CloudETL: Scalable Dimensional ETL for Hive
∗
Christian Thomsen
Torben Bach Pedersen
University of Waterloo
Aalborg University
Aalborg University
xiufeng.liu@uwaterloo.ca
chr@cs.aau.dk
tbp@cs.aau.dk
Xiufeng Liu
ABSTRACT
Keywords
Extract-Transform-Load (ETL) programs process data into data
warehouses (DWs). Rapidly growing data volumes demand systems that scale out. Recently, much attention has been given to
MapReduce for parallel handling of massive data sets in cloud environments. Hive is the most widely used RDBMS-like system for
DWs on MapReduce and provides scalable analytics. It is, however, challenging to do proper dimensional ETL processing with
Hive; e.g., the concept of slowly changing dimensions (SCDs) is
not supported (and due to lacking support for UPDATEs, SCDs are
complex to handle manually). Also the powerful Pig platform for
data processing on MapReduce does not support such dimensional
ETL processing. To remedy this, we present the ETL framework
CloudETL which uses Hadoop to parallelize ETL execution and to
process data into Hive. The user defines the ETL process by means
of high-level constructs and transformations and does not have to
worry about technical MapReduce details. CloudETL supports different dimensional concepts such as star schemas and SCDs. We
present how CloudETL works and uses different performance optimizations including a purpose-specific data placement policy to colocate data. Further, we present a performance study and compare
with other cloud-enabled systems. The results show that CloudETL
scales very well and outperforms the dimensional ETL capabilities
of Hive both with respect to performance and programmer productivity. For example, Hive uses 3.9 times as long to load an SCD
in an experiment and needs 112 statements while CloudETL only
needs 4.
ETL, MapReduce, Hive
1. INTRODUCTION
In data warehousing, data from different source systems is processed into a central DW by an Extract–Transform–Load (ETL)
process in a periodic manner. Traditionally, the DW is implemented
in a relational database where the data is stored in fact tables and
dimension tables which form a star schema [15]. Many enterprises
collect and analyze hundreds of gigabytes data each day and there
is an increasing need for a new data warehousing architecture that
can achieve better scalability and efficiency. With the emergence
of cloud computing technologies, such as MapReduce [5], many
enterprises have shifted away from deploying their analytical systems on high-end proprietary machines and instead moved towards
clusters of cheaper commodity machines [1]. The system Hive [26]
uses the Hadoop [10] MapReduce implementation and can be used
for scalable data warehousing. Hive stores data in the Hadoop Distributed File System (HDFS), and presents the data by logical tables. The data in the tables is queried by user-written (SQL-like)
HiveQL scripts which are translated into MapReduce jobs to process the data. While Hive offers many of the standard functions and
operators known from SQL and can read data from a variety of formats, it only has limited dimensional ETL capabilities. It is more
like a DBMS and less like an ETL tool. Hive can be (and is) used
for easy, simple ETL processing, but for more complex scenarios,
it is not an appropriate tool. For example, Hive lacks support for
high-level ETL-specific constructs including those for looking up
a dimension member or, if not found, updating the dimension table. There is also no specialized support for SCDs [15]. Writing
HiveQL scripts for such processing is cumbersome and requires a
lot of programming efforts [18]. In addition, Hive also lacks support for UPDATEs which makes manual handling of SCDs even
more complicated when time-valued attributes are used to track the
changes of dimension values. SCDs are very commonly used in
traditional, RDMBS-based DWs, but are hardly used in Hive due
to the described complexity. Pig [19] is a strong tool for processing
and transforming data in Hadoop, but also with Pig, the problem
remains and dimensional ETL processing is cumbersome and requires much programming as discussed in previous work [18].
In this paper, we present CloudETL which is a scalable dimensional ETL framework for Hive. CloudETL supports the aforementioned ETL constructs including SCDs. CloudETL sits on top
of Hive and aims at making it easier and faster to create scalable
and efficient ETL processes that load data into Hive DWs. CloudETL allows ETL programmers to easily translate a high-level ETL
design into actual MapReduce jobs on Hadoop by only using highlevel constructs in a Java program and without handling MapRe-
Categories and Subject Descriptors
H.2.7 [Database Management]: Database Administration—Data
warehouse and repository; D.1.3 [Programming Techniques]: Concurrent Programming—Parallel programming
General Terms
Algorithms, Experimentation
∗The work was done while this author was at Aalborg University
Permission to make digital or hard copies of all or part of this work for personal or
classroom use is granted without fee provided that copies are not made or distributed
for profit or commercial advantage and that copies bear this notice and the full citation
on the first page. Copyrights for components of this work owned by others than the
author(s) must be honored. Abstracting with credit is permitted. To copy otherwise, or
republish, to post on servers or to redistribute to lists, requires prior specific permission
and/or a fee. Request permissions from Permissions@acm.org.
IDEAS ’14, July 07 - 09 2014, Porto, Portugal
Copyright is held by the owner/author(s). Publication rights licensed to ACM.
ACM 978-1-4503-2627-8/14/07...$15.00.
http://dx.doi.org/10.1145/2628194.2628249
195
�duce details. The framework will even use map-only jobs when
possible and avoid costly shuffling. We provide a library of commonly used ETL constructs as building blocks. All the complexity associated with parallel programming is transparent to the user,
and the programmer only needs to think about how to apply the
constructs to a given DW schema leading to high programmer productivity, fast performance, and very good scalability.
The contributions of this paper are as follows: First, we present
a novel and scalable dimensional ETL framework which provides
direct support for high-level ETL constructs, including handling of
star schemas and SCDs. Second, we present a method for processing SCDs enabling update capabilities in a cloud environment.
Third, we present how to process big dimensions efficiently through
purpose-specific co-location of files on the distributed file system,
and we present in-map updates to optimize dimension processing.
Fourth, we present lookup indices and multi-way lookups for processing fact data efficiently in parallel. Fifth, we provide an extensible set of high-level transformations to simplify the implementation
of a parallel, dimensional ETL program for a MapReduce environment. Finally, we provide an extensive experimental evaluation of
the proposed techniques. CloudETL does thus make it easy for the
ETL programmer to efficiently create scalable ETL flows by using
dimensional constructs.
The rest of the paper is structured as follows. In Section 2, we
give an overview of CloudETL and its components and introduce
a running example. In Section 3, we detail dimension processing including the parallelization for multiple dimension tables, colocation of data, and the updates for SCDs. In Section 4, we present
the approach for processing facts. In Section 5, we describe the
implementation of CloudETL. In Section 6, we study the performance CloudETL and compare with other systems. In Section 7,
we present the related work. Finally, in Section 8, we summarize
the paper and discuss the future research directions.
ure 1) as processing facts requires looking up referenced primary
key values from the dimension tables.
Hive employs HDFS for physical data storage but presents data
in HDFS files as logical tables. We can thus easily write data directly into files which then can be used by Hive. The right-most
part of Figure 1 shows a star schema in Hive which consists of four
(or more) files in HDFS.
