
Analysis of Light Obstruction from Street Lighting in Road Scenes


<p>Examples of illuminated road conditions and shading at night.</p> "> Figure 2
<p>The visualization process diagram for analyzing streetlight illumination and occlusion.</p> "> Figure 3
<p>Original point cloud in the test area.</p> "> Figure 4
<p>Road model based on triangular network method.</p> "> Figure 5
<p>Street lamp model construction.</p> "> Figure 6
<p>Street tree model construction.</p> "> Figure 7
<p>Green belt surface model construction ((<b>a</b>) the original point cloud data; (<b>b</b>) the patched point cloud data; (<b>c</b>) Delaunay triangulated surface model).</p> "> Figure 8
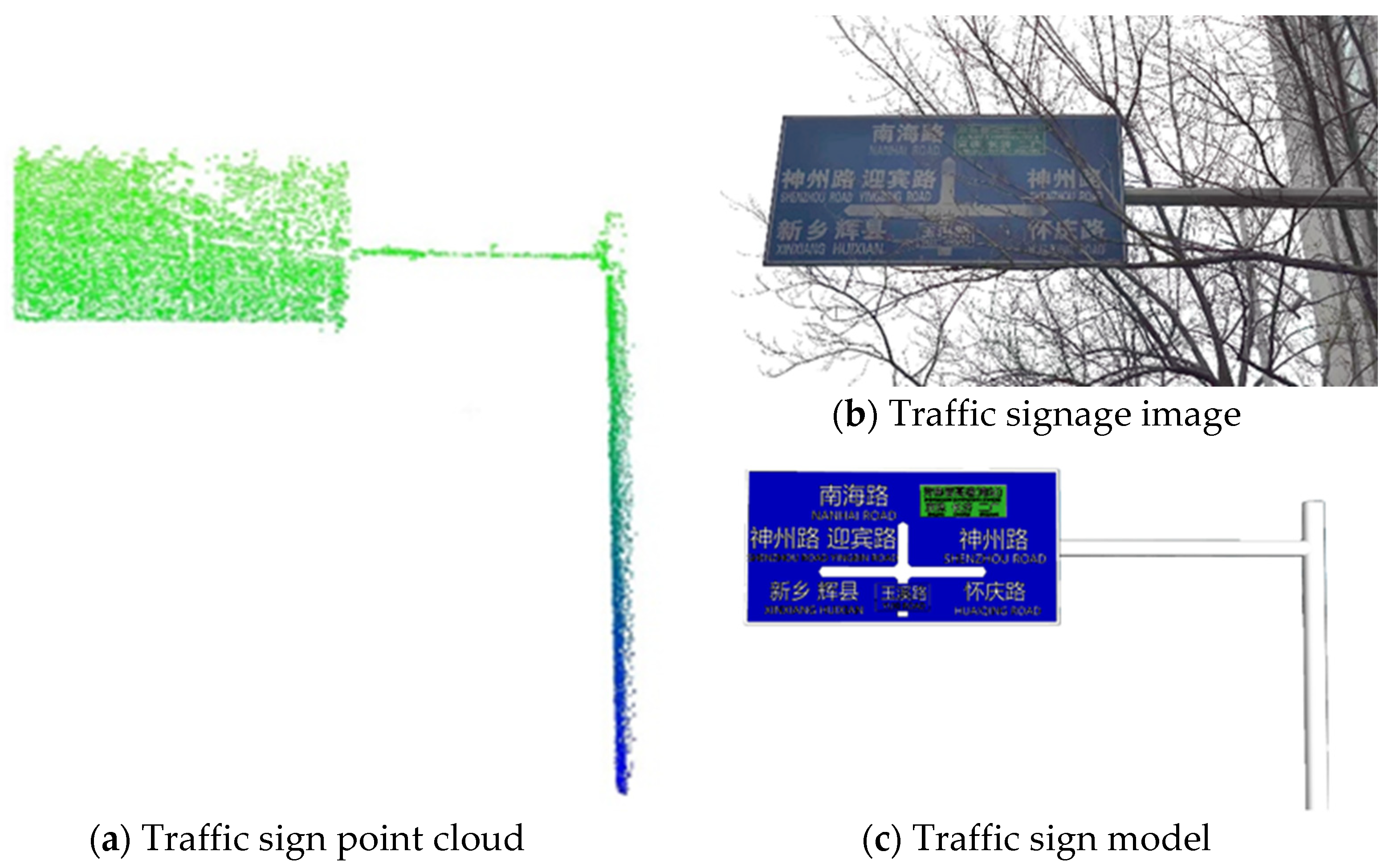
<p>Traffic sign modeling.</p> "> Figure 9
<p>Experiment with a scenario section model.</p> "> Figure 10
<p>Road night scene section model.</p> "> Figure 11
<p>Street lighting areas and light distribution curves.</p> "> Figure 12
<p>Flowchart of occlusion calculation.</p> "> Figure 13
<p>Delaunay’s spatial region growth algorithm.</p> "> Figure 14
<p>The process of calculating the shaded area.</p> "> Figure 15
<p>Simulation of road illumination distribution.</p> "> Figure 16
<p>Street lamp numbering diagram.</p> "> Figure 17
<p>Shaded map of feature shading (the red number in the upper right corner corresponds to the streetlight number).</p> "> Figure 18
<p>Shading of street trees (the red number in the upper right corner corresponds to the streetlight number).</p> "> Figure 19
<p>The obstruction rate of streetlight illumination affected by surrounding objects.</p> "> Figure 20
<p>Street lighting occlusion conditions ((<b>a</b>,<b>b</b>) site photos and scenario simulation photos for streetlight 19, and (<b>c</b>,<b>d</b>) site photos and scenario simulation photos for streetlight 21, respectively).</p> "> Figure 21
<p>Shading of street trees as a percentage of total shaded area.</p> "> Figure 22
<p>Image of streetlight number 12 in the real environment.</p> "> Figure 23
<p>Statistical map of the degree of shading.</p> "> Figure 24
<p>Nighttime road conditions.</p> ">
Abstract
:1. Introduction
