
Discrete Anisotropic Radiative Transfer (DART 5) for Modeling Airborne and Satellite Spectroradiometer and LIDAR Acquisitions of Natural and Urban Landscapes

 , ,
, ,  ,
, "> Figure 1
<p>DART cell matrix of the Earth/Atmosphere system. The atmosphere has three vertical levels: upper (<span class="html-italic">i.e</span>., just layers), mid (<span class="html-italic">i.e</span>., cells of any size) and lower atmosphere (<span class="html-italic">i.e.</span>, same cell size as the land surface). Land surface elements are simulated as the juxtaposition of facets and turbid cells.</p> "> Figure 2
<p>Examples of natural and artificial 3D objects imported by DART, simulated using triangular facets: (<b>a</b>) wheat plant, (<b>b</b>) corn plant, (<b>c</b>) rice canopy, (<b>d</b>) sunflower plant, (<b>e</b>) cherry tree and (<b>f</b>) airplane.</p> "> Figure 3
<p><span class="html-italic">Scheme illustrating DART model architecture:</span> four processing modules (Direction, Phase, Maket, Dart) and input data (landscape, sensor, atmosphere) are controlled through a GUI or pre-programmed scripts. The Sequence module can launch multiple DART simulations simultaneously on multiple processor cores producing effectively several RT products.</p> "> Figure 4
<p>Simulation of a flat infinite repetitive landscape.</p> "> Figure 5
<p>Five stages of the DART algorithm that models RT of the Earth-atmosphere system.</p> "> Figure 6
<p>Facet scattering. (<b>a</b>) Single facet with an incident flux W<sub>inc</sub>(Ω<sub>s</sub>). It produces reflection W<sub>refl</sub>(Ω<sub>n</sub>) and direct W<sub>trans,dir</sub>(Ω<sub>s</sub>) and diffuse W<sub>trans,dif</sub>(Ω<sub>m</sub>) transmission. (<b>b</b>) Interaction of two facets in cell with 27 sub-cells (only nine are illustrated in 2D figure). Each facet has a single scattering point per sub-cell, with an intercepted radiation per incident angular sector.</p> "> Figure 7
<p>Turbid cell volume scattering: (<b>a</b>) two 1st order interception points per incident ray with associated first order scattered rays, and their second order interception points (red), (<b>b</b>) analytically computed within-cell second order scattering, and (<b>c</b>) first order interception points, which are grouped per incident angular sector and per cell sub-face crossed by the incident rays. Rays exiting the cell are grouped per exiting cell sub-face and per discrete direction.</p> "> Figure 8
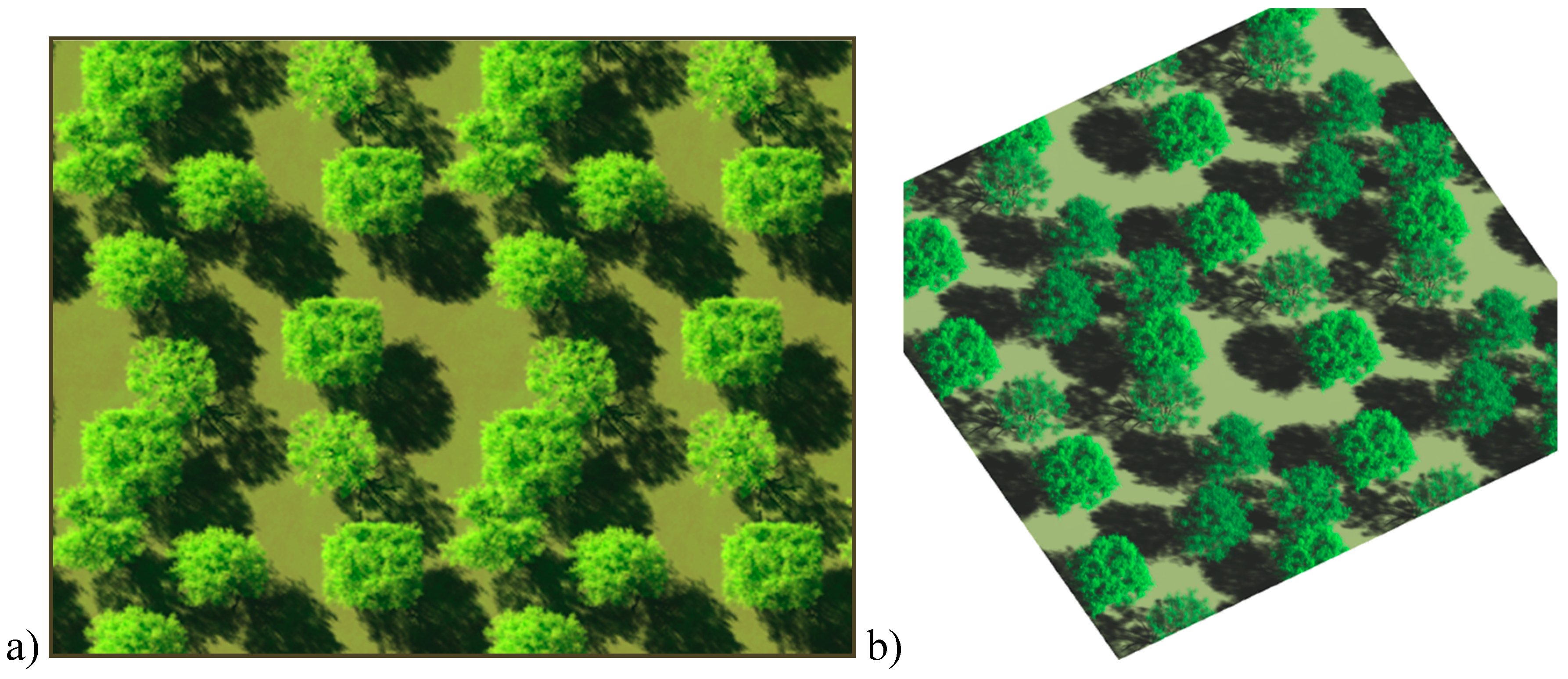
<p>DART simulated RGB composite of satellite image in natural colors for a virtual tree formation displayed in: (<b>a</b>) nadir, and (<b>b</b>) oblique view.</p> "> Figure 9
<p>DART simulated BOA (<b>a</b>), atmosphere (<b>b</b>) and TOA (<b>c</b>) radiance (W/m<sup>2</sup>/sr/µm) at 443 nm, for 6 h 44 m (<b>left</b>), 8 h 44 m (<b>middle</b>) and 10 h 44 m (<b>right</b>) UTC as measured by a geostationary satellite at Latitude 0° N, Longitude 17° E and 36,000 km altitude on 21 June 2012.</p> "> Figure 9 Cont.