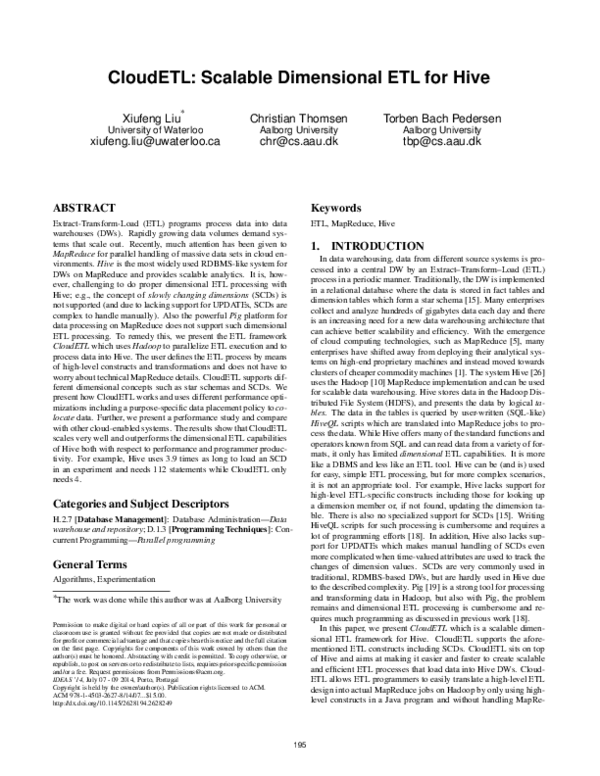
Running Example We use a running example to show how CloudETL processes data into dimension tables and fact tables. The example is inspired by a previous project [22]. It considers a DW
with data about tests of web pages. The star schema in Figure 2
has a fact table testresultsfact with the measure errors
telling how many errors were detected on a given version of a web
page on a given date. There are three dimension tables, testdim,
pagedim, and datedim, representing tests, web pages, and dates,
respectively.
Note that pagedim is a so-called type-2
SCD [15]. meaning that it tracks changes of attribute values (e.g.,
the size of a page) by having multiple versions of its dimension
values (i.e., in the dimension table, there are multiple rows for a
single dimension member to represent the different versions). To
track the different versions, there is a version attribute representing the version number and validfrom and validto attributes
with dates representing when a given version was valid. Note that
validto typically is NULL (i.e., unknown) for a new version v
and is updated later on when v is succeeded by another version.
Later in the paper, we also consider a type-1 SCD where a changed
attribute value simply is overwritten with the new value. pagedim
is also a data-intensive dimension table with many more rows than
the other two dimension tables. We use this example, instead of a
more common one (e.g., TPC-H [27]), because it has an SCD and
a data-intensive dimension and thus allows us to illustrate and test
CloudETL more comprehensively.
2. SYSTEM OVERVIEW
CloudETL employs Hadoop as the ETL execution platform and
Hive as the warehouse system (see Figure 1). CloudETL has a
number of components, including the application programming interfaces (APIs) used by the user’s ETL programs, ETL transformers
performing data transformations, and a job manager that controls
the execution of the jobs to submit to Hadoop.
Figure 2: Star schema for the running example
3.
3.1
DIMENSION PROCESSING
Challenges and Designs
In conventional ETL processing, many transformation capabilities rely on the underlying DW DBMS to, e.g., automatically generate sequential key values, perform SCD updates, and insert rows
into dimension tables and fact tables. However, support for all these
is not available in Hive and Hadoop, and in particular, Hive and
other MapReduce-based programs for data analysis do not support
the UPDATE operation known from SQL. In addition, a number of
limitations make the ETL on Hadoop more challenging. For example, the nodes running the MR jobs share no global state, which
makes certain tasks (such as handling different dimension value
versions correctly) more difficult for an ETL process, and Hadoop
does not hold schema information for the data to process, which
makes data cleansing difficult.
We address these limitations with the following design which is
explained further in the following sections: First, a line read from
Figure 1: CloudETL Architecture
There are two sequential steps in CloudETL’s workflow: dimension processing and fact processing. The source data must
be present in HDFS (including but not limited to Hive files) when
the MapReduce (MR) jobs are started (see the left of Figure 1).
CloudETL allows processing of data into multiple tables within a
job. The source data is processed into dimension values or facts by
user-specified transformations executed by mappers and reducers.
A transformer integrates a number of transformations processing
data, such as conversions, lookups (for getting dimension key values), etc. CloudETL’s job manager submits jobs to Hadoop’s JobTracker in sequential order. The jobs for dimension processing are
to be run before the jobs for fact processing (see the middle of Fig-
196
�values. We thus include both the business key and the SCD date
(or another sorting attribute) in the key of the map output (this is an
application of the value-to-key MapReduce design pattern [16]). In
addition, we make a task support processing of multiple dimension
tables by tagging the key-value pairs with the name of the dimension table to which the data will be written. Therefore, the map
output has the format (h the name of a dimension table, business
key, SCD date/line no. i, h the rest of dimension valuesi) where the
key is composite of three attributes.
To make the above more concrete, we in Figure 4 show the input and output of map and reduce when processing pagedim. We
assume that a single dimension value has already been loaded into
Hive, and now we perform incremental loading with two new values. As shown in Figure 4, the map input consists of both incremental data and existing dimension data. We discuss an optimization in Section 3.5. A record from the incremental data has the
attributes url, size, and moddate which for a web page represent its address, size (may change when the page is modified)
and modification date, respectively. The existing dimension record
contains the additional SCD attributes version, validfrom,
and validto. In the mapper, we transform the raw incremental
data into dimension values by adding the additional SCD attributes
and the surrogate key id. Then, the mapper emits the records in the
described format. For the existing dimension record, no transformation is needed, but the record is re-structured in line with the map
output format. This results in the shown map output. When the map
output is shuffled to the reducers, the key-value pairs are grouped
by the composite key values and sorted by the validity SCD date in
ascending order (see the reduce input in Figure 4). In the reducer,
unique numbers are assigned to the key attribute, id, of the two
new dimension values and the values of the SCD attributes are updated, i.e., validto of a version is updated to the starting valid
date of the following version (see validfrom and validto of
the different versions for url=www.dom.com/p0.htm). The
version number is also updated accordingly. The three records are
finally written to HDFS; null in the validto attribute represents
that a dimension record is valid till now (see the reduce output in
Figure 4).
the data source is made into a record which migrates from mappers to reducers. A record contains schema information about the
line, i.e., the names of attributes and the data types. For example, a record with pagedim data has the schema hurl string,
size int, moddate datei. Example attribute values are
hwww.dom.com/p0.htm, 10, 2012-02-01i. Second, to
correctly maintain an SCD, we union the incremental data (i.e., the
new data to add to the DW such as new test results of new pages)
with the existing dimension data that has already been processed
into a dimension table, and replace the attribute values for both
when necessary. Third, we assign each new row a unique, sequential key value.
3.2
Execution Flow
Figure 3 shows the execution flow for dimension processing.
Here, we only show the ith reducer which processes a part of the
intermediate data output by all mappers. The source data in HDFS
is split by Hadoop and assigned to the map tasks. The records from
a file split are processed by user-specified transformations in the
mappers. A mapper can process source data that will go to different
dimensions. In the shuffling, the data is sent to different reducers.
The reducer output (corresponding to a dimension table) is written
to the HDFS.
Figure 3: Execution flow of dimension processing
We now describe how to process changes by using the pagedim
dimension as an example. All dimensions are considered to be
SCDs, but if there are no changes in the source data, the dimensions will of course not be updated. The main problem of processing SCDs is how to update the special SCD type-2 attribute values
(with validity dates and version numbers) in a MapReduce environment. For type-2 SCDs, the validity dates and version numbers are
updated by following the original change order in the source data.
For example, the end date of a given version is set to the start date of
its successor. For type-1 SCDs, the attribute values of a dimension
member are overwritten by new values. When doing incremental
loading, we also need to update the versions that have already been
loaded into Hive. The idea here is to collect different versions of
dimension values from both the incremental data and the existing
dimension data, and perform the updates in reducers. Therefore,
the execution flow is as follows: Do the transformations on the incremental data in mappers and then hash partition on the business
keys (a dimension must have a key that distinguishes its members)
of the map output. For example, we partition the map output for
pagedim based on the values of the business key url. Rows with
identical key values are then shuffled to the same reducer. To acquire the original change order, we sort the intermediate data by
the modification date. For example, moddate of the pagedim
source data tells when a given page was changed. If the source data
does not include a date, we assume that the line numbers show the
changing order (line numbers should be explicitly given in input
data if it is made up of several files). Alternatively, the user can
choose another attribute to get the change order from.
