Systèmes Distribués de Pilotage de Programmes : Application à
l’Imagerie Médicale
Naoufel Khayati*1,** — Wided Lejouad Chaari*2 — Sabine Moisan**
* ENSI Tunis, Campus Universitaire La Manouba, Tunisie.
1
Ur. SOIE, ISG Tunis / 2GRIFT, ENSI
** INRIA Sophia Antipolis – Projet Orion, France.
{naoufel.khayati, sabine.moisan}@sophia.inria.fr ; wided.chaari@ensi.rnu.tn
Résumé
Nous nous intéressons aux Systèmes à Base de
Connaissances (SBC) en pilotage automatique de
programmes dont le but est d'automatiser l'utilisation
de logiciels complexes, grâce à des systèmes capables
de planifier des traitements et d'en contrôler
l’exécution. Leur distribution devient indispensable car
les applications en grandeur réelle impliquent de plus
en plus de participants inter ou intra-entreprises sur
divers sites. La distribution permet soit la simple
consultation distante de bases de connaissances, soit
la construction collaborative de bases de
connaissances, soit le lancement d'une requête sur un
SBC distant, avec des données locales. L’application
actuelle porte sur l'assistance de différents médecins
en Imagerie médicale et plus précisément pour la
détection de l’ostéoporose dans des radiographies d’os
de leurs patients. L’assistance vient du fait que le
traitement d’une requête sur des images données, par
plusieurs programmes distants est transparent aux
médecins. Dans cet article, nous proposons une
architecture distribuée d’un système de pilotage de
programmes illustrée par un scénario pour la
résolution des requêtes de médecins.
1. Introduction
!
"
"
#
$
%
*+,
&
'
#
(#%&' )
$
.
/
Les médecins utilisateurs voulant bénéficier des
services du pilotage peuvent être dans des sites
distincts, les programmes et les connaissances sur leur
utilisation peuvent être écrits par des personnes
différentes et donc situés dans des machines distantes.
Ainsi, l’étude de la distribution de ces systèmes s’avère
intéressante puisqu’elle
0
�Notre objectif est de proposer des solutions de
coopération et de partage qui permettent à des équipes
de mettre en commun des programmes d’imagerie
médicale et les connaissances sur leur utilisation et de
bénéficier ainsi des travaux d’autres équipes.
Dans cet article, nous commençons par définir les
systèmes de pilotage de programmes et l’intérêt de leur
distribution. Dans la section 4, nous proposons une
architecture distribuée pour un système de pilotage
illustrée par un premier scénario pour le traitement des
requêtes.
2. Systèmes de pilotage de programmes
Un système de pilotage est un Système à Base de
Connaissances (SBC) qui assure la sélection et
l’enchaînement de programmes dans différentes
configurations, grâce au raisonnement de son moteur et
aux connaissances contenues dans sa base. Ceci permet
la réutilisation «intelligente» [6,8] de programmes, sans
modifier leur code et rend ces programmes accessibles
à des utilisateurs non-spécialistes des techniques et des
algorithmes implantés dans les programmes. Des
environnements de pilotage ont vu le jour [9] afin
d’offrir une automatisation de l’utilisation de diverses
bibliothèques de programmes.
Un tel système est composé comme tout SBC
d’une base de connaissances qui contient le savoir-faire
sur l’utilisation des programmes à piloter et d’un
moteur de pilotage qui utilise ce savoir-faire pour
construire un plan d’exécution des programmes et
l’exécuter pour obtenir les résultats ; le moteur doit
avoir toutes les connaissances pour planifier
automatiquement les programmes à exécuter, lancer
leur exécution, produire des résultats, les évaluer et
savoir quelles actions de correction entreprendre (replanification ou re-exécution de l’étape courante) en
cas de mauvaise qualité. De plus, il comporte aussi une
bibliothèque de programmes à piloter, adaptés à un
domaine d’application précis, un ensemble de données
à traiter (par exemple, des images dans le cas de
l’imagerie médicale) et une interface graphique
permettant à un utilisateur d’exprimer son objectif, de
suivre l’exécution et de visualiser les résultats.
