To appear in the Proceedings of the 43rd ACM Technical Symposium on Computer Science Education, SIGCSE 2012
Calico: A Multi-Programming-Language, Multi-Context
Framework Designed for Computer Science Education
Douglas Blank1, Jennifer S. Kay2, James B. Marshall3, Keith O'Hara4, and Mark Russo1
1
Computer Science
Department
Bryn Mawr College
Bryn Mawr, PA (USA)
(1) 610-526-6501
dblank@brynmawr.edu
2
3
4
Computer Science
Department
Rowan University
Glassboro, NJ (USA)
(1) 856-256-4593
Computer Science
Department
Sarah Lawrence College
Bronxville, NY (USA)
(1) 914-395-2673
Computer Science
Program
Bard College
Annandale-on-Hudson, NY
(1) 845-752-2359
kay@rowan.edu
jmarshall@slc.edu
kohara@bard.edu
ABSTRACT
The Calico project is a multi-language, multi-context programming framework and learning environment for computing education. This environment is designed to support several interoperable programming languages (including Python, Scheme, and a
visual programming language), a variety of pedagogical contexts
(including scientific visualization, robotics, and art), and an assortment of physical devices (including different educational robotics platforms and a variety of physical sensors). In addition,
the environment is designed to support collaboration and modern,
interactive learning. In this paper we describe the Calico project,
its design and goals, our prototype system, and its current use.
Categories and Subject Descriptors
K.3.2 [Computers and Education]: Computer and Information
Science Education – computer science education.
General Terms
Design, Experimentation, Languages.
Keywords
CS1, computer science education, integrated development environment, IDE, pedagogy, programming languages, robots.
1. INTRODUCTION
Today there are many new and exciting programming environments and contexts available for learning about computing. For
example, Alice [8] and Scratch [10] provide drag-and-drop, nosyntax-errors programming environments, and DrRacket (formerly DrScheme) offers an award-winning integrated error display and logging system for Scheme [11]. Likewise, there are
many exciting pedagogical contexts for learning about computer
science, including media computation [6], story-telling, game
development, AI, robotics, visualization, and art. Unfortunately,
Permission to make digital or hard copies of all or part of this work for
personal or classroom use is granted without fee provided that copies are
not made or distributed for profit or commercial advantage and that
copies bear this notice and the full citation on the first page. To copy
otherwise, or republish, to post on servers or to redistribute to lists,
requires prior specific permission and/or a fee.
SIGCSE’12, February 29–March 3, 2012, Raleigh, North Carolina, USA.
Copyright 2012 ACM 978-1-4503-1098-7/12/02...$10.00.
these contexts are often tied to a specific programming environment, which limits their availability to only those willing to work
in that programming environment. Similarly, picking a specific
programming environment often limits which contexts one can
explore. Ideally, educators should be free to choose the most appropriate programming languages and, independently, the most
appropriate themes and contexts for their courses. The choice of
programming language should not limit the context, nor should
the choice of context limit the programming language.
The Calico project is designed to provide a single framework
for multiple programming environments and multiple contexts so
that instructors and institutions need not limit their pedagogical
choices [3]. Thus, within a single framework, teachers can
smoothly transition students from one programming paradigm to
another. For example, perhaps an instructor would like students to
begin with a Scratch-like language [16] and then move to Python.
Or perhaps the instructor might wish to start with Python and
move to Scheme. Both of these transitions are possible in Calico
without changing the computing context, whether it be art, game
development, visualization, or any number of other possibilities.
Calico comprises four main components: an interface for
multiple programming languages; an interface for multiple libraries for exploring different computing contexts; an interface for
peer-to-peer communication; and an integrated editor. The language interface allows for the execution of individual language
expressions or entire program files, and for the sharing of data and
functions across languages. The library interface enables program
modules to appear as native objects within all of the available
languages. This provides a foundation for exploring computing
contexts, such as graphics and robotics, in a language-independent
manner. The communication interface provides functionality that
enables users to easily exchange information among themselves.