In any case, we include the sorting attribute(s) in the key of the
map output since Hadoop only supports sorting on keys, but not on
3.3
Algorithm Design
Listing 1 Mapper
1: class Mapper
2:
method INITIALIZE( )
3:
Γ ← GET T RANSFORMATIONS ()
4:
method MAP(offset o, Record r)
5:
for all t ∈ Γ do
6:
r ← t.PROCESS R ECORD(r)
⊲ Returns ⊥ if r is filtered out.
7:
if r = ⊥ then return
⊲ Do nothing
8:
else
9:
key ← CREATE C OMPOSITE K EY(r, t.targetDimension)
10:
value ← CREATE VALUE(r, t.targetDimension)
11:
EMIT (key, value)
12: �
Listing 1 shows pseudocode for the mapper. In the code, Γ is
a sequence of transformations to apply as defined by the user. A
transformation can thus be followed by other transformations. The
first transformation defines the schematic information of the data
source such as the names of attributes, the data types, and the attributes for sorting of versions (such as a date).
Listing 2 shows the reducer code (in Section 3.5, we present a
specialized map-only method for big dimensions). The input is
automatically grouped by the composite key values and sorted (by
the validity date or line no.) before it is fed to the REDUCE method.
197
�Figure 4: MapReduce input and output when processing the type-2 SCD pagedim.
3.4
The REDUCE method reads all the dimension data with a particular
composite key value. Further, CloudETL uses its own partitioning
function such that all data with a given business key is processed
by the same reducer.
For type-2 SCDs (lines 4–13), we keep the dimension values
temporarily in a buffer (lines 5–10), assign a sequential number to
the key of a new dimension record (line 9), and update the SCD
attribute values (line 11), including the validity dates and the version number. The method MAKE D IMENSION R ECORD extracts the
dimension’s business key from the composite key given to the mapper and combines it with the remaining values. Finally, we write the
reduce output with the name of the dimension table as the key, and
the dimension data as the value (line 12). The reduce output format
is customized so that the value is written into the directory named
by the output key value. For type-1 SCDs (lines 14–21), we overwrite the old values. That is, we only keep the latest version with a
given business key value. An important point here is that if r0 has
a primary key value set (here denoted r0 [id]), the data in r0 comes
from the existing table and the primary key value should be reused
(line 18). If the primary key value is not set in r0 , we are handling
an entirely new member and should get a new primary key value.
Pre-update in Mappers
In Hadoop, it is relatively time-consuming to write map output to
disk and transfer the intermediate data from mappers to reducers.
For type-1 SCDs, we thus do pre-updates in mappers to improve
the efficiency by shrinking the size of the intermediate data shuffled to the reducers. This is done by only transferring the resulting
dimension member (which may have been updated several times)
from the mapper to the reducer. On the reduce side, we then do
post-updates to update the dimension to represent the dimension
member correctly.
Listing 3 Pre-update in mappers for type-1 SCDs
1: class Mapper
2:
method INITIALIZE( )
3:
M ← new H ASH M AP ()
4:
method MAP(offset o, Record r)
5:
[Perform transformations...]
6:
k ← G ET B USINESS K EY(r)
7:
prev ← M [k]
8:
if prev 6= ∅and (prev[scddate] < r[scddate]) then
9:
r[id] ← prev[id]
⊲ Preserve id of the existing dimension
10:
M [k] ← r
⊲ Update the old attribute values
11:
method CLOSE( )
12:
for all m ∈ M do
13:
key ← CREATE C OMPOSITE K EY(m)
14:
value ← CREATE VALUE(m)
15:
EMIT (key, value)
16: �
Listing 2 Reducer
1: class Reducer
2:
method REDUCE(CompositeKey key, values[0...n])
3:
name ← GET NAME O F D IMENSION TABLE (key)
4:
if DIM T YPE(name) = type2SCD then
5:
L ← new L IST()
6:
for i ← 0, n do
7:
r ← MAKE D IMENSION R ECORD(key, values[i])
8:
if r[id] = ⊥ then
⊲ id is the dimension key
9:
r[id] ← GET D IMENSION ID(name)
10:
L.ADD(r)
11:
UPDATE SCDATTRIBUTE VALUES (L)
12:
for all r ∈ L do
13:
EMIT (name, r)
14:
else ⊲ Type-1: key value from the 1st record and the rest from the last
15:
r0 ← MAKE D IMENSION R ECORD(key, values[0])
16:
rn ← MAKE D IMENSION R ECORD(key, values[n])
17:
if r0 [id] 6= ⊥ then
18:
rn [id] ← r0 [id]
19:
else
20:
rn [id] ← GET D IMENSION ID(name)
21:
EMIT (name, rn )
22: �
Listing 3 shows how pre-updates for type-1 SCDs are handled.
For simplicity, we do not show the ETL transformation operations
in the algorithm. In the map initialization (line 3), we create a hash
map M to cache the mappings of business key values to the corresponding dimension values. Since the state of M is preserved during the multiple calls to the MAP method, we can use M until the
entire map task finishes when it has processed its split (Hadoop’s
default split size is 64MB). In the mapper, the dimension attribute
values are always updated to the latest version’s if there are any
changes (lines 6–10). We must preserve the key value (i.e., the
value of id) if the member is already represented, but update the
other attribute values (lines 9 and 10). The construction and emission of the composite key-value pairs are deferred to the CLOSE
method which is called when the mapper has finished processing a
split.
With the pre-updates, we can decrease the size of the intermediate data transferred over the network, which is particularly useful
for data with frequent changes. Of course, we can also do the up-
198
�dates in a combiner. However, doing pre-updates in a combiner
would typically be more expensive since we have to transfer the
intermediate data from the mapper to the combiner, which involves
object creation and destruction, and object serialization and deserialization if the in-memory buffer is not big enough to hold the
intermediate data.
3.5
The block placement policy used by CloudETL is shown in Listing 4. In CloudETL, we (unlike CoHadoop) co-locate the files
based on their names, i.e., the files whose names match the same
regular expression are co-located. The regular expressions are defined in a configuration file on the name node. For example, if
we define the regular expression (.*\.page1), the data blocks
of the existing dimension data files and the partitioned incremental
files with the name extension .page1 are placed together. When
the name node starts up, a hash dictionary, M , is created to hold
mappings from a data node to information about the blocks on the
node, i.e., the total number of blocks of the files whose names
match a regular expression (lines 2–12). When an HDFS client
writes a block, it first asks the name node to choose target data
nodes for the block and its replicas. The name node checks if
the name of the file matches the regular expression. If the name
matches, the name node chooses the targets based on the statistics in M . If M is empty, the client is writing the first block of
co-located data and the name node chooses the targets by the default policy and updates M (lines 28–31). If M is non-empty, the
name node chooses the targets based on the existing co-located data
blocks in HDFS. The name node selects a data node for each replica
to store. As in CoHadoop, the data nodes with the highest number
of blocks and with enough space are selected (this is done by sorting M by its values, adding the nodes into a queue Q, and checking
the nodes in an descending order, see line 17–22). When all the
nodes in Q have been checked, but fewer data nodes than needed
have been selected, the name node chooses the remaining nodes
randomly. Each of the chosen nodes is tested to see if it meets the
selection criteria and has sufficient space (lines 23–27). If the file
name does not match the regular expression, the file should not be
co-located with anything and the name node uses the default policy
of HDFS to choose the targets (lines 33).
