Non-Markovianity of a Central Spin Interacting with a Lipkin–Meshkov–Glick Bath via a Conditional Past–Future Correlation


{kind=link}
<p>For two different measurement operators, (<b>a</b>) for <math display="inline"><semantics> <mrow> <msub> <mi>Ω</mi> <mrow> <mover accent="true"> <mi>z</mi> <mo>^</mo> </mover> <mo>=</mo> <mo>±</mo> <mn>1</mn> </mrow> </msub> </mrow> </semantics></math> and (<b>b</b>) for <math display="inline"><semantics> <mrow> <msub> <mi>Ω</mi> <mrow> <mover accent="true"> <mi>x</mi> <mo>^</mo> </mover> <mo>=</mo> <mo>±</mo> <mn>1</mn> </mrow> </msub> </mrow> </semantics></math>. In both cases, the initial states are chosen to be the same as <math display="inline"><semantics> <mrow> <msubsup> <mi>ρ</mi> <mi>tot</mi> <mn>3</mn> </msubsup> </mrow> </semantics></math>(0) and the parameters are N = 300, <math display="inline"><semantics> <mrow> <mi>γ</mi> </mrow> </semantics></math> = 0.98, <math display="inline"><semantics> <mrow> <msup> <mi>γ</mi> <mo>'</mo> </msup> </mrow> </semantics></math> = 0.002, <span class="html-italic">T<sub>B</sub></span> = 0.01, =/3, <math display="inline"><semantics> <mrow> <mi>γ</mi> <mo>=</mo> <mfrac bevelled="true"> <mi>π</mi> <mn>3</mn> </mfrac> </mrow> </semantics></math>.</p> "> Figure 2
{kind=link}
<p>For <math display="inline"><semantics> <mrow> <msubsup> <mi>ρ</mi> <mrow> <mi>t</mi> <mi>o</mi> <mi>t</mi> </mrow> <mn>2</mn> </msubsup> <mo stretchy="false">(</mo> <mn>0</mn> <mo stretchy="false">)</mo> </mrow> </semantics></math> with <math display="inline"><semantics> <mrow> <msub> <mi>Ω</mi> <mrow> <mover accent="true"> <mi>x</mi> <mo>^</mo> </mover> <mo>=</mo> <mo>±</mo> <mn>1</mn> </mrow> </msub> </mrow> </semantics></math>. The parameters are the same as those in <a href="#entropy-22-00895-f001" class="html-fig">Figure 1</a>.</p> "> Figure 3
{kind=link}
<p>For <math display="inline"><semantics> <mrow> <msub> <mi>Ω</mi> <mrow> <mover accent="true"> <mi>x</mi> <mo>^</mo> </mover> <mo>=</mo> <mo>±</mo> <mn>1</mn> </mrow> </msub> </mrow> </semantics></math> and different <math display="inline"><semantics> <mrow> <msup> <mi mathvariant="sans-serif">λ</mi> <mo>'</mo> </msup> </mrow> </semantics></math>; (<b>a</b>) <math display="inline"><semantics> <mrow> <msup> <mi mathvariant="sans-serif">λ</mi> <mo>'</mo> </msup> <mo>=</mo> <mn>0.001</mn> </mrow> </semantics></math>; (<b>b</b>) <math display="inline"><semantics> <mrow> <msup> <mi mathvariant="sans-serif">λ</mi> <mo>'</mo> </msup> <mo>=</mo> <mn>0.005</mn> </mrow> </semantics></math> and (<b>c</b>) <math display="inline"><semantics> <mrow> <msup> <mi mathvariant="sans-serif">λ</mi> <mo>'</mo> </msup> <mo>=</mo> <mn>0.01</mn> </mrow> </semantics></math>. The initial state is <math display="inline"><semantics> <mrow> <msubsup> <mi>ρ</mi> <mrow> <mi>t</mi> <mi>o</mi> <mi>t</mi> </mrow> <mn>3</mn> </msubsup> <mo stretchy="false">(</mo> <mn>0</mn> <mo stretchy="false">)</mo> </mrow> </semantics></math> and the other parameters are the same as those in <a href="#entropy-22-00895-f001" class="html-fig">Figure 1</a>.</p> "> Figure 4