<p>DART simulated BOA (<b>a</b>), atmosphere (<b>b</b>) and TOA (<b>c</b>) radiance (W/m<sup>2</sup>/sr/µm) at 443 nm, for 6 h 44 m (<b>left</b>), 8 h 44 m (<b>middle</b>) and 10 h 44 m (<b>right</b>) UTC as measured by a geostationary satellite at Latitude 0° N, Longitude 17° E and 36,000 km altitude on 21 June 2012.</p> "> Figure 10
<p>Spatial variability of the useful radiance L<sub>u,<span class="html-small-caps">toa</span></sub> of a sandy desert dune (25.5° N, 30.4° E, altitude of 78 m), acquired by a future geostationary satellite (0° N, 17° E, altitude of 36,000 km) at 665 nm on 21 June 2012. (<b>a</b>) DART simulated radiance image of a barchan dune at solar noon. (<b>b</b>) Hourly standard deviation of L<sub>u,<span class="html-small-caps">toa</span></sub> for spatial resolution from 1 m up to 100 m. Sand reflectance was obtained from the ASTER spectral library.</p> "> Figure 11
<p>The LIDAR geometry configuration, with horizontal ground surface.</p> "> Figure 12
<p>The Ray-Carlo approach for LIDAR simulation, depicted with all several scattering orders.</p> "> Figure 13
<p>A virtual tree built out of geometrical facets (<b>a</b>) and the same turbid-cell tree derived by the facet-to-turbid conversion tool (<b>b</b>) with their 3D LIDAR point clouds for an oblique view (θ = 30°, φ= 135°) and the 1D waveform with its first scattering order contribution (<b>c</b>). The image of photons that reached the ground is showing the last LIDAR echo (<b>d</b>) and DART ray tracking provides a high spatial resolution (10 cm) nadir image at λ = 1064 nm.</p> "> Figure 14
<p>DART simulated photon counting LIDAR with solar noise. (<b>a</b>) Bare ground and vegetation plot with an oblique sun irradiation (θ<sub>s</sub> = 45°) and a horizontal LIDAR sensor path. (<b>b</b>) Radiance image of the scene (<span class="html-italic">i.e.</span>, solar noise). (<b>c</b>) Simulated photon counting signal. (<b>d</b>) An enlarged subset of simulated scene (<b>c</b>).</p> "> Figure 15
<p>DART simulated products of the St. Sernin Basilica (Toulouse, France). (<b>a</b>) Airborne camera image (RGB color composite in natural colors) with the projective projection. (<b>b</b>) Satellite image with the orthographic projection. (<b>c</b>) Airborne LIDAR scanner simulation, displayed with SPDlib software.</p> "> Figure 16
<p>The changing hotspot perception simulated for the Jarvselja birth forest stand (Estonia) in summer: (<b>a</b>) DART simulated BRF for three spectral bands (442 nm, 551 nm, 661 nm), with SKYL equal to 0.21, 0.15 and 0.12, respectively, and DART simulated images for an airborne scanner flown at three altitudes: (<b>b</b>) 0.2 km, (<b>c</b>) 2 km and (<b>d</b>) 5 km, with ground resolution of 0.5 m. Dark zones in (<b>c</b>) and (d) correspond with occurrences of few pine trees in the birch stand.</p> "> Figure 16 Cont.