Processing of Big Dimensions
Typically, the size of dimension data is relatively small compared
to the fact data and can be efficiently processed by the method we
discussed above. This is the case for datedim and testdim
of the running example. However, some dimensions – such as
pagedim – are very big and have much more data than typical
dimensions. In this case, shuffling a large amount of data from
mappers to reducers is not efficient. We now present a method that
processes data for a big dimension in a map-only job. The method
makes use of data locality in HDFS and is inspired by the general
ideas of CoHadoop [9], but is in CloudETL automated and made
purpose-specific for dimensional data processing. We illustrate it
by the example in Figure 5. Consider an incremental load of the
pagedim dimension and assume that the previous load resulted in
three dimension data files, D1 , D2 , and D3 , each of which is the
output of a task. The files reside in the three data nodes node1,
node2, and node3, respectively (see the left of Figure 5). For the
incremental load, we assume the incremental data is partitioned on
the business key values using the same partitioning function as in
the previous load. Suppose that the partitioning has resulted in two
partitioned files, S1 and S3 . The hash values of the business keys in
D1 and S1 are congruent modulo the number of partitions and the
same holds for D3 and S3 . When S1 and S3 are created in HDFS,
data co-location is applied to them, i.e., S1 is placed together with
D1 and D3 is placed together with S3 (see the right of Figure 5).
Then, a map-only job is run to process the co-located data on each
node locally. In this example, note that no incremental data is colocated with D2 . The existing dimension data in D2 is not read or
updated during the incremental load.
Listing 4 Choosing targets in the block placement policy
1: class BlockPlacementPolicy
2:
method INITIALIZE( )
3:
M ← new HASH M AP ()
4:
regex ← GET F ILE NAME R EGEX F ROM C ONFIG ()
5:
n ← GET R EPLICA N UM F ROM C ONFIG ()
6:
F ← GET F ILES F ROM NAME S YSTEM (regex)
⊲ Get matching files
7:
for all f ∈ F do
8:
B ← G ET B LOCKS F ROM B LOCK M ANAGER (f )
9:
for all b ∈ B do
10:
D ←G ET DATANODES (b)
11:
for all d ∈ D do
12:
M [d] ← M [d] + 1
13:
method CHOOSE TARGETS(String f ilename)
14:
D ←new C OLLECTION ()
15:
if regex.MATCHES (f ilename) then
16:
if SIZE (M ) > 0 then
17:
Q ← GET DATANODES (M )
⊲ Sorted desc. by no. of blocks.
18:
while SIZE (Q) > 0 and SIZE (D) < n do
19:
d ← Q.POP ()
20:
if IS G OOD TARGET (d) then
21:
D.ADD (d)
22:
M [d] ← M [d] + 1
23:
while SIZE (D) < n do
24:
d ← CHOOSE R ANDOM ()
25:
if IS G OOD TARGET (d) then
26:
D.ADD (d)
27:
M [d] ← M [d] + 1
28:
else
29:
D ← CHOOSE TARGETS B Y D EFAULT P OLICY (f ilename)
30:
for all d ∈ D do
31:
M [d] ← M [d] + 1
32:
else
33:
D ← CHOOSE TARGETS B Y D EFAULT P OLICY (f ilename)
34:
return D
35: �
Figure 5: Co-location of files in HDFS
Figure 6: Data blocks of co-location (repl. factor = 1)
Figure 6 shows how blocks of co-located files are handled (for
simplicity, we show the blocks when the replication factor is 1).
All blocks of co-located files are placed on the same data node. For
example, the blocks of D1 (d11 , d12 , and d13 ) and the blocks of
S1 (s11 and s12 ) are on node1. If the replication factor is different
from 1, the block replicas of the co-located files are also co-located
on other nodes.
Since Hadoop 0.21.0, users can use their own block placement
policy by setting the configuration property “dfs.block.replicator.
classname”. This does not require re-compiling Hadoop or HDFS.
199
�Figure 8: Lookup indices for the pagedim dimension
structures of lookup indices for type-2 and type-1 SCDs are shown
in Figure 8. As a type-2 SCD index needs to keep track of the
changes of the dimension, the index maps a business key value to
all the versions that share that business key value. The result is
thus a list of key-value pairs with the format h SCD effective date,
dimension keyi in descending order such that the newest version
is the first item to be retrieved by a lookup operation. Given the
business key www.dom.com/p0.htm and the date 20110301,
we can thus find the surrogate key value of the correct dimension
member version by first using the hash dictionary and then getting
the first element from the resulting list. For type-1 SCDs, only the
first step is needed (see the lower part in Figure 8).
In dimension processing, a lookup index file is generated for the
incremental data for each dimension table. It is stored as a Hadoop
sequence file and maps from business-key values to dimension-key
values. The lookup index is distributed and kept in each node permanently (for handling of big dimensions, see Section 4.3).
Figure 7: Type-2 SCD updates in mapper for D1 and S1
CloudETL also offers a program for partitioning data. It runs
a MR job to partition the data into a number of HDFS files based
on a user-specified business key. Data with the same business key
value is written into the same file and sorted by SCD attribute values. For example, before loading pagedim, we can partition the
incremental source data on url and sort it on moddate if it is not
partitioned.
As a partitioned file and its co-located existing dimension data
file both are sorted, we can simply run a map-only job to merge
the data from the two co-located files (the blocks of a resulting
file will also be stored together). Figure 7 illustrates the processing of pagedim on node1 which contains the co-located files
D1 and S1 . The lines from S1 (in the blocks s11 and s12 ) are
first processed by user-specified transformations. We then merge
them with the lines from the existing dimension data file D1 (in the
blocks d11 , d12 and d13 ). The SCD updates are performed during
the merging, and the final dimension values are written to HDFS.
As explained above, it can, however, happen that the incremental data does not get totally co-located with the existing dimension
data, e.g., if a data node lacks free space. In that case, a reduce-side
update should be used.
4.2
Listing 5 Map for fact processing and lookup
1: class Mapper
2:
method INITIALIZE( )
3:
f ← GET C URRENT FACT TABLE ()
4:
D ← GET T HE R EFERENCED D IMENSIONS (f )
5:
for all d ∈ D do
6:
if LKI[d] = ∅ then
7:
LKI[d] ← Read the lookup index of d from local file system
8:
method MAP(offset o, Record r)
9:
r ← TRANSFORM(r)
10:
for all d ∈ D do
11:
r[d.key] ← LOOKUP(d, r)
12:
EMIT (f, r)
13:
method LOOKUP(Dimension d, Record r)
14:
bk ← r[d.businesskey]
15:
if d.type = type2SCD then
16:
sd ← r[d.scdDate]
17:
V ←LKI[d][bk]
⊲ Get versions by the business key bk
18:
for all v ∈ V do
19:
if sd > v.date then
20:
return v.id
21:
else
22:
return LKI[d][bk]
23: �
4. FACT PROCESSING
Fact processing is the second step in the ETL flow in CloudETL.
It involves reading and transforming1 source data and then retrieving surrogate key values from the referenced dimension tables. We
call this operation lookup. Hive, however, does not support fast
lookups from its tables. In addition, the size of the fact data is typically very large, several orders of magnitude larger than the size of
the dimension data. It is, thus, very important to support efficient
fact processing. Therefore we use multi-way lookups to retrieve the
dimension key values through so-called lookup indices and exploit
a map-only job to process the fact data.
4.1
Multi-way Lookups
We now describe how the lookup indices are used during the fact
processing (see Listing 5).