- By conducting field measurements and surveying data related to streetlights and street trees, combined with streetlight parameters and brightness information, they analyze the impact of the distribution, size, and configuration of street trees on nighttime road lighting [10,11]. This method is the most direct and simple, but it relies mainly on subjective judgment, lacks quantification of actual obstruction conditions, is inefficient, and is subject to environmental limitations;
- Combining software simulation and modeling to reconstruct road lighting and comparing it with real road lighting data to assess and analyze road surface illumination [12,13,14]. This method is based on certain assumptions and simplified conditions that cannot fully reflect various factors in the actual environment;
- Under special weather conditions (rain, snow, haze, etc.), different light intensities are set, and changes in the visibility of multiple drivers are collected to assess the impact of weather on road lighting [15]. This method effectively assesses the effect of weather on streetlights but does not effectively evaluate the surrounding environment;
- Under different lighting conditions, data on participants’ perceived safety during passing are collected. A spatial physical model is constructed based on streetlight parameters, with a focus on analyzing the comfort and safety of nighttime travel due to lighting [16]. Poor road lighting at night is due to the influence of surrounding objects (Figure 1). Additionally, accident rates are analyzed, and the degree of injury in two-lane intersection accidents is examined with regard to the impact of lighting [17].
2. Materials and Methods
2.1. Vehicle-Mounted LiDAR Data
2.2. Road Scene Modeling
2.2.1. Road Surface Modeling
2.2.2. Street Lighting Modeling
2.2.3. Street Trees Modeling
2.2.4. Green Belt Modeling
2.2.5. Traffic Sign Modeling
2.2.6. Scenario Building
2.3. Street Lighting Distribution
2.4. Shading Analysis Method
3. Results
3.1. Streetlight Layout Parameters and Road Surface Illuminance
3.2. Streetlight Obstruction Results
4. Discussion
4.1. Analysis of Streetlight Installation and Road Surface Lighting Effective Area
4.2. Analysis of Street Lighting Obstruction
4.3. Analysis of the Primary Obstruction Factors
4.4. Analysis of Road Shelter Conditions
- Mild occlusion with an occlusion rate of less than 20%;
- Moderate occlusion with an occlusion rate between 20% and less than 60%;
- Severe occlusion with an occlusion rate of 60% or more.
