Conditioned Based Maintenance Using Wireless Sensor Network
C. Kwan1, B. Ayhan1, J. Yin1, and X. Liu1
P. Ballal2, A. Athamneh2, A. Ramani2, W. Lee2, and F. Lewis2
Abstract— In this paper, we summarize our research
activities in Condition Based Maintenance (CBM) of critical
power system components using Wireless Sensor Network
(WSN). First, two testbeds were built: one for emulating
electrical faults in motor windings and one for emulating
mechanical faults in motors and generators. Second,
appropriate sensors were installed on the testbeds and sensor
data were collected using wireless nodes. Third, advanced
algorithms were implemented and extensive simulations
validated the performance of the algorithms. Finally, real-time
experiments were performed to detect various faults.
I. INTRODUCTION
D
ISTRIBUTED data acquisition and real-time data
interpretation are two primary ingredients of an
efficient Condition Based Maintenance (CBM) system.
These two are mutually dependent on each other. Data
interpretation algorithms are learning systems that mature
with time. Distributed data acquisition should thus be
adequate for both machine maintenance and learning by the
monitoring system. In control theory terms, one needs both
a component to control the machinery and a component to
probe or identify the system. Wireless sensors are playing
an important role in providing this capability. In wired
systems, the installation of adequate number of sensors is
often limited by the cost of wiring, which runs from $10 to
$1000 per foot [1]. Previously inaccessible locations,
rotating machinery, hazardous or restricted areas, and
mobile assets can now be reached with wireless sensors.
These can be easily moved, should a sensor need to be
relocated.
Wireless Sensor Network (WSN) is reaching maturity.
Real-time and continuous data collection is no longer a
dream now. Commercial wireless sensor nodes are now
available. It would be ideal to add WSN with some
intelligent reasoning such as prognostics so that it will
become even more powerful.
We propose a WSN with advanced prognostic capability
for monitoring critical components in the power plants.
First, our hardware system consists of a wireless sensor
network with appropriate sensors and data acquisition card,
and a PC. The portable PC has advanced prognostic
Manuscript received March 9, 2008. This work was supported in part by
the U.S. Department of Energy under Grant DE-FG02-07ER84676.
1
C. Kwan, B. Ayhan, J. Yin, and X. Liu are with Signal Processing, Inc.,
Rockville, MD 20850 USA (phone: 301-315-2322; e-mail: chiman.kwan@
signalpro.net).
2
A. Athamneh, P. Ballal, A. Ramani, W. Lee, and F. Lewis are with the
Department of Electrical Engineering, The University of Texas at Arlington,
Arlington, TX 76019 USA.
algorithms and user friendly Graphical User Interface (GUI)
for displaying component health status and trends. Second,
the prognostics software has a number of innovative tools,
including rule-based algorithm and Principal Component
Analysis (PCA). The proposed framework combines
hardware and innovative data processing software in a
unified fashion and will subsequently reduce the system
downtime and maintenance costs. Our proposed framework
is modular and flexible.
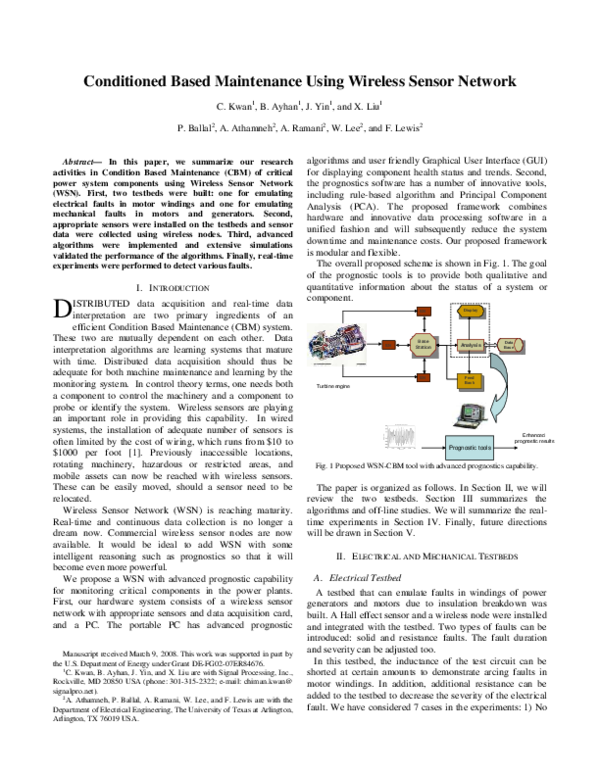
The overall proposed scheme is shown in Fig. 1. The goal
of the prognostic tools is to provide both qualitative and
quantitative information about the status of a system or
component.