<p>The changing hotspot perception simulated for the Jarvselja birth forest stand (Estonia) in summer: (<b>a</b>) DART simulated BRF for three spectral bands (442 nm, 551 nm, 661 nm), with SKYL equal to 0.21, 0.15 and 0.12, respectively, and DART simulated images for an airborne scanner flown at three altitudes: (<b>b</b>) 0.2 km, (<b>c</b>) 2 km and (<b>d</b>) 5 km, with ground resolution of 0.5 m. Dark zones in (<b>c</b>) and (d) correspond with occurrences of few pine trees in the birch stand.</p> "> Figure 17
<p>Schematic representation of the DART procedure that simulates orthorectified RS images: an ideal orthorectification with orthographic (<b>a</b>) and perspective projection (<b>b</b>), respectively, and an industry orthorectification (<b>c</b>) with either perspective or orthographic projection.</p> "> Figure 18
<p>DART simulated orthorectified satellite images of the Jarvselja birth forest stand (Estonia) in summer obtained with ideal (<b>a</b>) and industry (<b>b</b>) orthorectification (bright tones indicate zones invisible to the sensor, due to the DSM opacity), accompanied by a scatterplot (<b>c</b>) displaying linear regression between per-pixel reflectance values of both orthorectified images.</p> "> Figure 19
<p>DART fusion of LIDAR and spectral images of St Sernin Basilica (Toulouse, France). (<b>a</b>) Acquisition geometry. (<b>b</b>) Multi-pulse LIDAR image. (<b>c</b>) RGB composition of corresponding spectral image. (<b>d</b>) and (<b>e</b>) Products of LIDAR-spectral fusion for two opposite viewing directions.</p> ">
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Background
- (1)
- The date of acquisition (sun angular position),
- (2)
- Landscape geometrical configuration and optical properties
- (3)
- Atmospheric parameters (gas and aerosol density profiles, scattering phase functions and single scattering albedo).
1.1. Semi-Empirical Models
1.2. Geometric Optical Reflectance Models
1.3. Radiative Transfer Models
2. DART Theoretical Background and Functions



- -
- Calculation of foliar reflectance and transmittance properties with the PROSPECT leaf RT model [16], using leaf biochemical properties (i.e., total chlorophyll content, carotenoid content, equivalent water thickness and leaf mass per area) and leaf mesophyll structural parameter.
- -
- Computation of scene spectra and broadband image data (reflectance, temperature brightness, and radiance), using a sensor specific spectral response function for either a single DART simulation with N spectral bands, or for a sequence of N single spectral band simulations.
- -
- Importation of raster land cover maps for creating 3D landscapes that contain land cover units, possibly with 3D turbid media as vegetation or fluid (air pollution, low altitude cloud cover, etc.).
- -
- Importation or creation of Digital Elevation Models (DEM). DEMs can be created as a raster re-sampled to the DART spatial resolution or imported either from external raster image file or as a triangulated irregular network (TIN) object.
- -
- Automatic initiation of a sequence of Q simulations with the Sequence module. Any parameter (LAI, spectral band, date, etc.) A1, …, Am can take N1, …, Nm values, respectively, with any variable grouping (). Outcomes are stored in a Look-Up Table (LUT) database for further display and analysis. It is worth noting that a single ray tracking simulation with N bands is much faster than the corresponding N mono-band simulations (e.g., 50 times faster if N > 103).
- -
- The simulated 3D radiative budget can be extracted and displayed over any modeled 3D object and also as images of vertical and horizontal layers of a given 3D scene.
- -
- The transformation from facets to turbid medium objects converts 3D plant objects (trees) composed of many facets (> 106) into a turbid vegetation medium that keeps the original 3D foliage density and LAD distribution. This method remediates constraints limiting RT simulations with many vegetation objects (e.g., forest) that lead to too large computational times and computer memory requirements.
- -
- The creation of 3D objects by using volumes with pre-defined shapes that can be filled with various 3D objects (triangles, discs, etc.). This functionality allows a quick test of simple hypotheses, as for instance the influence of vegetation leaf shape and size in turbid media simulations.
- -
- -
- Display tools for visualization and quick analysis of spectral images and LIDAR waveform and photon counting outputs, etc.
3. Ray Tracking Approach for Modeling Spectroradiometer Acquisitions

- -
- Stage 1 is tracking the sun radiation and the atmosphere thermal emission through the atmosphere. It calculates radiance transfer functions per cell and per discrete direction from the mid/high atmosphere interlayer to the sensor, TOA and BOA levels. This stage gives the downward BOA radiance Lboa(Ω↓), upward TOA radiance Ltoa(Ω↑) and also upward Lsensor(Ω↑) and downward Lsensor(Ω↓) radiance at sensor altitude.
- -
- Stage 2 is tracking within the landscape the downward BOA radiance Lboa(Ω↓), originating from the stage 1, and the landscape thermal emission. This stage provides the landscape radiation budget, albedo, and upward BOA radiance Lboa(Ω↑), before the Earth-atmosphere radiative coupling.
- -
- Stage 3 is tracking the BOA upward radiance Lboa(Ω↑), obtained during stage 2, through the atmosphere back to the landscape. Radiance transfer functions of stage 3 provide the downward BOA radiance Lboa(Ω↓), which is extrapolated in order to consider the multiple successive Earth-atmosphere interactions.