Finally, the editor provides a common framework for editing programs in any language, be it graphical or text-based.
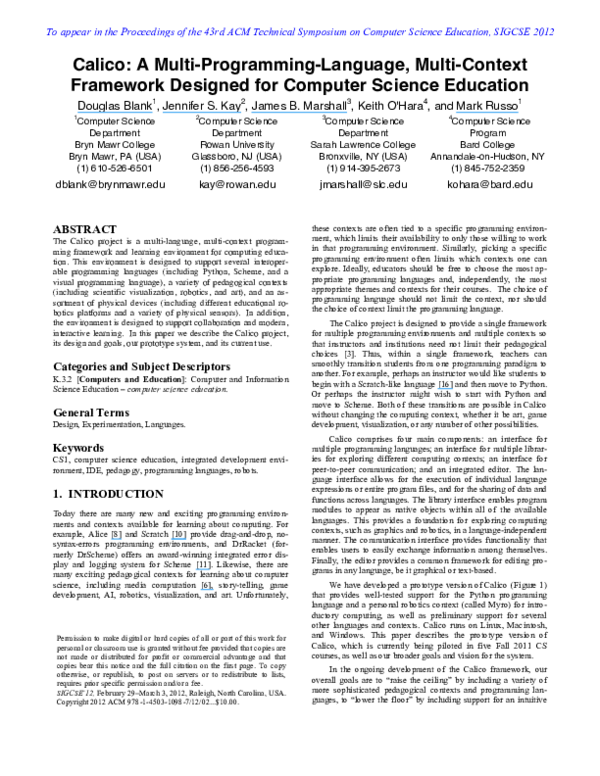
We have developed a prototype version of Calico (Figure 1)
that provides well-tested support for the Python programming
language and a personal robotics context (called Myro) for introductory computing, as well as preliminary support for several
other languages and contexts. Calico runs on Linux, Macintosh,
and Windows. This paper describes the prototype version of
Calico, which is currently being piloted in five Fall 2011 CS
courses, as well as our broader goals and vision for the system.
In the ongoing development of the Calico framework, our
overall goals are to “raise the ceiling” by including a variety of
more sophisticated pedagogical contexts and programming languages, to “lower the floor” by including support for an intuitive
�Figure 1: Prototype of the Calico shell (left) and editor (right).
visual programming language for beginners, and to “widen the
doorway” by including contexts beyond those typically found in
traditional computer science, such as scientific visualization and
art.
As an example, the following Calico Scheme program defines a recursive function for testing whether an integer is even:
scheme> (define is-even?
(lambda (n)
(cond
2. A MULTI-LANGUAGE ENVIRONMENT
Users interact with each supported language through the Calico
Shell. The shell provides a place for text-based language expressions to be entered and evaluated interactively, with the results
available for immediate inspection. In many ways, the shell is
very similar to other interactive interfaces, such as IDLE,
DrRacket, Jython Environment for Students (JES), and many
others going back to the read-eval-print loop of Lisp. However,
Calico offers three significant improvements over these other
interfaces: Calico is completely language-agnostic, users can easily switch between a variety of available languages, and different
languages can share data and functions.
Our Calico prototype currently fully supports Python as a
scripting language for students to use. Beyond support for Python,
there is preliminary support for Ruby, F# (similar to OCaml), Boo
(Python with types), and Scheme. The shell is language-agnostic
in that it is not tied specifically to any programming language.
Languages are dynamically loaded on startup through a simple,
standard interface. Once Calico is started, users may switch between loaded languages through a simple key combination (e.g.,
Control+5 might be Python, and Control+6 Ruby).
Of course, most users will probably only use a single language at a time; however, users can mix data structures and functions from different languages together. Furthermore, the sharing
of data and functions requires no extra overhead. For example,
data need not be “marshaled” (or copied) in order to be accessed
by different languages. In addition, functions defined in one language appear native to each of Calico’s supported languages, even
if they involve very different types of execution mechanisms.