Lookup Indices
We run a map-only job to process the fact data. We thus avoid
the sorting and shuffling as well as the reduce step and get better
efficiency. In the map initialization, the lookup indices relevant to
the fact data are read into main memory (lines 2–7). The mapper
first does all data transformations (line 9). This is similar to the
dimension processing. Then, the mapper does multi-way lookups
to get dimension key values from the lookup indices (lines 10–11).
Finally, the mapper writes the map output with the name of the
fact table as the key, and the record (a processed fact) as the value
A lookup index (which is generated as a side activity during dimension processing) contains the minimal information needed for
doing lookups, including the business key values, the dimension
key values, and the SCD dates for type-2 SCDs. The data of lookup
indices is read into main memory in the map initialization. The
1
The current prototype does transformations only in the mappers,
but this could be extended to also allow aggregating transformations in the reducers.
200
�name is created in HDFS. CloudETL can insert data into a table by
simply adding files to its folder.
We now describe the input. As discussed in Section 3, processing SCDs requires updating both existing and incremental data and
the input consists of both the incremental data and the existing dimension data. The existing data files of a dimension table are in a
folder in the HDFS. When a dimension-processing job starts, the
existing data files are first moved into a temporary directory. Moving files between folders only needs to update the meta-data in the
name node. The job then processes the data in the temporary folder
and the incremental files. When the job has finished, the new output is written and the temporary folder and its files are removed.
If the job does not finish successfully, CloudETL does a rollback
simply by moving the files back to their original folder.
In fact processing, no update is done on existing fact data. The
incremental fact data files are just added to the directory of the fact
table.
Figure 9: Fact processing with partitioned lookup index
(line 12). The record is directly written to the directory in HDFS
(named by the key of map output) using a customized record writer.
Note that all mappers can work in parallel on different parts of the
fact data since the lookup indices are distributed.
We now give more details about the lookup operator in the algorithm (lines 13–22). If it is a lookup in a type-2 SCD, we first get all
the versions from the SCD index by the business key, bk (line 17).
Recall that different versions are sorted by the SCD effective dates
in descending order. We get the correct version by comparing the
effective date of a version and the SCD date sd (lines 18–20). For
the lookup index of a type-1 SCD table, the dimension key value is
returned directly through a hash lookup operation (line 22).
4.3
5.2
An ETL Program Example
We now show how to use CloudETL to easily implement a parallel dimensional ETL program. The code in Figure 10 shows how to
process the pagedim SCD. The implementation consists of four
steps: 1) define the data source, 2) setup the transformations, 3)
define the target table, and 4) add the sequence of transformations
to the job manager and start. When the data source is defined, the
schema information, the business key, and the date attribute to use
in SCD processing are specified (lines 1–5). CloudETL provides
some commonly used transformations (and the user can easily implement others) and lines 10–12 show transformations for excluding a field, adding the dimension key, and renaming a field, respectively. Lines 16–21 define the target, a type-2 SCD table parameterized by the name of a table, the names of attributes and their
data types, and SCD attributes. CloudETL also offers other dimension and fact classes. Here, only one statement is needed to define
a target while the complexity of processing SCDs is transparent to
users. Finally, the transformer is added to the job manager which
submits jobs to the Hadoop JobTracker (line 23).
Lookup on a Big Dimension Table
Typically, the lookup indices are small and can be fully cached
in main memory. However, when a dimension table is very big, and
its lookup index is too big to be fully cached in the main memory,
we propose the following two approaches for retrieving dimension
key values. The first is a hybrid solution where a Hive join and
multi-way lookups are used. The source fact data is first joined
in Hive with the big dimension table to retrieve the dimension key
values and then the lookup indices are used for the small dimension tables in CloudETL. The other solution, called the partitioned
lookup-index solution, uses multi-way lookups for both big and
small dimension tables which requires using a partitioned lookup
index. The partitioned lookup index is generated for the big dimension table. Recall that we assume that the source data for a
big dimension table is partitioned on the business key values. A
partition of the data is processed into dimension values saved in a
data file in HDFS. At the same time, a lookup index is also generated for each partition. We call this a partitioned lookup index.
The partitioned lookup indexes are stored in files that are co-located
with the corresponding data files. When the fact source data is also
partitioned with the same partitioning function as for the big dimension data (this is, e.g., possible in case the source data comes
from another MapReduce job or from a database), we can exploit
the co-location of partitioned lookup index files and data files and
run a map-only job to do the multi-way lookups. We illustrate this
in Figure 9. Suppose the job runs n mappers, each of which processes a partition of fact source data. Each mapper reads a partition
of the lookup index for pagedim, and the (full) lookup indices for
datedim and testdim (small dimension tables) into memory,
and then does multi-way lookups.
5. IMPLEMENTATION
5.1
Figure 10: The ETL code for the SCD pagedim
Input and Output
This is much more difficult to do in Hive. As Hive does not support the UPDATEs needed for SCDs, we have to resort to a cumbersome and labour-intensive workaround including joins and heavy
overwriting of tables to achieve the update effect. The HiveQL
The output of CloudETL is organized as hierarchical directories
and data files in HDFS. Hive employs HDFS to store data. A folder
and the files in it can be recognized as a logical table without changing the file format. When a table is created, a folder with the same
201
�at most 32 map tasks or 32 reduce tasks run concurrently. The following configuration parameters are used: the sort buffer size is
512MB, JVMs are reused, speculative execution is turned off, the
HDFS block size is 512MB, and the replication factor is 3. Hive
uses the same Hadoop settings. For ETLMR, we use Disco 0.4 [7]
as MapReduce platform (as required by ETLMR), set up the GlusterFS distributed file system (the DFS that comes with Disco) in
the cluster, and use PostgreSQL 8.3 as the DW DBMS.
Data sets: We use generated data sets for the running example and consider the star schema in Figure 2. In the experiments,
the pagedim and datedim dimensions get data from the same
source data set which we scale from 40GB to 320GB. Every 10GB
of source data result in 1.85GB pagedim dimension data
(113,025,455 rows) and 1.01MB datedim dimension data (41,181
rows). The testdim dimension has its own source data set with
a fixed size of 32KB (1,000 rows). The fact source data set is also
scaled from 40GB to 320GB. Every 10GB of source data result in
1.45GB fact data (201,233,130 rows) in the DW. The reason that
the size of the loaded data is smaller is that the source data contains
more redundant data like complete URLs for each test.
code is available from the full paper [17]. CloudETL has much better programmer efficiency and only needs 4 statements (780 characters, a statement ended by “;”), while Hive uses 112 statements
(4192 characters, including the statements for HiveQL and UDFs).
The CloudETL code is thus an order of magnitude less complex.
Similar results hold for a more dedicated ETL tool like Pig [19].
As discussed in previous work [18], Pig is a strong tool for data
transformations, but is not a good tool for loading as considered
here.
The code in Figure 11 shows how to do the fact processing. Only
4 statements with 907 characters are needed. In Hive, we need 12
statements with 938 characters for the fact processing.
6.2
Figure 11: The ETL code for fact processing
6. EXPERIMENTS
In this section, we empirically evaluate the performance of CloudETL by studying 1) the performance of processing different DW
schemas, including a star schema and schemas with an SCD and
a big dimension table, and 2) the effect of the various optimization techniques applied to CloudETL, including the pre-updates in
the mapper and co-location of data. We compare CloudETL with
our previous work ETLMR [18] which is a parallel ETL programming framework using MapReduce. ETLMR is selected because
CloudETL is implemented with the same goal as ETLMR and both
make use of MapReduce to parallelize ETL execution. ETLMR
is, however, designed for use with an RDBMS-based warehouse
system. We also compare with Hive and the co-partitioning of
Hadoop++ [8].