- -
- Stage 4 is tracking downward BOA radiance Lboa(Ω↓), resulting from stage 3, within the landscape. It uses a single iteration with an extrapolation for considering all scattering orders within the Earth scene. This stage results in landscape radiation budget and upward BOA radiance Lboa(Ω↑).
- -
- Stage 5 applies the stage 3 radiance transfer functions to the upward BOA radiance of stage 4. The resulting radiance is added to the atmosphere radiance, which is calculated within the first stage, to produce the radiance at sensor (Lsensor(Ω↑)) and TOA (Ltoa(Ω↑)) levels.
- (1)
- Images at three altitude levels: BOA, TOA and anywhere between BOA and TOA. They can be camera and/or scanner images with projective and/or orthographic projection, as well as ortho-projected images that allow superimposing the landscape map and images simulated for various viewing directions.
- (2)
- 3D radiative budget: distribution of radiation that is intercepted, absorbed, scattered and thermally emitted. It is useful for studying the energy budget and functioning of natural and urban surfaces.

3.1. Surface Interactions with Facets

3.2. Volume Interactions within Turbid Vegetation and Fluid Cells





4. Modeling LIDAR Signal with Ray-Carlo and Box Methods

4.1. Ray-Carlo: Photon Tracing Method

4.2. Box Method: Selection of Photon Scattering Directions


5. Modeling IS Data with the Perspective Projection
- (1)
- Orthographic projection with parallel rays to the sensor plane: Sm',xy = Sm,xy, resulting in .
- (2)
- Perspective projection of a pin-hole camera: , resulting in W*(M') = W*(M).
- (3)
- Combined projection of a scanner: orthographic projection for the axis parallel to the sensor path, and perspective for the other axis. Thus, resulting in .



- -
- Orthographic projection (Figure 17a): radiance of pixel (i,j) is , with the surface normal vector, (Ωn, ΔΩn) the sensor viewing direction (i.e., DART discrete direction) and k the index of cells above pixel (i,j), and
- -
- Perspective projection (Figure 17b): radiance of pixel (i, j) is , with (ωi,j,k, Δωi,j,k) being the sensor viewing direction for cell (i,j,k) above pixel (i,j).


6. Fusion of DART Simulated Imaging Spectroscopy and LIDAR Data

7. Conclusions
- (1)
- Modeling of satellite and aircraft LIDAR waveform and photon counting signals using the specifically designed Box and Ray-Carlo methods.
- (2)
- Image simulation of spectroradiometers mounted on aircraft or unmanned aerial vehicles in the perspective projection. This simulation is useful to bridge the scaling gap between in situ radiometric measurements and satellite observations. The possibility to model LIDAR and spectral image data of the same landscape is highly appealing for RS data fusion techniques.
- (3)
- Simulation of data acquired by an IS aboard a geostationary satellite, for any Earth region, and at any date from sunrise to sunset.
- (1)
- Orthorectification based on digital elevation model in addition to surface model.
- (2)
- Modeling spectral measurements of a sensor within the Earth landscape. Consequently, it will be possible to simulate camera acquisitions that are used to assess the LAI of trees and crops.
- (3)
- Simulation of airborne acquisition according to the actual platform trajectory. This is essential for a pixel-wise comparison with real airborne and satellite images.
- (4)
- Simulation of landscapes with cells of variable dimensions within the same scene for decreasing computational time and computer storage requirements. It will be possible to simulate larger scenes.
- (5)
- RT modeling of water bodies. This modeling relies on 3D distribution of the so-called fluid turbid cells. This new feature is expected to open DART to the scientific community of ocean and inland water remote sensing.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Rouse, J., Jr.; Haas, R.; Schell, J.; Deering, D. Monitoring Vegetation Systems in the Great Plains with ERTS; Technical Presentations; NASA SP-351; NASA: Washington, DC, USA, 1974. [Google Scholar]
- Roujean, J.L.; Leroy, M.; Deschamps, P.Y. A bidirectional reflectance model of the Earth’s surface for the correction of remote sensing data. J. Geophys. Res.: Atmos. 1992, 97, 20455–20468. [Google Scholar] [CrossRef]
- Wanner, W.; Li, X.; Strahler, A. On the derivation of kernels for kernel‐driven models of bidirectional reflectance. J. Geophys. Res.: Atmos. 1995, 100, 21077–21089. [Google Scholar] [CrossRef]