{kind=link}
<p>For <math display="inline"><semantics> <mrow> <msub> <mi>Ω</mi> <mrow> <mover accent="true"> <mi>z</mi> <mo>^</mo> </mover> <mo>=</mo> <mo>±</mo> <mn>1</mn> </mrow> </msub> </mrow> </semantics></math> and different <math display="inline"><semantics> <mrow> <msup> <mi mathvariant="sans-serif">λ</mi> <mo>'</mo> </msup> </mrow> </semantics></math>; (<b>a</b>) <math display="inline"><semantics> <mrow> <msup> <mi mathvariant="sans-serif">λ</mi> <mo>'</mo> </msup> <mo>=</mo> <mn>0.001</mn> </mrow> </semantics></math>; (<b>b</b>) <math display="inline"><semantics> <mrow> <msup> <mi mathvariant="sans-serif">λ</mi> <mo>'</mo> </msup> <mo>=</mo> <mn>0.005</mn> </mrow> </semantics></math>and (<b>c</b>) <math display="inline"><semantics> <mrow> <msup> <mi mathvariant="sans-serif">λ</mi> <mo>'</mo> </msup> <mo>=</mo> <mn>0.01</mn> </mrow> </semantics></math>. The initial state is <math display="inline"><semantics> <mrow> <msubsup> <mi>ρ</mi> <mrow> <mi>t</mi> <mi>o</mi> <mi>t</mi> </mrow> <mn>3</mn> </msubsup> <mo stretchy="false">(</mo> <mn>0</mn> <mo stretchy="false">)</mo> </mrow> </semantics></math> and the other parameters are the same as those in <a href="#entropy-22-00895-f001" class="html-fig">Figure 1</a>.</p> "> Figure 5
{kind=link}
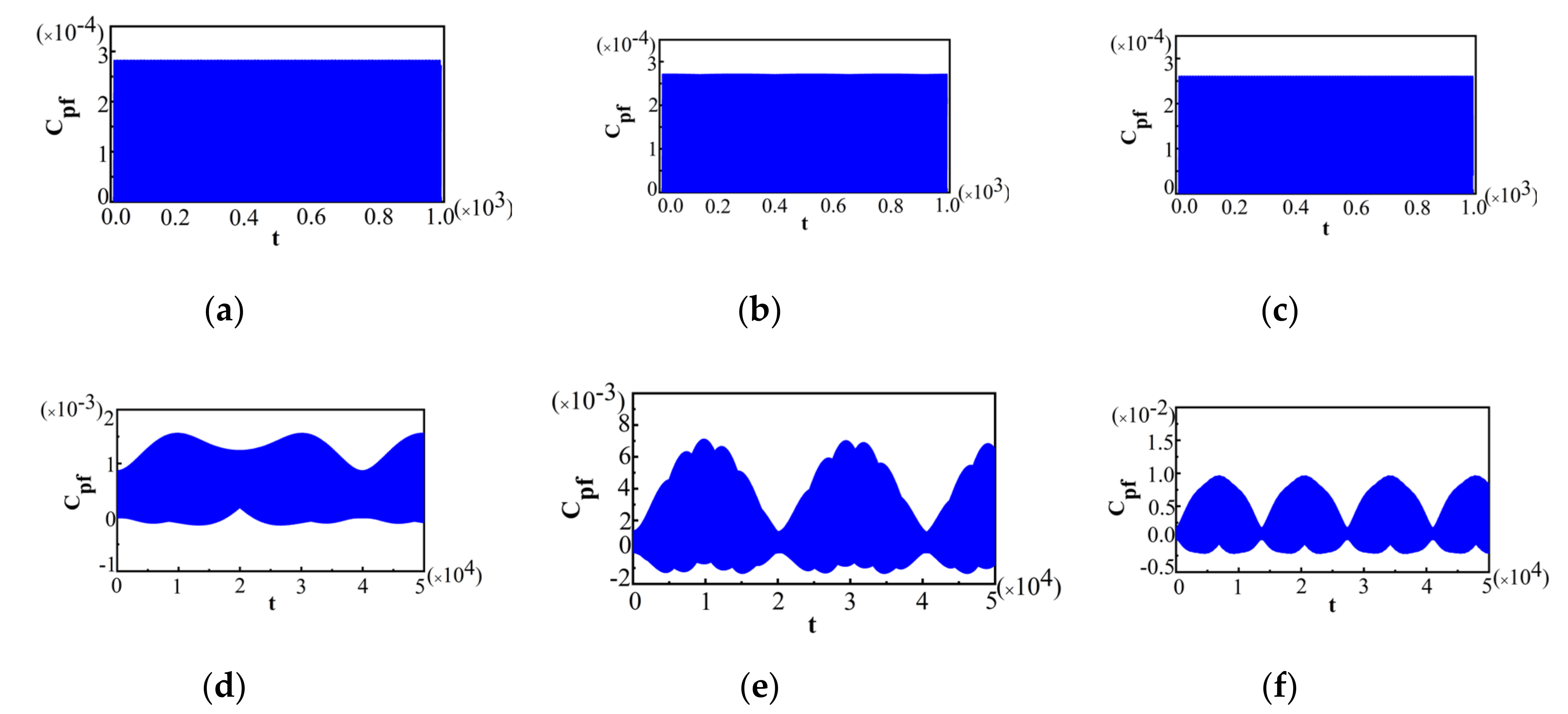
<p>For <math display="inline"><semantics> <mrow> <msub> <mi>Ω</mi> <mrow> <mover accent="true"> <mi>x</mi> <mo>^</mo> </mover> <mo>=</mo> <mo>±</mo> <mn>1</mn> </mrow> </msub> </mrow> </semantics></math> and different <math display="inline"><semantics> <mi mathvariant="sans-serif">λ</mi> </semantics></math> near the quantum phase transition (QPT) point in the case of <math display="inline"><semantics> <mrow> <mi>N</mi> <mo>=</mo> <mn>500</mn> </mrow> </semantics></math>, <math display="inline"><semantics> <mrow> <msup> <mi mathvariant="sans-serif">λ</mi> <mo>'</mo> </msup> <mo>=</mo> <mn>0.002</mn> </mrow> </semantics></math>; (<b>a</b>) <math display="inline"><semantics> <mrow> <mi mathvariant="sans-serif">λ</mi> <mo>=</mo> <mn>0.97</mn> </mrow> </semantics></math>; (<b>b</b>) <math display="inline"><semantics> <mrow> <mi mathvariant="sans-serif">λ</mi> <mo>=</mo> <mn>0.98</mn> </mrow> </semantics></math>; (<b>c</b>) <math display="inline"><semantics> <mrow> <mi mathvariant="sans-serif">λ</mi> <mo>=</mo> <mn>0.99</mn> </mrow> </semantics></math>; (<b>d</b>) <math display="inline"><semantics> <mrow> <mi mathvariant="sans-serif">λ</mi> <mo>=</mo> <mn>1.01</mn> </mrow> </semantics></math>; (<b>e</b>) <math display="inline"><semantics> <mrow> <mi mathvariant="sans-serif">λ</mi> <mo>=</mo> <mn>1.02</mn> </mrow> </semantics></math>; (<b>f</b>) <math display="inline"><semantics> <mrow> <mi mathvariant="sans-serif">λ</mi> <mo>=</mo> <mn>1.03</mn> </mrow> </semantics></math>.</p> "> Figure 6