3. Pilotage distribué
Les systèmes de pilotage distribués offrent des
services, d’une part, à des utilisateurs distants qui
souhaitent utiliser les facilités de résolution optimale
du pilotage pour traiter leurs données et, d’autre part, à
des experts et des concepteurs pour diffuser et partager
des programmes. Ces derniers doivent travailler de
façon collaborative, c’est-à-dire pouvoir consulter des
informations sur les programmes existants, créer de
nouveaux SBC à plusieurs ou compléter un SBC
existant en y introduisant de nouveaux programmes et
de nouvelles connaissances.
Les environnements de pilotage ont originellement
été conçus pour être mono-site. Cependant, de plus en
plus, les constituants d’un environnement de pilotage
(cf. § 2) peuvent être localisés sur différents sites. Non
seulement les codes et/ou les données ne sont pas
obligatoirement sur le même site, mais des parties du
moteur lui-même peuvent être délocalisées, pour des
raisons de performances, de particularités matérielles,
etc. [5]. Un environnement mono-site ne suffit plus, car
il implique l’installation de tous les composants en
particulier, les programmes et la base de connaissances
complète sur ce site. Or, ceci n'est pas toujours possible
ni souhaitable. D’une part, l’installation et la
maintenance de codes reste un lourd problème qui
nécessite temps et compétence. S’ajoute à cela le fait
que les programmes s’avèrent souvent peu portables et
sont difficiles à installer (car nécessitant l’appel à
d’autres utilitaires ou dépendants d’environnements de
développements, ou de compilateurs). D’autre part,
lorsque des utilisateurs sur différents sites créent des
(parties de) bases de connaissances, ils développent de
ce fait une compétence propre qu’il est intéressant de
mettre facilement à disposition d’une communauté
utilisatrice de techniques similaires. Le rapatriement de
ces connaissances sur tous les sites utilisateurs poserait
des problèmes de cohérence et de maintenance.
La mise en place d’architectures et de services pour
la résolution distribuée de problèmes de pilotage peut
s’effectuer selon deux axes. D’une part, la mise en
place de serveurs de connaissances permet le partage et
la diffusion des connaissances sur de multiples sites
clients. D’autre part, la mise à disposition d’un même
environnement de pilotage à un ensemble d’utilisateurs
permet de mettre en commun les connaissances
développées sur différents sites. Ainsi, chaque site
permet l’utilisation de façon transparente des
ressources (programmes et connaissances) d’autres
sites. Chaque site devient client des compétences
d’autrui et serveur de ses propres compétences. Par
conséquent, si des programmes liés à une même
problématique sont développés dans des équipes
disséminées, le pilotage distribué peut permettre une
résolution coopérative de problèmes, dans laquelle
chaque étape représente le savoir-faire d’une équipe. Il
permet aussi à des chercheurs de confronter leurs
expériences et d’enrichir leurs résultats.
Pour cela, nous avons étudié différentes modalités
de distribution d’un système de pilotage. Différents cas
�de distribution sont donc à envisager : par exemple, un
utilisateur peut lancer une requête de traitement sur des
données et des programmes locaux, avec une base de
connaissances et un moteur distants. Chaque forme de
distribution engendre des problèmes différents dus à la
complexité des données à transférer, à l’hétérogénéité
des langages et des environnements de développement,
à des besoins spécifiques de ressources (matérielles ou
logicielles) pour l’exécution de certains programmes, à
la gestion de la cohérence des connaissances d’usage
sur les mêmes programmes en différents sites, etc. Par
exemple, un moteur sur un site et une base de
connaissances sur un autre site engendrent des accès
coûteux [5].
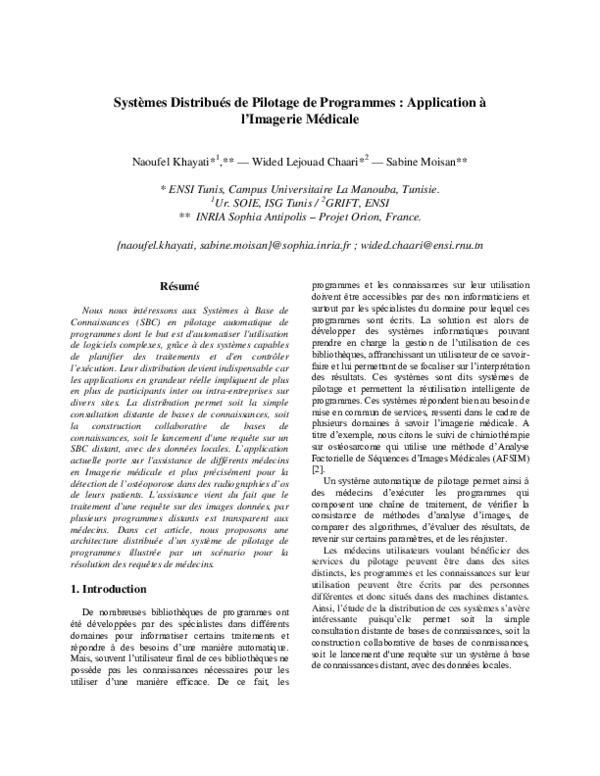
système multi-agents à base d’agents mobiles qui ont
pour rôle de migrer d’un site à un autre pour exécuter
des programmes distants. Cette architecture, donnée
dans la figure 1, comprend un serveur de pilotage (cf. §
4.3) qui joue le rôle d’un intermédiaire entre
l’utilisateur final et le système de pilotage composé de
serveurs de programmes, de serveurs de connaissances
et d’un moteur de pilotage.