SN
SN
Base
Base
Station
Station
SN
Turbine engine
Display
Display
Analysis
Analysis
Data
Data
Base
Base
Feed
Feed
Back
Back
Enhanced
prognostic results
Prognostic tools
Fig. 1 Proposed WSN-CBM tool with advanced prognostics capability.
The paper is organized as follows. In Section II, we will
review the two testbeds. Section III summarizes the
algorithms and off-line studies. We will summarize the realtime experiments in Section IV. Finally, future directions
will be drawn in Section V.
II. ELECTRICAL AND MECHANICAL TESTBEDS
A. Electrical Testbed
A testbed that can emulate faults in windings of power
generators and motors due to insulation breakdown was
built. A Hall effect sensor and a wireless node were installed
and integrated with the testbed. Two types of faults can be
introduced: solid and resistance faults. The fault duration
and severity can be adjusted too.
In this testbed, the inductance of the test circuit can be
shorted at certain amounts to demonstrate arcing faults in
motor windings. In addition, additional resistance can be
added to the testbed to decrease the severity of the electrical
fault. We have considered 7 cases in the experiments: 1) No
�inductance shortage (Baseline); 2) 10 mH shorted; 3) 20 mH
shorted; 4) 30 mH shorted; 5) 10 mH shorted with the
addition of 10 ohms; 6) 20 mH shorted with the addition of
10 ohms; 7) 30 mH shorted with the addition of 10 ohms.
The sampling rate of the data collection is 1.2 kHz. For 6
consecutive days, 5 sets of data were collected for each of
the 7 cases.
To simulate the stator coil of a motor or a generator,
different sizes of inductors (a mH, b mH, and so on) are
connected in series. Fig. 2 shows the conceptual design of
the test-bed for electrical faults. The inductance values are:
1, 2.5, 5, 10, 20 and 30 mH. They can be rearranged within
the series combination of the whole coil (L coil = 68.5 mH)
to apply the fault on the following different inductance
values:
1
2.5
3.5
5
6
7.5
8.5
10
11
12.5
Fig. 4 Finished testbed.
We used the Microstrain wireless accelerometer node
where a triaxial accelerometer is combined with data
logging transceiver for use in high speed wireless sensor
networks. Fig. 5 shows the wireless sensor node for
vibration data collection.
Inductance Coils
a mH
b mH
c mH
d mH
e mH
f mH
g mH
Fuse
WSN
Hall Effect
Sensor
Variable
Resistor
Fault Generator
Switch
Power Source
Fig. 2 Conceptual design of the test-bed for electrical faults.
Data is collected using a Hall Effect Sensor (Fig. 3). This
sensor is interfaced to a Crossbow Mica2 mote (Fig. 3) for
RF transmission.
Fig. 5 Wireless accelerometer node. The range is more than 70 meters.
III. REAL-TIME ALGORITHMS AND OFF-LINE STUDIES
Board for interfacing Hall
Effect sensor
Mica2 mote
Fig. 3 Left: Hall effect sensor; Right: Wireless mote.
B. Mechanical Testbed
There are critical rotating components such as bearing and
gearbox in generators and motors. Ensuring healthy
conditions of these components will reduce system
downtime and save maintenance costs.
We set up a testbed to demonstrate mechanical faults
where accelerometers are used for vibration sensing through
the means of wireless data collection. The testbed consists of
a flywheel that is attached to a shaft rotated by an electrical
motor. Fig. 4 shows the finished testbed.
A. Wireless Data Correction
It was observed from some of the collected wireless raw
data that there were discrepancies in the raw data waveform
(see Fig. 6-a). Although these discrepancies were localized
in limited sections of the data waveform, they still have
caused considerable effects on the spectrum of the data (see
Fig. 6-c). In order to reduce these unwanted effects, a data
correction algorithm has been developed. The algorithm
corrected these discrepancies and resulted in correct
spectrum waveforms (see Fig. 6-b,c).
�noticed that the amplitude difference of the peaks differ for
the two classes. The new feature takes advantage of this
difference. The new feature is basically the ratio of the
“baseline peak” to the “maximum peak”. For introduction of
these terms, see Fig. 7.
125
120
115
Amplitude
110
Solid - 10mH (beg20mh1)
105
Max peak
150
100
140
95
Baseline peak
130
90
120
85
110
80
7080
7100
7120
7140
No
7160
7180
7200
100
90
a) Wireless raw data
80
125
70
120
60
115
50
4000
6000
8000
10000 12000 14000 16000
18000
Fig. 7 Introduction of max and baseline peaks.