{kind=link}
<p>For <math display="inline"><semantics> <mrow> <msub> <mi>Ω</mi> <mrow> <mover accent="true"> <mi>z</mi> <mo>^</mo> </mover> <mo>=</mo> <mo>±</mo> <mn>1</mn> </mrow> </msub> </mrow> </semantics></math> and different <math display="inline"><semantics> <mi mathvariant="sans-serif">λ</mi> </semantics></math> near the QPT point in the case of <math display="inline"><semantics> <mrow> <mi>N</mi> <mo>=</mo> <mn>500</mn> </mrow> </semantics></math>; <math display="inline"><semantics> <mrow> <msup> <mi mathvariant="sans-serif">λ</mi> <mo>'</mo> </msup> <mo>=</mo> <mn>0.002</mn> </mrow> </semantics></math>; (<b>a</b>) <math display="inline"><semantics> <mrow> <mi mathvariant="sans-serif">λ</mi> <mo>=</mo> <mn>0.97</mn> </mrow> </semantics></math>; (<b>b</b>) <math display="inline"><semantics> <mrow> <mi mathvariant="sans-serif">λ</mi> <mo>=</mo> <mn>0.98</mn> </mrow> </semantics></math>; (<b>c</b>) <math display="inline"><semantics> <mrow> <mi mathvariant="sans-serif">λ</mi> <mo>=</mo> <mn>0.99</mn> </mrow> </semantics></math>; (<b>d</b>) <math display="inline"><semantics> <mrow> <mi mathvariant="sans-serif">λ</mi> <mo>=</mo> <mn>1.01</mn> </mrow> </semantics></math>; (<b>e</b>) <math display="inline"><semantics> <mrow> <mi mathvariant="sans-serif">λ</mi> <mo>=</mo> <mn>1.02</mn> </mrow> </semantics></math>; (<b>f</b>) <math display="inline"><semantics> <mrow> <mi mathvariant="sans-serif">λ</mi> <mo>=</mo> <mn>1.03</mn> </mrow> </semantics></math>.</p> "> Figure 7
{kind=link}
<p>For <math display="inline"><semantics> <mrow> <msub> <mi>Ω</mi> <mrow> <mover accent="true"> <mi>x</mi> <mo>^</mo> </mover> <mo>=</mo> <mo>±</mo> <mn>1</mn> </mrow> </msub> </mrow> </semantics></math> and different <math display="inline"><semantics> <mi mathvariant="sans-serif">λ</mi> </semantics></math> near the QPT point in the case of <math display="inline"><semantics> <mrow> <msub> <mi>T</mi> <mi>B</mi> </msub> <mo>=</mo> <mn>0.001</mn> </mrow> </semantics></math>; (<b>a</b>) <math display="inline"><semantics> <mrow> <mi mathvariant="sans-serif">λ</mi> <mo>=</mo> <mn>0.97</mn> </mrow> </semantics></math>; (<b>b</b>) <math display="inline"><semantics> <mrow> <mi mathvariant="sans-serif">λ</mi> <mo>=</mo> <mn>0.98</mn> </mrow> </semantics></math>; (<b>c</b>) <math display="inline"><semantics> <mrow> <mi mathvariant="sans-serif">λ</mi> <mo>=</mo> <mn>0.99</mn> </mrow> </semantics></math>; (<b>d</b>) <math