((= n 0) #t)
((= n 1) #f)
((< n 0) (is-even? (- n)))
(else (is-even? (- n 2))))))
Ok
In this example, is-even? is local to Scheme. However, this function can easily be made available to other Calico languages. The
following code adds the function even to the global environment,
turning the Scheme function is-even? into a function callable from
other Calico languages:
scheme> (define! even (func is-even?))
Ok
The user can then dynamically switch to Python, and call the even
function as if it were a native Python function:
python> even(9998)
True
Conversely, functions defined in Python can be utilized by
Scheme programs in a similar fashion. However, an essential
aspect of Calico's Scheme implementation (and most others, as
well) is that it is properly tail-recursive. The effective depth of
Scheme's call stack is limited only by the amount of system memory available, unlike in many other languages, such as Python or
Java, which impose a limit on the maximum depth of the stack.
�Other Calico languages, however, can take advantage of Scheme's
flexibility. For example, the above even function called from
Python will work for arguments of any size, whereas a function
defined in Python equivalent to is-even? will crash for arguments
above a certain size, depending on the depth limit of Python's call
stack, even though the function is tail-recursive. (The argument
9998 shown above, for instance, causes CPython 2.7.2 to crash.)
In fact, whether or not a function is tail-recursive is irrelevant,
since Scheme imposes no limit on the recursion depth either way.
This example shows that Python can directly exploit the power of
Scheme in Calico.
In addition to supporting a variety of different languages,
Calico makes it easy for educators to modify either the syntax or
semantics of a language, or to create a completely new language.
Both of these options have been largely unavailable to educators
in the past. Because a language is a plugin, and is written in the
same manner as any Calico library (discussed below), adding a
new text-based or graphical language is a simple matter of adding
a single file to the system. This file defines what to do when
Calico is asked to evaluate a snippet of code such as an expression
or group of statements, and also what is necessary to run an entire
program file. Additional functionality can also be included if desired, but little else is necessary for the language to appear in
Calico’s menu. To fully integrate the language into Calico, the
system needs to define a method for accessing the global environment that is shared across all languages.
Calico incorporates a layer for language designers called the
Dynamic Language Runtime (DLR). This layer is an open source
set of functions to help designers create programming languages
using modern techniques [4]. Open source versions of Python and
Ruby have already been developed using the DLR. This layer is
also the mechanism that allows Calico’s languages to share data
and functions.
The syntax and semantics of Calico’s version of Python has
been refined for pedagogical purposes. For example, the print
function of Python 3 has been selected over the print statement of
earlier versions, and Python’s new with statement has been included. Of course, these are minor changes, but instructors have
the ability to change any aspect of a language in principle. This
gives instructors fine-grained control over the languages they use,
and frees them from having to rely strictly on the choices made by
language designers. Of course, this could potentially have adverse
effects, by splintering a language into many incompatible versions. On the other hand, this could allow new variations of a
language to emerge that would not otherwise be possible.
2.1 A Visual Programming Language
To demonstrate the flexibility of the Calico system to incorporate
new languages, we are developing a blocks-oriented, drag-anddrop visual programming language for Calico called Jigsaw
(Figure 2). This new language will closely follow the lead of
Scratch [16], a visual programming language primarily for
children from the Lifelong Kindergarten Group at the MIT Media
Lab. Visual programming tools like Scratch have been very
successful at making computer programming accessible to K-12
and undergraduate students [9].
Students will be able to execute a Jigsaw program directly in
the graphical environment with the built-in Jigsaw language interpreter. Alternatively, the system will be able to translate a visual
program into the equivalent source code for several textual lan-
Figure 2: The Jigsaw visual programming environment.
guages integrated into the Calico environment. The translator will
build a bridge from the high-level programming concepts represented by Jigsaw blocks to specific language implementations.
