
Dynamic Data Filtering of Long-Range Doppler LiDAR Wind Speed Measurements


"> Figure 1
<p>Example of a staring mode LiDAR measurement in the <math display="inline"> <semantics> <mrow> <msub> <mi>u</mi> <mi>r</mi> </msub> <mo>‒</mo> <mi>α</mi> </mrow> </semantics> </math> diagram for a duration of 30 min in distances in the range of 361 m to 2911 m. (<b>a</b>) Blue points represent single measurements points, the red horizontal line indicates the lower CNR-threshold of −24 dB. (<b>b</b>) Visualisation of data density of measurement point distribution. Colours indicate different values of frequency distribution.</p> "> Figure 2
<p>Visualisation of segmentation of the overall filtering time interval <math display="inline"> <semantics> <mrow> <mi mathvariant="sans-serif">Δ</mi> <mi>T</mi> </mrow> </semantics> </math> in normalisation intervals <math display="inline"> <semantics> <mrow> <mi mathvariant="sans-serif">Δ</mi> <mi>t</mi> </mrow> </semantics> </math>.</p> "> Figure 3
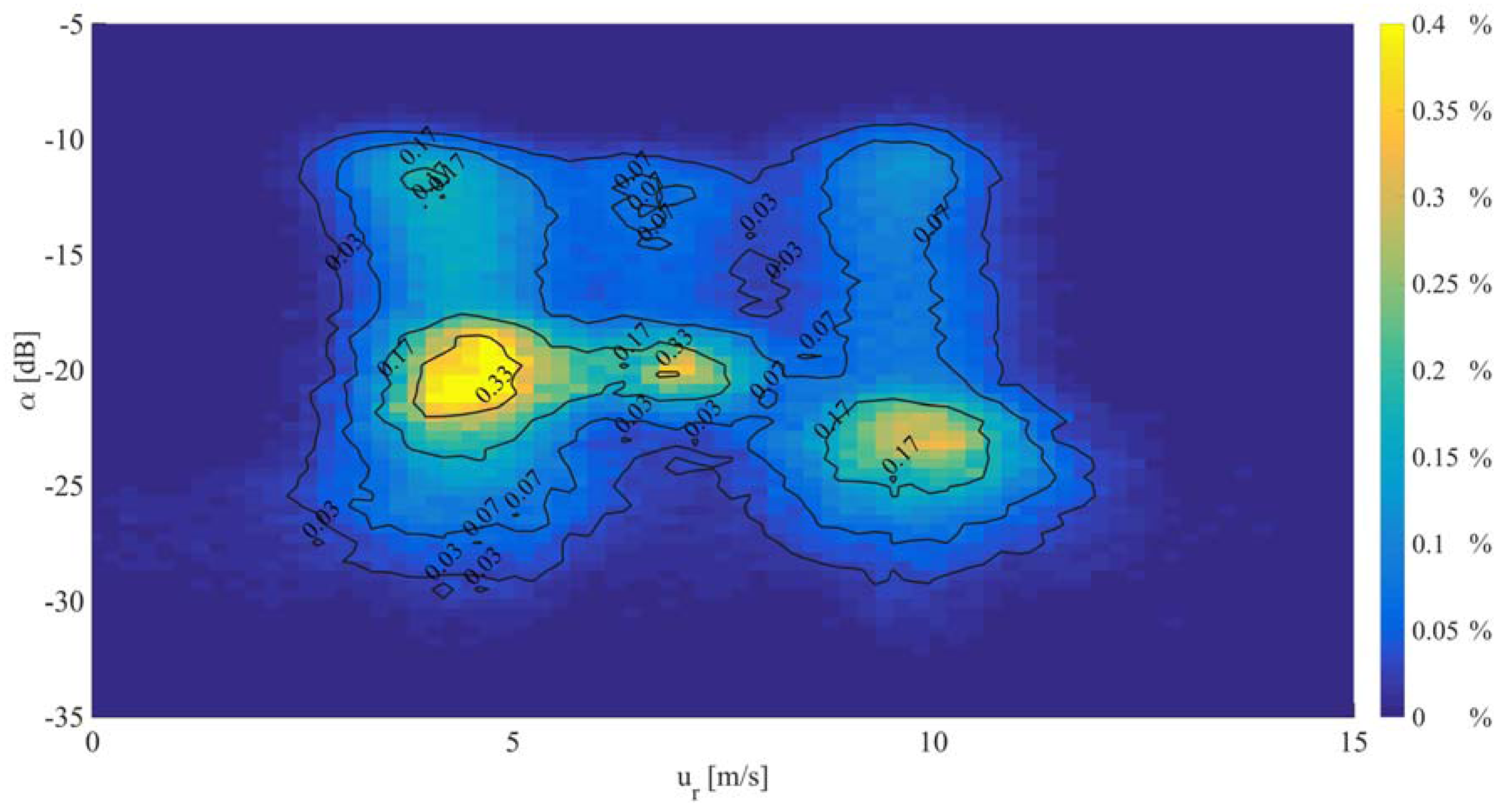
<p>Example of data-density distribution of a 30-min time interval of LiDAR staring mode measurements in the original <math display="inline"> <semantics> <mrow> <msub> <mi>u</mi> <mi>r</mi> </msub> <mo>‒</mo> <mi>α</mi> </mrow> </semantics> </math> frames of reference. Iso-lines show levels of probability of occurrence of the measurement with in a bin of 0.32 m/s width and 0.2 dB height.</p> "> Figure 4
<p>Visualisation of different normalisation times <math display="inline"> <semantics> <mrow> <mi mathvariant="sans-serif">Δ</mi> <mi>t</mi> </mrow> </semantics> </math> of the LiDAR data distribution in the normalised frame of reference (<b>a</b>) <math display="inline"> <semantics> <mrow> <mi mathvariant="sans-serif">Δ</mi> <mi>t</mi> <mo>=</mo> <mn>0.5</mn> <mtext> </mtext> <mi mathvariant="normal">s</mi> <mo>,</mo> </mrow> </semantics> </math> (<b>b</b>) <math display="inline"> <semantics> <mrow> <mi mathvariant="sans-serif">Δ</mi> <mi>t</mi> <mo>=</mo> <mn>1</mn> <mtext> </mtext> <mi mathvariant="normal">s</mi> <mo>,</mo> </mrow> </semantics> </math> (<b>c</b>) <math display="inline"> <semantics> <mrow> <mi mathvariant="sans-serif">Δ</mi> <mi>t</mi> <mo>=</mo> <mn>5</mn> <mtext> </mtext> <mi mathvariant="normal">s</mi> <mo>,</mo> </mrow> </semantics> </math> (<b>d</b>) <math display="inline"> <semantics> <mrow> <mi mathvariant="sans-serif">Δ</mi> <mi>t</mi> <mo>=</mo> <mn>15</mn> <mtext> </mtext> <mi mathvariant="normal">s</mi> <mo>,</mo> </mrow> </semantics> </math> (<b>e</b>) <math display="inline"> <semantics> <mrow> <mi mathvariant="sans-serif">Δ</mi> <mi>t</mi> <mo>=</mo> <mn>30</mn> <mtext> </mtext> <mi mathvariant="normal">s</mi> <mo>,</mo> </mrow> </semantics> </math> (<b>f</b>) <math display="inline"> <semantics> <mrow> <mi mathvariant="sans-serif">Δ</mi> <mi>t</mi> <mo>=</mo> <mn>60</mn> <mtext> </mtext> <mi mathvariant="normal">s</mi> <mo>,</mo> </mrow> </semantics> </math> (<b>g</b>) <math display="inline"> <semantics> <mrow> <mi