- For occlusion rates of less than 20% and where street trees cause slight obstructions, the obstructing branches and leaves should be pruned;
- For streetlights with occlusion rates between 20% and 60% and which are moderately obstructed by street trees, the corresponding branches of the street trees should be pruned, with targeted regular monitoring and maintenance;
- For streetlights with an occlusion rate greater than 60% and which are severely obstructed, such as lights No. 9, 14, 16, 19, and 21, the position and lighting method of the streetlights should be promptly adjusted. Additional lighting fixtures should be added around these streetlights to ensure adequate road lighting conditions.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- CIE. Guide on the Limitation of the Effects of Obtrusive Light from Outdoor Lighting Installations, 2nd ed.; CIE: Vienna, Austria, 2017; Volume 150. [Google Scholar] [CrossRef]
- Yan, Y.; Ye, Z.; Yu, K.; Li, N.; Zhang, B. Research on landscaplizalion of municipal road lighting facilities on road tralic salely. China Salely Sci. J. 2022, 32, 154–161. [Google Scholar]
- Markvica, K.; Richter, G.; Lenz, G. Impact of urban street lighting on road users’ perception of public space and mobility behavior. Build. Environ. 2019, 154, 32–43. [Google Scholar] [CrossRef]
- Liang, F.F. Study on the Influence Factors of Lighting Environment of Urban Roadway Lighting Based on Glare and Occlusion. Master’s Thesis, Chongqing University, Chongqing, China, 2018. [Google Scholar]
- He, Y.; Zhang, X.; Quan, L.; Mi, R.; Cui, Y.; Xu, J.; Tian, Z. Influence of coloured light projected from night-time excessive luminance outdoor LED display screens on vehicle driving safety along urban roads. Build. Environ. 2021, 188, 107488. [Google Scholar] [CrossRef]
- Chen, F.; Peng, S.L. Effects of light pollution on street trees at night in urban areas. Ecol. Environ. Sci. 2013, 22, 1193–1198. [Google Scholar]
- Péter, Á.; Seress, G.; Sándor, K.; Vincze, E.; Klucsik, K.P.; Liker, A. The effect of artificial light at night on the biomass of caterpillars feeding in urban tree canopies. Urban Ecosyst. 2020, 23, 1311–1319. [Google Scholar] [CrossRef]
- Yao, X.C.; Tu, H.Q.; Wang, X.L.; Wang, J. The effect of supplemental LED night lighting on the growth and physiology of the Para rubber tree. J. Rubber Res. 2021, 24, 321–326. [Google Scholar] [CrossRef]
- Czaja, M.; Anna, K. How light pollution can affect spring development of urban trees and shrubs. Urban For. Urban Green. 2022, 77, 127753. [Google Scholar] [CrossRef]
- Lu, Q.; Han, S.; Ding, Y.F.; Chi, Z.; Feng, Y.; Liu, S.; Liu, P. Research on the influence of street trees on the lighting effect of LED street lights. China Light Light. 2016, 2, 4–8. [Google Scholar]
- Wang, X.D.; Wu, Y.; Wu, W.Z.; Han, X.; Cui, S.X.; Lu, W.N. Survey on Light Environment of Urban Roads and the Impacts of Street Trees—A Case Study of Ping’an Avenue in Zhengzhou City; Chinese Society of Landscape Architecture, Ed.; Chinese Society of Landscape Architecture: Beijing, China, 2020; pp. 430–435. [Google Scholar]
- Mi, X.X.; Yang, B.S.; Dong, Z. Rapid computation and application of vehicle-mounted laser point cloud road scene visual field. J. Wuhan Univ. (Inf. Sci. Ed.) 2020, 45, 258–264. [Google Scholar]
- Leccese, F.; Lista, D.; Salvadori, G.; Beccali, M.; Bonomolo, M. Space syntax analysis applied to urban street lighting: Relations between spatial properties and lighting levels. Appl. Sci. 2019, 9, 3331. [Google Scholar] [CrossRef]
- Yao, Q.; Wang, H.; Uttley, J.; Zhuang, X. Illuminance reconstruction of road lighting in urban areas for efficient and healthy lighting performance evaluation. Appl. Sci. 2018, 8, 1646. [Google Scholar] [CrossRef]