The student will thus be able to see directly how an abstract programming concept can be expressed concretely in multiple ways.
Jigsaw will include block palettes that encapsulate the rich
array of computing contexts available to all Calico programming
languages. Calico’s common environment and shared libraries
will greatly facilitate the integration of new contexts as Jigsaw
block sets, as well as the process of translating a Jigsaw program
to the equivalent source code in multiple textual languages.
Jigsaw will be extended in several ways to further enhance
students’ ability to visualize computer programming. Graphical
extensions to Jigsaw will include interactive design and manipulation of data structures, a stepping debugger with the ability to
inspect and modify multiple levels of execution scope within a
Jigsaw program, and a facility to create and deploy code-yourown blocks for others to use.
Experience has shown that new students often cling tightly to
the syntax of the language that they are learning. So one may not
want to expose introductory students to too many languages at
once. We suspect, however, that starting with a visual programming language and migrating to Python in CS1 would be beneficial to students. This hypothesis can be easily tested with Calico.
3. MULTI-CONTEXT COMPUTING
We consider a context to be a unifying theme used to drive student
motivation. A context should be supported by well-designed curricular materials and libraries, and perhaps also by appropriate
physical devices. Currently Calico supports two contexts: the
Myro robotics library for the Scribbler robot with the IPRE Fluke
extension [2, 14, 17], and a 2D Graphics library with optional
support for physics simulations, including gravity.
A Calico library only needs to be written once, but appears as
if it were implemented for each of the supported languages. For
�example, the Myro library appears as a native Python module
inside Python, as a native Ruby module inside Ruby, and so on.
We have written programs in several languages using Myro commands to control a robot, and have created a number of 2D
graphics demos as well. As an example, the following programs
demonstrate using the Graphics library in four Calico languages:
Python, Scheme, F#, and Ruby.
# Python Graphics Example
import Graphics
win = Graphics.Window("Hello")
line = Line((0,0), (100,100))
line.draw(win)
;; Scheme Graphics Example
(using "Graphics")
(define win (Graphics.Window "Hello"))
(define line (Graphics.Line (Graphics.Point 0 0)
(Graphics.Point 100 100)))
(line.draw win)
// F# Graphics Example
module MyModule
let win = Graphics.Window("Hello")
let line = new Graphics.Line(new Graphics.Point(0,0),
new Graphics.Point(100,100))
line.draw(win)
# Ruby Graphics Example
win = Graphics::WindowClass.new("Hello")
Figure 3: Examples created with Calico’s 2D Graphics library.
line = Graphics::Line.new(Graphics::Point.new(0,0),
Graphics::Point.new(100,100))
line.draw(win)
and-drop Jigsaw language, Calico could also be used as an
alternative to Scratch. Or with its Scheme support, it might serve
as an alternative to NetLogo.
The Graphics library is written once in standard C#, following some basic guidelines, and then compiled on any platform to a
shared library. This shared library is then placed into a folder of
the Calico Project, which makes it available to all of the supported
languages. As can be seen from the above examples, the library
provides a native interface for each language. It is important to
note that there is no additional “glue” or “wrapper” code necessary to use a library. In addition, the library is not dependent upon
the language that is using it, nor the operating system. In this
manner, the compiled library can be used as-is with future languages or operating systems that have not yet been created. This
will greatly facilitate the maintainability of the entire project as
time goes on.
The 2D Graphics library currently has support for basic
drawing functionality, including shapes, turtle graphics, and image processing. In addition, the library also has a selection of
“modes” for top-level windows to operate in. For example, “auto
mode” will automatically update a window’s contents as soon as
possible, but without overloading the system; “manual mode”
leaves the updating of graphics completely under the user’s control; and “physics mode” imbues all shapes with physical properties such as mass and velocity under the influence of gravity.
Physics mode allows for many interesting explorations into topics
typically outside the scope of introductory computer science
courses. For example, students can easily write their own version
of the game “Angry Birds”, using nothing more than standard
graphical shapes and turning on physics mode.