The new feature is applied to 6 days data. The values of
the new feature are shown in Fig. 8. It is seen that for five
classes, thresholds can be assigned where 5 of 7 classes can
be distinguished from each other. These thresholds are
shown as dotted lines in Fig. 8. On the other hand for
Faultless and Res10-10mH classes, an overlapping between
their samples is observed. Thus, for values upper than 0.897
(new feature value), there is a need for another measure to
differentiate between these two overlapping classes. Based
on some additional analysis, another rule was developed to
differentiate the faultless and the Res10-10mH cases.
90
85
80
6950
7000
7050
No
7100
7150
7200
b) Wireless data (After correction)
4
10
Raw data
After correction
2
10
1
0
10
Amplitude
2000
100
95
-2
10
-4
10
-6
10
0
105
0
100
200
300
Frequency (Hz)
400
500
600
c) Spectrums before and after correction
Fig. 6 Discrepancy in wireless data and the spectrums before and after
correction
B. Electrical Fault Classification Algorithms
We applied two methods to classify the several fault
cases. One is based on Spectral Angle Mapper (SAM) [2]
and the other one is a rule-based algorithm. SAM approach
has reasonable performance. However, it has been seen that
due to similarity in waveform shapes of the reference
signatures, SAM method has misclassification errors. Thus,
instead of the spectrum signature, a new feature has been
considered. When the time domain plots of the close
reference signature classes are considered (see Fig. 7), it is
Baseline Peak/Max Peak (normalized between 0 and 1)
Amplitude
110
Faultless
Solid-10mH
Solid-20mH
Solid-30mH
Res10-10mH
Res10-20mH
Res10-30mH
0.897
0.9
0.82
0.8
0.72
0.7
0.618
0.6
0.5
0.45
0.4
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Fig. 8 Ratio of the “baseline peak” to the “maximum peak” values for the 6
days data
The rule-based approach is applied to the 6 days data and
the resultant confusion matrix is shown in Table 1. It can be
seen from Table 1 that with the selected thresholds in the
identified rules, the classification results are almost perfect
with only 1 miss out of 30 in Faultless class data.
Table 1 Confusion matrix for rule based-approach (Testing data set consist
of 6 days measurements)
�Faultless
96.67
0.00
0.00
0.00
0.00
0.00
0.00
Faultless
Solid-10mH
Solid-20mH
Solid-30mH
10ohm-10mH
10ohm-20mH
10ohm-30mH
Solid-10mH
0.00
100.00
0.00
0.00
0.00
0.00
0.00
Solid-20mH
0.00
0.00
100.00
0.00
0.00
0.00
0.00
Solid-30mH
0.00
0.00
0.00
100.00
0.00
0.00
0.00
10ohm-10mH
0.00
0.00
0.00
0.00
100.00
0.00
0.00
10ohm-20mH
3.33
0.00
0.00
0.00
0.00
100.00
0.00
10ohm-30mH
0.00
0.00
0.00
0.00
0.00
0.00
100.00
C. Mechanical Fault Health Trending
We developed a proprietary health trending algorithm
based on PCA [3]. In the training part, only the normal data
have been used to compute the principal components which
will form the PCA model.
In the testing part, the test data of interest is projected to
the principal components after being subtracted from the
mean.
In Fig. 9, the x-axis is used to represent the “data
measurement no”. The following index table shows what
these measurements correspond to. It can be observed from
the health index values that the index value increases as the
mass of the weight is increased or the mass is put to a further
outside location in the flywheel. Among the three channels,
the X channel seems to yield index values with less variation
when compared to other 2 channels or the concatenation of 3
channels.
Index
------1:25
26:50
51:75
76:100
101:125
126:150
151:175
176:200
201:225
226:250
251:275
276:300
301:325
Information
------------------Day1,2,3,4,5, No load measurements, 5 for each day
Day1,2,3,4,5, 5grams Inner location measurements,
Day1,2,3,4,5, 5grams Middle location measurements,
Day1,2,3,4,5, 5grams Outer location measurements,
Day1,2,3,4,5, 10grams Inner location measurements,
Day1,2,3,4,5, 10grams Middle location measurements,
Day1,2,3,4,5, 10grams Outer location measurements,
Day1,2,3,4,5, 15grams Inner location measurements,
Day1,2,3,4,5, 15grams Middle location measurements,
Day1,2,3,4,5, 15grams Outer location measurements,
Day1,2,3,4,5, 20grams Inner location measurements,
Day1,2,3,4,5, 20grams Middle location measurements,
Day1,2,3,4,5, 20grams Outer location measurements,
Channel 2 (X)
0.8
0.7
PCA health index
A. Real-time Fault Diagnostic System for
Motor/Generator Winding Faults
The first prototype is for detecting faults and estimating
fault sizes in the electrical testbed, which emulates
insulation problems in windings of motors and generators.