- Liu, S.; Liu, Q.; Liu, Q.; Wen, J.; Li, X. The angular and spectral kernel model for BRDF and albedo retrieval. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2010, 3, 241–256. [Google Scholar] [CrossRef]
- You, D.; Wen, J.; Liu, Q.; Tang, Y. The angular and spectral kernel-driven model: Assessment and application. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 1331–1345. [Google Scholar] [CrossRef]
- Rahman, H.; Pinty, B.; Verstraete, M.M. Coupled surface‐atmosphere reflectance (CSAR) model: 2. Semiempirical surface model usable with NOAA advanced very high resolution radiometer data. J. Geophys. Res.: Atmos. 1993, 98, 20791–20801. [Google Scholar] [CrossRef]
- Martonchik, J.V. Determination of aerosol optical depth and land surface directional reflectances using multiangle imagery. J. Geophys. Res.: Atmos. 1997, 102, 17015–17022. [Google Scholar] [CrossRef]
- Engelsen, O.; Pinty, B.; Verstraete, M.; Martonchik, J. Parametric Bidirectional Reflectance Factor Models: Evaluation, Improvements and Applications; Technical Report No. EUR 16426 EN; EC Joint Research Centre: Ispra, Italy, 1996. [Google Scholar]
- Peddle, D.R.; Franklin, S.E.; Johnson, R.L.; Lavigne, M.B.; Wulder, M.A. Structural change detection in a disturbed conifer forest using a geometric optical reflectance model in multiple-forward mode. IEEE Trans. Geosci. Remote Sens. 2003, 41, 163–166. [Google Scholar] [CrossRef]
- Li, X.; Strahler, A.H. Geometric-optical bidirectional reflectance modeling of the discrete crown vegetation canopy: Effect of crown shape and mutual shadowing. IEEE Trans. Geosci. Remote Sens. 1992, 30, 276–292. [Google Scholar] [CrossRef]
- Chen, J.M.; Leblanc, S.G. A four-scale bidirectional reflectance model based on canopy architecture. IEEE Trans. Geosci. Remote Sens. 1997, 35, 1316–1337. [Google Scholar] [CrossRef]
- Chen, J.M.; Leblanc, S.G. Multiple-scattering scheme useful for geometric optical modeling. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1061–1071. [Google Scholar] [CrossRef]
- Leblanc, S.G.; Chen, J.M. A windows graphic user interface (GUI) for the five‐scale model for fast BRDF simulations. Remote Sens. Rev. 2000, 19, 293–305. [Google Scholar] [CrossRef]
- Dawson, T.P.; Curran, P.J.; Plummer, S.E. LIBERTY—Modeling the effects of leaf biochemical concentration on reflectance spectra. Remote Sens. Environ. 1998, 65, 50–60. [Google Scholar] [CrossRef]
- Hapke, B. Bidirectional reflectance spectroscopy: 1. Theory. J. Geophys. Res.: Solid Earth 1981, 86, 3039–3054. [Google Scholar] [CrossRef]
- Feret, J.-B.; François, C.; Asner, G.P.; Gitelson, A.A.; Martin, R.E.; Bidel, L.P.; Ustin, S.L.; Le Maire, G.; Jacquemoud, S. PROSPECT-4 and 5: Advances in the leaf optical properties model separating photosynthetic pigments. Remote Sens. Environ. 2008, 112, 3030–3043. [Google Scholar] [CrossRef]
- Verhoef, W. Light scattering by leaf layers with application to canopy reflectance modeling: The SAIL model. Remote Sens. Environ. 1984, 16, 125–141. [Google Scholar] [CrossRef]
- Berk, A. MODTRAN Band Model Transmittance. Available online: www.spectral.com/pdf/MODTRAN4_Multiple_Scattering.pdf (accessed on 16 November 2014).
- Vermote, E.F.; Tanré, D.; Deuze, J.-L.; Herman, M.; Morcette, J.-J. Second simulation of the satellite signal in the solar spectrum, 6S: An overview. IEEE Trans. Geosci. Remote Sens. 1997, 35, 675–686. [Google Scholar] [CrossRef]
- Gastellu-Etchegorry, J.-P.; Demarez, V.; Pinel, V.; Zagolski, F. Modeling radiative transfer in heterogeneous 3D vegetation canopies. Remote Sens. Environ. 1996, 58, 131–156. [Google Scholar] [CrossRef]
- Yin, T.; Gastellu-Etchegorry, J.-P.; Lauret, N.; Grau, E.; Rubio, J. A new approach of direction discretization and oversampling for 3D anisotropic radiative transfer modeling. Remote Sens. Environ. 2013, 135, 213–223. [Google Scholar] [CrossRef]
- Borel, C.C.; Gerstl, S.A.; Powers, B.J. The radiosity method in optical remote sensing of structured 3-D surfaces. Remote Sens. Environ. 1991, 36, 13–44. [Google Scholar] [CrossRef]
- Min, Q. A polarized radiative transfer model based on successive order of scattering. Adv. Atmos. Sci. 2010, 27, 891–900. [Google Scholar] [CrossRef]
- Disney, M.; Lewis, P.; North, P. Monte Carlo ray tracing in optical canopy reflectance modelling. Remote Sens. Rev. 2000, 18, 163–196. [Google Scholar] [CrossRef]