Serveurs de programmes
Serveur de pilotage
Agents
Mobiles
Utilisateur final
4. Architecture d’un système de pilotage
distribué
Moteur
de pilotage
4.1. Choix d’une technique de distribution
Afin d’implanter une architecture adéquate pour notre
système de pilotage distribué, nous avons étudié des
techniques réseaux à savoir la technologie Peer-to-Peer
[4] et le Grid Computing [3,4] et déduit ce qui suit : les
grilles se sont intéressées aux services et applications
relativement sophistiqués, reliant peu de sites dans des
collaborations engagées dans des applications
scientifiques complexes. En revanche, les systèmes
P2P font intervenir beaucoup plus de participants, et
offrent des services non sophistiqués, limités et
spécialisés, tels que le partage de fichiers.
Dans notre cas, le système de pilotage distribué
doit être puissant, ne doit pas se limiter à de simples
opérations d’échange de fichiers mais plutôt doit offrir
des fonctionnalités complexes telles que l’exécution de
programmes distants et l’accès en différents modes aux
données et aux fichiers de connaissances, et doit
pouvoir paralléliser des traitements afin de les
accélérer, comme par exemple dans le cas où nous
voulons appliquer le même algorithme sur les différents
segments d’une image radio d’un os (cas de
l’ostéoporose) sachant qu’elle peut comprendre entre
2000 et 4000 segments.
Par conséquent, nous avons opté pour une architecture
GRID puisqu’elle offre des stratégies plus riches
permettant d’accélérer les traitements et d’augmenter la
collaboration.
4.2. Architecture proposée
L’architecture proposée est alors une « petite » grille
équipée d’un entrepôt de méta-données servant à la
localisation des différentes ressources et gérée par un
Méta-données
Serveurs de connaissances
4.3. SPI : un serveur de pilotage via le Web
Au cours de travaux antérieurs nous avons d’une
part, développé un prototype de serveur de pilotage,
nommé SPI [1], et d’autre part, construit deux bases de
connaissances de test sur l’indexation et la
reconstruction 3D [7] et l’imagerie médicale (en
MatLab) pour la détection de l’ostéoporose. Il est à
noter que les programmes de détection de
l’ostéoporose sont écrits par Sylvie Sevestre-Ghalila et
sont basés sur une approche de morphologie
mathématique et sachant que l'étude des données
inhérentes au diagnostic de la maladie de l'ostéoporose
a été faite en collaboration avec le service de
Radiologie de l'hôpital Charles Nicolle de Tunis.
SPI permet la consultation et la modification à
distance de telles bases et l’accès authentifié de
différents utilisateurs. Il s’occupe du traitement de leurs
requêtes, rapatrie les données, délègue le traitement,
récupère les résultats et les renvoie à l’utilisateur. SPI
est en cours de développement pour améliorer la
gestion des accès concurrents et de la cohérence des
bases de connaissances.
Ce serveur joue le rôle d’un intermédiaire entre le
système de pilotage et l’utilisateur. Ainsi, il
communique avec les autres composants et met en
place un système d’agents mobiles pour les traitements
complexes de résolution de requêtes ou de mise à jour
des différents constituants du système. Pour la
�migration des agents, la politique actuelle est de laisser
les programmes appelés sur leurs localités respectives,
de faire migrer les données sur le site où se trouvent les
programmes et de récupérer les résultats pour les
transmettre au demandeur. Mais le serveur devra
pouvoir dans le futur mettre en œuvre différents
scénarii de distribution (migration des programmes et
des données, par exemple).