6.1
Dimension Data Processing
Simple star schema: In the first experiments, we process data
into the dimension tables of a star schema without any SCD updates. To make Hive support dimension processing, we implement
a number generator similar to CloudETL’s to generate the dimension key values and use a user-defined function (UDF) to get the
numbers. We use all 32 tasks to process the data and scale the data
from 40GB to 320GB. We measure the time from the start to the
end of each run.
Figure 12 shows the results. CloudETL processes the three dimension tables within one job and does data transformations in
mappers. The data for a dimension table is collected and written
to HDFS in a reducer. Hive, however, has to process the statements
for different dimension tables in different jobs. The total time used
by Hive is up to 28% higher than the time used by CloudETL (the
time for testdim is not shown in Figure 12 since it is negligible).
During the tests, we observe that Hive can employ map-only jobs to
process pagedim and testdim, but has to use both map and reduce to process datedim since datedim requires the DISTINCT
operator to find duplicate records. ETLMR uses its so-called offline
dimension scheme in which the data is first processed and stored
locally on each node, then collected and loaded into the DW by
the DBMS bulk loader (PostgreSQL’s COPY is used in this experiment). As shown, ETLMR is efficient to process relatively smallsized data sets, e.g., 40GB, but the time grows fast when the data is
scaled up and ETLMR uses about 81% more time than CloudETL
for 320GB.
Processing a type-2 SCD: We now study the performance when
processing the big dimension table pagedim which is a type-2
SCD (see Figure 13 and Figure 14). We test both initial load (“init.”)
and incremental load (“incr.”) in this experiment. In an initial load,
pagedim is cleared before a job starts. In an incremental load,
320GB source data is already loaded into pagedim before the job
starts. For CloudETL, the initial and incremental loads are both
tested using data with and without co-location. Figure 13 and Figure 14 show the results of the initial and incremental loads, respectively. The results show that data co-location improves the performance significantly and between 60% and 73% more time is used
when there is no co-location. This is because the co-located data
can be processed by a map-only job which saves time.
CloudETL outperforms ETLMR. When the data is scaled to 320
GB, ETLMR uses up to 3.8 times as long for the load. The pro-
Setup
Cluster setup: Our experiments are performed using a local
cluster of nine machines: eight machines are used as the DataNodes
and TaskTrackers, each of them has two dual-core Intel Q9400 processors (2.66GHz) and 3GB RAM. One machine is used as the NameNode and JobTracker and it has two quad-core Intel Xeon E5606
(2.13GHz) processors and 20GB RAM. The disks of the worker
nodes are 320GB SATA hard drives (7200rpm, 16MB cache, and
3.0Gb/s). Fedora 16 with the 64-bit Linux 3.1.4 kernel is used as
the operating system. All machines are connected via a 1Gbit/s
Ethernet switch.
We use Hadoop 0.21.0 and Hive 0.8.0. Based on the number of
cores, we configure Hadoop to run up to four map tasks or four reduce tasks concurrently on each node. Thus, at any point in time,
202
�420
420
All-CloudETL
pagedim-Hive
datedim-Hive
All-ETLMR
Load data-ETLMR
360
180
240
180
180
120
120
60
60
60
80
160
Dataset size, GB
0
40
320
Figure 12: Star schema, no SCD
420
CloudETL (Co-location)
Hadoop++ (Co-partition)
Pre-partition
360
Time (min.)
180
120
60
80
160
Dataset size, GB
320
Figure 15: Proc. type-2 SCD
80
120 160 200 240 280 320
Dataset size, GB
Figure 14: Incr. load type-2 SCD
420
32
Update in mapper (T3)
Pre & post-update (T2)
Update in reducers (T1)
Hive
Proc. data - ETLMR
Load -ETLMR
240
24
20
16
120
12
60
8
40
80
160
Dataset size, GB
Data with co-location
Data without co-location
28
180
0
40
0
40
120 160 200 240 280 320
Dataset size, GB
Figure 13: Init. load type-2 SCD
300
240
0
80
360
300
CloudETL(No co.)
CloudETL(Co.)
240
120
40
ETLMR
Hive
300
Time (min.)
300
240
0
Time (min.)
CloudETL (No co.)
CloudETL (Co.)
Speedup
Time (min.)
300
360
Time (min.)
360
420
Hive
ETLMR
320
Figure 16: Proc. type-1 SCD
4
4
8
12 16 20
24
Num. of cores
28
32
Figure 17: Speedup of dim. load
in the reducers; T2 ) first do “pre-updates” in the mappers, then do
“post-updates” in the reducers; and T3 ) first partition the source
data, co-locate the partitioned files, and then do map-only updates.
The results are shown in Figure 16. The map-only updates (T3 ) are
the fastest followed by pre- and post-updates (T2 ) which use between 16% and 42% more time. Updates in the reducers (T1 ) use
between 28% and 60% more time. The ETLMR offline dimension
scheme supports type-1 SCDs by processing data on MapReduce
and then loading the processed data into the DW (see also the discussion of Figure 12). It uses more time to process the scaled data,
e.g., the time for 320GB is 16%, 42% and 90% more than that of
T1 , T2 and T3 , respectively. Hive requires 4 jobs to process the
type-1 SCD and takes 3.5 times longer than CloudETL.
Speedup: We now study the speedup by varying the number
of cores from 4 to 32. We do the speedup tests using 320GB
pagedim data with and without co-location, respectively, i.e., the
tests are done when only map is used, and when map and reduce
both are used. Figure 17 shows the speedup lines of both tests.
The results indicate that the speedup with data co-location is 27
times for 32 cores and is close to linear, and better than without
co-location. In other words, loading co-located data can achieve
better speedup since a map-only job is run for the data. The slight
sub-linearity is mainly due to the communication cost as well as
task setup overheads on Hadoop.
cessing time used by ETLMR grows faster which is mainly due to
the database-side operation called post-fixing [18] used to set SCD
attribute values correctly. CloudETL also outperforms Hive significantly. For example, when tested using 320GB data, Hive uses
up to 3.9 times as long for the initial load while for the incremental
load, it uses up to 3.5 times as long. This is because the workaround
to achieve the update effect for the SCD handling requires several
sequential jobs (4 jobs for the initial load and 5 jobs for the incremental load) [17].
Compared with Hadoop++: We now compare with Hadoop++
for incremental load of pagedim. Hadoop++ co-partitions two
data sets by adding a “Trojan” join and index through MapReduce
jobs. The lines (from the two data sets) with identical join key values are put into the same data split and the same data node. We
change our program to read the co-partitioned data splits, and to
run a map-only job. Figure 15 shows the test results. The results
include the times for prepartitioning the data sets and indicate that
Hadoop++ uses about 2.2 times as long as CloudETL to partition
the same data set. Processing the co-partitioned data also takes
longer, 8%–14% more time. We found that the Hadoop++ copartitioning is much more tedious and has jobs for the following
tasks: converting textual data to binary, co-partitioning, and creating the index. In addition, for an incremental load, Hadoop++
has to rebuild the index from scratch which is increasingly expensive when the data amounts grow. The co-location of CloudETL,
however, makes use of a customized block placement policy to colocate the data. It is very light-weight and more suitable for incremental load.
Processing a type-1 SCD: We now process pagedim as a type1 SCD and do the following three tests: T1 ) do the type-1 updates
6.3
Fact Data Processing
We now study the performance of fact processing. Fact processing includes doing data transformations and looking up dimension
key values. We load fact data into testresultsfact in this
experiment and use both small and big dimension tables by vary-
203
�420
420
ETLMR
Hive
CloudETL
360
180
240
180
120
120
60
60
0
40
80
120 160 200 240 280 320
Dataset size, GB
300
Time (min.)