mathvariant="sans-serif">Δ</mi> <mi>t</mi> <mo>=</mo> <mn>120</mn> <mtext> </mtext> <mi mathvariant="normal">s</mi> <mo>,</mo> </mrow> </semantics> </math> (<b>h</b>) <math display="inline"> <semantics> <mrow> <mi mathvariant="sans-serif">Δ</mi> <mi>t</mi> <mo>=</mo> <mn>300</mn> <mtext> </mtext> <mi mathvariant="normal">s</mi> <mo>,</mo> </mrow> </semantics> </math> (<b>i</b>) <math display="inline"> <semantics> <mrow> <mi mathvariant="sans-serif">Δ</mi> <mi>t</mi> <mo>=</mo> <mn>600</mn> <mtext> </mtext> <mi mathvariant="normal">s</mi> </mrow> </semantics> </math>.</p> "> Figure 5
<p>Behaviour of parametrisation of fitted bi-variate Gaussian distribution of data density in relation to the different normalisation time intervals <math display="inline"> <semantics> <mrow> <mi mathvariant="sans-serif">Δ</mi> <mi>t</mi> </mrow> </semantics> </math>. The <math display="inline"> <semantics> <mi>α</mi> </semantics> </math>-axis fitted standard deviation is shown in turquoise, <math display="inline"> <semantics> <mrow> <msub> <mi>u</mi> <mi>r</mi> </msub> </mrow> </semantics> </math>-axis fitted standard deviation in dark blue, the maximum probability of occurrence in green and the residual of the original and the fitted data distribution.</p> "> Figure 6
<p>Layout of the wind farm “alpha ventus” with measurement geometry of staring mode LiDAR with an azimuthal orientation of 306.47° and an elevation of 0.2° (red). Crosses represent wind turbines, the circle the platform FINO1 and the square the substation AV0. The measurement positions are indicated by the red line.</p> "> Figure 7
<p>Visualisation of the line-of-sight velocity turbulence intensity in dependency of the wind direction measured by the ultrasonic anemometer from 21.12.2013 15:35 h (UTC) till 19.01.2014 7:55 h (UTC). Gaps in the plot visualise unavailability of anemometer data. Individual 10 min mean values are shown in light blue whereas the binned averaged is marked in dark blue. Black vertical dashed lines indicate the wind direction of possible wake shading of the anemometer on FINO1 based on geometrical correlations. The red line shows the perpendicular wind direction to the azimuthal orientation of the laser beam.</p> "> Figure 8
<p>Histogram of 10 min averaged ultrasonic anemometer inflow conditions from 21.12.2013 15:35 h (UTC) till 19.01.2014 7:55 h (UTC) (<b>a</b>) horizontal wind speed in the meteorological reference frame is marked in dark blue, whereas the LiDAR laser beam projected wind speed <math display="inline"> <semantics> <mrow> <msub> <mi>u</mi> <mrow> <mi>l</mi> <mi>r</mi> <mi>f</mi> </mrow> </msub> </mrow> </semantics> </math> (Equation (17)) is shown in green. The bin width is 1 m/s, (<b>b</b>) wind direction with a bin width of 3°.</p> "> Figure 9
<p>Time series of the 10 min averaged wind direction measured by the ultrasonic anemometer from 21.12.2013 15:35 h (UTC) till 19.01.2014 7:55 h (UTC). Gaps in the plot demonstrate unavailability of LiDAR data. Horizontal lines indicate the wind direction of possible wake shading of the anemometer on FINO1 based on geometrical correlations.</p> "> Figure 10