4.4. Modèle d’Agents Mobiles
Notre système a besoin au moins de deux types
d’agents mobiles, agent « Solveur » et agent
« Evaluateur » qui
se
caractérisent
par
un
comportement et un ensemble de connaissances.
Comportement des agents. L’agent « Solveur » est
créé au niveau du serveur de pilotage, il fait le parcours
des programmes planifiés par le moteur en lançant leur
exécution et en stockant dans son contexte le résultat
de chaque itération et les paramètres d’exécution pour
les opérateurs suivants. Quant à l’agent « Evaluateur »,
il est créé au niveau des sites de programmes,
s’intéresse à la phase d’évaluation du résultat
d’exécution d’un opérateur ou d’un ensemble
d’opérateurs et stocke dans son contexte le résultat du
jugement. Le nombre d’agents « Evaluateurs » dépend
du nombre d’évaluations nécessaires.
Connaissances des agents. L’agent « Solveur » a
comme connaissances :
• Une liste de programmes distants à exécuter ainsi
que leurs arguments respectifs.
• La liste correspondante des sites de programmes à
visiter.
• La liste de ses accointances, à savoir les agents
« Evaluateurs » avec lesquels il communique.
Quant à l’agent « Evaluateur », il a comme
connaissances :
• Le résultat à évaluer.
• Le site vers lequel il doit migrer (site de
l’utilisateur si l’évaluation est manuelle ou site du
moteur si l’évaluation est automatique).
• La liste de ses accointances à savoir le ou les
agents « Solveurs » avec qui il communique.
5. Scénario pour la résolution des requêtes
de médecins
Le scénario suivant décrit la façon de résoudre une
requête en utilisant le moteur de pilotage PEGASE de
l’INRIA. Ce moteur se base sur différents critères
implémentés par des règles de production qui jouent un
rôle important au cours du raisonnement, i.e. pour
choisir entre différentes alternatives (critères de choix),
pour adapter l’exécution des programmes (critères
d’initialisation), pour diagnostiquer la qualité des
résultats (critères d’évaluation) et pour réparer une
mauvaise exécution (critères de réparation et critères
d’ajustement). Ces règles sont écrites par des experts
sur l’utilisation des programmes.
Une fois connecté au serveur de pilotage SPI, le
médecin peut lancer sa requête tout en spécifiant la
base de connaissances à interroger en la sélectionnant à
partir d’une liste ainsi que les données en entrée.
Recevant la requête, le serveur la transforme en un
objectif de pilotage de programmes c'est-à-dire en une
fonctionnalité compréhensible par le moteur PEGASE,
ensuite, vérifie la cohérence des données en entrée avec
celles de la fonctionnalité du point de vue nombre et
types et enfin, la communique au moteur.
Considérons par exemple, une requête de détection
de l’ostéoporose par une approche de morphologie
mathématique. En se référant au contenu des métadonnées, le serveur déduit qu’elle peut être résolue
grâce à la fonctionnalité « Morphology » réalisée par
l’opérateur composite (combinaison de programmes)
« OsteoMorpho » et il commence par la localisation des
fichiers de connaissances à utiliser pour cette requête,
par exemples, « osteoporose.kb » le fichier décrivant
cette base, « primitives.yakl » et « composites.yakl »
qui décrivent respectivement les opérateurs primitifs
(élémentaires correspondant à des programmes) et les
opérateurs composites. La figure 2 représente un
exemple de méta-donnée concernant les programmes
de détection de l’ostéoporose par une approche de
morphologie mathématique. Cette méta-donnée est
décrite à l’aide de RDF et fournit l’auteur, la
fonctionnalité, les différents fichiers et leurs sites.
Une fois ces fichiers sont localisés, le moteur de
pilotage peut commencer la phase de planification de
l’exécution des différents programmes distants c’est à
dire construire un plan ou une partie de plan
d’exécution de ces programmes.