240
0
40
ETLMR
Hive
CloudETL (part. lookup index)
CloudETL (hybrid)
360
300
Time (min.)
Time (min.)
300
420
Hive
ETLMR
CloudETL
360
240
180
120
60
80
120 160 200 240 280 320
Dataset size, GB
0
40
80
120 160 200 240 280 320
Dataset size, GB
Figure 18: Proc. facts, small dims, SCD Figure 19: Proc. facts,small dims,no SCD Figure 20: Proc. facts, big dims, SCD
420
32
ETLMR
Hive
CloudETL (part. lookup index)
CloudETL (hybrid)
360
24
Speedup
Time (min.)
300
240
180
20
16
120
12
60
8
0
40
80
Small dim.
Big dim.
28
4
120 160 200 240 280 320
Dataset size, GB
Figure 21: Proc. facts, big dims, no SCD
4
8
12 16 20
24
Num. of cores
28
32
Figure 22: Speedup of fact processing
source data. We use the following two approaches for the lookups.
The first is the hybrid solution where a Hive join is used to retrieve
the key values from the big dimension table and then multi-way
lookups are used to retrieve the key values from the small dimension tables (the lookup index sizes are 4.5MB for datedim and
32KB for testdim). The other is the partitioned lookup-index
solution. We assume that the fact source data has already been partitioned. Each mapper caches only one partition of the big lookup
index in addition to the two small lookup indices. A partition of
the fact data is processed by the mapper which caches the lookup
index partition that is relevant to the fact partition. A map-only job
is run to do multi-way lookups. Figure 20 and 21 show the results
with and without SCD support, respectively. As shown, CloudETL
again outperforms both Hive and ETLMR. When the hybrid solution is used, CloudETL is more efficient than when the partitioned
big lookup index is used. The partitioned lookup-index solution requires between 11% and 18% more time. Hive and ETLMR do not
scale as well and, e.g, when there is an SCD, they require 35% and
85% more time, respectively, to process 40GB source data while
they require 71% and 211% more time, respectively, for 320GB.
We now study the speedup when scaling up of the number of the
nodes. Figure 22 shows the speedup when processing up to 320GB
fact source data using small dimension tables and big dimension
tables (using the hybrid solution). As shown, CloudETL achieves
nearly linear speedup in both cases. For 32 cores, the speedup is
27.5 times for big dimension tables and 29 times for small dimension tables. A reason for the difference is that the hybrid solution
requires an additional Hive job for the big dimension.
In summary, CloudETL is the fastest solution in all the experiments. For a simple star schema, Hive uses up to 28% more time
ing the size of pagedim. With the small dimension table, the
lookup indices are used and cached in main memory for multi-way
lookups. The lookup index sizes are 32KB (testdim), 624KB
(datedim), 94MB pagedim (as a traditional dimension, i.e., not
an SCD) and 131MB pagedim (as a type-2 SCD). They are generated from 2GB dimension source data. For ETLMR, we use its
offline dimension scheme when pagedim is used as a non-SCD.
This is the ETLMR scheme with the best performance [18]. When
pagedim is used as an SCD, the online dimension scheme is used
for comparison. This scheme retrieves dimension key values from
the underlying RDBMS. For Hive, we join the fact data with each
of the dimension tables to retrieve dimension key values. Figures 18 and 19 present the results from using the small dimension
tables with and without SCD support, respectively. The comparison of the results in two figures shows that CloudETL (without
SCD support) has the highest performance while the processing
with an SCD uses about 5%–16% more time than without an SCD.
CloudETL outperforms both ETLMR and Hive when using small
dimension tables since a map-only job is run and in-memory multiway lookups are used. In contrast, Hive requires four sequential
jobs (an additional job is used for projection after getting the dimension key values) and uses up to 72% more time. ETLMR with
SCD support takes about 2.1 times longer than CloudETL (see Figure 18) due to the increasing cost of looking up dimension key values from the DW. ETLMR without SCD support also runs a maponly job, and its performance is slightly better when processing the
relatively small-sized data (see Figure 19), e.g., 40GB, but the time
grows faster when the data is scaled.
We now study the performance with big dimension tables. The
dimension values in the big table pagedim is generated from 40GB
204
�while ETLMR uses 81% more time. When a type-2 SCD is processed, Hive uses up to 3.9 times as long as CloudETL. Hadoop++
has a performance which is closer to CloudETL’s, but CloudETL
remains faster. The experiments have also shown that the co-location
used by CloudETL has a positive performance impact and that
CloudETL’s scalability is close to linear.
Hadoop that requires applications to explicitly co-locate files by
using a common identifier (a “locator”) when a file is created. Instead of changing Hive to do that, we in CloudETL exploit how files
are named and define co-location by means of a regular expression.
Further, this is fully implemented by using HDFS’s standard block
placement mechanism such that CloudETL requires no changes of
the Hadoop/HDFS code. HadoopDB [1] and Hadoop++ [8] do also
co-locate data. HadoopDB does so by using RDBMS instances instead of HDFS. Hadoop++ considers the entire data set when doing
co-location which is impractical when incremental data is added.
Pig and Hive provide several join strategies in terms of the features of the joined data sets. HadoopDB [1] is a hybrid solution
that uses both Hadoop and DBMS instances. It pushes joins to
the DBMSs on each node. The join algorithms for MapReduce
are compared and extensively studied in [3, 12]. The join implementations above process a join operation within one MapReduce
job, which causes a non-trivial cost. To address this issue, [2, 13]
propose multi-way joins which shuffle the joining of data to reducers in a one-to-many fashion and do the joins on the reduce side.
This, however, becomes expensive if there are many tables to join.
In contrast, CloudETL does “multi-way lookups” (similar to the
multi-way joins) in map side when processing fact data and only a
minimal amount of data is saved in the lookup index files and used
for joins. This is much more efficient for our particular purpose.
7. RELATED WORK
An overview of previous research on ETL is given in [28]. To
tackle large-scale data, parallelization is the key technology to improve the scalability. The MapReduce paradigm [5] has become the
de facto technology for large-scale data-intensive processing due
to its ease of programming, scalability, fault-tolerance, etc. Multithreading is another parallelization technology which has been used
for a long time. Our recent work [23] shows multi-threading is relatively easy for ETL developers to apply. It is, however, only effective on Symmetric Processor Systems (SMP) and does not scale
out on many clustered machines. Thus, it can only achieve limited scalability. The recent parallelization systems Clustera [6] and
Dryad [11] support general cluster-level computations to data management with parallel SQL queries. They are, however, still only
available as academic prototypes and remain far less studied than
MapReduce. Like MapReduce, they are not ETL-specific.
Stonebraker et al. compare MapReduce with two parallel DBMSs
(a row-store and a column-store) and the results show that the parallel DBMSs are significantly faster than MapReduce [20, 21]. They
analyze the architectures of the two system types, and argue that
MapReduce is not good at query-intensive analysis as it does not
have a declarative query language, schema, or index support. Olston et al. complain that MapReduce is too low-level, rigid, hard
to maintain and reuse [19]. In recent years, HadoopDB [1], Aster,
Greenplum, Cloudera, and Vertica all have developed hybrid products or prototypes by using two class systems which use both MapReduce and DBMSs. Other systems built only on top of MapReduce while providing high-level interfaces also appear, including
Pig [19], Hive [26], and Clydesdale [14]. These systems provide
MapReduce scalability but with DBMS-like usability. They are
generic for large-scale data analysis and processing, but not specific to dimensional ETL where a DW must be loaded. For example, they do not support SCD updates or simple commands for
looking up key values dimension members and inserting them if
not found. In contrast, CloudETL provides built-in support for processing different dimensional DW schemas including SCDs such
that the programmer productivity is much higher. To the best of
our knowledge, other existing ETL tools do not offer this kind of
support in a cloud setting either.