display="inline"><semantics> <mrow> <mi mathvariant="sans-serif">λ</mi> <mo>=</mo> <mn>1.01</mn> </mrow> </semantics></math>; (<b>e</b>) <math display="inline"><semantics> <mrow> <mi mathvariant="sans-serif">λ</mi> <mo>=</mo> <mn>1.02</mn> </mrow> </semantics></math>; (<b>f</b>) <math display="inline"><semantics> <mrow> <mi mathvariant="sans-serif">λ</mi> <mo>=</mo> <mn>1.03</mn> </mrow> </semantics></math>. The other parameters are the same as those in <a href="#entropy-22-00895-f005" class="html-fig">Figure 5</a>.</p> "> Figure 8
{kind=link}
<p>For <math display="inline"><semantics> <mrow> <msub> <mi>Ω</mi> <mrow> <mover accent="true"> <mi>z</mi> <mo>^</mo> </mover> <mo>=</mo> <mo>±</mo> <mn>1</mn> </mrow> </msub> </mrow> </semantics></math> and different <math display="inline"><semantics> <mi mathvariant="sans-serif">λ</mi> </semantics></math> near the QPT point in the case of <math display="inline"><semantics> <mrow> <msub> <mi>T</mi> <mi>B</mi> </msub> <mo>=</mo> <mn>0.001</mn> </mrow> </semantics></math>; (<b>a</b>) <math display="inline"><semantics> <mrow> <mi mathvariant="sans-serif">λ</mi> <mo>=</mo> <mn>0.97</mn> </mrow> </semantics></math>; (<b>b</b>) <math display="inline"><semantics> <mrow> <mi mathvariant="sans-serif">λ</mi> <mo>=</mo> <mn>0.98</mn> </mrow> </semantics></math>; (<b>c</b>) <math display="inline"><semantics> <mrow> <mi mathvariant="sans-serif">λ</mi> <mo>=</mo> <mn>0.99</mn> </mrow> </semantics></math>; (<b>d</b>) <math display="inline"><semantics> <mrow> <mi mathvariant="sans-serif">λ</mi> <mo>=</mo> <mn>1.01</mn> </mrow> </semantics></math>; (<b>e</b>) <math display="inline"><semantics> <mrow> <mi mathvariant="sans-serif">λ</mi> <mo>=</mo> <mn>1.02</mn> </mrow> </semantics></math>; (<b>f</b>) <math display="inline"><semantics> <mrow> <mi mathvariant="sans-serif">λ</mi> <mo>=</mo> <mn>1.03</mn> </mrow> </semantics></math>. The other parameters are the same as those in <a href="#entropy-22-00895-f005" class="html-fig">Figure 5</a>.</p> ">
Abstract
:1. Introduction
2. Model and Methods
2.1. Model
2.2. Methods
3. Effects of Different Factors on
3.1. Effect of Measurement Operators on
3.2. Effect of the Initial Correlation on
3.3. Effect of on
3.4. Effects of the Bath on
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zurek, W.H. Decoherence, einselection, and the quantum origins of the classical. Rev. Mod. Phys. 2003, 75, 715. [Google Scholar] [CrossRef] [Green Version]
- Breuer, H.P.; Petruccione, F. The Theory of Open Quantum Systems; Oxford University Press: New York, NY, USA, 2002. [Google Scholar]
- Davies, E.B. Quantum Theory of Open Systems; Academic Press: New York, NY, USA, 1976. [Google Scholar]
- Rivas, Á.; Huelga, S.F. Open Quantum Systems. An Introduction; Springer: Heidelberg, Germany, 2011. [Google Scholar]