The algorithms have been described in Section II. There are
several modules in our prototype: 1) Input module for
acquiring data; 2) Wireless data correction module; 3)
Processing module for fault classification; 4) Output module
for displaying decisions.
The GUI of this prototype is shown in Fig. 10.
Fig. 10 Fault diagnostic prototype for motor/generator winding fault
classification.
There are 3 fault cases: no fault, solid fault, and resistance
fault. Within the solid fault case, we have 3 situations: 10
mH, 20 mH, and 30 mH. For the resistance faults, we also
have 3 cases: 10 ohm and 10 mH, 10 ohm and 20 mH, and
10 ohm and 30 mH. The different cases have different
spectral shapes and hence can be differentiated.
Real-time experiments were performed. We have run
experiments for each case. Video clips were recorded. Here
we include a few snap shots of 3 representative cases.
• No fault
The experiment was recorded by using a camcorder.
Fig. 11 (a) shows the time domain data from the wireless
sensor and (b) shows the real-time classification results of
our tool. It can be seen that “no fault” condition was
correctly classified.
0.6
0.5
0.4
0.3
0.2
0.1
0
IV. REAL-TIME PROTOTYPES AND EXPERIMENTS
0
50
100
150
200
Measurement no
250
300
350
Fig. 9 PCA Health index values using Channel 2 (X) for 5 days
measurements (3 locations, no load and 4 weights), number of principal
components: 15
�(a)
(c) Real-time classification results.
Fig. 12 (a) 30 mH inductor; (b) Scope shows sensor data; (c) Decision of the
our real-time classification algorithm.
• Resistance fault (10 ohm and 20 mH)
This experiment is about the detection of a resistance
fault. A 10 ohm resistor and 20 mH inductor were used in
the experiment to emulate the fault. Fig. 13 shows the snap
shots from a video clip. (d) indicates correct classification
result of the experiment
.
(b)
Fig. 11 (a) Scope shows clean sensor data; (b) Decision of our real-time
classification algorithm.
• Solid fault (30 mH)
Fig. 12 shows the 30mH inductor used in the
experiment, the oscilloscope display of the wireless sensor
data, and the final decision of our real-time tool. A video
clip was recorded and the images are taken from that clip.
(a) Adjustable resistor
(b) 20 mH inductor
(a) 30 mH inductor
(c) Motor coil emulator
(b) Sensor output
�(d) Classification result
Fig. 13 Real-time classification of a resistance fault.
B. Real-time Fault Diagnostic System for Mechanical
Faults
Similar to the first prototype, the second prototype consists
of the following modules: 1) Input module for acquiring
accelerometer data; 2) PCA health monitoring tool; 3)
Output module for displaying health index. The basic idea in
PCA is to use the fault free data to get a system model. If the
system health deviates from the normal status, the health
index will increase. The higher the vibration level, the larger
the health index will be.
The GUI for this prototype is shown in Fig. 14.
Fig. 15 Real-time detection of a 5 gram off-balance.
• 15 gram outer ring
Here a 15 gram screw was attached to the outer ring of the
flywheel. The figure below shows a snap shot of the video.
Now the vibration level was quite large as compared to the 5
gram case.
Fig. 16 Real-time detection of a 15 gram off-balance.
V. FUTURE DIRECTIONS
We are currently trying to commercialize our real-time
systems to some potential users. Our goal is to embed our
system into motors and generators.
Fig. 14 Fault diagnostic prototype for mechanical fault classification.
VI. ACKNOWLEGEMENT
Many real-time experiments were performed. We include
two cases.
• 5 gram in the middle of the flywheel
A 5 gram screw was added to the middle of the flywheel.
The vibration data were collected and wirelessly transmitted
to a receiver near the processing center. The figure below
shows a snapshot of the video. It can be seen the vibration
level was not very large. A health index was produced by
our tool.
The authors would like to thank Ms. Jenny Tennant for
proofreading our paper and providing valuable comments.
REFERENCES
[1]
[2]
[3]
A. Tiwari, P. Ballal, F. L. Lewis, “Energy-Efficient Wireless Sensor
Network Design & Implementation for Condition Based
Maintenance,” ACM Trans. On Sensor Network. 2007.
C.-I. Chang, Hyperspectral Imaging: Techniques for Spectral
Detection and Classification, Springer, 2003.
S. Haykin, Neural Network: A Comprehensive Foundation, PrenticeHall, 1998.
�
 CHIMAN KWAN
CHIMAN KWAN