<p>Data availability of staring mode measurements for different filter methods. (<b>a</b>) time dependent behaviour for range at 2864 m and (<b>b</b>) averaged data availability over all ranges. The dashed line marks the distance of the anemometer at FINO1.</p> "> Figure 11
<p>Absolute error of staring mode measurements in dependency of data availability. Markers represent 10 min values of (<b>a</b>) the velocity error and (<b>b</b>) the velocity standard deviation.</p> "> Figure 12
<p>Behaviour of the 10 min averaged filtered staring mode measurements of (<b>a</b>) the projected wind speed over time; (<b>b</b>) the standard deviation over time; (<b>c</b>) average wind speed error over wind direction; (<b>d</b>) average standard deviation error over wind direction. Vertical dashed lines indicate the wind direction of possible wake shading of the anemometer on FINO1 based on geometrical correlations.</p> "> Figure 13
<p>Behaviour of the 10 min averaged filtered staring mode measurements of (<b>a</b>) the projected wind speed over time, (<b>b</b>) the standard deviation over time, (<b>c</b>) average wind speed error over time, (<b>d</b>) standard deviation error over time.</p> "> Figure 14
<p>Histogram in double logarithmic scaling with exponential increasing bin width of the (<b>a</b>) absolute average velocity error and (<b>b</b>) the absolute velocity standard deviation error. Vertical dashed lines indicate the centre of a fitted Gaussian curve.</p> "> Figure 15
<p>Influence of maximum error threshold to the resulting error (<b>a</b>) RMS velocity error over velocity error threshold and (<b>b</b>) RMS velocity standard deviation error over velocity standard deviation error threshold.</p> "> Figure 16
<p>Influence of different filtering methods on a 10 min averaged horizontal LiDAR scans. (<b>1st column</b>) radial speed, (<b>2nd column</b>) CNR mapping, (<b>3rd column</b>) standard deviation of radial speed. (<b>a</b>–<b>c</b>) histogram-based dynamic data filter, (<b>d</b>–<b>f</b>) Gaussian kernel based dynamic data filter, (<b>g</b>–<b>i</b>) CNR-threshold filter, (<b>j</b>–<b>l</b>) combined filter approach by Wang et al. (<b>m</b>–<b>o</b>) combined filter approach by Newman et al. (<b>p</b>–<b>r</b>) unfiltered.</p> "> Figure 17
<p>Results of application of different filtering methods in the <math display="inline"> <semantics> <mrow> <msub> <mi>u</mi> <mi>r</mi> </msub> <mo>‒</mo> <mi>α</mi> </mrow> </semantics> </math> diagram. (<b>a</b>) histogram-based dynamic data filter, (<b>b</b>) Gaussian kernel based dynamic data filter, (<b>c</b>) CNR-threshold filter, (<b>d</b>) two sigma standard deviation filter, (<b>e</b>) iterative standard deviation filter, (<b>f</b>) interquartile-range, (<b>g</b>) combined filter approach by Wang et al. (<b>h</b>) combined filter approach by Newman et al. (<b>i</b>) no filtering.</p> "> Figure 17 Cont.