- Weiss, U. Quantum Dissipative Systems; World Scientific: Singapore, 2000. [Google Scholar]
- Lindblad, G. On the generators of quantum dynamical semigroups. Commun. Math. Phys. 1976, 48, 119. [Google Scholar] [CrossRef]
- Rivas, Á.S.; Huelga, F.; Plenio, M.B. Quantum non-Markovianity: Characterization, quantification and detection. Rep. Prog. Phys. 2014, 77, 094001. [Google Scholar] [CrossRef] [PubMed]
- Breuer, H.P.; Laine, E.M.; Piilo, J.; Vacchini, B. Colloquium: Non-Markovian dynamics in open quantum systems. Rev. Mod. Phys. 2016, 88, 021002. [Google Scholar] [CrossRef] [Green Version]
- Kubota, Y.; Nobusada, K. Applicability of site-basis time-evolution equation for thermalization of exciton states in a quantum dot array. J. Phys. Soc. Jpn. 2009, 78, 114603. [Google Scholar] [CrossRef]
- Gardiner, C.W.; Zoller, P. Quantum Noise; Springer: Berlin, Germany, 2004. [Google Scholar]
- Scally, M.O.; Zubairy, M.S. Quantum Optics; Cambridge University Press: Cambridge, UK, 1997. [Google Scholar]
- Kane, B.E. A silicon-based nuclear spin quantum computer. Nature 1998, 393, 133–137. [Google Scholar] [CrossRef]
- Chin, A.W.; Datta, A.; Caruso, F.; Huelga, S.F.; Plenio, M.B. Noise-assisted energy transfer in quantum networks and light-harvesting complexes. New J. Phys. 2010, 12, 065002. [Google Scholar] [CrossRef]
- Shao, J. Decoupling quantum dissipation interaction via stochastic fields. J. Chem. Phys. 2004, 120, 5053. [Google Scholar] [CrossRef]
- Feller, W. An Introduction to Probability Theory and Its Applications; John Wiley: New York, NY, USA, 1966. [Google Scholar]
- Rivas, Á.; Huelga, S.F.; Plenio, M.B. Entanglement and Non-Markovianity of Quantum Evolutions. Phys. Rev. Lett. 2010, 105, 050403. [Google Scholar] [CrossRef] [Green Version]
- Hou, S.C.; Yi, X.X.; Yu, S.X.; Oh, C.H. Alternative non-Markovianity measure by divisibility of dynamical maps. Phys. Rev. A 2011, 83, 062115. [Google Scholar] [CrossRef] [Green Version]
- He, Z.; Zeng, H.S.; Li, Y.; Wang, Q.; Yao, C. Non-Markovianity measure based on the relative entropy of coherence in an extended space. Phys. Rev. A 2017, 96, 022106. [Google Scholar] [CrossRef]
- Chruściński, D.; Rivas, Á.; Stormer, E. Divisibility and Information Flow Notions of Quantum Markovianity for Noninvertible Dynamical Maps. Phys. Rev. Lett. 2018, 121, 080407. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, H.-B.; Lien, J.-Y.; Chen, G.-Y.; Chen, Y.-N. Hierarchy of non-Markovianity and k-divisibility phase diagram of quantum processes in open systems. Phys. Rev. A 2015, 92, 042105. [Google Scholar] [CrossRef] [Green Version]
- Chruściński, D.; Maniscalco, S. Degree of Non-Markovianity of Quantum Evolution. Phys. Rev. Lett. 2014, 112, 120404. [Google Scholar] [CrossRef] [Green Version]