- Lewis, P. Three-dimensional plant modelling for remote sensing simulation studies using the Botanical Plant Modelling System. Agronomie 1999, 19, 185–210. [Google Scholar] [CrossRef]
- North, P. Three-dimensional forest light interaction model using a Monte Carlo method. IEEE Trans. Geosci. Remote Sens. 1996, 34, 946–956. [Google Scholar] [CrossRef]
- Govaerts, Y.M.; Verstraete, M.M. Raytran: A Monte Carlo ray-tracing model to compute light scattering in three-dimensional heterogeneous media. IEEE Trans. Geosci. Remote Sens. 1998, 36, 493–505. [Google Scholar] [CrossRef]
- Kimes, D.; Kirchner, J. Radiative transfer model for heterogeneous 3-D scenes. Appl. Opt. 1982, 21, 4119–4129. [Google Scholar] [CrossRef] [PubMed]
- Myneni, R.; Asrar, G.; Hall, F. A three-dimensional radiative transfer method for optical remote sensing of vegetated land surfaces. Remote Sens. Environ. 1992, 41, 105–121. [Google Scholar] [CrossRef]
- Gastellu-Etchegorry, J.; Martin, E.; Gascon, F. DART: A 3D model for simulating satellite images and studying surface radiation budget. Int. J. Remote Sens. 2004, 25, 73–96. [Google Scholar] [CrossRef]
- Gastellu-Etchegorry, J. 3D modeling of satellite spectral images, radiation budget and energy budget of urban landscapes. Meteorol. Atmos. Phys. 2008, 102, 187–207. [Google Scholar] [CrossRef] [Green Version]
- Gastellu-Etchegorry, J.; Guillevic, P.; Zagolski, F.; Demarez, V.; Trichon, V.; Deering, D.; Leroy, M. Modeling BRF and radiation regime of boreal and tropical forests: I. BRF. Remote Sens. Environ. 1999, 68, 281–316. [Google Scholar] [CrossRef]
- Thompson, R.; Goel, N.S. Two models for rapidly calculating bidirectional reflectance: Photon spread (PS) model and statistical photon spread (SPS) model. Remote Sens. Rev. 1998, 16, 157–207. [Google Scholar] [CrossRef]
- Pinty, B.; Gobron, N.; Widlowski, J.L.; Gerstl, S.A.; Verstraete, M.M.; Antunes, M.; Bacour, C.; Gascon, F.; Gastellu, J.P.; Goel, N. Radiation transfer model intercomparison (RAMI) exercise. J. Geophys. Res.: Atmos. 2001, 106, 11937–11956. [Google Scholar] [CrossRef]
- Pinty, B.; Widlowski, J.L.; Taberner, M.; Gobron, N.; Verstraete, M.; Disney, M.; Gascon, F.; Gastellu, J.P.; Jiang, L.; Kuusk, A. Radiation Transfer Model Intercomparison (RAMI) exercise: Results from the second phase. J. Geophys. Res.: Atmos. 2004, 109. [Google Scholar] [CrossRef]
- Widlowski, J.L.; Taberner, M.; Pinty, B.; Bruniquel‐Pinel, V.; Disney, M.; Fernandes, R.; Gastellu‐Etchegorry, J.P.; Gobron, N.; Kuusk, A.; Lavergne, T. Third Radiation Transfer Model Intercomparison (RAMI) exercise: Documenting progress in canopy reflectance models. J. Geophys. Res.: Atmos. 2007, 112. [Google Scholar] [CrossRef] [Green Version]
- Widlowski, J.-L.; Robustelli, M.; Disney, M.; Gastellu-Etchegorry, J.-P.; Lavergne, T.; Lewis, P.; North, P.; Pinty, B.; Thompson, R.; Verstraete, M. The RAMI On-line Model Checker (ROMC): A web-based benchmarking facility for canopy reflectance models. Remote Sens. Environ. 2008, 112, 1144–1150. [Google Scholar] [CrossRef] [Green Version]
- Widlowski, J.L.; Pinty, B.; Lopatka, M.; Atzberger, C.; Buzica, D.; Chelle, M.; Disney, M.; Gastellu‐Etchegorry, J.P.; Gerboles, M.; Gobron, N. The fourth radiation transfer model intercomparison (RAMI‐IV): Proficiency testing of canopy reflectance models with ISO‐13528. J. Geophys. Res.: Atmos. 2013, 118, 6869–6890. [Google Scholar] [CrossRef]
- Gascon, F.; Gastellu-Etchegorry, J.-P.; Lefevre-Fonollosa, M.-J.; Dufrene, E. Retrieval of forest biophysical variables by inverting a 3-D radiative transfer model and using high and very high resolution imagery. Int. J. Remote Sens. 2004, 25, 5601–5616. [Google Scholar] [CrossRef]
- Banskota, A.; Wynne, R.H.; Thomas, V.A.; Serbin, S.P.; Kayastha, N.; Gastellu-Etchegorry, J.P.; Townsend, P.A. Investigating the utility of wavelet transforms for inverting a 3-D radiative transfer model using hyperspectral data to retrieve forest LAI. Remote Sens. 2013, 5, 2639–2659. [Google Scholar] [CrossRef]
- Durrieu, S.; Cherchali, S.; Costeraste, J.; Mondin, L.; Debise, H.; Chazette, P.; Dauzat, J.; Gastellu-Etchegorry, J.-P.; Baghdadi, N.; Pélissier, R. Preliminary Studies for a Vegetation Ladar/Lidar Space Mission in France. In Proceedings of 2013 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Melbourne, Australia, 21–26 July 2013.