<p>Results of application of different filtering methods in the <math display="inline"> <semantics> <mrow> <msub> <mi>u</mi> <mi>r</mi> </msub> <mo>‒</mo> <mi>α</mi> </mrow> </semantics> </math> diagram. (<b>a</b>) histogram-based dynamic data filter, (<b>b</b>) Gaussian kernel based dynamic data filter, (<b>c</b>) CNR-threshold filter, (<b>d</b>) two sigma standard deviation filter, (<b>e</b>) iterative standard deviation filter, (<b>f</b>) interquartile-range, (<b>g</b>) combined filter approach by Wang et al. (<b>h</b>) combined filter approach by Newman et al. (<b>i</b>) no filtering.</p> "> Figure 18
<p>Visualisation of the data density distribution of Stream Line XR PPI data from 31.10.2016 00:00 h (UTC) till 31.10.2016 00:30 h (UTC) in (<b>a</b>) <math display="inline"> <semantics> <mrow> <msub> <mi>u</mi> <mi>r</mi> </msub> <mo>‒</mo> <mi>α</mi> </mrow> </semantics> </math> diagram and (<b>b</b>) in the normalised reference frame.</p> "> Figure 19
<p>Visualisation of the influence of the normalisation time <math display="inline"> <semantics> <mrow> <mi mathvariant="sans-serif">Δ</mi> <mi>t</mi> </mrow> </semantics> </math> and validity value <math display="inline"> <semantics> <mi>ν</mi> </semantics> </math> on the resulting total error. Staring mode LiDAR data from 21.12.2013 15:35 h (UTC) till 19.01.2014 7:55 h (UTC) form the basis for this calculation. (<b>a</b>) Average velocity error, (<b>b</b>) the average velocity standard deviation error, (<b>c</b>) RMS velocity error and (<b>d</b>) RMS velocity standard deviation error.</p> "> Figure 20
<p>Visualisation of the influence of the normalisation time <math display="inline"> <semantics> <mrow> <mi mathvariant="sans-serif">Δ</mi> <mi>t</mi> </mrow> </semantics> </math> and the averaging time <math display="inline"> <semantics> <mrow> <mi mathvariant="sans-serif">Δ</mi> <mi>T</mi> </mrow> </semantics> </math> on the resulting error of staring mode LiDAR data from 04.01.2014 7:30 h (UTC) till 05.01.2014 7:30 h (UTC) from the histogram-based dynamic data filter (<b>a</b>) Average velocity error; (<b>b</b>) average velocity standard deviation error; (<b>c</b>) RMS velocity error and (<b>d</b>) RMS velocity standard deviation error.</p> "> Figure 21
<p>Visualisation of the influence of the normalisation time <math display="inline"> <semantics> <mrow> <mi mathvariant="sans-serif">Δ</mi> <mi>t</mi> </mrow> </semantics> </math> and the averaging time <math display="inline"> <semantics> <mrow> <mi mathvariant="sans-serif">Δ</mi> <mi>T</mi> </mrow> </semantics> </math> on the resulting error of staring mode LiDAR data from 04.01.2014 7:30 h (UTC) till 05.01.2014 7:30 h (UTC) from the Gaussian kernel based dynamic data filter. (<b>a</b>) Average velocity error, (<b>b</b>) average velocity standard deviation error, (<b>c</b>) RMS velocity error and (<b>d</b>) RMS velocity standard deviation error.</p> "> Figure 21 Cont.
<p>Visualisation of the influence of the normalisation time <math display="inline"> <semantics> <mrow> <mi mathvariant="sans-serif">Δ</mi> <mi>t</mi> </mrow> </semantics> </math> and the averaging time <math display="inline"> <semantics> <mrow> <mi mathvariant="sans-serif">Δ</mi> <mi>T</mi> </mrow> </semantics> </math> on the resulting error of staring mode LiDAR data from 04.01.2014 7:30 h (UTC) till 05.01.2014 7:30 h (UTC) from the Gaussian kernel based dynamic data filter. (<b>a</b>) Average velocity error, (<b>b</b>) average velocity standard deviation error, (<b>c</b>) RMS velocity error and (<b>d</b>) RMS velocity standard deviation error.</p> "> Figure 22
<p>Averaged and normalised error behaviour of the average velocity error, the RMS velocity error, the velocity standard deviation error and the RMS velocity standard deviation error of (a) the histogram-based dynamic data filter and (b) the Gaussian kernel based dynamic data filter. Staring mode LiDAR data from 04.01.2014 7:30 h (UTC) till 05.01.2014 7:30 h (UTC) form the basis for this calculation.</p> "> Figure 23
<p>Visualisation of the influence of the averaging time <math display="inline"> <semantics> <mrow> <mi mathvariant="sans-serif">Δ</mi> <mi>T</mi> </mrow> </semantics> </math> for all filters to the resulting errors. (<b>a</b>) Average velocity error, (<b>b</b>) average velocity standard deviation error, (<b>c</b>) RMS velocity error and (<b>d</b>) RMS velocity standard deviation error.</p> ">
Abstract
:
1. Introduction
2. Methodology
2.1. Threshold Filter
2.2. Static Standard Deviation Filter
2.3. Iterative Standard Deviation Filter
2.4. Interquartile-Range Filter
2.5. Combined Filter—Newman
2.6. Combined Filter—Wang
2.7. Dynamic Data Filtering
2.7.1. Normalisation
2.7.2. Histogram-Based Data-Density
- The lower threshold value represents the lower percentage limit from which iso-lines will be calculated.