- Breuer, H.P.; Laine, E.M.; Piilo, J. Measure for the Degree of Non-Markovian Behavior of Quantum Processes in Open Systems. Phys. Rev. Lett. 2009, 103, 210401. [Google Scholar] [CrossRef] [Green Version]
- Lu, X.M.; Wang, X.G.; Sun, C.P. Quantum Fisher information flow and non-Markovian processes of open systems. Phys. Rev. A 2010, 82, 042103. [Google Scholar] [CrossRef] [Green Version]
- Song, H.; Luo, S.; Hong, Y. Quantum non-Markovianity based on the Fisher-information matrix. Phys. Rev. A 2015, 91, 042110. [Google Scholar] [CrossRef]
- Rajagopal, A.K.; Devi, A.R.U.; Rendell, R.W. Kraus representation of quantum evolution and fidelity as manifestations of Markovian and non-Markovian forms. Phys. Rev. A 2010, 82, 042107. [Google Scholar] [CrossRef] [Green Version]
- Luo, S.; Fu, S.; Song, H. Quantifying non-Markovianity via correlations. Phys. Rev. A 2012, 86, 044101. [Google Scholar] [CrossRef]
- Jiang, M.; Luo, S. Comparing quantum Markovianities: Distinguishability versus correlations. Phys. Rev. A 2013, 88, 034101. [Google Scholar] [CrossRef]
- Bylicka, B.; Chruściński, D.; Maniscalco, S. Non-Markovianity and reservoir memory of quantum channels: A quantum information theory perspective. Sci. Rep. 2014, 4, 5720. [Google Scholar] [CrossRef] [PubMed]
- Lorenzo, S.; Plastina, F.; Paternostro, M. Geometrical characterization of non-Markovianity. Phys. Rev. A 2013, 88, 020102(R). [Google Scholar] [CrossRef]
- Bae, J.; Chruściński, D. Operational Characterization of Divisibility of Dynamical Maps. Phys. Rev. Lett. 2016, 117, 050403. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ali, M.M.; Lo, P.Y.; Tu, M.W.Y.; Zhang, W.M. Non-Markovianity measure using two-time correlation functions. Phys. Rev. A 2015, 92, 062306. [Google Scholar] [CrossRef] [Green Version]
- Chruściński, D.; Kossakowski, A.; Rivas, Á. Measures of non-Markovianity: Divisibility versus backflow of information. Phys. Rev. A 2011, 83, 052128. [Google Scholar] [CrossRef] [Green Version]
- Bylicka, B.; Johansson, M.; Acín, A. Constructive Method for Detecting the Information Backflow of Non-Markovian Dynamics. Phys. Rev. Lett. 2017, 118, 120501. [Google Scholar] [CrossRef]
- Megier, N.; Chruściński, D.; Piilo, J.; Strunz, W.T. Supplementary information: Eternal non-Markovianity: From random unitary Markov chai realisations. Sci. Rep. 2017, 7, 6379. [Google Scholar] [CrossRef]
- Budini, A.A. Maximally non-Markovian quantum dynamics without environment-to-system backflow of information. Phys. Rev. A 2018, 97, 052133. [Google Scholar] [CrossRef] [Green Version]
- Xu, Z.Y.; Yang, W.L.; Feng, M. Proposed method for direct measurement of the non-Markovian character of the qubits coupled to bosonic reservoirs. Phys. Rev. A 2010, 81, 044105. [Google Scholar] [CrossRef] [Green Version]