- Hu, J.; Sun, S.; Wang, R. Research on the influence of light source characteristics on traffic visual distance in foggy areas at night. Build. Environ. 2022, 212, 108818. [Google Scholar] [CrossRef]
- Haans, A.; de Kort, Y.A.W. Light distribution in dynamic street lighting: Two experimental studies on its effects on perceived safety, prospect, concealment, and escape. J. Environ. Psychol. 2012, 31, 342–352. [Google Scholar] [CrossRef]
- Anarkooli, A.J.; Hosseinlou, M.H. Analysis of the injury severity of crashes by considering different lighting conditions on two-lane rural roads. J. Saf. Res. 2016, 56, 57–65. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.; Kim, M. Applications of 3D point cloud data in the construction industry: A fifteen-year review from 2004 to 2018. Adv. Eng. Inform. 2019, 39, 306–319. [Google Scholar] [CrossRef]
- Xu, Y.; Stilla, U. Toward building and civil infrastructure reconstruction from point clouds: A review on data and key techniques. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 2857–2885. [Google Scholar] [CrossRef]
- Xu, Y.; Tong, X.; Stilla, U. Voxel-based representation of 3D point clouds: Methods, applications, and its potential use in the construction industry. Autom. Constr. 2021, 126, 103675. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, W.; Liu, J.; Chen, T.; Wang, S.; Yu, B.; Qin, X. Framework for geometric information extraction and digital modeling from LiDAR data of road scenarios. Remote Sens. 2023, 15, 576. [Google Scholar] [CrossRef]
- Xu, J.; Shan, J.; Wang, G. Hierarchical modeling of street trees using mobile laser scanning. Remote Sens. 2020, 12, 2321. [Google Scholar] [CrossRef]
- Li, J.; Wu, H.; Xiao, Z.; Lu, H. 3D modeling of laser-scanned trees based on skeleton refined extraction. Int. J. Appl. Earth Obs. Geoinf. 2022, 112, 102943. [Google Scholar] [CrossRef]
- Li, Y.; Wang, P.; Sun, J.; Gan, X. Simulation of tree point cloud based on the ray-tracing algorithm and three-dimensional tree model. Biosyst. Eng. 2020, 200, 259–271. [Google Scholar] [CrossRef]
- Chen, D.; He, X. Fast automatic three-dimensional road model reconstruction based on mobile laser scanning system. Optik 2015, 126, 725–730. [Google Scholar] [CrossRef]
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An easy-to-use airborne LiDAR data filtering method based on cloth simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Zhou, Y.; Tuzel, O. Voxelnet: End-to-end learning for point cloud based 3d object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 4490–4499. [Google Scholar]
- Liu, Z.; van Oosterom, P.; Balado, J.; Swart, A.; Beers, B. Detection and reconstruction of static vehicle-related ground occlusions in point clouds from mobile laser scanning. Autom. Constr. 2022, 141, 104461. [Google Scholar] [CrossRef]
- Li, Y.; Dong, Y.; Zhang, X.; Li, P. Vehicle-mounted LiDAR point cloud street light extraction method. Acta Geod. Cartogr. Sin. 2018, 47, 247–259. [Google Scholar]
- Yang, Y.Z.; Lin, W.S. Tree branch segmentation and 3D reconstruction based on laser point cloud data. J. Northwest For. Univ. 2020, 35, 171–176. [Google Scholar]
- Whebell, R.M.; Moroney, T.J.; Turner, I.W.; Pethiyagoda, R.; McCue, S.W. Implicit reconstructions of thin leaf surfaces from large, noisy point clouds. Appl. Math. Model. 2021; prepublish. [Google Scholar]
- Li, Y.Q.; Li, P.P.; Dong, Y.H.; Fan, H.L. Automatic extraction and classification of pole-like features in vehicle-mounted LiDAR point cloud data. Acta Geod. Cartogr. Sin. 2020, 49, 724–735. [Google Scholar]
- CJJ 45-2015; Standard for Lighting Design of Urban Road. China Architecture & Building Press: Beijing, China, 2015.