- The upper threshold can be seen as the reference shape that is based on the contour shape of the corresponding percentage density value.
2.7.3. 2D-Gaussian Kernel Data-Density
3. Measurement Setups
3.1. Offshore Ground-Based Comparative Measurement Campaign
3.1.1. LiDAR Measurements
3.1.2. Ultrasonic Anemometer Measurements
3.1.3. Onshore Nacelle-Based Wake Measurements
4. Results
4.1. Evaluation of Filtering Based on Staring Measurements
4.1.1. Data Availability
4.1.2. Comparison of LiDAR and Anemometer Velocity Measurements
4.1.3. Error Analysis
4.2. Evaluation Based on Scanning Measurements
5. Conclusions
Acknowledgements
Author Contributions
Conflicts of Interest
Abbreviations
| LiDAR | Light detection and ranging |
| ABL | Atmospheric boundary layer |
| LOS | Line-of-sight velocity |
| CNR | Carrier-to-noise-ratio |
| SNR | Signal-to-noise-ratio |
| HDDR | High data-density region |
| PPI | Plan-Position-Indicator |
| RHI | Range-Height-Indicator |
| PRF | Pulse Repetition Frequency |
| FWHM | Full Width at Half Maximum |
| RMS | Root-mean-square |
| Avg | Average |
| Std | Standard deviation |
| Abs | Absolute |
Appendix A. Infuence of the Normalization Time on the Validity

Appendix B. Influence of the Averaging and Normalization Time on the Error





Appendix C. Comparison of Waked and Free Inflow

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Avg. Availability FINO1 | Avg. Availability All Ranges | Abs. Avg. Velocity Error | RMS Velocity Error | Abs. Avg. Velocity Std. Dev. Error | RMS Velocity Std. Dev. Error | |
|---|---|---|---|---|---|---|
| Dyn. data histogram | 89.9% | 91.6% | 0.50 m/s | 3.13 m/s | 0.21 m/s | 2.14 m/s |
| Dyn. data Gauss. kernel | 63.6% | 68.5% | 0.47 m/s | 2.91 m/s | 0.19 m/s | 1.10 m/s |
| CNR threshold | 76.1% | 83.5% | 0.75 m/s | 4.10 m/s | 0.50 m/s | 2.68 m/s |
| Std. dev. two sigma | 96.6% | 96.3% | 0.73 m/s | 3.28 m/s | 1.04 m/s | 3.50 m/s |
| Iterative std. dev. | 97.1% | 97.5% | 0.77 m/s | 3.26 m/s | 1.02 m/s | 4.03 m/s |
| Quartile filter | 92.5% | 93.3% | 0.61 m/s | 3.17m/s | 0.53 m/s | 3.28 m/s |
| Combined Wang | 72.1% | 79.3% | 0.68 m/s | 4.24 m/s | 0.05 m/s | 2.24 m/s |
| Combined Newman | 76.0% | 83.4% | 0.70 m/s | 4.10 m/s | 0.29 m/s | 2.56 m/s |
| No filter | 100% | 100% | 1.13 m/s | 3.31 m/s | 3.14 m/s | 4.87 m/s |
| Avg. Availability FINO1 | Avg. Availability All Ranges | Abs. Avg. Velocity Error | RMS Velocity Error | Abs. Avg. Velocity Std. Dev. Error | RMS Velocity Std. Dev. Error | |
|---|---|---|---|---|---|---|
| Dyn. data histogram | 89.3% | 90.1% | 0.07 m/s | 0.81 m/s | 0.04 m/s | 1.26 m/s |
| Dyn. data Gauss. kernel | 70.9% | 72.6% | 0.02 m/s | 0.91 m/s | 0.18 m/s | 0.63 m/s |
| CNR threshold | 89.3% | 92.8% | 0.13 m/s | 0.90 m/s | 0.17 m/s | 1.43 m/s |
| Std. dev. two sigma | 96.1% | 96.0% | 0.24 m/s | 1.32 m/s | 0.32 m/s | 2.11 m/s |
| Iterative std. dev. | 99.2% | 99.4% | 0.28 m/s | 1.39 m/s | 0.45 m/s | 2.48 m/s |
| Quartile filter | 94.3% | 94.6% | 0.18 m/s | 1.21 m/s | 0.09 m/s | 1.86 m/s |
| Combined Wang | 84.5% | 87.8% | 0.08 m/s | 0.80 m/s | 0.10 m/s | 1.06 m/s |