- He, Z.; Zou, J.; Li, L.; Shao, B. Effective method of calculating the non-Markovianity N for single-channel open systems. Phys. Rev. A 2011, 83, 012108. [Google Scholar] [CrossRef] [Green Version]
- Li, G.J.; Zou, J.; Shao, B. Non-Markovianity of the damped Jaynes-Cummings model with detuning. Phys. Rev. A 2010, 81, 062124. [Google Scholar] [CrossRef]
- Xiang, J.D.; Qin, L.G.; Tian, L.J. Non-Markovianity of the Heisenberg XY spin environment with Dzyaloshinskii–Moriya interaction. Chin. Phys. B 2014, 23, 110305. [Google Scholar] [CrossRef]
- Tian, L.J.; Ti, M.M.; Zhai, X.D. Non-Markovianity of a qubit coupled with an isotropic Lipkin–Meshkov–Glick bath. Chin. Phys. B 2015, 24, 100305. [Google Scholar] [CrossRef]
- Pollock, F.A.; Rodríguez-Rosario, C.; Frauenheim, T.; Paternostro, M.; Modi, K. Operational Markov Condition for Quantum Processes. Phys. Rev. Lett. 2018, 120, 040405. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pollock, F.A.; Rodríguez-Rosario, C.; Frauenheim, T.; Paternostro, M.; Modi, K. Non-Markovian quantum processes: Complete framework and efficient characterization. Phys. Rev. A 2018, 97, 012127. [Google Scholar] [CrossRef] [Green Version]
- Budini, A.A. Conditional past-future correlation induced by non-Markovian dephasing reservoirs. Phys. Rev. A 2019, 99, 052125. [Google Scholar] [CrossRef] [Green Version]
- Budini, A.A. Quantum Non-Markovian Processes Break Conditional Past-Future Independence. Phys. Rev. Lett. 2018, 121, 240401. [Google Scholar] [CrossRef] [Green Version]
- Vega, I.D.; Alonso, D. Dynamics of non-Markovian open quantum systems. Rev. Mod. Phys. 2017, 89, 015001. [Google Scholar] [CrossRef] [Green Version]
- Kampen, N.G.V. Stochastic Processes in Physics and Chemistry; North-Holland Publishing Company: Amsterdam, The Netherlands, 1981. [Google Scholar]
- Cover, T.M.; Thomas, J.A. Elements of Information Theory; Wiley & Sons: Hoboken, NJ, USA, 1991. [Google Scholar]
- Tan, D.; Weber, S.J.; Siddiqi, I.; Mølmer, K.; Murch, K.W. Prediction and Retrodiction for a Continuously Monitored Superconducting Qubit. Phys. Rev. Lett. 2015, 114, 090403. [Google Scholar] [CrossRef]
- Gammelmark, S.; Julsgaard, B.; Mølmer, K. Past Quantum States of a Monitored System. Phys. Rev. Lett. 2013, 111, 160401. [Google Scholar] [CrossRef] [Green Version]
- Yu, S.; Budini, A.A.; Wang, Y.T.; Ke, Z.J.; Meng, Y.; Liu, W.; Li, Z.P.; Li, Q.; Liu, Z.H.; Xu, J.S.; et al. Experimental observation of conditional past-future correlations. Phys. Rev. A 2019, 100, 050301(R). [Google Scholar] [CrossRef]
- Silva, T.L.; Walborn, S.P.; Santon, M.F.; Aguilar, G.H.; Budini, A.A. Detection of quantum non-Markovianity close to the Born-Markov approximation. Phys. Rev. A 2020, 101, 042120. [Google Scholar] [CrossRef]