The Myro robot library implements a well-tested API developed by the Institute for Personal Robots in Education (IPRE) [7].
This API has been ported by others to many languages, including
C++, C, and Java. We are currently deploying Calico within a
“robots first” CS1 setting. The 2D Graphics library is designed to
support many different uses. For example, it can serve as a
replacement for Zelle’s Python Tkinter-based graphics library
[18]. Of course, since it is written as a generic Calico library, it is
available to all of the Calico languages, not just Python. We
would also like for it to eventually provide the functionality of
Processing’s 2D graphical library [15]. Combined with the drag-
To augment the Calico 2D Graphics library, we have also included in Calico a set of real world data. For example, we have
included the regions of each US state in longitude/latitude format.
Combining this with some supporting code for mapping longitude/latitude points to a window coordinate system allows students to easily create interesting visualizations. For example, one
can plot the path of an active hurricane, or visualize by state the
percentage of adult smokers (see Figure 3). The top image shows
the path of Hurricane Irene plotted using a Calico function to map
longitude and latitude to (x, y) window coordinates. The bottom
image shows a visualization of the adult smoking population of
�various states. The darker the color of the state, the higher the
percentage of smokers in the state. States are represented by
polygons of longitude/latitude pairs that are drawn using Calico’s
Polygon class. More generally, this library will make it easy for
students to learn to manipulate and experiment with “big data”
within many different contexts, using graphical visualizations as
the primary tool.
One of the main design goals of Calico is the separation of
the pedagogical context from the programming language. This has
the benefit of allowing one group of educators to focus their resources on developing interesting libraries and contexts, independently of other researchers working on language issues. Thus,
the hope is to create many reusable components (languages, libraries, and contexts) that can be easily integrated and maintained
within a single framework.
Calico contexts may also incorporate the use of special
hardware and other devices. Inexpensive sensors and effectors are
increasingly available for use in the classroom. Hardware like
Arduino microcontrollers [1], the Microsoft Kinect camera, and
the iRobot Create robot are relatively inexpensive and allow
students to write programs that interact with the real world. This
physical presence can make students’ programs seem more
relevant and engaging, as they are “authentic” problem domains.
Our goal is to make cutting edge hardware accessible to all levels
of the computing curriculum through Calico’s Devices library.
For example, students using Calico in a creative computation class
will be able to access the depth images provided by the Kinect, or
to drive a Create mobile robot around using a simple, standard
API.
3.1 An IDE for Interaction and Collaboration
Learning a different programming language should not entail
learning a completely different development environment. Too
often, each language comes with its own extra baggage of IDE,
libraries, and supporting framework. Educators should be free to
focus the student’s attention on the ideas that matter, rather than
on getting students up to speed in yet another new, unfamiliar
environment. For example, the fact that Scheme uses functions
and recursion as opposed to loops and mutable state is important;
using the F5 key to run the program as opposed to some other key
or menu option is not important. The Calico IDE has a fast, robust, extensible color syntax highlighter for all available languages, and allows switching between languages with a keystroke.
Students can interactively enter commands in the currently selected language and see the results immediately. Any further
improvements made to the IDE will automatically carry over to all
of Calico’s programming languages and contexts.
In addition to the shell and editor windows, Calico’s interface also has a third component, called Chat. The Chat window
appears as a typical chatroom interface, and uses Extensible Messaging and Presence Protocol (XMPP) as the back-end protocol
for communicating messages between the users’ computers and
the server. The integrated chat interface allows students and
teachers to communicate in a more modern medium. However,
and perhaps more importantly, the XMPP connection can be used
in ways other than as a chat interface. This provides a general
mechanism for moving information between Calico clients. For
example, we are currently exploring what we call “code blasting”.