<Rdf : Ostéoporose Morphologie Mathématique>
<Rdf : Author> Sevestre, Sylvie </Rdf:Author>
<Rdf
:
Functionality>
Morphology
</Rdf
Functionality>
<Rdf : Operator> OsteoMorpho </Rdf : Operator>
<Rdf
:
KB>
osteoporose.kb
Rdf
siteKB="http://hellix.inria.fr" </Rdf:KB>
<Rdf
:
Yakl>
composites.yakl
Rdf
siteYakl="http://www.ensi.tn"</Rdf:Yakl>
<Rdf
:
Yakl>
primitives.yakl
Rdf
siteYakl="http://ara.inria.fr"</Rdf:Yakl>
</Rdf : Ostéoporose Morphologie Mathématique >
:
:
:
:
�Pour ce faire, le moteur de pilotage PEGASE
commence par la décomposition de l’opérateur
« OsteoMorpho » en sous opérateurs de plus en plus
concrets (composites ou primitifs).
La figure 3 représente un graphe de la base de
détection de l’ostéoporose montrant le plan d’exécution
des programmes, généré par le moteur PEGASE pour
répondre à cette requête.
« OstéoMorpho »
se
décompose
en
une
séquence d’opérateurs : lecture – squelettisation –
analyse. Pour pouvoir décider du nombre d’agents
solveurs et du moment de passage à l’exécution des
opérateurs planifiés, nous allons tenir compte lors de la
planification de :
• la dépendance entre les programmes c’est à dire si
les (une partie des) sorties de l’un sont des entrées
pour l’autre ;
• l’évaluation c'est-à-dire que la planification
s’arrête uniquement quand elle rencontre un
opérateur nécessitant l’évaluation de son résultat.
Seul l’opérateur lecture est primitif, mais il ne nécessite
pas d’évaluation ainsi PEGASE poursuit son chemin en
décomposant « squelettisation » en deux opérateurs
alternatifs : SqueletteBin | SqueletteGris. Le choix de
l’un ou de l’autre des opérateurs peut être effectué par
l’utilisateur ou par PEGASE lui-même, selon les règles
de choix décrites.
- Si le choix est automatique, selon des paramètres et
des critères de choix PEGASE décide de l’opérateur à
planifier. D’ailleurs, on peut envisager un opérateur par
défaut.
- Si le choix est effectué par l’utilisateur, le moteur
envoie au serveur la demande de choix qui peut être
sous la forme d’une question « Voulez vous effectuer
une squelettisation binaire ou une squelettisation en
niveau de gris ? ». La réponse de l’utilisateur sera
transmise au moteur pour qu’il prenne en considération
ce choix dans sa planification. Supposons que selon le
choix, le programme SqueletteBin a été planifié.
A ce niveau, la squelettisation nécessite une
évaluation, donc PEGASE informe le serveur de
pilotage des noms des programmes à exécuter (lecture
et SqueletteBin), de leurs emplacements, ainsi que du
type de l’évaluation des résultats (pour SqueletteBin).
Par la suite, un agent « Solveur » sera créé et informé
de tous ces paramètres (programmes, emplacements et
type de l’évaluation). Cet agent commence par la
migration vers le site distant du programme « lecture »
ayant dans son contexte, outre les paramètres
précédents, les données à traiter.
Une fois ce programme est exécuté, l’agent « Solveur »
migre vers le site du programme suivant (SqueletteBin)
portant avec lui le résultat de « lecture » et les
paramètres nécessaires à l’exécution du nouveau
programme. Une fois l’exécution du plan ou de la
partie du plan fournie par Pégase est terminée, il est
temps de passer à la phase d’évaluation des résultats
prise en charge par l’agent « Evaluateur ». Cet agent
sera informé par le « Solveur » du résultat et du type de
l’évaluation pour lui permettre de décider du lieu de
migration :
- Si l’évaluation est automatique, il migre vers le site
du moteur de pilotage ;
- Si l’évaluation est manuelle, il migre vers le serveur
de pilotage pour demander l’avis de l’utilisateur.
L’« Evaluateur » termine par envoyer ce jugement au
moteur.
* Si le jugement est positif, le moteur continue sa
planification avec l’opérateur composite « Analyse » et
transmet son plan à l’agent « Solveur ».
* Si le jugement est négatif, le moteur va utiliser
des critères de réparation ou d’ajustement des
paramètres pour décider de relancer la planification ou
de relancer l’exécution du même plan.
- S’il traite des critères de réparation, le moteur
va réparer l’ancien plan, par exemple, en ajoutant un
opérateur optionnel non considéré précédemment ou en
optant pour un deuxième opérateur s’il s’agit d’un
choix. Dans ce cas, nous avons une re-planification et
le « Solveur » sera informé du nouveau plan et va se
comporter de la même manière qu’avec l’ancien plan.