| Combined Newman | 89.2% | 92.7% | 0.11 m/s | 0.88 m/s | 0.05 m/s | 1.31 m/s |
| No filter | 100% | 100% | 0.38 m/s | 1.44 m/s | 1.03 m/s | 2.87 m/s |
References
- Grund, C.J.; Banta, R.M.; George, J.L.; Howell, J.N.; Post, M.J.; Richter, R.A.; Weickmann, A.M. High-resolution Doppler LiDAR for boundary-layer and cloud research. J. Atmos. Ocean. Technol. 2001, 18, 376–393. [Google Scholar] [CrossRef]
- Smith, D.A.; Harris, M.; Coffey, A.S.; Mikkelsen, T.; Jørgensen, H.E.; Mann, J.; Danielian, R. Wind LiDAR evaluation at the Danish wind test site in Høvsøre. Wind Energy 2006, 9, 87–93. [Google Scholar] [CrossRef]
- Käsler, Y.; Rahm, S.; Simmet, R.; Kühn, M. Wake measurements of a multi-MW wind turbine with coherent long-range pulsed Doppler wind LiDAR. J. Atmos. Ocean. Technol. 2010, 27, 1529–1532. [Google Scholar] [CrossRef]
- Lang, S.; Mckeogh, E. LIDAR and SODAR Measurements of Wind Speed and Direction in Upland Terrain for Wind Energy Purposes. Remote Sens. 2011, 3, 1871–1901. [Google Scholar] [CrossRef]
- Trujillo, J.J.; Bingöl, F.; Larsen, G.C.; Mann, J.; Kühn, M. Light detection and ranging measurements of wake dynamics. Part II: Two-dimensional scanning. Wind Energy 2011, 14, 61–75. [Google Scholar] [CrossRef]
- Trabucchi, D.; Trujillo, J.J.; Schneemann, J.; Bitter, M.; Kühn, M. Application of staring LiDARs to study the dynamics of wind turbine wakes. Met. Z. 2015, 6, 557–564. [Google Scholar] [CrossRef]
- Goyer, G.G.; Watson, R. The Laser and its Application to Meteorology. Bull. Am. Meteorol. Soc. 1963, 44, 564–575. [Google Scholar]
- Vickers, D.; Mahrt, L. Quality control and flux sampling problems for tower and aircraft data. J. Atmos. Ocean. Technol. 1997, 14, 512–526. [Google Scholar] [CrossRef]
- Frehlich, R. Effects of wind turbulence on coherent Doppler LiDAR performance. J. Atmos. Ocean. Techol. 1997, 14, 54–75. [Google Scholar] [CrossRef]
- Pal, S.; Haeffelin, M.; Batchvarova, E. Exploring a geophysical process-based attribution technique for the determination of the atmospheric boundary layer depth using aerosol LiDAR and near-surface meteorological measurements. J. Geophys. Res. Atmos. 2013, 118, 9277–9295. [Google Scholar] [CrossRef]
- Pal, S.; Lee, T.R.; Phelps, S.; De Wekker, S.F.J. Impact of atmospheric boundary layer depth variability and wind reversal on the diurnal variability of aerosol concentration at a valley site. Sci. Total. Environ. 2014. [Google Scholar] [CrossRef] [PubMed]
- Hill, M.; Calhoun, R.; Fernando, H.J.S. Coplanar Doppler LiDAR Retrieval of Rotors from T-REX. AMETSOC JAS 2010, 67, 713–729. [Google Scholar] [CrossRef]
- Krishnamurthy, R.; Choukulkar, A.; Calhoun, R.; Fine, J.; Oliver, A.; Barr, K.S. Coherent Doppler LiDAR for wind farm characterization. Wind Energy 2013, 16, 189–206. [Google Scholar] [CrossRef]
- Newsom, R.K.; Berg, L.K.; Shaw, W.J.; Fischer, M.L. Turbine-scale wind field measurements using dual-Doppler LiDAR. Wind Energy 2015, 18, 219–235. [Google Scholar] [CrossRef]
- Gryning, S.-E.; Floors, R.; Peña, A.; Batchvarova, E.; Brümmer, B. Weibull Wind-Speed Distribution Parameters Derived from a Combination of Wind-LiDAR and Tall-Mast Measurements Over Land, Coastal and Marine Sites. Bound.-Layer Meteorol. 2016, 159, 329–348. [Google Scholar] [CrossRef]