Using Calico, teachers will have the ability to blast code to students such that it shows up directly in their Calico editors. This
will make it easy for them to immediately try out the examples
being discussed in class. Likewise, students will be able to blast
their assignments to their teachers, or perhaps blast code to each
other. In addition, we have outlined plans to develop further support for interactive collaboration in Calico, so that two students
could work together, even if they are in different locations.
Finally, Calico is designed to incorporate the functionality of
Personal Response Systems (often referred to as “clickers”),
which can be used to provide interactivity in a classroom. Interactivity can be an effective way to enhance learning, even with
larger class sizes. At this stage, we plan on implementing only a
basic “quick poll” functionality. The instructor could initiate a
question on the fly, perhaps with a multiple-choice answer selection, in order to gauge students’ comprehension of a particular
topic. Students would each receive the quick poll via a pop-up
dialog in Calico, where they would select one of the choices.
Afterwards, the instructor could display a bar chart of the group’s
responses, leaving individuals anonymous. The class could then
either discuss the topic further, or move on to the next topic,
depending on overall student understanding.
3.2 Technical Details
Calico is designed to run identically on Linux, Macintosh, and
Windows. In order to satisfy our cross-platform goal, we decided
to implement the system on a virtual machine (VM). We considered two popular virtual machines: Java and .NET. Unfortunately, .NET only runs under Windows. However, an open source
implementation of .NET exists, called Mono, which runs on all
three target operating systems. Like Java, Mono includes both an
object-oriented language/compiler and a virtual machine/runtime.
However, although many languages can run on the Java VM, no
common infrastructure exists, other than the VM itself, for each
language implemented on the VM. This makes it difficult for
different languages to share environments, data structures, objects,
or functions. On the other hand, .NET and Mono have a framework for implementing languages called the Dynamic Language
Runtime (DLR), and there already exist several languages written
for the DLR, including Python and Ruby. The DLR contains
many tools and technologies for implementing languages, along
with support for making languages interoperable. Also, Java
lacks a complete, robust, and official open source implementation.
In contrast, .NET’s Common Language Infrastructure (CLI) has
been clearly defined by Ecma standards #334 and #335 [5], and is
protected by a promise from Microsoft not to sue [12]. The Mono
virtual machine implements the Ecma standards. We have put a
high value on Calico having a complete and open source “stack”
of software layers, and for these reasons we decided to select the
CLI as implemented by Mono as the basis of our system.
Calico is designed to be easy to maintain and modify over
time. The main Calico interface is written in IronPython, which
has the advantage of allowing the interface to be easily altered
without recompiling. For example, one can change Calico’s
menus by simply editing a text file. Those changes are then reflected immediately on all platforms. We also selected Gtk as the
graphical toolkit, as it is very robust and consistent across operating systems and has good documentation. The libraries are written
in C# for speed. However, these libraries require only a single
compilation on each operating system, after which they run identically on all platforms with any of the supported languages.
�4. CONCLUSION
[4] Dynamic Language Runtime. http://dlr.codeplex.com.
Retrieved 9/2/2011.
With Calico, one can pick the operating system, programming
language, and context independently. Working within the Calico
IDE, instructors and students can switch between different programming languages with ease while exploring a given context. Having the IDE and libraries be language-agnostic will make
it easy to incorporate new, yet-to-be-invented languages into the
system without having to reinvent all of the necessary supporting
infrastructure, and without the need for adapting existing contexts
to work with the new languages.
[5] Ecma Standards. http://www.mono-project.com/ECMA.
Retrieved 9/2/2011.
It would be ideal if improvements to one educational IDE—
DrRacket’s Scheme environment, say—could also benefit students using other languages. However, currently each such project
is developed largely in isolation, and it is very difficult to apply
advances in one environment to another. By providing an extensible, common framework spanning many programming languages
and paradigms, enhancements to the environment or to a context
benefit all of the languages, thereby creating a vibrant ecosystem
for pedagogical development.