- S’il traite des critères d’ajustement et selon ces
critères, le moteur réajuste quelques paramètres de
programmes. Ce réajustement peut être automatique
(fait par le moteur) ou manuel. Dans le cas du
�réajustement manuel, le moteur transmet une demande
d’ajustement de paramètre au serveur pour être traitée
par l’utilisateur, comme par exemple : « Pour réparer le
plan, voulez vous réajuster le paramètre P de 10 à 9 ou
à 8 ? ». Le serveur remet le paramètre ajusté
directement au « Solveur » qui re-exécute son
programme en tenant compte de la mise à jour apportée
sur le(s) paramètre(s).
Ceci se répète jusqu'à arriver au dernier programme
(attributs ou attribus_direction). L’agent « Solveur »
exécute cet opérateur tout en étant informé qu’il
représente le dernier programme afin qu’il puisse
revenir au serveur de pilotage muni du résultat final du
pilotage (la réponse à la requête). A son tour le moteur
expédie le plan établi au serveur. Finalement, ce
dernier transmet le tout à l’utilisateur final.
6. Conclusion
Les environnements de pilotage ont originellement
été conçus pour être mono-site. Cependant, leur intérêt
et la nature de leurs composants ont rendu nécessaire
leur distribution afin d’offrir des services à des
utilisateurs distants, médecins dans notre cas, qui
souhaitent utiliser les facilités de résolution optimale
du pilotage pour traiter leurs données ou de permettre
des accès à des experts et à des concepteurs pour
diffuser et partager des bibliothèques de programmes.
Dans cet article, nous avons proposé une architecture
d’un système de pilotage distribué combinant une
technologie réseau (Grid Computing) pour la
distribution et une technologie IA (Agents mobiles)
pour le traitement distribué. Puis, nous avons montré
comment un tel système se comporte pour résoudre une
requête de détection de l’ostéoporose.
L’intérêt de ce travail a été ressenti par des équipes
diverses dont l’équipe du CHR d’Orléans qui
s’intéresse aussi à la détection de l’ostéoporose. Un
travail prochain portera sur l’intégration des
programmes de cette équipe dans notre système
distribué a
1
Remerciements
Nous remercions Sylvie Sevestre-Ghalila, Maître de
conférences à l’Ecole Supérieure de Statistique et Analyse de
l'Information de Tunis et à l’Université de Paris 5, l’auteur
des programmes de détection de l’ostéoporose par une
approche de morphologie mathématique pour ses aides
judicieuses et pour l’intérêt qu’elle porte sur notre travail.
Bibliographie
[1] Ben Salah T., Conception et réalisation d’un outil
sécurisé pour la gestion des ressources distribuées sur
Internet : application au pilotage de programmes , Rapport
de stage de 3ème année, ENSI Tunis, juin 2000.
*+, "
2
#
%
& "
3 4
5
6
5
;<;=!>=
899:
*;, %
'
!
&5'7
?8@!?+= A B
"
#
'
C
899:
"# %
$ %
&
'
(
)
8=(;) +<<8
*@, %
'
'
#
" *
$
$
)
( + +(
)
,
%
- .
( + +(
/%( ( 0123$ %
+<<; C D
"#
[5] Lejouad W., “Etude et application des techniques de
distribution pour un générateur de systèmes à base de
connaissances”. Thèse, université de Nice, Nice, juillet
1994.
[6] Moisan S., Lejouad-Chaari W., “ Réutilisation
intelligente de programmes de vision en environnement
distribué ”, TAIMA 2001, 2èmes ateliers Traitement et
Analyse d’Images : Méthodes et Applications, Hammamet,
Tunisie, Octobre 2001.
[7] Ouali A., “Vers la conception d’une base de
connaissances pour le pilotage de programmes d’analyse
d’images”, Rapport de stage de 3ème année, ENSI Tunis, juin
2000.
[8] Thonnat M., Moisan S., “What can Program Supervision
Do for Software Reuse ?”, IEE Proceedings-Software.
Special Issue on Knowledge Modelling for Software
Components Reuse, 147(5) : 179-185, October 2000.
*9, 4
& 4 5
+6
(
5
EC-5 9=
;!>
'A6'# &
#
%
A
899=
�
 Wided Chaari
Wided Chaari N. Khayati
N. Khayati