- Newman, J.F.; Klein, P.M.; Wharton, S.; Sathe, A.; Bonin, T.A.; Chilson, P.B.; Muschinski, A. Evaluation of three LiDAR scanning strategies for turbulence measurements. Atmos. Meas. Tech. 2016, 9, 1993–2013. [Google Scholar] [CrossRef]
- Wang, H.; Barthelmie, R.; Clifton, A.; Pryor, S.C. Wind Measurements from Arc Scans with Doppler Wind LiDAR. J. Atmos. Ocean. Technol. 2015, 32, 2024–2040. [Google Scholar] [CrossRef]
- Meyer Forsting, A.R.; Troldborg, N. A finite difference approach to despiking in-stationary velocity data—Tested on a triple-LiDAR. J. Phys. IOP Conf. Ser. 2016, 753, 072017. [Google Scholar] [CrossRef]
- Højstrup, J. A statistical data screening procedure. Meas. Sci. Technol. 1993, 4, 153–157. [Google Scholar] [CrossRef]
- Hoaglin, D.C.; Mosteller, F.; Tukey, J.W. Wiley Series in Probability and Mathematical Statistics. In Understanding Robust and Exploratory Data Analysis; Wiley: Hoboken, NJ, USA, 1983; Volume 84, p. 447. [Google Scholar]
- Botev, Z.I.; Grotowski, J.F.; Kroese, D.P. Kernel density estimation via diffusion. Ann. Stat. 2010, 38, 2916–2957. [Google Scholar] [CrossRef]
- Scott, D.W. On optimal and data-based histograms. Biometrika 1979, 66, 605–610. [Google Scholar] [CrossRef]
- Morales, A.; Wächter, M.; Peinke, J. Characterization of wind turbulence by higher-order statistics. Wind Energy 2011, 15, 391–406. [Google Scholar] [CrossRef]
- Shapiro, S.S.; Wilk, M.B. An analysis of variance test for normality. Biometrika 1965, 52, 591. [Google Scholar] [CrossRef]
- Bastine, D.; Wächter, M.; Peinke, J.; Trabucchi, D.; Kühn, M. Characterizing Wake Turbulence with Staring LiDAR Measurements. J. Phys. IOP Conf. Ser. 2015, 625. [Google Scholar] [CrossRef]
- Schmidt, M.; Trujillo, J.J.; Kühn, M. Orientation correction of wind direction measurements by means of staring LiDAR. J. Phys. IOP Conf. Ser. 2016, 749. [Google Scholar] [CrossRef]
- Westerhellweg, A.; Neumann, T.; Riedel, V. FINO1 Mast Correction. 2012 DEWI Magazin 60–66. Available online: http://www.dewi.de/dewi_res/fileadmin/pdf/publications/Magazin_40/09.pdf (accessed on 9 December 2016).
- Sathe, A.; Mann, J. A review of turbulence measurements using ground-based wind LiDARs. Atmos. Meas. Tech. 2013, 6, 3147–3167. [Google Scholar] [CrossRef]
- Sathe, A.; Mann, J.; Gottschall, J.; Courtney, M.S. Can wind LiDARs measure turbulence? J. Atmos. Ocean. Technol. 2011, 28, 853–868. [Google Scholar] [CrossRef]
- Schneemann, J.; Trabucchi, D.; Trujillo, J.J.; Kühn, M. Comparing measurements of horizontal wind speed of a 2D Multi-LiDAR and a cup anemometer. J. Phys. Conf. Ser. 2012. [Google Scholar] [CrossRef]
- Klaas, T.; Pauscher, L.; Callies, D. LiDAR-mast deviations in complex terrain and their simulation using CFD. Meteorol. Z. 2015, 24, 591–603. [Google Scholar] [CrossRef]
- Pauscher, L.; Vasiljevic, N.; Callies, D.; Lea, G.; Mann, J.; Klaas, T.; Hieronimus, J.; Gottschall, J.; Schwesig, A.; Kühn, M.; Courtney, M. An Inter-Comparison Study of Multi- and DBS LiDAR Measurements in Complex Terrain. Remote Sens. 2016, 8, 782. [Google Scholar] [CrossRef]
