sensor with sEMG. In Proceedings of the 2013 IEEE International Conference on Mechatronics and Automation, Takamatsu, Japan, 4–7 August 2013; pp. 819–824. [Google Scholar] [CrossRef]
- Larkin, D.Q.; Duindam, V. Arm with a Combined Force and Shape Sensor. U.S. Patent 10,105,188, 23 October 2018. [Google Scholar]
- Gómez-de Gabriel, J.; Harwin, W. Evaluation of sensor configurations for robotic surgical instruments. Sensors 2015, 15, 27341–27358. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gandarias, J.M.; Gómez-de Gabriel, J.M.; García-Cerezo, A.J. Enhancing Perception with Tactile Object Recognition in Adaptive Grippers for Human–Robot Interaction. Sensors 2018, 18, 692. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gandarias, J.M.; Pastor, F.; Muñoz-Ramírez, A.J.; García-Cerezo, A.J.; Gómez-de Gabriel, J.M. Underactuated Gripper with Forearm Roll Estimation for Human Limbs Manipulation in Rescue Robotics. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macao, China, 3–8 November 2019; pp. 5937–5942. [Google Scholar]
- Peternel, L.; Fang, C.; Tsagarakis, N.; Ajoudani, A. Online Human Muscle Force Estimation for Fatigue Management in Human-Robot Co-Manipulation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1340–1346. [Google Scholar]
- Liu, X.; Zhao, F.; Ge, S.S.; Wu, Y.; Mei, X. End-Effector Force Estimation for Flexible-Joint Robots With Global Friction Approximation Using Neural Networks. IEEE Trans. Ind. Inform. 2019, 15, 1730–1741. [Google Scholar] [CrossRef]
- Ma, R.R.; Odhner, L.U.; Dollar, A.M. A modular, open-source 3D printed underactuated hand. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 2737–2743. [Google Scholar]
- Jović, S.; Danesh, A.S.; Younesi, E.; Aničić, O.; Petković, D.; Shamshirband, S. Forecasting of underactuated robotic finger contact forces by support vector regression methodology. Int. J. Pattern Recognit. Artif. Intell. 2016, 30, 1659019. [Google Scholar] [CrossRef]
- Liaw, A.; Wiener, M. Classification and regression by randomForest. R News 2002, 2, 18–22. [Google Scholar]
- NASA. Std-3000. Man-Systems Integration Standards; NASA: Washington, DC, USA, 1995; Volume 3.
- Losey, D.P.; McDonald, C.G.; Battaglia, E.; O’Malley, M.K. A review of intent detection, arbitration, and communication aspects of shared control for physical human–robot interaction. Appl. Mech. Rev. 2018, 70, 010804. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Yu, H.; Li, K.; Dong, Q.; Huang, X. Study on Force Interaction System of Upper Limb Rehabilitation Robot. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2019; Volume 631, p. 032051. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| a | 40 mm | e | 27.8 mm |
| b | 20 mm | 90° | |
| c | 60 mm | 56° | |
| d | 25 mm | w | 10 mm |
| I | P | |||||||
|---|---|---|---|---|---|---|---|---|
| Force X | 1.0921 | 0.9185 | 1.3562 | 0.9050 | 0.8265 | 1.3502 | 0.7936 | 0.8949 |
| Force Y | 1.6341 | 0.7029 | 0.7296 | 0.9385 | 1.5958 | 0.8571 | 0.7358 | 0.7156 |
| Intent | Classification Accuracy/Estimation Error | |||
|---|---|---|---|---|
| Binary | 99.08% (Right) | 98.78% (Left) | ||
| Discrete | 96.34% (Right) | 97.69% (Up) | 94.03% (Left) | 95.87% (Down) |
| Continuous | 19.2 degrees () | 0.22 kgf () | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ballesteros, J.; Pastor, F.; Gómez-de-Gabriel, J.M.; Gandarias, J.M.; García-Cerezo, A.J.; Urdiales, C. Proprioceptive Estimation of Forces Using Underactuated Fingers for Robot-Initiated pHRI. Sensors 2020, 20, 2863. https://doi.org/10.3390/s20102863
Ballesteros J, Pastor F, Gómez-de-Gabriel JM, Gandarias JM, García-Cerezo AJ, Urdiales C. Proprioceptive Estimation of Forces Using Underactuated Fingers for Robot-Initiated pHRI. Sensors. 2020; 20(10):2863. https://doi.org/10.3390/s20102863
Chicago/Turabian StyleBallesteros, Joaquin, Francisco Pastor, Jesús M. Gómez-de-Gabriel, Juan M. Gandarias, Alfonso J. García-Cerezo, and Cristina Urdiales. 2020. "Proprioceptive Estimation of Forces Using Underactuated Fingers for Robot-Initiated pHRI" Sensors 20, no. 10: 2863. https://doi.org/10.3390/s20102863