- Guarnieri, G.; Smirne, A.; Vacchini, B. Quantum regression theorem and non-Markovianity of quantum dynamics. Phys. Rev. A 2014, 90, 022110. [Google Scholar] [CrossRef] [Green Version]
- Apollaro, T.J.G.; Franco, C.D.; Plastina, F.; Paternostro, M. Memory-keeping effects and forgetfulness in the dynamics of a qubit coupled to a spin chain. Phys. Rev. A 2011, 83, 032103. [Google Scholar] [CrossRef] [Green Version]
- Lorenzo, S.; Plastina, F.; Paternostro, M. Tuning non-Markovianity by spin-dynamics control. Phys. Rev. A 2013, 87, 022317. [Google Scholar] [CrossRef] [Green Version]
- Haikka, P.; Goold, J.; McEndoo, S.; Plastina, F.; Maniscalco, S. Non-Markovianity, Loschmidt echo, and criticality: A unified picture. Phys. Rev. A 2012, 85, 060101. [Google Scholar] [CrossRef] [Green Version]
- Mazzola, L.; Rodríguez-Rosario, C.A.; Modi, K.; Paternostro, M. Dynamical role of system-environment correlations in non-Markovian dynamics. Phys. Rev. A 2012, 86, 010102. [Google Scholar] [CrossRef] [Green Version]
- Lipkin, H.J.; Meshkov, N.; Glick, A.J. Validity of many-body approximation methods for a solvable model: (I) Exact solutions and perturbation theory. Nucl. Phys. 1965, 62, 188. [Google Scholar] [CrossRef]
- Vidal, J.; Palacios, G.; Mosseri, R. Entanglement in a second-order quantum phase transition. Phys. Rev. A 2004, 69, 022107. [Google Scholar] [CrossRef] [Green Version]
- Dusuel, S.; Vidal, J. Finite-Size Scaling Exponents of the Lipkin-Meshkov-Glick Model. Phys. Rev. Lett. 2004, 93, 237204. [Google Scholar] [CrossRef] [Green Version]
- Dusuel, S.; Vidal, J. Continuous unitary transformations and finite-size scaling exponents in the Lipkin-Meshkov-Glick model. Phys. Rev. B 2005, 71, 224420. [Google Scholar] [CrossRef] [Green Version]








© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, L.; Zou, J.; Li, H.; Shao, B. Non-Markovianity of a Central Spin Interacting with a Lipkin–Meshkov–Glick Bath via a Conditional Past–Future Correlation. Entropy 2020, 22, 895. https://doi.org/10.3390/e22080895
Han L, Zou J, Li H, Shao B. Non-Markovianity of a Central Spin Interacting with a Lipkin–Meshkov–Glick Bath via a Conditional Past–Future Correlation. Entropy. 2020; 22(8):895. https://doi.org/10.3390/e22080895
Chicago/Turabian StyleHan, Liping, Jian Zou, Hai Li, and Bin Shao. 2020. "Non-Markovianity of a Central Spin Interacting with a Lipkin–Meshkov–Glick Bath via a Conditional Past–Future Correlation" Entropy 22, no. 8: 895. https://doi.org/10.3390/e22080895
APA StyleHan, L., Zou, J., Li, H., & Shao, B. (2020). Non-Markovianity of a Central Spin Interacting with a Lipkin–Meshkov–Glick Bath via a Conditional Past–Future Correlation. Entropy, 22(8), 895. https://doi.org/10.3390/e22080895