- Peña, A.; Mann, J.; Dimitrov, N. Turbulence characterization from a forward-looking nacelle LiDAR. Wind Energy Sci. 2016. [Google Scholar] [CrossRef]
- Boquet, M.; Royer, P.; Cariou, J.-P.; Matcha, M. Simulations of Doppler LiDAR Measurements Range and Data Availability. J. Atmos. Ocean. Technol. 2016. [CrossRef]



















| Avg. Availability FINO1 | Avg. Availability All Ranges | Abs. Avg. Velocity Error | RMS Velocity Error | Abs. Avg. Velocity Std. Dev. Error | RMS Velocity Std. Dev. Error | |
|---|---|---|---|---|---|---|
| Dyn. data histogram | 90.0% | 90.4% | 0.34 m/s | 2.38 m/s | 0.14 m/s | 1.82 m/s |
| Dyn. data Gauss. kernel | 75.1% | 78.2% | 0.30 m/s | 2.10 m/s | 0.18 m/s | 0.90 m/s |
| CNR threshold | 81.9% | 87.6% | 0.45 m/s | 3.02 m/s | 0.36 m/s | 2.24 m/s |
| Std. dev. two sigma | 96.2% | 95.9% | 0.49 m/s | 2.50 m/s | 0.73 m/s | 3.00 m/s |
| Iterative std. dev. | 98.1% | 98.5% | 0.54 m/s | 2.54 m/s | 0.79 m/s | 3.45 m/s |
| Quartile filter | 93.5% | 94.0% | 0.40 m/s | 2.42 m/s | 0.35 m/s | 2.77 m/s |
| Combined Wang | 77.5% | 83.0% | 0.40 m/s | 3.10 m/s | 0.00 m/s | 1.87 m/s |
| Combined Newman | 81.8% | 87.5% | 0.42 m/s | 3.02 m/s | 0.20 m/s | 2.14 m/s |
| No filter | 100% | 100% | 0.76 m/s | 2.58 m/s | 2.17 m/s | 4.10 m/s |
| Dyn. Data Hist. | Dyn. Data Gauss. | CNR Thres-hold | Std. Dev. | Iter. Std | Quartile | Wang | Newman | Unfiltered | |
|---|---|---|---|---|---|---|---|---|---|
| Velocity | |||||||||
| Reg. slope | 0.92 | 0.95 | 0.96 | 0.92 | 0.91 | 0.93 | 0.97 | 0.97 | 0.86 |
| Offset [m/s] | 0.31 | 0.26 | 0.22 | 0.33 | 0.32 | 0.32 | 0.22 | 0.22 | 0.44 |
| R2 | 0.85 | 0.84 | 0.90 | 0.83 | 0.79 | 0.85 | 0.90 | 0.90 | 0.78 |
| Velocity std. dev. | |||||||||
| Reg. slope | 1.50 | 1.39 | 0.73 | 1.27 | 1.05 | 0.86 | 0.50 | 0.62 | 3.04 |
| Offset [m/s] | 0.42 | 0.33 | 0.63 | 0.45 | 0.74 | 0.49 | 0.50 | 0.58 | 0.08 |
| R2 | 0.06 | 0.04 | 0.02 | 0.04 | 0.02 | 0.02 | 0.01 | 0.01 | 0.15 |
| Dyn. Data Hist. | Dyn. Data Gauss. | CNR Thres-hold | Std. Dev. | Iter. Std | Quartile | Wang | Newman | Unfiltered | |
|---|---|---|---|---|---|---|---|---|---|
| Velocity [m/s] | 0.09 | 0.20 | 0.09 | 0.09 | 0.09 | 0.10 | 0.11 | 0.09 | 0.11 |
| Vel. std. dev. [m/s] | 0.09 | 0.12 | 0.06 | 0.12 | 0.06 | 0.10 | 0.11 | 0.06 | 0.07 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Beck, H.; Kühn, M. Dynamic Data Filtering of Long-Range Doppler LiDAR Wind Speed Measurements. Remote Sens. 2017, 9, 561. https://doi.org/10.3390/rs9060561
Beck H, Kühn M. Dynamic Data Filtering of Long-Range Doppler LiDAR Wind Speed Measurements. Remote Sensing. 2017; 9(6):561. https://doi.org/10.3390/rs9060561
Chicago/Turabian StyleBeck, Hauke, and Martin Kühn. 2017. "Dynamic Data Filtering of Long-Range Doppler LiDAR Wind Speed Measurements" Remote Sensing 9, no. 6: 561. https://doi.org/10.3390/rs9060561
APA StyleBeck, H., & Kühn, M. (2017). Dynamic Data Filtering of Long-Range Doppler LiDAR Wind Speed Measurements. Remote Sensing, 9(6), 561. https://doi.org/10.3390/rs9060561