As another example, computer science students typically
study a variety of programming languages in a comparative manner in a junior-level programming languages course. Calico
would be an excellent tool for side-by-side language comparison
in such a course. But why wait until the junior year? Why not do
this type of side-by-side comparison early in a computing curriculum? If switching languages were as easy as pressing a key,
what pedagogical benefits would that offer the students? We hope
to explore these questions through Calico.
In summary, we hope that Calico will provide a long-term,
robust framework that can be used to create and sustain a community of researchers, educators, and students working together.
5. ACKNOWLEDGMENTS
An early version of this project was funded by NSF DUE grant
#0920539 (Blank and O’Hara). Initial funding for the Myro
project was provided for Blank and O’Hara by Microsoft
Research. We would also like to thank Deepak Kumar for his
support on this project. Finally, we would like to acknowledge the
six institutions currently testing Calico: Bard College, Boston
College, Bryn Mawr College, the Baldwin School, Macalester
College, and Rowan University.
6. REFERENCES
[1] Banzi, M. 2008. Getting Started with Arduino. O’Reilly
Media / Make. December 2008.
[2] Blank, D. 2006. Robots make computer science personal.
Communications of the ACM 49, 12, 25-27.
[3] Calico Project Home Page. http://calicoproject.org.
Retrieved 9/2/2011.
View publication stats
[6] Guzdial, M. 2003. A media computation course for nonmajors. In Proceedings of the 8th Annual Conference on
Innovation and Technology in Computer Science Education.
ITiCSE ’03. ACM, New York, NY, 104-108.
[7] Institute for Personal Robots in Education.
http://roboteducation.org. Retrieved 9/2/2011.
[8] Kelleher, C., Pausch, R., and Kiesler, S. 2007. Storytelling
Alice motivates middle school girls to learn computer
programming. In Proceedings of the SIGCHI Conference on
Human Factors in Computing Systems. CHI '07. ACM, New
York, NY, 1455-1464.
[9] Malan, D. and Leitner, H. 2007. Scratch for budding
computer scientists. SIGCSE Bulletin (39) 1, 223-227.
[10] Maloney, J., Resnick, M., Rusk, N., Silverman, B., and
Eastmond, E. 2010. The Scratch programming language and
environment. Transactions on Computing Education 10, 4,
Article 16 (Nov. 2010).
[11] Marceau, G., Fisler, K., and Krishnamurthi, S. 2011.
Measuring the effectiveness of error messages designed for
novice programmers. In Proceedings of the 42nd ACM
Technical Symposium on Computer Science Education.
SIGCSE ’11. ACM, New York, NY, 499-504.
[12] Microsoft Community Promise. 2007.
http://www.microsoft.com/interop/cp. Retrieved 5/17/2011.
[13] NSF. 2003. Beyond LEGOs: Hardware, Software, and
Curriculum for the Next Generation Robot Laboratory. NSF
CCLI award #0231363.
[14] NSF. 2009. Personal Robots for CS1: Next Steps for an
Engaging Pedagogical Framework. NSF CCLI award
#0920539.
[15] Reas, C., Fry, B., and Maeda, J. 2007. Processing: A
Programming Handbook for Visual Designers and Artists.
MIT Press.
[16] Resnick, M., Maloney, J., Monroy-Hernandez, A., Rusk, M.,
Eastmond, E., Brennan, K., Millner, A., Rosenbaum, E.,
Silver, J., Silverman, B., and Kafai, Y. 2009. Scratch:
programming for all. Communications of the ACM vol. 52
no. 11 (Nov. 2009), 60-67.
[17] Summet, J., Kumar, D., O’Hara, K., Walker, D., Ni, L.,
Blank, D., and Balch, T. 2009. Personalizing CS1 with
robots. In Proceedings of the 40th ACM Technical
Symposium on Computer Science Education. SIGCSE ’09.
ACM, New York, NY, 433-437.
[18] Zelle, J. 2003. Python Programming: An Introduction to
Computer Science. Franklin, Beedle, and Associates.
�
 Douglas Blank
Douglas Blank