- Bruniquel-Pinel, V.; Gastellu-Etchegorry, J. Sensitivity of texture of high resolution images of forest to biophysical and acquisition parameters. Remote Sens. Environ. 1998, 65, 61–85. [Google Scholar] [CrossRef]
- Guillevic, P.; Gastellu-Etchegorry, J. Modeling BRF and radiation regime of boreal and tropical forest: II. PAR regime. Remote Sens. Environ. 1999, 68, 317–340. [Google Scholar] [CrossRef]
- Malenovský, Z.; Martin, E.; Homolová, L.; Gastellu-Etchegorry, J.-P.; Zurita-Milla, R.; Schaepman, M.E.; Pokorný, R.; Clevers, J.G.; Cudlín, P. Influence of woody elements of a Norway spruce canopy on nadir reflectance simulated by the DART model at very high spatial resolution. Remote Sens. Environ. 2008, 112, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Malenovský, Z.; Homolová, L.; Zurita-Milla, R.; Lukeš, P.; Kaplan, V.; Hanuš, J.; Gastellu-Etchegorry, J.-P.; Schaepman, M.E. Retrieval of spruce leaf chlorophyll content from airborne image data using continuum removal and radiative transfer. Remote Sens. Environ. 2013, 131, 85–102. [Google Scholar] [CrossRef]
- Barbier, N.; Couteron, P.; Proisy, C.; Malhi, Y.; Gastellu‐Etchegorry, J.P. The variation of apparent crown size and canopy heterogeneity across lowland Amazonian forests. Glob. Ecol. Biogeogr. 2010, 19, 72–84. [Google Scholar] [CrossRef]
- Barbier, N.; Couteron, P.; Gastelly-Etchegorry, J.-P.; Proisy, C. Linking canopy images to forest structural parameters: Potential of a modeling framework. Ann. Forest Sci. 2012, 69, 305–311. [Google Scholar] [CrossRef] [Green Version]
- Proisy, C.; Barbier, N.; Guéroult, M.; Pélissier, R.; Gastellu-Etchegorry, J.-P.; Grau, E.; Couteron, P. Biomass Prediction in Tropical Forests: The Canopy Grain Approach. Available online: http://hal.ird.fr/ird-00658600/document (accessed on 16 November 2014).
- Gascon, F.; Gastellu-Etchegorry, J.-P.; Lefèvre, M.-J. Radiative transfer model for simulating high-resolution satellite images. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1922–1926. [Google Scholar] [CrossRef]
- Grau, E.; Gastellu-Etchegorry, J.-P. Radiative transfer modeling in the Earth-Atmosphere system with DART model. Remote Sens. Environ. 2013, 139, 149–170. [Google Scholar] [CrossRef]
- Nilson, T.; Kuusk, A. A reflectance model for the homogeneous plant canopy and its inversion. Remote Sens. Environ. 1989, 27, 157–167. [Google Scholar] [CrossRef]
- Etude des Couverts Forestiers par Inversion de Formes d’onde LIDAR à L’aide du Modèle de Transfert Radiatif DART Développé par le CESBIO. INSA de Strasbourg. 2010. Available online: http://eprints2.insa-strasbourg.fr/645/ (accessed on 16 November 2014).
- Yin, T.; Gastellu-Etchegorry, J.-P.; Grau, E.; Lauret, N.; Rubio, J. Simulating satellite waveform Lidar with DART model. In Proceedings of Geoscience and Remote Sensing Symposium (IGARSS), 2013 IEEE International, Melbourne, Australia, 21–26 July 2013.
- Gastellu-Etchegorry, J.-P.; Yin, T.; Grau, E.; Lauret, N.; Rubio, J. Lidar radiative transfer modeling in the Atmosphere. In Proceedings of Geoscience and Remote Sensing Symposium (IGARSS), 2013 IEEE International, Melbourne, Australia, 21–26 July 2013.
- Bunting, P.; Armston, J.; Lucas, R.M.; Clewley, D. Sorted Pulse Data (SPD) Library. Part I: A generic file format for LiDAR data from pulsed laser systems in terrestrial environments. Comput. Geosci. 2013, 56, 197–206. [Google Scholar] [CrossRef]
- Bunting, P.; Armston, J.; Clewley, D.; Lucas, R.M. Sorted pulse data (SPD) library—Part II: A processing framework for LiDAR data from pulsed laser systems in terrestrial environments. Comput. Geosci. 2013, 56, 207–215. [Google Scholar] [CrossRef]
- Martin, E. Dart: Modèle 3D Multispectral et Inversion D’images Optique De Satellite—Application Aux Couverts Forestiers. Available online: https://tel.archives-ouvertes.fr/tel-00139368/document (accessed on 16 November 2014).
- Grau, E. Modélisation DART du transfert Radiatif Terre-Atmosphère pour Simuler les Bilans Radiatif, Images de Télédétection et Mesures LIDAR des Paysages Terrestres. Available online: https://tel.archives-ouvertes.fr/tel-00841795/document (accessed on 16 November 2014).