Our previous work ETLMR [18] extends the ETL programming
framework pygrametl [24] to be used with MapReduce. ETLMR,
however, is built for processing data into an RDBMS-based DW
and some features rely on the underlying DW RDBMS, such as
generating and looking up dimension key values. CloudETL, on
the other hand, provides built-in support of the functionality needed
to process dimensions and facts. ETLMR uses the RDBMS-side
operation “post-fixing” to repair inconsistent data caused by parallelization, while CloudETL solves this issue by exploiting global
key value generation and SCD updates on Hadoop. The recent
project Cascading [4] is able to assemble distributed processes and
plan them to run in a Hadoop cluster. The workflow of Cascading
is somewhat similar to the transformers of CloudETL. However,
Cascading does not consider DW-specific data processing such as
key generation, lookups, and processing star schemas and SCDs.
The co-location of data in CloudETL is similar to the co-location
in CoHadoop [9]. CoHadoop is, however, a general extension to
8. CONCLUSION AND FUTURE WORK
With the ever-growing amount of data, it becomes increasingly
challenging for data warehousing technologies to process the data
in a timely manner. This paper presented the scalable dimensional
ETL framework CloudETL. Unlike traditional ETL systems, CloudETL exploits Hadoop as the ETL execution platform and Hive as
the warehouse system. CloudETL provides built-in support of highlevel ETL-specific constructs for common, dimensional DW schemas
including star schemas and SCDs. The constructs facilitate easy
implementation of parallel ETL programs and improve programmer productivity very significantly. In particular, it is much easier
to handle SCDs since CloudETL can perform the necessary updates
(i.e., overwrites for type-1 SCDs and updates of validity dates and
version numbers for type-2 SCDs). When CloudETL is not used,
this requires extensive programming and overwriting of tables.
In the paper, we presented an approach for efficient processing
of updates of SCDs in a distributed environment. We proposed
a method for processing type-1 SCDs which does pre-updates in
mappers and post-updates in reducers. We also presented a block
placement policy for co-locating the files in HDFS to place data
to load such that a map-only job can do the load. In fact processing, we proposed to use distributed lookup indices for multi-way
lookups to achieve efficient retrieval of dimension key values. We
conducted extensive experiments to evaluate CloudETL and compared with ETLMR and Hive. The results showed that CloudETL
achieves better performance than ETLMR when processing different dimension schemas and outperforms the dimensional ETL capabilities of Hive: It offers significantly better performance than
Hive and it requires an order of magnitude less code to implement
parallel ETL programs for the schemas. In an experiment, Hive
used 3.9 times as long as CloudETL and required 112 statements
while CloudETl required only 4. We also compared CloudETL
with Hadoop++ and found that CloudETL was faster.
There is a number of future research directions for this work.
First, we plan to make CloudETL support more ETL transformations. Second, it would be interesting to consider more efficient
backends, such as Spark [25], for fast ETL processing. Last, it
would be good to create a graphical user interface (GUI) where
205
�[14] T. Kaldeway, E. J. Shekita, and S. Tata. “Clydesdale:
structured data processing on MapReduce". In EDBT, pp.
15–25, 2012.
[15] R. Kimball and M. Ross. “The Data Warehouse Toolkit”.
John Wiley and Son, 1996.
[16] J. Lin and C. Dyer. “Data-Intensive Text Processing with
MapReduce”. Morgan & Claypool Publishers, 2010.
[17] X. Liu, C. Thomsen, and T. B. Pedersen. “CloudETL:
Scalable Dimensional ETL for Hadoop and Hive”. Technical
Report (TR-31), Dept. of Computer Science, Aalborg
University, http://dbtr.cs.aau.dk/pub.htm as of
2014-06-11.
[18] X. Liu, C. Thomsen, and T. B. Pedersen, “ETLMR: A
Highly Scalable Dimensional ETL Framework Based on
MapReduce”. TLDKS 8, LNCS 7790:1–31, 2013.
[19] C. Olston et al. “Pig Latin: A Not-so-foreign Language for
Data Processing”. In SIGMOD, pp. 1099–1110, 2008.
[20] A. Pavlo et al. “A Comparison of Approaches to Large-scale
Data Analysis”. In SIGMOD, pp. 165–178, 2009.
[21] M. Stonebraker et al. “MapReduce and Parallel DBMSs:
friends or foes?”. CACM, 53(1):64–71, 2010.
[22] C. Thomsen and T. B. Pedersen. “Building a Web Warehouse
for Accessibility Data". In DOLAP, pp. 43–50, 2006.
[23] C. Thomsen and T. B. Pedersen. “Easy and Effective Parallel
Programmable ETL”. In DOLAP, pp. 37–44, 2011.
[24] C. Thomsen and T. B. Pedersen. “pygrametl: A Powerful
Programming Framework for Extract-Transform-Load
Programmers”. In DOLAP, pp. 49–56, 2009.
[25] Spark Project,
http://spark.incubator.apache.org as of
2014-06-11.
[26] A. Thusoo et al. “Hive: A Warehousing Solution Over a
Map-reduce Framework”. PVLDB 2(2):1626–1629, 2009.
[27] “TPC-H”. http://tpc.org/tpch/ as of 2014-06-11.
[28] P. Vassiliadis. “A Survey of Extract-Transform-Load
Technology”. IJDWM 5(3):1–27, 2009.
users can “draw” an ETL flow by using visual transformation operators and still get a highly parallel ETL program.
Acknowledgments We would like to thank Dr. Jorge-Arnulfo
Quiané-Ruiz for sharing the Hadoop++ source code with us.
9. REFERENCES
[1] A. Abouzeid et al. “HadoopDB: An Architectural Hybrid of
MapReduce and DBMS Technologies for Analytical
Workloads". PVLDB 2(1):22–933, 2009.
[2] F. N. Afrati and J. D. Ullman. “Optimizing Joins in a
Map-reduce Environment". In EDBT, pp.99-110, 2010
[3] S. Blanas et al. “A Comparison of Join Algorithms for Log
Processing in MapReduce". In SIGMOD, pp.975–986, 2010.
[4] “Cascading”. http://www.cascading.org as of
2014-06-11.
[5] J. Dean and S. Ghemawat. “Mapreduce: Simplified Data
Processing on Large Clusters”. CACM 1(51):107–113, 2008.
[6] D. DeWitt et al. “Clustera: An Integrated Computation and
Data Management System”. PVLDB 1(1):28–41, 2008.
[7] “Disco”. http://discoproject.org as of
2014-06-11.
[8] J. Dittrich et al. “Hadoop++: Making a Yellow Elephant Run
Like a Cheetah”. PVLDB 3(1):518–529, 2010.
[9] M.Y. Eltabakh et al. “CoHadoop: Flexible Data Placement
and Its Exploitation in Hadoop”. PVLDB 4(9):575–585,
2011.
[10] “Hadoop”. http://hadoop.apache.org/ as of
2014-06-11.
[11] M. Isard et al. “Dryad: Distributed Data-Parallel Programs
from Sequential Building Blocks”. In EuroSys, pp. 59–72,
2007.
[12] D. Jiang, B. C. Ooi, L. Shi, and S. Wu. “The Performance of
MapReduce: An In-depth Study". PVLDB 3(1):472–483,
2010.
[13] D. Jiang, A. K. H. Tung, and G. Chen. “Map-join-reduce:
Towards Scalable and Efficient Data Analysis on Large
Clusters". TKDE 23(9)1299–1311, 2011.
206
�
 Xiufeng Liu
Xiufeng Liu