- Guerry, E.; Gălățanu, C.D.; Canale, L.; Zissis, G. Optimizing the luminous environment using DiaLUX software at “Constantin and Elena” Elderly House—Study Case. Procedia Manuf. 2019, 32, 466–473. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Light Distribution Types | Full Cut-Off Luminaire | Semi-Cut-Off Luminaire | Non-Cut-Off Luminaire | |||
|---|---|---|---|---|---|---|
| Setup method | Height (H) | Spacing (S) | Height (H) | Spacing (S) | Height (H) | Spacing (S) |
| Unilateral | ||||||
| Bilateral interlacing | ||||||
| Bilateral symmetry | ||||||
| Number | Theoretical Lighting Area (m2) | Total Shadow Area (m2) | Effective Lighting Area (m2) | Shaded Area of Street Trees (m2) | Percentage of Street Tree Shading | Obstruction Rate |
|---|---|---|---|---|---|---|
| 1 | 66.0 | 17.4 | 48.6 | 17.2 | 98.6 | 26.4 |
| 2 | 67.2 | 24.6 | 42.5 | 22.6 | 91.7 | 36.7 |
| 3 | 66.3 | 9.0 | 57.3 | 7.2 | 79.8 | 13.6 |
| 4 | 66.7 | 34.2 | 32.5 | 33.0 | 96.4 | 51.3 |
| 5 | 65.8 | 38.2 | 27.6 | 35.0 | 91.7 | 58 |
| 6 | 65.7 | 28.6 | 37.1 | 25.0 | 87.6 | 43.5 |
| 7 | 67.2 | 40.7 | 26.6 | 39.7 | 97.6 | 60.5 |
| 8 | 66.6 | 31.2 | 35.4 | 29.7 | 95.1 | 46.9 |
| 9 | 66.2 | 42.0 | 24.2 | 38.7 | 92.2 | 63.4 |
| 10 | 66.7 | 38.4 | 28.3 | 36.0 | 93.9 | 57.6 |
| 11 | 65.1 | 32.3 | 32.8 | 31.2 | 96.4 | 49.7 |
| 12 | 65.8 | 2.5 | 63.2 | 1.0 | 40.3 | 3.9 |
| 13 | 66.9 | 12.6 | 54.3 | 11.0 | 87.4 | 18.9 |
| 14 | 65.6 | 42.1 | 23.6 | 40.2 | 95.7 | 64.1 |
| 15 | 66.4 | 16.4 | 50.0 | 14.2 | 86.8 | 24.7 |
| 16 | 66.6 | 40.3 | 26.3 | 39.0 | 96.7 | 60.6 |
| 17 | 66.2 | 2.5 | 63.7 | 1.6 | 65.6 | 3.8 |
| 18 | 67.0 | 10.5 | 56.5 | 6.7 | 64.1 | 15.6 |
| 19 | 66.0 | 51.0 | 15.0 | 47.5 | 93.2 | 77.3 |
| 20 | 65.8 | 28.9 | 36.9 | 27.7 | 95.9 | 44 |
| 21 | 66.1 | 51.5 | 14.6 | 49.0 | 95.2 | 77.9 |
| 22 | 66.7 | 15.9 | 50.8 | 15.2 | 95.3 | 23.9 |
| 23 | 65.6 | 31.0 | 34.6 | 29.3 | 94.4 | 47.3 |
| Pilot Area Data | Comply with Regulations (Yes/No) | |
|---|---|---|
| Street lighting spacing | 40–50 m | yes |
| Street lighting high | 10 m | yes |
| Light Diffusion Angle (60°–150°) | 110° | yes |
| light source center projection point (1/2–1/3) | 5–6 m | yes |
| Average illumination (8~10 lx) | 8.73 lx | yes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, J.; Li, Y.; Liu, H.; Li, K.; Hao, D.; Wang, Z. Analysis of Light Obstruction from Street Lighting in Road Scenes. Remote Sens. 2023, 15, 5655. https://doi.org/10.3390/rs15245655
Ren J, Li Y, Liu H, Li K, Hao D, Wang Z. Analysis of Light Obstruction from Street Lighting in Road Scenes. Remote Sensing. 2023; 15(24):5655. https://doi.org/10.3390/rs15245655
Chicago/Turabian StyleRen, Jingzhi, Yongqiang Li, Huiyun Liu, Kanghong Li, Daoqian Hao, and Zhiyao Wang. 2023. "Analysis of Light Obstruction from Street Lighting in Road Scenes" Remote Sensing 15, no. 24: 5655. https://doi.org/10.3390/rs15245655
APA StyleRen, J., Li, Y., Liu, H., Li, K., Hao, D., & Wang, Z. (2023). Analysis of Light Obstruction from Street Lighting in Road Scenes. Remote Sensing, 15(24), 5655. https://doi.org/10.3390/rs15245655