- Gastellu-Etchegorry, J.-P.; Grau, E.; Lauret, N. DART: A 3D model for remote sensing images and radiative budget of earth surfaces. Available online: https://hal.archives-ouvertes.fr/ird-00658284/document (accessed on 16 November 2014).
- Hancock, S.; Disney, M.; Muller, P.L.J.-P. Exploring the Measurement of Forests with Full Waveform LIDAR through Monte-Carlo Ray Tracing. Available online: http://isprsserv.ifp.uni-stuttgart.de/proceedings/XXXVII/congress/1_pdf/38.pdf (accessed on 16 November 2014).
- North, P.; Rosette, J.; Suárez, J.; Los, S. A Monte Carlo radiative transfer model of satellite waveform LiDAR. Int. J. Remote Sens. 2010, 31, 1343–1358. [Google Scholar] [CrossRef]
- Schutz, B.; Zwally, H.; Shuman, C.; Hancock, D.; DiMarzio, J. Overview of the ICESat mission. Geophys. Res. Lett. 2005, 32. [Google Scholar] [CrossRef]
- Côté, J.-F.; Fournier, R.A.; Egli, R. An architectural model of trees to estimate forest structural attributes using terrestrial LiDAR. Environ. Modell. Softw. 2011, 26, 761–777. [Google Scholar] [CrossRef]
- Abdalati, W.; Zwally, H.J.; Bindschadler, R.; Csatho, B.; Farrell, S.L.; Fricker, H.A.; Harding, D.; Kwok, R.; Lefsky, M.; Markus, T. The ICESat-2 Laser Altimetry Mission. Available online: http://icesat.gsfc.nasa.gov/icesat2/publications/pubs_2010/abdalati_et_al_2010.pdf (accessed on 16 November 2014).
- Yin, T.; Lauret, N.; Gastellu-Etchegorry, J.-P. Simulation of multi-angle sensor image of the Earth scene by combining 3D radiative transfer modeling with perspective projection. Remote Sens. Environ. 2015. accepted. [Google Scholar]
- Morton, D.C.; Nagol, J.; Carabajal, C.C.; Rosette, J.; Palace, M.; Cook, B.D.; Vermote, E.F.; Harding, D.J.; North, P.R. Amazon forests maintain consistent canopy structure and greenness during the dry season. Nature 2014, 506, 221–224. [Google Scholar] [CrossRef] [PubMed]
- Asner, G.P.; Boardman, J.; Field, C.B.; Knapp, D.E.; Kennedy-Bowdoin, T.; Jones, M.O.; Martin, R.E. Carnegie airborne observatory: In-flight fusion of hyperspectral imaging and waveform light detection and ranging for three-dimensional studies of ecosystems. J. Appl. Remote Sens. 2007, 1. [Google Scholar] [CrossRef]
- Asner, G.P.; Knapp, D.E.; Boardman, J.; Green, R.O.; Kennedy-Bowdoin, T.; Eastwood, M.; Martin, R.E.; Anderson, C.; Field, C.B. Carnegie Airborne Observatory-2: Increasing science data dimensionality via high-fidelity multi-sensor fusion. Remote Sens. Environ. 2012, 124, 454–465. [Google Scholar] [CrossRef]
- Cook, B.D.; Nelson, R.F.; Middleton, E.M.; Morton, D.C.; McCorkel, J.T.; Masek, J.G.; Ranson, K.J.; Ly, V.; Montesano, P.M. NASA Goddard’s LiDAR, Hyperspectral and Thermal (G-LiHT) airborne imager. Remote Sens. 2013, 5, 4045–4066. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gastellu-Etchegorry, J.-P.; Yin, T.; Lauret, N.; Cajgfinger, T.; Gregoire, T.; Grau, E.; Feret, J.-B.; Lopes, M.; Guilleux, J.; Dedieu, G.; et al. Discrete Anisotropic Radiative Transfer (DART 5) for Modeling Airborne and Satellite Spectroradiometer and LIDAR Acquisitions of Natural and Urban Landscapes. Remote Sens. 2015, 7, 1667-1701. https://doi.org/10.3390/rs70201667
Gastellu-Etchegorry J-P, Yin T, Lauret N, Cajgfinger T, Gregoire T, Grau E, Feret J-B, Lopes M, Guilleux J, Dedieu G, et al. Discrete Anisotropic Radiative Transfer (DART 5) for Modeling Airborne and Satellite Spectroradiometer and LIDAR Acquisitions of Natural and Urban Landscapes. Remote Sensing. 2015; 7(2):1667-1701. https://doi.org/10.3390/rs70201667
Chicago/Turabian StyleGastellu-Etchegorry, Jean-Philippe, Tiangang Yin, Nicolas Lauret, Thomas Cajgfinger, Tristan Gregoire, Eloi Grau, Jean-Baptiste Feret, Maïlys Lopes, Jordan Guilleux, Gérard Dedieu, and et al. 2015. "Discrete Anisotropic Radiative Transfer (DART 5) for Modeling Airborne and Satellite Spectroradiometer and LIDAR Acquisitions of Natural and Urban Landscapes" Remote Sensing 7, no. 2: 1667-1701. https://doi.org/10.3390/rs70201667